-
@G. Gong 1
Chapter 5. Signal Representation and Detection (Chapter 3 in the
text book)
Chapter 5. Signal Representation and Detection (Chapter 3 in the
text book)
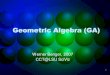
Consider digital transmission systems that are, in general,
M-ary.
1. Conversion of Waveform to Vector Space 2. Geometric
Interpretation of Signals3. Demodulation4. Response of Bank of
Correlators to Noisy Input5. Detection of Signals in Noise6.
Probability of Error for Signals in AWGN7. Matched Filters and
Signal-to-Noise Ratio (SNR)
Maximization
-
Message sink
}{ im
}1,...,1,0{ −∈ Mmi
Vector encoder Modulator
To Channel:
(one message each Tm s)
(one signal each Ts s)
n(t)
( )iNiii sss ,...,, 21=sim
},...,2,1|)({ Mitsi =
)(tsi
DemodVector detector
( )iNiii rrr ,...,, 21=rim̂
Decision: minimum the prob. of error Figure 1.
)()()( tntstr ii +=
channel:AWGN +
)}({ tri
Ts
Message sink
mM
m TR /)(log2=
-
@G. Gong 3
iM
mPp ii allfor 1}emitted { ==
Message source:One message symbol mi each Tmseconds, there are m
different symbols and all of them occur equally likely, ( )iNiiii
sssm ,...,, 21=sa
Vector encoder:Mapping a symbol to a real-valued vector of
dimension N ≤ M,
∫ ∞
-
)(2
)( and 0)]([ 0 τδτN
RtnE n ==
Waveform channel:
LTI system, bandwidth accomodates si(t) without distortion, and
noise is added.
where n(t) is an additive white Gaussian noise.
sii Tttntstr
-
A. Review of Inner product (Euclidean) space
1. Conversion of Waveforms to Vector Space Representation
1. Conversion of Waveforms to Vector Space Representation
Inner product:
V∈>< βααββα , ,, , *(1) Symmetry:
)0 iff 0( 0 , ==≥>< ααα(2) Positive definite:
CbaVbaba ∈∈>=+< , ,,, ,,,, 212121 βααβαβαβαα
(3) Linearity:
Consider V, a linear space over the complex number field C.
-
@G. Gong 6
B. Signal Space Representation
∫=><T
dttytxtytx0
)()( )(),(
Definitions.
Inner product of two real-valued signal x(t) and y(t) defined on
the interval [0, T] is defined by
0)( )()(),()(2/1
0
22/1 ≥=⎥⎦⎤
⎢⎣⎡=>=< ∫ Edttxtxtxtx
T
Norm (or length) of a signal x(t) is defined by
Energy of the signal
-
@G. Gong 7
Orthogonal set: A set of N signals waveforms is called
orthogonal iff
{ }Njtj ≤≤1|)( φ
⎩⎨⎧
≠=
>=<jijic
tt jji ,0 ,
)(),( φφ
∫ ⎩⎨⎧
≠==
Tji ji
jidttt0 ,0
,1)()( φφ
If , unit energy, then the signal set is called orthonormal,
i.e.,
1 , i.e. , 1 =∀= jj Ejc{ } )( tjφ
-
).(on
)( of projection theis which gives )()( :Note0
t
tssdttts
j
iijT
ji
φ
φ∫
C. Gram-Schmidt Orthogonalization Process
∑=
≤≤==N
jjiji TtMitsts
1
0 , ..., ,2 ,1 , )()( φ
{ }Mitsi ≤≤1|)(
{ } MNNjtj ≤≤≤ where1|)(φ
∫>==<T
jijiij dtttsttss0
)()()(),( where φφ
Any signal si(t) in a set of M energy signals can be represented
by a linear combination of a set of Northonormal functions as
(1)
-
@G. Gong 9
Thus, using the set of the basis functions, each signal si(t)
maps to a set of N real numbers, which is a N dimensional
real-valued vector
( )iNiii sss ,...,, 21=s
( )⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
)(
)()(
,...,,)( 21
21
t
tt
sssts
N
iNiii
φ
φφ
M
The representation (1) has the following matrix form:
This is a 1-1 correspondence between the signal set (or
equivalently, the message symbol set) and the N dimensional vector
space.
-
@G. Gong 10
)()()(),( where
)()(
such that ,...,1 and 0for
functions basis lorthonorma :)}({
0
1
∫
∑
>==<
=
=
-
@G. Gong 11
Procedure
energy.unit has )( and where
)()()(
1
111
111111
tEs
tstEts
φ
φφ
=
==⇒
∫==
=
=
TdttsE
Etstgtgt
tstg
0
211
1
1
1
11
11
)( )(
length)(unit )()( )(
)(direction )( )(
φ
Step 1.∫=
Tdtttss
0 1221)()( φ
Step 2. Compute:
))()(( )( )( )( 1212122 ttgtststg φφ ⊥−=
)(direction 0 )(),( 12 =>
-
2212
221
2212
0
222
2
)()(
sE
ssE
dttgtgT
−=
+−=
= ∫
Compute the norm of g2(t):
)( 0
222 ∫=
TdttsE
)()()(
2
22 tg
tgt =φ
Set
2212
1212 )()(sE
tsts−
−=
φ
1)(||)(||0
222 == ∫
Tdttt φφ
We have
0 )()( and 0 21
=∫T
dttt φφ
∫=T
dtttss0 1221
)()( φ
Step 2.
Compute:
))()(( )( )( )( 1212122 ttgtststg φφ ⊥−=
)(direction 0 )(),( 12 =>
-
@G. Gong 13
)(direction )()()(1
1∑−
=
−=n
jjnjnn tststg φ
∑
∑−
=
−
=
−
−=
1
1
2
1
1)()(
n
jnjn
n
jjnjn
sE
tsts φ
11, )(),( ,...,n- jttss jnnj =>=< φStep n. Compute:
length)(unit )()()(
tgtgt
n
nn =φ
∑−
=
−=1
1
2||)(||n
jnjnn sEtg ))()((
0
22 ∫==T
nnn dttstsE
)(),...,(byfor accountedalready
)( of components
11 tt
ts
n
n
−φφ
-
@G. Gong 14
.0)( gives that )(signalany skipjust , case In this
).(),...,(
ofn combinatio aby for accountedalready not component no has )(
because 0)( So,
0)()(that happen may It
processed. are )(),...,( signals all until proceeded is
procedure This
11
1
1
1
=
=
=−
−
−
=∑
ttstt
tst
tsts
tsts
nn
n
nn
n
jjnjn
M
φφφ
φ
φ
-
@G. Gong 15
)(1 ts
t0
1
2
)(2 ts
t0
12
1-1
0
1
31-1
)(3 ts
t
)(4 ts
t0
1
3
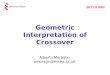
Example. A set of four waveform is illustrated as below. Find an
orthonormal set for this set of signals by applying the
Gram-Schmidt procedure.
-
@G. Gong 16
30 , 2/)()( 11 ≤≤= ttstφ
Solution.
Step 1. 3 , 2 1 )()( 2
0
3
0
210
211 ===== ∫∫∫ TdtdttsdttsE
T
Step 2.
0 )11( 1 2
1
)()()()(
2
0
2
0
3
0 120 1221
=⋅−+=
==
∫∫
∫∫dtdt
dtttsdtttssT
φφ )( )( 12 tts φ⊥⇒
)211)( (
2/)( /)()(
0
222
2222
=+==
==
∫T
dttsE
tsEtstφSet
-
@G. Gong 17
)(2)(||)(||
)()( 233
33 ttstg
tgt φφ +== )( and )( of
n combinatiolinear a is )( , i.e.
31
4
ttts
φφ
Step 3. Step 4.
2)()(
0)()(
0 2332
0 1331
−==
==
∫∫
T
T
dtttss
dtttss
φ
φ
)(2)()( 233 ttstg φ+=⇒
{ } 1)()( 2/10
233 == ∫
Tdttgtg
1 ,0
2)()(
4342
0 1441
==
== ∫ss
dtttssT
φ
0)()(2)()( 3144 =−−=⇒ tttstg φφ
))()()()( ( 3214 tstststs ++=
-
@G. Gong 18
2
21
0 t
)(1 tφ
t
)(3 tφ
20 3
1
2
21
0 t
)(2 tφ
21
−1
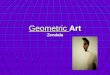
Thus is an orthonormal set. })( ),( ,)({ 321 ttt φφφ
-
2. Geometric Interpretation of Signals2. Geometric
Interpretation of Signals
A. Signal Sets and Signal Constellations
Definition 1. Let be a signal set,be an orthonormal set and
{ }MitsS i ≤≤= 1|)( { }Njtj ≤≤1|)(φ
∑=
≤≤==N
jjiji TtMitsts
1
0 , ..., ,2 ,1 , )()( φ
RdtttsttssT
jijiij ∈>==< ∫ )()()(),( where 0 φφ
Then NiNii Rsss ∈= ),,,( 121 Ls
where R is the real number set.
is called the vector representation of the signal si(t) and {si,
i = 1, … , M} is called a signal constellation of the signal set
S.
Remark. RN is the set consisting of all vectors of dimension N
whose entries are taken from the real number set R, which is a
Euclidean space of dimension N. Thus si is a point in the Euclidean
space RN.
-
@G. Gong 20
Example 1. Find the vector representation and the signal
constellation of the signal set in the example of Section 1.
Solution. From the example in Section 1, we have
)0,0,2()(2)()( 111111 =⇒== sttsts φφ
)0,2,0()(2)( 222 =⇒= stts φ
)1,2,0()()(2)( 3323 −=⇒+−= sttts φφ
)1,0,2( )()(2
)()()()(
4
31
3214
=⇒+=
++=
stt
tstststsφφ
)(1 tφ
)(2 tφ
)(3 tφ
2
1s
2s
4s3s
2
-
@G. Gong 21
t
)(1 tφ
0
1
1
20 t
)(3 tφ
3
1
)(2 tφ
20 t1
1
( ) ( )( ) ( )1,1,1 , 1,1,1
, 0,1,1 ,0,1,143
21=−=
−==ss
ss
Remark. The basis function set is not unique, thus t he vector
representation of a signal set is not unique. For example, the
following set is another basis function set for the signal set in
the above example. Under this set, the vector representation of the
signals are
},...,1|)({ Njtj =φ
)(1 tφ
)(2 tφ
)(3 tφ
1s2s
4s
3s
1
1
1
-
@G. Gong 22
Example 2. (a) Manchester encoding (this method is used in many
commertial disk storage product and also in what is known as 10BT
or Ethernet. )
Let
⎪⎩
⎪⎨⎧ ≤≤=
otherwise 02/0for 2)(1
Tt /Ttφ⎪⎩
⎪⎨⎧ ≤≤=
otherwise 02for 2)(2
Tt T/ /Ttφ
Then is an orthonormal set. The Manchester encode is as
follows.
)}(),({ 21 tt φφ
)()()( 211 ttts φφ −= )1,1(1 −=⇒ s
)()()( 212 ttts φφ +−= )1,1(2 −=⇒ s
Remark.The data rate equals one bit per T seconds, for a data
transfer rate into a disk of 24 Mbytes/s or 192 Mbps, T =
1/(192Htz), for a data rate of 10Mbps in “Ethernet”, T = 100ns.
-
@G. Gong 23
Figure 2. Manchester (Ethernet) basis functions and
waveforms
TT/2 t
T/2T/1
TT/2 t
T/2T/1
)(2 ts
)(1 ts
TT/2 t
T/2T/1
TT/2 t
T/2T/1
)(2 tφ
)(1 tφ
)(1 tφ
)(2 tφ
1s
2s Figure 3. Manchester signal constellation
-
@G. Gong 24
Example 2. (b). Binary phase-shift keying (BPSK) (used in some
satellite and deep-space transmissions).
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧≤≤⎟
⎠⎞
⎜⎝⎛ +
=otherwise0
0 if4
2cos2
)(1
TtT
tT
t
ππ
φ
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧≤≤⎟
⎠⎞
⎜⎝⎛ −
=otherwise0
0 if4
2cos2
)(1
TtT
tT
t
ππ
φ
Then is an orthonormal set (verify this). BPSK signals are
)}(),({ 21 tt φφ
Tt
Tπ2sin2−=)()()( 211 ttts φφ −= )1,1(1 −=⇒ s
)()()( 212 ttts φφ +−= )1,1(2 −=⇒ sTt
Tπ2sin2=
-
@G. Gong 25
TT/2 t
T/2T/1
TT/2 t
T/2T/1
TT/2 t
T/2T/1
)(2 tφ
TT/2 t
T/2T/1
)(2 ts
Figure 4. BPSK basis functions and waveforms
)(1 ts)(1 tφ
)(1 tφ
)(2 tφ
1s
2s Figure 5. BPSK signal constellation
-
@G. Gong 26
Remark. Important phenomenon: BPSK have the same constellations
as Manchester, shown in Figure 3, although the basis functions
differ from the previous. The common vector space representation
(i.e., signal constellation) of the Ether net and BPSK examples
allows the performance of a detector to be analyzed for either
systems in the same way, despite the gross differences in the
overall systems.
In either of the systems in Example 2, (a)-(b), a more compact
representation of the signals with one basis function is possible
(leave it as an exercise).
-
@G. Gong 27
Example 3. (ISDN -2B1Q) For the quaternary signaling, we have N
= 1 and M = 4. The integrated services digital network (ISDN)
transmits 2bits/s and uses a basis function that is the Nyquist
pulse shape
TtTt
Tt ≤≤⎟
⎠⎞
⎜⎝⎛= 0 ,csin1)(1φ
where 1/T = 80khz. The signal constellation is as follows.
)(1 tφ-3 -1 1 3
Figure 6. 2B1Q signal constellation
(2 bits are transmitted using one 4 level (or quaternary )
symbol every Tsecond, hence the name 2B1Q.)
Remark. Telephone companies, R = 1.544Mbps. A method, known as
HDSL (high-bit-rate digital subscriber lines) uses 2B1Q with 1/T =
392 kHz. Thus it transmits a data rate of 784 kbps on each of two
phone lines for a total of 1.568 Mbps (1.544 Mbps plus 24 kbps
overhead).
-
@G. Gong 28
B. Properties of Inner Products
We have mapped a signal to a vector in the linear space RN,
i.e.,
∑=
>=<N
kjkikji ss
1
, ss
ii ts sa)( The inner product of si and sj is defined as
Theorem 1 (invariance of inner product). >>==<T
jiji dttstststs0
)()()(),(
Note that )()(,
ttss rrk
kjrik φφ∑=
∫>=⇒<T
ji tsts0
)(),( dtttss rrk
kjrik )()(,
φφ∑ dtttss rrk
k
T
jrik )()(, 0
φφ∑ ∫= ∑= k jkikss
⎩⎨⎧
≠=
=∫ rkrk
dtttT
rk 01
)()(0
φφsince>=< ji ss ,
-
@G. Gong 29
Remark. We introduce the notation of the Kronecker delta
function:
⎩⎨⎧
≠=
=jiji
ij 01
δ
Thus the orthonormal set can be characterized as},...,1|)({ Njtj
=φ
ij
T
ji dttt δφφ =∫0
)()(
>=
-
@G. Gong 30
Property 1. (The squared distance between two signals) The
(Euclidean) squared distance between two signals is defined as si
and sj
22 |||| jiijd ss −=
Then ∑∫ −=−=−=k
jkikT
jijiij ssdttstsd2
0
222 )())()((|||| ss
Or equivalently, ∑−+=k
jkikjiij ssd 2||||||||222 ss
(3)
(4)
Definition 2(average energy). The average energy of a signal
constellation is defined by
∑=
==M
iiiS PEE
1
2 }{||||||][|| sss
-
@G. Gong 31
{ }im { } is { })(tsisource Vectorencoder { }Njj ≤≤1|
modulator φ
transmitter
{ }Mi ,...,1∈
( )iNii ss ,...,1=s
×
)(tNφ
×
)(1 tφ
iNs
2is
1is
×)(2 tφ
+ )(tsi
...
Figure 6. Implementation of generating the signal set {
})(tsi
-
@G. Gong 32
3. Demodulation3. Demodulation
The computation of the coordinates of the received signal is
accomplished by the parallel bank of multiplier-integrators. Each
multiplier-integrator combination is referred to as a correlator.
The overall structure is called a correlative demodulation (or
correlative receiver). See Figure 1 (for simplicity, in the
following, we will write y(t) = ri(t)).
)()()( tntntn pr +=Remark. The noise cannot, in general, be
represented in the vector space. But we always can have the
decomposition: where nr(t) can be represented by a vector under the
N basis functions and np(t) may be ignored in making the decision
as to which signal was sent.
-
@G. Gong 33
Figure 1. Correlative demodulator
)(2 tφ
)(1 tφ
)(tNφ
)(ty
1y
2y
Ny
∫T
dt0
∫T
dt0
∫T
dt0
×
×
×
)n vectorobservatio(y
-
∫=T
ii dyy 0 )()( ττφτ
An interesting phenomenon:
Tti dtTy
=
∞
∞−∫ +−= ττφτ )()(
TtitTty
=−∗= )( )( φ
Thus a correlator can be implemented by a matched filter. The
component of the received waveform y(t) along the ith basis
function is equivalently the convolution of the waveform y(t) with
a filter at output sample time T. This is so called the
matched-filter demodulation, which is “matched” to the
corresponding demodulator basis functions. See Figure 2.
)( tTi −φ
)(tiφ
)(ty iy )(ty)(tiΓ
ii yT =Γ )()( tTi −φ=∫
bT dt0×
Matched filterCorrelator
)( )()( tTtyt ii −∗=Γ φ
∫∞
∞−= ττφτ dy i )()(
-
@G. Gong 35
Figure 2. The matched-filter demodulator
)(ty
)(1 tT −φ 1y
)( tTN −φ Ny
)(2 tT −φ2y
-
@G. Gong 36
4. Response of Bank of Correlators to Noisy Input4. Response of
Bank of Correlators to Noisy Input
AWGN channel
+)(tsi )()()( tntstr ii +=
MiTt
,...,2,10=
≤≤
)(tn
2/0Nwhere n(t) is white Gaussian noise with zero mean and power
spectral density
A. Decision Vector
-
)(tjφ
)(tri
∫T
dt0
×
Figure 3. jth correlator (similar to the jth matched filter)
jij
Tji
Tjiij
ns
dtttnts
dtttrr
+=
+=
=
∫∫
)()]()([
)()(
0
0
φ
φ
∫=T
jiij dtttss0
)()( φ
∫=T
jj dtttnn0
)()( φ
where
-
@G. Gong 38
Since nj is a Gaussian random variable and sij is constant, then
rij is a Gaussian random variable.
Proof.
Property 1. The variable rij is a Gaussian random variable whose
mean and variance are given by
ijij srE =][2
02 Nij =σ
kjrrCov ikij ≠= for 0)( ,
Furthermore, rij and rik are uncorrelated, therefore,
independent
and
ijjijjijijr snEsnsErEij =+=+== ][][][μ
then,0][0)]([ and )()( Since0
=⇒== ∫ jT
jj nEtnEdtttnn φ(a)
-
)])([(),(ikij rikrijikij rrErrCov μμ −−= )])([( ikikijij srsrE
−−= ][ kjnnE=
⎥⎦⎤
⎢⎣⎡ ⋅= ∫∫
T
k
T
j duuundtttnE 00 )()()()( φφ ∫ ∫=T
nkjT
dtduutRut0 0
),()()( φφ
∫ ∫ −=T
kjT
dtduututN
0 00 )()()(
2δφφ
2)()(
20
00
jkT
kjN
dtttN
δφφ == ∫
If , then kj ≠ 0),( =ikij rrCov
If , then 2),( 02
NrrCov ijijijr ==σ kj =
Thus are mutually uncorrelated (i.e., any two of them are
uncorrelated). Since these random variables are Gaussian random
variables, then they are independent.
{ } 1|)( Njtrij ≤≤
-
@G. Gong 40
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
iN
i
i
i
r
rr
M2
1
Define r
.2/ varianceand mean with variablesrandomGaussian t independen
are ,...,2,1 , where
0NsNjr
ij
ij =
B. Likelihood Functions of AWGN
For simplicity, in the following, we will write
)( )( ii mts ⇒
),,,( 21 Ni XXX L== rX
),,,( 21 Nxxx L=xand is a sample of X, i.e., xi is a sample of
Xi. Next, we investigate the conditional probability density
function (pdf) of X given that the signal was transmitted. We
denote it as
)|(| iM mf i XX
-
@G. Gong 41
)|(1
|∏=
=N
jijMX mxf ij (by independence)
2
)(exp
21
12
2
∏= ⎥
⎥
⎦
⎤
⎢⎢
⎣
⎡ −−=
N
j X
Xj
X j
j
j
x
σ
μ
σπ ∏= ⎥
⎥⎦
⎤
⎢⎢⎣
⎡ −−=
N
j
ijj
Nsx
N1 0
2
0
)(exp1
π
)(1exp)( 1
2
0
2/0
⎥⎥⎦
⎤
⎢⎢⎣
⎡−−= ∑
=
−N
jijj
N sxN
Nπ
)|,...,,( )|( 21|,...,,| 21 iNMXXXiM mXXXfmf iNi ΔXX
This conditional pdf is defined by
)|(| iM mf i XX
Thus we have
MiN
N iN ,...,2 ,1 , 1exp)( 2
0
2/0 =⎥
⎦
⎤⎢⎣
⎡−−= − sxπ
(recall that x = ri )
(1)
-
@G. Gong 42
process.making-decision in theerror ofy probabilit
theminimize
wesuch that way ain , symbol tted transmi theof ˆestimatean to
from mapping a perform tohave we
, n vector observatio eGiven th : problem Detection
ii
i
i
mmr
r
/1)( mmP i =If the symbol mi occurs equally likely, i.e., ,
minimize Pe is equivalent to maximize the likelihood function.
The function represented by (1) is called the likelihood
function of the AWGN.