Embed Size (px)
Citation preview

1
PhD Program in Business Administration and Quantitative Methods
FINANCIAL ECONOMETRICS
2006-2007
ESTHER RUIZ
CHAPTER 5. MULTIVARIATE MODELS
Multivariate models are of central interest in several fields of Financial
Econometrics. First of all, international financial markets are dependent of each other
and one must consider them jointly to understand the dynamic structure of international
finance. For example, De Santis and Gerard (1997) test the CAPM for the world’s eight
largest equity markets using a multivariate GARCH model. Their results indicate that,
although severe market declines are contagious, the expected gains from international
diversification for a US investor average 2.11 percent per year and have not
significantly declined over the last two decades. Karolyi (1995) analyses the short-run
dynamics of stocks and volatility for stocks traded on the New York and Toronto stock
exchanges. He shows that inferences about the persistence of returns and the
transmission of effect depend importantly on how the dynamics in volatility are
modelled. He also discusses the implications for international asset pricing, hedging
strategies and regulatory policy. The results of Kearney and Patton (2000) on exchange
rate volatility transmission across the European Monetary System also indicate the
importance of checking for specification on multivariate GARCH models.
On the other hand, financial institutions usually hold multiple assets and the
dynamic relationships between them are important for risk management and asset
allocation. For example, Bollerslev, Engle and Wooldridge (1988) estimate a
multivariate GARCH model for returns to US Treasury Bills, gilts and stocks and
Brooks, Henry and Persand (2002) compared the effectiveness of hedging on the basis
of hedge ration derived from various multivariate GARCH specifications.
In this chapter, we analyse multivariate time series models that represent the
dynamic relationships between two or more variables observed sequentially in time.

2
Suppose that ( )',...,1 kttt yyY = is the vector of observations at time t. Although most of
the models and methods described before for univariate time series can be extended
directly to multivariate systems, there are some situations that require especial methods
and procedures.
5.1 Linear multivariate models
5.1.1 VARMA models for stationary series
The multivariate series tY is weakly stationary if its mean vector and covariance
matrices are constant over time:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
==
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
kkt
t
t
t
y
yy
EYE
μ
μμ
μ......
)( 2
1
2
1
[ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=−−=Γ −
)(...)()(............
)(...)()()(...)()(
)')((
21
2221
1121
hhh
hhhhhh
YYE
kkk
k
k
htth
γγγ
γγγγγγ
μμ
Note that with the exception of 0Γ , these matrices are not symmetric. From the cross-
covariance matrices, it is possible to compute the corresponding cross-correlations
matrices.
The simplest models to represent dynamic relationships between multiple time
series is the VAR(1) model:
ttt aYY +Φ+Φ= −110
where 0Φ is a kx1 vector of constants, 1Φ is a kxk matrix and ta is a sequence of
serially uncorrelated random vectors with mean zero and covariance matrix Σ . The
matrix 1Φ measures the dynamic dependence of tY while the contemporaneous relation
between the series appears in the off-diagonal elements of Σ .
Consider, for example, the bivariate case:
tttt
tttt
ayyyayyy
212221121202
112121111101
+++=+++=
−−
−−
φφφφφφ

3
The stationary condition is satisfied if the roots of the characteristic equation,
01 =Φ− zI are outside the unit circle. In these circumstances, ML and OLS are
asymptotically equivalent.
The adequacy of the model can be checked by applying the )(mQk statistic to
the residuals; see Hosking (1980, 1981) and Li and McLeod (1981). The )(mQk
statistic is given by
[ ]∑=
−− ΓΓΓΓ−
=m
lllk tr
lTTmQ
1
10
10
2 ˆˆˆˆ1)(
The statistic )(mQk is asymptotically distributed as a 2χ distribution with
gmk −2 degrees of freedom where g is the number of estimated parameters in the AR
coefficient matrices.
Unlike the VAR models, the estimation of VMA models is much more involved
and they are not usually fitted in empirical applications.
5.1.2 VAR models for non-stationary series
When dealing with multivariate non-stationary series, it is important to take into
account whether they are co-integrated. The models fitted to non-stationary cointegrated
and non-cointegrated series are different.
Cointegrated series
The series contained in the vector tY are cointegrated if each of the series is I(d)
but there exists at least one linear combination of them which is I(b) where b<d. Note
that if we deal with I(1) variables, as it is often the case in financial prices, then the
linear combination is stationary.
To understand the concept of cointegration, consider that we are modelling a
bivariate system with variables that have a level that evolves locally over time. In this
case,
ttt
ttty
11
11
ημμεμ+=+=
−
and
ttt
ttty
21
22
ηδδεδ+=+=
−

4
If the underlying levels of both variables are related, then ty1 and ty2 are related
in the long run. In this case, consider that, for example,
tt ba μδ +=
Then, the linear combination tttttt bbaybya 2121 εδεμ −−++=−+ is stationary.
Furthermore, we can establish the following long-run relationship between both
variables:
ttt uyy ++= 2101 ββ
where ),1( β− is known as the cointegration vector and β is the parameter that
measures the long-run relationship between the variables.
It is important to note that the stationary linear combination is not unique. In the
example above, we can consider any other linear combination )( 21 tt ybyac −+ which is
also stationary. For this reason, the cointegration vector is always normalized for one of
the variables in the model.
Consider a VAR(p) model to represent the dynamic evolution of a system of I(1)
cointegrated variables
tptptt aYYY +Φ++Φ+Φ= −− ...110
Given that the model is not stationary, we know that 0...1 =Φ−−Φ− pI .
Therefore, the matrix pI Φ−−Φ− ...1 has not full rank. Consider the following
reparametrization of the model:
tptpttt aYYYY +ΔΓ++ΔΓ+Π=Δ −−−−− 11111 ...
where pI Φ−−Φ−=Π ...1 . Suppose that pI Φ++Φ≠ ...1 , so the rank of Π is
different from zero although smaller than k. Tests of cointegration are based on
estimates of the rank of the matrix Π . When the rank is k, there are not unit roots and
the model is stationary. If the rank is zero, the model is not stationary and the variables
are non-cointegrated. Finally, when the rank is between zero and k, the model is not
stationary and the variables are cointegrated. In this case, the rank of the matrix is the
number of cointegrated relationships. The matrix Π can be decomposed as
'αβ=Π
Therefore, the model adequate to represent their dynamic evolution is a VAR with error
correction model given by VAR-ECM:
tptpttt aYYYY +ΔΓ++ΔΓ+=Δ −−−−− 11111 ...'αβ

5
where α is a nxr matrix of coefficients that measure the speed of the adjustment of the
disequilibrium deviations and β is a kxr matrix of long-run coefficients.
Consider, for example, a bivariate system
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡ΔΔ
⎥⎦
⎤⎢⎣
⎡+−−⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡ΔΔ
−
−−−
t
t
t
ttt
t
t
aa
yy
yyyy
2
1
12
11
2221
1211121011
2
1
2
1 )(φφφφ
ββαα
The VAR-ECM can be estimated jointly by ML as proposed by Johansen.
Alternatively, Engle and Granger proposed a two-step estimator based on estimating
first the long run relationships by OLS and then estimating the model using the
residuals from this estimation as proxy variables of the deviations from the long-run
equilibrium.
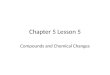
Example: Logarithms of monthly prices of beef in US (LUSA) y Argentina (LARG) from 1977-1997
6.4
6.8
7.2
7.6
8.0
8.4
78 80 82 84 86 88 90 92 94 96LARG LUSA
Augmented Dickey-Fuller tests
Test ADF Statistic Critical values (1%, 5%, 10%)
LUSA (4) -2.833254 -3.9984, -3.4292, -3.1378
DLUSA (4) -7.572660 -3.4585, -2.8734, -2.5730
LARG (4) -2.610202 -3.9984, -3.4292, -3.1378
DLARG (4) -7.482174 -3.4585, -2.8734, -2.5730

6
To analyse the dynamic relationship between both prices, we have included two
dummy variables in the VAR-VEC model, D1t y D2t. D1t is zero up to December and
then takes values 1, 2, 3… up to December 1994, then is zero again up to the end of the
sample. The variable D2t is zero up to December 1994 and one after words. The
estimated model is:
4tLUSA*(0.14)0.163tLUSA*
(0.11)0.152tLUSA*
(0.12)0.051tLUSA*
(0.11)0.02
4tLARG*(0.06)0.093tLARG*
(0.06)0.182tLARG*
(0.06)0.01 +1tLARG*
(0.06)0.19
)2-2tD*(0.11)0.52-1-1tD*
(0.002)0.008-1tLUSA1tLARG
(0.03)0.51(*
(0.03)0.13tLARG
−Δ−−Δ−−Δ+−Δ+
−Δ−−Δ+−Δ−Δ−
−−−+−=Δ
4tLUSA*(0.06)0.063tLUSA*
(0.07)0.042tLUSA*
(0.05)0.221tLUSA*
(0.06)0.46
4tLARG*(0.04)0.063tLARG*
(0.04)0.032tLARG*
(0.04)0.09 +1tLARG*
(0.04)0.0004
)2-2tD*(0.11)0.52-1-1tD*
(0.002)0.008-1tLUSA1tLARG
(0.03)0.51(*
(0.01)0.008tLUSA
−Δ−−Δ−−Δ−−Δ+
−Δ−−Δ+−Δ−Δ−
−−−+=Δ
Non-cointegrated variables
When the variables are not cointegrated, there are not long-run relationships
between the variables. In this case, the matrix Π is zero and the model appropriate to
represent the dynamic evolution of the variables in tY is a VAR model for the first
differences, i.e.
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡ΔΔ
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡ΔΔ
−
−
t
t
t
t
t
t
aa
yy
yy
2
1
12
11
2221
1211
2
1
φφφφ
Finally, note that if we fit a VAR model to the first differences when the series
are cointegrated, we are introducing a non-invertible MA component. Consequently,
when using the AR approximation we need infinite lags to represent the long-run
dependency between the variables.

7
5.2 Multivariate GARCH models
Consider that the series of returns, tY , is given by
ttt HY ε2/1=
where 2/1tH is a kxk positive definite matrix such that tH is the conditional covariance
matrix of tY , tε is a vector of white noise processes such that 0)( =tE ε and
IE tt =)( 'εε .
There are two main branches in the literature related with multivariate models
with GARCH errors. The first type of models represents directly the evolution of the
time-varying covariances while the second type models conditional correlations.
Bauwens, Laurent and Rombouts (2005) and Silvennonen and Teräsvirta (2006) are
very complete and updated surveys on multivariate GARCH models.
Multivariate GARCH models have two additional limitations over the ones
commented in the univariate case. First of all, the number of parameters increases
rapidily with the number of series considered. Furthermore, since tH is a covariance
matrix, positive definiteness has to be ensured.
5.2.1 Models for conditional covariances
The most direct generalization of the univariate GARCH(1,1) model is the VEC model,
proposed by Bollerslev, Engle and Wooldridge (1988), and given by
)()()()( 1'
11 −−− ++= tttt HBvechAvechWvechHvech εε
where vech is the operator that applied to a symmetric matrix put the elements in the
lower diagonal in a column. Consider, for example, the bivariate model with k=2 given
by
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−
−
−−
−
2122
2112
2111
333231
232221
131211
22
1211
211
333231
232221
131211
22
12
11
222
12
211
t
t
t
t
tt
t
t
t
t
bbbbbbbbb
yyy
y
aaaaaaaaa
www
σσσ
σσσ
From where,
212233
211232
211131
2233121132
2113122
222
212223
211222
211121
2223121122
2112112
212
212213
211212
211111
2213121112
2111111
211
−−−−−−
−−−−−−
−−−−−−
++++++=
++++++=
++++++=
tttttttt
tttttttt
tttttttt
bbbyayyayaw
bbbyayyayaw
bbbyayyayaw
σσσσ
σσσσ
σσσσ
The VEC model is covariance stationary if the modulus of the eigenvalues of
BA + are less than one. Hafner (2003) provides analytical expressions of the fourth

8
order moments while Gourieroux (1997) gives sufficient conditions for the positivity of
tH .
The number of parameters in a VEC model is 2
)1)1()(1( +++ kkkk . The
following table reports the number of parameters for 5,3,2=k and 10.
2=k 3=k 5=k 10=k
VEC 21 78 465 6105
DVEC 9 18 45 165
BEKK 11 24 65 255
F-GARCH 7 12 25 75
CCC 7 12 25 75
DCC 9 14 27 77
To overcome the problem of the extremely large number of parameters,
Bollerslev, Engle and Wooldridge (1988) propose to restrict the matrices A and B to be
diagonal. In this case, each element ijth depends only on its own lag and on the previous
value of jtitεε . Therefore, the conditional variances and covariances have a GARCH
specification. Consider, once more, the bivariate model
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−
−
−−
−
2122
2112
2111
33
22
11
22
1211
211
33
22
11
22
12
11
222
12
211
000000
000000
t
t
t
t
tt
t
t
t
t
bb
b
yyy
y
aa
a
www
σσσ
σσσ
212233
2123313
222
21122212112212
212
211111
2111111
211
−−
−−−
−−
++=
++=
++=
ttt
tttt
ttt
byaw
byyaw
byaw
σσ
σσ
σσ
The number of parameters is reduced to 2
)1(3 +kk . Attanasio (1991) analyse the
conditions to guarantee that the conditional covariance matrices are positive definite
which can be imposed through a Cholesky decomposition. The dynamics of the DVEC
model are very restrictive. For example, it is not suitable to represent volatility
transmissions between assets.
There are other proposals based on the Cholesky decomposition to guarantee the
positiviness of tH in the VEC representation; see, for example, Tsay (2002).

9
Because, it is difficult to guarantee the positiviness of tH in the general VEC
model and the DVEC model is too restrictive, Engle and Kroner (1995) proposed the
BEKK specification based on quadratic forms, where
'1
1
''11 jtj
J
jjttjt BHBAAWH −
=−− ++= ∑ εε
Consider, the bivariate model with J=1,
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
+⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
−−
−
−
2212
21112
122112
2111
2221
1211
2212
21112221
211
2221
1211
2212
1122212
211
bbbb
bbbb
aaaa
yyyy
aaaa
www
tt
t
ttt
t
tt
t
σσσ
σσσ
2122
3221122221
2111
221
21222112122
2122
3221122221
2111
221
212
22212112221
211
22122
222
21221222
211222111221
21111121
2121222121122111221
211112112
212
212
2121121211
2111
211
21212111111
2122
2121121211
2111
211
212
21212111211
211
21111
211
2)(
22
)(
)(
2)(
22
−−−−−
−−−−−−−
−−−
−−−−
−−−−−
−−−−−−−
+++++=
++++++=
+++
+++++=
+++++=
++++++=
ttttt
tttttttt
ttt
ttttt
ttttt
tttttttt
bbbbyayaw
bbbbyayyaayaw
bbbbbbbb
yaayyaaaayaaw
bbbbyayaw
bbbbyayyaayaw
σσσ
σσσσ
σσσ
σ
σσσ
σσσσ
The number of parameters is 2
)15( +kk . DVEC and BEKK models are
parsimonious but very restrictive for the cross-dynamics.
Alternatively, Engle, Ng and Rothschild (1990) proposed the Factor-ARCH (F-
ARCH) model using the idea that co-movements of financial returns can depend on a
small number of underlying factors. The F-GARCH model is given by
)( 1'2
1
'11
'2'jtjj
J
jjttjjjjt HWH ωωβωεεωαλλ −
=−− ++= ∑
where ⎩⎨⎧
=≠
=jkjk
jk ,1,0' λω and ∑
=
=K
kjk
1
1ω .
The name factor-GARCH stems from the fact that the time-variation in the
conditional covariance matrix can be summarized by a few linear combinations of
returns. These linear combinations, known as “factor representing portfolios”, are
GARCH models. The factors are related to those linear combinations of the series that
summarize the co-movements in the conditional variances; see Bollerslev and Engle
(1993). Consider, for example, that there is just one factor in a bivariate system. Then
the F-GARCH model is given by

10
[ ] ( ) ( )⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
+⎥⎦
⎤⎢⎣
⎡
=++=
−−
−
−−−
−
−−−
2
12
122112
2111
212
2
12
121211
211
212
212
1
2212
11
1'2'
11'2' )(
ωω
σσσ
ωωβωω
ωωαλλλλ
ωωβωεεωαλλ
tt
t
ttt
t
tttt
yyyy
www
HWH
( )( )
( )2122211221
21111
22122111
22222
222
2122211221
21111
22122111
22112
212
2122211221
21111
22122111
22111
211
()(
()(
()(
−−−−−
−−−−−
−−−−−
+++++=
+++++=
+++++=
tttttt
tttttt
tttttt
yyw
yyw
yyw
σωσωωσωβωωαλσ
σωσωωσωβωωαλλσ
σωσωωσωβωωαλσ
When there is just one factor, the number of parameters is 2
)5( +kk . The F-
GARCH model is nested within the BEKK model and, consequently, it guarantees a
positive semi-definite covariance matrix. These models allow the conditional variances
and covariances to depend on the past of all variances and covariances but they imply
common persistence in all these elements. It is important to note that these models are
not the same as the factor models with heteroscedastic disturbances; see Sentana (1998).
5.2.2 Models for conditional correlations
These models are based on the decomposition of the covariances into
correlations and standard deviations. For these models, the conditions for stationarity
and the existence of moments are not easy to obtain. However, they are easier to
estimate.
Bollerslev (1990) proposes the Constant Conditional Correlation (CCC) model
which allows each series to follow a separate GARCH model while restricting the
conditional correlations to be constant. Consequently, the conditional covariances are
proportional to the product of the corresponding conditional standard deviations. The
CCC-GARCH model is given by
ttt RDDH =
where ( )kttt diagD σσ ,...,1= and ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
1............
...1
1
1
k
k
Rρ
ρ. The elements of tD can be
defined as GARCH(1,1) models 2
1,2
1,2, −− ++= tiitiiiti y σβαωσ

11
The number of parameters is the same as in the F-GARCH model with one
factor, 2
)5( +kk . The estimation of this model is very simple and, consequently, the
CCC-GARCH model is very popular between practitioners. However, when the
constant correlation hypothesis is tested with real data, it is often concluded that it is not
an adequate assumption; see Tse (2000) and Bera and Kim (2002) for tests for constant
correlations. Consequently, Jeantheau (1998) introduced an extension of the CCC-
GARCH model that allows dynamic interactions between the conditional variance
equations. The properties of this model have been analysed by He and Teräsvirta
(2004).
Given that it seems that the conditional correlations increase during periods of
market disturbance, there are several proposals of models where the correlations have a
regime-switching structure driven by an unobserved state variable; see, for example,
Berben and Jansen (2005) and Silvennoinen and Teräsvirta (2005).
Tse and Tsui (2002) and Engle (2002) have proposed the Dynamic Conditional
Correlation (DCC) GARCH models that impose GARCH-type dynamics on the
conditional correlations as well as on the conditional variances. In both cases, the
conditional covariance matrix is given by
tttt DRDH =
Tse and Tsui (2002) propose to model tR as
11)1( −− +Ψ+−−= ttt RRR βαβα
where α and β are non-negative parameters satisfying 1<+ βα , R is a symmetric kxk
positive definite matrix with 1=iiρ and tΨ is the kxk conditional correlation matrix of
tY where the conditional correlations are computed at each time t using the M previous
observations, i.e.
∑∑
∑−
=−
−
=−
−
=−−
=Ψ1
0
21
0
2
1
0
ˆˆ
ˆˆ
M
mmjt
M
mmit
M
mmjtmit
ijt
εε
εε
A necessary condition to ensure the positivity of tΨ and, consequently, of tR is
that kM ≥ .
Alternatively, the model proposed by Engle (2002) is

12
( ) ( ) 2/12/1 )()( −−= tttt QdiagQQdiagR
where 1'
11 ˆˆ)1( −−− ++−−= tttt QQQ βεεαβα , Q is the marginal covariance matrix of
tε̂ and α and β are non-negative parameters such that 1<+ βα .
In both models, all the conditional correlations abbey the same dynamics. This is
necessary to ensure that tR is positive definite.
The number of parameters is 2
)4)(1( ++ kk and the model is relatively easy to
estimate by a consistent two-steps procedure even if the number of series in the system
is large.
The number of parameters in the DCC-GARCH model of Engle remains
relatively low because all conditional correlations are generated by GARCH models
with identical parameters.
5.2.3 An encompassing multivariate GARCH model
Kroner and Ng (1998) have proposed a general dynamic covariance model that
encompasses many multivariate GARCH models. In particular, it encompasses the DCC
model of Engle (2002) and Tse and Tsui (2002), the CCC, BEKK, DVEC and F-
GARCH models. This model is not practical from an empirical point of view as it
requires a very large number of parameters, namely, 2
4)17( +−kk . This number is
smaller than in the VEC model but larger than in the BEKK model. However, this
model can be interesting for theoretical comparisons.
5.2.4 Estimation of multivariate GARCH models
Assuming normality, the likelihood function can be written as
∑∑=
−
=
−−=T
tttt
T
ttT YHYHL
1
1'
1 21||log
21)(θ
The asymptotic properties of ML and QML estimators in multivariate GARCH
models are not yet well established. Jeantheau (1998) proves the consistency of the
Gaussian QML estimator. However, asymptotic normality has not being established in
general. Gourieroux (1997) has some results under high level conditions which are
difficult to check in practice. Comte and Lieberman (2003) has proven it for the BEKK
model.

13
Lin (1992) reviews and compares the finite sample properties of several
alternative methods to estimate F-GARCH models.
With respect to DCC models, they can be consistently estimated in two steps;
see Engle and Sheppard (2001). First, the univariate GARCH(1,1) model is estimated
for each of the series. Then, the observations are standardized using these estimates and,
in the second step, estimates of the parameters corresponding to the correlations are
estimated by minimizing
∑∑=
−
=
−−=T
tttt
T
ttT RRL
1
1'
12 ˆˆ
21||log
21)( εεθ
Brooks, Burke and Persand (2003) review the software available to estimate
multivariate GARCH models.
Model Reference
VEC Bollerslev, Engle and Wooldridge (1988),
DVEC Bollerslev, Engle and Wooldridge (1988),
F-GARCH Engle, Ng and Rothschild (1990)
CCC Bollerslev (1990)
BEKK Engle and Kroner (1995)
E-CCC Jeantheau (1998)
O-GARCH van der Weide (2002)
DCC Tse and Tsui (2002)
Engle (2002)
FF-GARCH Vrontos, Dellaportas and Politis (2003)
ST-CCC Berben and Jansen (2005)
Silvennoinen and Teräsvirta (2005)

14
5.3 Multivariate Stochastic Volatility models
Compared with the multivariate GARCH literature, the literature on multivariate
SV models is much limited; see Chib (2007) for a survey. The basic multivariate SV
models, proposed by Harvey, Ruiz and Shephard (1994), is specified as k univariate SV
models for the conditional variances
ititiit
ititiity
ησφσ
σεσ
+=
=
−2
12
*
loglog
where ( )',...,1 kttt εεε = is a white noise vector such that 0)( =tE ε and εεε Σ=)( 'ttE in
which the elements on the leading diagonal are unity and the off-diagonal elements are
ijρ . The vector of noises ( )',...,1 kttt ηηη = is multivariate normal with 0)( =tE η and
ηηη Σ=)( 'ttE . In the bivariate case,
{ }{ }2/exp
2/exp
222*2
111*1
ttt
ttt
hyhy
εσεσ
==
⎥⎦
⎤⎢⎣
⎡=Σ
11
ε
εε ρ
ρ
ttt
ttt
hhhh
21222
11111
ηφηφ+=+=
−
− ⎥⎥⎦
⎤
⎢⎢⎣
⎡=Σ 2
2
212
121
ηη
ηηη σσ
σσ
The model can be easily generalized to a VAR model. However, we focus on the
especial case when )'log,...,(log 221 kttth σσ= is a multivariate random walk. The state
space model in this case is given by
ttt
ttt
hhhYη
ξμ+=
++=
−1
*
where )log,...,(log 221
*kttt yyY = and ))(loglog),...,(log(log 1
21
21 tktttt EE ξξξξξ −−= . In
this model, common factor can be incorporated easily as follows:
ttt
ttt
hhhYη
ξθμ+=
++=
−1
*
where θ is a kxn matrix of factor loadings with n<k and th and tη are nxn vectors. In
this case, the log-volatilities are cointegrated. To identify the model, we require that
ijij >= ,0θ and that ηΣ is an identity matrix.
The basic model has also been extended by Yu and Meyer (2004) to introduce
Granger-causality
⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
−
−
t
t
t
t
t
t
hh
hh
2
1
12
11
2221
1211
2
1
ηη
φφφφ

15
In this case, the number of parameters is 2
4 2k . They also propose a model with
time-varying correlations:
)()( 2/12/1 −−=Σ tttt QdiagQQdiagε
)()( '111 SvvASQBSQ tttt −+−+= −−− oo
where ),0( INvt → and o is the Hadamard product (matrix whose elements are
obtained by element-by-element multiplication).
There are several methods implemented in the literature to estimate the
parameters of MSV models:
· QML as in Harvey, Ruiz and Shephard (1994)
· MCMC as in Chi, Nardari and Shephard (2005)
·SML as in Danielsoon (1998)
5.4 Applications
Dynamic asset pricing models:
De Santis et al. (1998)
Volatility transmission between assets and markets:
Bollerslev (1990)
Kerney and Patton (2000)
Koutmos and Booth (1995)
Future hedging
Bera et al. (1997)
Sephton (1993)
Impact of exchange rate volatility on trade and output
Value-at-Risk
References
Bauwens, L., S. Laurent and J.V.K. Rombouts (2006), Multivariate GARCH models: A survey, Journal of Applied Econometrics, 21, 79-109. Bollerslev, T. (1990), Modelling the coherence in short-run nominal exchange rates: a multivariate generalized ARCH approach, Review of Economics and Statistics, 72, 498-505.

16
Bollerslev, T., R.F. Engle and J.M. Wooldridge (1988), A capital-Asset Pricing Model with time-varying covariances, Journal of Political Economy, 96, 116-31. Brooks, C., S. Burke and G. Persand (2003), Multivariate GARCH models: software choice and estimation issues, Journal of Applied Econometrics, 18, 725-734. Brooks, C., O.T. Henry and G. Persan (2002), Optimal hedging and the value of news, Journal of Business, 75, 333-52. Chib, S. (2007), Multivariate Stochastic Volatility models, in Andersen, T.G., R.A. Davis, J.-P. Kreiss and T. Mikosch (eds.), Handbook of Financial Econometrics, Springer, New York. Chib, S., F. Nardari and N.G. Shephard (2005), Analysis of high dimensional multivariate stochastic volatility models, Journal of Econometrics, forthcoming. Christodoulakis, G. and S.E. Satchell (2002), Correlated ARCH (corr-ARCH): modelling the time-varying conditional correlation between financial asset returns, European Journal of Operational Research, 139, 351-370. Danielsson, J. (1998), Multivariate stochastic volatility models: estimation and comparison with VGARCH models, Journal of Empirical Finance, 5, 155-173. De Santis, G. and B. Gerard (1997), International Asset Pricing and Portfolio Diversification with Time-Varying Risk, The Journal of Finance, 52, 1881-1912. Engle, R.F. (2002), Dynamic conditional correlation – A simple class of multivariate GARCH models, Journal of Business and Economic Statistics, 17, 239-250. Engle, R.F. and Kroner (1995), Multivariate simultaneous GARCH, Econometric Theory, 11, 122-150. Engle, R.F., V.K. Ng and M. Rothschild (1990), Asset pricing with a factor-ARCH covariance structure, Journal of Econometrics, 45, 213-237. Harvey, A.C., E. Ruiz and N.G. Shephard (1994), Multivariate stochastic variance models, Review of Economic Studies, 61, 247-264. He, C. and T. Teräsvirta (2004), An extended constant conditional correlation GARCH model and its fourth-moment structure, Econometric Theory, 20, 904-926. Hosking (1980), JASA, 75, 602-608. Hosking (1981), JRSS, B, 43, 219-230. Jeantheau, T. (1998), Strong consistency of estimators for multivariate ARCH models, Econometric Theory, 14, 70-86.

17
Karolyi, G. (1995), A multivariate GARCH model of international transmission of stock returns and volatility: The case of the United States and Canada, Journal of Business & Economic Statistics, 13, 11-25. Kearney, C. and A. Patton (2000), Multivariate GARCH modelling of Exchange rate Volatility transmission in the European Monetary System, The Financial Review, 41, 29-48. Li and McLeod (1981) JRSS, B, 43, 231-239. Lin (1992), Alternative estimators for factor GARCH models: a Monte Carlo comparison, Journal of Applied Econometrics, 7, 259-79. Ling, S. and M. McAleer (2003), Asymptotic Theory for a vector ARMA-GARCH model, Econometric Theory, 19, 280-310. Sentana, E. (1998), The relation between conditionally heteroscedastic factor models and factor GARCH models, Econometrics Journal, 1, 1-9. Silvennoinen, A. and T. Teräsvirta (2006), Multivariate GARCH models, in Andersen, T.G., R.A. Davis, J.-P. Kreiss and T. Mikosch (eds.), Handbook of Financial Econometrics, Springer, New York. Tse, Y.K. and K.C. Tsui (2002), A Multivariate Generalized Autoregressive Conditional Heteroscedasticity model with time-varying correlations, Journal of Business and Economic Statistics, 20, 351-362. Yu, J. and R. Meyer (2004), Multivariate Stochastic Volatility models: Bayesian estimation and model comparison, manuscript.