Embed Size (px)
DESCRIPTION
Chapter 5. Digital Image Processing Fundamentals. Learning Goals. The human visual system Digitizing images Display of Images. Trading an eye for an ear. An eye is a Multi-mega pixel camera. It has a lens (adjustable zoom) It has an automatic f-stop (iris 2-8 mm) - PowerPoint PPT Presentation
Citation preview

Chapter 5
Digital Image Processing Fundamentals

Learning Goals
• The human visual system
• Digitizing images
• Display of Images

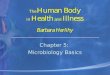
Trading an eye for an ear
opticalaxiscornea
lensopticdisk
opticnerveretina
foveacentralis
iris

An eye is a Multi-mega pixel camera
• It has a lens (adjustable zoom)
• It has an automatic f-stop (iris 2-8 mm)
• It has a sensor plane (100 million pixels)
• The sensor has a transfer function senstive to mesopic range; 380 to about 700 nm

The eyes have a USB2 data rate!
• 250,000 neurons in the optic nerve
• variable voltage output on EACH nerve
• 17.5 million neural samples per second
• 12.8 bits per sample
• 224 Mbps, per eye (a 1/2 G bps system!).
• Compression using lateral inhibition between the retinal neurons

Response curves
• Eye has Gaussian response to light.
• Gives rise to biologically motivated image processing

Quantization of an Image
• Computers use digital cameras -> quantizationSNR≤6b+ 4.8
SNR =10 log3×22 b( ) =20blog2 +10log3

Sampling an Image
f s
f (x) Anti-aliasingFilter

Sampling=convolution w pulse train
F(u) *P(u) ≡ F(γ)P(u−γ)dγ−∞
∞
∫
F(u) *P(u) = f(x) δ(x−n / fs)n=−∞
∞
∑ e−j 2πux ⎡ ⎣ ⎢
⎤ ⎦ ⎥dx
−∞
∞
∫

Quantization Error is visible

Displays
• Color Monitors are made for people

Chapter 6-7
• Opening and Saving Images

Chapter 8 Convolutionwith a kernel, g(x)
h(x) = f(x) * g(x)= f(u)g(x−u)du−∞
∞
∫
h(x) = f(x) * g(x)= f (u)g(−∞
∞
∑ x−u)

Region of Support
• The region of support is defined as that area of the .kernel which is non-zero
• linear convolution:=signal has infinite extent but kernel has finite support
• If function has finite region of support we have compact support

Real images have finite region of support
• But we treat them as periodic and infinite!
• We repeat kernels so that they have the same period as the images.
• We call this cyclic convolution.

Convolution in 2D
h(x, y) = f * g= f (u,v)g(x−u,y−v)dudv−∞
∞
∫−∞
∞
∫
h(x,y) = f * g= f(u,v)g([x−u],[y−v])v=0
vmax−1
∑u=0
umax−1
∑
[x −u] =(x−u)modumax
[y−v] =(y−v)modvmax

Avoid the Mod op
h(x,y) = f * g= f (x−u,y−v)g(u+uc ,v+vc)v=−vc
vc
∑u=−uc
uc
∑

What is wrong with avoiding the mod op?
• How do I find the center of the kernel?

Cyclic Convolution

Implementing Convolution for(int y = 0; y < height; y++) { for(int x = 0; x < width; x++) { sum = 0.0; for(int v = -vc; v <= vc; v++) for(int u = -uc; u <= uc; u++) sum += f[cx(x-u) ][cy(y-v)] * k[ u+uc][v+vc]; if (sum < 0) sum = 0; if (sum > 255) sum = 255; h[x][y] = (short)sum; } }

What happens to the image if you ignore the wrap?

Cyclic Convolution keeps the edges

Can you think of a better way to implement convolution?
• Keep the edges!
• Don’t use the mod operation.
• How about growing the image by the size of the kernel*2?

Convolution is slow, how can I speed it up?
• JAI!
• FFT!?
• Other ideas?