Embed Size (px)
Citation preview

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Chapter 4 describes five key areas
1. How we define and characterize stochastic process
2. The need and a framework for developing stochastic
linear system models
3. Forming models of linear differential or difference
equations
4. A way for describing measured systems outputs
5. Ways of building ‘practical system models’ to reflect
reality

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Agenda – Class Meeting 04
• Stochastic processes (Section 4.2) - pp. 133-139 (7p)
• Stationary stochastic processes and power-spectral density (Section 4.3) - pp.
139-145 (7p)
• System modeling (Section 4.4) - pp. 145-147 (3p)
• Frequency analysis and domain techniques - to be provided
• Response of lightly damped systems - to be provided
• Derivatives of random processes (from Bendat and Piersol handout)
In a 2nd meeting
• White Gaussian noise and Brownian motion (Section 4.5) - pp. 147-156
(10p)
• Sections 4.6, 4.7, 4.8 and 4.9
• Sections 4.10, 4.11 and 4.12

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Definitions
• Stochastic process
• Mean value function
• Covariance and cross-covariance
• Correlation and cross-correlation
• Independent and uncorrelated
• Strictly and wide-sense stationary
• Fourier transform
• Power-spectral density and cross-power
• Ergodic processes

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Stochastic process
: ( , )A tω ω ξ= ∈Ω ≤x
for any t an element of T and nR∈ξ are in the underling σ algebra.
is a stochastic process if sets of the form, ( , )⋅ ⋅x
For each point in the sample
space, there is an associated
‘sample’ stochastic process.
Discrete or continouous
1 1( , )t ωx
2 1( , )t ωx
3 1( , )t ωx
4 1( , )t ωx

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
The collection of all possible sample functions that a random
phenomenon might have produced is called a random or stochastic
process.
One sample record of data may be thought of as one physical
realization.Bendat and Piersol [3]
Maybeck [1]

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Stochastic process (cont.)
e.g., road profile

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
To characterize a CT stochastic process completely, you need to
know the joint probability distribution function or density function.
However, you’d
need 1st and 2nd order
moments, as well as
all higher order
functions for all t
values of interest.
This is not practical.
For Gaussian
processes, the first
two moments are
sufficient.

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Mean value function
The mean value function is defined for all t in T, being an average
value taken over the entire ensemble of samples from the process.
The covariance matrix gives an indication of the spread of values
from the mean at time t,
Covariance kernel – measure of how fast x(t) samples change over
time
Correlation matrix
Correlation kernel
Correlation matrix
( ) ( )x t E tm ≜ x
[ ][ ] ( ) ( ) ( ) ( ) ( )T
xx x xt E t t t t− −P m m≜ x x
[ ][ ] 1 2 1 1 2 2( , ) ( ) ( ) ( ) ( )T
xx x xt t E t t t t− −P m m≜ x x
( ) ( , )xx xx
t t tP P≜
1 2 1 2 1 2 1 2( , ) ( ) ( ) ( , ) ( ) ( )T T
xx xx x xt t E t t t t t t= +Ψ P m m≜ x x
( ) ( , ) ( ) ( )T
xx xxt t t E t t=Ψ Ψ≜ x x
Characterizing Stochastic Processes

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Cross-covariance kernel – relating two processes x(t) and y(t)
Cross-covariance matrix
Cross-correlation kernel
[ ] 1 2 1 1 2 2( , ) ( ) ( ) ( ) ( )T
xy x yt t E t t t t − − P m m≜ x y
1 2 1 2 1 2 1 2( , ) ( ) ( ) ( , ) ( ) ( )T T
xy xy x yt t E t t t t t t= +Ψ P m m≜ x y
( ) ( , )xy xy
t t tP P≜

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Independent, white, and uncorrelated processes Discussion(these notes need to be re-worked/cleaned up)

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Discussion
(these notes need to be re-worked/cleaned up)

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
A strictly stationary process is WSS iff it has finite second order
moments, and WSS does not imply SSS. A Gaussian WSS is SSS.

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
For WSS, diagonal terms of the correlation matrix are even
functions only of τ with a maximum value at τ = 0.
(add more here later)

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
For WSS processes, we can use Fourier transforms to generate
frequency domain characterizations of stochastic processes.

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Good question: what is it about stationary processes that enable
application of Fourier transforms?

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Mean-square value from PSD
2 1( ) (0) ( ) ( )
2xx xx xx
E t d f dfω ωπ
∞ ∞
−∞ −∞
= Ψ = Ψ = Ψ∫ ∫x
2(quantity)
PSD has units Hz
(0) mean-square value of ( )xx tΨ ≜ x
(a lot of practical use comes from this)

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
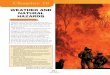
White
Exponentially
time-correlated
Random bias
From Maybeck Example 4.2

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
From Bendat and Piersol [3]

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
“A process is ergodic if any statistic calculated by averaging over all
members of the ensemble of samples at a fixed time can be
calculated equivalently by time-averaging over any single
representative member of the ensemble, except possibly a single
member out of a set of probability zero.”
No readily applied condition or test for ergodicity.
“In practice, empirical results for stationary processes are often
obtained by time-averaging of a single process sample, under the
assumption of ergodicity, such as:
[ ]
[ ]
[ ]
1( , ) lim ( , )
2
1( ) ( , ) ( , ) lim ( , ) ( , )
2
1( ) ( , ) ( , ) lim ( , ) ( , )
2
T
x iTT
T
xx i iTT
T
xy i iTT
m E t t dtT
E t t t t dtT
E t t t t dtT
ω
τ τ ω τ ω
τ τ ω τ ω
−→∞
−→∞
−→∞
= ⋅ =
Ψ ⋅ + ⋅ = +
Ψ ⋅ + ⋅ = +
∫
∫
∫
≜
≜
x x
x x x x
x y x y

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
This works by (seems obvious now):
1( ) ( )
2
Let:
1( ) ( )
2
So,
1( ) ( ) ( )
2
T R
T
T R
nn
V n t n t dtT
t
V n n dtT
V n n dt RT
τ
τ τ
ρ τ
ρ ρ τ τ
ρ ρ τ τ
∞
−∞
∞
−∞
∞
−∞
= − −
= −
= + −
= + =
∫
∫
∫

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
A random data analysis perspective [3]
Consider the mean (1st moment) of the ensemble computed at t1. This is estimated
by taking value at this time for each sample function and dividing sum by the
number of samples.
1 1
1
1( ) lim ( )
N
x kN
k
t x tN
µ→∞
=
= ∑
1 1 1 1
1
1( , ) lim ( ) ( )
N
xx k kN
k
t t x t x tN
τ τ→∞
=
Ψ + = +∑If both of these vary with time, the data is said to be
nonstationary. If these do not vary as t1 varies, the
process is said to be weakly stationary, or stationary in
the wide sense.
Weakly stationary random processes have constant mean
values and the autocorrelation function depends only on
τ. Verifying weak stationarity usually suffices for
justifying an assumption of strong stationarity (all
possible moments and joint moments are invariant).Bendat and Piersol [3]

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Refer to Bendat and Piersol, Chapter 5.
Good examples of calculating autocorrelation functions for
different types of signals.

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Example: Cross-correlation function for time-delay [3]

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Example: Cross-correlation function for time-delay [3] (cont.)

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
These notes need to be
cleaned up and
organized.

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Response of a linear system to stochastic input –
first, review frequency response analysis

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Key results for time and frequency response

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Now, calculating
some response
measures of
interest – time
domain

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Frequency domain response in terms
of PSD

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Getting the mean square response using PSD

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
These results are also used in system identification – to estimate
the system H(ω)

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
More on PSD – Another interpretation of its meaning

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
More on PSD – Another interpretation of its meaning (cont.)

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
More on PSD – Another interpretation of its meaning (cont.)

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Response of Lightly Damped Systems

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Example: response of a lifting surface

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Insert here additional examples, such as for a vehicle
traversing a terrain with stochastic elevation.

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
For the lifting surface example, the mean square value gives
you a good idea of expected RMS level, for example.
What other kind of response measures might you need if you
were assessing the design or control of this lifting surface?

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
For example, consider this problem:
From [3]

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Derivative random processes [3]
• Section 5.4 (Bendat and Piersol) – see handout
• Why would you care? Fatigue/failure, etc.
• Nice follow on to discuss how you take
derivatives, how you estimate zeros, etc.
• See Bendat and Piersol Problem 5.9 (expected
number of zero crossings)
• Also see Papoulis, Chapter 16, level-crossing
problem

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
1t
( )tξ 1( )tξ
2t
2( )tξ
2( )tx
1( )tx
( )tx
Later: add discussion on level-crossing problem

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
Problems
• 4.5 - Brownian motion and stochastic DE
• 4.9 - Modeling and variance response
• 4.10 - Response of linear system to stochastic
input - mean-square response
• 4.11 - Response of linear system to stochastic
input - autocorrelation response

ME 384Q.7 – Prof. R.G. LongoriaStochastic Systems, Estimation and Control
Department of Mechanical EngineeringThe University of Texas at Austin
References
1. P.S. Maybeck, Stochastic Models, Estimation, and Control, Vol. 1,
Academic Press, Orlando, FL, 1979.
2. A. Papoulis, Probability, random variables, and stochastic processes, 3rd
edition, McGraw-Hill, New York, 1991.
3. J.S. Bendat and A.G. Piersol, Random data: analysis and measurement
procedures, Wiley-Interscience, New York, 1986.