Embed Size (px)
DESCRIPTION
Chapter 3, Processes. 3.1 Process Concep t. The process is the unit of work in a system. Both user and system work is divided into individual jobs, or processes. - PowerPoint PPT Presentation
Citation preview
1
Chapter 3, Processes
2
3.1 Process Concept
• The process is the unit of work in a system. Both user and system work is divided into individual jobs, or processes.
• As already defined, a process is a program in execution, or a program that has been given a footprint in memory and can be scheduled to run.
3
Recall what multi-processing means
• The importance of processes may not be immediately apparent because of terminology and also because of the progress of technology.
• Keep in mind that multi-processing refers to multiple physical processors.
• Also, most recent general purpose computer chips are in fact multi-core, which means that at the physical level, they are multi-processor systems on a single chip.
4
Why processes are important
• The importance of processes stems from the fact that all modern, general purpose systems are multi-tasking.
• For the purposes of clarity, in this course the main topic is multi-tasking on a single physical processor.
• The point is this:• In a multi-tasking system, each individual task
exists as a process.
5
Defining an O/S by means of processes
• Chapter 1 concerned itself with a definition of an operating system.
• Given the fundamental nature of processes, another possible definition presents itself:
• The operating system is that collection of processes which manages and coordinates all of the process on a machine.
6
• From the point of view of making the system run, the fact that the operating system is able to manage itself is fundamental.
• From the point of view of getting any useful work done, the fact that the operating system manages user processes is fundamental.
7
Why we are considering multi-tasking on one processor rather than multi-processing• One final note on the big picture before going
on:• Managing processes requires managing
memory and secondary storage, but it will become clear soon that getting work done means scheduling processes on the CPU.
• As mentioned, we are restricting our attention to scheduling multiple processes, one after the other, on a single physical processor.
8
• In multiple core systems, to the extent possible, the problems of scheduling multiple jobs concurrently on more than one processor are handled in hardware.
• However, the operating system for such a system would have to be “multiple-core” aware.
9
• This is a way of saying that modern operating systems are more complex because they are at least in part multi-processor operating systems.
• The point is that you can’t begin to address the complexities of multi-processing until you’ve examined and come to an understanding of operating system functions in a uni-processing environment.
10
What is a Process?
• A process is a running or runnable program.• It has the six aspects listed on the next overhead.• In other words, a process is in a sense defined by
a certain set of data values, and by certain resources which have been allocated to it.
• At various times in the life of a process, the values representing these characteristics may be stored for future reference, or the process may be in active possession of them, using them.
11
1. Text section = the program code2. Program counter = instruction pointer = address
or id of the current/next instruction3. Register contents = current state of the machine4. Process stack = method parameters, return
addresses, local variables, etc.5. Data section = global variables6. Heap = dynamically allocated memory
12
The term state has two meanings
• The first meaning was given above as point 3.• Machine state = current contents of
cpu/hardware (registers…) for a given process.• Although one of the aspects of a process, do
not confuse machine state with process state.
13
Process state refers to the scheduling status of the process
• Systems may vary in the exact number and names of scheduling states.
• As presented in this course, a straightforward operating system would have the five process (scheduling) states listed on the next overhead.
14
Process scheduling states
1. New2. Running3. Waiting4. Ready5. Terminated
15
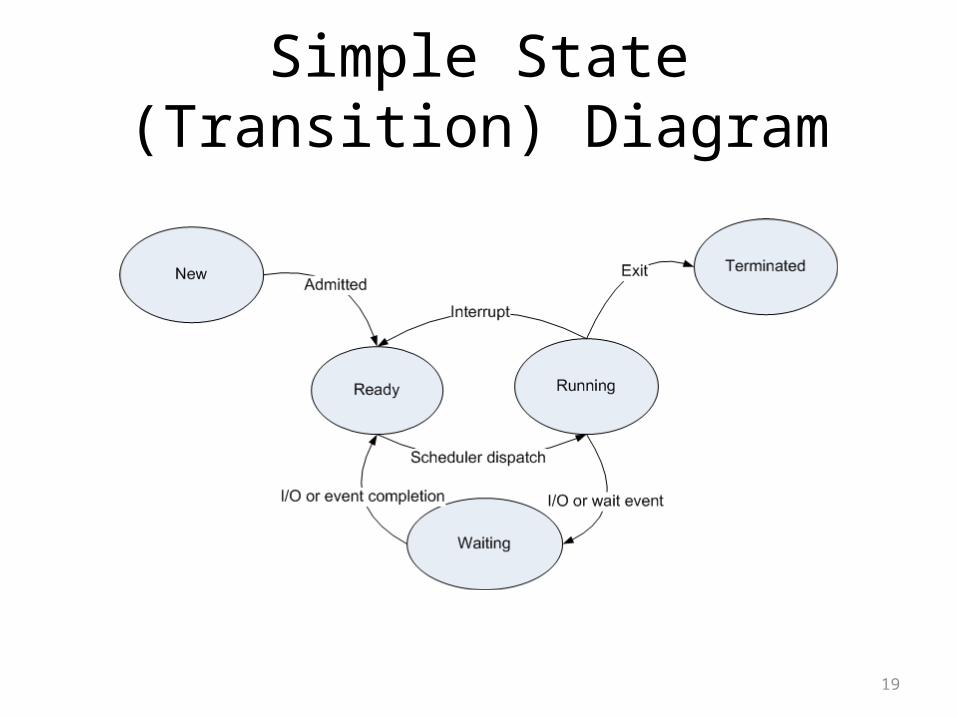
Process life cycle
• A process begins in the new state and ends in the terminated state.
• In order to get from one to the other it has to pass through other states.
• It may pass through the other states more than one time, cycling through periods when it is scheduled to run and periods when it is not running.
16
• In a classic system, there are six fundamental actions which trigger state transition, which are listed on the following overheads.
• The relationship between states and transitions is summarized in the state transition diagram which follows that list.
17
1. The operating system is responsible for bringing processes in initially.
2. It is also responsible for bringing jobs to an end, whether they completed successfully or not.
3. Interrupts can be viewed as temporarily ending the running of a given process.
18
4. Processes are scheduled to run by the operating system
5. Processes “voluntarily” relinquish the processor and wait when they issue a request for I/O from secondary storage
6. The successful completion of an I/O request makes the requesting processes eligible to run again.
19
Simple State (Transition) Diagram
20
How does the operating system keep track of processes and states?
• In a sense, what the operating system does is manage processes.
• Inside the operating system software it is necessary to maintain representations of processes.
• In other words, it’s necessary to have data structures which contain the following data:– The definition of the process—its aspects and resources– The process’s state—what state it is in, as managed by
the operating system in its scheduling role
21
What is a process control block?
• The Process Control Block (PCB) is the representation of a process in the O/S.
• In other words, it is a data structure (like an object) containing fields (instance variables) which define the process and its state.
• As will soon become apparent, PCB’s don’t exist in isolation.
• They may be stored in linked collections of PCB’s where the collection and the linking implicitly define the process’s state.
22
• The PCB contains the following 7 pieces of information.
• In effect, these 7 pieces consist of technical representations of the 6 items which define a process, plus process state.
1. Current process state = new, running, waiting, ready, terminated
2. Program counter value = current/next instruction3. CPU general purpose register contents = machine
state—saved and restored upon interrupt
23
4. CPU scheduling info = process priority and pointers to scheduling queues
5. Memory management info = values of base and limit registers
6. Accounting info = job id, user id, time limit, time used, etc.
7. I/O status info = I/O devices allocated to process, open files, etc.
24
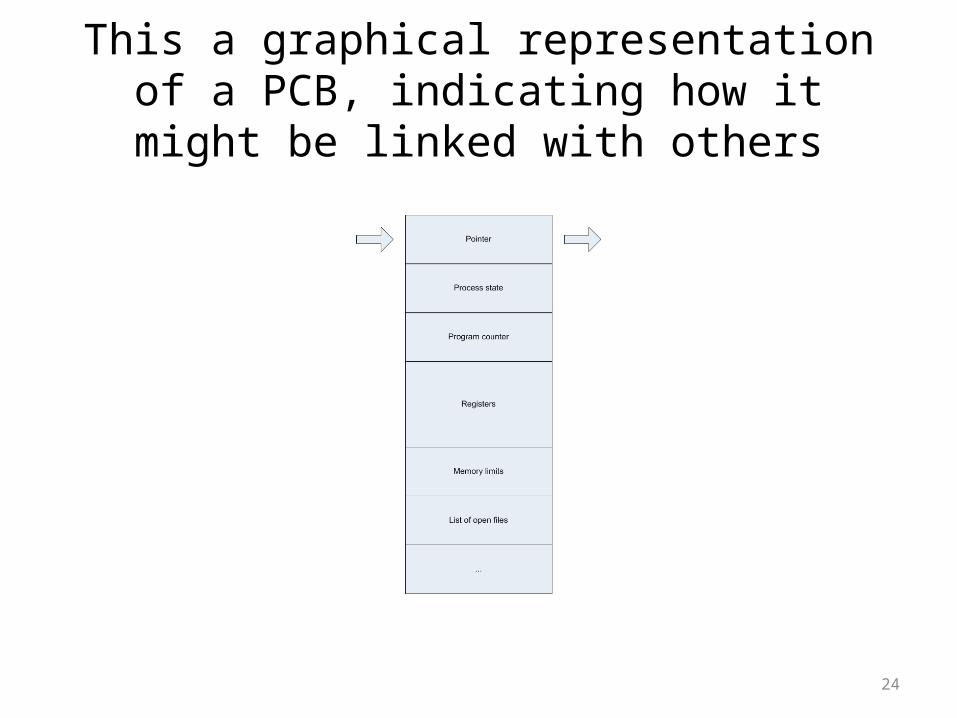
This a graphical representation of a PCB, indicating how it might be linked with others
25
Threads
• You may already have encountered the term thread in the context of Java programming.
• Threads come up in this operating systems course for two reasons:– The thread concept exists in modern operating
systems– This is an operating systems book which relies on
knowledge of Java rather than C
26
• On the one hand, this is an advantage.• Threads are a concept which is directly
accessible in Java.• On the other hand, it means that threads sort
of drop in out of the blue.• Consider this that point…
27
Processes and threads
• What has been referred to up to this point as a process can also be called a heavyweight thread.
• It is also possible to refer to lightweight threads.• Lightweight threads are what is meant when
simply using the term thread in Java.• Not all systems necessarily support lightweight
threads, but the ubiquity of Java tells you how widespread lightweight threads are in system software.
28
What is a lightweight thread?
• The term (lightweight) thread in means that >1 execution path can be started through the code of a process (heavyweight thread).
• Each lightweight thread will have its own data, but it will share the same code with other lightweight threads
29
• The origin of the terminology and its meaning can be envisioned pictorially.
• Let the picture below represent the warp (vertical threads) and woof (horizontal threads) of woven cloth.
30
• The woof corresponds to the lines of code in a program.
• The warp corresponds to the so-called “threads”, the multiple execution paths through the code
• This picture represents two activations of the same program.
31
• A concrete example: A word processor might have separate threads for character entry, spell checking, etc.
• It is not that the character entry routine/module (method) calls spell checking, for example.
• When the user opens a document, a thread becomes active for character entry.
32
• When the user selects the spell checking option in the menu, a separate thread of execution (in a different part of) the same program is started.
• These two threads can run concurrently.• They don’t run simultaneously, but the user
enters characters so slowly, that it is possible to run spell checking “at the same time”.
33
The relationship between process scheduling and thread scheduling
• In effect, threads are like processes in microcosm.
• This accounts for the lightweight/heavyweight thread terminology.
• They differ in the fact that processes run different program code while threads share program code.
34
• The operating system schedules processes so that they run concurrently.
• They do not run simultaneously.• Each process runs for a short span of time.• It then waits while another process runs for a
short span of time.• From the user’s (human speed) point of view,
multiple processes are running “at the same time”.
35
• The point is that an operating system can also support threads.
• The implementation of the JVM on a given system depends on that system’s implementation of threads.
• Within each process, threads are run concurrently, just as the processes themselves are run concurrently.
36
• To repeat, threads are processes in microcosm.
• Again, this is the one key advantage of learning operating systems from a book which uses Java instead of C.
• You can’t write operating system internals.
37
• However, you can write threaded code with a familiar programming language API, rather than having to learn an operating system API.
• All of the challenges of correct scheduling exist for Java programs, and the tools for achieving this are built into Java.
• You can learn some of the deeper aspects of actual Java programming at the same time that you learn the concepts which they are based on, which come from operating system theory.
38
3.2 Process Scheduling
• Multi-programming (= concurrent batch jobs) objective = maximum CPU utilization—have a process running at all times
• Multi-tasking (= interactive time sharing) objective = switch between jobs quickly enough to support multiple users in real time
• Process scheduler = the part of the O/S that picks the next job to run
39
• One aspect of scheduling is system driven, not policy driven: Interrupts force a change in what job is running
• Aside from handling interrupts as they occur, it is O/S policy, the scheduling algorithm, that determines what job is scheduled
• The O/S maintains data structures, including PCB’s, which define current scheduling state
• There are privileged machine instructions which the O/S can call in order to switch the context (move one job out and another one in)
40
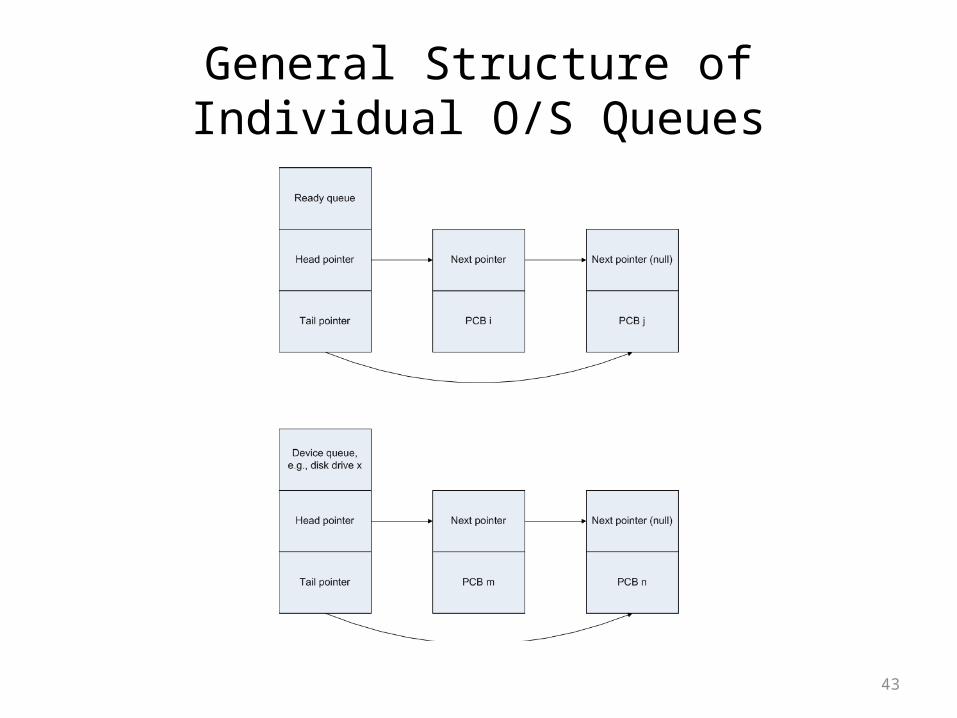
• Scheduling queues = typically some type of linked list data structure
• Job queue = all processes in the system—some may still be in secondary storage—may not have been given a memory footprint yet
• Ready queue = processes in main memory that are ready and waiting to execute (not waiting for I/O, etc.
• I/O device (wait) queues = processes either in possession of or waiting for I/O device service
41
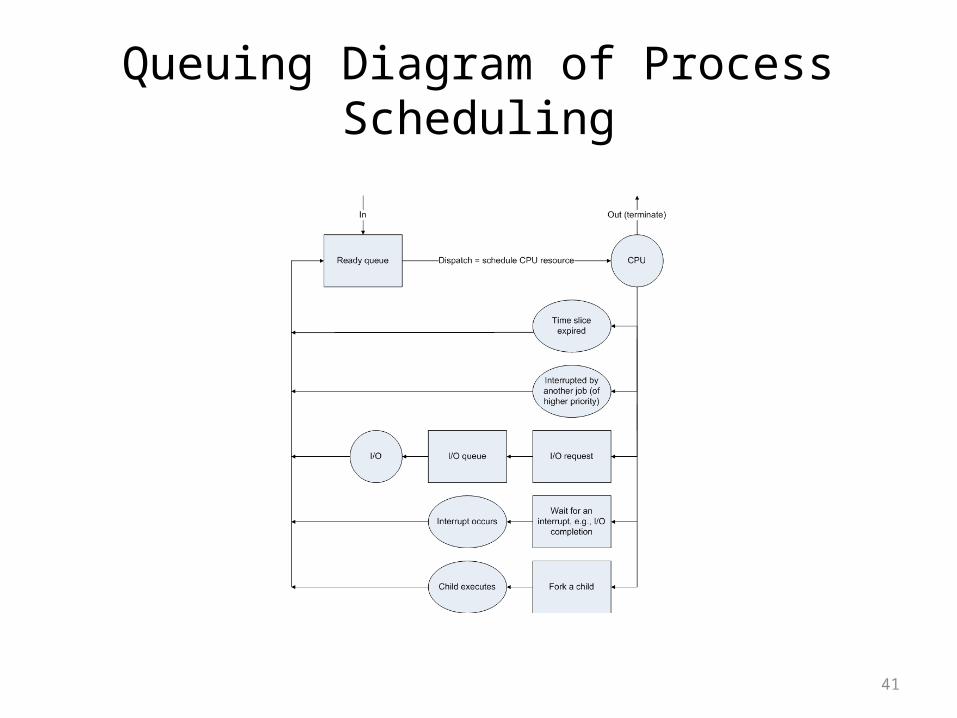
Queuing Diagram of Process Scheduling
42
Diagram key
• Rectangles represent queues• Circles represent resources• Ovals represent events external to the process• Events internal to the process which trigger a
transition are simply indicated by the queue that the process ends up in
• Upon termination the O/S removes a process’s PCB from all queues and deallocates all resources held
43
General Structure of Individual O/S Queues
44
Schedulers
• The term scheduler refers to a part of the O/S software
• In a monolithic system it may be implemented as a module or routine.
• In a non-monolithic system, a scheduler may run as a separate process.
45
Long term scheduler—this is the scheduler you usually think of second, not first, although it acts
first• Picks jobs from secondary storage to enter CPU
ready queue• Controls degree of multiprogramming (total # of
jobs in system)• Responsible for stability—number of jobs entering
should = number of jobs finishing• Responsible for job mix, CPU bound vs. I/O bound• Runs infrequently; can take some time to choose
well
46
Short term scheduler, a.k.a. the CPU scheduler, the scheduler you usually think
of first• This module implements the algorithm for
picking processes from the ready queue to give the CPU to
• This is the heart of interactive multi-tasking• This runs relatively frequently• It has to be fast so you don’t waste CPU time
on switching overhead
47
Medium term scheduler—the one you usually think of last
• Allows jobs to be swapped out to secondary storage if multi-programming level is too high
• Not all systems have to have long or medium term schedulers
• Simple Unix just had a short term scheduler. • The multi-programming level was determined
by the number of attached terminals
48
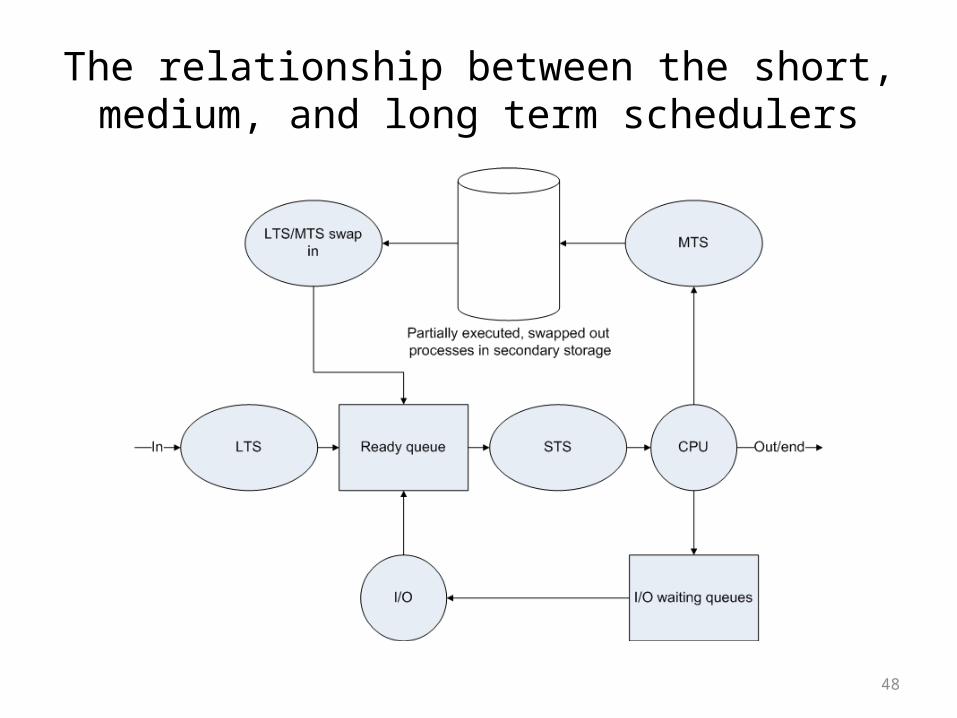
The relationship between the short, medium, and long term schedulers
49
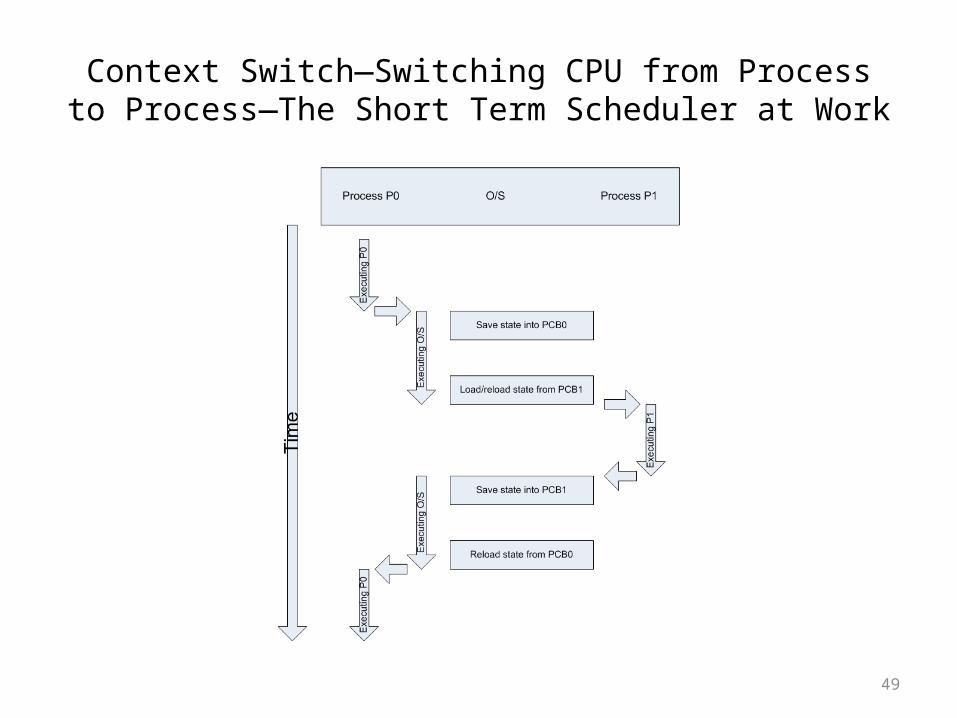
Context Switch—Switching CPU from Process to Process—The Short Term Scheduler at Work
50
Context Switching is the Heart of Short Term Scheduling
• Context switching has to be fast. • It is pure overhead cost• In simple terms, it is supported by machine
instructions which load and save all register values for a process at one time
• It frequently has hardware support—such as multiple physical registers on the chip, so that a context switch means switching between register sets, not reading and writing memory
51
3.3 Operations on Processes
• Process creation• General model: A given process, a parent, can
spawn a child process by means of a system call.• This leads to a tree of related processes.• Since the operating system has the ability to
create processes, it could in theory spawn children of processes externally as needed, without a request from the parent.
52
Resource allocation among parent and child processes
• The O/S may allocate children their own resources (memory, etc.)
• The parent may partition its resources among its children
• The parent may share its resources with its children
• Parents may give other things to their children• As one example, they can pass parameters for
open files
53
• Two execution models for parents and children– The parent executes concurrently with its children– The parent waits for some or all of its children to
terminate before resuming
54
• Two address space models– The child is a duplicate of the parent. It has the
same program and data– The child process has a new program loaded into
it
55
• The following 11 points outline an example of C code in Unix in which a parent process spawns a child
1. In Unix, processes are identified by integer pid’s.2. A system call to the Unix fork() command from
within a parent process creates a child process.3. The child is a copy of the parent process.4. The fork() call returns a pid.5. Because the child is a copy of the parent, the code
for both processes contains the call to fork().
56
6. Execution of the parent resumes at the return of this call.7. Execution of the child begins at the return of this call.8. The fork() call returns a pid.9. The child receives 0; the parent receives the pid of the child.10 This is not cosmically important, but it’s worth noting that
unlike in object orientation, the parent knows the child and not vice-versa; the child only knows that it’s a child.
11. The code contains an if statement based on the returned pid so both the parent and child know who they are and can take different execution paths.
57
• C and Unix example continued– In Unix it’s possible to issue an exec() type system
call which has the effect of wiping out the current program and replacing it with another
– It’s also possible for the parent process to issue a wait() command which has the effect of suspending execution until the most recently spawned child completes
– Note that the return value of a wait() call is the pid of the exiting child
58
• C and Unix example, preview of code specifics– The execlp() call takes three parameters, a path, a
command, and a third parameter which can be NULL
– The wait() command takes a parameter which can be NULL
59
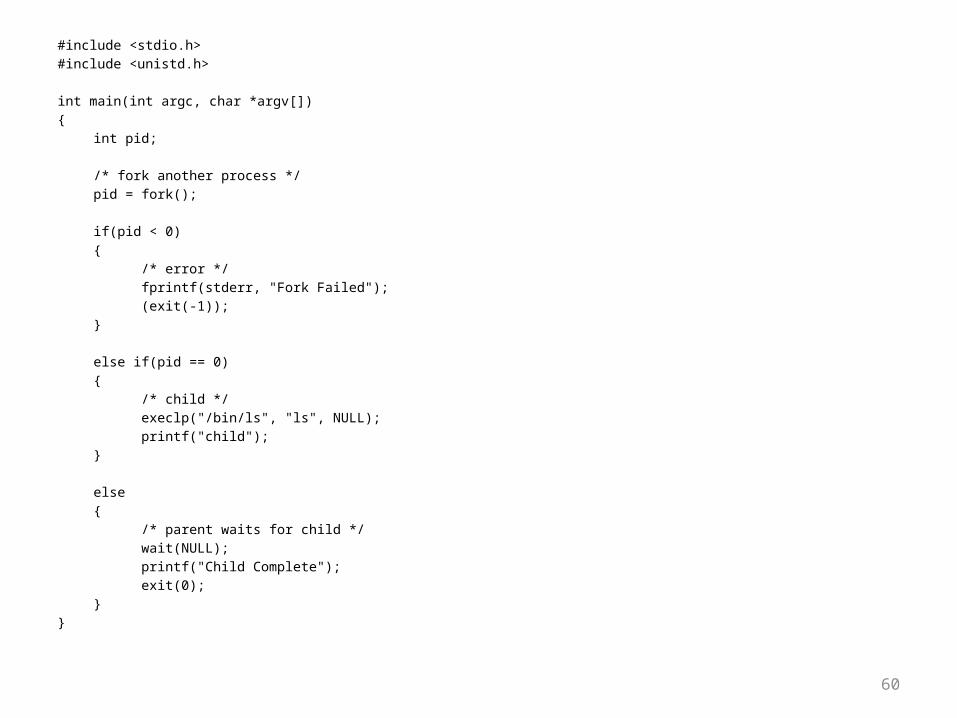
• See code on next overhead. – It is a more or less faithful copy of the book's C
program illustrating the forking of children in Unix.
– It compiles (with warnings about the use of the exit() call) and runs on the department's Unix machine, math.uaa.alaska.edu
60
#include <stdio.h>#include <unistd.h>
int main(int argc, char *argv[]){
int pid;
/* fork another process */pid = fork();
if(pid < 0){
/* error */fprintf(stderr, "Fork Failed");(exit(-1));
}
else if(pid == 0){
/* child */execlp("/bin/ls", "ls", NULL);printf("child");
}
else{
/* parent waits for child */wait(NULL);printf("Child Complete");exit(0);
}}
61
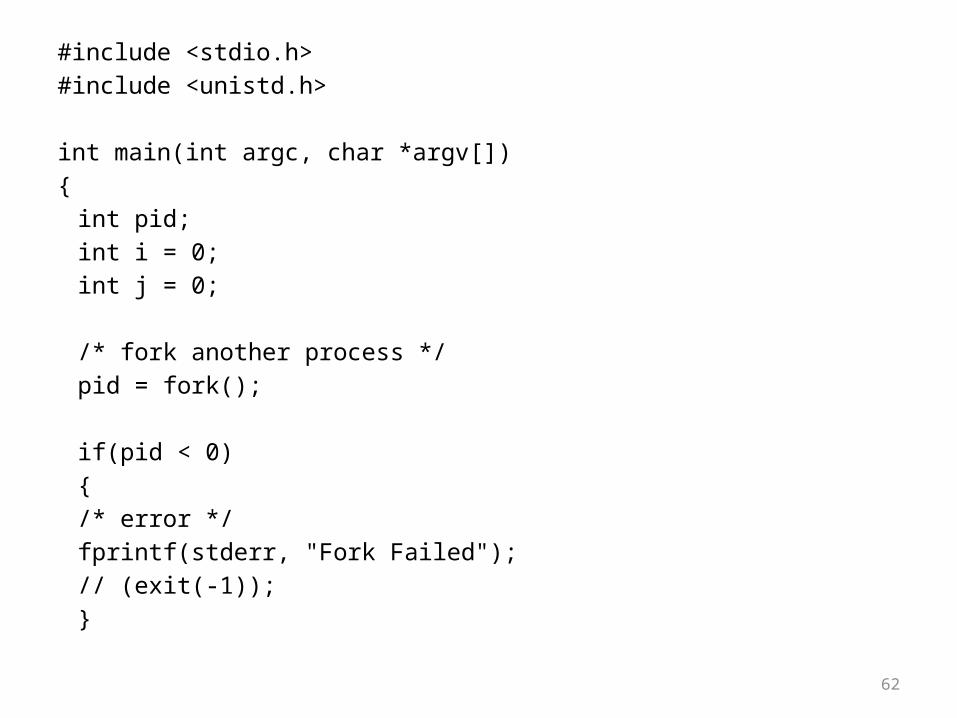
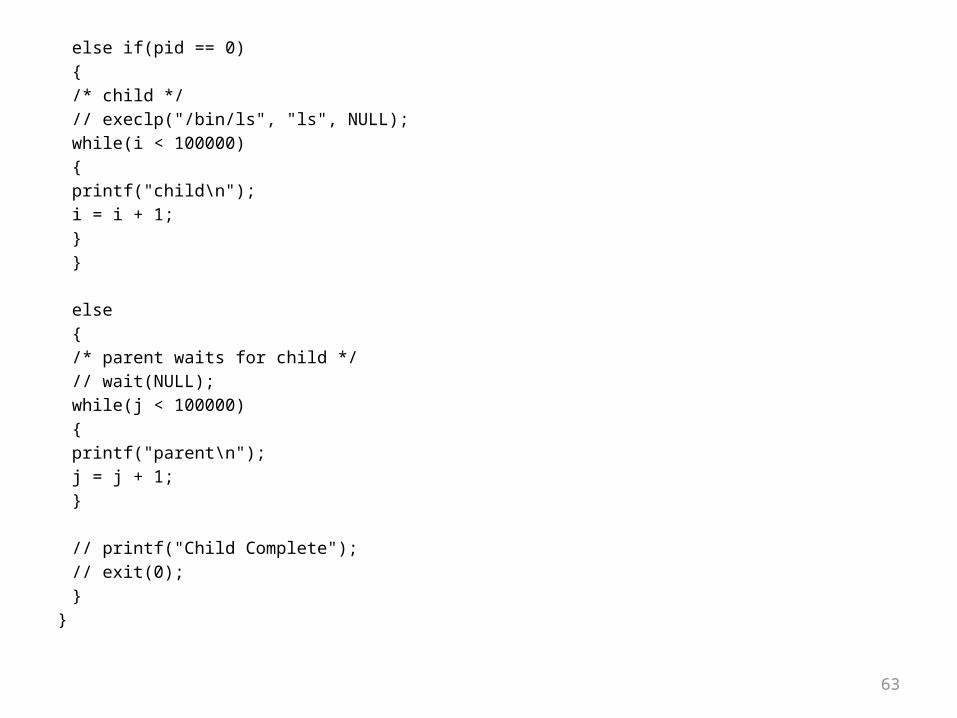
• The program given on the following overheads is a modification of the first– In it the parent doesn’t wait for the child to
complete– The parent and the child process both contain
loops– This makes it possible to see the switching back
and forth between concurrent processes under multitasking
62
#include <stdio.h>#include <unistd.h>
int main(int argc, char *argv[]){
int pid;int i = 0;int j = 0;
/* fork another process */pid = fork();
if(pid < 0){/* error */fprintf(stderr, "Fork Failed");// (exit(-1));}
63
else if(pid == 0){/* child */// execlp("/bin/ls", "ls", NULL);while(i < 100000){printf("child\n");i = i + 1;}}
else{/* parent waits for child */// wait(NULL);while(j < 100000){printf("parent\n");j = j + 1;}
// printf("Child Complete");// exit(0);}
}
64
Explicit process termination (self-termination)
• Explicit termination comes from an exit() call in a process
• An exit() call in a child can be set up to return a signal to a parent that called wait()
• This return value can signal successful termination, error termination, etc.
• The vanilla option is to return the child’s pid• All resources are deallocated at termination:
memory, open files, buffers, etc.
65
Process abortion (unwilling termination)
• Parent processes can abort children• This is why it’s useful to have the child pid
returned to the parent by the fork() call• Looking up the Unix command kill() in the
online documentation would be an entry point into this topic
66
Reasons for abortion
• The child’s task is no longer needed• The child has exceeded some resource (kill the
teenagers)• The parent is exiting.• In some systems, the child can’t exist without
the parent (Ur of the Chaldees)
67
• In Unix, children can continue to exist after their parent is gone
• In this case, the child is given the sys init process as its parent
68
3.4 Inter-process Communication
• Recall that the three elements of a micro-kernel are memory management, process scheduling, and inter-process communication.
• The previous section covered the creation of processes—not their scheduling, and this section provides an overview of inter-process communication as an aspect of what processes are and how they may interact with each other.
69
Independent processes
• Independent processes are the simpler case• They in no way affect each other• They do not share any data, either temporary
or persistent• In effect, these are processes that do not
communication with each other
70
Cooperating processes
• Cooperating processes are the more interesting case.
• They affect each other• They may pass information back and forth• They may share a common message space• In theory it may be possible to get more useful
work done if multiple independent processes are working cooperatively with each other.
71
Why support process cooperation?
• This allows >1 process to share a resource• This supports divide and conquer problem
solutions—multi-tasking >1 process working on different parts of the same problem
• This leads to modularity in the design of problem solutions
• This can lead to performance/user convenience benefits
72
Producers and consumers—an introduction to inter-process communication
• Cooperation between processes some method of communication
• The example to be given is known as a producer-consumer example
• One process passes items to another through a shared buffer
73
Synchronization
• Threaded code was mentioned earlier• It is a topic where concurrency control becomes
important to a correct implementation• In that context, you can think of the code as a
shared resource—and the need is for correct control of access to the shared code by different execution threads.
• Concurrency control is also referred to as synchronization.
74
Shared buffers for IPC
• Done correctly, inter-process communication also requires synchronization
• In this context, different processes have access to a shared buffer
• They can both read from and write to the buffer concurrently.
• The buffer is the shared resource, • In this context, the buffer is a shared resource—and
the need is for correct control of access to the shared buffer by different processes.
75
• How to correctly do synchronization for both threads and shared buffers will be discussed later.
• The following illustrations simply give an introductory explanation of what is involved with shared buffers.
76
Simple aspects of synchronization based on buffer parameters
• Unbounded buffer– The producer doesn’t have to wait to enter an
item– The consumer may have to wait for an item to
appear• From the point of view of synchronization, the
question is, how do you enforce waiting on different processes?
77
• Bounded buffer– The producer may have to wait to enter an item– The consumer may have to wait for an item to
appear• Once again, the question is, how do you
enforce waiting?• The only difference in this scenario is who
waits under what condition.
78
Implementation of shared buffers
• At the system level, an operating system may implement shared buffers as shared memory.
• The O/S is responsible for memory management, namely keeping the allocation of memory separate for different processes.
• An additional layer of complexity in the O/S would allow for >1 process to have access to the same memory.
79
• Depending on the structure of the programming language, this can also be done in application code
• The example to come does this with a shared reference to a common buffer object
• Note that, strictly speaking, since it will be illustrated with Java, it is not shared memory access
• But it is a faithful scenario of shared access in a high level language that is accessible to a non-system programmer
80
• Remember that in order to be functional, the code would require synchronization
• Although written as Java code, the example is incomplete because it doesn’t have synchronization
• The whole example of shared access will be reviewed again later when the topic at hand is synchronization.
81
• /**• * An interface for buffers• *• */
• public interface Buffer• {• /**• * insert an item into the Buffer.• * Note this may be either a blocking• * or non-blocking operation.• */• public abstract void insert(Object item);
• /**• * remove an item from the Buffer.• * Note this may be either a blocking• * or non-blocking operation.• */• public abstract Object remove();• }
82
• /**• * This program implements the bounded buffer using shared memory.• * Note that this solutions is NOT thread-safe. It will be used• * to illustrate thread safety using Java synchronization in Chapter 7.• */
• public class BoundedBuffer implements Buffer• { • private static final int BUFFER_SIZE = 3;
• /**• * volatile does not appear in the printed text. A discussion of• * volatile is in chapter 7.• */• private volatile int count;
• private int in; // points to the next free position in the buffer• private int out; // points to the next full position in the buffer• private Object[] buffer;• • public BoundedBuffer()• {• // buffer is initially empty• count = 0;• in = 0;• out = 0;• • buffer = new Object[BUFFER_SIZE];• }
83
• // producer calls this method• public void insert(Object item) {• while (count == BUFFER_SIZE) • ; // do nothing• • // add an item to the buffer• ++count;• buffer[in] = item;• in = (in + 1) % BUFFER_SIZE;
• if (count == BUFFER_SIZE)• System.out.println("Producer Entered " + item + " Buffer FULL");• else• System.out.println("Producer Entered " + item + " Buffer Size = " + count);• }• • // consumer calls this method• public Object remove() {• Object item;• • while (count == 0) • ; // do nothing• • // remove an item from the buffer• --count;• item = buffer[out];• out = (out + 1) % BUFFER_SIZE;
• if (count == 0)• System.out.println("Consumer Consumed " + item + " Buffer EMPTY");• else• System.out.println("Consumer Consumed " + item + " Buffer Size = " + count);• • return item;• }
• }
84
Message passing is an alternative IPC implementation choice
• Message-passing systems• An O/S may support IPC without shared access to
a common memory, buffer• That means that the O/S implements send() and
receive() type system calls• Fixed or variable length messages may be allowed• You may recall that in various places, message
passing was used more or less synonymously with inter-process communication
85
• In the following presentation you will find that most of the different theoretical possibilities are covered by bulleted lists about message passing.
• In the end, message passing may involve a mailbox construct, and in this way it may essentially subsume the shared memory resource idea.
• The mailbox, although typically managed by name rather than memory address, is the shared location where messages are passed.
86
• Message passing functionality is based on a “communication link” abstraction
• The abstraction includes these aspects– Direct or indirect communication– Synchronous or asynchronous communication– Automatic or explicit buffering
• Each of the sub-points above will be addressed in the following sections
87
Direct or indirect communication
• The concept of naming is the basis for either direct or indirect communication
• Either processes are known by name or id or they are not
• In direct communication, names are used
88
Direct communication
• Symmetric addressing: both the sender and receiver know the other’s name
• Form of calls for sender Q and receiver P• Q issues: send(P, msg)• P issues: receive(Q, msg)
89
Properties of symmetric, direct communication
• Each member of a pair of processes needs to know the other’s name
• Each communication link connects only two processes
• Each pair of processes has only one link between them
90
• Asymmetric addressing: It’s possible for just the recipient to be named
• Form of calls for receiver P• Sender issues: send(P, msg)• P issues: receive(sendername, msg)• When a process issues a receive() call, the system
supplies the name of the sending process• The disadvantage of direct communication: If the
names/id’s of P and Q are hardcoded, any changes in name will require changes in code
91
Indirect communication
• Fundamental construct: a uniquely named mailbox or port
• Form of calls for mailbox A• Sender issues: send(A, msg)• Receiver issues: receive(A, msg)
92
• Communication link properties under this scheme– A link is established by a shared mailbox– Each mailbox may be available for >2 processes– Each pair of processes may share >2 mailboxes
93
• Consider the following scenario– P1 sends a msg to mailbox a – P2 and P3 both call receive()
• Design choices– Restrict each mailbox to 2 processes– Allow only one process at a time to execute
receive() (synchronization)– Implement an algorithm for choosing between P2
and P3 to receive
94
Ownership issues
• A mailbox can be owned by the O/S• Then the O/S has to support mailbox creation
and deletion and send() and receive() calls
95
• The system can support the creation of mailboxes owned by a process
• If a process owns a mailbox, the process receives through that mailbox
• Other processes can only send to that mailbox• This supports a many-to-one communication
link
96
Implementation issues
• A mailbox is essentially a form of shared memory• Whether created by O/S or user process, the
mailbox initially is accessible only to the creator• Giving access to other processes is based on
system calls• I.e., if the system is the creator, it grants access• If a user process is the creator, it can only grant
access by requesting the system to do so
97
Synchronous or asynchronous communication
• Although ultimately related to the underlying problem of concurrency control, first consider the problem of synchronizing communication generically
• Do not worry for the moment about what “correct” synchronization would be in the technical sense
• Synchronization of communicating processes can be described by whether send() or receive() are blocking or non-blocking operations
98
Blocking and non-blocking send
• Blocking send: the sender is blocked until the current message is received from the mailbox
• Non-blocking send: the sender is not blocked. (I.e., the capacity of the mailbox is >1.)
99
Blocking and non-blocking receive
• Blocking receive: A process that issues a receive() waits until a message becomes available for it to receive
• Non-blocking receive: When there is no message in the mailbox a receive() call returns null.
100
• An implementation may mix and match blocking and non-blocking send() and receive()
• If both send and receive block, this gives a recognizable, named case, a rendezvous
• Neither sender nor receiver can proceed further until a message is successfully passed between them.
101
Message passing and queues
• In direct communication, the O/S internally manages a temporary queue of messages
• In indirect communication, the mailbox is a queue-like structure
102
• There are 3 implementation options that affect whether a message passing protocol is blocking or non-blocking
1. Zero capacity queue (a.k.a., no buffering): – The sender has to block until a receiver has
issued a receive()
103
2. Bounded capacity queue: – If the queue is full, the sender has to block until a
message has been received3. Unbounded capacity queue: – The sender never blocks
104
• At the beginning of the subsection the book says it will cover automatic and explicit buffering.
• The reality is that in the body of the subsection it covers no buffering and automatic buffering.
• A zero capacity queue is the no buffering case.• The other implementation options imply some
form of automatic buffering.
105
The producer-consumer example
• Like the previous example, this is given in Java code, but the code shown here is not actually complete
• In order for it to work there would have to be two threads of execution, one a sender and one a receiver
• These two threads would both have access to the mailbox, or message queue
• The syntax for threads will be explained later• In order to be correct, the code with threads would
have to be synchronized
106
• The example illustrates– An unbounded queue (since the Vector class
supports adding an arbitrary number of elements)– Non-blocking send and receive
107
• /**• * An interface for a message passing scheme.• */
• public interface Channel• {• /**• * Send a message to the channel.• * It is possible that this method may or may not
block.• */• public abstract void send(Object message);• • /**• * Receive a message from the channel• * It is possible that this method may or may not
block.• */• public abstract Object receive();• }
108
• /**• * This program implements the bounded buffer using message passing.• * Note that this solutions is NOT thread-safe. A thread safe solution• * can be developed using Java synchronization which is discussed in Chapter 6.• */
• import java.util.Vector;• • public class MessageQueue implements Channel• {• private Vector queue;
• public MessageQueue() {• queue = new Vector();• }• • /*• * This implements a non-blocking send• */• public void send(Object item) {• queue.addElement(item);• }• • /*• * This implements a non-blocking receive• */• • public Object receive() {• if (queue.size() == 0)• return null;• else • return queue.remove(0);• }• }
109
• /**• * This is the producer thread for the bounded buffer problem.• */
• import java.util.*;
• class Producer implements Runnable• {• public Producer(Channel m)• {• mbox = m;• } • • public void run()• {• Date message;• • while (true) { • SleepUtilities.nap(); • message = new Date(); • System.out.println("Producer produced " + message);• // produce an item & enter it into the buffer• mbox.send(message);• }• }• • private Channel mbox;• }
110
• /**• * This is the consumer thread for the bounded buffer problem.• */
• import java.util.*;
• class Consumer implements Runnable• {• public Consumer(Channel m) { • mbox = m;• }• • public void run() {• Date message;• • while (true)• {• SleepUtilities.nap();
• // consume an item from the buffer• System.out.println("Consumer wants to consume.");• message = (Date)mbox.receive();• if (message != null)• System.out.println("Consumer consumed " + message);• }• }• • private Channel mbox;• }
111
3.5 Examples of IPC Systems
• Skip
112
3.6 Communication in Client-Server Systems
• Skip
113
3.7 Summary
• …
114
The End