Embed Size (px)
DESCRIPTION
Chapter 3 HCS12 Members and Hardware and Software Development Tools. The HCS12 Members (1 of 2). Is a redesign of the 68HC12 family The 68HC12 family is an upgrade of the popular 68HC11 8-bit microcontroller family. The 68HC12 has a highest bus clock frequency of 8 MHz. - PowerPoint PPT Presentation
Citation preview

Chapter 3
HCS12 Members and Hardware and Software Development Tools

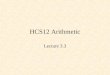
MC
status of product:MC = fully qualifiedXC = partial qualifiedPC = product engineeringKMC = sample packKXC = sample pack
9
memory type9 = flash
S12
coretype
Dx
family
256
approximatememory
B
flashrev.
xx
temperature rangeC = -40oC to 85oCV = -40oC to105oCM = -40oC to125oC
x
packagingdesignator
Figure 3.1 Motorola product numbering system for the HCS12
The HCS12 Members (1 of 2)
• Is a redesign of the 68HC12 family• The 68HC12 family is an upgrade of the popular 68HC11 8-bit
microcontroller family.• The 68HC12 has a highest bus clock frequency of 8 MHz.• The HCS12 family has a highest bus clock frequency of 32 MHz.• The numbering system is shown in Figure 3.1.

-
• The HCS12 was initially designed for automotive and process control market.
• The HCS12 has many features designed for these target markets:– Parallel ports– Timer functions: input capture, output compare, pulse accumulation, real-
time interrupt, pulse width modulation, modulus down counter– Serial communication interface (SCI)– Serial peripheral interface (SPI)– Inter-integrated circuit (I2C)– Byte data link control (BDLC)– Controller Area Network (CAN)
• Freescale also included the background debug mode (BDM) in each HCS12 member to facilitate the software debugging activities.
• Freescale also include special features to target other applications:– Ethernet controller: the MC9S12NE64 has an Ethernet controller to facilitate
the access of the Internet.– USB controller: the MC9S12UF32 has an on-chip USB controller to facilitate
the interfacing with USB bus.
The HCS12 Members (2 of 2)

Development Tools
• Software development tools– Text editor, terminal program, cross assembler,
cross compiler, simulator, source-level debugger, integrated development environment (IDE)
• Hardware development tools– Oscilloscope, function generator, in-circuit
emulator, logic analyzer, demo board• Only demo boards and BDM kit will be discussed.

Software Development Tools• A text editor allows the user to enter and edit the program.• A cross assembler allows the user to assemble their assembly
programs.• A cross compiler allows the user to compile their programs written in
high-level languages.• A simulator allows the user to run the application program without
having the actual hardware.• A terminal program allows the PC to communicate with the hardware
demo board.• A source-level debugger allows the user to set breakpoints in the
program, trace program execution, watch program variable values after program execution, and so on.
• An IDE combines all of the above programs in one package so the user can perform all software debugging activities in one environment without quitting any program.
– The freeware miniIDE and asmIDE are recommended for assembly program development.
– The freeware EmbeddedGNU IDE and GNU C compiler are recommended for C program development.

Demo Boards• Many HCS12-based demo boards are available for learning the
HCS12 and debugging the HCS12 application programs.• A demo board has an HCS12 MCU and many peripheral chips
to help test the HCS12 programs. • A demo board often has an on-board monitor program to
communicate with a PC or workstation on which the user develops the application program.
• The monitor program allows the user to display register and memory location contents, setting register and memory location contents, setting program breakpoints, tracing instruction execution, and download programs onto the demo board for execution.
• The PC or workstation communicates with the demo board using the terminal program.
• The SSE256 from Shuan Shizu and the Dragon12 from Wytec are recommended for learning the HCS12 microcontroller.

The Dragon12 Demo Board (1 of 2)
• 24-MHz bus speed (generated from a 4-MHz crystal)
• D-Bug12 monitor• 16 x 2 LCD kit (4-bit interface)• Eight LEDs• Four seven-segment displays• Keypad connector• Four buttons for input• DIP switches for input• Buzzer for playing siren and
songs (wired to the PT5 pin)• Potentiometer for testing A/D
function (wired to PAD7 pin)
• Infrared transceiver• CAN transceiver (Philips
PCA82C250)• A small breadboard• BDM IN and BDM OUT
connectors• Two RS232 connectors• LTC1661 10-bit D/A converter
chip with SPI interface• 24LC16 serial EEPROM with
I2C interface• Additional information is
available at www.evbplus.com

The Dragon12 Demo Board (2 of 2)

The SSE256 Demo Board (1 of 2)
• 24-MHz bus speed (generated from a 16-MHz oscillator)
• D-Bug12 monitor• 20 x 2 LCD kit (8-bit interface)• Eight LEDs• Four seven-segment displays• Function generator with square
waveform output, 24 frequency outputs ranging from 1 Hz up to 16 MHz (half of the them are in power of 2)
• DIP switches for data input• Keypad connector• Four debounced switches for input
with interrupt capability• DS1307 real-time clock chip with
I2C interface
• 24LC08 serial EEPROM with I2C interface
• TC72 digital thermometer with SPI interface
• TLV5616 12-bit D/A converter with SPI interface
• Buzzer for playing siren and songs (can be driven by any output input)
• Potentiometer for testing A/D function (wired to the PAD7 pin)
• CAN transceiver (MCP2551)• BDM IN and BDM OUT connectors• Two RS232 connectors• Additional information available at
www.evb.com.tw

The SSE256 Demo Board (2 of 2)

Table 3.1 D-Bug12 operating modes
PAD1 PAD0 Operating mode
0011
0101
D-Bug12; EVBJump to internal EEPROM
D-Bug12; PODSerialBootloader
The D-Bug12 Monitor• Supports most HCS12 devices with 128KB
and 256 KB flash memory• Used in many demo boards• Requires a host terminal program that
supports the Xon/Xoff software handshake for proper operation
• The HyperTerminal bundled with Windows and the terminal program bundled with asmIDE, miniIDE, and EmbeddedGNU IDE can work with D-Bug12 monitor.
• Supports four operating modes: EVB mode, Jump to EEPROM mode, POD mode, and Serial Bootloader mode
• After reset, the D-Bug12 reads the logic levels on the PAD1 and PAD0 pins to decide which of the four D-Bug12 modes to enter.

targetsystem
low-levelinterfaceroutines
D-Bug12
HCS12 demo board
PC runninga terminalprogram
User
Figure 3.4 EVB model conceptual modelWhen the demo board is powered up and the baud rate is set properly, the message as shown to the right will appear on the terminal screen.
D-Bug12 4.0.0b24Copyright 1996 - 2002 Motorola SemiconductorFor Commands type "Help"
>
Figure 3.5 D-Bug12 EVB mode sign on message
EVB Mode• The D-Bug12 monitor operates from the flash memory• The users are restricted to use SRAM (from $1000 to $3BFF) or
EEPROM to run application programs.• The user runs a terminal program on the PC to communicate with the
D-Bug12 monitor on the demo board.• EVB operation model is shown below.

• The D-Bug12 monitor displays the “>” character to indicate it is ready for operation.• When a command issued to D-Bug12 is successfully executed, the monitor displays the execution result and a new > character on a new line.• If a command is not successfully executed, press the reset button to get out.• An alternative to get out of the unsuccessful command is to press the abort key.• The abort key is connected to the XIRQ signal. • Both the SSE256 and Dragon12 demo boards use the MC9S12DP256 as their MCU.• The memory maps for these two demo boards are shown below.
Table 3.2 D-Bug12 memory map for HCS12Dx256
Address range Description
$0000-$03FF$0400-$0FFF$1000-$3BFF$3C00-$3FFF$4000-$EE7F$EE80-$EEBF$EEC0-$EEFF$EF00-$EF8B$EF8C-$EFFF$F000-$FFFF
I/ O registerson-chip EEPROMon-chip SRAM (available to user)on-chip SRAM (D-Bug12)D-Bug12 codeUser accessable function tableCustomization dataD-Bug12 startup codeSecondary reset/ interrupt tableBootloader

Using the MiniIDE (1 of 18) • Step 1. Invoke the MiniIDE by double clicking the icon of MiniIDE.
• Step 2. Communicating with the demo board– Press the Terminal menu (shown in Figure C.2) and select Show Terminal
Window.– Press the reset button on the demo board and the screen will change to
Figure C.3.

Using the MiniIDE (2 of 18)

Using the MiniIDE (3 of 18)

• Step 3. Setting options- Set Options can be found under the Build menu and Terminal menu.
Using the MiniIDE (4 of 18)

Using the MiniIDE (5 of 18)

Using the MiniIDE (6 of 18)
• Options in General category

Using the MiniIDE (7 of 18)
• Options in Terminal category

Using the MiniIDE (8 of 18)
• Options in Tool category

Using the MiniIDE (9 of 18)
• Options in Assembler category

Using the MiniIDE (10 of 18)
• Step 4. Open a new file for entering an assembler program.– Press the File menu and
select New and the screen is changed to Figure C.10.
– Enter the program as shown in Figure C.11.
– Save the file after the whole program is entered. Press the File menu and select Save as shown.

Using the MiniIDE (11 of 18)

Using the MiniIDE (12 of 18)

Using the MiniIDE (13 of 18)
• Step 5. Assemble the program. – Press the Build menu and select Build siren.asm as shown.
– After a successful assembly, the status window will display the corresponding message as shown.

Using the MiniIDE (14 of 18)

Using the MiniIDE (15 of 18)
• Step 6. Download the program onto the demo board.
– Type the load command followed by the enter key in the terminal window.
– Press the Terminal menu and select Download File (shown in Figure C.15).
– A dialog box as shown in Figure C.16 appears.
– Enter the name of the file to be downloaded and click on Open.
– After a successful download, the screen is changed to Figure C.17.

Using the MiniIDE (16 of 18)

Using the MiniIDE (17 of 18)

Using the MiniIDE (18 of 18)
• Step 7. Running and debugging the program– Type g 2000 followed by enter key. – This program will generate a two-tone siren.

Using the D-Bug12 Commands
- BF <StartAddress> <EndAddress> [<Data>]•Fill a block of memory locations with the value of <Data>.
•To fill the memory locations from $1000 to $1FFF with 0, enter the following command:
>bf 1000 1FFF 0
- MD <StartAddress> [< EndAddress >] • Display memory contents from < StartAddress > to < EndAddress >.• 16 bytes are displayed on each line.
• The <StartAddress> is rounded down to the next lower multiple of 16.• The <EndAddress> is rounded up to the next higher multiple of 16.• Only one line is displayed if the EndAddress is not specified.

>md 10001000 AA 85 06 0C - D7 98 9A 61 - DF BE BC E9 - 03 AE D0 3D .......a.......=>md 1005 10201000 AA 85 06 0C - D7 98 9A 61 - DF BE BC E9 - 03 AE D0 3D .......a.......=1010 75 DA DF 39 - 3F 34 BD A9 - 2A CA FA DB - AC DA 18 97 u..9?4..*.......1020 4D 5B 48 BA - B2 F7 B6 1B - 92 99 E5 E4 - A5 E9 01 9F M[H.............>
MDW <StartAddress> [<EndAddress>]
>mdw 1000
1000 AA85 060C - D798 9A61 - DFBE BCE9 - 03AE D03D .......a.......=>mdw 1000 1020
1000 AA85 060C - D798 9A61 - DFBE BCE9 - 03AE D03D .......a.......=1010 75DA DF39 - 3F34 BDA9 - 2ACA FADB - ACDA 1897 u..9?4..*.......1020 4D5B 48BA - B2F7 B61B - 9299 E5E4 - A5E9 019F M[H.............>

MM <Address> [<Data>] • Used to examine and modify the contents of memory locations one byte at
a time. • If the 8-bit data parameter is present on the command line, the byte at
memory location• <Address> is replaced with <Data> and the command is terminated.
– If no data is provided, then D-Bug12 enters the interactive memory modify mode.
– In the interactive mode, each byte is displayed on a separate line following the address of data.
– Single-character sub-commands are used for the modification and verification of memory contents in interactive mode.
– The available sub-commands are as follows:[<Data>] <CR> Optionally update current location and display the next location.[<Data>] </> or <=> Optionally update current location and redisplay the same
location.[<Data>] <^> or <-> Optionally update current location and display the previous location.[<Data>] <.> Optionally update current location and exit Memory Modify.

>mm 10001000 00 1001 00 FF1002 00 ^1001 FF 1002 00 1003 00 55 /1003 55 .>
MMW <Address> [<Data>] - Allows the contents of memory to be examined and/or modified as 16-bit hex data.- If the 16-bit data is present on the command line, the word at memory location
<Address> is replaced with <Data> and the command is terminated.- If no data is provided, then D-Bug12 enters the interactive memory modify mode. - MMW supports the same set of sub-commands as does the MM command.

>mmw 11001100 00F0 1102 AA55 0008 1104 0000 ^1102 0008 aabb1104 0000 1106 0000 .>Move <StartAddress> <EndAddress> <DestAddress> - The number of bytes moved is one more than <EndAddress> - <StartAddress>
>move 1000 10ff 1100>
RD – register display>rdPP PC SP X Y D = A:B CCR = SXHI NZVC38 1521 3C00 2014 0000 6E:14 1001 0100xx:1521 9C42 CPD $0042 >

RM – register modification
>rmPC=0000 1500SP=0A00 IX=0000 0100IY=0000 A=00 B=00 ffCCR=90 d1PC=1500 .>
<RegisterName> <RegisterValue> - Allow one to change the value of any CPU register.- Each bit of the CCR register can be changed by specifying its name.

>pc 2000 PC SP X Y D = A:B CCR = SXHI NZVC2000 0A00 0100 0000 00:FF 1101 0001>x 800 PC SP X Y D = A:B CCR = SXHI NZVC2000 0A00 0800 0000 00:FF 1101 0001>c 0 PC SP X Y D = A:B CCR = SXHI NZVC2000 0A00 0800 0000 00:FF 1101 0000>z 1 PC SP X Y D = A:B CCR = SXHI NZVC2000 0A00 0800 0000 00:FF 1101 0100>d 2010 PC SP X Y D = A:B CCR = SXHI NZVC2000 0A00 0800 0000 20:10 1101 0100>

CCR bit name Description Legal Values
SHNZVC
IMXM
STOP enableHalf carryNegative flagZero flagTwo's complement over flgCarry flagIRQ interrupt maskXIRQ interrupt mask
0 or 10 or 10 or 10 or 10 or 10 or 10 or 10 or 1
Table 3.4 Condition code register bits
• Invokes the one-line assembler/disassembler. • Allows memory contents to be viewed and altered using assembly language mnemonics. • When displaying instructions, each instruction is displayed in its mnemonic form.• The assembly/disassembly process can be terminated by a period.• The one-line assembler displays the current instruction and allows the user to enter new instruction.• User can skip the current instruction by pressing the Enter key.
ASM <Address> (1 of 2)

The following example displays instruction starting from $2000:
>asm 20002000 FC0800 LDD $0800 >2003 CD0900 LDY #$0900 >2006 CE000A LDX #$000A >2009 1810 IDIV >200B CB30 ADDB #$30 >200D 6B44 STAB 4,Y >200F B7C5 XGDX >2011 CE000A LDX #$000A >.>
The following example enters three instructions (in bold face) starting from $1500:
>asm 15001500 FC0800 LDD $0800 1503 F30802 ADDD $0802 1506 7C0900 STD $0900 1509 E78C TST 12,SP >.>
ASM <Address> (2 of 2)

>br 1020 1040 1050 ; set three breakpointsBreakpoints: 1020 1040 1050 >br ; display current breakpointsBreakpoints: 1020 1040 1050 >
BR [<Address> …] Setting or Examine Breakpoints• A breakpoint halts the program execution when the CPU
reaches the breakpoint address.• When a breakpoint is encountered, the D-Bug12 monitor
displays the contents of CPU registers and the instruction at the breakpoint (not executed yet).
• Breakpoints are set by typing the breakpoint command followed by one or more breakpoint addresses.
• Entering the breakpoint command without any breakpoint addresses will display all the currently set breakpoints.
• A maximum of ten user breakpoints may be set at one time.

>br 2000 2010 2020 2040 2090 ; set four breakpointsBreakpoints: 2000 2010 2020 2040 2090 >nobr 2000 2010 ; delete two breakpointsBreakpoints: 2020 2040 2090 >nobr ; delete all breakpointsAll Breakpoints Removed>
NOBR [<Address> <Address>] • Delete one or more previously defined breakpoints.• All breakpoints will be deleted if no addresses are
specified.

>g 1500User Bkpt EncounteredPP PC SP X Y D = A:B CCR = SXHI NZVC38 150C 3C00 7B48 0000 03:E8 1001 0001xx:150C 911E CMPA $001E >
G [<Address>]
• Begin execution of user code at the specified address.
• If no address is specified, CPU starts execution of the instruction at the current PC address.

>pc 1500PP PC SP X Y D = A:B CCR = SXHI NZVC38 1500 3C00 1000 1002 00:00 1001 0101xx:1500 CF1500 LDS #$1500 >gt 1540Temporary Breakpoint EncounteredPP PC SP X Y D = A:B CCR = SXHI NZVC38 1510 1500 1000 1002 1E:00 1001 0000xx:1510 3B PSHD >
GT <Address>
• Execute instruction until the given address and stop.• User usually needs to specify where the program
execution should start before issuing this command.

>pc 1500PP PC SP X Y D = A:B CCR = SXHI NZVC38 1500 1500 1000 1002 1E:00 1001 0000xx:1500 CF1500 LDS #$1500 >t PP PC SP X Y D = A:B CCR = SXHI NZVC38 1503 1500 1000 1002 1E:00 1001 0000xx:1503 CE1000 LDX #$1000 >t 2PP PC SP X Y D = A:B CCR = SXHI NZVC38 1506 1500 1000 1002 1E:00 1001 0000xx:1506 34 PSHX PP PC SP X Y D = A:B CCR = SXHI NZVC38 1507 14FE 1000 1002 1E:00 1001 0000xx:1507 861E LDAA #$1E >
T [<count>]• Used to execute one or multiple instructions starting from the current
PC address.
• As each program instruction is executed, the CPU register contents and the next instruction to be executed are displayed.
• Only one instruction will be executed when no count is specified.

>call 1600Subroutine Call Returnedpp PC SP X Y D = A:B CCR = SXHI NZVC38 1600 0A00 0032 0900 00:31 1001 0000xx:1600 FC1000 LDD $1000 >
CALL [<Address>]
• Used to execute a subroutine and returns to the D-Bug12 monitor program.
• All CPU registers contain the values at the time the final RTS instruction was executed, with the exception of the program counter.
• The program counter contains the starting address of the subroutine when returning from the subroutine.

UserTerminal(or PC)
your demo board
D-Bug12Low-levelinterfaceroutine
Background debugcommand
Targetsystem
HCS12microcontroller
Figure 3.20 D-Bug12's POD mode conceptual model
The Pod Mode
• This mode is intended to run the demo board as a BDM host to control a target board.– Arrangement shown below

The Jump-to-EEPROM Mode
• Execute a small program from the on-chip EEPROM whenever the EVB is powered up or reset.
• This mode provides a way to execute a program in a standalone manner without having to erase and program the on-chip flash memory using the bootloader.

HCS912DP256 Bootloader
a) Erase Flashb) Program Flashc) Set Baud Rated) Erase EEPROM?
Figure 3.21 Serial bootloader prompt
The Bootloader Mode• The Bootloader resides from $F000 to $FFFF.
• Bootloader can be used to erase and reprogram the remainder of on-chip flash memory or erase the on-chip EEPROM.
• Bootloader utilizes the SCI port for communication.
• The only required host program is a terminal program that can communicate at 9600 to 115,200 baud and supports XON/XOFF handshaking.
• The bootloader mode prompt is as follows:

Tips for Assembly Program Debugging
• Syntax errors– Misspelling of instruction mnemonics
• Starting instruction mnemonic at column 1. The mnemonic is treated as a label whereas the operands are treated as mnemonic.
– Missing operands• Will be highlighted by the assembler and are easy to fix.
• Logic errors– Using extended (or direct) mode instead of immediate mode
• A program with this type of addressing mode error is on the next page.

N equ 20 ; array countorg $1000
array dc.b 2,4,6,8,10,12,14,16,18,20dc.b 22,24,26,28,30,32,34,36,38,40
sum ds.w 1
org $1500ldx array ; place the starting address of array in Xmovw 0,sum ; initialize sum to 0ldy N ; initialize loop count to N
loop ldab 1,x+ ; place one number in B and move array pointersex B,D ; sign-extend the 8-bit number to 16-bitaddd sum ; add to sumstd sum ; update the sumdbne y,loop ; add all numbers to sum yet?swi ; return to monitorend
- Assemble and download this program onto the demo board.
>load....done>

• Use the asm command to make sure that the program is downloaded correctly.
>asm 1500xx:1500 FE1000 LDX $1000 >xx:1503 180400001014 MOVW $0000,$1014 >xx:1509 DD14 LDY $0014 >xx:150B E630 LDAB 1,X+ >xx:150D B714 SEX B,D >xx:150F F31014 ADDD $1014 >xx:1512 7C1014 STD $1014 >xx:1515 0436F3 DBNE Y,$150B >xx:1518 3F SWI >.
• Make sure that program data is downloaded correctly. Use the md command:
>md 1000 10101000 02 04 06 08 - 0A 0C 0E 10 - 12 14 16 18 - 1A 1C 1E 20 ............... 1010 22 24 26 28 - 00 00 B9 A9 - 2A CA FA DB - AC DA 18 97 "$&(....*.......>

>g 1500User Bkpt EncounteredPP PC SP X Y D = A:B CCR = SXHI NZVC38 1519 3C00 0213 0000 FF:07 1001 1000xx:1519 88F4 EORA #$F4 >Exam the execution result – incorrect!!>md 10101010 22 24 26 28 - FF 07 B9 A9 - 2A CA FA DB - AC DA 18 97 >
• The program is short.• Errors can be found by tracing.• Set PC to the start of the program (at $1500)
>pc 1500PP PC SP X Y D = A:B CCR = SXHI NZVC38 1500 3C00 0213 0000 FF:07 1001 1000xx:1500 FE1000 LDX $1000 >
Run the Program

>t 1PP PC SP X Y D = A:B CCR = SXHI NZVC38 1503 3C00 0204 0000 FF:07 1001 0000xx:1503 180400001014 MOVW $0000,$1014 >
• The executed instruction is “ldx $1000” which should place the start address of the array in X. • The instruction trace result shows that X receives $0104, not $1000.• This is due to addressing mode error.• Change the instruction to ldx #$1000 and rerun the program. • Reload the program and trace the program.• Trace two instructions this time.
Trace One Instruction at a Time

>t 2PP PC SP X Y D = A:B CCR = SXHI NZVC38 1503 3C00 1000 0000 FF:F0 1001 0000xx:1503 180400001014 MOVW $0000,$1014 PP PC SP X Y D = A:B CCR = SXHI NZVC38 1509 3C00 1000 0000 FF:F0 1001 0000xx:1509 DD14 LDY $0014 >md 1010 ; examine sum at $1014~$1015.1010 22 24 26 28 - FF 00 B9 A9 - 2A CA FA DB - AC DA 18 97 >
• We expect the variable sum (at $1014 and $1015) to receive $0000. But it didn’t. • The error is again caused by incorrect use of the addressing mode.• The movm 0,sum instruction copies the contents of memory location 0 to sum.• Change the second instruction to movw #0,sum. Rerun the program and examine the memory contents. • It is still incorrect !!

>load*>g 1500User Bkpt EncounteredPP PC SP X Y D = A:B CCR = SXHI NZVC38 1519 3C00 100F 0000 00:F0 1001 0000xx:1519 88F4 EORA #$F4 >md 10101010 22 24 26 28 - 00 F0 B9 A9 - 2A CA FA DB - AC DA 18 97>
• Trace the program up to the third instruction:

>pc 1500PP PC SP X Y D = A:B CCR = SXHI NZVC38 1500 3C00 100F 0000 00:F0 1001 0000xx:1500 CE1000 LDX #$1000 ; 1st instruction >t 3PP PC SP X Y D = A:B CCR = SXHI NZVC38 1503 3C00 1000 0000 00:F0 1001 0000xx:1503 180300001014 MOVW #$0000,$1014 ; 2nd instruction PP PC SP X Y D = A:B CCR = SXHI NZVC38 1509 3C00 1000 0000 00:F0 1001 0000xx:1509 DD14 LDY $0014 ; 3rd instructionPP PC SP X Y D = A:B CCR = SXHI NZVC38 150B 3C00 1000 000F 00:F0 1001 0000xx:150B E630 LDAB 1,X+ >• The program intends to load 20 into Y with the third instruction and expect Y to be set to 20. But Y did not get 20. It receives F instead.• This is due to the incorrect use of the addressing mode. • Change the instruction to ldy #20 and rerun the program.

>g 1500User Bkpt EncounteredPP PC SP X Y D = A:B CCR = SXHI NZVC38 151A 3C00 1014 0000 01:A4 1001 0000xx:151A F421BD ANDB $21BD >md 10101010 22 24 26 28 - 01 A4 B9 A9 - 2A CA FA DB - AC DA 18 97 >
• After this correction, sum receives the correct value $1A4 (420).

• Example Program – Finding the sum of elements of an array
N equ 20 ; array countorg $1000
array dc.b 2,4,6,8,10,12,14,16,18,20dc.b 22,24,26,28,30,32,34,36,38,40
sum ds.w 1
org $1500ldx #array ; place the starting address of array in Xmovw #0,sum ; initialize sum to 0ldy #N ; initialize loop count to N
loop ldd 1,x+ ; place one number in D and move array pointeraddd sum ; add to sumstd sum ; update the sumdbne y,loop ; add all numbers to sum yet?swi ; return to monitorend
Mismatch of Operand Size

•The value of sum is incorrect after running the program:
>md 10101010 22 24 26 28 - A6 1F B9 A9 - 2A CA FA DB - AC DA 18 97 >
This program can be debugged by tracing:>pc 1500PP PC SP X Y D = A:B CCR = SXHI NZVC38 1500 3C00 1014 0000 A6:1F 1001 1000xx:1500 CE1000 LDX #$1000 >tPP PC SP X Y D = A:B CCR = SXHI NZVC38 1503 3C00 1000 0000 A6:1F 1001 0000xx:1503 180300001014 MOVW #$0000,$1014 >tPP PC SP X Y D = A:B CCR = SXHI NZVC38 1509 3C00 1000 0000 A6:1F 1001 0000xx:1509 CD0014 LDY #$0014 >tPP PC SP X Y D = A:B CCR = SXHI NZVC38 150C 3C00 1000 0014 A6:1F 1001 0000xx:150C EC30 LDD 1,X+

>tPP PC SP X Y D = A:B CCR = SXHI NZVC38 150E 3C00 1001 0014 02:04 1001 0000xx:150E F31014 ADDD $1014 >The 4th instruction should place the value 2 in D rather than $0204. This is due tothe incorrect use of the instruction of ldd 1,x+. This instruction should be replacedby the following two instructions:
ldab 1,x+clra
• Other logic errors: •Inappropriate Use of Index Addressing Mode •Indexed addressing mode is often used to step through array elements.•After accessing each element, the index register must be incremented or decremented.•Program execution can’t be correct if index register is incremented or decremented incorrectly.•This error can be found after performing computation in the first one or two elements by program tracing.

Stack Frame Errors
• This error will be discussed in Chapter 4.

Incorrect Algorithm
• This type of error can be detected by tracing the program.– The user needs to read the program carefully in
order to find out the errors.

BDM-based Source Level Debuggers• BDM module allows the host to access the resources of the target
using a single pin.• The BDM mode allows the tool vendor to design inexpensive source-
level debuggers.– The hardware to support source-level debugging can be very inexpensive. – The hardware is often called a pod (or BDM kit).
• The simplest BDM kit is a very simple HCS12 demo board with a resident D-Bug12 monitor and configured to operate in the POD mode.
– The tool vendor needs to provide a PC-based software to issue commands to the BDM kit to access the resources (registers and memory locations) of the target hardware.
– The PC-based software provides a user friendly interface and allows the user to set breakpoint, display and modify registers and memory locations, set up a watch list, trace program execution, and so on.
• The simplest BDM kit needs only a terminal program to be run on the PC.
• The Wytec DragonBDM kit has no PC-based software to provide source-level debugging.

Functions of DragonBDM Kit
• Allows the user to program application programs into the target MCU
• Allows the user to use all D-Bug12 commands to perform debugging on the target hardware
• The target hardware does not need to have any resident monitor program
• Very affordable• Allows users to develop product using many
inexpensive HCS12C32 kits on the market.