Embed Size (px)
Citation preview

Chapter 2Chapter 2
Kinematic Analysisthe study of deformational motion
CONTINUED still ...

Our friend the strain ellipsoid
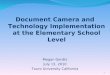
Finite Strain Ellipsoid and Plane Strain
The finite strain ellipsoid is the 3-D counterpart of the strain ellipse. It represents the homogeneously deformed state of an initial sphere.
As in 2-D, it is defined by 3 mutually perpendicular finite stretching axes.

Finite Strain Ellipsoid and Plane Strain
If stretching in the S1 direction is exactly balanced by shortening in the S3 direction then S2 is unchanged (S2 = 1).
This condition is called plane strain - that is, all the strain occurs in the S1-S3 plane.
In general, however, most strains are truly 3-D and thus S2 ≠ 1.

Finite Strain Ellipsoid and Plane Strain
S1 = maximum finite stretch.
S2 = intermediate finite stretch.
S3 = minimum finite stretch.
For plane strain, no finite strain occurs in the S2 direction, which is normal to the plane of the strain ellipse.
A perfect sphere is transformed into an ellipsoid of the same volume

The Strain Ellipsoid and Its Application

Remember Oolites?
Little fossil boogums that are excellent initially spherical strain
markers

To get at the axial ratio for an ellpisoid we do effectively the same as we do in 2D:Volume of a sphere and an ellipsoid:
Assume there is no volume loss:
Solve for the radius of the circle
The Strain Ellipsoid and Its Application
Vs = 4/3r3 Ve = 4/3abc
Vs = Ve
r = (abc)1/3

Dilational (volume) Changes
Veining adds material and therefore volume to the rockmass

Positive dilation - volume increase

Negative dilation - volume decrease
Pressure solutioncleavage
Material dissolves away along planes that are roughly perpendicular to the shortening direction

Negative dilation - volume decrease
Stylolites are seams of Stylolites are seams of insoluable residue that insoluable residue that are left behind after are left behind after material has disolved material has disolved away.away.



Coaxial and Noncoaxial Strain
If the orientation of the principal axes rotate during the deformation, as in simple shear (an external rotation, as opposed to an internal rotation where lines rotate relative to the axes) then it is a noncoaxial defm.
If the principal axes maintain their orientations then it is a coaxial defm. (pure shear).

Simple and Pure ShearSimple shear - like a sliding card deck. The initially vertical sides of the deformed parallelogram lengthen, but the top and bottom remain constant.
Pure shear - shortening in one direction and lengthening on edges that are perpendicular. Edges of the square remain parallel. Principal axes do not rotate.


Chapter 3Chapter 3
Dynamic Analysisthe stresses that cause deformation

Concept of Dynamic AnalysisThe goals of dynamic analysis are:
1) to interpret the stresses responsible for deformation.
2) describe the nature of the forces that cause the stresses.
3) understand the relationship between stress, strain and rock strength.
Describing stress and force is a mathematical exercise.
Dynamic analysis is about the relationship between the stresses that cause deformation and the rock’s strength, which
tends to resist that deformation.

ForceForce is classically defined as that which changes the state of rest or motion of a body.
Only a force can cause a stopped object to move or change the motion (direction and velocity) of a moving object.
Newton’s 1st Law: An object at rest will remain at rest and an object in motion will remain in motion unless it experiences a net force, which causes it to accelerate.
Newton’s 2ndLaw: The acceleration of an object is directly proportional to the net force on it and inversely proportional to it’s mass.

Force, Mass and Weightforce = mass x acceleration,
F = ma,
mass = density x volume,
m = V,
therefore,
= m/V,
Weight is the magnitude of the force of gravity (g) acting upon a mass.
The newton (N) is the basic (SI) unit of force.


Forces as VectorsForce is a vector - that is, it has magnitude and direction. Vectors can be added and subtracted, and as such we are able to treat them using vector algebra, and evaluate them to determine whether the forces on a body are in balance.
Static equilibrium: a state where all forces are balanced. The force of gravity is pulling you towards the center of the Earth, but it is resisted by the upward force supplied by the floor.
Dynamic equilibrium: a state of uniform motion - constant linear velocity, no accelerations.

Load
Force

Forces in the Subsurface WorldTypically we think of the Earth as being at rest - in static equilibrium, or moving very slowly - in dynamic equilibrium.
When there are net forces they cause accelerations that are usually one of 2 kinds:
1) slow ponderous motion of a tectonic plate that increases or decreases velocity over a very long time, or;
2) sudden, short lived, strong accelerations during fault slip accompanying Earthquakes.

Types of Forces2 fundamental types:
1) Body forces, that act on the mass of a body (gravity, electromagnetic), and are independent of forces applied by adjacent material, and;
2) Contact forces, are pushes and pulls across real or imaginary surface of contact such as faults.
3 different type of loading due to contact forces:
1) gravitational loading - pushing on adjacent rock.
2) thermal loading - expansion or contraction.
3) displacement loading - push due to motion.

Stress ()Stress is force per unit area:
= F/A

Units of Stress

Ugly Sculpture Stress Calculation

Stress Underground (Pressure)

Stress Calculations: Stress on a Plane




The strain ellipsoid is also our friend