Embed Size (px)
Citation preview

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 1/21
Chapter 2. Review of Elasticity
1. Stress
Plane-Strain - The plane-strain distribution is based on the assumption that
0 z u z ∂ = =∂ (2-1)
where z represents the lengthwise direction of an elastic elongated body of constant cross section
subjected to uniform loading (in the case of uniaxial problems,/ 0
y y u∂ ∂ = =
).
xy, , x y
u v u v x y y x
ε ε γ ∂ ∂ ∂ ∂= = = +∂ ∂ ∂ ∂ (2-2)
are functions of x and y only and the strain components
xz yz, , z
w w u w v z x z y z
ε γ γ ∂ ∂ ∂ ∂ ∂= = + = +∂ ∂ ∂ ∂ ∂ (2-3)
vanish. The corresponding strain-stress relationship becomes
( )
( )
( )
11
11
2 1
x x y
y y x
xy xy xy
E
E
G E
µ ε µ σ µσ
µ ε µ σ µσ
τ µ γ τ
+ = − − + = − −
+= =
(2-4)
Hence,
( ) ( )29,000
11,1542 1 2 1 0.3
E G
µ = = =+ + (2-5)
1

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 2/21
The stress-strain relationship is
( ) ( ) ( )
1 0
1 01 1 2 0 0 1 2 / 2
x x
y y
xy xy
E σ µ µ ε σ µ µ ε
µ µ τ µ γ
− = −
+ − − (2-6)
( ) z x yσ µ σ σ = + (2-7)
Plane-Stress - The plane stress distribution is based on the assumption that
0 z yz xz σ τ τ = = = . (2-8)
The stress-strain relationship is
( )2
1 0
1 01
0 0 1 / 2
x x
y y
xy xy
E σ µ ε σ µ ε
µ τ µ γ
= − −
(2-9)
and the strain-stress relationship is
( )
1 01
1 0
0 0 2 1
x x
y y
xy xy
E
ε µ σ ε µ σ γ µ τ
− = − +
(2-10)
If we assume a state of plane stress, we need not have a corresponding plane strain and conversely,
if we assume a state of plane strain, we need not have a corresponding plane stress state. These are
entirely different assumptions.
Home Work #3
2

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 3/21
Using the generalized Hooke’s law, prove that the maximum value of Poisson’s ratio, µ , cannot
exceed 0.5.
For an analytical determination of the distribution of static or dynamic displacements and
stresses in a structure (body) under prescribed external loading and temperature, we must obtain
a solution to the basic equations of the theory of elasticity, satisfying the imposed boundary
conditions on forces and/or displacements.
For general 3-D structures, we have
6: strain-displacement relationships; ( ), , f u v wε =
6: stress-strain relationship, generalized Hooke’s law
3: Equations of equilibrium, linear momentum balance
15
Thus, there are 15 equations available for 15 unknowns, namely
3: displacements: u, v, w
6: stresses
6: strains
15
In the case of rigid body mechanics problems, we may use 6 equations of equilibrium
including three equations of linear momentum balance and three equations of angular momentum
3

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 4/21
balance. Since the three equations of angular momentum balance are used up in establishing the
symmetry of shear stresses ( ij jiτ τ =
), they cannot be used again along with the symmetry of
shear stresses.
If we include thermal strains ( T e T α = ), then the total strain becomes
ij ij ije T ε δ α = + (2-11)
where ije = total strain, ijε = elastic strain, and ijδ = Kronecker delta ( = 1 when i = j and = 0
when i j). The index i and j vary along x, y, z.
Practice #1
Write the generalized Hooke’s law for the stress and strain relationship for 3-D problems in a
matrix equation including the thermal terms.
Equations of equilibrium
4

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 5/21
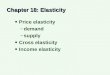
Fig. 2-1
Parallelepiped used in the derivation of internal equilibrium equations. Note that equilibrium can
only be established by forces. Hence, each stress component must be multiplied by the projected
area on which it acts and the body force must be multiplied by the infinitesimal volume,
( ) ( ) ( )dv dx dy dz =
z
xx xx
dx x
σ σ
∂+
∂
xz xz dx
x
τ τ
∂+
∂
xz τ
x yτ
xxσ
x
X
dy
dz x y
xy xy dx
x
τ τ
∂+
∂
dx
5

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 6/21
xy
0
0x
0
xy x xz x
y yz y
yz xz z z
X x y z
X y z
X x y z
τ σ τ
τ σ τ
τ τ σ
∂∂ ∂+ + + =∂ ∂ ∂∂ ∂ ∂+ + + =∂ ∂ ∂∂∂ ∂+ + + =∂ ∂ ∂
(2-12)
Equation (2-12) is the three equations of linear momentum balance written in terms of stresses
and body forces. Frequently the weight of the body is represented as an equivalent externally
applied distributed load. Note only three equations of equilibrium (not six).
Compatibility Equations
The strains and displacements in an elastic body must be continuous, and this imposes the
condition of continuity on the derivatives of displacements and strains. This can be achieved by
eliminating the displacement terms ( iu or u, v, w) in the strain-displacement relationships.
2 22
2 2
2 22
2 2
2 22
2 2
2
2
2
1
2
12
12
y xy x
y yz z
x xz z
yz xy x xz
y yz xy xz
x
yz xy xz z
y x x y
z y y z
x z x z
y z x x y z
z y x y z
x y z x y z
ε γ ε
ε γ ε
ε γ ε
γ γ ε γ
ε γ γ γ
γ γ γ ε
∂ ∂∂ + =∂ ∂ ∂ ∂∂ ∂∂+ =∂ ∂ ∂ ∂
∂ ∂∂ + =∂ ∂ ∂ ∂∂ ∂ ∂ ∂∂= − + + ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂∂= − + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂= + −∂ ∂ ∂ ∂ ∂ ∂
(2-13)
6

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 7/21
For 2-D Problems
We have 8 equations for 2 displacements (u,v), 3 stresses ( , , x y xyσ σ τ ) and 3 strains ( , , x y xyε ε γ )
for 3 strain-displacement relationships, 3 stress-strain relationships, and 2 equations of
equilibrium. For 2-D plane-stress problems ( 0 z xz yz σ τ τ = = = , 0 yz xz γ γ = = , and , , , x y z xyε ε ε γ ⇐
non-zero), equation (2-13) leads to
2 22
2 2 y xy x
y x x y
ε γ ε ∂ ∂∂ + =∂ ∂ ∂ ∂(2-14)
As general 3-D problems are so very complex, particularly problems with irregular
boundaries, that it is nearly impossible, if not impossible at all, to solve analytically. Therefore,
it is advisable to refer to digital computer oriented finite element methods.
In equation (2-12), , , x y z X X X are body forces. There are two important practical cases
of body forces, viz., gravitational force and centrifugal force. If we limit our discussion to
gravitational forces only, then
x x
y y
X g
X g
ρ ρ
== (2-15)
7

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 8/21
where ρ =mass density of the material and , x y g =gravitational acceleration in the x and y
directions. In general, for 2-D elasticity problems, we have 3 unknowns, , , x y xyσ σ τ with only 2
equations of equilibrium. Hence, we need one more equation which is provided by the
deformation compatibility condition.
(b) Strain (at a point)
8

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 9/21
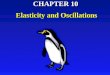
Fig. 2-2
Taylor series
dydx
α vuA B
β θ B ′
udu dy y
∂=∂
B ′′
du
∂=
∂
vdv dy
y
∂=
∂
C
C
′
y
A ′
C′′
9

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 10/21
( )2 2
2 20 0 0 2 2
0 0 0 0
1 1,
2 2 f f f f
f x dx y dy f dx dy dx dy hot x y x y
∂ ∂ ∂ ∂ + + = + + + + + ∂ ∂ ∂ ∂
( ), (at B')
u v f u dx v u dx dx hot
x x
∂ ∂+ = + + +∂ ∂ (2-16)
( ), (at C')v u
f u v dy v dy dy hot y y∂ ∂+ = + + +∂ ∂ (2-17)
An engineering shear strain is defined by the total angular change between dx and dy. Hence,
tan
1
v vdx dx v x xu u x
dx dx dx x x
α α
∂ ∂∂∂ ∂= = =∂ ∂ ∂
+ + ∂ ∂
B
tan1
u udy dy
u y yv yvdy dy dy y y
β β
∂ ∂∂∂ ∂= = =∂ ∂ ∂+ + ∂ ∂
B
as or 1.0 xy
u v u v y x x y
γ ∂ ∂ ∂ ∂= + <<< ∂ ∂ ∂ ∂
(2-18)
Neglecting higher order terms, the small strains (otherwise known as the Cauchy strains)
become
' " x
A B AB udx x
ε − ∂= =∂ (2-19)
' " y
A C AC vdy y
ε − ∂= =∂ (2-20)
Taking successive partial derivatives of the above equations, we have
2 22 3 3 3 3
2 2 2 2 2 2, , and y xy x u v u v y x y x x y x y x y x y
ε γ ε ∂ ∂∂ ∂ ∂ ∂ ∂= = = +∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
10

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 11/21
Hence, the compatibility equation in 2-D problems in terms of strains is
2 22
2 2 0 y xy x
y x x y
ε γ ε ∂ ∂∂ + − ≡∂ ∂ ∂ ∂(2-14)
(c) Stress-Strain Relationships
The Hooke’s law in the linearly elastic materials is
i) 1-D
x x E
σ ε =
ii) 2-D
/ / x x y E E ε σ µσ = −
/ / y y x E E ε σ µσ = −
( )/ 2 1 / xy xy xyG E γ τ µ τ = = +
(d) Summary
(1) Equilibrium
0 xy x X x y
τ σ ∂∂ + + =∂ ∂
0 y xy Y y x
σ τ ∂ ∂+ + =∂ ∂
(2) Strain-Displacement
11

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 12/21
x
u x
ε ∂= ∂
y
v
yε ∂=
∂
xy
u v y x
γ ∂ ∂= +∂ ∂
(3) Stress-Strain
( )1 x x y E
ε σ µσ = −
( )1 y y x E
ε σ µσ = −
( )2 11 xy y xyG E
µ γ τ τ
+= =
Recall the compatibility equation (2-14) for 2-D elasticity problems.
2 22
2 20 xy y x
y x y x
γ ε ε ∂ ∂∂ − + =∂ ∂ ∂ ∂
Rewriting (2-14) in terms of stresses leads to
( ) ( ) ( )22 2
2 22 1 0 xy x y y x y x y x
τ σ µσ µ σ µσ
∂∂ ∂− − + + − =∂ ∂ ∂ ∂(2-21)
Recall the equations of equilibrium for 2-D problems given by
0 xy x x g
x y
τ σ ρ
∂∂ + + =∂ ∂
0 y xy y g
y x
σ τ ρ
∂ ∂+ + =∂ ∂
12

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 13/21
These equations are automatically satisfied if one introduces a stress function, ( ), x yφ such that
2 2 2
2 2, , and x y xy x x g y g x y x x y
φ φ φ σ σ τ ρ ρ ∂ ∂ ∂= = = − − −
∂ ∂ ∂ ∂(2-22)
If the gravitational forces in equation (2-22) may be neglected (or transform as externally applied
loads). This function was first introduced by G.B. Airy in 1862 and is called the Airy’s stress
function. If one substitutes Airy’s stress function given by equation (2-22) into equation (2-21),
one obtains
4 4 4
4 2 2 42 0 x x y y
φ φ φ ∂ ∂ ∂+ + =∂ ∂ ∂ ∂ (2-23)
Since
4 4 4
4 2 2 42 0 x x y y
φ φ φ ∂ ∂ ∂+ + =∂ ∂ ∂ ∂ ( )22 2
222 2 x y
∂ ∂= + = ∇ ∂ ∂ (2-24)
Equation (2-24) may be written as 4 0φ ∇ = . The operator 2 2
22 2 x y
∂ ∂∇ = +∂ ∂ is called Laplace
operator or harmonic operator and equation (2-24) is called a biharmonic equation.
Example
13

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 14/21
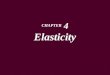
Fig. 2-3
Assumptions
(1) h<<d
(2) P >>> g ρ ⇐neglect the gravitational force.
From the static point of view, we see that the bending moment at any point along the beam axis
will be proportional to x and the stress component, xσ , at any point of the section will be
proportional to y. Accordingly, we shall assume a trial function such that
2
12 x c xy y
φ σ ∂= =∂ (a)
where 1c =constant. Upon integration, we find
( ) ( )311 26
c xy yf x f xφ = + + (b)
where ( ) ( )1 2and f x f x are unknown functions of x only. Substituting the above expression for
φ into equation (2-23) results in
( ) ( )1 231
6
f x f xc y y
x x xφ ∂ ∂∂ = + +∂ ∂ ∂
14
lh
d
P
y

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 15/21
( ) ( )2 221 2
2 2 2
f x f x y
x x xφ ∂ ∂∂ = +∂ ∂ ∂
( ) ( )3 331 2
3 3 3
f x f x y
x x x
φ ∂ ∂∂ = +∂ ∂ ∂
( ) ( )4 441 2
4 4 4
f x f x y
x x xφ ∂ ∂∂ = +∂ ∂ ∂
( )2112
c xy f x
yφ ∂ = +∂
2
12 c xy y
φ ∂ =∂
3
13 c x y
φ ∂ =∂
4
4 0 y
φ ∂ =∂
( )2121
2
f xc y
x y xφ ∂∂ = +∂ ∂ ∂
( )231
2 2
f x
x y xφ ∂∂ =∂ ∂ ∂
4
2 2 0 x y
φ ∂ =∂ ∂
Hence,
( ) ( )4 4
1 24 4 0d f x d f x y
dx dx+ = (c)
15

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 16/21
Since ( ) ( )1 2and f x f x are functions of x only, the second term in equation (c) is independent
from y. But equation (c) must be satisfied for all values of x and y in the cantilever beam. This
is possible only if
( ) ( )4 41 2
4 40 and 0d f x d f x
dx dx= =
or
( ) 3 21 2 3 4 5 f x c x c x c x c= + + + and
( ) 3 22 6 7 8 9 f x c x c x c x c= + + +
Thus, we have
( )3 3 2 3 212 3 4 5 6 7 8 96
c xy y c x c x c x c c x c x c x cφ = + + + + + + + +
Then
( ) ( )2
2 6 3 72 6 2 y c y c x c y c x
φ σ ∂= = + + +∂
221
2 3 43 22 xy
c y c y c x c
x yφ
τ ∂= − = − − − −∂ ∂
The boundary condition requires that
0 at / 2 y y d σ = = ±
Hence,HH
16

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 17/21
( ) ( )2 6 3 76 / 2 2 / 2 0c d c x c d c+ + + = and
( ) ( )2 6 3 76 / 2 2 / 2 0c d c x c d c− + + − + =
These conditions must be satisfied for all x between 0 and l ; it follows that
2 6 3 7 2 6 3 7/ 2 0, / 2 0, / 2 0, / 2 0c d c c d c c d c c d c+ = + = − + = − + =
Solving these 4 equations simultaneously, we have 2 3 6 7 0c c c c= = = = .
Thus,
21
42 xy
c y cτ
= − −
To satisfy the condition that 0 on / 2 xy y d τ = = ± (no shear stress on free surface), we must have
221
4 4 108 8c d
d c c c− − = ⇒ = −
Hence,
2 21 1
2 8 xy
c c y d τ = − +
On the loaded edge of the beam, the sum of the distributed shearing stress must be equal to P .
Hence,
( )/2 /2 2 21
/2 /24
8
d d
xyd d
c hhdy y d dy P τ
− −− = − =∫ ∫ ⇒ 1 3
12 P c
hd = −==
17

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 18/21
Consider the reason why a negative sign is placed in front of the shear stress xyτ in the above
equation. By a consistent sign convention, the shear stress in the positive direction at the
negative face is considered as negative as shown in the sketch.
Recall the moment of inertia of a rectangular section,3
12hd
I = . The expression for the stress
components are, therefore,
22, 0,
2 4 x y xy
My Pxy P d y
I I I σ σ τ
= − = − ≡ = − −
This coincides exactly with the elementary solution. From this solution, we see that the shearing
stress distribution is parabolic and xσ varies linearly. If we introduce other boundary conditions
than those used, other solution is also feasible (recall the trial function φ ).
Recalling the strain-displacement relationships and the 2-D Hooke’s law, we have
( ) ( ) 222 1 1
4
x x
y x y
xy xy
u Pxy x E EI v Pxy
y E E EI
u v d y
y x E EI
σ ε
σ µσ µ ε
µ τ µ γ
∂ = = = −∂∂
= = = − =∂+ + ∂ ∂+ = = = − − ∂ ∂
. (d)
Integrating the first two equations, we have
negativefacef f
18

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 19/21
( )
( )
21
22
2
2
P u x y g y
EI P
v xy g x EI
µ
= − +
= +(e)
Substituting equation (e) into the 3rd equation of (d), yields
( ) ( ) ( )1 22 2 211
2 2 4
dg y dg x P P y x d
dy EI dx EI EI
µ µ + − + = − + −
We note that the terms on the left of the equal sign are functions of y only and the terms on the
right of the equal sign are functions of x only. A function of x can be equal to a function of y for
all x and y only if they are both equal to a constant, say, 1a . Thus,
( )1 211
2
dg y P y a
dy EI µ = + +
( ) ( )2 2 211
2 4dg x P P x d a
dx EI EI µ += − −
Integrating, we have
( ) 31 1 21
3 2 P
g y y a y a EI
µ = + + +
( ) ( )3 22 1 3
1
6 4
P P g x x d x a x a
EI EI
µ += − − +
Hence,
2 31 21
2 3 2 P P
u x y y a y a EI EI
µ = − + + + +
19

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 20/21
( )2 3 21 3
1
2 6 4
P P P v xy x d x a x a
EI EI EI
µ µ += + − − +
The integral constants, 1 2 3, ,a a a , can be determined by applying three boundary conditions at
the fixed support of the cantilever (at x= l ). They are
0
0
0
u
v
v x
==
∂ =∂
(3 boundary conditions)
Hence,
( ) 22
1
2
3
3
1
2 40
3
Pd P a
EI EI a
P a
EI
µ += −
=
=
l
l
and
( )2
2 3 21 12 3 2 2 P P d
u x y y y EI EI
µ µ
= − + + + − + l
2 32 3
2 6 2 3 P P P P
v xy x x EI EI EI EI
µ = + − +l l
From the elementary beam theory, the deflection curve ( ( )0v y = ) is given by
3 2 3
0 6 2 3 y
Px P x P v EI EI EI = = − +
l l
checks exactly!
The solution of a 2-D problem subjected to inplane forces may be dependent upon how to
choose a correct trial stress function, φ , that can lead to a guess work. ⇐ haphazard!!
20

7/30/2019 Chapter 2 Review of Elasticity
http://slidepdf.com/reader/full/chapter-2-review-of-elasticity 21/21
21