Embed Size (px)
Citation preview

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 1Chapter 3.4: Synchronization
Chapter 2: Basics
Chapter 3: Multimedia Systems – Communication Aspects and Services• Multimedia Applications
and Communication• “Multimedia” Transfer
and Control Protocols
• Quality of Service and Resource Management
• Synchronization
• Multimedia Operating Systems
Chapter 4: Multimedia Systems – Storage Aspects
Chapter 5: Multimedia Usage
3.4: Synchronization
• Computer Clocks• Network Time Protocol
• One-way Delay Measurements
• Synchronization of Media Streams

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 2Chapter 3.4: Synchronization
Why Synchronization?
Necessity:
• Synchronization of different media streams, e.g. in videoconferencing: audio and video are transmitted as two independent streams: synchronization has to take place when streams are played
• Furthermore: distributed operations must be coordinated for in-time data delivery and buffer management
• Most media synchronization schemes demand for knowledge about temporal relations between source and sink(s) → accurate global time scale required
Example: Audio/Video presentation with multiple sources
• Presentation at sink must start at TC
• Sources A and B must start at TC - OAC - DAC and TC - OBC - DBC
• Problem: OAC, OBC, DAC, DBC unknown
Source A:Audio
Source B:Video
Clock offsetA ↔ C: OAC
Clock offsetB ↔ C: OBC
Sink C
Networkdelay DAC
Networkdelay DBC

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 3Chapter 3.4: Synchronization
Computer Clocks
Problem of synchronization
• Universal Coordinated Time (UCT): International time and frequency standard, based on synchronized Caesium clocks (accuracy about 10-12 sec)
• Investigation of 20.000 clocks of Internet hosts: 50% show offset > 2 minutes (with respect to UCT), 10 % show offset > 4 hours, some several weeks!
Reasons
• Clock adjustment usually via wrist watch of operator• Differences in the oscillator frequencies (clock drift) → clocks tend to wander from the exact time
• Drift in parts per million (ppm) sometimes as high as a few hundred ppm (or some seconds per day)
• Further problems: Clock resolution (as bad as 10 ms), non real-time operating systems (e.g., UNIX)
Oscillator(e.g., quarz)
Prescaler(e.g. 100 Hz)
Clock counter
SystemProcessor
Ticks / tick adjust

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 4Chapter 3.4: Synchronization
Computer Clocks / Hardware Oscillators
• Atomic clocks are far too expensive for common use• Alternative: transmitting time information from hosts with atomic clocks
→ Software-based clock synchronization methods needed
Typical stability and drift values:
Oscillator type Stability (per day) DriftCaesium beam 3⋅10-7 ppm 3 ⋅10-6 ppm (per year)Rubidium cell 5⋅10-6 ppm 3⋅10-5 ppm (per year)Quarz (digital) 0.05 ppm 0.001 ppm (per day)Quarz (analog) 0.5 ppm 0.003 ppm (per day)Quarz (standard) up to 1 ppm up to several 100 ppm (per day)
i.e. up to ≈ 1 ms / day

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 5Chapter 3.4: Synchronization
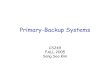
Clock Synchronization in the Internet
Network Time Protocol (NTP) (RFC 1119):
••
Atomic clock
GPS
Primary servers
Backup path
Client
Stratum-4
SynchronizedLAN clusterSecondary
servers
Stratum-1
Stratum-2 Stratum-3
• Exchange of timestamps between time servers and clients via UDP• Virtual hierarchy of synchronized Internet hosts

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 6Chapter 3.4: Synchronization
NTP Hierarchy
1
2
3
2
3 3
Primary servers are connected to UCT sources
Secondary servers are synchronised to primary servers (Synchronization subnet )
Note: this is only an example, there can be more than three layers
More accurate time
Lowest level servers in users’computers, synchronised to secondary servers
• The synchronisation subnet can reconfigure if failures occur, e.g.– a primary that loses its UCT source can become a secondary
– a secondary that loses its primary can use another primary
• Modes of synchronisation: Multicast, Procedure call, Symmetric – depending on the needed accuracy

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 7Chapter 3.4: Synchronization
NTP Algorithm (Symmetric)
Client Time server
Delay: 33 ms
Delay: 17 msti,1 = 17.00.00.017ti,2 = 17.00.00.018
ti,0 = 15.00.00.000
ti,3 = 15.00.00.051
tsrc tdest
( ) ( ) ( )i ,1 i ,0 i ,3 i ,2est ii i
t t t t 2.00.00.017 1.59.59.967: 1.59.59.992
2 2 2εθ θ
− − − − −= = = = +
6i i
17 332; 10
2θ ε −−= = ⋅
Client sends requests, time server answers with current time ti,2
Client computes estimated time offset as:
where εi = difference between packet delays on forward and return pathθi = true offset of the two clocks

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 8Chapter 3.4: Synchronization
NTP Algorithm
A B
ti,0
ti,3
i ,0 i ,3t t
2
+
ti,1
ti,2
i ,1 i ,2t t
2
+
message 1
message 2
time time
θiest = estimation of
offset between A and B

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 9Chapter 3.4: Synchronization
( ) ( )
( ) ( ) ( )
i ,1 i ,3 i ,0 i ,2esti
c c S Ri ,1 i ,3 i ,0 i ,2 i i
S Ri i
i
t t t t
2
t t t t
2
2
θ
ε ε
ε εθ
− − −=
− − − + −=
−= +
NTP Algorithm
Impact of different propagation delays:
• Let tci,1 = time of receiver when message 1 was sent
→ ti,1 = tci,1 + εSi (where εS
i = propagation delay from sender to receiver)• Let tci,3 = time of receiver when message 2 was sent
→ ti,1 = tci,3 + εRi (where εR
i = propagation delay from receiver to sender)
→

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 10Chapter 3.4: Synchronization
Applicability of NTP
Problems
• Estimated time depends on packet delays, which are mostly non-symmetric → Accuracy drops in case of asymmetric routing and high network load
• Typical precision in the order of a few tens of ms (even for time servers!)
• Errors propagate through the synchronization network• Slow clock adaptation by tick adjustment of client clock counter→ Oscillations with amplitudes as high as 10 ms
Still: Sufficient accuracy for most multimedia applications ...... but not for delay measurements:
• Mean one-way delays in national WANs (e.g. GWIN) usually well below 20ms → NTP’s “long-term” accuracy not sufficient here
→ New measurement approach needed

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 11Chapter 3.4: Synchronization
One-Way Delay Measurements
• Approach:
� Delay measurement to first synchronize oscillator frequencies� Correction of timestamps by measured drift
� Subsequent estimation of clock offset• Drift influence on delays: 1000 probe packets, 10 s interdeparture delay
0 1000 2000 3000 4000 5000
0
100
200
-100
-200
cisco-rz.rz.rwth-aachen.de
Time [seconds]
Mea
sure
d dr
ift [m
s]
0 1000 2000 3000 4000 5000
40
60
80
20
0
rcs2.urz.tu-dresden.de
Time [seconds]
Mea
sure
d de
lays
[ms]
Round-Trip
Forward path
Return path

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 12Chapter 3.4: Synchronization
One-Way Delay Measurements
• Drift estimation:
� Measured latencies show clear linear behavior, errors due to delay variances� Running minimum approach to eliminate delay fluctuations
� Linear regression on first derivate yields estimator for relative drift• Running minima: minimum calculated for a window size of 50 packets (500 s)
0 1000 2000 3000 4000 5000
0
100
200
-100
-200
cisco-rz.rz.rwth-aachen.de
Time [seconds]
Mea
sure
d dr
ifts
[ms]
0 1000 2000 3000 4000 5000
30
40
50
20
10
rcs2.urz.tu-dresden.de
Time [seconds]
Mea
sure
d de
lays
[ms]
0
Round-Trip
Forward path
Return path

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 13Chapter 3.4: Synchronization
One-Way Delay Measurements
Results of drift estimation:• Aachen: Forward path: -33.93 ppm
Return path: +34.15 ppm• Dresden: Forward path: +2.001 ppm
Return path: -2.001 ppm
• Adaptation of sender or receiver timestamps possible• Correction of timestamps by mean fdrift of the two estimators, e.g. for sender:
where t0 indicates the start of the sampling period
• Goodness of estimation indicators:� Equal drift amount on both paths� First derivate of running minima is a constant function
• Several enhancements of this basic algorithm are possible
( ) ( )new newi ,o i ,0 drift i ,0 0 i ,3 i ,3 drift i ,3 0t t f t t and t t f t t= + ⋅ − = + ⋅ −
adaptation of sender times ti,0 and ti,3 by average drift

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 14Chapter 3.4: Synchronization
Estimation of clock offset:• Assumption: Equal minimum delays on both paths within sampling period
• More general than assuming equal delays for each measurement packet→ Shift of measured empirical distributions to common minimum:
• Clock offset: difference between sender and receiver clock for arbitrary packet j:
Offset at tj,3: θestj = tj,2 + estimated delay of packet j on return path
• Algorithm performs better than NTP• Drawback: Higher overhead due to more measurement packets
{ } { }new newi ,3 i ,2 i ,1 i ,0min t t min t t
New distribution offset2
− + −=
One-Way Delay Measurements

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 15Chapter 3.4: Synchronization
One-Way Delay Measurements
Results: Empirical one-way delay distributions for Aachen and Dresden
Example benefits:
• Computation of jitter distribution at the receiver (→ buffer requirements)• Detection of network bottlenecks (compare forward vs. return path to Dresden)
-5 0 5 10 15 20
0.6
0.8
1
0.4
0.2
cisco-rz.rz.rwth-aachen.de
Time [seconds]
Mea
sure
d de
lays
[ms]
00 10 20 30 40 50
0.6
0.8
1
0.4
0.2
rcs2.urz.tu-dresden.de
Time [seconds]
Mea
sure
d de
lays
[ms]
060 70
Round-Trip
Forward path
Return path

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 16Chapter 3.4: Synchronization
Quality of Service for Media Objects
Synchronization in principle also is part of QoS, related to the playout of multimedia data:• QoS specification of single Logical Data Units (LDUs), e.g.
• QoS specification concerning two related media objects:� Acceptable skew between presentation of different objects
� Production level synchronization: QoS guaranteed prior to presentation (e.g. prefetching of video frames and playback with synchronized audio)
� Human perception of synchronization
Image Video AudioColor Depth Color Depth Sampling Method
Resolution Resolution Sampling SizeFrame rate Sample rate
Jitter JitterError rate Error rate

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 17Chapter 3.4: Synchronization
Quality of Service for Media Objects
Guidelines for human perception of synchronization:
Media combination Mode, Application QoS Video / Animation Correlated ± 120 msVideo / Audio Lips synchronization ± 80 ms
Video / Image Overlay ± 240 msNon-overlay ± 500 ms
Video / Text Overlay ± 240 msNon-overlay ± 500 ms
Audio / Animation Event correlation e.g., dancing ± 80 msTightly coupled (e.g., stereo) ± 10 ms
Audio / Audio Tightly coupled (e.g., stereo) ± 10 msLoosely coupled (e.g., background music) ± 500 ms
Audio / Image Tightly coupled (e.g., music with scores) ± 5 msLoosely coupled (e.g., slide show) ± 500 ms
Audio / Text Text annotation ± 240 ms

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 18Chapter 3.4: Synchronization
QoS for Multiple Related Media Objects
Example of skew specification:
• Video with audio parallel in English and Spanish• Requirements:
1. max skew(video ahead_of audio-english): 80 ms
2. max skew(audio-english ahead_of video): 80 ms3. max skew(video ahead_of audio-spanish): 80 ms4. max skew(audio-spanish ahead_of video): 80 ms
5. max skew(audio-english ahead_of audio-spanish): 400 ms6. max skew(audio-spanish ahead_of audio-english): 400 ms
In shortened from:
1+2: V-AE ∈ [-80:80]
3+4: V-AS ∈ [-80:80]5+6: AS-AE ∈ [-400:400]
The first requirements cannot be satisfied if AS-AE ∉ [-160:160]This results in the following modification of the requirements

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 19Chapter 3.4: Synchronization
1. max skew(video ahead_of audio-english): 80 ms
2. max skew(audio-english ahead_of video): 80 ms3. max skew(video ahead_of audio-spanish): 80 ms4. max skew(audio-spanish ahead_of video): 80 ms
5. max skew(audio-english ahead_of audio-spanish): 160 ms6. max skew(audio-spanish ahead_of audio-english): 160 ms
QoS for Multiple Related Media Objects
AE-V ∈ [-80:80]V-AS ∈ [-80:80]
→ AE - AS = (AE-V) + (V-AS) ∈ [-160:160]
Modified requirements:

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 20Chapter 3.4: Synchronization
Synchronization Specification
Describes all temporal dependencies of the included objects in a multimedia environment:
• Time relations between presentation units (e.g., spacing between succeeding video frames: 40 ms)
• QoS descriptions of media objects (e.g., maximum jitter of 125 ms for audio frames)
• Time relations between different media objects(e.g., lip synchronization in an audio/video sequence: ± 80 ms)
• QoS descriptions between different media objects(e.g., maximum jitter of audio in a slide presentation: 500 ms)
→ Synchronization specification is an essential part of the description of a multimedia object!

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 21Chapter 3.4: Synchronization
Synchronization Specification
Requirements• Treatment of each media object as a single logical unit• Abstraction of the media object contents• Easy description of all types of synchronization• Integration of time-dependent and time-independent media objects• Handling of user interaction• Definition of QoS requirements• Support of hierarchical levels of synchronization (for complex scenarios)
Methods• Interval-based specification• Axes-based synchronization• Control flow-based synchronization
� Hierarchical specification� Specification via reference points� Timed Petri Networks
• Event-based synchronization• Scripts

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 22Chapter 3.4: Synchronization
Synchronization Specification Example
α: A lip synchronized audio/video sequence is shownβ: A recorded user interactionγ: 3 picturesδ: An animation which is partially audio commentedε: An interaction, e.g. a multiple choice question is shown until the user has made a selectionχ: A final picture is presented after the user has made his choice
time
A
V
RI
P1 P2 P3
AN1 AN2 AN3
A2
Interaction
P4
α
δ
ε χγβ

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 23Chapter 3.4: Synchronization
Interval-based Specification
Presentation duration is represented as interval• Basic types of temporal relations between objects:
A before B A B A meets B A B
A overlaps B A
B
A during B A
B
A starts B A
B
A finishes B A
B
A equals B A
BEnhanced interval-based method:• 29 interval relations can be specified
• 10 operations defined to handle these temporal relations(before, cobegin, coend, overlaps, while, ...)

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 24Chapter 3.4: Synchronization
Interval-based Specification
• Interval operations have one, two or three parameters• Operations with one Delay Parameter
A AA A
B B BB
δ1δ1 δ1δ1
before(δ1) beforeendof(δ1) cobegin(δ1) coend(δ1)
A AA A A
B
δ1 δ2
B
δ1δ2
B
δ1δ2
B
δ2δ1
B
δ2 δ1
while(δ1, δ2) delayed(δ1, δ2) startin(δ1, δ2) endin(δ1, δ2) cross(δ1, δ2)
• Operations with two Delay Parameters

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 25Chapter 3.4: Synchronization
Interval-based Specification
• Operation with three Delay Parameters
A
B
δ1
δ2
δ3
overlaps(δ1, δ2, δ3)
=̂
=̂=̂
A before(3) B end of A is 3 time units before the start of B
A beforeendof(7) B A starts 7 time units before end of BB while(3,5) A A starts 3 time units after start of B and ends 5 time
units after start of B

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 26Chapter 3.4: Synchronization
Interval-based Specification - Example
Audio1 cobegin(0) Video
Audio1 coend(0) Video /* i.e., Lip synchronization*/
Audio1 before(0) RecordedInteraction
RecordedInteraction before(0) Picture1
Picture1 before(0) Picture2
Picture2 before(0) Picture3
Picture3 before(0) Interaction
Picture3 before(0) Animation
Animation while(2,5) Audio2
Interaction before(0) Picture4
A2
I
P4P3P2P1
RI
A1
V
Animation
AN1 AN2 AN3

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 27Chapter 3.4: Synchronization
Interval-based Specification
Advantages:
• Easy to handle open (i.e., non-predictable) LDUs (closed LDU: predictable duration, open LDU: non-predictable duration, typical for live sources, e.g. objects which include an user interaction)→ easy to handle user interaction
• Possibility of specifying additional indeterministic temporal relations by defining intervals for durations and delays
• Disjunction of operators supported (e.g., “not parallel“)→ Flexible model that supports many run-time presentation variations
Disadvantages:• Model does not include skew specifications
• No direct specification of relations between subunits of media objects possible• Flexible specification leads to possible inconsistencies
Example: (A not in parallel with B) & (A while(2,3) User Interaction) &(User Interaction before(0) B)→ Conflict: B must be started at end of interaction, but A may still run!

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 28Chapter 3.4: Synchronization
Different possibilities:
1. Global timer: all objects attached to a global time axis2. Virtual time axis: coordinate systems with user defined measurement units;
possibly several time axes are used simultaneously, e.g. for musical notes
Axes-based Synchronization
Synchronization is based on global timing:• All objects are attached to a time axis representing an abstraction of real-time, which
is shared among all objects
• Removing one object does not affect other objects• Synchronization of objects only based on fixed points of time → very good for closed
LDUs, several problems with open LDUs
A2P4
RI
A1
VAnimation
P3P2P1
Interaction
?Time unknown!
unknown duration

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 29Chapter 3.4: Synchronization
Control Flow-based Synchronization
Basic hierarchical specification:
• Flow of concurrent presentation threads is synchronized in predefined points of the representation
• Serial and parallel synchronization of “atomic” and “compound” actions
• Atomic actions handle presentation of single-media objects, user input or delay• Compound actions are combinations of synchronization operators and atomic
actions
• Basic examples for serial and parallel presentations:
Pic. 1 Pic. 2 Pic. 3
Slide sequence
Audio Video
Lip synchronization
serial parallel

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 30Chapter 3.4: Synchronization
Control Flow-based Synchronization
Specification example:
Advantages• Easy to understand• Natural support of hierarchies
• Integration of interactive objects
Disadvantages• Synchronization only possible at the beginning or at
the end, thus a split of “Animation“ into AN1, AN2, AN3 was necessary
• Skew QoS not definable• Presentation durations must be added
• Some synchronization scenarios cannot be described
An1 An2 An3Audio2
Rec.Interaction
Pic. 1 Pic. 2 Pic. 3
Audio1 Video User Interaction
Pic. 4
other representationof previous example

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 31Chapter 3.4: Synchronization
Control Flow-based Synchronization
Synchronization via Reference Points:
• Time-dependent media objects are regarded as sequence of closed LDUs• Start and stop times of media objects: “Reference Points”
• Synchronization between objects by connecting reference points; a set of connected reference points is a “Synchronization Point”→ Approach specifies temporal relations between objects without explicit reference
to time• Example: Slide show with audio sequence (slides are control points)
Audio
Slide 1 Slide 2 Slide 3 Slide 4

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 32Chapter 3.4: Synchronization
Control Flow-based Synchronization
Problems:
• Requires mechanism for detecting inconsistencies• Does not allow specification of delays
• Possible solution: Inclusion of a global timer as a reference axis
Audio 1
Rec. Interaction
Audio 2
User Interaction
Animation
P4
Video
Animation 2
Animation 1
Animation 3
P1 P2 P3
The previous example with “Synchronization by reference points”

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 33Chapter 3.4: Synchronization
Control Flow-based Synchronization
Timed Petri Networks• Directed bipartite graph formalism for specifying state machines, dynamic extension
into the time domain
• Simple Petri Networks consist of places (circles) and transitions (bars), interconnected by directed arcs (arrows)
• Places can contain tokens (black filled circles)
• Transitions “fire“, if all input places contain tokens: Remove one token from eachinput place, add one token to each output place
• Places or transitions consume time, i.e. tokens are delayed
InputPlaceof T1
OutputPlaceof T1
Token
Transition T1
Arcs

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 34Chapter 3.4: Synchronization
Control Flow-based Synchronization
Control Flow Specification with Timed Petri Networks:
• Places represent LDUs, synchronization is modeled by transitions• Example: Lip synchronization of audio and video streams
• Petri Networks allow all kind of synchronization specifications
• Problems:� Complex specifications
� Insufficient abstraction from media contents
V1 V2 V3 V4 V5
V1 V1
11 ms 11 ms 11 ms 11 ms 11 ms
33 ms33 ms

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 35Chapter 3.4: Synchronization
Control Flow-based Synchronization
Our previous example with Petri Nets:
RI P1
P4
P2 P3A1/V
I
AN1
A2
AN2
AN3
5s
5s5s5s20s60s
Places can be refined to subnets of finer time granularity
Example:
α1 α2 α3 D
D
AN2
20 sec
0 sec
5 sec 5 sec 10 sec 0 sec
=̂

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 36Chapter 3.4: Synchronization
Event-based Synchronization
Presentations are initiated by synchronization events:• Examples: start / stop / prepare a presentation• Events that initiate representations may be external (e.g., timer-based) or internal
(e.g., media object reaching a specific LDU)• Advantage: Easy integration of interactive objects• Disadvantages:
� Difficult to handle� Complex specification
� Skew QoS cannot be defined� No hierarchies
� Maintenance very difficult
StartEvent
ObjectAudio1Stop
Timer1Ready
...
Audio1
start
start
startVideo
Pic.1 start
start(3)Timer1
Pic.2
action

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 37Chapter 3.4: Synchronization
Scripts
• Elements: Activities and subscripts• Often: Full programming language, extended by timing operations
• Different specification methods can be supported• Example:
� Script based on basic hierarchical method, which supports serial (“>>“-operator), parallel (“&“-operator) and repeated presentation (“n“ denotes n-fold repetition):
• 3Pictures = Picture1.Duration(5) >> Picture2.Duration(5) >> Picture3.Duration(5)• AA = Animation & Audio2.Delayed(2)
Definition of activities:activity DigAudio Audio(„video.au“);
activity SMP Video(„video.smp“);
activity Xrecorder Record(„window.rec“);
activity Picture Picture1(„picture1.jpeg“);
...
activity StartInteraction Selection;
activity RTAnima Animation(„animation.ani“);
Script:script Lipsynch AV = Audio&Video;
script Multimedia Example {
AV >>
Record >>
3Pictures >>
((UserInteraction>>Picture4)&AA)
}

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 38Chapter 3.4: Synchronization
Scripts
Advantages:
• Powerful and flexible programming environment• Support of hierarchies and logical objects
• Easy integration of time-independent and interactive objects
Disadvantages:
• Difficult to handle: Procedural approach instead of declarative• Complex specification
• Implicit usage of common timers necessary• Special constructs for skew QoS necessary

Lehrstuhl für Informatik 4
Kommunikation und verteilte Systeme
Page 39Chapter 3.4: Synchronization
Conclusions
Synchronization specification methods:
• Different specification capabilities and differing user friendliness• Proposed methods are just different “views” of the same problem
• Selection of a method depends on target application and environment, there is no best or worst solution
Examples:
• Simple presentations without user interaction: Global timer seems best solution (but requires exact clock synchronization!)
• Complex structure with interaction: Reference point models more suitable
→ Different standards use different specification methods