Embed Size (px)
DESCRIPTION
Chapter 13. Periodic Motion. Dr. Yousef Abou-Ali [email protected]. Syllabus. 13.1 Describing Oscillation 13.2 Simple Harmonic Motion 13.3 Energy in Simple Harmonic Motion 13.4 Applications of Simple Harmonic Motion 13.5 The Simple Pendulum. Dr. Y. Abou-Ali, IUST. - PowerPoint PPT Presentation
Citation preview

University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
Syllabus
13.1 Describing Oscillation
13.2 Simple Harmonic Motion
13.3 Energy in Simple Harmonic Motion
13.4 Applications of Simple Harmonic Motion
13.5 The Simple Pendulum

Goals for Chapter 13
To follow periodic motion to study simple harmonic motion. To use the pendulum as a prototypical system undergoing simple harmonic motion.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

Introduction
• Many kinds of motion repeat themselves over and over: the vibration of a quartz crystal in a watch, the swinging pendulum of a grandfather clock, and the back-and-forth motion of the pistons in a
car engine.
• Understanding periodic motion will be essential for later study of waves, sound, and light.
• We call this periodic Motion or Oscillation, and it’s the subject of
this chapter.
• Body undergoes periodic motion always has a stable equilibrium position. When moves away from this position and released, Force pull it back toward equilibrium.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.1 Describing Oscillation
• One of the simplest system that can have periodic motion is shown
in figure bellow.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.1 Describing Oscillation
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.1 Describing Oscillation
• The spring force is the only horizontal force acting on the body;
the vertical normal and gravitational forces always add to zero.
• The quantities x, vx, ax, and Fx refer to the x-components of the
position, velocity, acceleration, and the force vectors, respectively. • In our coordinate system, the origin O is at the equilibrium
position, where the spring neither stretched or compressed.
• Then x is the x-component of the displacement of the body from
equilibrium and is also the change in the length of the spring.
• Then x-component of acceleration is given by ax = Fx/m.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.1 Describing Oscillation
• Whenever the body is displaced from its equilibrium position, the
spring force tends to restore it to the equilibrium position.
• We call a force with this character a restoring force.
• Oscillation can occur only when there is a restoring force tending
to return the system to equilibrium.
• If we displace the body to the right to x = A and then let it go, the
net force and the acceleration to the left.
• The speed increases as the body approaches the equilibrium
position O. University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.1 Describing Oscillation
• When the body is at O, the net force acting it is zero, but because
of its motion it overshoots the equilibrium position.
• On the other side of the equilibrium position the velocity to the left but the acceleration is to the right; the speed decreases until the
body comes to a stop.
• The body is oscillating! If there is no friction or other force to remove mechanical energy from the system, this motion repeat itself
forever.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.1 Describing Oscillation
• Here are some terms that we will use in discussing periodic motion
of all kinds: • The amplitude of the motion, denoted by A, is the maximum magnitude of displacement from equilibrium – that is, the maximum
value of |x|. It is always positive. The SI unit of A is meter.
• The period, T, is the time of one cycle. It is always positive. The SI
unit is second. • The frequency, f, is the number of cycles in a unit of time. It is
always positive. The SI unit is hertz.
1 hertz = 1 Hz = 1 cycle/s = 1 s-1
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.1 Describing Oscillation
• The angular frequency, ω, is 2π times the frequency, its unit is
rad/s:
• From the definitions of period T and frequency f,
2 f
(relationships between frequency and period)
1 1f TT f
(13.1)&
• Also from the definition of ω, 2
2 fT
(angular frequency) (13.2)
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.1 Describing Oscillation
An ultrasonic transducer (a kind of loudspeaker) used for medical diagnosis oscillators at a frequency of 6.7 MHz = 6.7 × 106 Hz. How much time does oscillation take, and what is the angular frequency?
• Identify and Set Up: Our target variables are the period T and the
angular frequency ω. We can use Eqs. (13.1) & (13.2).
• Execute: From Eqs. (13.1) & (13.2),
Example 13.1 ( Period, frequency, and angular frequency):
Solution:
76
1 11 5 10 s = 0.15 s
6 7 10 HzT
f
.
.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.1 Describing Oscillation
6
6
7
2 2 ( 6 7 10 Hz)
(2 rad cycle)(6 7 10 cycle s)
4 2 10 rad s
f
.
/ . /
. /
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.2 Simple Harmonic Motion
• The simplest kind of oscillation occur when the restoring force Fx
is directly proportional to the displacement from equilibrium x.
• This happens if the spring is an ideal one that obeys Hooke’s law. • The constant of proportionality between Fx and x is the force
constant k.
• On either side of the equilibrium position, Fx and x have opposite
signs. The x-component of force Fx on the body is:
xF k x(restoring force exerted by an ideal spring) (13.3)
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.2 Simple Harmonic Motion
• Last equation gives the correct magnitude and sign of the force,
whether x is positive, negative, or zero.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• The force constant is always positive and has unit of N/m. • When the restoring force is directly proportional to the displacement from equilibrium, as given by Eq. (13.3), the oscillation is called
simple harmonic motion, SHM.
• The acceleration ax = d2x/dt2 = Fx/m of a body in SHM is given by 2
2xd x k
a xmdt
(simple harmonic motion) (13.4)
This acceleration is not constant

13.2 Simple Harmonic Motion
• A body that undergoes simple harmonic motion is called a
harmonic oscillator.
• Keep in mind that not all periodic motion are simple harmonic.
Equation of Simple Harmonic Motion
k
m (simple harmonic motion) (13.10)
• The angular frequency of SHM,
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.2 Simple Harmonic Motion
1
2 2
kf
m
(simple harmonic motion) (13.11)
• The frequency f and period T are,
1 22
mT
f k
(simple harmonic motion) (13.12)
• From Eq. (13.12) a large mass m, with its greater inertia, will have less acceleration, move more slowly, and take a longer time to a
complete cycle. University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.2 Simple Harmonic Motion
A spring is mounted horizontally, with its left end held stationary. By attaching a spring balance to the free end and pulling toward the right, figure below, we determine that the stretching force is proportional to the displacement and that a force 6.0 N causes a displacement of 0.030 m. We remove the spring balance and attach a 0.50-kg body to the end, pull it a distance of 0.020 m, release it, and watch it oscillate. a) Find the force constant of the spring. b) Find
the angular frequency, frequency, and period of the oscillation.
Example 13.2 (Angular frequency, frequency, and period in SHM):
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
Solution:
• Identify: Because the spring force is proportional to the
displacement, the motion is SH.

13.2 Simple Harmonic Motion
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.2 Simple Harmonic Motion
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• Set Up: We use the value of force constant k using Hooke’s law,
Eq. (13.3), and ω, f, and T using Eqs. (13.10), (13.11), and (13.12).
• Execute: a) When x = 0.030 m, the force the spring exerts on the
spring balance is Fx = - 6.0 N. From Eq. (13.3),
26 0 N200 N m 200 kg s
0 030 mxFkx
./ /
.
b) Using m = 0.50 kg in Eq. (13.10), we find:
2200kg s20 rad s
0 50kg
k
m
//
.

13.2 Simple Harmonic Motion
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
The frequency f is:
20 rad s3 2 cycle s 3 2 Hz
2 2 rad cyclef
/
. / ./
The period T is: 1 1
0 31s3 2 cycle s
Tf
.. /

13.2 Simple Harmonic Motion
Displacement, Velocity, and acceleration in SHM
• We will find the displacement x as a function of time for a
harmonic oscillation.
cos( )x A t (displacement in SHM) (13.13)
• The constant Ø in Eq. (13.13) is called phase angle. University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.2 Simple Harmonic Motion
• We denote the position at t = 0 by xo. Putting t = 0 and x = xo in Eq.
(13.13), we get
sin ( )xdx
v A tdt
(velocity in SHM) (13.15)
o cosx A (13.14)
• To find the velocity vx and acceleration ax as a function of t for a
harmonic oscillator taking derivatives of Eq. (13.13) with respect to t
22
2cos(
)xx
dv d xa A t
dt dt (13.16)
(acceleration in SH ) MUniversity Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.2 Simple Harmonic Motion
• The velocity vx oscillate between vmax= + ωA and – vmax= - ωA.
• Comparing Eq. (13.16) with Eq. (13.13) and recalling that ω2 = k/m
from Eq. (13.10), we see that
2x
ka x x
m
• When the body is passing through the equilibrium position so that the displacement is zero, the velocity equals either vmax or –vmax (depending on which way the body is moving) and the acceleration is
zero. University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• The acceleration ax oscillate between amax= +ω2A and - amax= -ω2A.

13.2 Simple Harmonic Motion
• When the body is at either its maximum positive displacement, x = +A, or its maximum negative displacement, x = -A, the velocity is zero and the body is at instantaneously at rest.
• At these points, the restoring force Fx= - kx and the acceleration of
the body have their maximum magnitudes.
• At x = +A the acceleration is negative and equal to – amax. At x = -A
the acceleration is positive ax= + amax.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• If we are given the initial position xo and initial velocity vox for the oscillating body, we can determine the amplitude A and the phase angle Ø.

13.2 Simple Harmonic Motion
• The initial velocity vox is the velocity at time t = 0; putting vx = vox
and t = 0 in Eq. (13.15), we find:
• To find Ø, divide Eq. (13.17) by Eq. (13.14). This eliminates A and
gives an equation that we can solve for Ø:
o sinxv A (13.17)
o
o
sintan
cosxv A
x A
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
o
o
arctan xv
x
(phase angle in SHM) (13.18)

13.2 Simple Harmonic Motion
• The amplitude A is:
2o2o
2 xvA x
(13.19)
(amplitude in SHM)
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• Graphs from a particle undergoing simple harmonic motion.

13.2 Simple Harmonic Motion
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
Example 13.3 (Describing SHM):
Let’s return to the system of mass and horizontal spring we considered in Example 13.2, with k = 200 N/m and m = 0.50 kg. This time we give the body an initial displacement of +0.015 m and an initial velocity of +0.40 m/s a) Find the period, amplitude, and phase angle of the motion. b) Write equations for the displacement,
velocity, and acceleration as function of time. Solution:
• Identify: The oscillations are SHM. • Set Up: We are given the values of k, m, xo, vox, from them, we calculate T, A, and Ø and the expression for x, vx, and ax as function
of time.

13.2 Simple Harmonic Motion
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• Execute: a) The period is exactly the same as in Example 13.2, T = 0.31 s. In SHM the period does not depend on the amplitude,
only on the values of k and m. In Example 13.2 we found that ω = 20 rad/s. So from Eq. (13.19).
oo
22
2xvA x
22
2(0 40 m/s)
(0 015 m)(20 rad/s)
.
.
0 025 m .

13.2 Simple Harmonic Motion
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
To find the phase angle Ø, we use Eq. (13.18).
o
o
arctan xv
x
o0 40 m/sarctan 53 0 93 rad
(20 rad/s)(0 015 m)
..
.
b) The displacement, velocity, and acceleration at any time are given by Eqs (13.13), (13.15), and (13.16), respectively. Substituting the
values, we get:
(0 025 m)cos[( 20 rad/s) 0 93 rad]x t . .

13.2 Simple Harmonic Motion
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
(0 50 m/s)sin[( 20 rad/s) 0 93 rad]xv t . .
2(10 m/s )cos[( 20 rad/s) 0 93 rad]xa t .

13.3 Energy in Simple Harmonic Motion
• Take another look at the body oscillating on the end of a spring in Fig. 13.1.
• The spring force is the only horizontal force on the body.
• The kinetic energy of the body is K = ½ m v2 and the potential
energy of the spring is U = ½ k x2.
• The force exerted by an ideal spring is a conservative force, and the vertical forces do no work, so the total mechanical energy of the system is conserved. We assume that the mass of the spring itself is
negligible.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• There are no nonconservative forces that do work, so the total mechanical energy E = K + U is conserved:

13.3 Energy in Simple Harmonic Motion
Since the motion is one-dimensional, v2 = vx2.
• When x = A (or –A), vx= 0. At this point the energy is entirely
potential, and E = ½ k A2.
• The total mechanical energy E is also directly related to the
amplitude A.
• Because E is constant, this quantity equals E at any other point.
Combining this expression with Eq. (13.20), we get
2 21 1 constant2 2xE mv k x (13.20)
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
2 2 21 1 12 2 2
constantxE mv k x k A (13.21)
(total mechanical energy in SHM)

13.3 Energy in Simple Harmonic Motion
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• We can use Eq. (13.21) to solve for velocity vx of the body at a
given displacement x:

13.3 Energy in Simple Harmonic Motion
• The ± sign means that at a given value of x the body can be moving
in either direction.
2 2x
kv A x
m (13.22)
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• When x = ± A/2, 22
23
4A
xk k
v A Am m
• Eq. (13.22) also shows that the maximum speed vmax occurs at x
= 0. Using Eq. (13.10), we find that:

13.3 Energy in Simple Harmonic Motion
maxk
v A Am
(13.23)
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

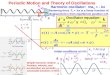
13.3 Energy in Simple Harmonic Motion
+A
Kinetic energy
O-A
Potential energy
Total energy
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.3 Energy in Simple Harmonic Motion
Example 13.4 (Velocity, acceleration, and energy in SHM):
In the oscillation described in Example 13.2, k = 200 N/m, m = 0.50 kg, and the oscillating mass is released from rest at x = 0.020 m. a) Find the maximum and minimum velocities attained by the oscillating body. b) Compute the maximum acceleration. c) Determine the velocity and acceleration when the body has moved halfway to the centre from its original position. d) Find the total energy, potential
energy, and kinetic energy at this position.
Solution:
• Identify: The problem refers to the motion at various positions in
the motion, not at specified times. We can use the energy relations.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.3 Energy in Simple Harmonic Motion
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.3 Energy in Simple Harmonic Motion
• Set Up: For any position x we use Eqs. (13.22) and (13.14) to find the velocity vx and acceleration ax. Given the velocity and position,
we use Eq. (13.21) to find the energy quantities K, U, and E. • Execute: a) The velocity vx at any displacement x is given by
Eq. (13.22): 2 2
xk
v A xm
The maximum velocity occurs when the body is moving to the
right through the equilibrium position, where x = 0:
max200 N/m
(0 020m) 0 40m/s0 50 kgx
kv v A
m . .
.University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.3 Energy in Simple Harmonic Motion
The minimum (i.e., most negative) velocity occurs when the body is
moving to the left through x = 0; its value is – vmax = - 0.40 m/s.
b) From Eq. (13.4),
xk
a xm
The maximum (most positive) acceleration occurs at the most
negative value of x, x = - A; therefore,
2max
200 N m( ) ( 0 020m) 8 0m/s
0 50kg
ka A
m
/. .
. The minimum (most negative) acceleration is - 8.0 m/s2, occurring at x = + A = + 0.020 m.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.3 Energy in Simple Harmonic Motion
c) At a point halfway to the centre form the initial position, x = A/2 =
0.010 m. From Eq. (13.22),
We choose the negative square root because the body is moving from x = A toward x = 0. From Eq. (13.4),
2 2200 N/m(0 020m) (0 010m) 0 35m/s
0 50kgxv . . ..
2200 N/m(0 010m) 4 0m/s
0 50kgxa . ..
At this point the velocity and the acceleration have the same sign, so the speed is increasing.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.3 Energy in Simple Harmonic Motion
d) The total energy has the same value at all points during the
motion:
The potential energy is:
2 21 12 2
(200 N m)(0 020m) 0 040JE k A / . .
and the kinetic energy is:
2 21 12 2
(200 N/m)(0 010m) 0 010JU k x . .
2 21 12 2
(0 50 )( 0 35m/s) 0 030JxK mv kg . . .
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.4 Applications of SHM
• We have looked at one situation in which simple harmonic motion
occurs: a body attached to an ideal horizontal spring.
• But SHM can occur in any system in which there is a restoring force that is directly proportional to the displacement from
equilibrium.
Vertical SHM
• Suppose we hang a spring with force constant k (figure below) and suspend from it a body with mass m. Oscillations will now be
vertical; will they still be SHM?
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.4 Applications of SHMVertical SHM
• In the figure below (b) the body hangs at rest, in equilibrium
l
(a)
Object in equilibrium:
(spring force) = (weight force)
x = 0
mg
F = k Δl
l
Δl
mg
F = k (Δl – x)
x
l
Δl - x
(b)
(c)
Object displaced from equilibrium: net force is proportional to displacement, oscillations are SHM
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.4 Applications of SHMVertical SHM
• In this position the spring is stretched an amount Δl just great enough that the spring’s upward vertical force k Δl on the body
balances its weight mg:
k mg • Take x = 0 to be this equilibrium position and take the positive
x- direction to be upward. • When the body is a distance x above its equilibrium position
(figure c), the extension of the spring is Δl – x. • The upward force it exerts on the body is then k (Δl – x), and the
net x-component of force on the body is: University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.4 Applications of SHM
Vertical SHM
net ( ) ( )F k x mg k x
• That is, a net downward force of magnitude kx.
• Similarly, when the body is below the equilibrium position, there is a net upward with magnitude kx.
• In either case there is a restoring force with magnitude kx.
• If the body is set in vertical motion, it oscillates in SHM, with
angular frequency ω = (k/m) 1/2.
• Vertical SHM does not differ in any way from horizontal SHM. University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.4 Applications of SHMVertical SHM
• The only real change is that the equilibrium position x = 0 no longer corresponds to the point at which the spring is unstretched.
• The same ideas hold if a body with weight mg is placed atop a compressed spring and a compresses it a a distance Δl.
Example 13.6 (Vertical SHM in an old car):
The shock absorbers in an old car with mass 1000 kg are completely worn out. When a 980-N person climbs slowly into the car to its centre of gravity, the car sinks 2.8 cm. When the car, with the person aboard, hits a bump, the car starts oscillating up and down in SHM. Model the car and person as a single body on a single spring, and
find the period and the frequency of the oscillation. University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.4 Applications of SHM
Vertical SHM
Solution:
• Identify and Set Up: The situation is like that shown in figure below.
Δl
mg
F
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.4 Applications of SHM
Vertical SHM
• Execute: When the force increases by 980 N, the spring compresses an additional 0.028 m, and the coordinate x of the car changes by
– 0.028 m. Hence the effective force constant (including the effect of the entire suspension) is:
4 2980 N3 5 10 kg/s
0 028 mxFkx
..
The person’s mass is w/g = (980 N)/(9.8 m/s2) = 100 kg. The total oscillating mass is m = 1000 kg + 100 kg = 1100 kg. The period T is:
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.4 Applications of SHM
Vertical SHM
4 21100kg
2 2 1 11s3 5 10 kg/s
mT
k
.
.
1 10 90Hz
1 11sfT
..
and the frequency is:
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.5 The Simple Pendulum
A simple pendulum is an idealized model consisting of a point
mass suspended by a massless, unstretchable string.
• When the point mass is pulled to one side of its straight-down equilibrium position and released, it oscillates about the equilibrium position.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST

13.5 The Simple Pendulum
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• The pendulum is a good example of harmonic motion.
• Oscillations depend on the length of the pendulum, the gravitational restoring force BUT not the mass.

13.5 The Simple Pendulum
• The path of the point mass (sometimes called a pendulum bob) is not a straight line but the arc of a circle with radius L equal the
length of the string (figure above). • If the motion is simple harmonic, the restoring force must be directly proportional to x or (because x = Lθ) to θ. Is it?
• In the figure above we represent the forces on the mass in terms of tangential and radial components.
• The restoring force Fθ is the tangential component of the net force:
sinF mg (13.30)
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• The restoring force is provided by gravity; the tension T merely
acts to make the point mass move in an arc.

13.5 The Simple Pendulum
• The restoring force in proportional not to θ but to sin θ, so the motion in not simple harmonic.
• If the angle θ is small, sin θ is very nearly equal to θ in radian. For example, when θ = 0.1 rad (about 6o), sin θ = 0.0998.
• A difference of only 0.20%. With this approximation, Eq. (13.30) becomes:
xF mg mg
L , or
mgF x
L (13.31)
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• The restoring force is then proportional to the coordinate for small
displacements, and the force constant k = mg/L.

13.5 The Simple Pendulum
• From Eq. (13.10) the angular frequency ω of a simple pendulum with small amplitude is:
• The corresponding frequency and period relations are:
k mg L g
m m L (simple pendulum, small amplitude) (13.32)
/
1
2 2
gf
L
(simple pendulum, small amplitude) (13.33)
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
2 2 1
L
Tf g
(simple pendulum, small amplitude) (13.34)

13.5 The Simple Pendulum
Example 13.8 (A simple Pendulum):
Find the period and frequency of a simple pendulum 1.000 m long at
a location where g = 9.800 m/s2. Solution:
• Identify and Set Up: We use Eq. (13.34) to determine the period T of the pendulum from its length, and Eq. (13. 1) to find the
frequency f from T.
University Physics, Chapter 13Dr. Y. Abou-Ali, IUST
• Execute: From Eqs. (13.34) and (13.1),
21 000m 1
2 2 2 007s & 0 4982 Hz9 800m/s
LT f
g T
.. .
.