1Overview of Control System Design Chapter 131. Safety.It is
imperative that industrial plants operate safely so as to promote
the well-being of people and equipment within the plant and in the
nearby communities. Thus, plant safety is always the most important
control objective and is the subject of Section 1.!.2.
Environmental Regulations.Industrial plants must comply with
environmental regulations concerning the discharge of gases,
liquids, and solids beyond the plant boundaries.3. Product
Specifications and Production Rate.In order to be profitable, a
plant must ma"e products that meet specifications concerning
product quality and production rate.General Requirements#Chapter
134. Economic Plant Operation.It is an economic reality that the
plant operation over long periods of time must be profitable. Thus,
the control objectives must be consistent with the economic
objectives. 5. Stable Plant Operation. The control system should
facilitate smooth, stable plant operation without e$cessive
oscillation in "ey process variables. Thus, it is desirable to have
smooth, rapid set-point changes and rapid recovery from plant
disturbances such as changes in feed composition.%Chapter 13Steps
in Control System Design&fter the control objectives have been
formulated, the control system can be designed. The design
procedure consists of three main steps'1. Select controlled,
manipulated, and measured variables.#. (hoose the control strategy
)multiloop control vs. multivariable control* and the control
structure )e.g., pairing of controlled and manipulated
variables*.%. Specify controller settings.+Control
Strategies,Multiloop Control:-ach output variable is controlled
using a single input variable.,Multivariable Control:-ach output
variable is controlled using more than one input variable.Chapter
13!Chapter 13, The degrees of freedom ! is the number or process
variables that must be specified in order to be able to determine
the remaining process variables. , If a dynamic model of the
process is available, ! can be determined from a relation that was
introduced in (hapter #,)1%-1*! " E = where " is the total number
of process variables, and E is the number of independent
equations.13.1Degrees of ree!om for "ro#ess Control,The important
concept of degrees of freedom was introduced in Section #.%, in
connection with process modeling..Chapter 13/or process control
applications, it is very important to determine the ma$imum number
of process variables that can be independently controlled, that is,
to determine the control degrees of freedom, !#', In order to ma"e
a clear distinction between ! and !#, we will refer to ! as the
model degrees of freedom and !# as the control degrees of freedom.
, 0ote that ! and !# are related by the following
equation,Definition. The control degrees of freedom, !#, is the
number of process variables )e.g., temperatures, levels, flow
rates, compositions* that can be independently controlled.)1%-#*!
!# $ = +where $ is the number of disturbance variables )i.e., input
variables that cannot be manipulated.*1Chapter 13Example
13.1General Rule. /or many practical control problems, the control
degrees of freedom !# is equal to the number of independent
material and energy streams that can be manipulated.2etermine ! and
!# for the steam-heated, stirred-tan" system modeled by -qs. #-! 3
#-!# in (hapter #. &ssume that only the steam pressure Ps can
be manipulated.SolutionIn order to calculate ! from -q. 1%-1, we
need to determine " and E. The dynamic model in -qs. 2-50 2-52
contains three equations )E 4 %* and si$ process variables )" 4 .*'
%s, Ps, &, %i, %, and %&. Thus, ! 4 . 3 % 4 %. 5Chapter
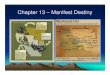
13/igure 1%.1 Two e$amples where all three process streams cannot
be manipulated independently.6Stirre!$%an& 'eating
"ro#ess/igure #.% Stirred-tan" heating process with constant
holdup, ".Chapter 131Chapter 13, If the feed temperature %i and
mass flow rate & are considered to be disturbance variables, $
4 # and thus !# 4 1 from -q. )1%-#*. ,It would be reasonable to use
this single degree of freedom to control temperature % by
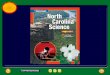
manipulating steam pressure, Ps.The blending system in /ig. 1%.%
has a bypass stream that allows a fraction f of inlet stream to
bypass the stirred tan". It is proposed that product composition '
be controlled by adjusting f via the control valve. &naly7e the
feasibility of this control scheme by considering its steady-state
and dynamic characteristics. In your analysis, assume that '1 is
the principal disturbance and that '#, &1, and are constant.
8ariations in the volume of liquid in the tan" can be neglected
because 99 &1. Example 13.211Chapter 13/igure 1%.%. :lending
system with bypass line.1#Chapter 13Solution,The dynamic
characteristics of the proposed control scheme are quite favorable
because the product composition ' responds rapidly to a change in
the bypass flow rate. ,In order to evaluate the steady-state
characteristics, consider a component balance over the entire
system'Solving for the controlled variable gives,1 1 # #)1%-%*
& ' & ' &' + =1 1 # #)1%-+*& ' & ''&+=,Thus
depends on the value of the disturbance variable and four constants
)&1, , '#, and &*. ,:ut it does not depend on the bypass
function, f. '1'1%Chapter 13,Thus, it is not possible to compensate
for sustained disturbances in '1 by adjusting f. ,/or this reason,
the proposed control scheme is not feasible.,:ecause f does not
appear in )1%-+*, the steady-state gain between ' and f is 7ero.
Thus, although the bypass flow rate can be adjusted, it does not
provide a control degree of freedom. , ;owever, if could also be
adjusted, then manipulating both f and could produce e$cellent
control of the product composition.1+Chapter 13(ffe#t of
ee!ba#& Control,0e$t we consider the effect of feedbac" control
on the control degrees of freedom. ,In general, adding a feedbac"
controller )e.g.,