Embed Size (px)
Citation preview
Copyright © 2010 Pearson Education, Inc.
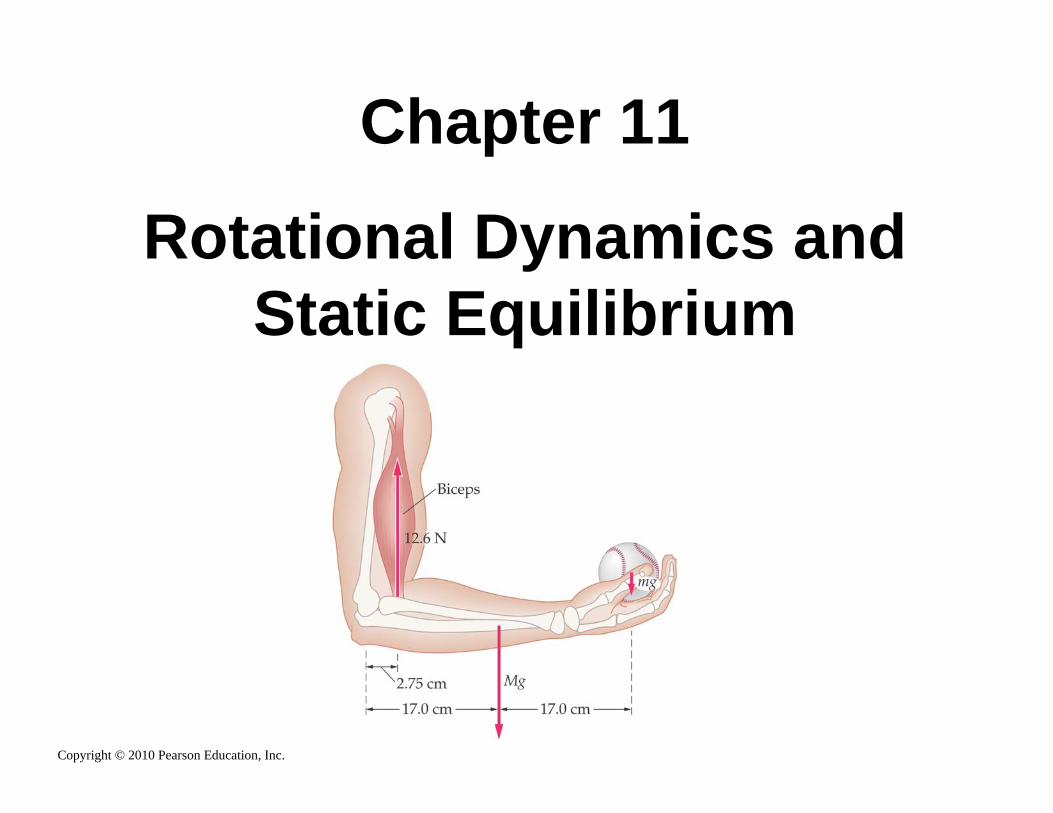
Chapter 11
Rotational Dynamics and Static Equilibrium
Copyright © 2010 Pearson Education, Inc.
Units of Chapter 11• Torque
• Torque and Angular Acceleration
• Zero Torque and Static Equilibrium
• Center of Mass and Balance
• Dynamic Applications of Torque
• Angular Momentum
• Conservation of Angular Momentum
• Rotational Work and Power
• The Vector Nature of Rotational Motion

Copyright © 2010 Pearson Education, Inc.
Review: 11-1 Torque
Only the tangential component of force causes a torque:

Copyright © 2010 Pearson Education, Inc.
Review: 11-1 Torque
This leads to a more general definition of torque:

Copyright © 2010 Pearson Education, Inc.
Review: 11-2 Torque and Angular Acceleration
Once again, we have analogies between linear and angular motion:

Copyright © 2010 Pearson Education, Inc.
11-3 Zero Torque and Static Equilibrium
Static equilibrium occurs when an object is at rest – neither rotating nor translating.
Copyright © 2010 Pearson Education, Inc.
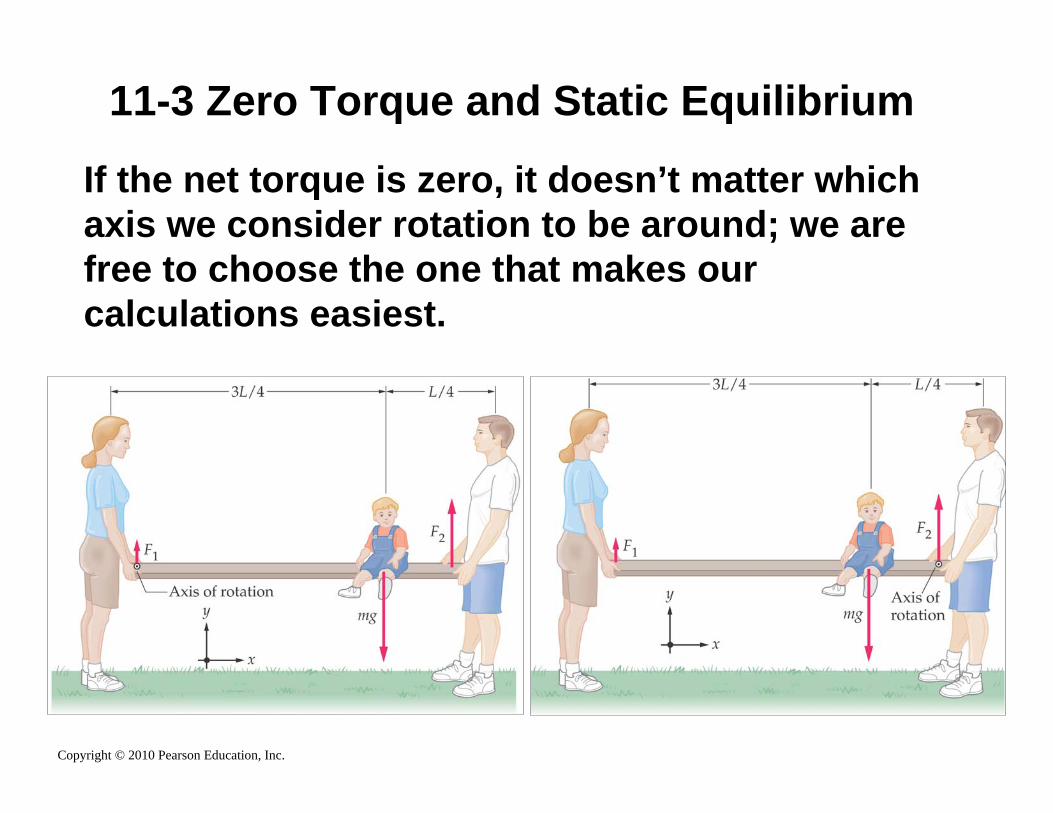
11-3 Zero Torque and Static Equilibrium
If the net torque is zero, it doesn’t matter which axis we consider rotation to be around; we are free to choose the one that makes our calculations easiest.
Copyright © 2010 Pearson Education, Inc.
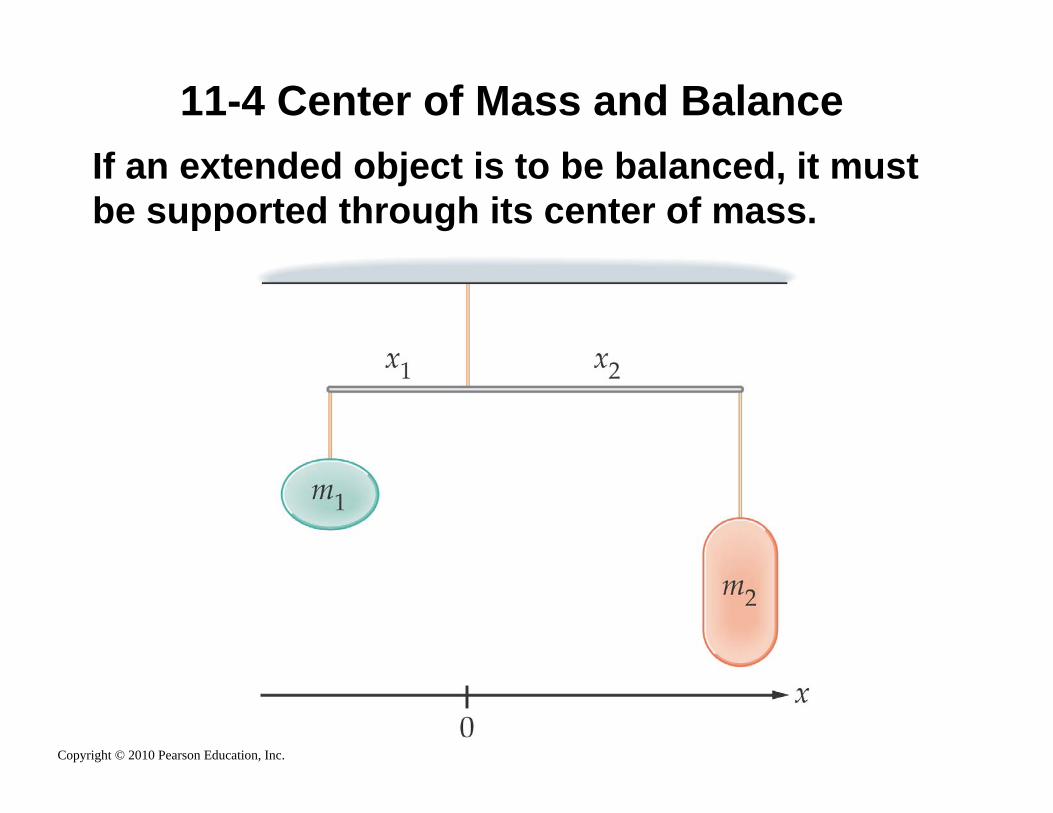
11-4 Center of Mass and BalanceIf an extended object is to be balanced, it must be supported through its center of mass.
Copyright © 2010 Pearson Education, Inc.
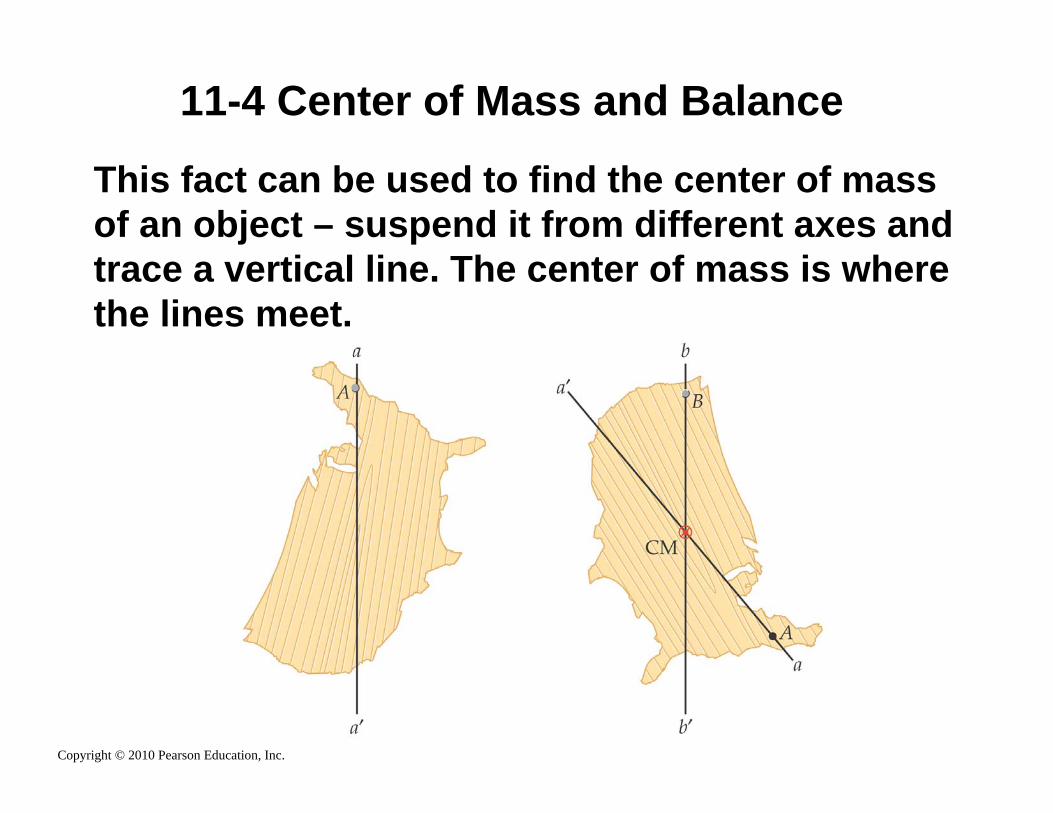
11-4 Center of Mass and Balance
This fact can be used to find the center of mass of an object – suspend it from different axes and trace a vertical line. The center of mass is where the lines meet.
Question 11.10Question 11.10 Balancing RodBalancing Rod
1kg
1m
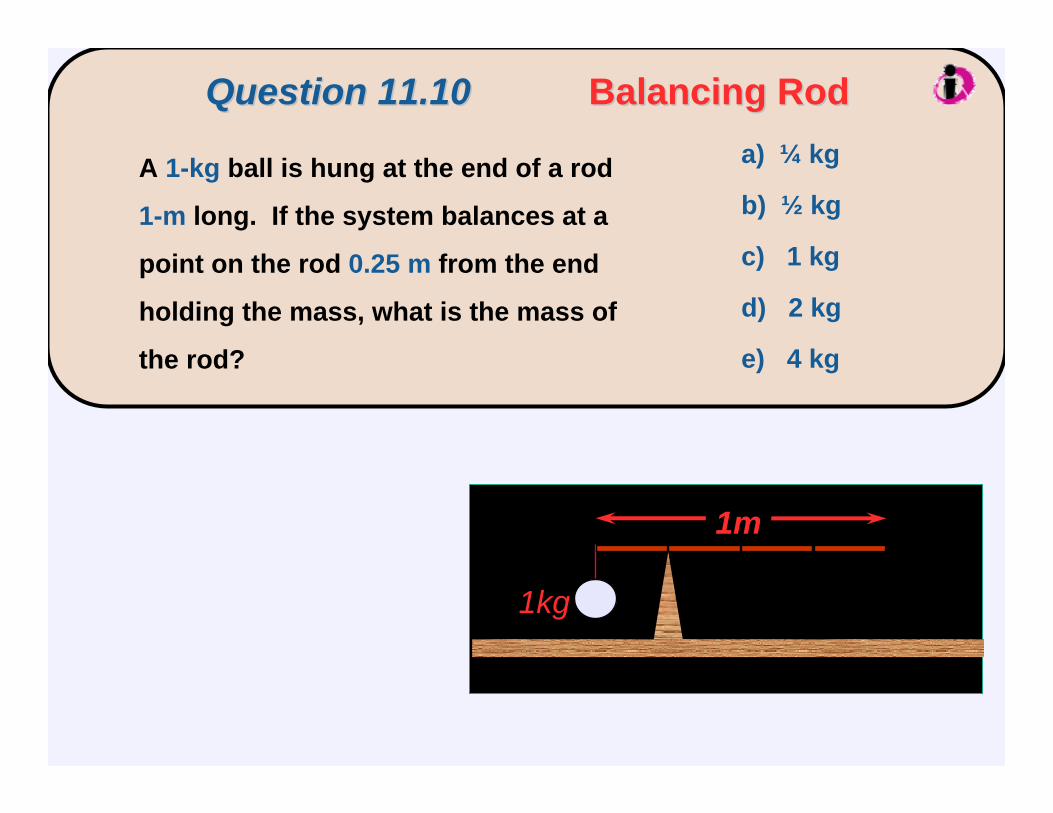
A 1-kg ball is hung at the end of a rod
1-m long. If the system balances at a
point on the rod 0.25 m from the end
holding the mass, what is the mass of
the rod?
a) ¼ kg
b) ½ kg
c) 1 kg
d) 2 kg
e) 4 kg

1 kg
XCM of rod
same distance mROD = 1 kg
A 1-kg ball is hung at the end of a rod
1-m long. If the system balances at a
point on the rod 0.25 m from the end
holding the mass, what is the mass of
the rod?
The total torque about the pivot The total torque about the pivot must be zero !!must be zero !! The CM of the rod is at its center, 0.25 m to the 0.25 m to the right of the pivotright of the pivot. Because this must balance the ball, which is the same distance to the left of same distance to the left of the pivotthe pivot, the masses must be the same !!
a) ¼ kg
b) ½ kg
c) 1 kg
d) 2 kg
e) 4 kg
Question 11.10Question 11.10 Balancing RodBalancing Rod

Question 11.12aQuestion 11.12a Tipping Over ITipping Over I
1 2 3
a) all
b) 1 only
c) 2 only
d) 3 only
e) 2 and 3
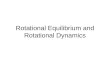
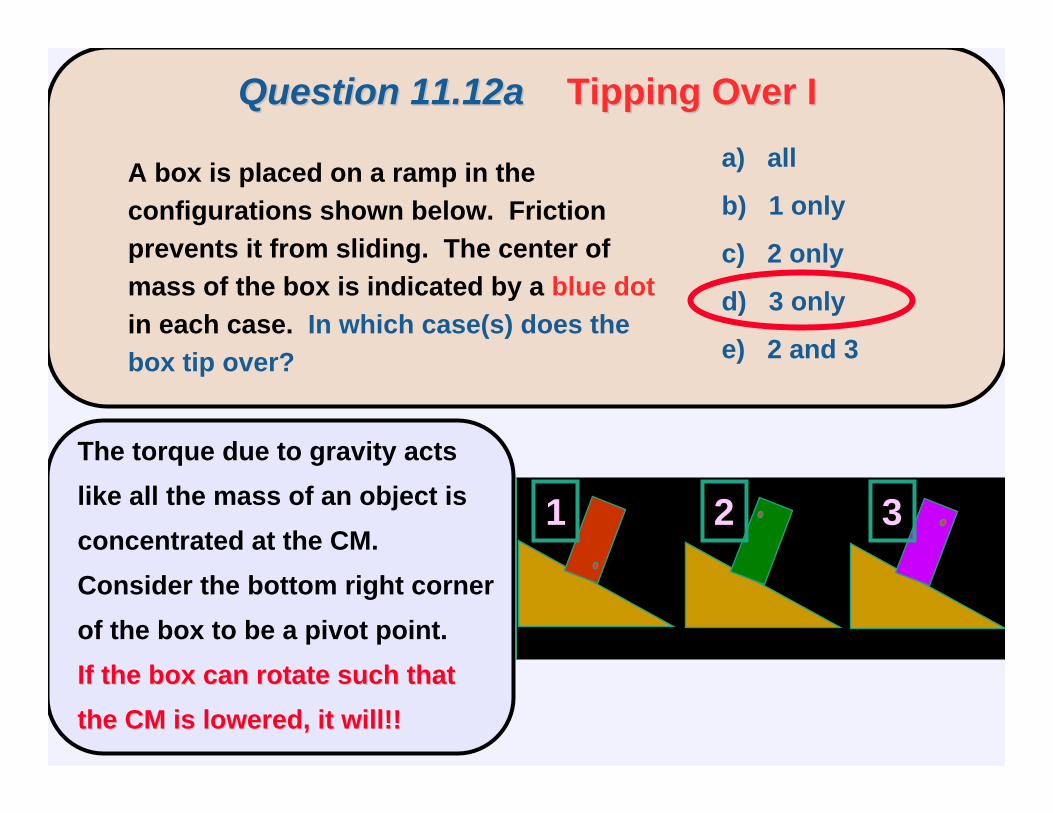
A box is placed on a ramp in the configurations shown below. Friction prevents it from sliding. The center of mass of the box is indicated by a blue dotin each case. In which case(s) does the box tip over?
Question 11.12aQuestion 11.12a Tipping Over ITipping Over I
1 2 3
a) all
b) 1 only
c) 2 only
d) 3 only
e) 2 and 3
A box is placed on a ramp in the configurations shown below. Friction prevents it from sliding. The center of mass of the box is indicated by a blue dotin each case. In which case(s) does the box tip over?
The torque due to gravity acts like all the mass of an object is concentrated at the CM. Consider the bottom right corner of the box to be a pivot point. If the box can rotate such that If the box can rotate such that the CM is lowered, it will!!the CM is lowered, it will!!
Copyright © 2010 Pearson Education, Inc.
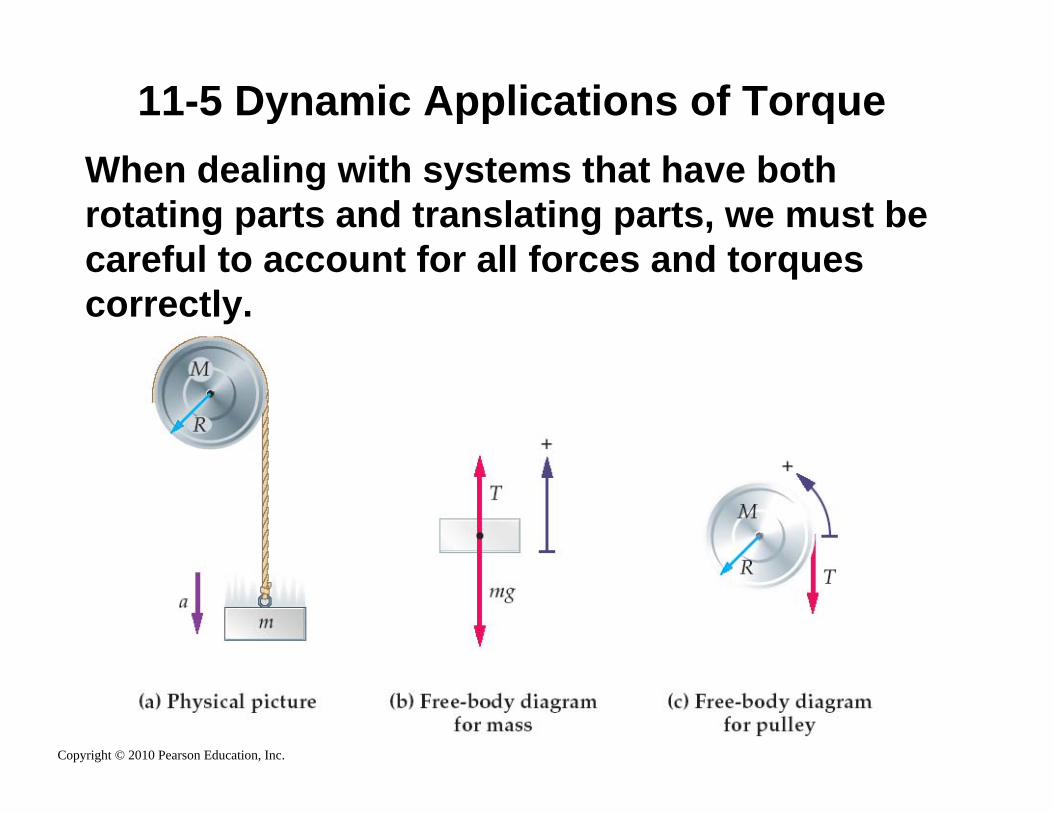
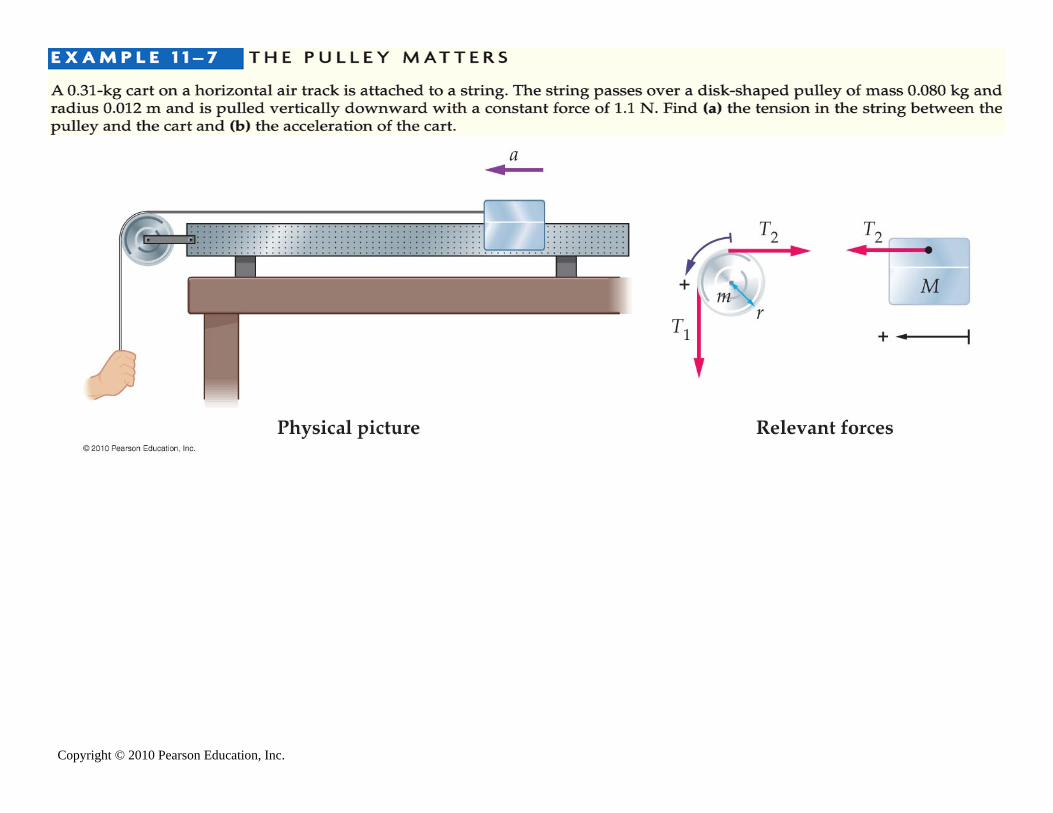
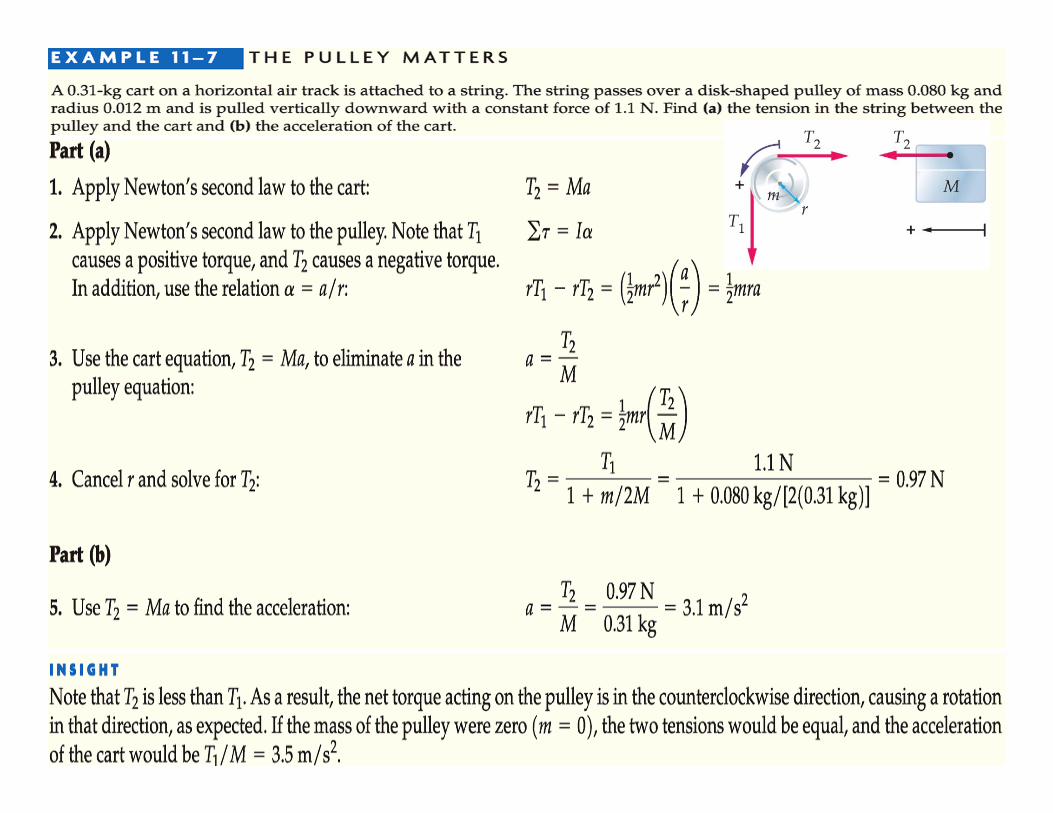
11-5 Dynamic Applications of TorqueWhen dealing with systems that have both rotating parts and translating parts, we must be careful to account for all forces and torques correctly.

Copyright © 2010 Pearson Education, Inc.
Key: free body diagrams
Copyright © 2010 Pearson Education, Inc.
Copyright © 2010 Pearson Education, Inc.
Copyright © 2010 Pearson Education, Inc.
11-6 Angular Momentum
Using a bit of algebra, we find for a particle moving in a circle of radius r,

Copyright © 2010 Pearson Education, Inc.
11-6 Angular Momentum
For more general motion,
Copyright © 2010 Pearson Education, Inc.

Copyright © 2010 Pearson Education, Inc.

Copyright © 2010 Pearson Education, Inc.
11-6 Angular Momentum
Looking at the rate at which angular momentum changes,

Copyright © 2010 Pearson Education, Inc.
Copyright © 2010 Pearson Education, Inc.

Copyright © 2010 Pearson Education, Inc.
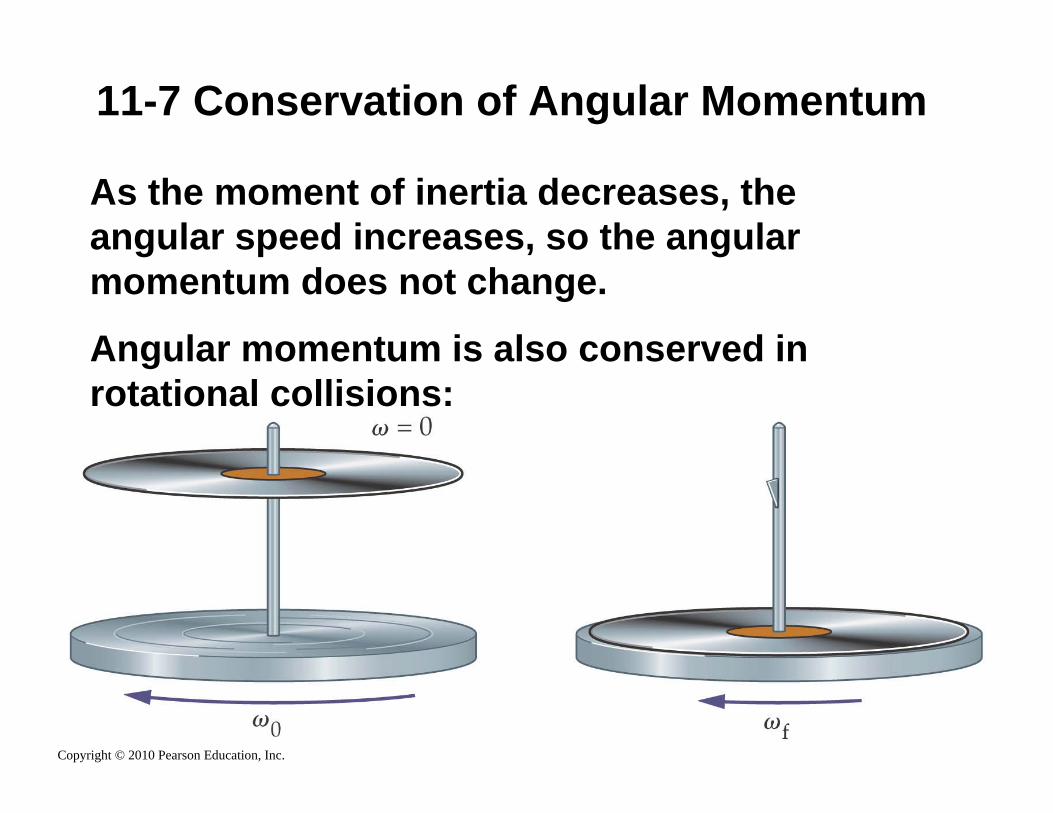
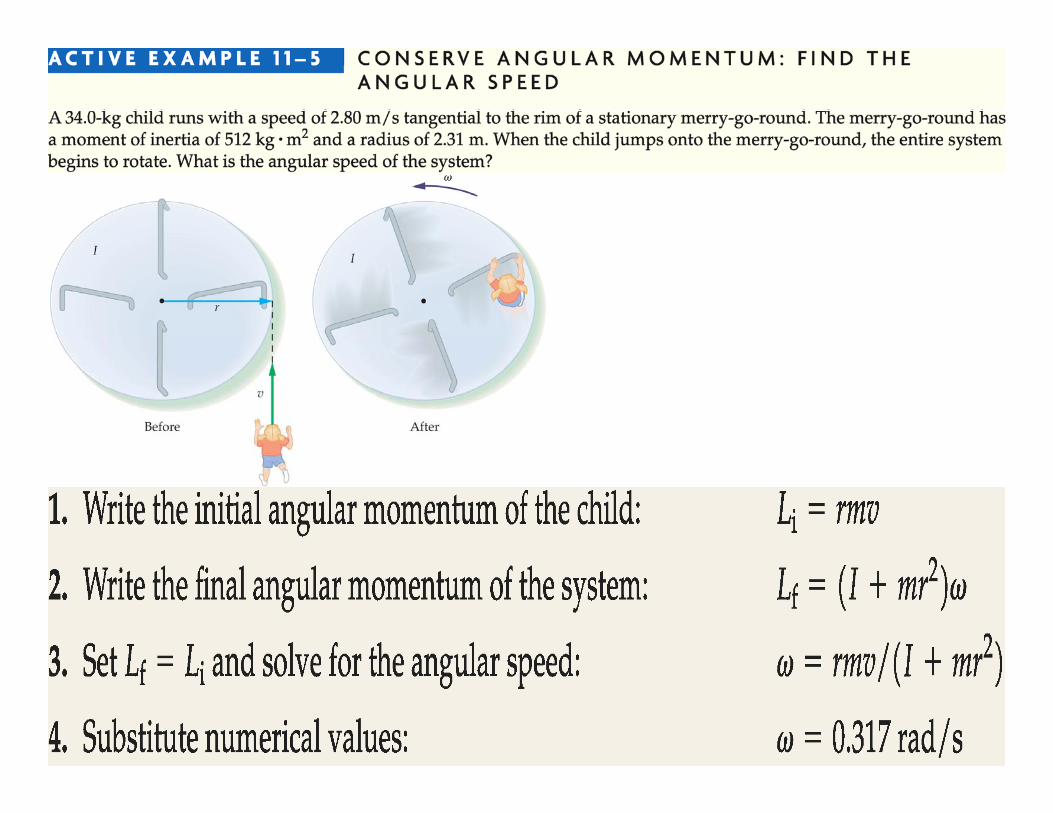
11-7 Conservation of Angular Momentum
If the net external torque on a system is zero, the angular momentum is conserved.
The most interesting consequences occur in systems that are able to change shape:
Copyright © 2010 Pearson Education, Inc.
11-7 Conservation of Angular Momentum
As the moment of inertia decreases, the angular speed increases, so the angular momentum does not change.
Angular momentum is also conserved in rotational collisions:
Question 11.7Question 11.7 Figure SkaterFigure Skater
a) the samea) the sameb) larger because sheb) larger because she’’s rotating s rotating
fasterfaster
c) smaller because her rotational c) smaller because her rotational inertia is smallerinertia is smaller
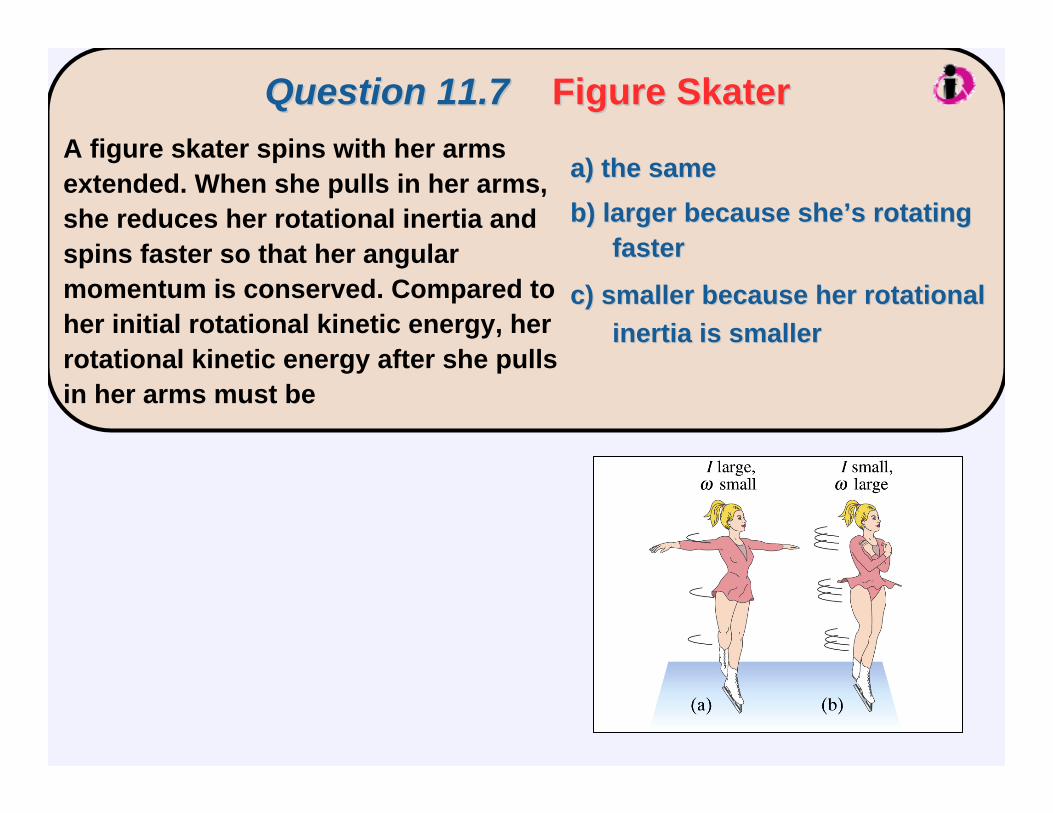
A figure skater spins with her arms extended. When she pulls in her arms, she reduces her rotational inertia and spins faster so that her angular momentum is conserved. Compared to her initial rotational kinetic energy, her rotational kinetic energy after she pulls in her arms must be

Question 11.7Question 11.7 Figure SkaterFigure Skater
a)a) the samethe same
b)b) larger because shelarger because she’’s rotating s rotating fasterfaster
c) smaller because her rotational c) smaller because her rotational inertia is smallerinertia is smaller
A figure skater spins with her arms extended. When she pulls in her arms, she reduces her rotational inertiaand spins faster so that her angular momentum is conserved. Comparedto her initial rotational kinetic energy, her rotational kinetic energy after she pulls in her arms must be:
KErot = I ω2 = L ω (used L = Iω ). Because L is conserved, larger ωmeans larger KErot. The “extra”energy comes from the work she does on her arms.
FollowFollow--upup:: Where does the extra energy come from?Where does the extra energy come from?
12
12

Copyright © 2010 Pearson Education, Inc.
Copyright © 2010 Pearson Education, Inc.

Copyright © 2010 Pearson Education, Inc.
11-8 Rotational Work and Power
A torque acting through an angular displacement does work, just as a force acting through a distance does.
The work-energy theorem applies as usual.

Copyright © 2010 Pearson Education, Inc.
11-8 Rotational Work and Power
Power is the rate at which work is done, for rotational motion as well as for translational motion.
Again, note the analogy to the linear form:
Copyright © 2010 Pearson Education, Inc.
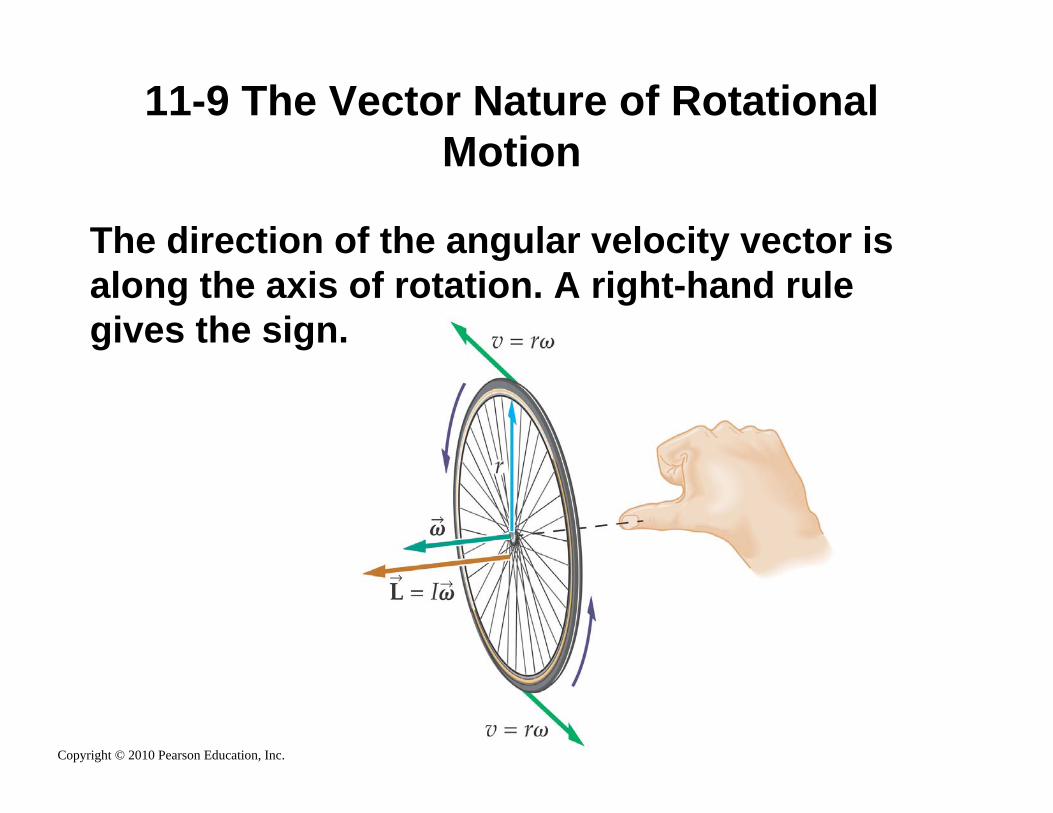
11-9 The Vector Nature of Rotational Motion
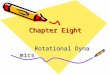
The direction of the angular velocity vector is along the axis of rotation. A right-hand rule gives the sign.
Copyright © 2010 Pearson Education, Inc.
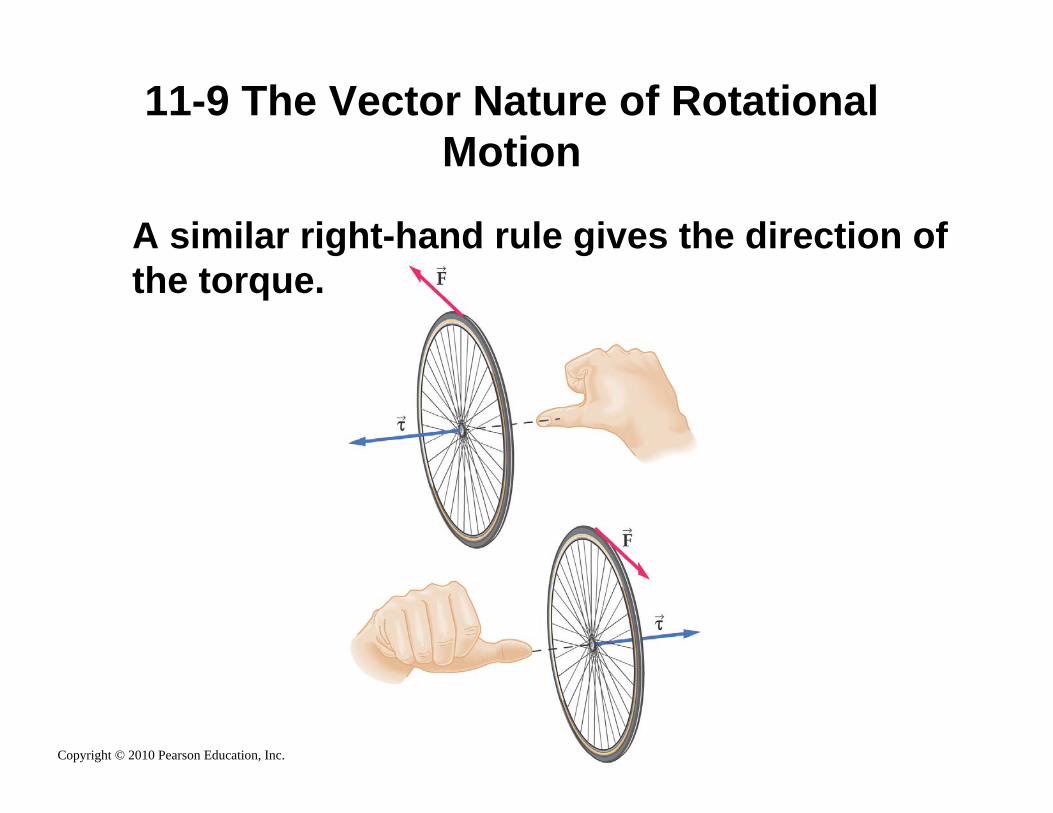
11-9 The Vector Nature of Rotational Motion
A similar right-hand rule gives the direction of the torque.
Copyright © 2010 Pearson Education, Inc.
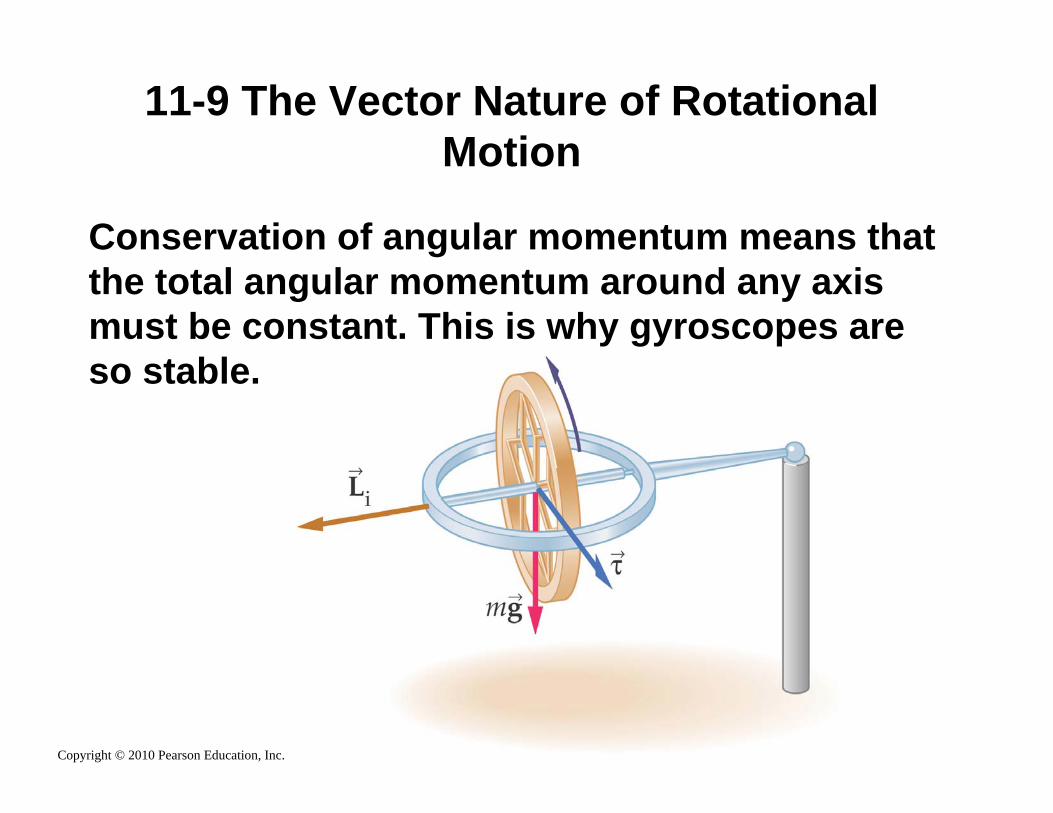
11-9 The Vector Nature of Rotational Motion
Conservation of angular momentum means that the total angular momentum around any axis must be constant. This is why gyroscopes are so stable.

Copyright © 2010 Pearson Education, Inc.
Summary of Chapter 11
•In order for an object to be in static equilibrium, the total force and the total torque acting on the object must be zero.
• An object balances when it is supported at its center of mass.

Copyright © 2010 Pearson Education, Inc.
Summary of Chapter 11
• In systems with both rotational and linear motion, Newton’s second law must be applied separately to each.
• Angular momentum:
• For tangential motion,
• In general,
• Newton’s second law:
• In systems with no external torque, angular momentum is conserved.

Copyright © 2010 Pearson Education, Inc.
Summary of Chapter 11
• Work done by a torque:
• Power:
• Rotational quantities are vectors that point along the axis of rotation, with the direction given by the right-hand rule.