Embed Size (px)
Citation preview

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 157
C h a p t e r 1C h a p t e r 1 11 : Q u a n t i z e d S y s t e m s : Q u a n t i z e d S y s t e m s Chapter 11: Quantized Systems ......................................................................................157
11.1 The Need for Quantum Mechanics ............................................................157 11.2 Quantum States ..........................................................................................160
11.2.1 Probability densities....................................................................160 11.2.2 Wave functions ............................................................................161 11.2.3 Ket and bra vectors ......................................................................162
11.3 Dynamical Variables..................................................................................164 11.3.1 Dynamical variables as operators ................................................164 11.3.2 Operators in wave mechanics; the Schrªodinger equation ............165
11.4 Eigenstates and Measurement....................................................................167 11.4 Commuting Observables............................................................................168
11.4.1 Commutation relations.................................................................168 11.4.2 Complete sets of commuting observables....................................170
11.5 Quantum States as Points in Space ............................................................171 11.5.1 Expansion in eigenstates of the Hamiltonian...............................171 11.5.2 The statistical matrix....................................................................172 11.5.3 Dyadic forms................................................................................173
11.6 The Heisenberg Equations of Motion ........................................................174 11.6.1 Time-dependent operators ...........................................................174 11.6.2 The equation of motion of a dynamical variable .........................175 11.6.3 Equation of Motion for the Statistical Matrix..............................177
11.7 Statistical Ensembles and the Density Matrix ...........................................177 11.7.1 Ensembles of quantum states .......................................................177 11.7.2 The density matrix .......................................................................178 11.7.3 The equilibrium density matrix....................................................179 11.7.4 The density matrix for a composite system .................................180
11.8 The Microcanonical Ensemble ..................................................................181 11.9 The Canonical Ensemble ...........................................................................182 11.10 The Grand Canonical Ensemble ...............................................................184
11.1 THE NEED FOR QUANTUM MECHANICS While we cannot attempt a complete discussion of the quantum theory here, it is useful to review the concepts and basic equations of the theory with particular emphasis on how they govern the statistical thermodynamics of systems whose behavior requires that quantum effects be taken into account. The need for a quantum theory arises from a fundamental problem in the experi-mental characterization of dynamical states. To specify the state of a classical system it is necessary to know its coordinates and momenta at some given time. Its subsequent

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 158
trajectory can then be calculated from Hamilton's equations of motion. However, when the particle is microscopic it is impossible to measure its coordinates and conjugate momenta simultaneously. This experimental limitation is codified in the Heisenberg Uncertainty Principle :
it is impossible to measure the position, qi, and conjugate momentum, pi, of a particle with a precision greater than the uncertainty ÎqiÎpi ≥ h 11.1 where h is Planck's constant.
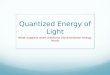
To see by example why this is the case consider how we might go about measuring the position and momentum of a particle (or of a large number of particles that make up a physical system). For simplicity assume that the mass is known so that we need only measure the position and velocity. If the particle is macroscopic we can bombard it with other particles that are relatively very light and have known trajectories until at least two of them strike the particle of interest. The experiment is diagrammed in Fig. 11.1. The trajectories of the scattered particles after the collision determine successive positions of the particle of interest and determine its velocity. If the mass and momentum of the probe particles are sufficiently small the state of the particle of interest is not significantly affected by the collisions and its true momentum is measured. A batter who is trying to hit a baseball essentially does this, unconsciously, using optical photons as probes and his eyes as a detector. He measures the position of the ball by its size and location relative to its background by capturing the photons that are scattered off of it. He measures its velocity by observing the change in its position with time, and notes its rotation (which tells him how it will "break" or curve in the air) by observing the motion of the seams on its surface. He then calculates its trajectory and attempts to hit it. Sometimes he succeeds.
{q , t }11{q , t }22
Fig. 11.1: Diagram of successive collisions of probe particles (light trajec-tories) with a much heavier particle (dark trajectory).

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 159
All classical methods for measuring the position an momentum of a particle depend on the possibility of finding a probe that satisfies two conditions: it is very small, so that it does not significantly disturb the particle when the two collide, and it has a well-defined trajectory itself so that the time, position and, if needed, momentum change associated with the collision can be determined. The first condition necessarily fails when the mass of the probe is comparable to that of the particle. For example, suppose the experiment that is diagrammed in Figure 11.1 is repeated using a probe whose mass is similar to that of the particle. The probe transfers momentum to the particle during each collision. The behavior during a sequence of collisions is diagrammed in Fig. 11.2. Assuming that the trajectories of the probes are known each collision determines a position of the particle, but only determines the change in its momentum. A comparison between the results of successive collisions determines the velocity the particle had between those collisions but leaves the current velocity undetermined. It follows that the experiment diagrammed can measure the position of the particle at given time, but cannot measure its momentum.
{q , t }11
{q , t }22
Fig. 11.2: Diagram of successive collisions of probe particles (light tra-
jectories) with a particle of comparable mass (dark trajectory).
To measure the position and momentum of a particle simultaneously one must use a probe that is very small compared to the particle. But this only transfers the problem to another level since the dynamic state of the probe must be known. Hence there must be a probe small enough to fix the state of the probe. This process evidently has a limit since there is a minimal particle, a photon, that has zero rest mass. There is no classical probe for a photon. The above discussion is intended to illustrate two principles which lie at the core of quantum mechanics and are responsible for its difference from the classical theory. First, since one must use probes to measure the dynamical state of physical systems, and since the photon is the ultimate probe, there is a limit to the ultimate precision with which the dynamic state can be defined. Heisenberg studied the ultimate accuracy of measurements using photons as probes and was led to formulate the uncertainty relation that appears as equation 11.1. It follows from the uncertainty principle that dynamical states in quantum mechanics can be characterized by given values of the particle positions, in which case their conjugate momenta are completely uncertain, by values of

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 160
the momenta, in which case the positions are uncertain, or by dynamical variables that involve some mixture of the two and may leave both the positions and momenta partly undetermined. The dynamical states are hence represented mathematically by wave functions (wave mechanics) or by "ket vectors" (in the Dirac, or matrix formulation) that specify no more than one member of a conjugate pair of position and momentum. Second, since a probe must interact with a particle in order to determine its state, the act of measuring the dynamical state perturbs it, and usually changes it. Since the calculation of the value of a dynamical variable for a system that is in a given quantum state should produce the total result of measuring it, dynamical variables in quantum mechanics are represented mathematically by operators rather than by functions, as in classical mechanics. An operator is a mathematical entity that changes a function or vector when it acts on it. These ideas are briefly developed in the following sections. 11.2 QUANTUM STATES 11.2.1 Probability densities When quantum effects must be considered the states of a system are defined very much as representative ensembles are defined in statistical mechanics, but with a very different fundamental meaning. Some of the dynamical variables of the quantum system are known because of the way the system was defined or constructed or because of constraints that are imposed by the boundary conditions on it. The constraints often in-clude the energy, linear or angular momentum, and the volume, since these are constants of the motion, but almost never include the positions, {q}, or momenta, {p}, of the individual particles. These quantities are uncertain, and the most that can be said about them is the probability that a measurement of them would yield particular values. Let the function P({q},{q+dq},t) = w({q},t) d3Nq 11.2 be the probability that a measurement of the 3N coordinates of the N particles in a hypo-thetical system at time, t, will yield values between {q} and {q+dq}. The probability that a measurement of the 3N momenta of the particles will yield values between {p} and {p+dp} is P({p},{p+dp}) = w({p},t) d3Np 11.3 These equations define the probability densities, w({q},t) and w({p},t), which are, at least in theory, observable properties of the system.

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 161
The probability densities, w({x},t), formally resemble the density functions that are used in the statistical mechanics of classical systems. However, they differ from the classical density functions in two important respects. First, a classical system has definite values of the coordinates and momenta, even though these may be unknown and must be estimated statistically. A quantum system cannot be assumed to have specific values of the coordinates and momenta unless these are fixed as part of the state. If a dynamical state is specified only by its energy, for example, it is meaningless to ask what the coordinates of its particles are; they have all values compatible with the given value of E. The act of measurement does not find the coordinates of the particles; it changes the state from one in which the energy is fixed into one in which the coordinates {q} are fixed at time, t. The probability, w({q},t), is not the probability that the coordinates are {q} at time t; it is the probability that the act of measuring the coordinates will alter the state of the system into a state in which the coordinates have the values {q} at time t. Second, by the uncertainty principle the coordinates and momenta cannot be fixed simultaneously. It follows that one cannot define the probability that the coordinates have the values {q} and the momenta have the values {p} simultaneously, since the act of fixing the values of the {q} leaves the {p} completely undetermined, and vice versa. It is not even possible to do this by successive measurement. Let the coordinates, {q}, be measured to fix the state ({q},t). It is possible to define the probability that an instantaneous subsequent measurement of the momenta, {p}, will yield particular values, but this does not leave the system in the state ({q},{p},t). The act of measuring the momenta alters the state of the system into one in which the coordinates, {q}, are undetermined. 11.2.2 Wave functions The probability, w({q},t), is a real number. The simplest way to ensure this is to write it as the product: w({q},t) d3Nq = ¥*({q},t)¥({q},t) d3Nq 11.4 since the product of a number and its complex conjugate is always real. The function, ¥({q},t), is the wave function of the system, and ¥*({q},t) is its complex conjugate. Since a measurement of the particle positions must yield some result the wave function is normalized in the sense that ⌡⌠
{q} w({q},t) d3Nq = ⌡⌠
{q} ¥*({q},t)¥({q},t) d3Nq = 1 11.5
for an integral taken over the 3N-dimensional volume of the coordinates, {q}. The wave function can be written in the momentum representation in a similar way w({p},t) d3Np = ƒ*({p},t)ƒ({p},t) d3Np 11.6 where

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 162
⌡⌠
{q} w({p},t) d3Np = ⌡⌠
{q} ƒ*({p},t)ƒ({p},t) d3Np = 1 11.7
and the integral is taken over the 3N-dimensional momentum space. 11.2.3 Ket and bra vectors The wave function, ¥({q},t), is a functional representation of the quantum state of the system. At least in simple cases, it is relatively easy to visualize and compute, and is hence the representation that is normally used for computations in quantum mechanics. However, there is an alternate representation that is based on vector-space representations of the quantum states that is much simpler for theoretical work. This representation uses the Dirac, or ket-vector notation. The Dirac notation was developed independently of wave mechanics and derives from Heisenberg's matrix formulation of the quantum theory. But it is perhaps worthwhile to motivate it from wave mechanics. Consider a system that contains a single coordinate, for example, a single particle that is constrained to move along one axis. The wave function for the system is ¥(q,t), which is associated with the probability density w(q,t) dq = ¥*(q,t)¥(q,t) dq 11.8 The function, ¥(q,t), assigns a value, ¥q(t), to each value of the variable, q, at the time t. Since q is a continuous variable it has a non-denumerably infinite number of distinct val-ues. However, it is still possible to define a space (an example of a Hilbert space) that has a non-denumerably infinite number of dimensions and is spanned by orthogonal unit vectors that are associated with each of the possible values of the variable q. Let the symbol, |q¨, represent the vector associated with the value, q. Then the function, ¥(q,t), can be written as the vector, |¥¨, in this state space, where |¥¨ = ∑
q ¥q(t)|q¨ = ⌡⌠
q ¥q(t)|q¨dq 11.9
where the sum has been replaced by an integral since the variable, q, is continuous. The vector, |å¨, is called a ket, and it defines a quantum mechanical state in the space of all possible states. Its conjugate vector, ´å|, is called a bra. The inner product or a bra and ket (or bracket), is defined so that the state is normalized. To be consistent with equation 11.5, ´¥|¥¨ = ⌡⌠
q ⌡⌠
q' ¥*
q'(t) ¥q(t)´q' |q¨dqdq'
= ⌡⌠
q ¥*
q(t) ¥q(t) dq = 1 11.10

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 163
which is true if ´q' |q¨ = ∂(q'-q) 11.11 where ∂(x) is the Dirac ∂-function, and ´¥| = ⌡⌠
q ¥*
q(t) ´q| dq 11.12
With this notation the summation in equation 11.9 has a simple interpretation. If the state |¥¨ does not fix the coordinate, q, then the coordinate can have any value and the state, |¥¨, can be regarded as a linear superposition of states, |q¨, that have particular values of q. The coefficient, ¥q(t), is the component of the vector |¥¨ in the direction of |q¨ at the time, t. The state |¥¨ can equally well be regarded as a superposition of states that have given values of the momentum, p, which is just another way of choosing the coordinates of the state space. It follows that the ket |¥¨ can also be written |¥¨ = ∑
p ƒp(t)|p¨ = ⌡⌠
p ƒp(t)|p¨dp 11.13
with ´¥| = ⌡⌠
p ƒ*
p(t) ´p| dp 11.14
and ´p' |p¨ = ∂(p'-p) 11.15 so that ´¥|¥¨ = ⌡⌠
p ƒ*
p(t) ƒp(t) dp = 1 11.16
It is straightforward to generalize these concepts to a system of N particles. In this case a distinct spatial configuration is given by a distinct set of values of the 3N coordinates in the set {q} (recall that states that differ only through the interchange of the coordinates of identical particles are not distinct). The state, |¥¨, can be regarded as a vector in a state space that is spanned by the kets, |{q}¨,
|¥¨ =
1
N! ⌡⌠
{q} ¥{q}(t)|{q}¨ d3Nq 11.17

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 164
where the factor (N!)-1 is included since that are N! identical states in the range of integration that differ only through the interchange of the coordinates of the N identical particles. The associated bra is given by the integral
´¥| =
1
N! ⌡⌠
{q} ¥*
{q}(t) ´{q}| d3Nq 11.18
The kets |{q}¨ satisfy the normalization relation
´{q'}|{q}¨ = ∏i=1
3N ∂(q'
i - qi) 11.19
which insures that ´¥|¥¨ = 1 11.20 11.3 DYNAMICAL VARIABLES 11.3.1 Dynamical variables as operators As discussed in Section 11.1, the act of measuring the value of a dynamical variable changes the state of the system. The mathematical representation of the state must change accordingly. The mathematical quantities that act on a function or a vector to produce a new function or vector are called operators. The dynamical variables of a quantum mechanical system are, therefore, represented by operators. The operator, R, that represents the dynamical variable, R(q,p), has the effect of changing the state. Mathematically, R¥({q},t) = ¥'({q},t) 11.21 or, in Dirac notation, R|¥¨ = |¥'¨ 11.22 When an operator acts on a function, as in 11.21, it is generally represented by a function, such as a number, a function, or a differential or integral operator that changes its value. When an operator acts on a vector, as in 11.22, it is usually represented by a matrix that rotates the vector in space and changes its magnitude. Since a quantum state, |¥¨, can always be regarded as a summation of other states (as discussed in the last section for the particular examples of the kets |q¨ and |p¨), the operators, R, must be linear operators, in the sense that, if

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 165
|¥¨ = ∑
k ck|k¨ 11.23
then R|¥¨ = ∑
k Rck|k¨ 11.24
In the Dirac notation the operator may be defined so that it acts either on the kets, |k¨, or on the coefficients, ck. The value of R(q,p) that is measured by an experiment on a system in a state |¥¨ is not usually a fixed number, but has a distribution of values with the mean ´R¨ = ´¥|R|¥¨ = ⌡⌠
q ¥*
q(t) R¥q(t) d3Nq 11.25
Since the expectation value of a dynamical operator is real, the operator, R, must also sat-isfy the relation ´R¨ = {´¥|R*}|¥¨ = ⌡⌠
q {R*¥*
q(t) }¥q(t) d3Nq 11.26
Operators that have this property are said to be Hermetian. For a dynamical variable, R, to have a fixed value, R, in the state |¥¨ it is neces-sary that the state |¥¨ satisfy the equation R|¥¨ = R|¥¨ 11.27 In this case the operator R simply multiplies the ket |¥¨ by a constant. When equation 11.27 is satisfied the ket |¥¨ is said to be an eigenvector of the operator R with the eigen-value, R. It follows from equation 11.26 that if R is Hermetian, R is real, and ´¥|R* = R´¥| 11.28 so that ´¥| is an eigenvector of the operator �R* with the eigenvalue R. When |¥¨ is an eigenvector of R with eigenvalue R, ´R¨ = R 11.29 and is independent of time. 11.3.2 Operators in wave mechanics; the Schrªodinger equation

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 166
The most important dynamical variables are the position, qi, the momentum, pi, the energy, E, and the time, t. In wave mechanics, where the states are represented by the functions ¥({q},t), the operators that represent these variables are well known and are qi = qi 11.30
pi = - iÓ∆
∆qi 11.31
t = t 11.32
E = iÓ∆∆t 11.33
where
Ó = h
2π 11.34
and h is Planck's constant. The operator that represents an arbitrary dynamical variable, R(q,p), can be constructed by replacing the component of momentum, pi, that is conjugate to the coordinate, qi, by the differential operator, - iÓ∆/∆qi:
R({qi},{pi}) “ R({qi},{pi}) = R({qi},{-iÓ∆
∆qi }) 11.35
In particular, the Hamiltonian of the system is represented by the operator
H = ∑k=1
3N
pk2
2mk + V(q1,...,q3N)
= - ∑k=1
3N Ó2
2mk
∆2
∆qk2 + V(q1,...,q3N) 11.36
The value of the Hamiltonian is the total energy of the system. Hence the action of the Hamiltonian operator on an allowable wave function, ¥({q},t), must be the same as that of the energy operator, E = iÓ∆/∆t. It follows that the allowable wave functions are solutions to the Schrªodinger wave equation,
H¥({q},t) = E¥({q},t) = iÓ∆∆t [¥({q},t) 11.37
If the system has fixed energy, E, then ¥({q},t) must be an eigenfunction of the energy. Equation 11.33 shows that this is only possible if

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 167
¥({q},t) = ¥n({q})e- iEnt
Ó 11.38 where the time-independent wave function, ¥n({q}), is an eigenfunction of the Hamil-tonian with the eigenvalue En: H¥n({q}) = En¥({q}) 11.39 11.4 EIGENSTATES AND MEASUREMENT An individual measurement of a dynamical variable, R({q},{p}), always yields a number, R. Once the value of R has been measured for a given system the value is known and constrains its subsequent behavior. In quantum mechanics the dynamical variable R({q},{p}) only has the value, R, if the state of the system is the eigenvector of the corresponding operator, R, that has that eigenvalue. It follows that the act of measuring the dynamic variable, R({q},{p}), fixes the system in a state that is an eigenvector of the operator, R, with the particular eigenvalue, R, that is the result of the measurement. From this perspective it is often useful to express the state of the system as a linear combination of eigenvectors of the operator, R, that corresponds to the dynamical variable of interest (usually the energy). We already used this approach to express |¥¨ as a linear combination of the eigenvectors |{q}¨ of the coordinates, {q}, or the eigenvectors |{p}¨ of the momenta {p}. Let all possible eigenvectors of the operator, R, be given by the set |Rn¨, where R|Rn¨ = Rn|Rn¨ 11.40 and the vectors |Rn¨ are normalized. It is always possible to choose the eigenvectors of R so that they are orthonormal: ´Rn'|�Rn¨ = ∂nn' 11.41 where ∂nn' is the Kronecker ∂. (Equation 11.41 assumes that the eigenvalues of R are dis-crete; if they have a continuous spectrum, as do the momentum, p, and position, q, the Kronecker ∂ is replaced by the Dirac ∂-function, as in equations 11.11 and 11.15.) The orthonormality of eigenvectors that have different eigenvalues follows immediately from equations 11.25 and 11.26, since ´Rn'|R|Rn¨ - {´Rn'|R*}|Rn¨ = (Rn-Rn')´Rn'|�Rn¨ = 0 11.42 which requires equation 11.41 unless Rn = Rn'. When two or more distinct states have the same eigenvalue they are said to be degenerate. The eigenvectors of a single operator usually are degenerate. But since the degenerate eigenstates are distinct they must differ

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 168
in the expected value of some other dynamical variable and can always be defined so that they are orthonormal, for example, by separating them into distinct eigenvectors of other dynamical variables. Since the measurement of a dynamical variable, R, always yields a value and fixes the state in the eigenvector of the operator, R, that has that value, it must be possible to express the state of the system as a linear combination of the eigenvectors of R: |¥¨ = ∑
n cn(t)|Rn¨ 11.43
where the coefficients, cn(t), are usually functions of time and ∑
n c*
n cn = ∑n
|cn|2 = 1 11.44
since |¥¨ is normalized. The expected value of the variable, R({q},{p}), in the state |¥¨ is ´R¨ = ´¥|R|¥¨ = ∑
mn c*
n cmRm´Rn|Rm¨
= ∑
n |cn|2Rn 11.45
The factor |cn|2 is the probability that a measurement of R will yield the value Rn; it gives the statistical weight of the state |Rn¨ in the state |¥¨. 11.4 COMMUTING OBSERVABLES 11.4.1 Commutation relations The outcome of applying successive linear operators to a quantum state may depend on the order in which the operators are applied. If R and R' are linear operators, RR'|¥¨ - R'R|¥¨ = [RR' - R'R]|¥¨ = [R,R']|¥¨ 11.46 The quantity [R,R'] = RR' - R'R 11.47 is called the commutator of R and R'. If [R,R'] = 0 11.48

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 169
for every state |¥¨ the two operators are said to commute. The commutator determines whether the operators that represent the dynamical variables R and R' can have the same eigenstates, that is, whether a system can simulta-neously have fixed values of R and R'. Let a system in state |¥¨ have a defined, constant value of R. Then |¥¨ must be an eigenvector of the operator R. If the system simultane-ously has a fixed value of the dynamical variable R' then |¥¨ must also be an eigenvector of R'. In that case R'R|¥¨ = RR'|¥¨ = RR'|¥¨ = R'R|¥¨ = RR'|¥¨ 11.49 since R and R' are numbers; the operators R and R' must commute. It follows that
a dynamical system cannot have simultaneous fixed values of the distinct dynamical variables, R and R', unless the operators associated with those variables commute.
In particular, a system cannot simultaneously have fixed values of a coordinate, qi, and its conjugate momentum, pi, since
[qi,pi] = [qi,- iÓ∆
∆qi ] = - iÓ ≠ 0 11.50
This rule has a simple interpretation in the theory of measurement in quantum mechanics. A measurement of the variable R fixes the system in an eigenstate of the operator R, while a measurement of R' confines it in an eigenstate of R'. If the two operators commute they have the same set of eigenvectors, and the state |¥¨ can be expressed as a linear superposition of simultaneous eigenstates of the two operators. The probability that a sequential measurement of R and R' will yield a particular pair of values is just the statistical weight of the states that have the particular values R and R' in the state |¥¨. This probability is independent of the order of the measurements. If the operators do not commute, however, their eigenvectors are different. If the variable R is measured first the system is confined to an eigenvector of R, while if R' is measured first the system is confined to an eigenvector of R'. The subsequent measurements of R or R' are done on completely different states of the system, and should not have the same value. The dynamical variables (observables) R and R' always commute when R' is a function of R, for, if R' = ™R'(R) 11.51 and |Rn¨ is an eigenvector of R with the eigenvalue Rn,

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 170
R'|Rn¨ =™R'(R)|Rn¨ 11.52 as may be easily shown by expanding the function ™R'(R) as a power series in R. The same result follows from the simple observation that, since R' and R are not independent variables, there is a one-to-one correspondence between their eigenvalues. Any two eigenvectors that are degenerate in R are also degenerate in R'. The converse also holds. If there is a one-to-one correspondence between the eigenvectors of R and those of R' then they are functionally related. When R and R' are independent observables that commute with one another (that is, when they are not functionally related) then it is possible to use the eigenvectors of R' to reduce the degeneracy of the set of eigenvectors, |Rn¨, of R. At least some of the eigenvectors of R that have the same value of Rn must have distinct values of R', else there would be a one-to-one correspondence and R' would be a function of R. The set of simultaneous eigenvectors, |RnR'
m ¨ is complete in the sense that any state, |¥¨, that can be expressed as a linear combination of the eigenvectors |Rn¨ can also be written as a linear combination of the eigenvectors |RnR'
m ¨, which have lower degeneracy than the set of the |Rn¨. 11.4.2 Complete sets of commuting observables This reasoning leads to the concept of a complete set of commuting observables, which plays a role in quantum mechanics like that of the complete set of dynamical vari-ables in classical mechanics or the complete set of constitutive coordinates in thermody-namics. The eigenvectors of a single operator, R, form a set that is usually degenerate in the sense that several distinguishable states have the same value of the eigenvalue, Rn. But if these states are distinguishable they must have different values of some other dynamical variable. Let this variable be R1. But if a state can have fixed values of both R and R1 the operators R and R1 must commute. It is then possible to divide the eigenvectors that have the same eigenvalue, Rn, of R into a less degenerate set of simultaneous eigenvectors of R and R1. But this state may still be degenerate. Those distinguishable states that have the same value of R and R1 must differ in the value of some third observable, R2. Since R2 has a definite value consistent with R and R1, the operator R2 must commute with R and R1, and the simultaneous eigenvectors of R, R1, and R2 form a set |RnR1
m R2p ¨ that has still lower degeneracy. Proceeding in this
way we eventually arrive at a set of independent observables that all commute with one another and have the property that there is only one simultaneous eigenvector for each distinct set of eigenvalues. This set of operators forms a complete set of commuting observables. A complete set of commuting observables defines a complete set of eigenvectors, |n¨, that are non-degenerate and, therefore, orthonormal, ´n' |n¨ = ∂nn' 11.53

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 171
and have the property that any state, |¥¨, can be written as the linear combination |¥¨ = ∑
n cn|n¨ 11.54
The kets |n¨ are called the basic kets for a representation based on the complete set of commuting observables R, R1, ..., Rn. They define a coordinate frame. Any quantum state of the system can be written as a vector in that coordinate frame, given by equation 11.54. 11.5 QUANTUM STATES AS POINTS IN SPACE 11.5.1 Expansion in eigenstates of the Hamiltonian Any complete set of commuting observables defines a coordinate space. The al-lowable quantum states are vectors in the space. It is almost always useful to choose the set of observables so that it includes the total energy, or Hamiltonian operator, since the energy is conserved. When this is done the basic kets are eigenvectors of H: H|n¨ = En|n¨ 11.55 and are simultaneous eigenvectors of a sufficient set of operators that commute with H to break their degeneracy. The |n¨ can be chosen to be time-independent, or stationary states of constant energy, and are orthonormal. Now let the basic kets, |n¨, define a vector space. Any state, |¥¨, can be written as the linear combination |¥¨ = ∑
n cn(t)|n¨ 11.56
and is, hence, specified by the set of coefficients, {cn}, that label its image point in the space spanned by the vectors |n¨. Since |¥¨ is normalized, ´¥|¥¨ = ∑
mn c*
m cn´m|n¨ = ∑n
|cn|2 = 1 11.57
The coefficient |cn|2 = wn 11.58
is the statistical weight of the energy eigenstate |n¨ in the state |¥¨.

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 172
Since the |n¨ are stationary eigenvectors of the Hamiltonian the time dependence of the state is embedded in the set of coefficients, {cn(t)}. Their time dependence can be found from the relation
H|¥¨ = iÓ∆∆t
∑
n cn|n¨ = ∑
n
iÓ∆cn∆t |n¨ = ∑
n cnEn|n¨ 11.59
where the third form of the right-hand side follows from equation 11.55. Equating the second and third forms of the right-hand side yields
cn(t) = c0n e
- iEntÓ = = c0
n e-i∑nt 11.60 where c0
n is the value of cn at some reference time and
∑n = EnÓ 11.61
is the angular frequency of the coefficient cn(t). The image point of the system evolves through the space spanned by the eigenvectors |n¨ according to equation 11.60. However, |cn|2 = |c0
n |2 = wn 11.62 and the statistical weight of the state |n¨ remains the same. 11.5.2 The statistical matrix The expectation value of a dynamical variable, R, in the state |¥¨ is ´¥|R|¥¨ = ∑
mn c*
m cn´m|R|n¨ = ∑mn
wnmRmn 11.63
where the elements wnm = c*
m cn 11.64 define the statistical matrix of the state |¥¨ and Rmn is the matrix element of the operator R: Rmn = ´m|R|n¨ 11.65

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 173
Both wmn and Rmn are square matrices whose dimension is equal to the number of eigen-states, |n¨, in the spectrum of H. The diagonal elements of the statistical matrix are wnn = |cn|2 = wn 11.66 and are independent of time. The off-diagonal elements, however, oscillate with time ac-cording to the relation
wnm(t) = w0nm e
i(Em-En)tÓ 11.67
Suppose that the eigenvectors of the Hamiltonian of a system are known. The matrix elements, Rmn, of any dynamical operator, R, can be found from equation 11.65. A state of the system is completely specified by the statistical matrix, wnm, since the ex-pected value of any dynamical variable can be calculated from equation 11.66. 11.5.3 Dyadic forms Any operator, R, can be written in dyadic form in terms of the eigenvectors of the Hamiltonian. The representation is R = ∑
ij | i¨Rij´j | 11.68
since, given the orthogonality of the eigenvectors of H, ´m|R|n¨ = Rmn as required by equation 11.64. The statistical matrix itself is generated by the statistical operator, w, which has the representation w = ∑
ij | i¨wij´j | = ∑
ij | i¨cic
*j ´j | 11.69
since the definition 11.68 yields correct values for the matrix elements of w: ´n|w|m¨ = wnm 11.70 It follows that the expected value of any dynamical variable, R, in the state |¥¨ is given by the sum ´R¨ = ´¥|R|¥¨ = ∑
n ´n|wR|n¨ = ∑
nm wnmRmn 11.71

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 174
11.6 THE HEISENBERG EQUATIONS OF MOTION 11.6.1 Time-dependent operators The expected value of the dynamical variable, R, for a system in the quantum state, |¥¨, is given by the inner product, ´R¨ = ´¥|R|¥¨ In the usual case R is a function of time, since the state |¥¨ depends on the time. How-ever, the time derivatives of R have their simplest form when the operator, R, is treated as an explicit function of time, R(t), that acts on the initial state of the system, |¥0¨. To de-fine the time-dependent operator, R(t), we begin by writing |¥¨ as a linear combination of the time-independent eigenstates of the energy, |n¨, as in Section 11.5. The expected value of R at time t is ´R¨ = ∑
mn ´m|c*
m(t) Rcn(t)|n¨
= ∑mn
´m|c0*m
e iEmt
Ó R
e- iEnt
Ó c0n |n¨
= ∑mn
w0nm
e iEmt
Ó Rmn
e- iEnt
Ó 11.72
Equation 11.72 can be simplified by defining the time projection operator, T,
T = e- iHt
Ó 11.73 where H is the Hamiltonian. When the time projection operator, T, acts on the state a system has at time t = 0 it generates the state of the system at time t, as shown below:
T|¥0¨ = e- iHt
Ó |¥0¨ = ∑n
e- iHt
Ó c0n |n¨
= ∑n
e- iEnt
Ó c0n |n¨ = ∑
n cn(t)|n¨ = |¥¨ 11.74
where we have used the identity

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 175
e- iHt
Ó |n¨ = e- iEnt
Ó |n¨ 11.75 which can be taken as a definition or established by expanding the exponential on the left hand side and evaluating it term by term. It follows from equation 11.75 that the matrix elements of the operator R(t) = T-1RT 11.76 are
[R(t)]mn =
e iEmt
Ó Rmn
e- iEnt
Ó 11.77 Comparing equation 11.72, we have the result that ´R¨ = ´¥|R|¥¨ = ´¥0|R(t)|¥0¨ 11.78 that is, the mean value of the operator R in the state |¥¨ at time t is the same as the mean value of the operator R(t) = T-1RT in the initial state |¥0¨. 11.6.2 The equation of motion of a dynamical variable The time derivative of the operator R(t) can be obtained in the following way. If both sides of equation 11.76 are multiplied by the operator T the result is TR(t) = RT 11.79 whose time derivative is
dT
dt R(t) + T
dR(t)
dt = R
dT
dt 11.80
since R is independent of time. Using the definition
H = iÓddt 11.81
and equation 11.80 we have
dR(t)
dt = (iÓ)-1{T-1RHT - T-1HTR(t)}
= (iÓ)-1{R(t)H(t) - H(t)R(t)}

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 176
= (iÓ)-1[R(t),H(t)] 11.82 where [R(t),H(t)] is the commutator of the time-dependent operators. Equation 11.82 holds for arbitrary choices of the zero of time. We can, therefore, choose the zero of time to be the current time. Then T = 1, and
dR
dt = (iÓ)-1[R,H] 11.83
Equation 11.83 shows that the time derivative of the operator that represents a dynamical variable is simply (iÓ)-1 times its commutator with the Hamiltonian. The expected value of the time derivative of a dynamical variable can now be calculated:
´
dR
dt ¨ = ´¥|
dR
dt |¥¨ = (iÓ)-1´¥|[R,H]|¥¨
= (iÓ)-1´[R,H]¨ 11.84 Equation 11.84 is the Heisenberg equation of motion, and shows that the expected value of the time derivative of a dynamical variable is simply (iÓ)-1 times the expected value of its commutator with the Hamiltonian. Two important results follow from the Heisenberg equation of motion. First, if the operator, R, commutes with the Hamiltonian then its time derivative is zero.
A dynamical variable whose operator commutes with the Hamiltonian is a constant of the motion.
Second, the Heisenberg equation of motion establishes a close connection between classical and quantum mechanics. The classical equation of motion for the dynamical variable R(q,p) can be written in terms of the Hamiltonian in the following way:
ddt [R(q,p)] = ∑
i=1
3N.
∆R
∆qi
dqidt +
∆R
∆pi
dpidt
= ∑i=1
3N
∆R
∆qi
∆H∆pi
-
∆R
∆pi
∆H∆pi
= {R,H} 11.85
where the quantity {R,H} is called the Poisson bracket. Equations 11.84 and 11.85 show that the quantum equations of motion can be obtained from the corresponding classical

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 177
ones by replacing the dynamical variable, R, by the operator, R, and replacing the Poisson bracket by the commutator, (iÓ)-1[R,H]. 11.6.3 Equation of Motion for the Statistical Matrix The equation of motion for the statistical operator, w, differs slightly from that for an ordinary dynamical variable. Using the representation of w given in equation 11.69,
R = ∑ij
| i¨cic*j ´j | = ∑
ij | i¨e
- iEitÓ c0
i c0*j e
iEjtÓ ´j | 11.86
It follows that the time-dependent operator, w, is w = Tw0T-1 11.87 where the w0 is the statistical operator at the reference time. Arguments identical to those leading to equation 11.84 then show that the equation of motion for the statistical operator is
∆w∆t = - (iÓ)-1[w,H] 11.88
where we have used the partial time derivative because w refers to a particular point in state space. The right-hand side is the negative of that in equation 11.84. Equation 11.88 shows that the statistical matrix is a constant of the motion if w commutes with H. If this is true the state |¥¨ must be an eigenvector of H with a given value of the energy, E, and is therefore expressible as a linear combination of the eigen-vectors |E,n¨ of H that have energy E. 11.7 STATISTICAL ENSEMBLES AND THE DENSITY MATRIX 11.7.1 Ensembles of quantum states The discussion in the preceding section addresses situations in which the quantum state of a system is known or can be calculated. In common physical situations this is not true. The constraints on the system are specified, but the precise quantum state is not known. We return to the notion of the statistical ensemble to predict the behavior of the system. Let a system be known in sufficient detail to define its Hamiltonian and its stationary states, |n¨. The latter are the time-independent eigenfunctions, or basic kets, of the Hamiltonian and a sufficient number of other commuting observables to define a complete set. Any state of the system, |¥¨, can be written as the linear combination

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 178
|¥¨ = ∑
n cn|n¨ 11.89
Equivalently, a state of the system is characterized by the statistical operator, w, which defines the statistical matrix whose elements are wmn with respect to the basic kets |n¨. In general the state of the system is not known. The system can be in any one of a number of states that are consistent with its definition and constraints. As in classical sta-tistical mechanics, we might represent the system by a statistical ensemble which includes members in all admissible states in accordance with some density function. But quantum mechanics differs from classical mechanics in an important respect. When the quantum state of a system is unknown it is not meaningful to talk about the probability that the system is "in" a certain state. If |¥¨ and |¥'¨ are admissible states then so is any normalized linear combination, c1|¥¨ + c2|¥'¨, and the possible states are not independent of one another. However, it is possible to discuss the probability that a measurement of a dynamical variable, R, will have the result Rn; this is equal to the probability that a measurement of R will confine the system to a linear combination of eigenstates of the operator R that have the eigenvalue Rn. It is also possible to define the probability that the simultaneous measurement of a complete set of commuting observables will yield a particular set of values. This probability gives the weight of the state |n¨ in the statistical ensemble. Hence an ensemble in quantum mechanics is a mixture of admissible quantum states such that the probability that a measurement of a dynamical variable yields a particular value gives the frequency with which that value is obtained in an infinite sequence of measurements on identical systems under the same constraints. The ensemble can be imagined to consist of systems that have all the orthogonal basis states, |n¨, with the frequency ®n, defined below. 11.7.2 The density matrix To make these notions precise we define an ensemble of quantum states by speci-fying the density operator, ®. The operator, ®, is mathematically analogous to the statis-tical operator, w, that was defined in Section 11.5. It has the representation ® = ∑
ij | i¨ ®ij ´j | 11.90
The density operator can be defined in terms of any complete set of states, but we will al-most always take the basis states to be eigenvectors, |n¨, of the Hamiltonian. The density operator is normalized according to the relation ∑
n ´n|®|n¨ = ∑
n ®n = 1 11.91

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 179
where we have used the notation ®nn = ®n 11.92 for the diagonal elements. The expected value of the dynamical variable, R, in a large se-quence of measurements on systems randomly selected from the ensemble is ´R¨ = ∑
n ´n|®R|n¨ = ∑
nm ®nmRmn 11.93
When the basis states, |n¨, are eigenstates of R, that is, when R commutes with the Hamiltonian operator, H, then ´R¨ = ∑
n ®nRn 11.94
Equation 11.94 has the form of a weighted average over the basis states, where ®n is the statistical weight of the basis state |n¨ and Rn is the constant value of R in that stationary state. 11.7.3 The equilibrium density matrix The density matrix has a simple form when the ensemble represents a system at equilibrium and the basis states are stationary states with constant energy. Since the den-sity operator has the same representation as the statistical operator, w, the analysis leading to equation 11.88 shows that its time derivative is
∆®∆t = - (iÓ)-1[®,H] 11.95
But when the system is at equilibrium the density operator cannot depend on time. Hence, the equilibrium density operator commutes with the Hamiltonian. It therefore has the same eigenstates. If the basis states for an equilibrium ensemble are chosen to be the eigenvectors, |n¨, of the Hamiltonian, the equilibrium density matrix is diagonal ®nm = ®n∂nm 11.96 The operator, ®, has the representation ® = ∑
n |n¨ ®n ´n| 11.97

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 180
and the mean value of a dynamical variable, R, over the ensemble is ´R¨ = ∑
n ®nRn 11.98
where Rn = ´n|R|n¨ 11.99 Equation 11.98 holds whether or not R commutes with H, that is, whether or not the states |n¨ are eigenvectors of R. In the following we shall assume that the basis states are energy eigenstates unless it is explicitly stated otherwise. 11.7.4 The density matrix for a composite system The density matrix of the ensemble that represents a composite quantum system can be constructed from the values of the density matrix of the subsystems just as in classical mechanics. Let a composite system be constructed by joining together two weakly interacting subsystems. The states of weakly interacting subsystems are independent. Hence the basis states of the composite system are combinations of the states of the subsystems: |n¨ = |n1,n2¨ 11.100 where n1 is a set of eigenvalues of a complete set of commuting observables for system K1 and n2 is a corresponding set for system K2. The probability that a measurement of the properties of the system will find the set of values {n} = {n1,n2} is just the product of the probabilities that K1 has the values {n1} and K2 has the values {n2}. It follows that the density matrices multiply:
®n = ®1n1 ®
2n2 11.101
where ®1 and ®2 are the density matrices for the two subsystems, and n1 and n2 refer to the states that join together to make the composite state |n¨. The normalization of the density matrix of the composite system follows from the independent normalization of ®1 and ®2:
∑n
(®n) = ∑n1n2
®1n1 ®
2n2 =
∑
n1 ®1
n1
∑
n2 ®2
n2
=
∑
n1 ®1
n1 = 1 11.102

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 181
These relations are easily generalized to an arbitrary number of subsystems. Since the density matrices multiply when subsystems are combined their logarithms add:
ln(®n) = ln(®1n1 ) + ln(®
2n2 ) 11.103
Since the logarithm of ® is an additive integral of the motion then, as in classical mechanics, it must be possible to express it as a linear combination of the additive integrals of the motion that define the state of the system. For a system at rest that contains a one-component fluid we have, therefore, ln(®n) = å - ∫E + ©N + πV 11.104 Equation 11.103 has the consequence that the constants å,∫,© and π are the same every-where within a homogeneous system, just as in the classical case. Equation 11.104 repro-duces the central equation of the statistical thermodynamics of classical systems. Essen-tially all of the other relations that hold in classical statistics have quantum analogues that are identical in functional form. We shall only summarize these, confining our discussion to the microcanonical, canonical and grand canonical ensembles of a one-component fluid. 11.8 THE MICROCANONICAL ENSEMBLE The microcanonical ensemble represents an isolated system. The quantum states included in the microcanonical ensemble include the stationary states of a complete set of commuting observables that have a given value of the energy (to within the approximation discussed below) and are consistent with the values of the other macroscopic constraints that define the system. From equation 11.104 the diagonal elements of the density matrix have constant values, ®. By analogy to the classical case we make the definition ln(®) = - S 11.105 where S = ¡S(E,V,N) 11.106 is the entropy. The temperature, pressure and chemical potential can be obtained by differentiation in the usual way. The entropy is associated with the degeneracy of the system as in the classical case. Since the ®n are normalized,

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 182
∑
n ®n = ®∑(E,V,N) = 1 11.107
where ∑(E,V,N) is the number of independent states that have E, V and N, or, equiva-lently, the degeneracy of the eigenvectors |E¨ of the Hamiltonian that have the energy E. It follows that S = ¡S(E,V,N) = ln[∑(E,V,N)] 11.108 as in classical statistics. These relations are easily adapted to treat systems with more general sets of deformation coordinates, as was done for the classical case. However, we should note that there is some imprecision in the analysis of a microcanonical ensemble of quantized systems since the energy of the system is not exactly known. The uncertainty principle can be written in the form ÎEÎt ≥ h 11.109 which has the consequence that the energy of a system cannot be precisely defined in a time less than
t = h
ÎE 11.110
where ÎE is the separation between energy levels. The energy of the system is not pre-cisely defined, but is confined to the interval, ÎE. If ∑(E) is the density of states at the energy, E, ∑ = eS = ∑(E)ÎE 11.111 Note that the density of states increases exponentially with the entropy, and hence with the size of the system. The energy difference between adjacent states is proportional to ∑(E)-1, and hence decreases exponentially with the size of the system. 11.9 THE CANONICAL ENSEMBLE The canonical ensemble represents a system that has a fixed mechanical and chemical content, but interacts with a thermal reservoir across a diathermal wall. The basis states of the canonical ensemble include the eigenvectors of a complete set of commuting observables for all values of the energy consistent with given values of the mechanical and chemical variables. Given equation 11.104, the density matrix can be written in the form

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 183
ln(®n) = ∫(F-En) 11.112 where, as in the classical case,
∫ = 1T 11.113
where T is the absolute temperature. Using the statistical definition of the entropy, S = - ∑
n ®n ln(®n) 11.114
the quantity F can be shown to be the Helmholtz free energy, F = ¡F(T,V,N) = ´E¨ - TS 11.115 The value of F can be found from the normalization condition on the ®n, and is F = -T ln[Z(∫)] 11.116 where Z(∫) is the canonical partition function,
Z(∫) = ∑n
e- ∫En = ∑E
∑(E)e- ∫E
11.117
where the summation in the second form is taken over all possible values of the energy. The canonical partition function determines the thermodynamics of the system. It fixes the fundamental equation, ¡F(T,V,N), by equation 11.116. The other thermodynamic properties can be found by differentiation. The statistical definitions of the partial deriva-tives are the quantum analogues of those made in the classical case. For example, the pressure is
P = ´P¨ = - ´
∆En
∆V ¨ = ´
∆ln(∑)
∆V ¨ 11.118
where the expected value of the variable, R, is given by
´R¨ =
1
Z(∫) ∑n
Re- ∫En =
1
Z(∫) ∑E
R∑(E)e- ∫E
11.119

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 184
11.10 THE GRAND CANONICAL ENSEMBLE The grand canonical ensemble represents an open system. The mechanical defor-mation coordinates are fixed, and the system exchanges energy and material with an envi-ronment that functions as a thermal and chemical reservoir. Its basic states include states with all energies and particle numbers that are consistent with the given values of the me-chanical deformation coordinates. When the system is a one-component fluid the density matrix can be written ln(®n) = ∫(„ - En + µN) 11.120 where the states, |n¨, include all possible particle numbers and all possible values of the energy for each number of particles. As in the case of classical statistics it can be shown that ∫ is the reciprocal temperature and µ is the chemical potential. Using the statistical definition of the entropy, equation 11.114, the quantity „ is found to be the work function „ = ¡„(T,µ,V) = ´E¨ - TS - µ´N¨ 11.121 The work function can be evaluated from the normalization condition on ®n, and is ¡„(T,µ,V) = - T ln[Z(∫,µ)] 11.122 where Z(∫,µ) is the grand canonical partition function,
Z(∫,µ) = ∑N
e ∫µN
∑n
e- ∫En
Z(∫,µ) = ∑N
e ∫µN
∑E
∑(E,N)e- ∫E
11.123
where the summations in braces are summations over all possible energy states at a given value of the particle number. The evaluation of the partition function fixes the thermody-namics of the system since the work function is determined by equation 11.122 and all other equilibrium thermodynamic properties are determined by the derivatives of the energy function. The grand canonical ensemble can easily be generalized to more complex sets of macroscopic constitutive coordinates, as was done for the classical case in Chapter 11. Representative ensembles for other experimental situations can be constructed through derivations analogous to those used in the classical case. Equation 11.104, or its generalization, fixes the density matrix. The normalization of the density matrix defines the appropriate thermodynamic potential and partition function. If the partition function

Notes on the Thermodynamics of Solids J.W. Morris, Jr.; Fall, 2008
page 185
can be evaluated, the thermodynamic potential is given by an equation like 11.122, and the thermodynamic properties that are not fixed by the boundary conditions on the system can be obtained by differentiation.