Upload
ewfsd
View
226
Download
3
Embed Size (px)
Citation preview
7/30/2019 Chapter 11 Balancing
1/102
535
C H A P T E R 11
Rotor Balancing 11
Mass unbalance in a ro tat ing systemoften produces excessive syn chronous forces tha t r educes the life span of va rious
mechan ical elements. To minim ize the detrim enta l effects of unba la nce, tu rbo
machinery rotors are balanced with a variety of methods. Most rotors are suc-cessfully balanced in slow speed shop balancing machines. This approach pro-
vides good a ccessibility t o a ll correction pla nes, a nd t he option of mult iple run s to
achieve a satisfactory balance. It is generally understood that balancing at slow
speeds with the rotor supported by simple bearings or rollers does not duplicate
the rotational dynamics of the field installation. Other rotors are shop balanced
on high speed balancing machines installed in vacuum pits or evacuated cham-
bers. These units provide an improved simulation of the installed rotor behavior
due to the higher speeds, and the use of bea rings t ha t more closely resemble the
normal m a chinery run ning bearings. In t hese high speed bunkers, the infl uence
of rotor blades and wheels are substantially reduced by operating within a vac-
uum. In genera l, this is a desirable running condition for correcting rotor unba l-
a nce, and for st udying t he synchronous behavior of an unruly r otor.
Some machines, such a s lar ge steam t urbines, often require a fi eld trim ba l-ance due to the influence of higher order modes, or the limited sensitivity of the
low speed ba lance techniques. There is a lso a sma ll group of ma chines t ha t con-
ta in segmented rotors tha t a re assembled concurrently with the sta t ionar y dia-
phragms or casing. In these types of machines, the final rotor assembly is not
achieved until most of the stationary machine elements are bolted into place.
Machines of this confi gura tion almost a lwa ys require some type of field tr im bal-
a nce corr ection.
In t he overview, virtua lly all rota ting ma chinery rotors ar e bala nced in one
wa y or another. As sta ted in cha pter 9, this is a funda menta l property of rota ting
machinery, and it must be considered in any type of mechanical analysis. Fur-
thermore, it is a lmost m a nda tory for the ma chinery dia gnostician t o fully under-
stand the behavior of mass unbalance, and the implications of unbalance
distribution upon t he rotor mode shape, and the overall ma chinery beha vior. Ifthe diagnostician never balances a rotor during his or her professional career,
they still must understand the unbalance mechanism to be technically knowl-
edgeable and effective in this business.
7/30/2019 Chapter 11 Balancing
2/102
536 Chapter-11
Rotor balancing is often considered to be a straightforward procedure that
is performed in accordance with the instructions provided by the balancing
machine manufacturer. Although this is true in many instances of shop balanc-
ing, field balancing is considerably more complicated. It must always be recog-nized tha t t he rotor responds in accorda nce to the mecha nical chara cteristics of
ma ss, stiffness, and d a mping. Thus, a r otor subjected to a low speed shop bala nce
does not necessarily gua ra ntee tha t fi eld opera ting char a cteristics will be a ccept-
able. In most instances, simple rotors may be acceptably shop balanced at low
speeds. In some cases, complex rotor systems, or units with sophisticated bearing
or seal arrangements, may require a field trim balance at full operating speeds,
wit h the rotors insta lled in the actua l machine ca sing.
In either situation, the synchronous 1X response of the rotor must be
understood, and the influence of balance weights must be quantified. Shop bal-
a ncing machines typica lly perform the full arr ay of vector calculations wit h th eir
internal software. However, field balancing requires the integration of various
tra nsducers w ith vector calcula tions performed a t one or m ore opera ting speeds.
In order to provide a n improved understa nding of rotor synchronous motion, the
influence of higher order modes, an d t he ty pica l fi eld bala nce ca lculat ion proce-
dure, cha pter 11 is present ed.
BEFORE BALANCING
There are several considerat ions t ha t sh ould be addr essed prior t o the fi eld
bala ncing of a ny r otor. The funda menta l issue concerns w hether or not t he vibra-
tion is caused by mass unbalance or another malfunction. A variety of other
mechanisms can produce synchronous rotational speed vibration. For example,
the following list identifi es problems t ha t initia lly can look like rotor unba lance:
r Excessive Bearing Clearancer Bent S haf t or Rotor
r Load or Electrica l Infl uence
r Gea r P i tch Line Runout
r Misalignment or Other Preload
r Cra cked Sha f t
r Soft Foot
r Locked Coupling
r G yroscopic Effects
r Complia nt Support or Founda tion
Thus, the first step in any balancing project is to properly diagnose the root
cause of mecha nical behavior. The ma chinery diagnostician must be reasona blyconfident that the problem is mass unbalance before proceeding. If this step is
ignored, then the balancing work may temporarily compensate for some other
malfunction; with direct implications for excessive long-term forces acting upon
the rotor assembly.
7/30/2019 Chapter 11 Balancing
3/102
Before Balancing 537
Balancing speed, load, and temperature are very important consider-a tions. The bala ncing speed should be representa tive of rota tional un bala nce at
operating conditions yet free of excessive phase or amplitude excursions that
could confuse either the measurements, or the balance calculations. This meansthat the rotational speed vectors should remain constant within the speed
domain used for balancing. It is highly recommended that balancing speeds be
selected tha t a re significa ntly removed from a ny a ctive system resonance. This is
easily identified by examination of the Bode plots, and the selection of a speed
tha t resides within a plat eau region w here 1X amplitude and pha se rema in con-
stant. I t should be recognized that in some cases, the field balancing speed may
not be equa l to th e normal opera ting speed. Again, t his can only be determined
by a know ledgea ble examina tion of the synchronous tra nsient speed dat a .
In most insta nces, the tra nsmitted load a nd operating temperature
a re
concurrent considerations. Balancing a cold rotor under no load may produce
quite different results from balancing a fully heat soaked rotor at full process
loa d. In ma ny ca ses, the ma chine will be reasonably insensitive to the effects of
loa d a nd temperat ure. On other unit s, such as lar ge turbine genera tor sets, these
effects ma y be a pprecia ble. In order to underst a nd t he specific char a cteristics of
any machinery train, the synchronous 1X vibration vectors should be tracked
from fu ll speed no l oad
, t o fu l l speed f ul l load
operation at a ful l h eat soak
. This
should be a continuous record t ha t includes process t empera tur es an d load infor-
ma tion. If discrete 1X vectors are a cquired at the beginning an d end of the loa d-
ing cycle, the diagnostician has no visibility of how the machine changed from
one condition t o the other. Hence, the a cquisit ion of a deta iled time r ecord (prob-
ably computer-based) is of paramount importance. In some cases, the field bal-
a nce corrections will be specifi cally directed at reducing t he residual unba lance
in the rotor(s). In other situations, the installation of field balance weights may
compensate for a residual bow, or the effects of some load or heat related mecha-
nism. These should be knowledgeable decisions obtained by detailed examina-tion of the synchronous response of the machine during loading.
Mecha nical confi gura tion an d constr uction of the rotor must be reviewed to
determine the mode shape
a t operat ing speed, plus the loca tion a nd a ccessibil-
ity of potential balance planes. The mode shape must be understood to select
rea listic ba la nce correction pla nes, and t o provide guida nce in the loca tion of cor-
rection weights. As discussed in chapter 3, the mode shape may be determined
by field measurements, by analytical calculations, or a suitable combination of
the t wo t echniques. If a m odally insensitive balan ce plane is selected, the a ddi-
tion of field ba lance weights will be tota lly ineffective. In some situa tions, weight
changes a t couplings, or holes drilled on the outer dia meter of thrust collars ma y
never be suffi cient for field ba lancing a ma chine. In t hese ca ses, the fi eld ba lan c-
ing efforts a re futile, a nd t he ma chine should be disassembled for shop bala ncing
of the rotor (low or high speed) a t modally sensitive la tera l loca tions.Field weight corrections
are achieved by various methods depending
upon t he ma chine, and t he ava ilable bala nce planes. For exam ple, it is common
to add or remove balancing screws, add or remove sliding weights, add washers
to t he coupling, weld w eights on th e rotor, or drill/grind on th e rotor element . The
7/30/2019 Chapter 11 Balancing
4/102
538 Chapter-11
use of bala nce screws in an OEM ba lance pla ne is usually a sa fe correction. It is
good practice to use an a nti-seize compound on t he screw t hread s (manda tory for
stainless steel weights screwed into a stainless steel balance disk). In some
cases, steel w eights ma y not be heavy enough for th e required ba lance correction.In t hese situa tions, consider the use of tungst en alloy ba lance weights th a t ha ve
nearly t wice the density of steel weights.
The sliding weights employed on the fa ce of ma ny t urbine wheels fi t int o a
circumferential slot, and are secured in place with a setscrew. These weights
have a trapezoidal cross section to fit semi-loosely into the trapezoidal slot. The
setscrew passes through the balance weight, and into the axial face of the tur-
bine wheel. Tightening th e setscrew locks t he w eight between t he a ngled wa lls of
the slot a nd t he wh eel. Norma lly, each bala nce slot of this ty pe has only 2 loca -
tions for insertion of the weights. Depending on the w eights a lready insta lled in
the slot, it ma y be easier to insta ll the w eights from one side versus t he other.
The ad dition of coupling w a shers carr ies disadva nta ges, such as the loss of
the washers during future disassembly, or the mis-positioning of the washers
during fut ure re-a ssemblies. For t he most pa rt, a ddition of coupling w a shers rep-
resents a temporary balance weight correction measure. This may be the most
a ppropria te wa y to get a ma chine up and run ning in the middle of the night; but
more permanent corrections should be made to the coupling or rotor assembly
during th e next overhaul.
The insta llat ion of U-Sha ped w eights is a common practice on units such as
induced or forced dra ft fa ns. These weights a re temporarily a tt a ched t o the outer
diameter of the fan center divider plate, or a shroud band, using an axial set-
screw. After verification that the weights are correct, the balance weights are
typically w elded t o the rotor section. In a ll ca ses, w elding ba lan ce weights on the
rotor should be performed carefully. On sensitive machines, the weight of the
welding rod (minus fl ux) should be included in th e tota l w eight for the ba lan ce
correction. In addition, the ground connection from the welding machine must beattached to the rotor close to the location of the balance weight. Under no cir-
cumsta nce should the gr ound wire be connected to the ma chine casing, bea ring
housing, or pedestal. This will only direct the welding machine current flow
thr ough the bearings, with a str ong probability of immediat e bearing da ma ge.
Furthermore, the machinery diagnostician must always be aware of the
metallurgy
of the fan rotor, and the balance weights. On simple carbon steel
a ssemblies, virtua lly an y q ua lified w elder w ill be a ble to do a good job wit h com-
monly available welding equipment. On more exotic metal combinations, the
selection of the proper rod, technique, and welding machine must be coupled
with a fu lly qua l ifi ed welder for tha t physical confi gurat ion.
For drilling or grinding on a machinery rotor, low stress areas must be
selected. Mechanical integrity of the rotor should never be compromised for a
balance correction. The rotor material density should be known, so that thea mount of weight r emoved ca n be computed by knowing t he volume of ma teria l
removed. Finally, the location of angles for weight corrections should be the
responsibility of the individua l performing the ba lancing w ork. It is easy t o mis-
interpret a n a ngular orienta tion and dr ill the right hole in the w rong pla ce. Mis-
7/30/2019 Chapter 11 Balancing
5/102
Standardized Measurements and Conventions 539
ta kes of this t ype are expensive, and t hey a re tota lly unnecessary.
Fina lly, there are individuals w ho firm ly believe tha t ba lancing will provide
a cure for all of their mechanical problems. The attitude of l ets go ahead and
th r ow in a bal ance shotis prevalent in some process industries. Obviously thisphilosophy will be correct when the problem really is mass unbalance. However,
this can be a da ngerous a pproach to apply towa rds a ll conditions. B a sica lly, if the
problem is unba la nce, th en go bala nce the rotor. If the problem is someth ing else,
then go figure out the real ma lfunction.
S
TANDARDIZED
M
EASUREMENTS
AND
C
ONVENTIONS
Before embarking on any discussion of balancing concepts, it is highly
desirable to esta blish and ma inta in a common set of measurements a nd conven-
tions. These sta nda rdized rules will be a pplied t hroughout this bala ncing cha p-
ter, a nd t hey a re consistent wit h t he rema inder of this t ext. As expected, vectors
are used for the 1X response measurements and calculations. Vectors are
described by both a ma gnitude a nd a direction. For insta nce, a ca r driven 5 miles
(magnitude) due West (direction) defines the exact position of the vehicle with
respect to the st a rt ing point. For vibra tion measur ements, a runn ing speed vec-
tor quanti ty stated as 5.0 Mils ,
p-p
(magnitude) occurring at an angle of 270
(direction) defines t he am ount, and a ngular location of the high spot. In an y ba l-
a ncing discipline, both qua ntit ies are n ecessary to properly defin e a vector.
As discussed in chapter 2, circular functions, exponential functions, and
inphase-quadrature terms may be used interchangeably. Although conversion
from one forma t to a nother can be performed, this does unnecessa rily complica te
the ca lculat ions. Within this chapter, vectors w ill be expressed a s a ma gnitude,
w ith a n a ngle presented in d egrees (1/360 unit circle). Angula r mea surement s in
ra dians, gra ds, or other units will not be used. Vector a mplitudes will vary wit hthe specific quantity to be described. For shaft vibration measurements, magni-
tudes will be presented as Mils (1 Mil equals 0.001 Inches), peak to peak. This
will generally be abbreviated as Mils,
p-p
. Ca sing measur ements for velocity w ill
carry magnitude units of Inches per Second, zero to peak, and will be abbrevi-
a ted as IPS ,
o-p
. Finally, casing vibration measurements made with accelerome-
ters w ill be shown a s G s of accelerat ion (1 G equa ls the a ccelera tion of gra vity),
a nd zero to peak va lues will be used. Accelera tion ma gnitudes w ill generally be
abbreviat ed as G s ,
o-p
.
All balance weights, trial weights, and calibration weights must be
expressed in consistent units within each balance problem. Typically, small
rotors will be bala nced wit h w eights m easured in gra ms. Large rotors will gener-
ally require larger balance weights, and units of ounces (where 1 ounce equals
28.35 gram s), or pounds (wh ere 1 pound eq ua ls 16 ounces or 453.6 gram s) will be
used. It is always desirable to both calculate the weight of a correction mass
(density times volume) plus place the correction mass on a calibrated scale
and weight it directly. This is certainly a belt and suspend er s
approach, but it
7/30/2019 Chapter 11 Balancing
6/102
540 Chapter-11
does prevent embarr a ssing mista kes, and th e potential insta llat ion of the w rong
weight at the right location.
In the following pages, balance sensitivity vectors will be calculated. The
magnitude units for these vector calculations will consist of weight (or mass)divided by vibra tion. For inst a nce, unit s of G ra ms/Mils,
p-p
w ould be used for sen-
sitivity vectors associated with most rotors. Occasionally, these vectors may be
inverted to yield units of Mil,
p-p
/G ra m. This forma t s ometimes provides a n
improved physical significance or meaning. However, the diagnostician should
always remember that these are vector quantities. I f you invert the magnitude,
then t he an gle must a lso be corrected to be mat hema tically correct. In a ddition,
the ba lance equat ions a re tota lly interlocked to the bala nce sensitivity vectors. If
someone begins to casua lly invert sensitivity vectors, the equa tion str ucture w ill
become completely violat ed.
In some situations, a radial length may be included to define the radius of
the balance weight from the shaft centerline. This allows more flexibility in
selection of the final weight and associated radius. For instance, if a rotor bal-a nce sensitivit y is 50 G ra m-Inches/Mil,
p-p
, and the measured vibration ampli-
tud e is 2.0 Mils,
p-p
; then the product of these two quantities would be a balance
corr ection of 100 G ra m-Inches. This ma y be sa tisfi ed by a correction w eight of 20
gra ms a t a ra dius of 5 inches, or by a weight of 4 gra ms a t a 25 inch ra dius.
Generally, the magnitude portion of the vector quantities is easily under-
stood a nd a pplied. The ma jor diffi culty usua lly resides w ith t he phase mea sure-
ments and the associated angular reference frame. Part of the confusion is
directly related to the function and application of the timing mark, or trigger
point. In all cases, the timing signal electronics provide nothing more than an
accurat e and consistent ma nner to re lat e the rotat ing element back to the sta -
tionary ma chine. Within t his text, t he ma jority of the synchronous t iming signa ls
will be based upon a proximity probe observing a notch in the shaft, or a projec-
tion such a s a sha ft key. In either case, the resultan t signa l emitted by the prox-imity timing probe will be a function of the average gap between the probe and
the observed sha ft sur face.
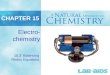
As discussed in cha pter 6, a K eyphasor probe will produce a nega tive
going pulse when th e tra nsducer is positioned over a notch or keywa y a s shown
in Figs. 11-1 and 11-2. In a simila r ma nner, th e Keypha sor proximity probe will
generate a positive going pulse when it observes a projection or key as shown in
Figs. 11-3 and 11-4. The actual trigger point is a function of the instrument that
receives the pulse signa l. This device ma y be a sy nchronous tra cking Digita l Vec-
tor Filter (DVF), a Dynamic Signal Analyzer (DSA), or an oscilloscope. All of
these traditional instruments require the identification of a positive or a nega-
tive slope for t he trigger, plus t he trigger level within t ha t s lope. In ma ny ca ses,
the devices are set for an Aut o Tri gger
position, which automatically sets the
trigger a t the ha lfwa y point of the selected positive or nega tive slope.
The physica l significance of the tr igger point is illustra ted by th e diagra ms
in Figs. 11-1 through 11-4. In all eight cases, the actual trigger point is estab-
lished by the coincidence of the physical shaft step and the proximity probe. For
7/30/2019 Chapter 11 Balancing
7/102
Standardized Measurements and Conventions 541
a n instr ument set to trigger off a nega tive slope, the Keypha sor probe is essen-tially centered over the leading edge of the notch as shown in Fig. 11-1. For a
tr igger off a positive slope, th e Keypha sor probe is cent ered over th e tra iling
edge of the notch a s sh own in Fig. 11-2.
This positioning between the stationary and the rotating systems is not
that critical for machines with large shaft diameters. However, on rotors with
small sha f t d iameters, the esta bl ishment o f an a ccurat e tr igger point is ma nda-
tory. For exam ple, on a 2 inch dia meter sha ft, if t he t rigger point is off by 1/4
inch, this is equivalent to a 14 error. If this error is encountered during the
placement of a bala nce correction w eight, the results w ould proba bly be less t ha n
desirable. Hence, the establishment of an accurate trigger point is a necessary
requirement for successful bala ncing.
The diagrams presented in Figs. 11-3 and 11-4 describe the trigger condi-
tion for a positive going pulse emitt ed by a tim ing probe observing a projection or
Fig. 111 Negative Trigger Slope With Slot
Fig. 112 Positive Trigger Slope With Slot
Fig. 113 Positive Trigger Slope With Key
Fig. 114 Negative Trigger Slope With Key
CCW Rotation CWRotatio
n
KeyphasorTrigger
Point
Trigger AtLeading
Edge of Slot
CCW Rotation CWRotatio
n
KeyphasorTrigger
Point
Trigger AtTrailing
Edge of Slot
CCW Rotation CWRotatio
n
KeyphasorTriggerPoint
Trigger AtLeading
Edge of Key
CCW Rotation CWRotatio
n
KeyphasorTriggerPoint
Trigger AtTrailing
Edge of Key
7/30/2019 Chapter 11 Balancing
8/102
542 Chapter-11
other ra ised surface such a s sha ft key. Again, t he trigger point is esta blished by
the coincidence of the sha ft st ep and the proximity probe. For a n inst rument set
to tr igger off a positive slope, th e Keypha sor probe is essentia lly cent ered over
the leading edge of the key as in Fig. 11-3. For a trigger off a negative slope, theKey probe is centered over the t ra iling edge of th e key as s hown in Fig. 11-4.
As noted, ea ch trigger point exa mple is illustra ted w ith a clockwise a nd a coun-
terclockw ise exam ple. Typically, th e ma chine rota tion is observed from t he driver
end of the t ra in, and t he appropria te Keypha sor confi gura tion (i.e. , notch or
projection), is combined with an instrument setup requirement for a positive or a
negative trigger slope. This combination of parameters allows the selection of
one of the eight previous diagrams as the unique and only trigger point for the
ma chine to be bala nced.
In passing, it should also be mentioned that the use of an optical Keypha-
sor observing a piece of refl ective ta pe on the sha ft w ill produce a positive going
with most optical drivers. Hence, the optical trigger signals will be identical to
the drawings shown in Fig. 11-3 and 11-4. Also be advised that reflective tape
will not a dhere to high speed rotors. Depending on t he sha ft dia meter, a limit of
15,000 to 20,000 RPM is typical for acceptable adhesion of most reflective tapes.
For ba lancing of units a t higher speeds tha t r equire an optica l Key , the use of
reflective paint on the shaft is recommended. Additional contrast enhancement
may be obtained by spray pa inting the shaf t with dull black paint or layout blu-
ing. This da rk ba ckground combined wit h t he reflective paint or ta pe will yield a
strong pulse signa l under virtua lly a ll conditions.
Regar dless of the source of the Keypha sor , the diagnostician m ust a lwa ys
check the clarity of the signal pulse on an oscilloscope. A simple time domain
observat ion of this pulse will identify if t he volta ge levels a re suffi cient t o drive
the analytical instruments (typically 3 to 5 volts, peak). Next, the time domain
signal w ill revea l if there a re a ny n oise spikes or other electr onic glitches
in the
signal. Most of these interferences a re due to some problem w ith the t ra nsducerinsta llat ion, and w ill have to be corrected back at the t iming probe.
There are conditions where baseline noise on the presumably flat part of
the t rigger curve ma y be corrected with external volta ge amplifiers. In t his com-
mon ma nipulation, the direct pulse signal is pa ssed thr ough a DC coupled volt-
age amplifier, and the bias voltage adjusted (plus or minus) to flatten out the
baseline. Next, th e signal is pa ssed thr ough a n AC coupled volta ge am plifi er a nd
the signal gain is increased to provide a suitable trigger voltage. Naturally, the
outputs of both amplifiers should be observed on an oscilloscope to verify the
proper results from both amplifiers (e.g., Fig. 8-8). This same procedure may be
used to clean u p a signa l from a t a pe recorder. The fi na l objective must be a clea n
a nd consistent tr igger rela tionship betw een t he ma chinery a nd t he electronics.
Once a unique trigger point has been established, the rotor is physically
rolled under the Key probe to sat isfy this t rigger condition. At this point, anangular coordinate system is established from one of the vibration probes. For
example, consider the diagram presented in Fig. 11-5 for vibration probes
mounted in a true vertical orientation. In all cases, the angular coordinate sys-
tem is in i t iated with 0 at the vibrat ion probe, and the angles always increase
7/30/2019 Chapter 11 Balancing
9/102
Standardized Measurements and Conventions 543
against rotation. Fig. 11-5 describes the angular reference system for both a
counterclockwise, and a clockwise rotating shaft. Another way to think of this
angular coordinate system is to consider the progression of angles as the shaft
rotates in a normal direction. Specifically, if one observes the rotor from the per-
spective of the probe tip, and the shaft is turning in a normal direction, the
a ngles must a lwa ys increase. This ty pe of logic is ma nda tory for a proper correla -
tion betw een th e machine, a nd t he resultant polar plots of tra nsient motion, and
orbit plots of stead y sta te motion.
If the vibration probes are located at some other physical orientation, the
logic remains exactly the same. The 0 position remains fixed at the vibration
transducer, and the angles are laid off in a direction that is counter to the shaft
rotation. For probes mounted at 45 to the left of a true vertical centerline, the
a ngular coordinat e system for a counterclockwise a nd a clockwise rota ting sha ft
a re present ed Fig. 11-6.
All vibra tion vector an gles from slow roll to full speed a re referenced in t hismanner. All trial weights, calibration weights, and balance correction weights
a re referenced in t his sa me ma nner. The ma ss unba lan ce loca tions a re a lso refer-
enced with this same angular coordinate system. Differential vectors and bal-
ance sensitivity vectors also share the exact same angular coordinate system.
Although this may seem like a trivial point, it is an enormous advantage to
maintain the same angular reference system for all of the vector quantities
involved in the field balancing exercise.
A minor va ria tion exists w hen X-Y probes are inst a lled on a ma chine. If a ll
of the angles are reference to the Vertical or Y-axis probes, there will be a phase
difference between measur ements obtained from the X a nd th e Y tr a nsducers. If
the m a chine exhibits forwa rd circula r orbits, a 90 phase difference will be exhib-
ited at each bearing. This normal phase difference causes only a minor problem.
It is recommended that one set of transducers, for example the Y probes, be usedas the 0 reference as previously discussed. The vibration vectors measured by
the X probes would be directly acquired, and measured angles used in the bal-
ancing equations. Since the calibration weights are referenced to the Y probes,
th e result s fr om th e X probes w ill be self-corr ected. This concept w ill be demon-
Fig. 115 Angular Convention With TrueVertical Vibration Probes
Fig. 116 Angular Convention With Verti-cal Probes At 45Left of Vertical Centerline
CWRotation
CCWRotation
0
45
90
135
180
225
270
315
0
45
90
135
180
225
270
315
CWRotation
CCWRotation
0
45
90
135
180
225
270
315
0
45
90
135
180
225
270
315
7/30/2019 Chapter 11 Balancing
10/102
544 Chapter-11
strated in the case history 37 presented immediately after the development of
the single plane ba lancing equa tions. Additional expla na tion of this cha ra cteris-
tic will a lso be provided in case hist ory 38 on a fi ve bea ring t urbine genera tor set.
The fi na l concept t ha t m ust be underst ood is the relationship betw een th e
H eavy Spot
and the H igh Spo
t. As discussed in previous chapters, the rotor
H eavy Spot
is the point of effective residual mass unbalance for the rotor (or
wheel). As shown in Figs. 11-7 and 11-8, the H eavy Spot
main ta ins a fi xed angu-
lar position wit h r espect to t he vibrat ion probe. Regardless of the m a chine speed
(i.e., below or above a critical speed), a constant relationship exists between the
vibrat ion probe and th e H eavy Spot
. This is th e angula r loca tion wh ere weight is
removed to bala nce the rotor (110 in t his exam ple). Weight ma y a lso be a dded a t
290 in this example to correct for the H eavy Spot
unba lan ce a t 110. This is th e
logic behind t he low speed proximity probe bala ncing rule of:
At speeds well below th e crit ical,r emove weight at t he phase angl e,
or add weight at th e phase angle plus 180
The H eavy Spo
t and the H igh Spot
a re coincident a t slow rota tional speeds
that are well below any shaft critical (balance resonance) speeds. Whereas the
H eavy Spot
is indica tive of the lumped residual unba lance of the rotor, the H ighSpot
is th e high point measur ed by t he sha ft sensing proximity probe. This is t he
angular location that maintains the minimum distance between the rotor and
the sha ft during ea ch revolution.
As rotor speed is increased, the unit passes through a balance resonance
(critical speed). For a lightly damped system, the observed H igh Spot
passes
thr ough a nominal 180 phase shift . This chan ge is due to the r otor performing a
self-bala ncing action w here the center of rotat ion migra tes from t he origina l geo-
metr ic center of t he rotor t o the ma ss center, as shown In F ig. 11-8. The proxim-
Fig. 117 Heavy Spot Versus High Spot AtSpeeds Well Below The Critical Speed
Fig. 118 Heavy Spot Versus High Spot AtSpeeds Well Above The Critical Speed
Probe@ 0
90
180
270
MassCenter
GeometricCenter
Center ofRotation
HeavySpot
HighSpot
CCWRotation
Phase= 110
AddWeightLocation
RemoveWeight
Location
Probe@ 0
90
180
270
MassCenter
GeometricCenter Center of
Rotation
HeavySpot
CCWRotation
Phase= 290
HighSpot
ddeight
Location
RemoveWeight
Location
7/30/2019 Chapter 11 Balancing
11/102
Combined Balancing Techniques 545
i ty probe can only measure distances, and it observes the shift through the
critical speed as a change of 180 in th e H igh Spot
. The probe ha s no idea of the
locat ion of the m a ss unba lance, it only r esponds to th e change in dist a nce. This
behavior is the logic behind the t ra ditional proximity probe bala ncing rule of:
At speeds well above th e cri ti cal,add weight at th e phase angl e,
or r emove weight at th e phase angle mi nu s 180
Clea rly, a compa rison of Fig. 11-7 wit h 11-8 reveals t ha t t he H eavy Spot
ha s
rema ined in the same loca tion at 110. Removing an equiva lent weight a t 110 or
adding an equivalent weight to 290 will result in a balanced rotor. For addi-
tional explana tion of this classic behavior through a critica l speed, the reader is
referenced back to the description of the J effcott r otor presented in cha pter 3 of
this text. In addition, the presence of damping and mechanisms such as com-
bined sta tic and couple unba lance will alt er the a bove genera l rule.
C
OMBINED
B
ALANCING
T
ECHNIQUES
The measur ements a nd st an da rdized conventions provide the ba sis for dis-
cussing unbalance corrections. It would be convenient if these concepts could be
formed into a set of balancing procedures that are universally applicable to all
ma chines and situa tions. U nfort una tely, such a pa na cea does not exist, a nd a ddi-
tional considerat ion must be given to the a ctua l fi eld bala ncing techniques. Over
the y ears, va rious successful techniques have been developed w ithin t he ma chin-
ery community. In 1934, the original influence coefficient vector approach was
described by E.L. Thearle
1
of G eneral Electric. Rona ld Eshlema n
2
of the I llinois
Ins tit ut e of Technology, completed his in itia l work on meth ods for ba la ncing fl ex-ible rotors in 1962. Ba lancing w ith sh a ft orbits w a s published in 1971 by Ch a rles
Jackson
3 of Monsanto. The combination of modal and influence coefficient tech-
niques was presented in 1976 by Edgar Gunter4, et. al . , U niversity of Virginia.
Variable speed polar plot balancing was introduced by Donald Bently 5, Bently
Nevada in 1980. Certa inly there ha ve been ma ny other contr ibutors to this fi eld;
and today t here are a varie ty o f balancing techniques a vai lable.
1 E.L. Thearle, Dyna mic Ba lancing of Rotat ing Ma chinery in the Field, Tran sactions of theAm er ican Society of Mechani cal Engi neers, Vol. 56 (1934), pp. 745-753.
2 R. Eshelman, Development of Methods and Equipment for Balancing Flexible Rotors,Armour Research Foundati on, Il l in ois Instit ute of Technology, Final Report NOB S C ontract 78753,Ch icago, Illinois (May 1962).
3
Cha rles J ackson, Bala nce Rotors by Orbit Analysis , H ydr ocar bon Pr ocessin g, Vol. 50, No. 1(Ja nua ry 1971).4 E.J. Gunter, L.E. Barret t , and P.E. Allaire, Balancing of Mult imass Flexible Rotors, Pro-
ceedin gs of t he Fift h Tu rbomachinery Symposium, Ga s Turbine La borat ories, Texas A&M U niver-sit y, College S ta tion , Texa s (October 1976), pp. 133-147.
5 Donald E. B ently, Polar P lot t ing Applicat ions for Rotat ing Ma chinery, Proceedi ngs of th eVibrat ion I nst i tute Machinery Vibrat i ons IV Semi nar, Cherr y H ill, New J ersey (November 1980).
7/30/2019 Chapter 11 Balancing
12/102
546 Chapter-11
The real key to success resides in selecting the techniques most applicable
to the machine element requiring balancing and performing that work in a
timely a nd cost-effective ma nner. There is an old a da ge tha t st a tes: i f your only
tool is a h ammer, then al l of your pr oblems begin to resemble nail s. This is par tic-ularly true in the field of onsite rotor balancing. If you only use one specific tech-
nique, your options a re very limited, and you ha ve no recourse w hen a ma chine
misbehaves. The balancing techniques used for high speed rotors should inte-
gra te t he concepts of modal behavior, varia ble and consta nt speed vibrat ion mea -
surements, plus balance calibration of the rotor to yield discrete corrections.
Although these topics may be considered as separate entities, they are all
addressing the same fundamental mass distribution problem. The integrated
balancing approach discussed herein attempts to use the available information
to provide a logical assessment of field balance corrections.
Initia lly, a correct understa nding of the modal behavior is importa nt for tw o
reasons. First, it helps to identify balance planes with suitable effectiveness
upon the residual unbalance. Secondly, it provides direction as to whether the
weight correction should be a dded or removed a t a part icular phase a ngle. The
mode sha pe ca n be determined ana lytically, or experimenta lly by vibrat ion mea -
surements. Ideally, the analytical calculations should be substantiated by vari-
a ble speed fi eld vibra tion measur ements to confi rm t he presence, and locat ion of
system critica l speeds.
The next step consists of using vibration response measurements to help
identify the lateral and angular location of rotor unbalance. In a case of pure
mass unbalance, the runout compensated vibration angles will be indicative of
the a ngular location of the un bala nce. In the presence of other forces, amplitude
and angular variations will occur. However, the relative vibration amplitudes
will help to identify t he offending lat eral correction plan es, a nd t he vector a ngles
provide a good sta rt ing point for an gular weight loca tions.
U nless previous bala ncing informat ion is ava ilable, it is usua lly difficult toanticipate the amount of unbalance. For this reason, many field balancing solu-
tions gravi tat e towar ds the I nfluence Coeffici entmeth od for ca lculat ion of correc-tion weights. Applying this t echnique, the mecha nical system is ca librat ed with a
know n weight placed at a know n a ngle. Assuming a r easonably linear sy stem (to
be discussed), the response from the ca librat ion or t ria l w eights a re used to com-
pute a balance correction that minimizes the measured vibration response
a mplitudes a t t he bala ncing speed.
It should be recognized tha t t he bala ncing ca lculat ions a re precise, but t hey
are based upon values that contain different levels of uncertainty. Hence, it is
always best to run the calculations with the best possible input measurements,
and then make reasonable judgments of the actual corrections to be imple-
mented on the ma chine. In some cases contr a dictions will a ppea r in t he results,
and the individual performing the balancing will have to exercise judgment inselecting corrections that make good mechanical sense.
The follow ing sections in th is chapter w ill address t he typical ba lancing cal-
cula tions tha t can be performed. The presented vector bala ncing equat ions ca n
be programmed on pocket calculators or personal computers. In fact, operational
7/30/2019 Chapter 11 Balancing
13/102
Linearity Requirements 547
progra ms h ave been a vaila ble for m a ny y ears. The use of porta ble persona l com-
puters equipped with spreadsheet programs a re idea l for t his type of w ork. It is
acknowledged that the calculator programs or computer spreadsheets are only
as good a s the ba lancing softw ar e. I t is a lways desira ble to fully understand t hesoftware package, and test it with previously documented balance calculations
a nd/or a mecha nical simu la tion device (e.g. rotor kit), w here th e integrit y a nd
operat ion of the softw a re can be verified in a noncritical environment.
The fi na l point in a ny fi eld bala nce consists of documenta tion for fut ure ref-
erence. In some cases, if a unit requires a field balance, chances are good that
periodically th is ma chine ma y ha ve to be rebala nced. If everything is fully docu-
mented, the know ledge gained a bout t he behavior of this par ticular m a chine will
be useful during the next balance correction. The engineering files should con-
tain all of the technical information, and notes that were generated during the
execution of the balancing. This file should be complete enough to allow recon-
struction of the entire balancing exercise.
Aga in, it must be resta ted tha t successful fi eld bala ncing rea lly requires an
unbalanced rotor. The mechanical malfunctions listed at the beginning of this
chapter wil l exhibit many symptoms that may be in terpreted as unbalance.
However, ca reful exam inat ion of the dat a will often a llow a proper identifi cat ion
of the occurring m a lfunction, and t reat ment of the a ctua l mecha nical problem.
LINEARITY REQUIREMENTS
Traditional balancing calculations generally assume a linear mechanical
syst em. For a system to be considered linear, three basic conditions must be sat -
isfi ed. First , if a s ingle excita tion (i.e. , mass unba lance) is a pplied to a system, a
single response (i.e., vibra tion) ca n be expected. If the fi rst excita tion is removed,
and a second excitation applied (i.e., another mass), a second response willresult. I f both excita tions ar e simulta neously a pplied, the resulta nt response will
be a s uperposition of both response functions. Hence, a n ecessa ry condit ion for a
syst em to be considered linear is tha t t he pr in ciple of super posit ionapplies.The second requirement for a linear system is that the magnitude or scale
factor between the excitation and response is preserved. This characteristic is
sometimes referred to a s th e pr oper ty of homogeneit y, and must be sat isfied for asyst em to be linear. The th ird requirement for a linea r sy stem considers t he fre-
quency chara cteristics of dyna mic excita tions a nd responses. If the syst em exci-
tations are periodic functions, then the response characteristics must also be
periodic. In addition, the response frequency must be identical to the excitation
frequency; and t he system cannot generat e new fr equencies.Most rotating machines behave in a reasonably linear fashion with respect
to unba lan ce. Occasionally, a unit will be encountered t ha t violat es one or m oreof the three described conditions for linearity. When that occurs, the equation
array will fail by definition, and a considerably more sophisticated diagnostic
a nd/or a na lytical a pproach w ill be necessary. However, in ma ny insta nces a
direct t echnique ma y be used to determine the unba lance in a rota ting syst em.
7/30/2019 Chapter 11 Balancing
14/102
548 Chapter-11
Case History 36: Complex Rotor Nonlinearities
The machinery discussed in case history 12 will be revisited for this exam-
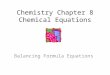
ple of nonlinea r m a chinery behavior. Reca ll tha t this unit consisted of a n over-hung hot gas expander wheel, a pair of midspan compressor wheels, and three
overhung steam turbine wheels6 as originally shown in Fig. 5-10. For conve-
nience, this same diagram is duplicated in Fig. 11-9. A series of axial through
bolts are used to connect the expander stub shaft through the compressor
wh eels, a nd into the tur bine stub shaft . In this ma chine, the rotor must be built
concurrently with the inner casing. Specifically, the horizontally split internal
bundle is assembled wit h t he compressor w heels, stub sha fts, plus bear ings, and
seals. The end casings a re a tt a ched, the expander wh eel is bolted into position,
a nd the turbine sta ges are mounted with a nother set of thr ough bolts.
The eight rotor segment s a re joined with Cur vic couplings. Alth ough each
of the segments a re component ba lanced, any m inor shift betw een elements w ill
produce a synchronous force. Since this unit operates at 18,500 RPM, a slight
unbalance or eccentricity will result in excessive shaft vibration. Furthermore,the distribution of operating temperatures noted on Fig. 11-9 reveals the com-
plex th erma l effects t ha t must be tolera ted by this rotor. The 1,250 F expander
inlet is followed by compressor temperatures in excess of 430F. The steam tur-
bine operat es with a 700F inlet, and a 160F exha ust.
By any definition, this must be considered as a difficult unit. As discussed
in case hist ory 12, the rotor pa sses thr ough seven resonances betw een slow r oll
and normal operating speed. These various damped natural frequencies were
summa rized in Ta ble 5-4. This r otor n ormally requires fi eld trim bala ncing aft er
every overhaul. Previous field balancing activities were successful when a two
step corr ection process wa s a pplied. The fi rst st ep consist ed of bala ncing at a pr o-
6 Robert C. Eisenman n, Some realit ies of field bala ncing, Orb i t, Vol.18, No.2 (J un e 1997), pp. 12-17.
Fig. 119 Combined Expander-Air Compressor-Steam Turbine Rotor Configuration
Balance Plane #120 Axial Holes
Balance Plane #220 Radial Holes
Balance Plane #320 Radial Holes
Balance Plane #430 Axial Holes
Expander
Wheel
Expander
Stub Shaft
2nd Stage
Compressor
1st Stage
Compressor
Turbine
Stub Shaft
1st Stage Turbine
Curvic#1
Curvic#2
Curvic#3
Curvic#4
Curvic #5
Curvic #6
Curvic #7
Journal 4.000" 5 Pads - LOP
6 Mil Diam. Clearance445# Static Load
ThrustFaces
Steam Inlet700F
Exhaust160F
AmbientAir Suction
1,250FInlet
220F SuctionExhaust700F
Rotation and AngularCoordinates Viewedfrom the Expander
Rotor Weight = 910 #Rotor Length = 77.00"
Bearing Centers = 45.68"
Journal 4.500" 5 Pads - LOP
7 Mil Diam. Clearance465# Static Load
2nd Stage Turbine
3rd Stage Turbine
430FDisch
arge
450FDischarge
6030
2X
2Y
6030
1Y
1X
CCW
Rotation
7/30/2019 Chapter 11 Balancing
15/102
Linearity Requirements 549
cess hold point of 14,500 RP M using t he outboar d ba la nce pla nes #1 and #4. This
was followed by a final trim at 18,500 RPM on the inboard planes #2 and #3
locat ed next t o the compressor w heels. I t ha d been repea tedly demonstra ted th a t
if the rotor was not adequately balanced at 14,500 RPM, it probably would notrun a t 18,500 RPM. H ence the plan t personnel were committ ed to performing a
fi eld bala nce at 14,500 as w ell as 18,500 RP M.
Although the high speed bala nce at full operat ing speed w a s rea dily a chiev-
able, the intermediate speed balance at 14,500 RPM was always difficult. In an
effort to improve the understanding of this machinery behavior, the historical
balancing records were reviewed, and transient vibration data was examined. In
a ddition, the da mped critica l speeds plus a ssociat ed mode shapes w ere computed
as previously discussed in case history 12.
One of the interesting aspects of this ma chine wa s the va ria tion in ba lance
sensitivity vectors at 14,500 RPM. As discussed in this chapter, the bal an ce sen-siti vit y vectorsprovide a direct relationship between the rotor mass unbalancevectors and the vibration response vectors. These vectors are determined by
installation of known t r i a lor cal ibrationweights at each of the balance planes,a nd measur ing the resultan t sha ft vibra tion response. Suffice it t o say, these bal-
a nce sensitivity vectors must rema in reasona bly consta nt in order for th e vector
bala ncing calcula tions to be correct. For t his pa rticular rotor, thr ee sets of sensi-
tivity vectors w ere computed from t he ava ilable historica l informa tion a t 14,500
RP M, and the r esults of these vector ca lculat ions a re summ a rized in Ta ble 11-1.
Since this rotor conta ins tw o measurement pla nes, a nd four bala nce correc-
tion planes, a total of eight balance sensitivity vectors were computed using
equation (11-17). The first balance sensitivity vector identified as S11in Table
11-1 defines the vibration response at measurement plane 1, with a calibration
w eight insta lled a t ba lance plane 1. Simila rly, sensitivity vector S12specifi es the
vibrat ion response at measur ement plane 1, w ith a w eight at ba lance plane 2,
Table 111 Balance Sensitivity Vectors Based On Steady State Data At 14,500 RPM
S VectorData Set #1
(Grams/Mil,p-p @ Deg.)Data Set #2
(Grams/Mil,p-p @ Deg.)Data Set #3
(Grams/Mil,p-p @ Deg.)
S11 20.3 @ 139 16.2 @ 179 Not Avai l able
S12 48.1 @ 34a
a Sha ded vectors of quest ionable a ccuracy due t o small differential vibrat ion vectors with weights .
22.6 @ 309 76.4 @ 233
S13 42.6 @ 211 14.7 @ 177 24.6 @ 200
S14 34.1 @ 259 41.7 @ 289 16.2 @ 305
S21 18.3 @ 308 13.4 @ 345 Not Avai l able
S22
19.1 @ 168 18.5 @ 142 18.6 @ 160
S23 32.3 @ 258 20.2 @ 269 31.2 @ 221
S24 24.2 @ 83 20.3 @ 147 14.9 @ 142
7/30/2019 Chapter 11 Balancing
16/102
550 Chapter-11
a nd so forth th roughout t he remainder of the ta bular sum ma ry. The tw o shaded
vectors in Ta ble 11-1 ar e of quest ionable a ccura cy due to the fa ct th a t t he differ-
ential vibration vector was less than 0.1 Mils,p-p. This small differential vibra-
tion is indica tive of minima l response to the a pplied weight, an d th e validity ofthe particular balance sensitivity vector is highly questionable. On much larger
ma chines, the va lidity of the sensitivity vectors w ould be considered mar ginal if
the differential vibra tion vectors w ere less t ha n 0.5 or perha ps 1.0 Mil,p-p. How-
ever, for this small, high speed rotor, a differential shaft vibration value of 0.1
Mils,p-p wa s considered to be a n a ppropria te lower limit.
Exa minat ion of the remaining Svectors in Ta ble 11-1 revea ls some sim ila r-ities, but the overall variations are significant. For instance, the magnitude of
S12varies from 22.6 to 76.4 Grams per Mil, p-p, and a 76 angular difference is
noted. On S24the a mplitudes change from 24.1 to 14.9 Gr am s per Mil,p-p, but t he
angles reveal a 59 spread. At this point, a preliminary conclusion might be
reached tha t t his rotor is indeed nonlinear a nd cannot be field bala nced.
Furt her review sh owed tha t t he vibrat ion response vectors used for ba lanc-ing were acquired at a process hold point of 14,500 RPM. Under this condition,
the machine speed was held constant, but rotor and casing temperatures were
changing as the process stabilized. This could be a major contributor to the
sprea d in sensitivit y vectors in Ta ble 11-1. Att empting t o ba la nce a ma chine wit h
these variable coefficients is difficult at best, and many runs are required to
at ta in a ba rely a ccepta ble balance state .
Fig. 1110 Bode Plot OfY-Axis Probes During ATypical Machine Startup
450
400
350
300
250
200
4,000 6,000 8,000 10,000 12,000 14,000 16,000 18,000
PhaseLag(Degrees)
40
90
Expander Bearing
Probe #1Y
Turbine Bearing
Probe #2Y
0.0
1.0
2.0
3.0
4.0
5.0
4,000 6,000 8,000 10,000 12,000 14,000 16,000 18,000
D
isplacement(Mils,p-p)
Rotational Speed (Revolutions/Minute)
Turbine Bearing
Probe #2Y
Expander Bearing
Probe #1Y
Mode @
7,800 RPM
Process Hold @
14,500 RPM
Full Speed @
18,500 RPM
7/30/2019 Chapter 11 Balancing
17/102
Linearity Requirements 551
Va ria ble speed vibra tion response vectors w ere extra cted from th e histori-
cal da ta base, and a typical sta rt up Bode is presented in Fig. 11-10. This da ta dis-
plays the Y-Axis probes from both measurement planes. Both plots are corrected
for slow roll runout, and t he resulta nt da ta is representa tive of the true dyna micmotion of the shaft at each of the two lateral measurement planes. The major
resona nce occurs at a pproximat ely 7,800 RP M, which is consistent wit h t he ana -
lytical results discussed in case history 12. It is significant to confirm that the
process hold point at 14,500 RPM displays substantial amplitude and phase
excursions. This is logically due to the heating of the rotor and casing, plus vari-
ations in settle out of the operating system (i.e., pressures, temperatures, flow
ra tes, and molecular weights). Although this process st a bilizat ion is a necessary
part of the sta rtu p, the var iat ions in vibra tion vectors negat es the validity of this
informa tion for use as repetitive bala nce response dat a .
At speeds above 14,500 RPM, there are additional vector changes, and a
desirable platea u in t he a mplitude and phase curves does not a ppea r. The only
consist ent a rea of essent ia lly fl a t levels occurs in t he vicinity of 14,000 RP M. To
test the validity of this conclusion, individual vectors at 14,000 RPM were
extra cted from t he historica l tr a nsient st a rtu p fi les. These displacement vectors,
in conjunction w ith the inst a lled w eights, were used to re-compute t he ba lance
sensitivity vectors with equation (11-17). The results of these computations are
presented in Ta ble 11-2, an d a re d irectly compa ra ble to Ta ble 11-1.
B y observa tion an d compar ison, it is clear t ha t t he consistency of Svectorsbetween t he thr ee dat a sets is fa r superior in the r esults presented in Ta ble 11-2.
This a pplies t o both the m a gnitude a nd direction of the computed ba lance sensi-
tivity vectors. Hence, the repeatability and associated linearity of the balance
sensitivity vectors, plus t he predicta ble bala nce response of t he mechanical sys-
tem was significantly improved by selecting a stable data set for computation of
the ba lance sensitivity vectors.
Table 112 Balance Sensitivity Vectors Based On Transient Data At 14,000 RPM
S VectorData Set #1
(Grams/Mil,p-p @ Deg.)Data Set #2
(Grams/Mil,p-p @ Deg.)Data Set #3
(Grams/Mil,p-p @ Deg.)
S11 24.7 @ 144 86.2 @ 188 Not Avai l able
S12 125. @ 333a
a Sha ded vectors of quest ionable a ccuracy due t o small differential vibrat ion vectors with weights .
38.2 @ 228 42.4 @ 228
S13 31.8 @ 207 20.8 @ 184 22.9 @ 176
S14 21.8 @ 322 36.1 @ 321 30.7 @ 301
S21 24.9 @ 313 21.6 @ 311 Not Avai l able
S22 17.3 @ 167 23.7 @ 175 18.9 @ 178
S23 78.7 @ 299 22.2 @ 221 27.4 @ 232
S24 27.6 @ 147 25.8 @ 166 28.3 @ 164
7/30/2019 Chapter 11 Balancing
18/102
552 Chapter-11
SINGLE PLANE BALANCE
The simplest form of mass unba lan ce consists of weight ma ldistribution in
a single plane. This ty pe of unba lance is chara cterized by a n offset of the ma sscenterline (inertia a xis) tha t is par a llel to th e geometric centerline of the rota t-
ing a ssembly. This is often ca lled a sta tic unba lance, a nd in some cases it ma y be
detected by placing a horizonta l rotor on knife edges, and a llow ing gra vity to pull
the hea vy spot down t o the bott om of the a ssembly.
A sta tic unbala nce ma y occur in a th in rotor element such as a turbine disk
or a compressor w heel. The ma ss correction for t his condition w ould proba bly be
very close to the a ctual plane of the unba lance. A stat ic unbala nce may a lso occur
in a long rotor such as a turbine or a genera tor rotor. In th is situa tion, the correc-
tion plane may, or may not, be coincident with the location of the static unbal-
a nce. In a ny ba lance problem, the follow ing basic questions must be addr essed:
r La tera l Correction P lane To Be U sed?
r Amount of the Balance Weight?r Angular Loca tion of the B a lance Weight?
The answer to the first question resides in an evaluation of the type of
unbalance, combined with the specific rotor configuration, deformed mode shape,
and accessible balance planes. The proper weight installed at the wrong plane
will not help the rotor. In all cases, the diagnostician must determine the mod-
ally effective balance planes, and then narrow the choices down to physically
accessible locations. For instance, a generator rotor may display a pure static
unba lance tha t ideally should be corrected a t midspa n. In rea lity, the pla cement
of a midspan weight in the generator rotor is not feasible, but the generator
unba lance may be corrected by w eights insta lled a t t he accessible end pla nes.
The second basic balancing question addresses the amount or size of the
ba la nce weight to be used. Idea lly, previous informa tion on the specific rotor, or asimilar unit , would be ava ilable to guide the dia gnostician. In fi eld bala ncing sit-
ua tions where historica l data is unava ilable, it is customa ry to insta ll calibrat ion
weights tha t produce centrifugal forces in t he vicinity of 5%t o 15%of the rotor
weight. Machines such as motors or expanders that rapidly accelerate up to
speed are candidates for initial weights that produce centrifugal forces in the
vicinity of 5%of the rotor weight. A more aggressive approach is often applied
towards m achines such a s steam turbines tha t m ay be start ed up slowly, and t he
unit t ripped if th e weight is incorrect. For t hese types of ma chines, the insta lla-
tion of an init ial w eight t ha t produces a centrifugal force equa l to 15% of the
rotor weight ha s proven t o be a n effective star ting point.
The third major balancing question of angular location of the weight is
often th e most diffi cult t o address. Some individuals ta ke the approach of insta ll-
ing the in it ial ba lance weight a t any angular location, and t hen computing thevector influence. It must be recognized that this is an ex t r eme ly dan ger ous
p r ac t i ce t ha t can r esu l t i n ser i ous mechan i ca l dam age. In virtual ly al l
cases, the w eight should be insta lled t o reduce the residual unba lance, a nd lower
7/30/2019 Chapter 11 Balancing
19/102
Single Plane Balance 553
the a ssociat ed vibra tion amplitudes.
The correct a ngular location of the initia l w eight is a ga in dependent upon
the t ype of unba lance, the specifi c rotor configura tion, the deformed mode sha pe,
a nd t he accessible bala nce planes. For a single plane bala nce and a simple mode
shape, the process is considerably simplified. For demonstration purposes, con-
sider Fig. 11-11 of a one ma ss rot or kit. The ma ss is su pport ed betw een bearin gs,
and proximity probes are mounted inboard of the bearings at both ends of the
rotor. Since this is only a single mass system, the dominant viable shaft mode
sha pe is a pure tra nslat iona l mode. At the critical speed of a pproxima tely 5,000
RPM the physical orientation of elements, and the maximum shaft deflection is
depicted in Fig. 11-12 of an undamped mode shape diagram.
I t is clear that the maximum deflection occurs at midspan, and that the
center mass is in a modally sensitive location. It is also apparent that the prox-
imity probe locations w ill yield informa tion tha t is r epresenta tive of the synchro-
nous 1X response. Therefore, a knowledge of the phase characteristics should
provide the information necessary for a logical angular weight placement at themidspan m ass.
One of the easiest ways to determine the proper location for a balance
w eight w a s proposed by Cha rles Ja ckson7 in his a rticle entitled Ba lance Rotors
by Orbit Ana lysis. Quoting directly from this paper, Ja ckson sta tes th a t:
Fig. 1111 Single MassRotor Kit
Fig. 1112 Mode ShapeOf Single Mass Rotor KitAt Translational First Criti-cal Speed of 5,000 RPM
225
270
315045
225 135
90
180
270
315
Coupling End
Outboard
End
CCW
Rotn
BearingJournal
7/30/2019 Chapter 11 Balancing
20/102
554 Chapter-11
th e orbit represent s a gr aphi cal pictu re of t he shaft m oti on pattern. Thekey-pha se mar k r epr esent s where th e shaft i s at th e ver y in stant th e notch passesth e pr obeBel ow th e fir st cr i ti cal, the mar k on th e orbi t r epr esent s th e locati on of
heavy spot of th e shaft r ela ti ve to th at beari ng. Th is poin t i s difficul t t o see, yetsimpl e once i t i s und er stood; i .e., the shaf t m ust be wher ever i t i s because of eit herexter nal forces or ma ss imbalan ce. Li m it in g thi s discussion t o imbal ance, theshaft is di splaced by i mbal ance. Th e mark shows where the shaft is at t hat pr ecisein stant wh en t he notch passes the probe.
Th er efore, if one woul d stop the machi ne and tu r n t he shaft u nt i l th e notchli nes up w it h t he probe, the angular posit ion of th e shaft i s sati sfied. Then, layi ngoff th e angl e fr om the pat tern t aken on th e CRT gives th e heavy spot for corr ec-ti on. Weight can eith er be subtr acted at th is point or add ed at a point 180 degreesdi ametr icall y opposite, on t he shaftTh e orbit di ameter wi l l r edu ce as corr ectionis appli ed. Should too mu ch w eight chan ge be given, the mark wi l l shi ft across th eor bit , indi catin g the weight add ed i s now t he gr eatest i mbalan ce.
Above th e fir st cri ti cal, the ru les change. Th e key-phase mar k w oul d h aveshifted approximately 180 degrees when the shaft mode of motionchan gedT herefore, th e pha se mar k w il l ap pear opposi te th e actua l h eavy spotand t he weight ad di ti on w ould be on the key-phase mar k posit ion
These statements are consistent with the previous discussion presented
earlier in this chapter. I t is appropriate to apply these techniques to the single
ma ss rotor show n in Fig. 11-11. This rotor kit w a s run a t speeds below a nd a bove
the first critical. The top portion of Fig. 11-13 displays the 1X filtered orbit and
7 Cha rles J ackson, Bala nce Rotors by Orbit Analysis , H ydr ocar bon Pr ocessin g, Vol. 50, No. 1(J an ua ry 1971).
Fig. 1113 Orbit AndTime Base Plots For AnUnbalanced Single MassRotor Kit Running At 2,620RPM Which Is Below TheCritical, And At 8,060 RPM
Which Is Above The RotorFirst Critical Speed
7/30/2019 Chapter 11 Balancing
21/102
Single Plane Balance 555
time domain plots that were extracted from the outboard X-Y probes at 2,620
RPM. This operating speed is below the 5,000 RPM balance resonance (critical
speed). The bottom set of 1X filtered orbit and time domain plots in Fig. 11-13
were obtained from the outboard X-Y probes at 8,060 RPM, which is well abovethe translational critical speed.
Both sets o f data reveal forward and reasonably circular orbits a t t he out-
boa rd end of the rotor kit. This da ta is vectorially corrected for sha ft r unout, and
the presented plots a re representa tive of the true dyn a mic motion of this single
mass rotor. Similar behavior was observed by the coupling end X-Y probes. The
coupling end da ta wa s not included, since it w ould be redundant to the outboa rd
plots. However, during an actual field balance, vibration data would always be
obta ined at both ends of the ma chine.
For purposes of completeness, both the low and high speed shaft orbits will
be eva luat ed for proper ba lan ce w eight a ngular locat ion. The diagra m shown in
Fig. 11-14 describes the low speed shaft orbit at 2,620 RPM. The vertical probe
pha se a ngle documented in Fig. 11-13 wa s 106 . Thus, moving 106 in a count er
rotation direction (i.e., clockwise) from the vertical probe locates the high spot.
This high spot is coincident wit h t he heavy spot in t his simple exam ple, and the
a ngular locat ion is identical t o the Keyphasor trigger point.
The horizonta l probe pha se an gle shown in F ig. 11-13 wa s 10 . Rota tin g 10
in a clockwise direction from the horizontal probe in Fig. 11-14 locates the same
high spot (i.e., Keypha sor tr igger). Thus, both pr obes ha ve identifi ed essentia lly
the sa me angula r location, a nd this point is th e high spot, a nd the Key trigger
point. Since this informa tion wa s obta ined below t he fir st critical speed (tra nsla-
tional resonance); the identified point would logically be coincident with the
residual hea vy spot on the disk. Thus, weight should be removed at the K eypha-
sor dot (hea vy spot) at nomina lly 3:30 oclock angu la r position. Altern a tely,
w eight could be ad ded to t he 9:30 oclock position t o correct for th e unba la nce at
t he 3:30 oclock posit ion.
In pa ssing, it should be mentioned th a t t he difference betw een th e angula rlocation identified by the vertical and horizontal phase angles is not exactly the
same. In this example, a 6 difference is noted between the two angular loca-
tions. This is q uite common behavior due t o the fa ct t ha t the orbit is not perfectly
circular. In chapter 7, it was shown that a perfectly circular orbit would appear
Fig. 1114 Shaft OrbitAnd Probe Locations ForRotor Kit Running At 2,620
RPM Which Is Below TheRotor First Critical Speed
AddWeightLocation
v=106
CCW Rotn
Remove
WeightLocation
h=10
7/30/2019 Chapter 11 Balancing
22/102
556 Chapter-11
only if the amplitudes in the orthogonal directions were equal, and the phase
va ried by 90 betw een the tw o probes. In t he example shown in F ig. 11-14, and in
most field balancing situations, the orbit is somewhat elliptical, and the mea-
sured phase a ngles differ from the pure 90 value. Hence, it ma kes sense to makea w eight correction betw een th e two positions, and a tt empt to sat isfy the vertical
a s w ell a s th e horizonta l vibrat ion response.
Above the critical speed, the phase should increase by approximately 180,
a nd th e Keyphasor dot should shift t o the other side of the orbit. In fact, this
a nticipa ted behavior wa s displayed by the bottom set of orbit a nd time ba se plots
presented on Fig. 11-13. This da ta a cquired a t 8,060 RP M, which is considera bly
above the 5,000 RPM critical speed. Extracting the orbit from the high speed
data set at the bottom of Fig. 11-13, and including the measured phase angles,
the dia gra m in F ig. 11-15 wa s generat ed.
The high speed vertical probe phase angle was 274. Moving 274 in acount er rota tion dir ection (i.e., clockw ise) from t he vert ical probe locat es th e high
spot (coincident w ith the Key trigger). Similar ly, the h orizontal probe phase
angle shown in Fig. 11-13 was 169. Moving 169 in a clockwise direction from
the horizontal probe locates basically the same high spot. Thus, both probes have
identified essentially the same angular location above the resonance. Since this
information was obtained above the first critical speed, the identified point
would be opposite to the residual heavy spot. Thus, weight should be added at
th e Keypha sor dot a round t he 9 oclock position. Altern a tely, w eight could be
subt ra cted a t t he 3 oclock position.
In retrospect, the data above the critical speed (Fig. 11-14) is identifying
the same general angular location as the data obtained below the critical (Fig.
11-13). The high speed orbit indicat es a hea vy s pot a t 3 oclock, and th e low speed
orbit r evea ls a heavy spot tha t is somew ha t lower a t 3:30 oclock. The tw o valueswould be identical if both orbits were perfectly round (circular), and a precise
180 phase cha nge occurred through t he critica l speed ra nge. However, these tw o
ideal conditions seldom occur on rea l ma chines, and the discussed da ta is repre-
senta tive of typica l ma chinery beha vior.
Fig. 1115 Shaft OrbitAnd Probe Locations ForRotor Kit Running At 8,060RPM Which Is Above TheRotor First Critical Speed
AddWeightLocation
RemoveWeight
Location
CCW Rotn
h=169
v=274
7/30/2019 Chapter 11 Balancing
23/102
Single Plane Balance 557
In ma ny respects, field ba lancing consists of a series of compromises. In t his
case, the average (low to high speed) weight removal should be in the vicinity of
100 clockwise from the vertical probe. However, the available balance holes in
this portion of the disk were empty, and there was no opportunity to easilyremove additional weight. The next compromise would be to add weight at the
light spot a t a pproxima tely 280 (i .e., 100 plus 180 ). I t w a s noted tha t w eights
a lready fi lled the bala nce hole at 270 , a nd the only rema ining empty hole wa s at
292. A total of 0.5 Grams was installed at this 292 hole, and the resultant
response due to this single plane weight addition is presented in Fig. 11-16. As
before, the top set of orbit and time base plots at 2,620 RPM depict the shaft
vibration below the critical speed. The bottom set of plots in Fig. 11-16 were
a cquired at 8,060 RP M, which is a bove the rotor ba lance resona nce frequency.
I t is clear tha t t he 0.5 Gra m w eight a t 292 signifi cantly reduced the syn-
chronous 1X unbalance response. It should also be clear that the position of the
Keypha sor dot on the orbit is representa tive of the high spot. This concept is
fundamental to balancing, as well as the analysis and understanding of the
behavior of any rotating system.
These concepts might seem to be somewhat different from the automated
instrum enta tion insta lled on most low speed shop bala ncing machines. In actua l-
ity, the concept is the same, but there other significant differences. For instance,
during most shop balancing work, it is inexpensive to make a run, and there is
little physical risk to th e ma chinery or th e opera tor. In t he case of field bala nc-ing, it is often diffi cult to change w eights, a nd it is generally expensive to ma ke a
full speed run. Furt hermore, if an incorrect w eight is used in a fi eld bala nce, the
results ma y be ha zar dous to the ma chinery, and t he health of the operat or.
Ea ch field ba lance shot should be a m eaningful move, and it should contr ib-
Fig. 1116 Orbit AndTime Base Plots For ABalanced Single MassRotor Kit Running At 2,620RPM Which Is Below The
Critical, And At 8,060 RPMWhich Is Above The RotorFirst Critical Speed
7/30/2019 Chapter 11 Balancing
24/102
558 Chapter-11
ute to the overa ll dat a base describing the behavior of the ma chine. Field balan c-
ing generally requires the quantification of the basic relationship between the
shaft response and the applied force as commonly expressed by:
This general expression has been stated several times in this text due to
the fact t ha t it ha s ma ny specifi c applica tions in rotor dyna mics. Within th e bal-
ancing discipline, response is the measured shaft or casing vibration vector. The
applied force is represented by the unbalance vector, and the restraint may be
thought of as a stiffness vector. In balancing applications, this variable may be
considered as a spring-type parameter of a specific unbalance producing a spe-
cific deflection or rotor vibration. Another way to view this restraint term is to
consider it a s th e sensitivity of the ma chine to rotor unbala nce. If these bala nc-
ing terms are substituted for the equivalent values in the previous expression,
the following equation (11-1) evolves:
(11-1)
All var iables in (11-1) a re vector q ua ntit ies. Ea ch para meter car ries both a
ma gnitude a nd a direction. If the initia l rotor vibra tion is described by the A vec-tor wit h a mplitude in Mils,p-p, and t he unbalance is defined by the Uvector w ith
units of Grams, then the balance sensitivity Svector must car ry units o f Gra msper Mil,p-p. Using these designat ions, equa tion (11-1) ma y be rew ritt en a s:
(11-2)
where: = Initial Vibration Vector (Mils,p-p at Degrees)
= Mass Unbalance Vector (Grams at Degrees)
= Sensitivity Vector to Unbalance (Grams/Mil,p-p at Degrees)
This expression ma y be easily remembered a s the equa tion. In
either format, the vibration vector may be measured directly, and the technical
problem resolves to one of determining the mass unbalance vector based upon
some unknown sensitivity. This sensitivity vector may be experimentally deter-
mined by a dding a known cal ibrat ion w eight a t a known angular location to the
rotor, and measur ing th e vibrat ion response vector. Assume tha t the calibra tion
weight vector is defined by W, and the resulta nt ro tor vibrat ion is identified asthe Bvector. If t he ma chine is re-run a t the sa me speed a nd opera ting condition,and if the system exhibits linear behavior, then equation (11-2) may be expanded
int o the follow ing expression:
ResponseFo rce
Res t r a i n t ----------------------------=
V i b r a t i o n Un b a l a n c e Sens i t i v i t y --------------------------------=
AU
S-----=
A
U
S
U S A=
7/30/2019 Chapter 11 Balancing
25/102
Single Plane Balance 559
(11-3)
where: = Vibration Vector with Calibration Weight (Mils,p-p at Degrees)
= Calibration Weight Vector (Grams at Degrees)
Expa nsion of equa tion (11-3), a nd s ubst itut ing (11-2) yields t he follow ing:
From t his expression, the ba lan ce sensitivity vector ma y be computed a s:
(11-4)
The unbalance may now be determined from equation (11-2). It should be
noted tha t t he measured vibrat ion vector must represent a ctual dyna mic motion
of the r otor. Hence, the vector must be corrected for a ny electr ical a nd/or
mechanical runout. This is achieved by vector subtraction of the slow roll from
the vibration vector measured at balancing speed. The following equation (11-5)
is a pplica ble for all mea surements t ha t r equire a slow roll or run out correction or
compensation (e.g., proximity probes). Note that other transducers (e.g., casinga ccelerometer s) do not req uire t his t ype of vector correction.
(11-5)
where: = Runout Compensated Initial Vibration Vector (Mils,p-p at Degrees)
= Slow Roll Runout Vector (Mils,p-p at Degrees)
Thus, the proper expression for calculation of the mass unbalance is now
eas ily d erived from equa tions (11-2) a nd (11-5) a s follow s:
(11-6)
As previously noted, the vibration vector amplitudes are measured in
Mils,p-p, the weight units may be expressed in Grams or Gram-Inches, and the
bala nce sensitivity vectors w ould car ry the un its of Mils/G ra m or Mils/G ra m-
Inch respectively. In all cases, the angular orientation is against rotation (i.e. ,
BU W+
S-----------------=
B
W
BU W+
S-----------------
U
S-----
W
S-----+ A
W
S-----+= = =
or
B AW
S
-----=
SW
B A---------------
=
A c A E=
A c
E
U S A c=
7/30/2019 Chapter 11 Balancing
26/102
560 Chapter-11
phase lag), from each respective vibration transducer. In addition, the trigger
point is esta blished by the coincidence of th e physical sha ft t rigger locat ion, a nd
the center of the Keyphasor timing probe.
It should be mentioned that the plane of unbalance, the correction plane,and the measurement plane are not defined as coincidental. They may be, and
usua lly ar e, sepa ra te planes in a ma chine assembly. I t is import a nt t o recognize
that the previous equations are directed towards achieving a minimum value of
the vibra tion vector. Tha t is, the calcula tions w ill yield a bala nce weight, located
at the correction plane, that is sized to minimize the vibration response at the
measur ement pla ne to the a ctual ma ss unbala nce distributed in the rotor. In the
majority of cases, this is both acceptable and agreeable. However, it is always
good practice to consider the shaft mode shape, and verify that the correction
weight does not aggravate deflections at other points along the rotor, while
reducing vibra tion at t he measurement plane.
This same equation array is applicable to calculations performed both
a bove an d below a critica l speed. In a ll cases, the bala nce computa tion solves for
a zero response amplitude. A similar set of expressions may be developed for
multiple measurement and correction planes. I t should be restated that the
equat ion set used for t he calcula tions presumes a linear response of the mecha n-
ica l system to ma ss unba lan ce. The presence of significa nt sha ft preloa ds (due to
misalignment, gear contact forces, etc.), thermal effects, fluidic forces, bearing
instabilities, and various other mechanisms may render these calculations inef-
fective. How ever, for m a ny conditions of rota tional m a ss unba lance, the mecha n-
ica l system will beha ve in a r easonably linear fa shion.
In many instances, a single plane calculation is not totally adequate, and
cross-coupling betw een tw o or m ore correction pla nes m ust be considered. This is
achieved by expansion of the previously discussed equation set to multiple
planes. However, before addressing any additional complexity of the equation
structure, it would be advisable to examine the field application of these singleplane calculations to t he follow ing case history of a forced dra ft.
Case History 37: Forced Draft Fan Field Balance
A direct application of single plane balancing occurs on simple rotor sys-
tems t ha t conta in essentially one plane of unbala nce. For exa mple, consider th e
forced draft fan rotor described in Fig. 11-17. This is a fully symmetrical rotor
th a t is nomina lly 177 inches long, a nd w eights a pproxima tely 7,100 pounds. This
forced draft fan is driven by a steam turbine through a speed decreasing gear
box. Normal speed varies between 1,470 and 1,540 RPM. Unfortunately, the fan
tra nslat iona l resona nce (critica l speed) exists a t 1,500 RP M, and the resonance
ban dwidt h is a pproxima tely 400 RPM. Thus, the fi rst critica l resona nce persists
bet w een speeds of 1,300 RP M [= 1,500-(400/2)] a nd 1,700 RP M [= 1,500+ (400/2)].I t is apparent t hat under normal operat ing condit ions, the fan runs w ithin the
bandw idth of the first crit ical .
The situation is further complicated by the fact that the machine is
insta lled in a n undesirable environment tha t a llows ingestion of coke, plus other
7/30/2019 Chapter 11 Balancing
27/102
Single Plane Balance 561
foreign objects into the fan. Hence, the fan blades are always under attack, and
mechanical damage to the blades results in changes to the balance characteris-tics at the middle of the rotor. Since the fan runs w ithin th e tra nslat iona l critical
speed domain, and since balance changes due to physical damage continually
occur at the midspan , this unit is quit e susceptible to rapid cha nges in vibrat ion.
When these undesirable events occur, the only reasonable solution is to correct
the change in mass unbalance by field balancing.
The fan is equipped wit h X-Y proximity probes a t each bearing a s shown in
Fig. 11-17. The probes ar e insta lled a t 45 from true vertical, a nd a Keypha sor
is mounted a t t he outboard st ub end of the fan sha ft. I t should be mentioned tha t
the bear ings a re supported on t a ll pedesta ls a tt a ched to a fl exible ba seplat e. The
entir e support st ructu re is quit e soft, a nd considera ble ca sing motion occurs. To
include this informa tion into the ba lance calcula tions, a casing vibra tion probe is
insta lled on ea ch fan bearing housing. These ca sing probes a re mounted in line
with the X-Axis shaft sensing proximity probes. This orientation allows the sum-
ma tion (electronic or by calcula tion) of the relative sha ft signa l wit h t he absolute
casing vibration signal to obtain absolute shaft vibration.
The fan in question experienced substantial damage during one particu-
lar ly violent ingestion of a lar ge icicle. Two bla des w ere dam a ged, and one bea r-
ing had a babbitt breakdown. These mechanical problems were corrected, and
the unit w a s resta rt ed. U ndersta nda bly, the blade repairs w ere responsible for a
major mass unbalance condit ion , and the startup was terminated at 900 RPM
w ith sha ft vibra tion am plitudes in excess of 7.0 Mils,p-p.
B a sed on previous experience, a n 1,190 gra m (42 ounces) correction w eight
was welded to the center plate at an angle of 28. The machine was restarted,
a nd t he correction proved to be effective. This t ime a desira ble bala ncing speed of
1,650 RPM was achieved. It is usually unwise to try and acquire balanceresponse vibrat ion da ta close to a critica l speed. This is due to the fa ct th a t sma ll
changes in speed will result in significant changes in the 1X vectors. Hence,
w hen a ma chine runs in t he vicinity of a resonance, it is usua lly good pra ctice to
tr y a nd obta in the bala nce da ta in the pla tea u region above the resona nce.
Fig. 1117 Rotor Configuration For Steam Boiler Forced Draft Fan
Journal15" Long
6"
3/4" Thick Center Plate58 " Outer Diameter
8.5" 15"
Journal15" Long
6"
Balance Plane
Total Weight = 7,100 Pounds Overall Length = 177 Inches
Y X45 45
Y X45 45
7/30/2019 Chapter 11 Balancing
28/102
562 Chapter-11
In t h is case , the maximum a tta inable fan speed wa s 1,650 RP M, and t his
speed was used for the remaining balance runs. Response data at both bearings
was similar, and for purposes of brevity, only the outboard bearing will be dis-
cussed. In t his case, the runout compensat ed X-Y proximity probe data , and thehorizontal casing motion will be used for the balancing calculations. The Y-Axis
proximity probe wa s used a s th e zero degree reference for all of the w eights. The
initial vibra tion response vectors a t t he outboard bearing a t 1,650 RP M a re sum-
ma rized in t he middle column of Ta ble 11-3. The a ddit ion of a 567 gra m ca libra -
tion weight at the fan center plate at an angle of 40 produced the vibration
vectors in t he righ t ha nd column of Ta ble 11-3.
Unfortunately, vibration amplitudes have increased at all locations, and it
is clear tha t t he cal ibrat ion w eight wa s placed at the wrong angle. I t wa s mistak-
enly assumed tha t t he ca librat ion weight should go in the sam e angula r location
a s the 1,190 gra m correction w eight tha t w a s a dded to allow full speed operat ion.
In actuality, the 567 gram calibration weight should have been placed in the
vicinity of 320 instead of the 40 position. The measured amplitudes were high,
but t hey w ere within the t olerable ra nge for a short dura tion run. A complete set
of informa tion is now a va ilable to perform a single plane ba lan ce ca lculat ion. The
first step is to determine the balance sensitivity vectors from equation (11-4).The calcula tions for th e Y-Axis sha ft proximit y probe ar e shown a s follows:
This va lue for t he bala nce sensitivity vector ma y now be combined wit h t he
initial vibrat ion vector to determine t he ma ss unba lance using equa tion (11-6):
The vector multiplication was performed in accordance with the rulesestablished by equation (2-39). Performing the same calculations for the X-Axis
sha ft probe a nd t he casing velocity sens or yields Ta ble 11-4. This t a ble summa -
rizes the ca lculat ed mass un bala nce for th is fan a s a function of ea ch of the indi-
vidual vibra tion measurement probes.
Table 113 Forced Draft Fan - Initial Plus Calibration Weight Vibration Vectors
Measurement LocationInitial Vibration
(A Vector)Vibration With CalibrationWeight Installed (B Vector)
Outboa rd S ha ft Y-Axis 5.60 Mils,p-p @ 322 7.54 Mils,p-p @ 226
Outboa rd S ha ft X-Axis 6.08 Mils,p-p @ 163 9.82 Mils,p-p @ 81
Outboa rd C a sing X-Axis 3.85 Mils,p-p @ 144 5.79 Mils,p-p @ 48
SW
B A---------------
567 Grams 40
7.54 Mils 226 5.60 Mils 322-----------------------------------------------------------------------------------
567 Grams 40
9.85 Mils 192--------------------------------------
= = =
S 57.56 Grams/Mil,p-p 208=
U S A c 57.56 Grams/Mil,p-p 208{ } 5.60 Mil,p-p 322{ } 322 Grams 170= = =
7/30/2019 Chapter 11 Balancing
29/102
Single Plane Balance 563
The center column of Ta ble 11-4 identifi es th e ma gnit ude of the un ba la nce
in grams, plus the location of the unbalance in degrees. If this rotor was to be
bala nced by w eight remova l, then approxima tely 320 grams w ould be removed at
nominally 170 counter rotation from the vertical probe. On the other hand, if
balancing will be accomplished by weight addition, then the angular location
must be modified by 180 to determine the weight add vectors as shown in the
right ha nd column of Ta ble 11-4. Thus, a