Embed Size (px)
Citation preview

Copyright © 2010 Pearson Education, Inc.
Chapter 10
Rotational Kinematics and Energy

Copyright © 2010 Pearson Education, Inc.
10-1 Angular Position, Velocity, and Acceleration

Copyright © 2010 Pearson Education, Inc.
10-1 Angular Position, Velocity, and Acceleration
Degrees and revolutions:

Copyright © 2010 Pearson Education, Inc.
10-1 Angular Position, Velocity, and Acceleration
Arc length s, measured in radians:

Copyright © 2010 Pearson Education, Inc.
10-1 Angular Position, Velocity, and Acceleration

Copyright © 2010 Pearson Education, Inc.
10-1 Angular Position, Velocity, and Acceleration

Copyright © 2010 Pearson Education, Inc.
10-1 Angular Position, Velocity, and Acceleration

Copyright © 2010 Pearson Education, Inc.
10-1 Angular Position, Velocity, and Acceleration

Copyright © 2010 Pearson Education, Inc.
10-2 Rotational Kinematics
If the angular acceleration is constant:

Copyright © 2010 Pearson Education, Inc.
10-2 Rotational Kinematics
Analogies between linear and rotational kinematics:

Copyright © 2010 Pearson Education, Inc.
Example: A high speed dental drill is rotating at 3.14×104 rads/sec. Through how many degrees does the drill rotate in 1.00 sec?
Given: ω = 3.14×104 rads/sec; Δt = 1 sec; α = 0
Want Δθ.
( )( )degrees 101.80rads1014.3
sec 0.1rads/sec1014.3
21
64
40
00
200
×=×=
×=Δ=Δ
Δ+=
Δ+Δ+=
tt
tt
ωθ
ωθθ
αωθθ

Copyright © 2010 Pearson Education, Inc.
10-3 Connections Between Linear and Rotational Quantities

Copyright © 2010 Pearson Education, Inc.
10-3 Connections Between Linear and Rotational Quantities

Copyright © 2010 Pearson Education, Inc.
10-3 Connections Between Linear and Rotational Quantities

Copyright © 2010 Pearson Education, Inc.
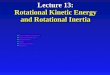
10-3 Connections Between Linear and Rotational Quantities
This merry-go-round has both tangential and centripetal acceleration.

Copyright © 2010 Pearson Education, Inc.
10-4 Rolling Motion If a round object rolls without slipping, there is a fixed relationship between the translational and rotational speeds:

Copyright © 2010 Pearson Education, Inc.
10-4 Rolling Motion We may also consider rolling motion to be a combination of pure rotational and pure translational motion:

Copyright © 2010 Pearson Education, Inc.
10-5 Rotational Kinetic Energy and the Moment of Inertia
For this mass,

Copyright © 2010 Pearson Education, Inc.
10-5 Rotational Kinetic Energy and the Moment of Inertia
We can also write the kinetic energy as
Where I, the moment of inertia, is given by

Copyright © 2010 Pearson Education, Inc.
Example: (a) Find the moment of inertia of the system below. The masses are m1 and m2 and they are separated by a distance r. Assume the rod connecting the masses is massless.
ω
r1 r2 m1 m2
r1 and r2 are the distances between mass 1 and the rotation axis and mass 2 and the rotation axis (the dashed, vertical line) respectively.

Copyright © 2010 Pearson Education, Inc.
(b) What is the moment of inertia if the axis is moved so that is passes through m1?
Example continued:
( )( ) ( )( )2
22
222
211
2
1
2
m kg 00.1m 00.1kg 00.1m 00.0kg 00.2
=
+=
+==∑=
rmrmrmIi
ii
Take m1 = 2.00 kg, m2 = 1.00 kg, r1= 0.33 m , and r2 = 0.67 m.
( )( ) ( )( )2
22
222
211
2
1
2
m kg 67.0m 67.0kg 00.1m 33.0kg 00.2
=
+=
+==∑=
rmrmrmIi
ii

Copyright © 2010 Pearson Education, Inc.
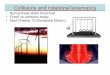
10-5 Rotational Kinetic Energy and the Moment of Inertia
Moments of inertia of various regular objects can be calculated:

Copyright © 2010 Pearson Education, Inc.
Example: What is the rotational inertia of a solid iron disk of mass 49.0 kg with a thickness of 5.00 cm and a radius of 20.0 cm, about an axis through its center and perpendicular to it?
From the previous slide:
( )( ) 222 m kg 98.0m 2.0kg 0.4921
21
=== MRI

Copyright © 2010 Pearson Education, Inc.
10-6 Conservation of Energy The total kinetic energy of a rolling object is the sum of its linear and rotational kinetic energies:
The second equation makes it clear that the kinetic energy of a rolling object is a multiple of the kinetic energy of translation.

Copyright © 2010 Pearson Education, Inc.
10-6 Conservation of Energy If these two objects, of the same mass and radius, are released simultaneously, the disk will reach the bottom first – more of its gravitational potential energy becomes translational kinetic energy, and less rotational.

Copyright © 2010 Pearson Education, Inc.
Example: Two objects (a solid disk and a solid sphere) are rolling down a ramp. Both objects start from rest and from the same height. Which object reaches the bottom of the ramp first?
h
θ
The object with the largest linear velocity (v) at the bottom of the ramp will win the race.

Copyright © 2010 Pearson Education, Inc.
!"
#$%
& +=
!"
#$%
& +=
!"
#$%
&+=++=+
+=+
=
2
22
2222
2
21
21
21
21
2100
RIm
mghv
vRImmgh
RvImvImvmgh
KUKUEE
ffii
fi
ω
Apply conservation of mechanical energy:
Example continued:
Solving for v:

Copyright © 2010 Pearson Education, Inc.
2sphere
2disk
5221
mRI
mRI
=
=
For the disk:
For the sphere:
ghv34
disk =
ghv710
sphere =
Since Vsphere> Vdisk the sphere wins the race.
ghv 2box =Compare these to a box sliding down the ramp.
Example continued:
The moments of inertia are:

Copyright © 2010 Pearson Education, Inc.
Summary of Chapter 10
• Period:
• Counterclockwise rotations are positive, clockwise negative
• Linear and angular quantities:

Copyright © 2010 Pearson Education, Inc.
Summary of Chapter 10
• Linear and angular equations of motion:
Tangential speed:
Centripetal acceleration:
Tangential acceleration:

Copyright © 2010 Pearson Education, Inc.
Summary of Chapter 10
• Rolling motion:
• Kinetic energy of rotation:
• Moment of inertia:
• Kinetic energy of an object rolling without slipping:
• When solving problems involving conservation of energy, both the rotational and linear kinetic energy must be taken into account.