Embed Size (px)
DESCRIPTION
Chapter 1. Matrices and Systems of Equations. Systems of Linear Equations. Where the a ij ’ s and b i ’ s are all real numbers, x i ’s are variables . We will refer to systems of the form (1) as m×n linear systems. Definition Inconsistent : A linear system has no solution. - PowerPoint PPT Presentation
Citation preview
Chapter 1
Matrices and Systems of Equations
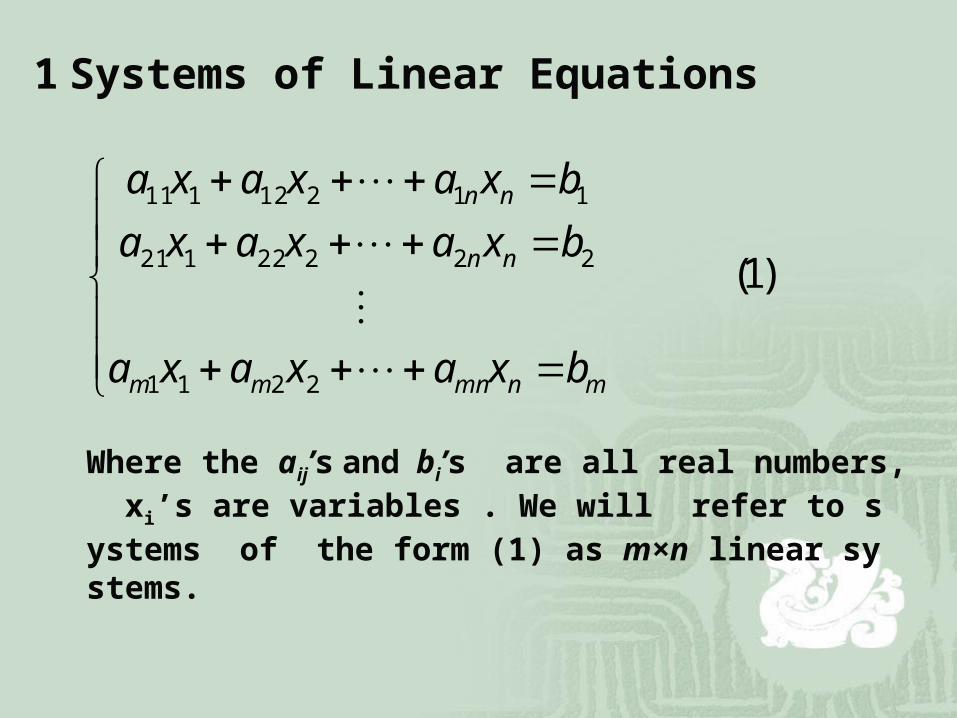
1 Systems of Linear Equations
)1(
2211
22222121
11212111
mnmnmm
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
Where the aij’s and bi’s are all real numbers, xi’s are variables . We will refer to systems of the form (1) as m×n linear systems.
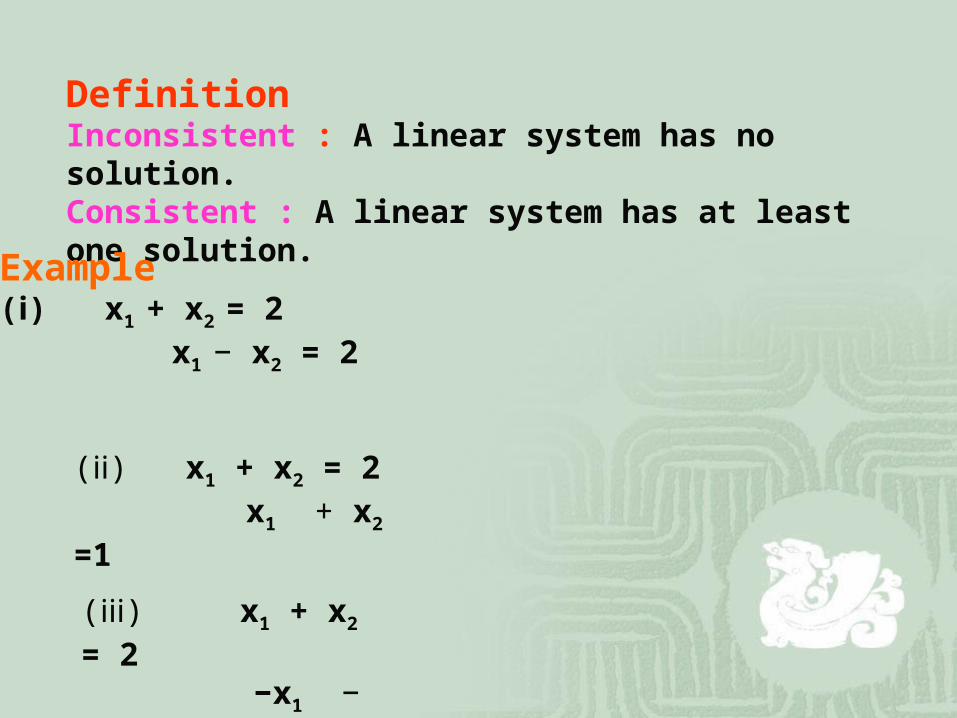
Definition Inconsistent : A linear system has no solution.Consistent : A linear system has at least one solution.
Example( ) xⅰ 1 + x2 = 2 x1 − x2 = 2
( ) ⅱ x1 + x2 = 2 x1 + x2 =1
( ) ⅲ x1 + x2 = 2 −x1 − x2 =-2
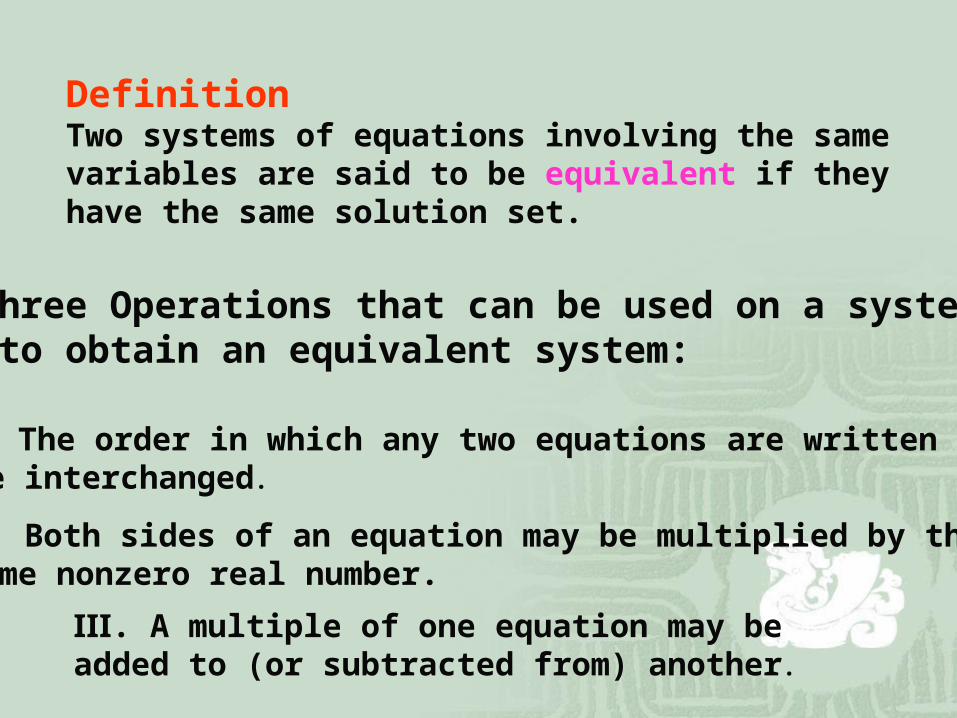
Definition Two systems of equations involving the same variables are said to be equivalent if they have the same solution set.
Three Operations that can be used on a system to obtain an equivalent system:
Ⅰ. The order in which any two equations are written may be interchanged.
Ⅱ. Both sides of an equation may be multiplied by the same nonzero real number.
Ⅲ. A multiple of one equation may be added to (or subtracted from) another.
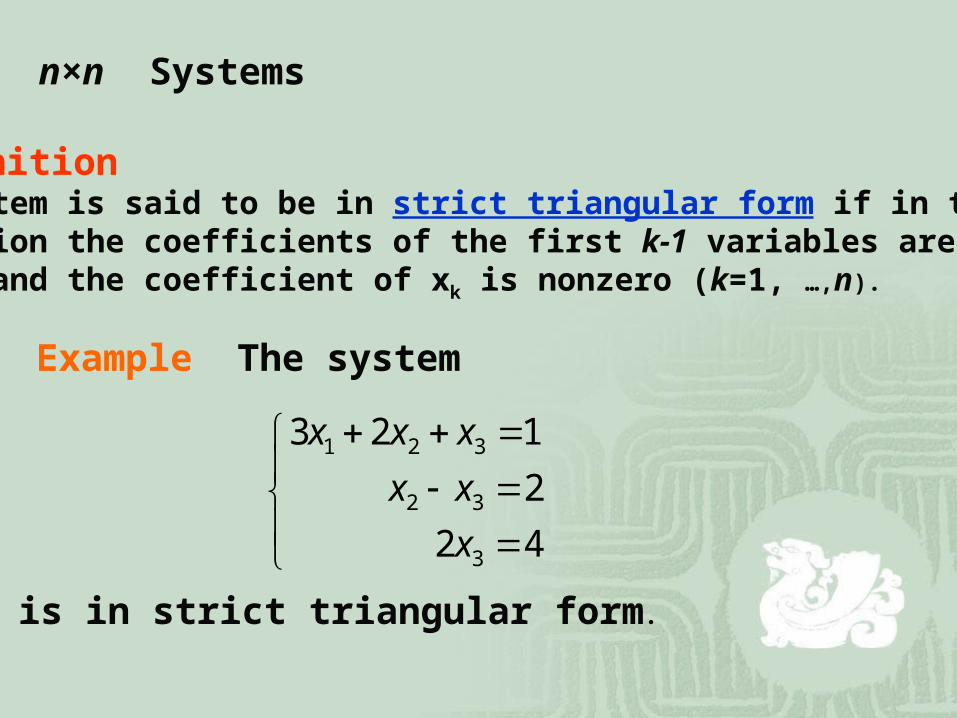
n×n Systems
Definition
A system is said to be in strict triangular form if in the kthequation the coefficients of the first k-1 variables are all zero and the coefficient of xk is nonzero (k=1, …,n).
42
2
123
3
32
321
x
xx
xxx
is in strict triangular form.
Example The system
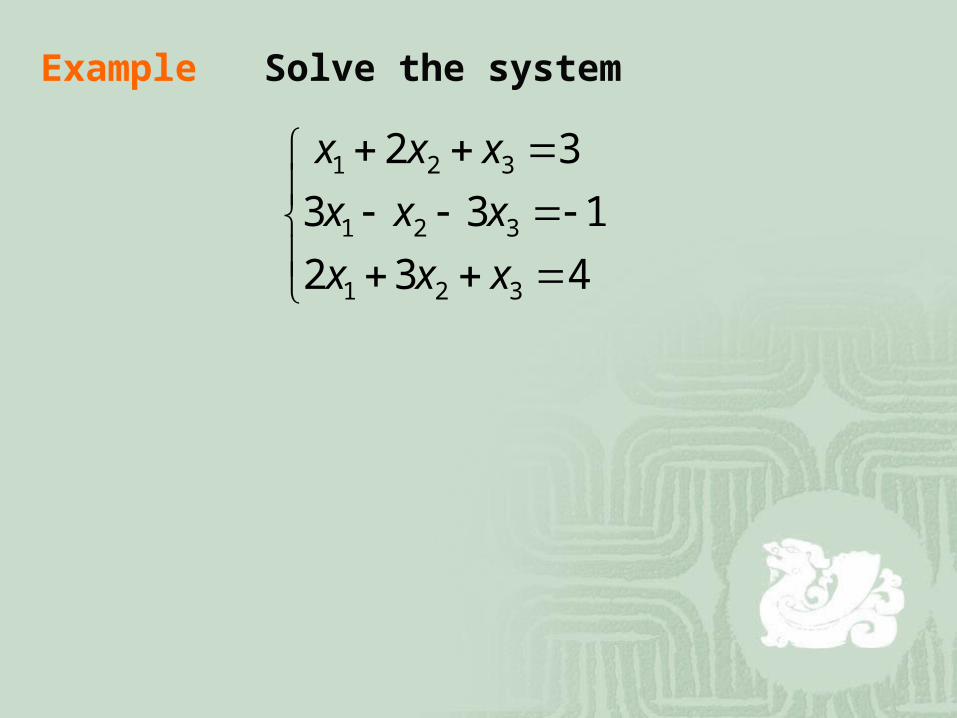
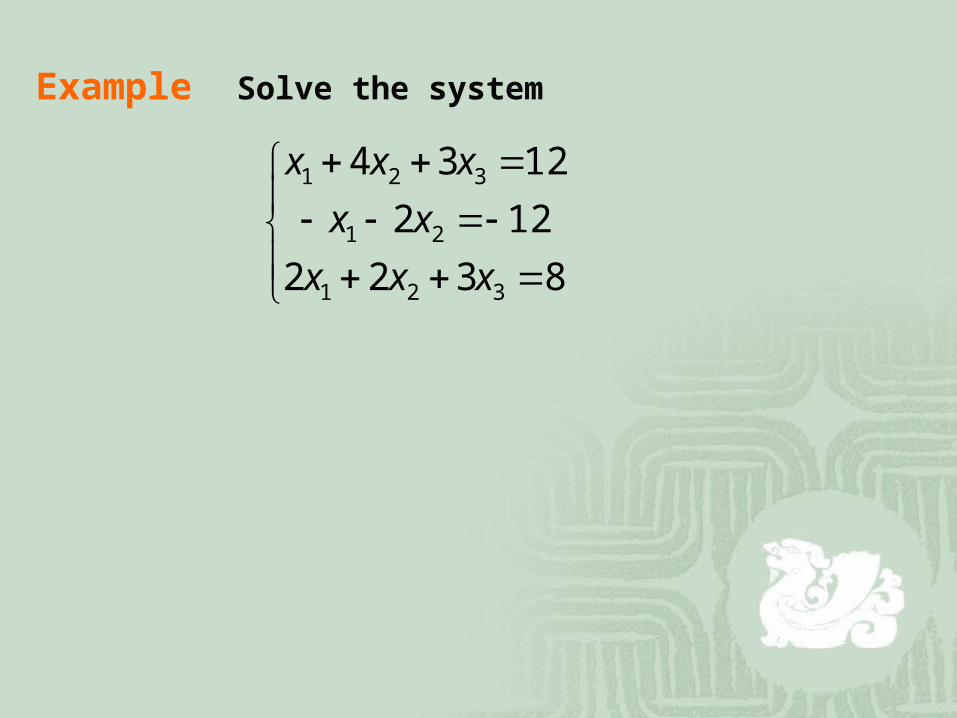
Example Solve the system
1
432
33
32
321
321
321
xxx
xxx
xxx
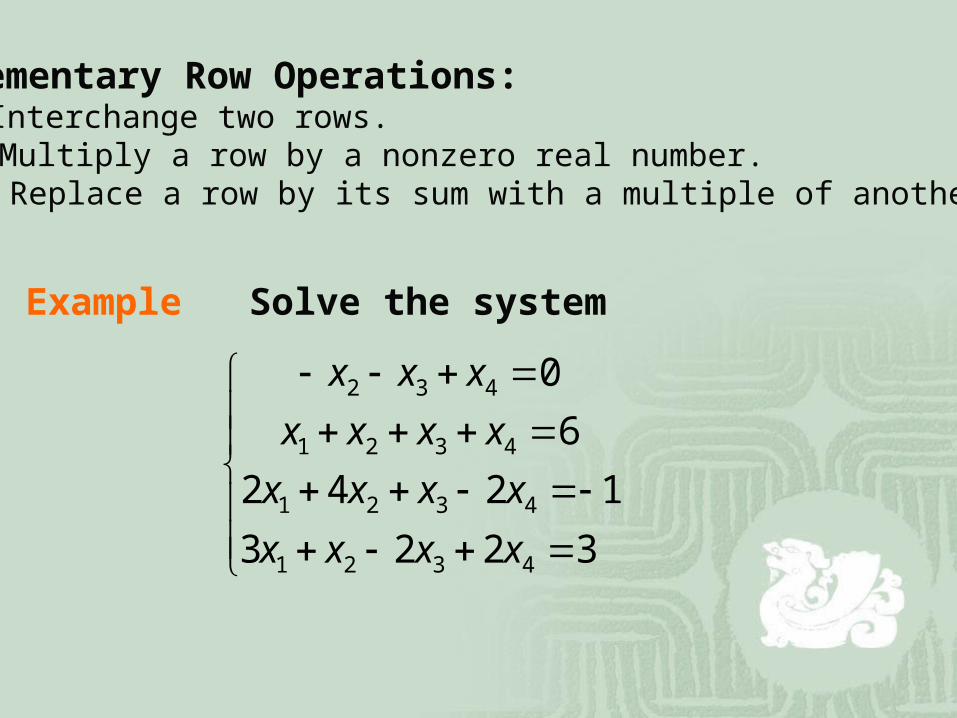
Elementary Row Operations:Ⅰ. Interchange two rows.Ⅱ. Multiply a row by a nonzero real number.Ⅲ. Replace a row by its sum with a multiple of another row.
Example Solve the system
3223
1242
6
0
4321
4321
4321
432
xxxx
xxxx
xxxx
xxx
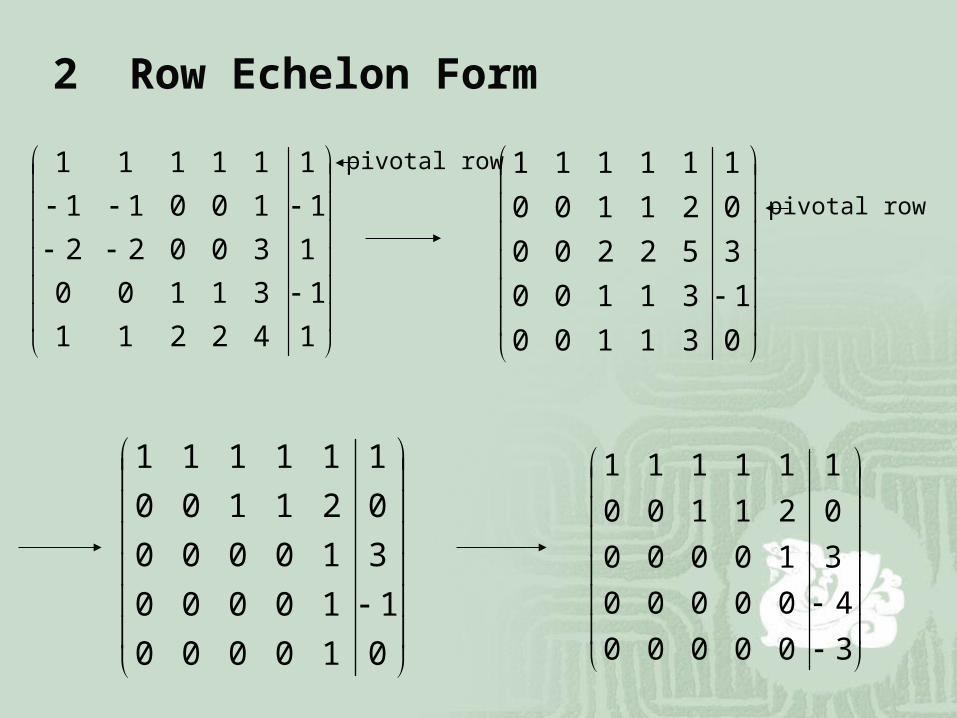
2 Row Echelon Form
1
1
1
1
1
42211
31100
30022
10011
11111
0
1
3
0
1
31100
31100
52200
21100
11111
0
1
3
0
1
10000
10000
10000
21100
11111
3
4
3
0
1
00000
00000
10000
21100
11111
pivotal row
pivotal row
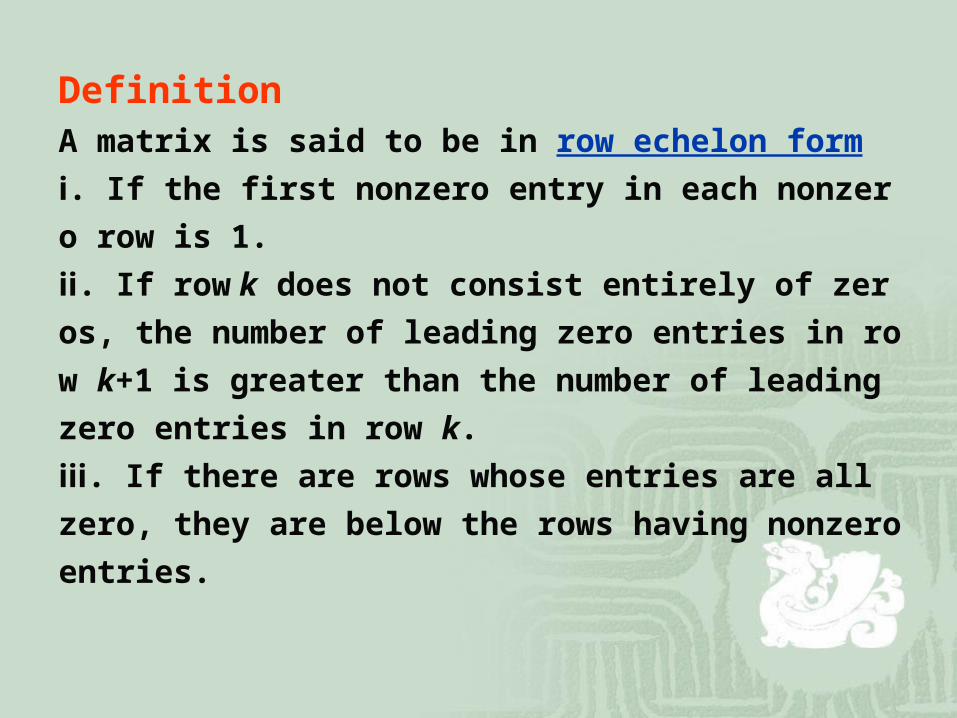
Definition
A matrix is said to be in row echelon form
ⅰ. If the first nonzero entry in each nonzero row is 1.
ⅱ. If row k does not consist entirely of zeros, the numb
er of leading zero entries in row k+1 is greater than the
number of leading zero entries in row k.
ⅲ. If there are rows whose entries are all zero, they are
below the rows having nonzero entries.
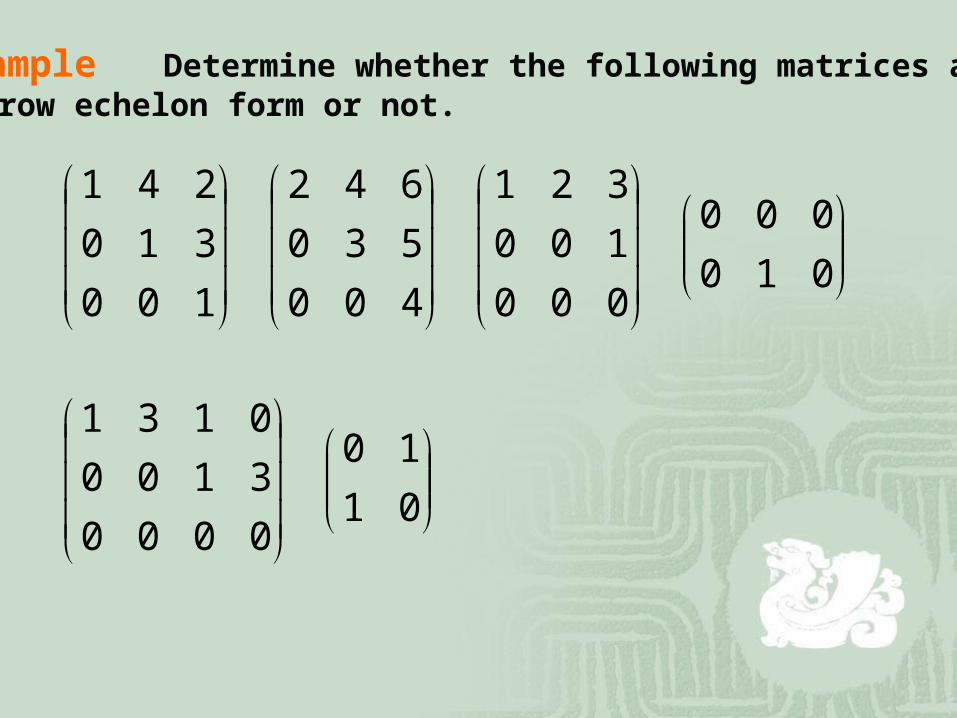
Example Determine whether the following matrices arein row echelon form or not.
010
000
000
100
321
400
530
642
100
310
241
01
10
0000
3100
0131
Definition
The process of using operations , , Ⅰ Ⅱ Ⅲ to transform a l
inear system into one whose augmented matrix is in ro
w echelon form is called Gaussian elimination.
Definition
A linear system is said to be overdetermined if there ar
e more equations than unknows.
A system of m linear equations in n unknows is said to
be underdetermined if there are fewer equations than u
nknows (m<n).
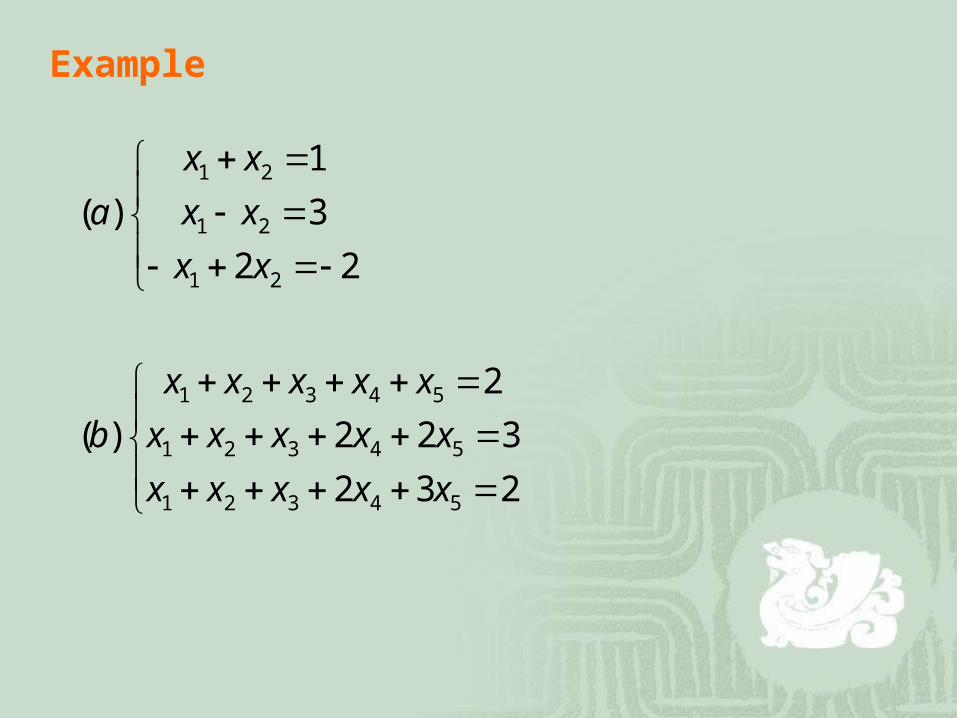
Example
232
322
2
)(
22
3
1
)(
54321
54321
54321
21
21
21
xxxxx
xxxxx
xxxxx
b
xx
xx
xx
a
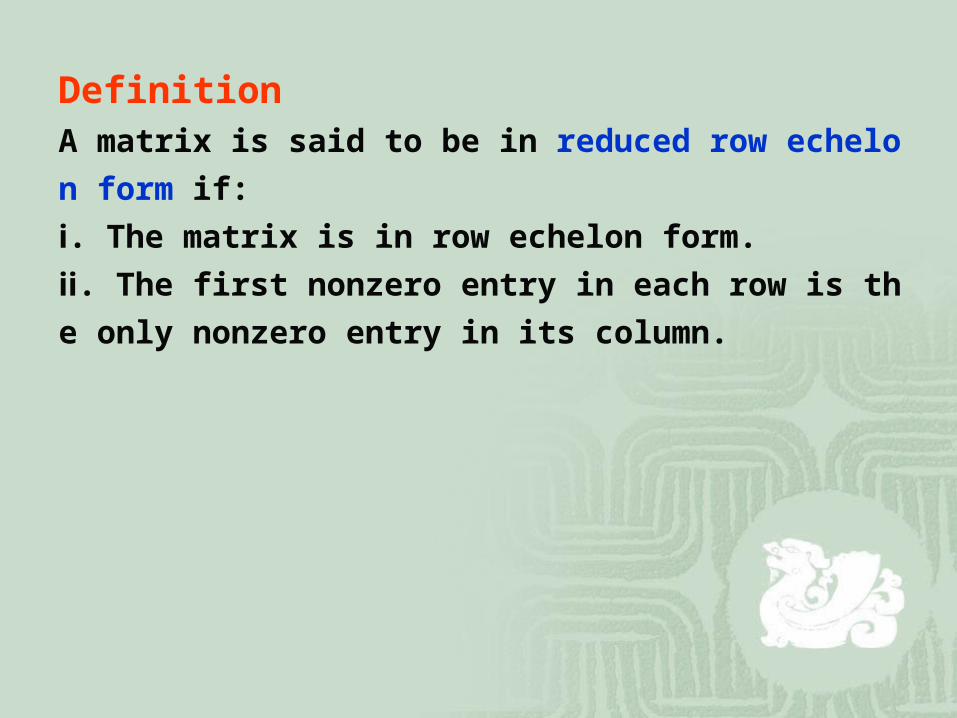
Definition
A matrix is said to be in reduced row echelon form if:
ⅰ. The matrix is in row echelon form.
ⅱ. The first nonzero entry in each row is the only nonz
ero entry in its column.
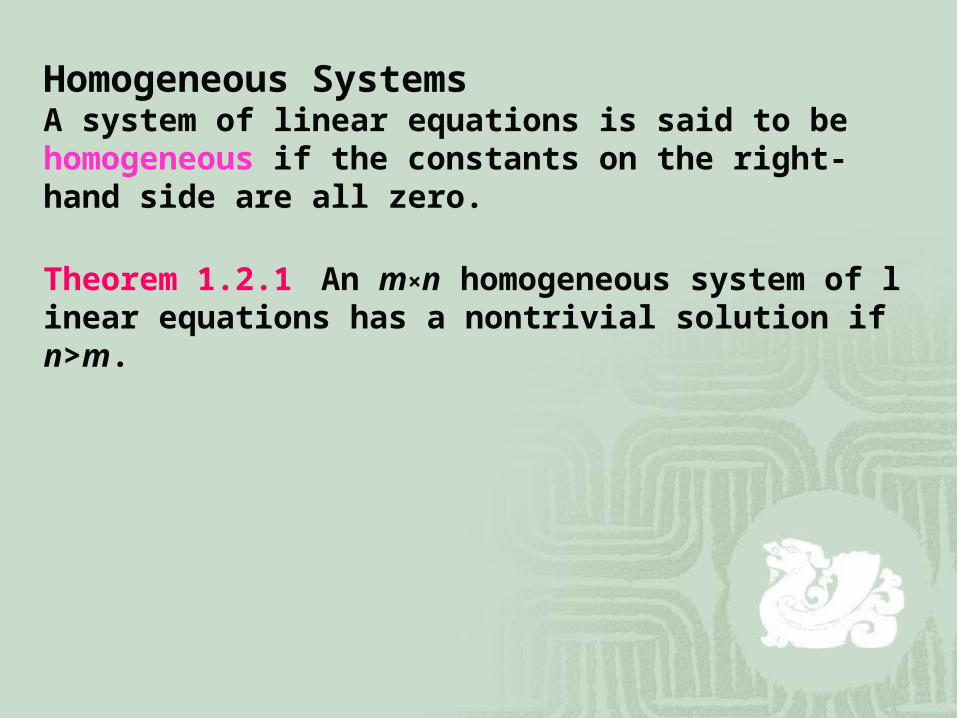
Homogeneous SystemsA system of linear equations is said to be homogeneous if the constants on the right-hand side are all zero.
Theorem 1.2.1 An m×n homogeneous system of linear equations has a nontrivial solution if n>m.
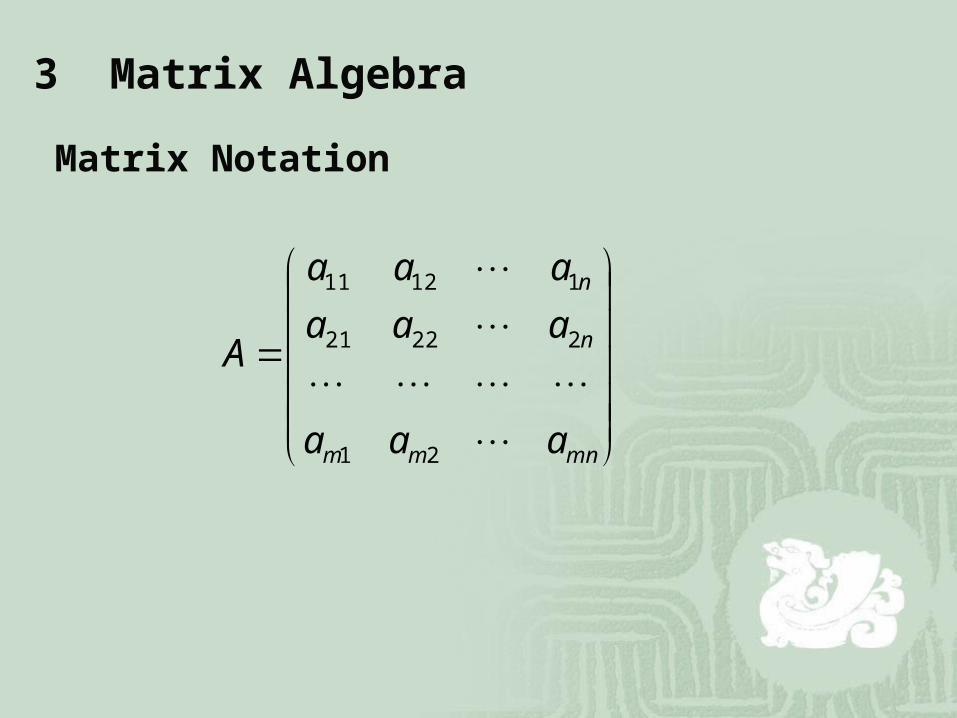
3 Matrix Algebra
Matrix Notation
mnmm
n
n
aaa
aaa
aaa
A
21
22221
11211
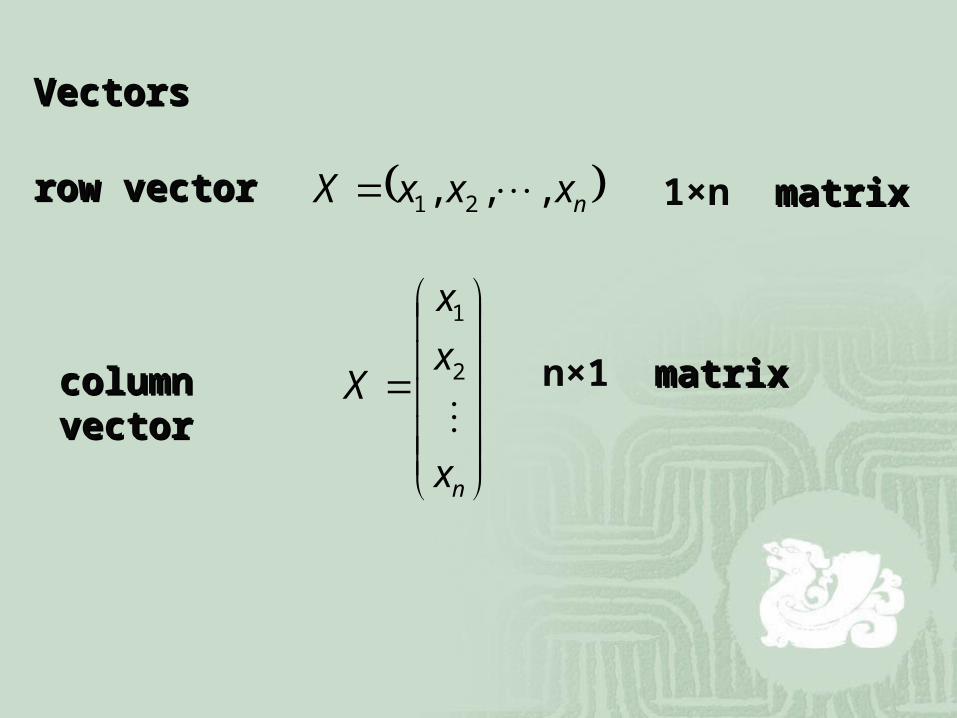
VectorsVectors
row vector row vector
column vector column vector
nxxxX ,,, 21 1×n matrix matrix
nx
x
x
X2
1
n×1 matrix matrix
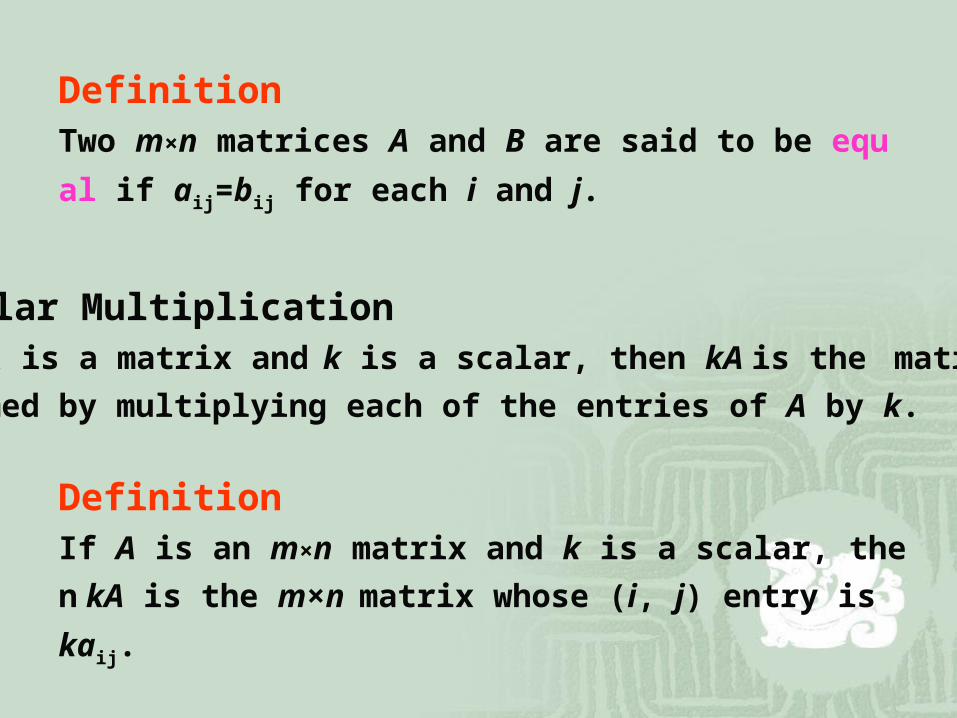
Definition
Two m×n matrices A and B are said to be equal if aij=bij f
or each i and j.
Scalar MultiplicationIf A is a matrix and k is a scalar, then kA is the matrix
formed by multiplying each of the entries of A by k.
Definition
If A is an m×n matrix and k is a scalar, then kA is the m×
n matrix whose (i, j) entry is kaij.
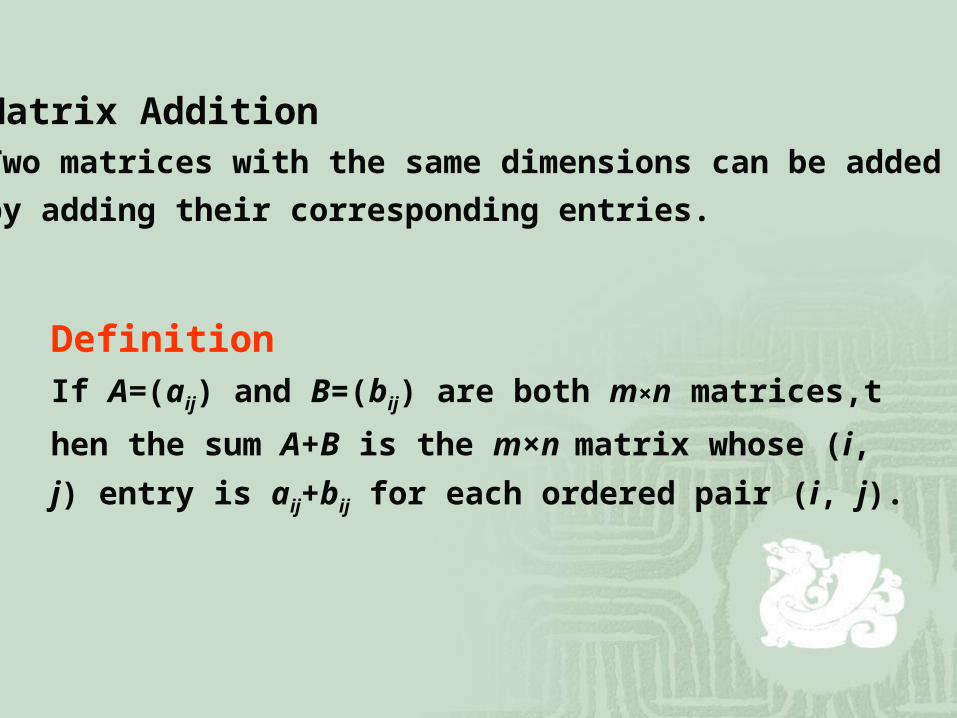
Matrix AdditionTwo matrices with the same dimensions can be added
by adding their corresponding entries.
Definition
If A=(aij) and B=(bij) are both m×n matrices,then the sum
A+B is the m×n matrix whose (i, j) entry is aij+bij for eac
h ordered pair (i, j).
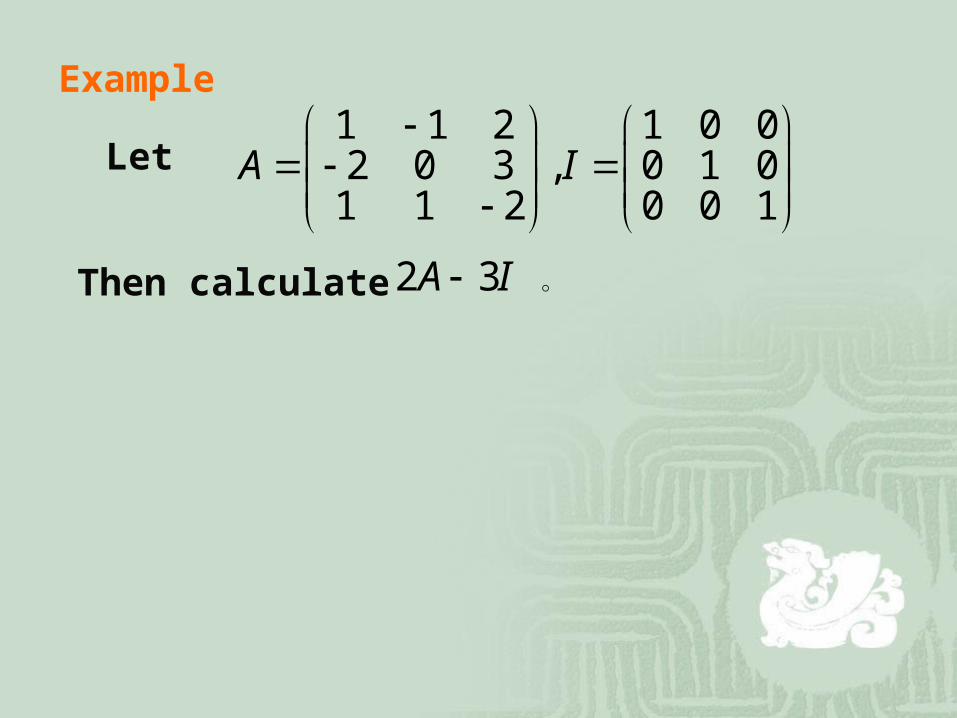
1 1 2 1 0 02 0 3 , 0 1 0
1 1 2 0 0 1A I
2 3A I
Example
Let
Then calculate 。
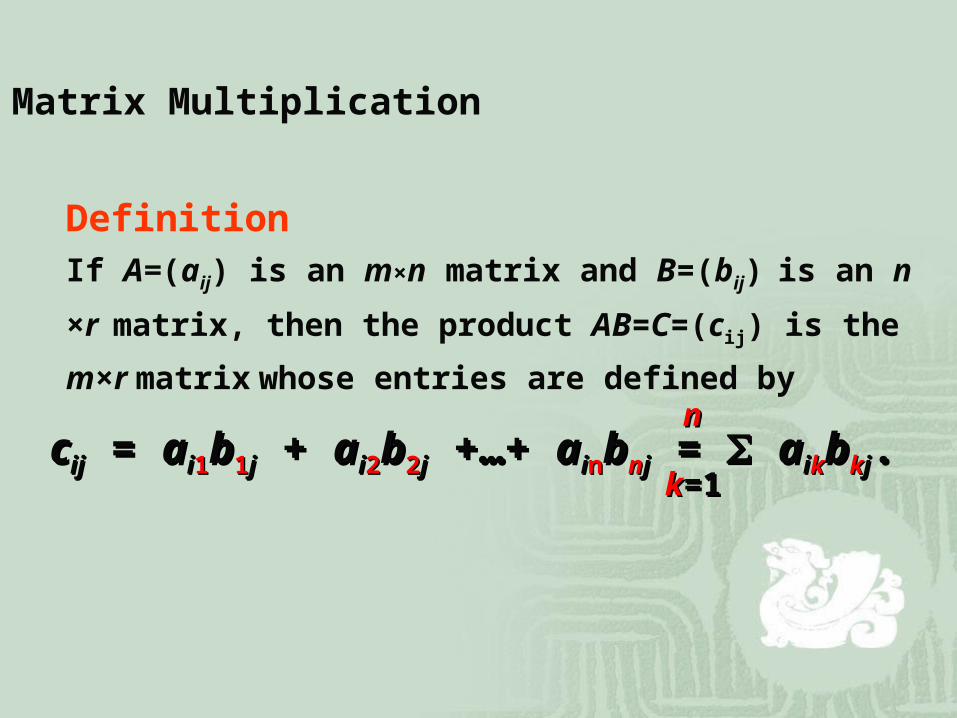
Matrix Multiplication
Definition
If A=(aij) is an m×n matrix and B=(bij) is an n×r matrix, th
en the product AB=C=(cij) is the m×r matrix whose entri
es are defined by
ccijij = = aaii11bb11jj + + aaii22bb22jj +…+ +…+ aaiinnbbnnjj = = aaiikkbbkkjj. .
kk=1=1
nn
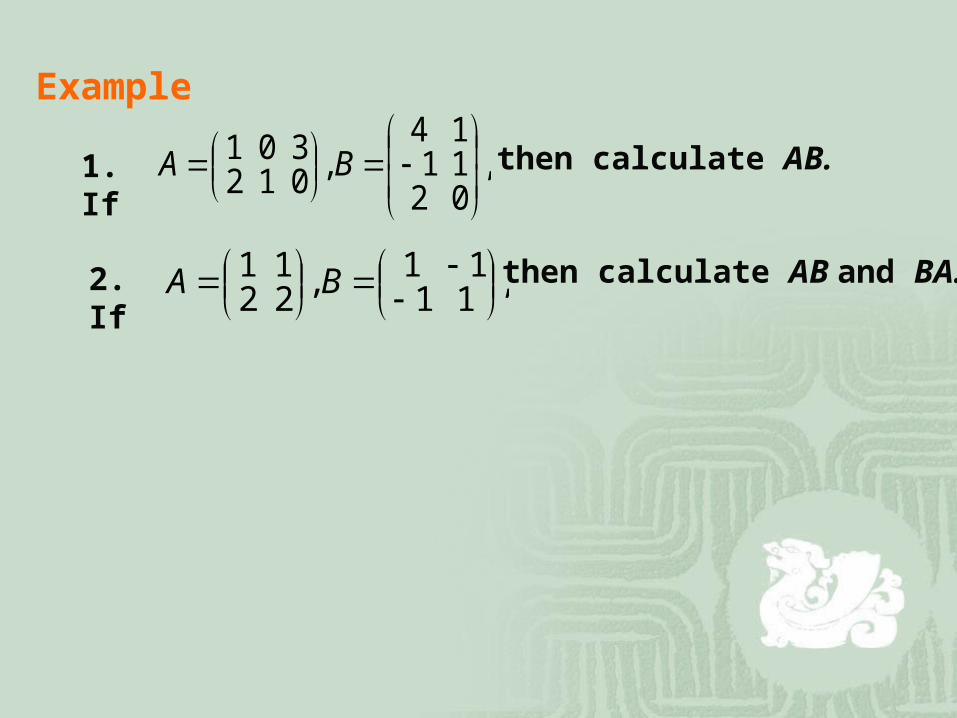
Example
,021114
,012301
BA then calculate AB.1. If
2. If ,1111,22
11
BA then calculate AB and BA.
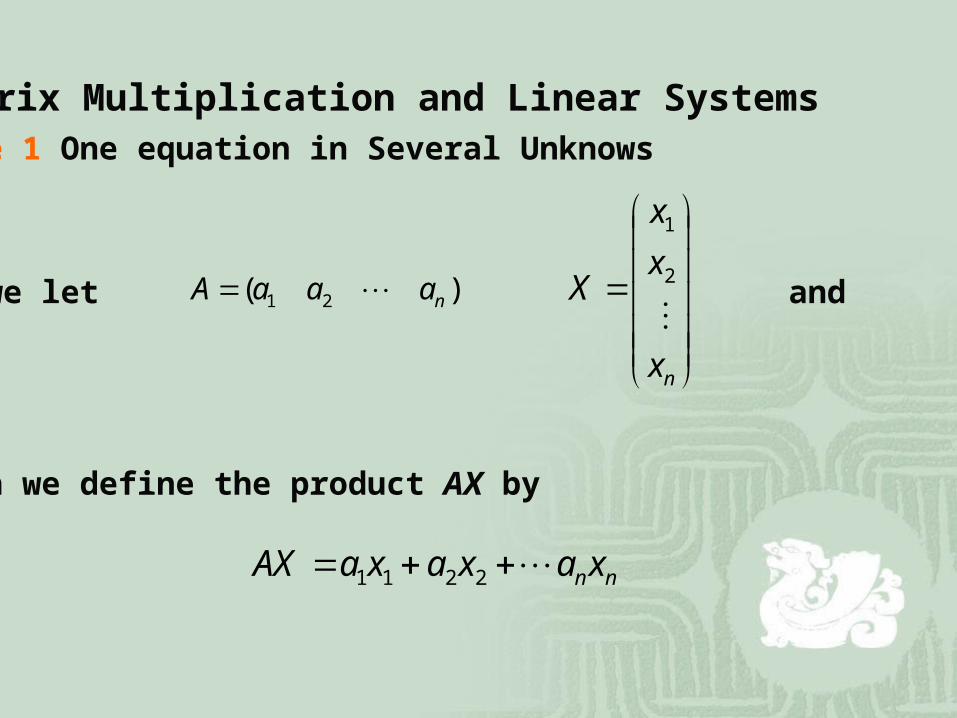
Matrix Multiplication and Linear SystemsCase 1 One equation in Several Unknows
If we let and
then we define the product AX by
)( 21 naaaA
nx
x
x
X2
1
nnxaxaxaAX 2211
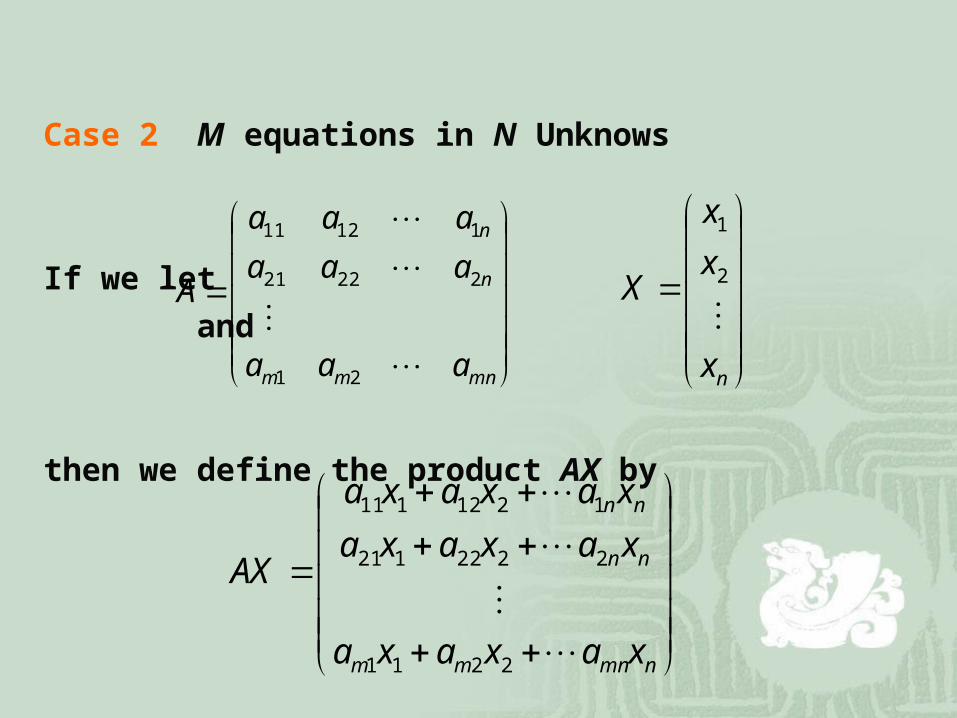
Case 2 M equations in N Unknows
If we let and
then we define the product AX by
mnmm
n
n
aaa
aaa
aaa
A
21
22221
11211
nx
x
x
X2
1
nmnmm
nn
nn
xaxaxa
xaxaxa
xaxaxa
AX
2211
2222121
1212111
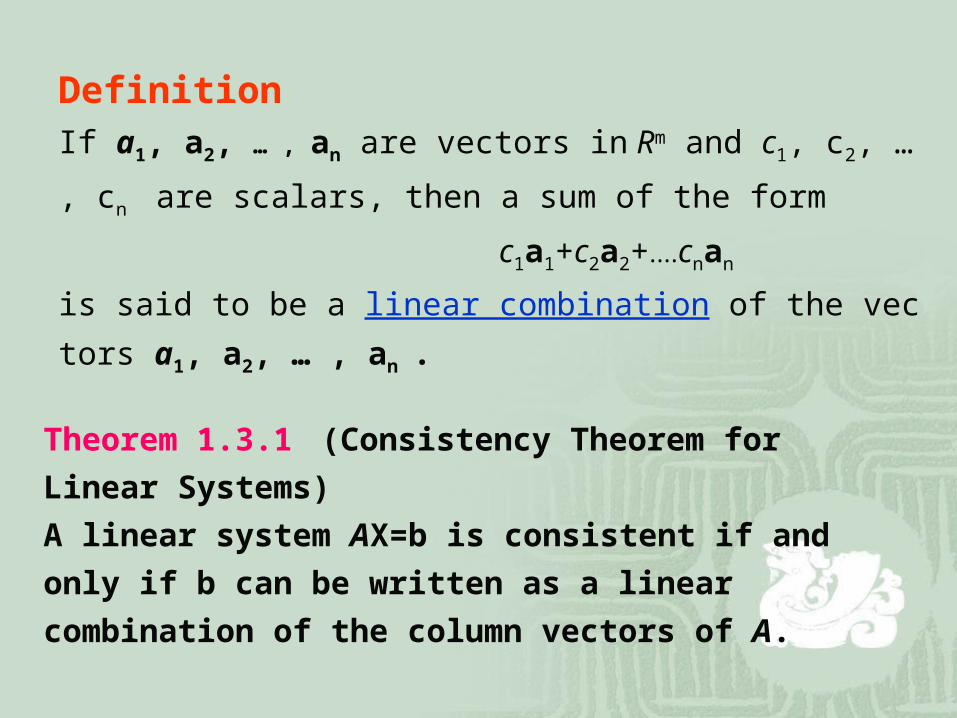
Definition
If a1, a2, … , an are vectors in Rm and c1, c2, … , cn are scalars,
then a sum of the form
c1a1+c2a2+‥‥cnan
is said to be a linear combination of the vectors a1, a2, … , an .
Theorem 1.3.1 (Consistency Theorem for Linear
Systems)
A linear system AX=b is consistent if and only if b can be
written as a linear combination of the column vectors of
A.
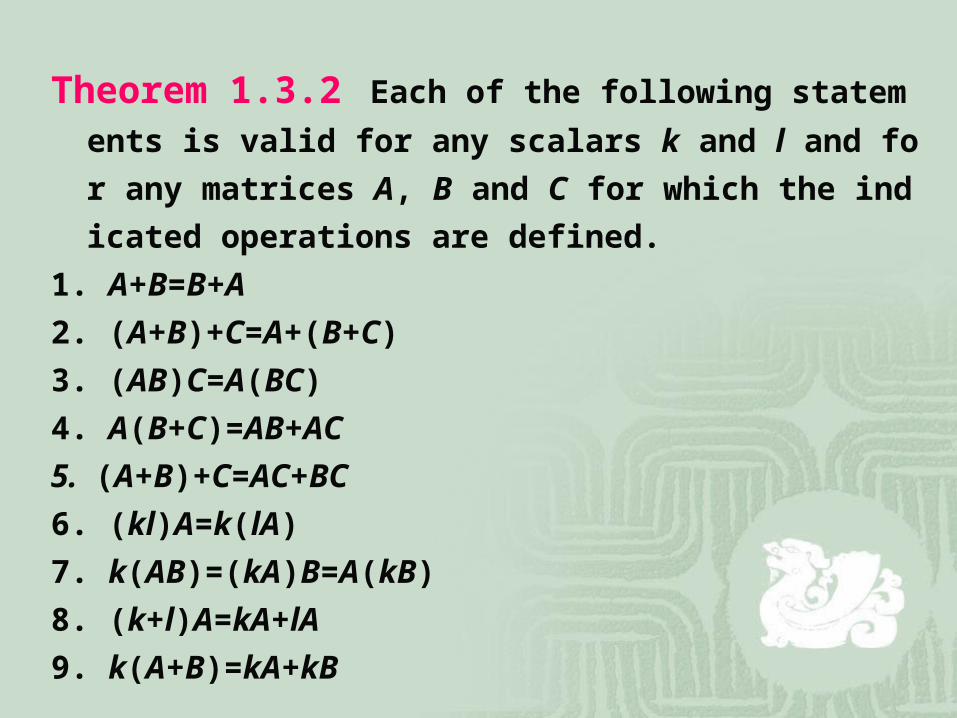
Theorem 1.3.2 Each of the following statements is vali
d for any scalars k and l and for any matrices A, B and
C for which the indicated operations are defined.
1. A+B=B+A
2. (A+B)+C=A+(B+C)
3. (AB)C=A(BC)
4. A(B+C)=AB+AC
5. (A+B)+C=AC+BC
6. (kl)A=k(lA)
7. k(AB)=(kA)B=A(kB)
8. (k+l)A=kA+lA
9. k(A+B)=kA+kB
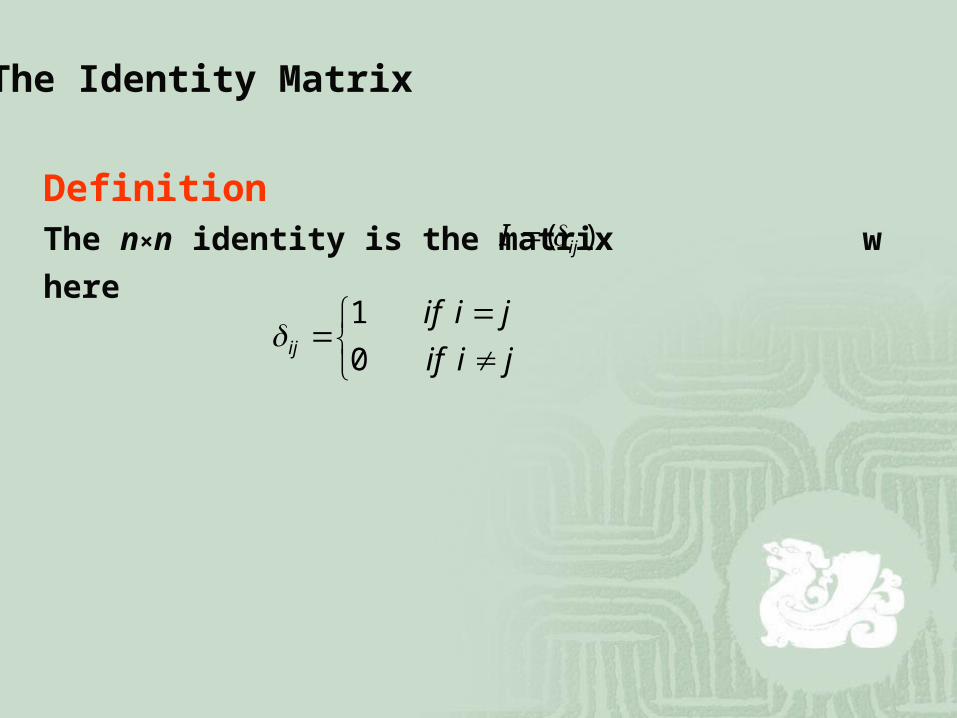
The Identity Matrix
Definition
The n×n identity is the matrix where)( ijI
jiif
jiifij 0
1
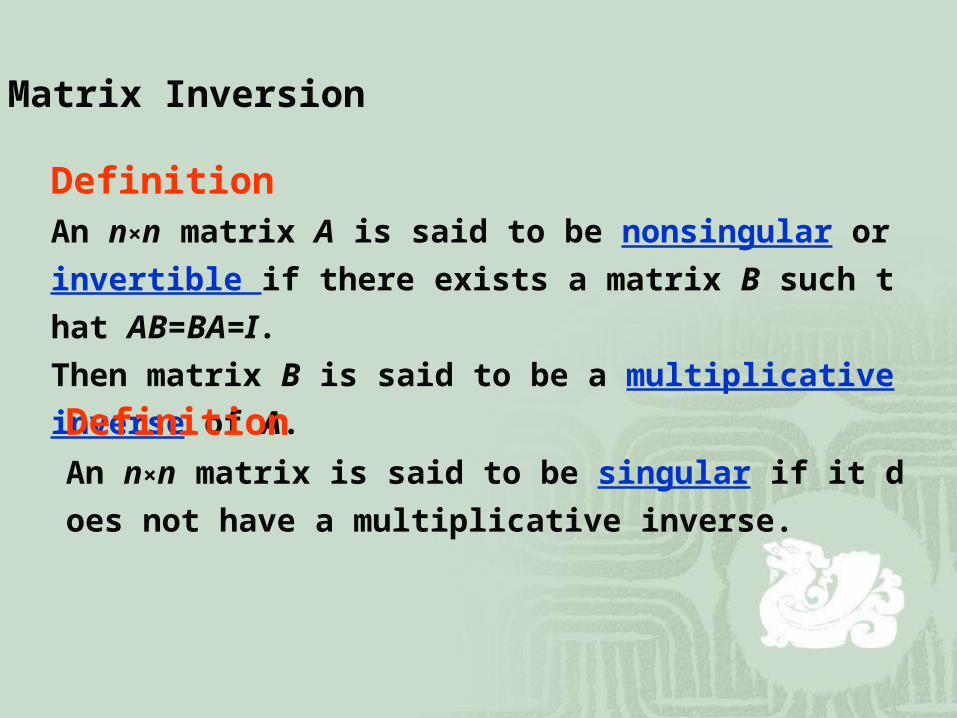
Matrix Inversion
Definition
An n×n matrix A is said to be nonsingular or invertible if
there exists a matrix B such that AB=BA=I.
Then matrix B is said to be a multiplicative inverse of A.
Definition
An n×n matrix is said to be singular if it does not have a
multiplicative inverse.
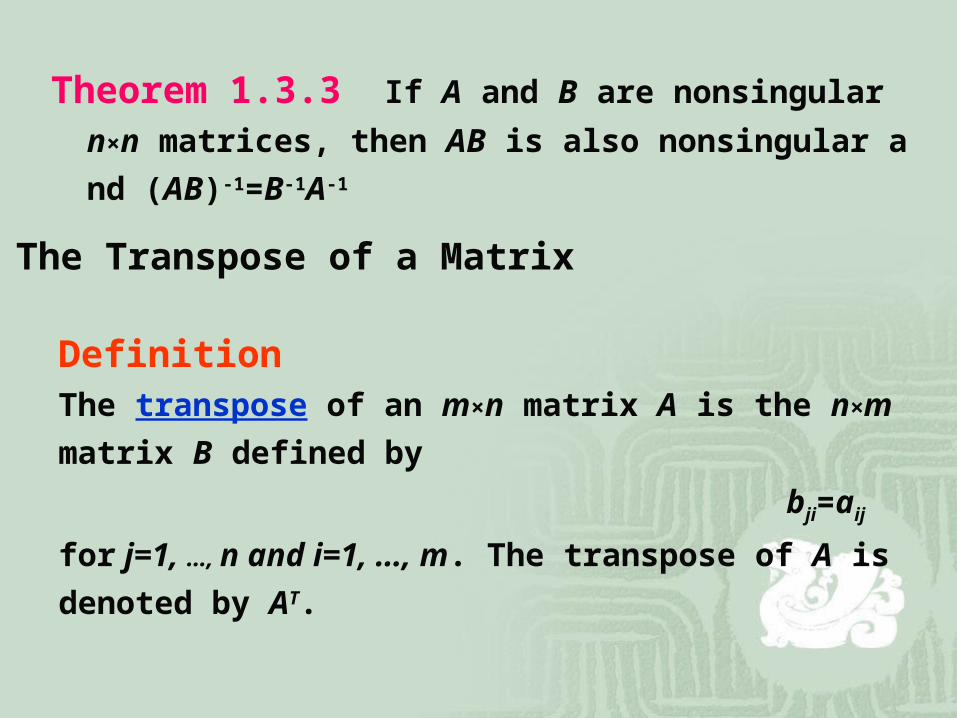
Theorem 1.3.3 If A and B are nonsingular n×n matrices,
then AB is also nonsingular and (AB)-1=B-1A-1
The Transpose of a Matrix
Definition
The transpose of an m×n matrix A is the n×m matrix B d
efined by
bji=aij
for j=1, …, n and i=1, …, m. The transpose of A is denote
d by AT.
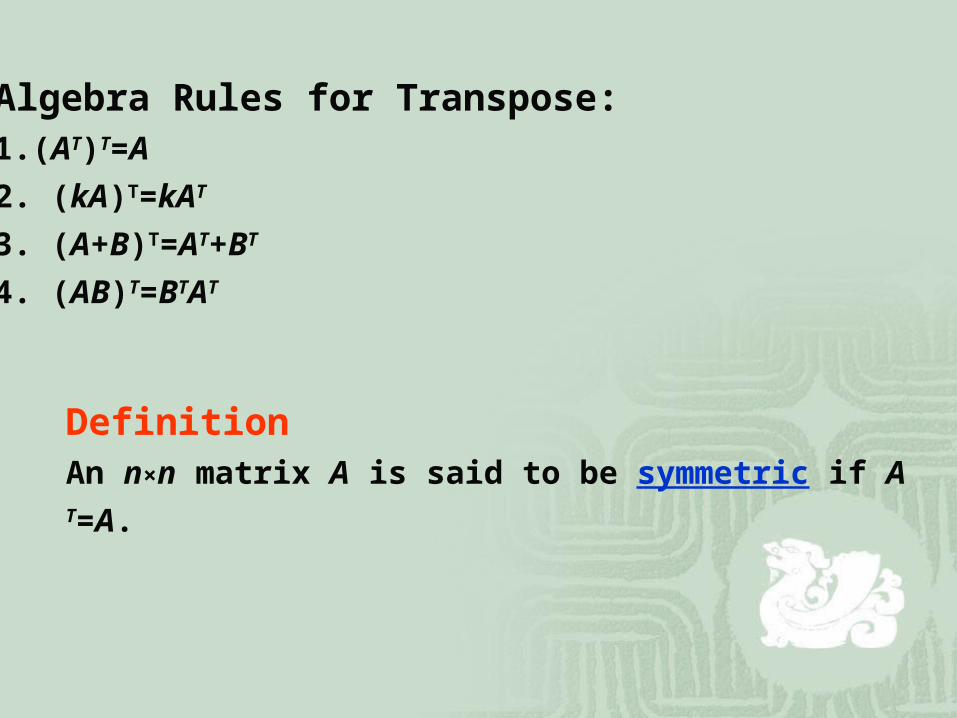
Algebra Rules for Transpose:1. (AT)T=A
2. (kA)T=kAT
3. (A+B)T=AT+BT
4. (AB)T=BTAT
Definition
An n×n matrix A is said to be symmetric if AT=A.
4. Elementary Matrices
If we start with the identity matrix I and then perform
exactly one elementary row operation, the resulting matrix
is called an elementary matrix.
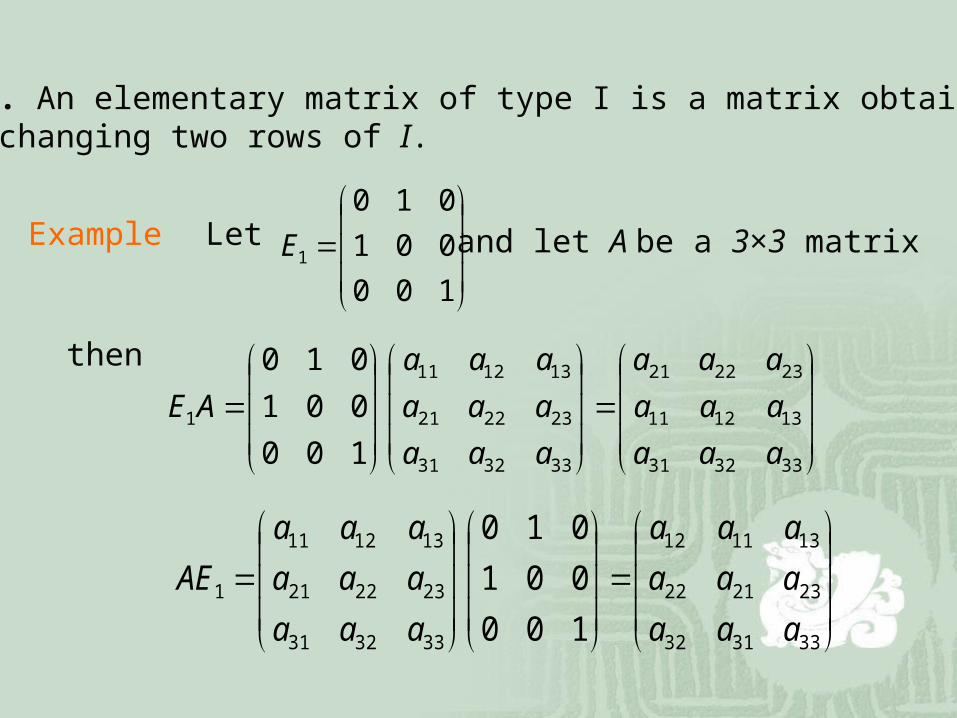
Type I. An elementary matrix of type I is a matrix obtained by interchanging two rows of I.
Example Let
100
001
010
1E and let A be a 3×3 matrix
then
333231
131211
232221
333231
232221
131211
1
100
001
010
aaa
aaa
aaa
aaa
aaa
aaa
AE
333132
232122
131112
333231
232221
131211
1
100
001
010
aaa
aaa
aaa
aaa
aaa
aaa
AE
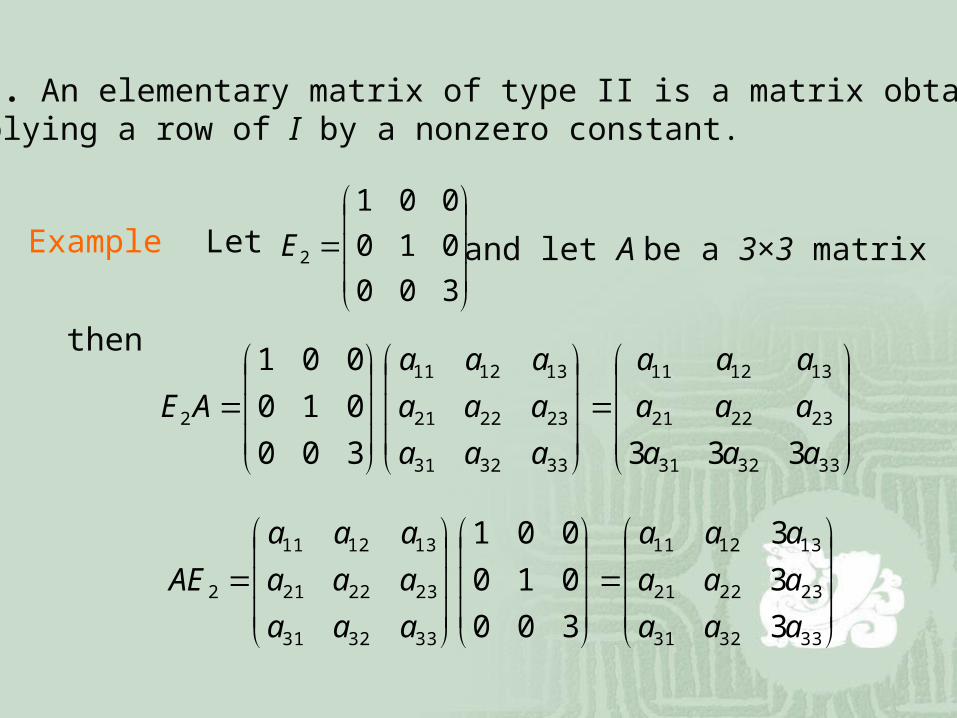
Type II. An elementary matrix of type II is a matrix obtained by multiplying a row of I by a nonzero constant.
Example Let
300
010
001
2E and let A be a 3×3 matrix
then
333231
232221
131211
333231
232221
131211
2
333300
010
001
aaa
aaa
aaa
aaa
aaa
aaa
AE
333231
232221
131211
333231
232221
131211
2
3
3
3
300
010
001
aaa
aaa
aaa
aaa
aaa
aaa
AE
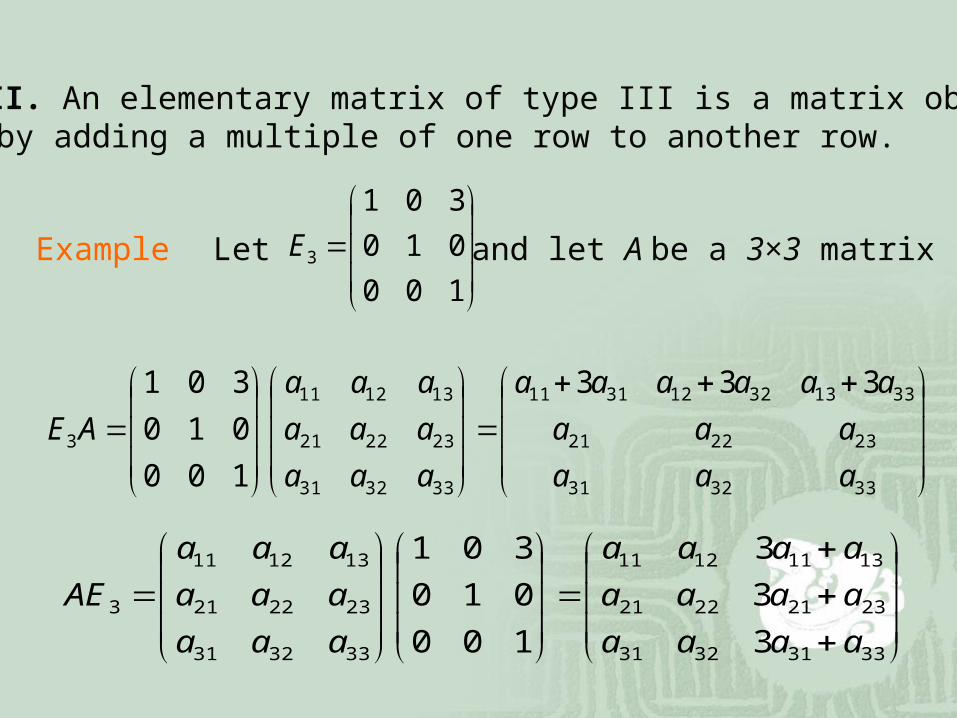
Type III. An elementary matrix of type III is a matrix obtained from I by adding a multiple of one row to another row.
Example Let
100
010
301
3E and let A be a 3×3 matrix
333231
232221
331332123111
333231
232221
131211
3
333
100
010
301
aaa
aaa
aaaaaa
aaa
aaa
aaa
AE
33313231
23212221
13111211
333231
232221
131211
3
3
3
3
100
010
301
aaaa
aaaa
aaaa
aaa
aaa
aaa
AE
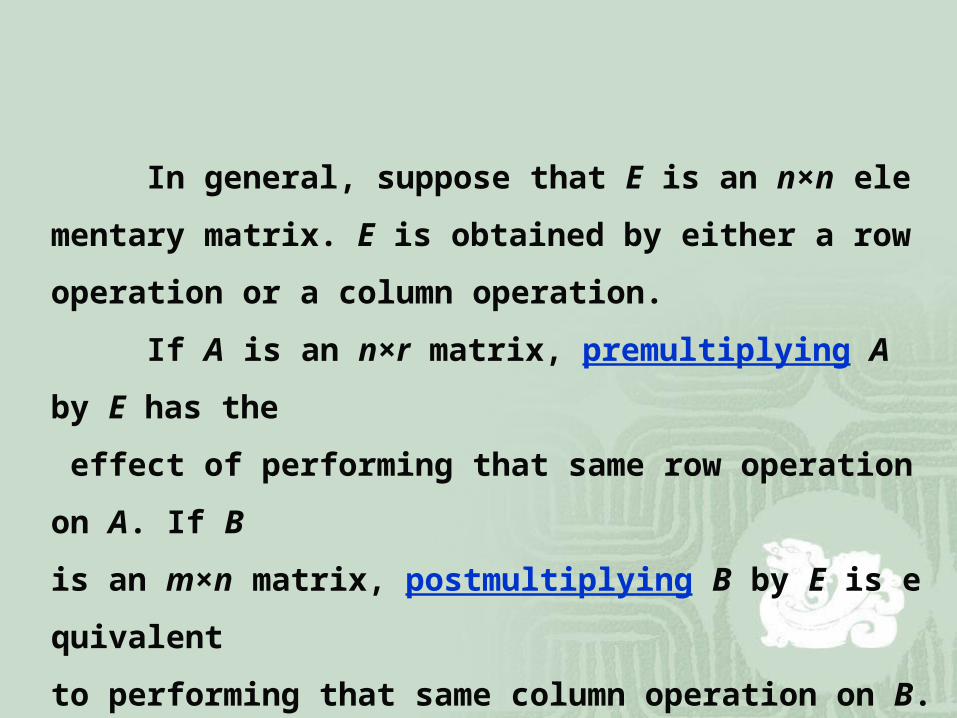
In general, suppose that E is an n×n elementary matri
x. E is obtained by either a row operation or a column op
eration.
If A is an n×r matrix, premultiplying A by E has the
effect of performing that same row operation on A. If B
is an m×n matrix, postmultiplying B by E is equivalent
to performing that same column operation on B.
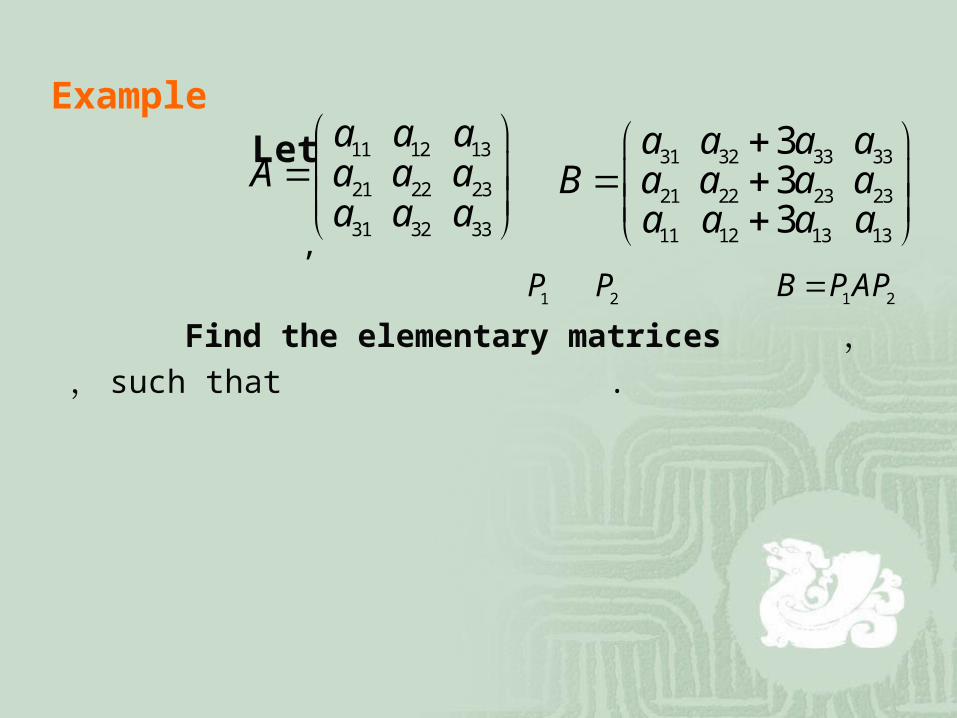
Example
Let ,
Find the elementary matrices , , such that .1P 2P 1 2B PAP
11 12 13
21 22 23
31 32 33
a a aA a a a
a a a
31 32 33 33
21 22 23 23
11 12 13 13
333
a a a aB a a a a
a a a a
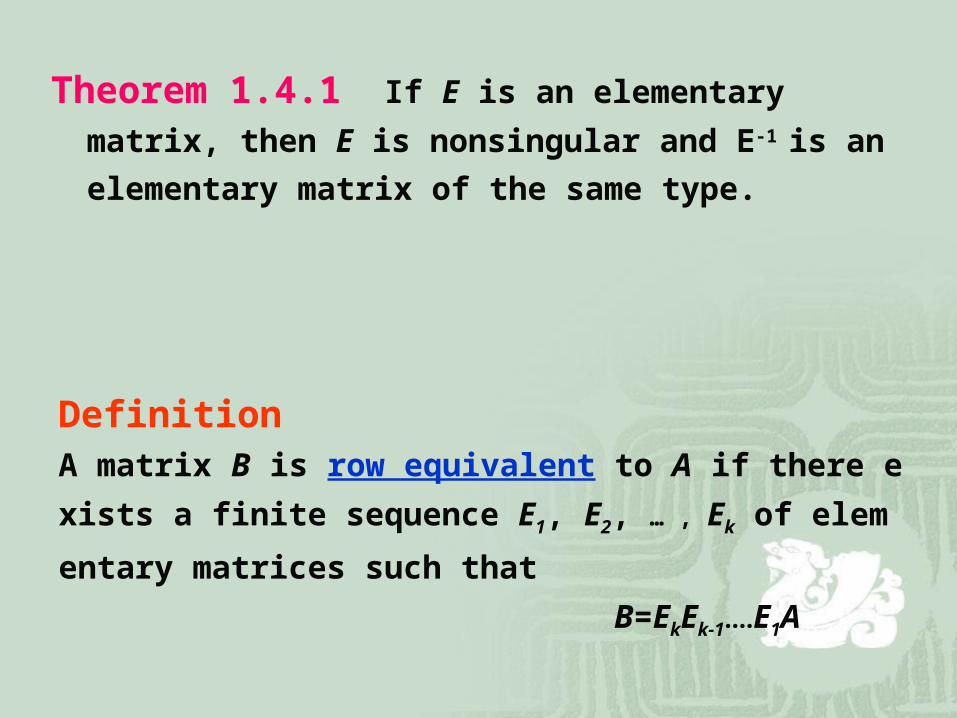
Theorem 1.4.1 If E is an elementary matrix, then E is
nonsingular and E-1 is an elementary matrix of the
same type.
Definition
A matrix B is row equivalent to A if there exists a finite
sequence E1, E2, … , Ek of elementary matrices such that
B=EkEk-1‥‥E1A
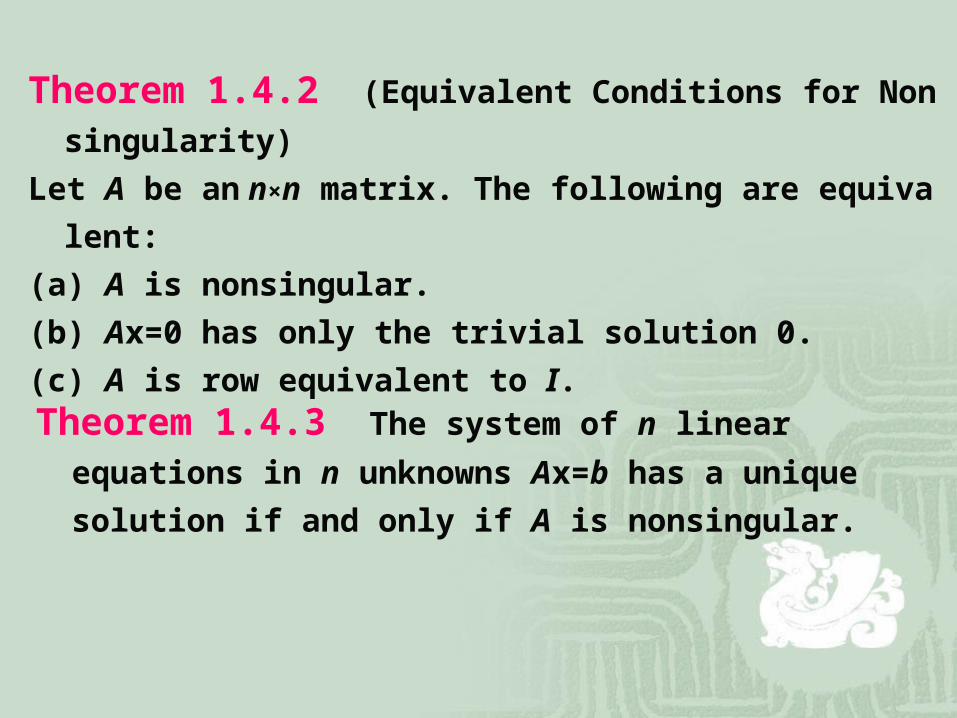
Theorem 1.4.2 (Equivalent Conditions for Nonsingularity)
Let A be an n×n matrix. The following are equivalent:
(a) A is nonsingular.
(b) Ax=0 has only the trivial solution 0.
(c) A is row equivalent to I.
Theorem 1.4.3 The system of n linear equations in n
unknowns Ax=b has a unique solution if and only if A
is nonsingular.
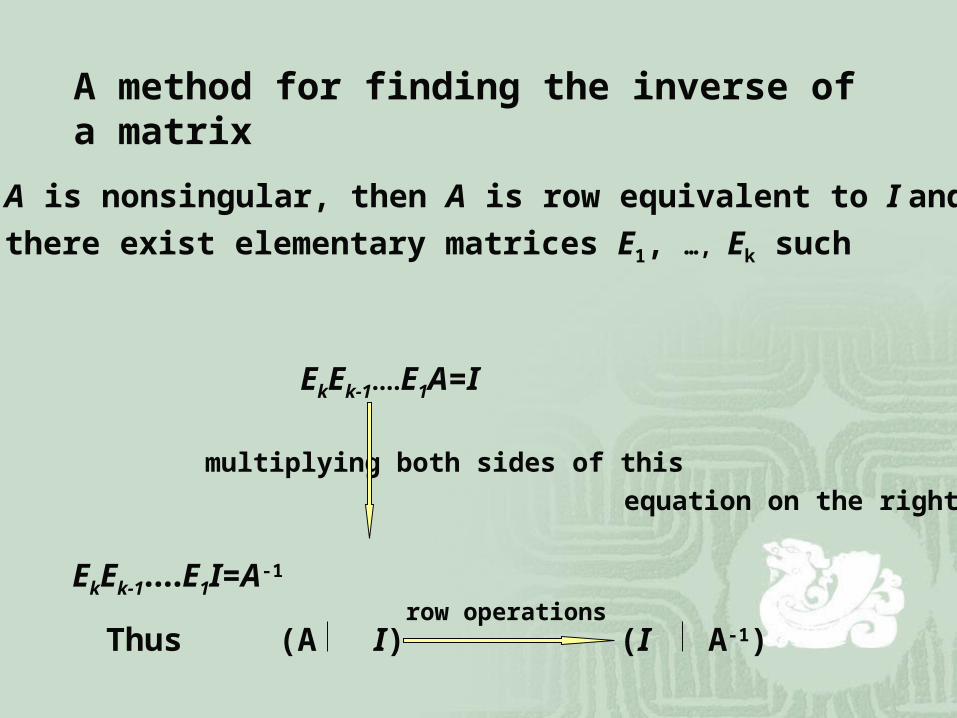
If A is nonsingular, then A is row equivalent to I and
hence there exist elementary matrices E1, …, Ek such
that
EkEk-1‥‥E1A=I multiplying both sides of this
equation on the right by A-1
EkEk-1‥‥E1I=A-1
Thus (A I) (I A-1) row operations
A method for finding the inverse of a matrix
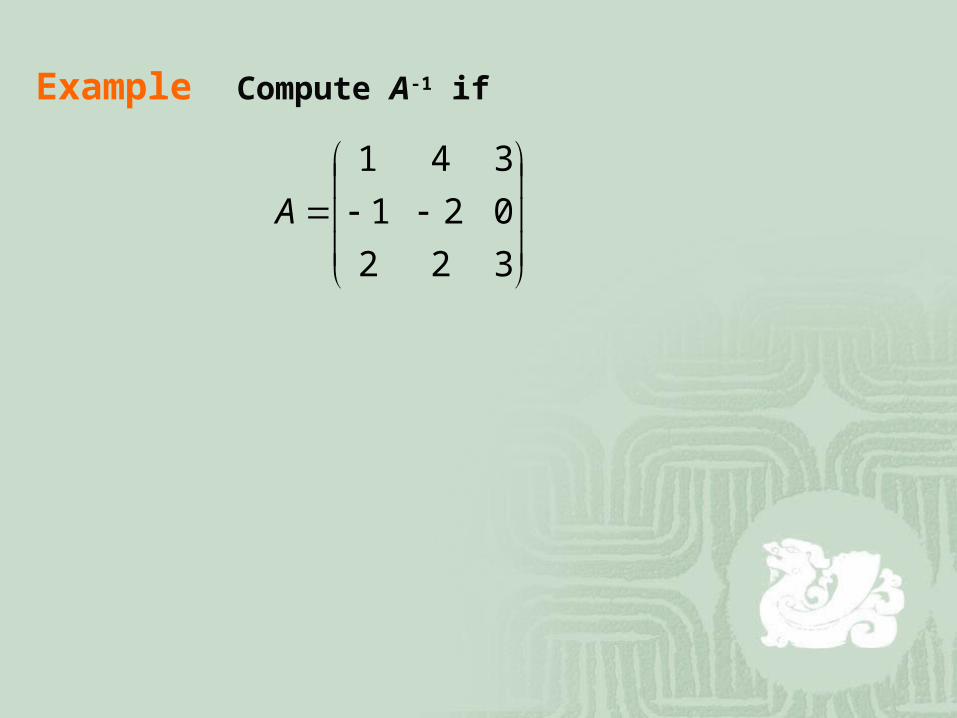
Example Compute A-1 if
322
021
341
A
Example Solve the system
8322
122
1234
321
21
321
xxx
xx
xxx
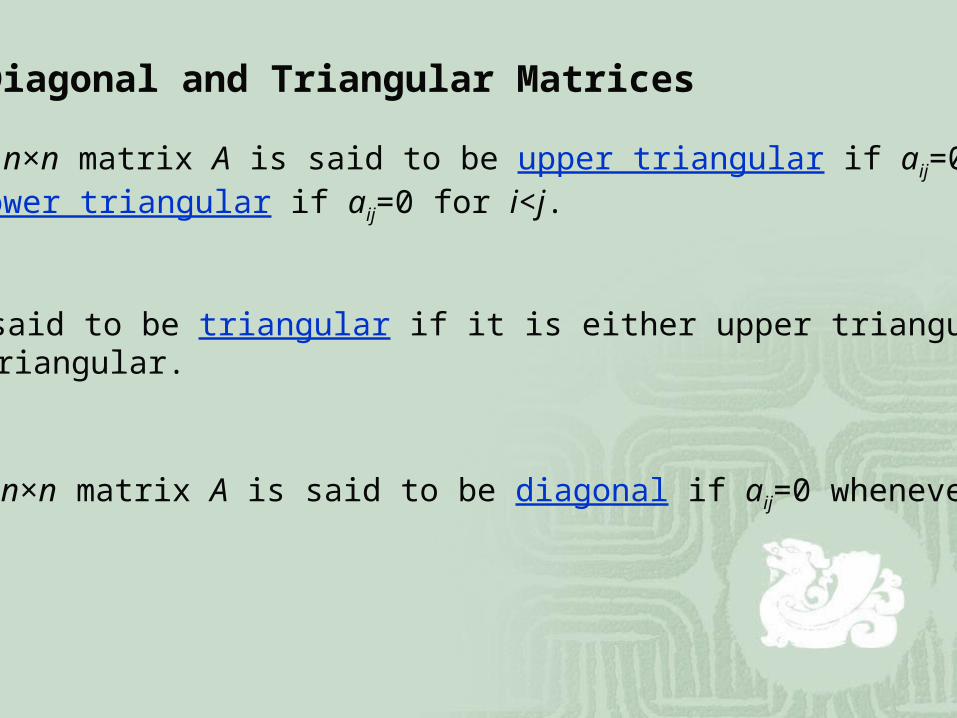
Diagonal and Triangular Matrices
An n×n matrix A is said to be upper triangular if aij=0 for i>j and lower triangular if aij=0 for i<j.
An n×n matrix A is said to be diagonal if aij=0 whenever i≠j .
A is said to be triangular if it is either upper triangular or lower triangular.
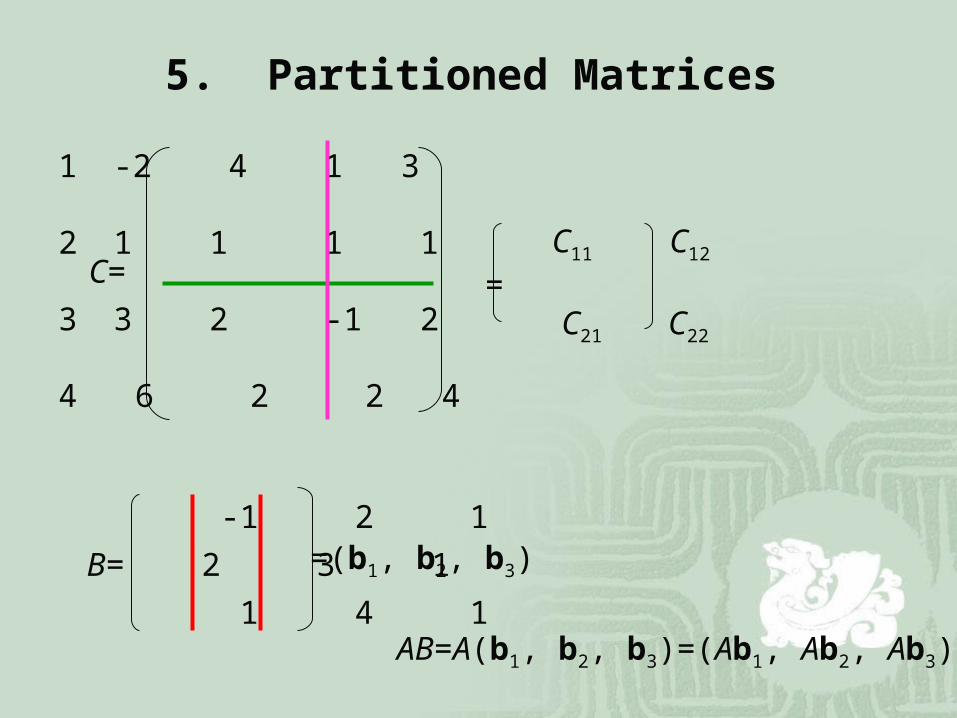
5. Partitioned Matrices
C=
1 -2 4 1 3
2 1 1 1 1
3 3 2 -1 2
4 6 2 2 4
C11 C12
= C21 C22
-1 2 1
B= 2 3 1
1 4 1
=(b1, b2, b3)
AB=A(b1, b2, b3)=(Ab1, Ab2, Ab3)
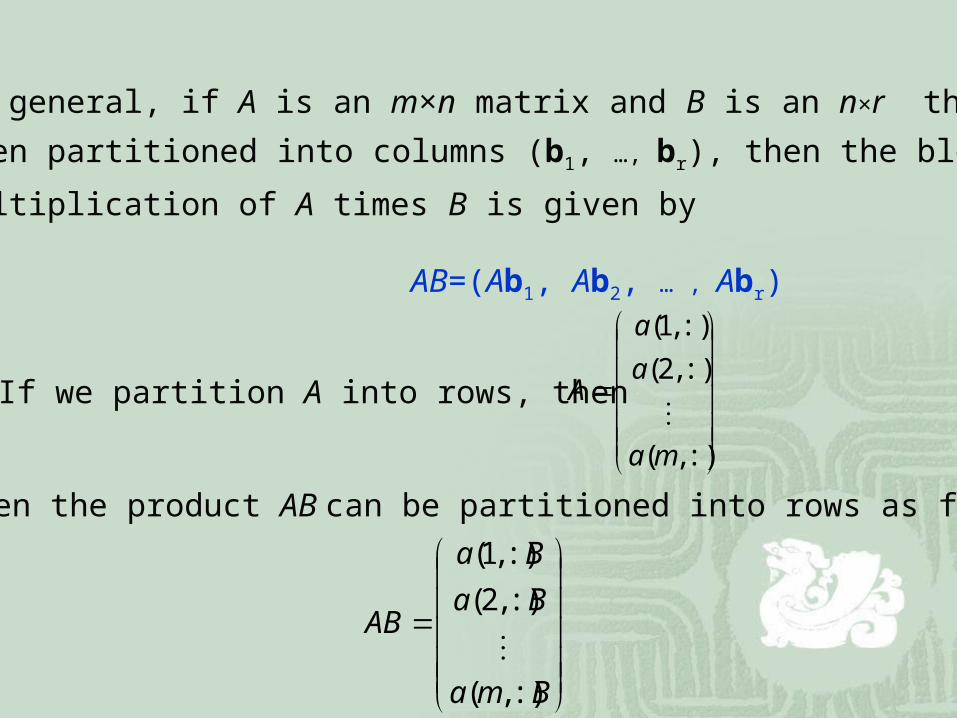
In general, if A is an m×n matrix and B is an n×r that has
been partitioned into columns (b1, …, br), then the block
multiplication of A times B is given by
AB=(Ab1, Ab2, … , Abr)
If we partition A into rows, then
:),(
:),2(
:),1(
ma
a
a
A
Then the product AB can be partitioned into rows as follows:
Bma
Ba
Ba
AB
:),(
:),2(
:),1(
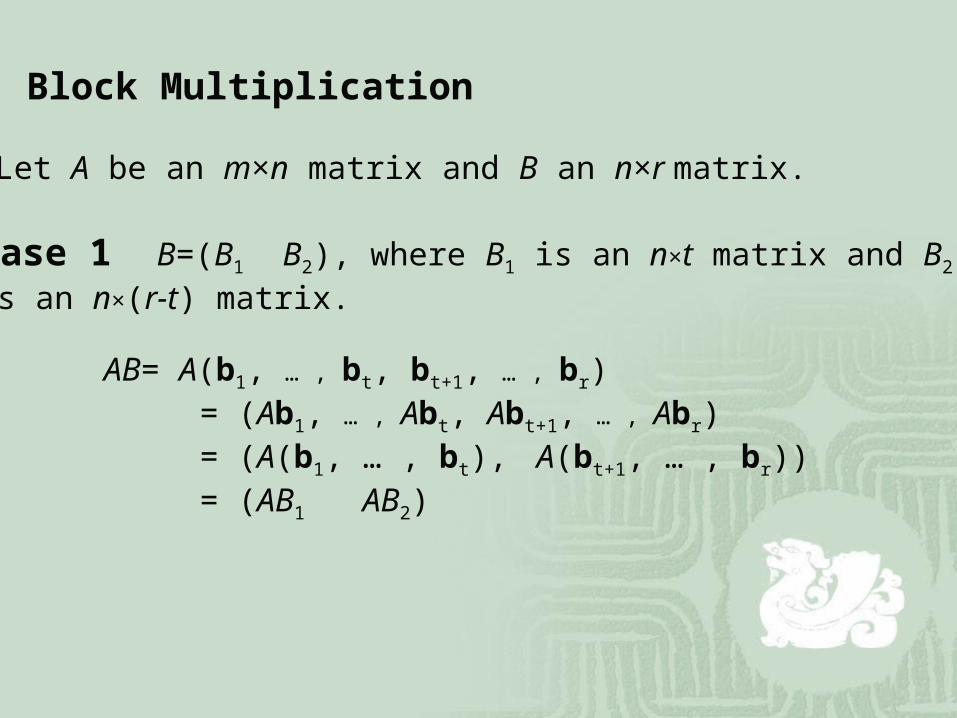
Block Multiplication
Let A be an m×n matrix and B an n×r matrix.
Case 1 B=(B1 B2), where B1 is an n×t matrix and B2
is an n×(r-t) matrix.
AB= A(b1, … , bt, bt+1, … , br) = (Ab1, … , Abt, Abt+1, … , Abr) = (A(b1, … , bt), A(bt+1, … , br)) = (AB1 AB2)
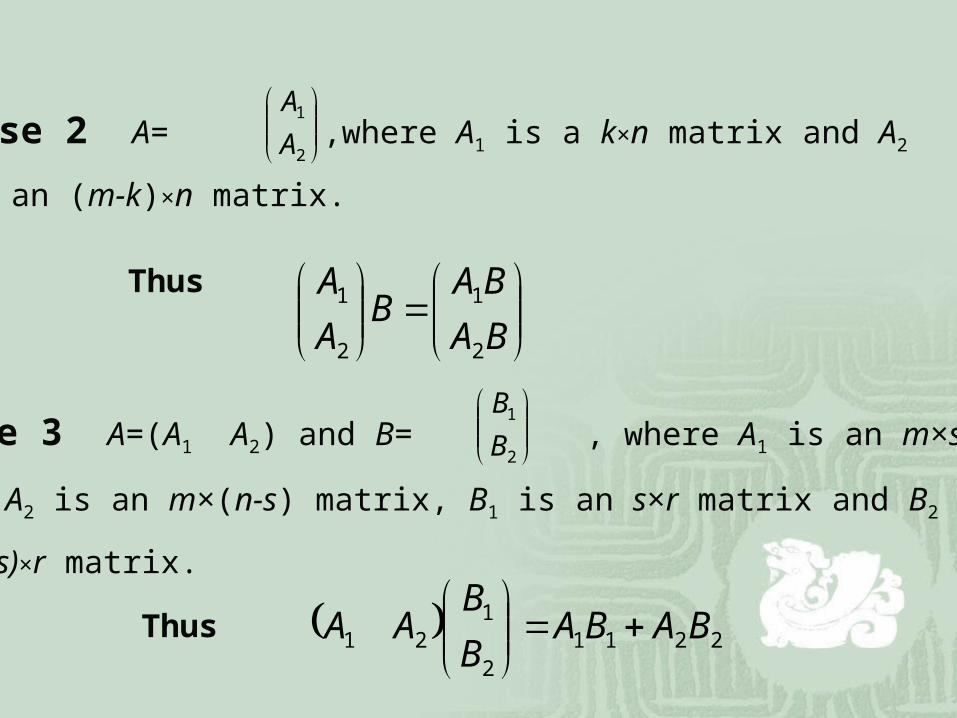
Case 2 A= ,where A1 is a k×n matrix and A2
is an (m-k)×n matrix.
2
1
A
A
Thus
BA
BAB
A
A
2
1
2
1
Case 3 A=(A1 A2) and B= , where A1 is an m×s matrix
and A2 is an m×(n-s) matrix, B1 is an s×r matrix and B2 is an
(n-s)×r matrix.
2
1
B
B
Thus 22112
121 BABAB
BAA
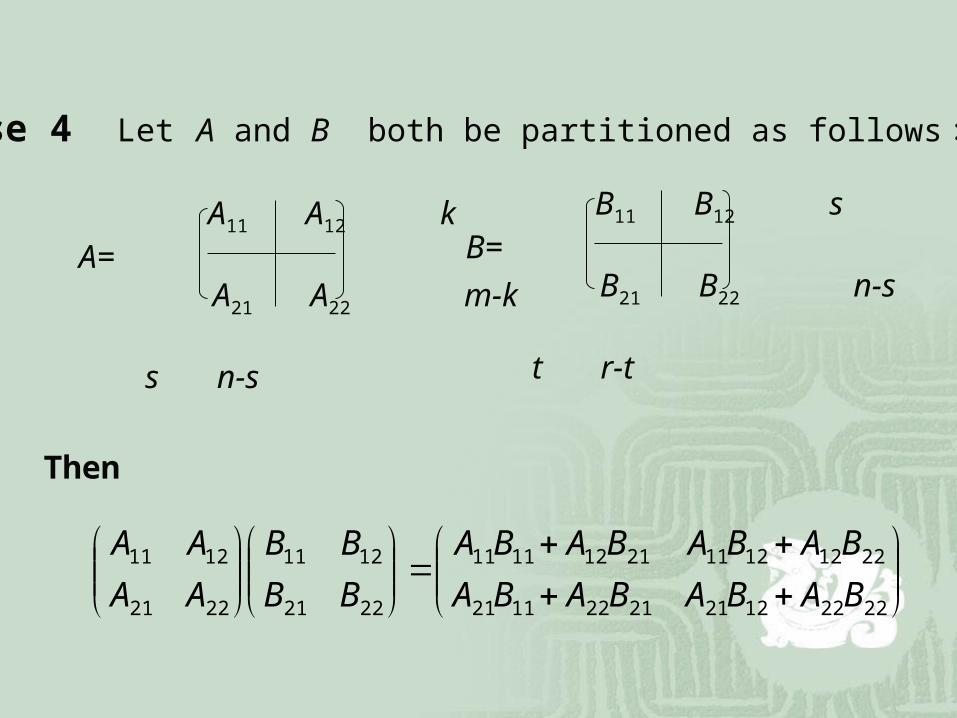
Case 4 Let A and B both be partitioned as follows :
A11 A12 kA= A21 A22 m-k
s n-s
B11 B12 sB= B21 B22 n-s
t r-t
2222122121221121
2212121121121111
2221
1211
2221
1211
BABABABA
BABABABA
BB
BB
AA
AA
Then
In general, if the blocks have the proper
dimensions, the block multiplication can be
carried out in the same manner as ordinary
matrix multiplication.
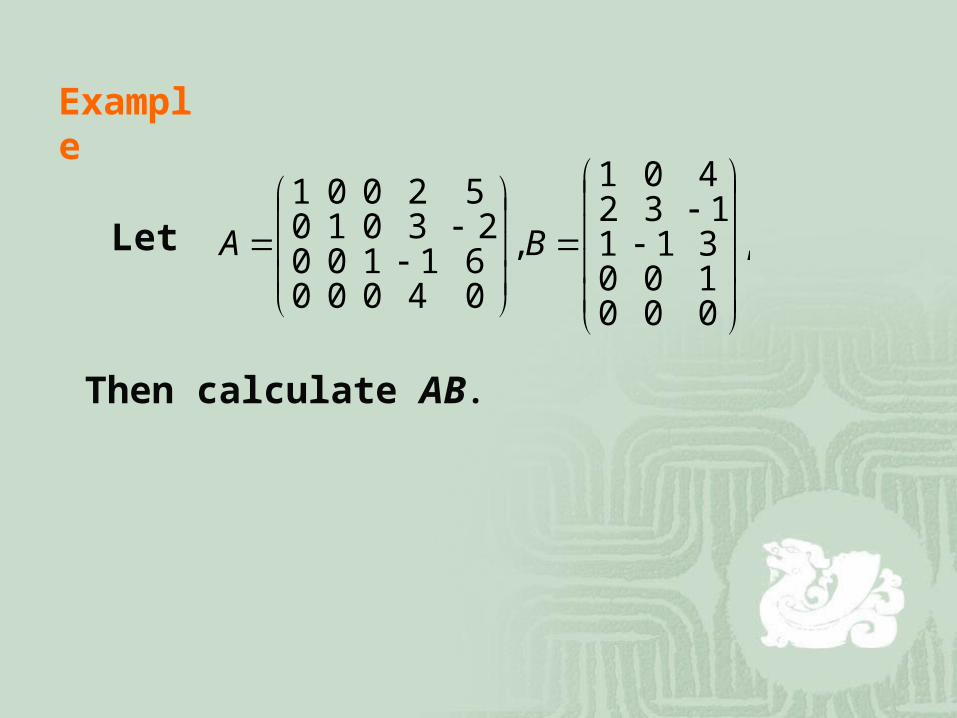
,
000100311132
401
,
040006110023010
52001
BA
Example
Let
Then calculate AB.
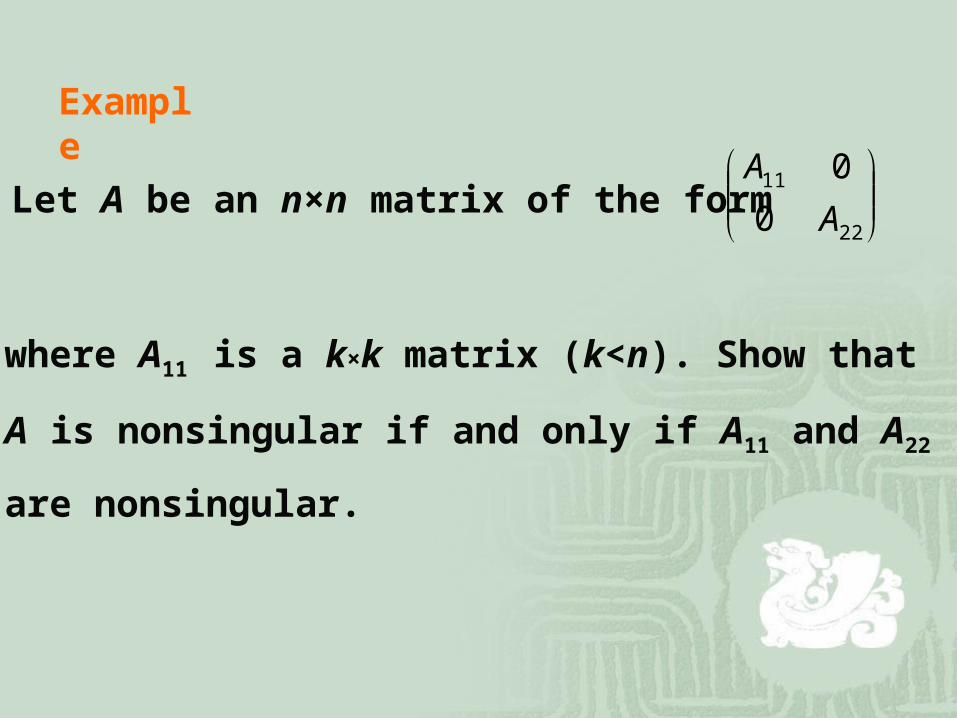
Example
Let A be an n×n matrix of the form
22
11
0
0
A
A
where A11 is a k×k matrix (k<n). Show that
A is nonsingular if and only if A11 and A22
are nonsingular.



![Chapter 01: Relational Databases - static.packt-cdn.com · Chapter 01: Relational Databases. Chapter 1 [ 2 ] Chapter 1 [ 3 ] Chapter 1 [ 4 ] Chapter 1 [ 5 ] Chapter 02: PostgreSQL](https://img.pdfslide.us/doc/110x75/5e1e7793cab1f72f70306c15/chapter-01-relational-databases-chapter-01-relational-databases-chapter-1-.jpg)



![Chapter 1: Getting Started with Alteryx · Chapter 1 [ 42 ] Chapter 4: Writing Fast and Accurate. Chapter 1 [ 43 ] Chapter 1 [ 44 ]](https://img.pdfslide.us/doc/110x75/5e903c60f316447eb43c0e7a/chapter-1-getting-started-with-alteryx-chapter-1-42-chapter-4-writing-fast.jpg)


![Chapter 1: Qlik Sense Self-Service Model€¦ · Qlik Sense. Graphics Chapter 1 [ 4 ] Graphics Chapter 1 [ 5 ] Graphics Chapter 1 [ 6 ] Graphics Chapter 1 [ 7 ] Chapter 3: Security](https://img.pdfslide.us/doc/110x75/603a754026637d7e176f5238/chapter-1-qlik-sense-self-service-model-qlik-sense-graphics-chapter-1-4-graphics.jpg)