Embed Size (px)
Citation preview
Chaos, Solitons and Fractals 29 (2006) 342–348
www.elsevier.com/locate/chaos
Chaotic synchronization and control in nonlinear-coupledHindmarsh–Rose neural systems
Hongjie Yu *, Jianhua Peng
Department of Engineering Mechanics, Shanghai Jiao Tong University, 200030 Shanghai, China
Accepted 16 August 2005
Abstract
A new approach for chaotic synchronization of Hindmarsh–Rose (HR) neural networks linked by special nonlinearcoupling function is proposed. The method expands SC method in investigation of chaotic synchronization based onthe stability criterion. We provide the error evolutional equation to determine the stability of synchronized states, whichhas very simple forms corresponding to matrix of star coupling coefficients. The synchronization can be achieved with-out the requirement to calculate the maximum Lyapunov exponents when the coupling strengths are taken as referencevalues, and there is a region of stability around them. Besides, the stability criterion control method is applied to controlchaotic behaviors of individual Hindmarsh–Rose neuron model. The chaotic orbit is stabilized on 5spike/burst orbitembedded in the chaotic attractor by an input of the nonlinear time-continuous feedback perturbation to membranepotential.� 2005 Elsevier Ltd. All rights reserved.
1. Introduction
In recent years, the synchronization and control of chaos has been widely studied [1–9]. It has also been experimen-tally observed in many systems [10–15]. Chaotic synchronizations and control in neurons and neural networks haveattracted particular attention [16–20]. It is very likely that control and synchronization of chaos and hyperchaos playimportant roles in the field of biological and artificial neural networks. The observations of synchronous neural activityin the central nervous system have encouraged a great deal of theoretical work on synchronization in coupled neuralnetworks. These observations suggest that the neural activity is a cooperative process of neurons and the synchroniza-tion plays a vital role in solving the so-called binding problem of information processing in the brain. The problem isrelated to the fact that processing of information is dispersed among different areas of the brain. The existence ofsynchronous oscillations tends to favor the view that the processing of information in the brain is carried by popula-tions of neurons, and not by individual cell.
Irregular bursting chaos is seen in the Hindmarsh–Rose (HR) model. The HR model was constructed from voltageclamp data to provide a simple description of the patterned activity seen in molluscan neurons. Wang et al. [16] inves-tigated the time interval sequences and the spatiotemporal patterns of the firings of coupled neuronal network in 1993.
0960-0779/$ - see front matter � 2005 Elsevier Ltd. All rights reserved.doi:10.1016/j.chaos.2005.08.075
* Corresponding author.E-mail address: [email protected] (H. Yu).

H. Yu, J. Peng / Chaos, Solitons and Fractals 29 (2006) 342–348 343
Recently, phase synchronization of two linearly coupled chaotic neurons [6], chaos controlling [18], slow regularizationthrough chaotic oscillation transfer [19] in the model of HR neurons have been extensively investigated. A phenomenonof enhancement of neural synchrony by time delay was uncovered in a network of HR neuronal oscillators with time-delayed coupling [20].
We have noticed that synchronization of chaos and hyperchaos are principally studied by using the same linear func-tion of variables from each chaotic oscillator to couple other chaotic oscillators in departed research [5,6,20]. Pecoraand Carroll gave master stability function for any linear coupling of oscillators [5]. Ali and Fang used nonlinear cou-pling feedback functions such as triangle functions and their linear superpositions for synchronization of chaotic andhyperchaotic systems [21]. So far, real forms of coupling functions of linked neurons in neural networks are not clear. Itmaybe is linear coupling functions such as in literature [6]. Furthermore, due to the complexity of information process-ing in brain, it is greatly possible to possess nonlinear coupling function. In this letter, we report a phenomenon of cha-otic synchronization in a HR neural network with nonlinear coupling function that is specially constructed. A method(SC method) based upon the stability criterion of linear systems for synchronizing chaotic systems was proposed by Yuand Liu in 2003 [8], and is expanded here. In this letter, we focus the attention on the synchronization problem of unitsof networks linked by special nonlinear coupling function with matrix of star coupling coefficients. Networks of HRneurons are taken as numerical examples to discuss synchronization behavior of neurons. The phenomenon of stablechaotic synchronization has been found in a certain region around reference value of coupled strength. General masterstability equations are given to examine the stability of synchronous state.
Moreover, one of the keys in process of information retrieval can be the idea of chaos control, namely the possibilityof stabilizing one of the unstable periodic orbits that form a strange attractor. In this letter, the SC control method [9] isalso applied to stabilize the unstable periodic orbit of HR neural model.
2. Chaotic synchronization of two HR neurons
We consider a chaotic continuous system described by
_XðtÞ ¼ FðXðtÞÞ ð1Þ
where X(t) = [x1,x2, . . . ,xn]T 2 Rn is a n-dimensional state vector of the system, and F :Rn ! Rn defines a vector field in
n-dimensional space. We suitably decompose the function F(X(t)) as
_XðtÞ ¼ GðXðtÞÞ �DðXðtÞÞ ð2Þ
where function G(X(t)) = AX(t) is disposed as the linear part of F(X(t)), and it is required that A is a full rank constantmatrix, and all eigenvalues of which have negative real parts. Function �D(X(t)) = F(X(t)) � G(X(t)) is the nonlinearpart of F(X(t)), and D(X(t)) is also called as the nonlinear feedback function. Then the system (1) can be written as
_XðtÞ ¼ AXðtÞ �DðXðtÞ; tÞ ð3Þ
We construct two system nonlinearly coupled by using the difference between feedback functions D(X1(t)) and D(X2(t))as follows:
_X1ðtÞ ¼ AX1ðtÞ �DðX1ðtÞÞ þ a½DðX1ðtÞÞ �DðX2ðtÞÞ� ð4Þ_X2ðtÞ ¼ AX2ðtÞ �DðX2ðtÞÞ þ a½DðX2ðtÞÞ �DðX1ðtÞÞ� ð5Þ
where a is the coupling strength. The systems (4) and (5) are driver and response systems coupled nonlinearly eachother. They are symmetrically coupled. The synchronization error between system (4) and system (5) is defined ase(t) = X1(t) � X2(t). The evolutional equation of the difference e(t) is determined via the linear approximation asfollows:
_eðtÞ ¼ Aþ ð2a� 1Þ oDoX
� �e ð6Þ
Obviously the zero point of e(t) is its equilibrium point. The synchronization between X1 and X2 can be achieved if onlyc = 2a = 1. Because all eigenvalues of the matrix A have negative real parts mentioned as before, according to the sta-bility criterion of linear system _e ¼ Ae, the zero point of synchronization error is asymptotically stable and e(t) tends tozero when t! 1. Then the state vectors X1(t) and X2(t) of systems (4) and (5) are completely synchronized. It is veryuseful to notice that it�s not necessary to calculate the conditional Lyapunov exponents when satisfying 2a = 1 for deter-mining the stability of synchronization. However, when 2a5 1, for examining the stability of the synchronized state,
344 H. Yu, J. Peng / Chaos, Solitons and Fractals 29 (2006) 342–348
it is necessary that all of conditional Lyapunov exponents are negative, and they can be obtained by solving simulta-neously Eqs. (4)–(6).
As an oscillator network constructed by coupling two neurons nonlinearly, we consider a model Hindmarsh–Roseneuron described by the following equations of motion:
_x ¼ y � ax3 þ bx2 þ Iext � z
_y ¼ c� dx2 � y
_z ¼ rðSðx� �xÞ � zÞð7Þ
where x is the membrane potential, y is a recovery variable associated with fast current, z is a slowly changing adap-tation current. Here a = 1.0, b = 3.0, c = 1.0, d = 5.0, S = 4.0, r = 0.006, �x ¼ �1:56, and Iext is the external current in-put, Iext = 3.0. then this system exhibits a multi-time scaled burst-spike chaotic behavior. We now consider a network oftwo HR neurons constructed by coupling nonlinear feedback functions according to difference between D(X1) andD(X2) mentioned above
_x1 ¼ y1 � ax31 þ bx21 þ Iext � z1 þ að�x1 þ ax31 � bx21 þ x2 � ax32 þ bx22Þ_y1 ¼ c� dx21 � y1 þ aðdx21 � dx22Þ_z1 ¼ rðSðx1 � �xÞ � z1Þ
ð8Þ
_x2 ¼ y2 � ax32 þ bx22 þ Iext � z2 þ að�x2 þ ax32 � bx22 þ x1 � ax31 þ bx21Þ_y2 ¼ c� dx22 � y2 þ aðdx22 � dx21Þ_z2 ¼ rðSðx2 � �xÞ � z2Þ
ð9Þ
The matrices A and D(X) can be considered as
A ¼�1 1 �1
0 �1 0
rS 0 �r
264
375; DðXÞ ¼
�xþ ax3 � bx2 � I
�cþ dx2
rS�x
0B@
1CA ð10Þ
The matrix A has negative real eigenvalues (�0.031,�0.975,�1). The results of synchronized state x2/x1 with differentinitial condition
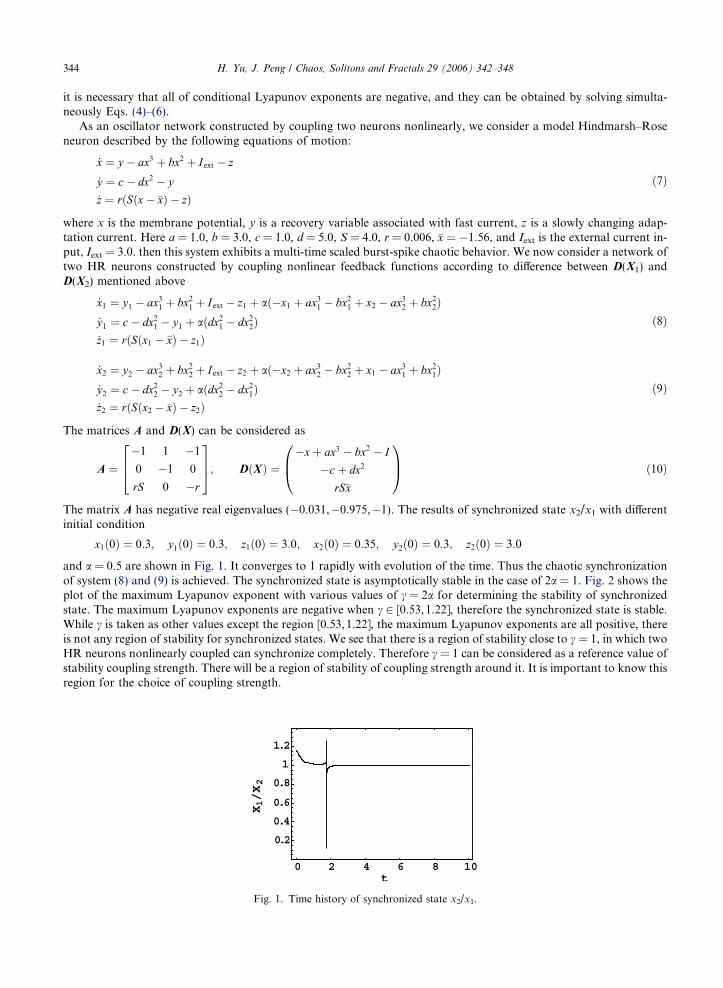
x1ð0Þ ¼ 0:3; y1ð0Þ ¼ 0:3; z1ð0Þ ¼ 3:0; x2ð0Þ ¼ 0:35; y2ð0Þ ¼ 0:3; z2ð0Þ ¼ 3:0
and a = 0.5 are shown in Fig. 1. It converges to 1 rapidly with evolution of the time. Thus the chaotic synchronizationof system (8) and (9) is achieved. The synchronized state is asymptotically stable in the case of 2a = 1. Fig. 2 shows theplot of the maximum Lyapunov exponent with various values of c = 2a for determining the stability of synchronizedstate. The maximum Lyapunov exponents are negative when c 2 [0.53,1.22], therefore the synchronized state is stable.While c is taken as other values except the region [0.53,1.22], the maximum Lyapunov exponents are all positive, thereis not any region of stability for synchronized states. We see that there is a region of stability close to c = 1, in which twoHR neurons nonlinearly coupled can synchronize completely. Therefore c = 1 can be considered as a reference value ofstability coupling strength. There will be a region of stability of coupling strength around it. It is important to know thisregion for the choice of coupling strength.
0 2 4 6 8 10
0.2
0.4
0.6
0.8
1
1.2
Fig. 1. Time history of synchronized state x2/x1.

Fig. 2. Maximum Lyapunov exponent kmax vs c.
H. Yu, J. Peng / Chaos, Solitons and Fractals 29 (2006) 342–348 345
3. Chaotic synchronization of HR neural networks
We now consider a network of coupled nonlinearly by N Hindmarsh–Rose neurons as follows:
_X iðtÞ ¼ AX iðtÞ �DðX iðtÞÞ þ aXNj
GijDðX jðtÞÞ; i ¼ 1; 2; . . . ;N ð11Þ
where a is the coupling strength. G is the matrix of coupling coefficients {Gij} and the sumPN
j Gij ¼ 0. Suitable choice ofG will provide the connectivity of HR neurons each other. D(X) is nonlinear coupling function mentioned before. Theconnective matrix of G for star coupling are given as
G3 ¼
N � 1 �1 �1 � � � �1
�1 1 0 � � � 0
�1 0 1 � � � 0
..
. ... ..
. ... ..
.
�1 0 � � � 0 1
0BBBBBB@
1CCCCCCA
ð12Þ
Let e1 = X1 � X2, ei = Xi � Xi+1, i = 2,3, . . . ,N � 1. The coupling strength is set as astar at first HR neuron equation,the others are set as bstar. The evolutional equations of difference between ith neuron and its neighbor i + 1th neuroncan be written via the linear approximation as
_eiðtÞ ¼ Aþ ðbstar � 1Þ oDoX
� �ei; i ¼ 2; 3; . . . ;N � 1 ð13Þ
Here we see that when bstar = 1, the difference equation (13) are asymptotically stable for synchronized states, satisfyingX2 = X3 = � � � = XN. Thereby we get the evolutional equations of synchronized difference between the first neuron andthe second neuron
_e1ðtÞ ¼ Aþ ððN � 1Þastar þ bstar � 1Þ oDoX
� �e1 ð14Þ
Eq. (14) is asymptotically stable when bstar = 1 and astar = 0.0. We see that it is necessary to satisfy bstar = 1 and astar =0.0, if all of the neurons in the HR neural network can achieve synchronization in the case of star coupling. Besides wenotice that evolutional equations (13) are the same for all the synchronized errors ei corresponding to star coupling.Thus it simplifies greatly our calculation. As astar = 0.0, it is a network through one-way coupling.
In fact, evolutional equations (13) have simple form. Given a coupling strength bstar, we can calculate the maximumLyapunov exponents to determine the stability of synchronized state. While the coupling strength bstar = 1, the stabilitycan be examined on the basis of the stability criterion of linear systems, and it is not necessary to calculate the maximumLyapunov exponents.
Comparing Eq. (14) with (6), we find that there is a relationship between them, which is astar = (2a � 1)/(N � 1) asbstar = 1 for the same Lyapunov exponent. Fig. 3 shows the plot of stability region astar 2 [�0.054,0.024] of 10 star cou-pling neurons represented by maximum Lyapunov exponents as bstar = 1. Knowing this is very important; we can ex-pect the region of stability of numerous coupled neurons only from estimating the region of stability of two coupling
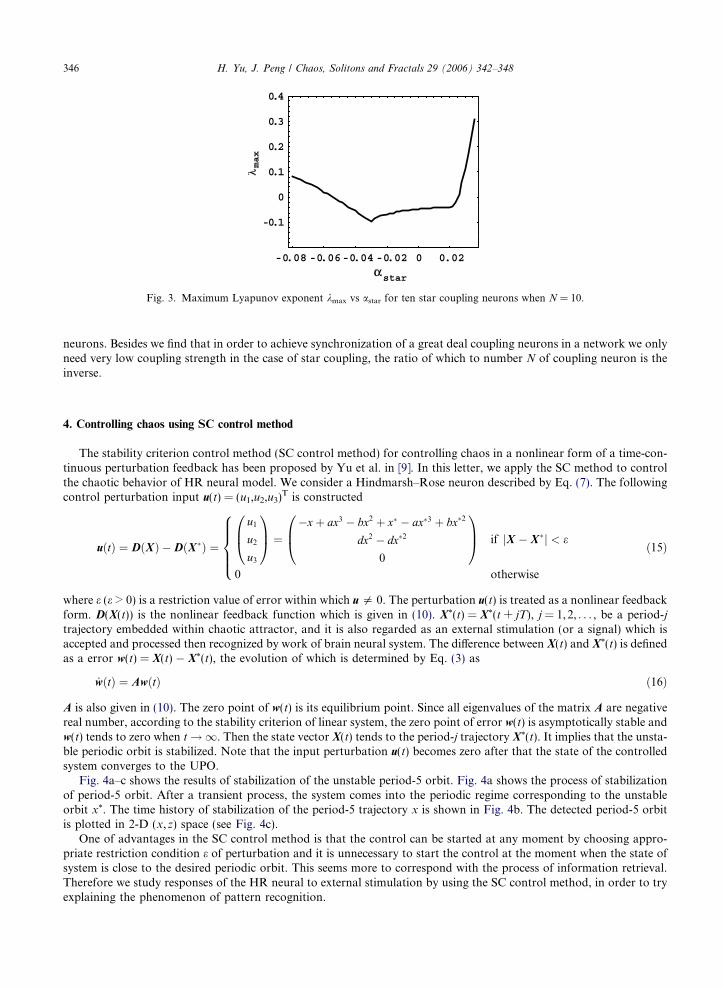
Fig. 3. Maximum Lyapunov exponent kmax vs astar for ten star coupling neurons when N = 10.
346 H. Yu, J. Peng / Chaos, Solitons and Fractals 29 (2006) 342–348
neurons. Besides we find that in order to achieve synchronization of a great deal coupling neurons in a network we onlyneed very low coupling strength in the case of star coupling, the ratio of which to number N of coupling neuron is theinverse.
4. Controlling chaos using SC control method
The stability criterion control method (SC control method) for controlling chaos in a nonlinear form of a time-con-tinuous perturbation feedback has been proposed by Yu et al. in [9]. In this letter, we apply the SC method to controlthe chaotic behavior of HR neural model. We consider a Hindmarsh–Rose neuron described by Eq. (7). The followingcontrol perturbation input u(t) = (u1,u2,u3)
T is constructed
uðtÞ ¼ DðXÞ �DðX�Þ ¼
u1u2u3
0B@
1CA ¼
�xþ ax3 � bx2 þ x� � ax�3 þ bx�2
dx2 � dx�2
0
0B@
1CA if jX � X�j < e
0 otherwise
8>>><>>>:
ð15Þ
where e (e > 0) is a restriction value of error within which u5 0. The perturbation u(t) is treated as a nonlinear feedbackform. D(X(t)) is the nonlinear feedback function which is given in (10). X*(t) = X*(t + jT), j = 1,2, . . . , be a period-jtrajectory embedded within chaotic attractor, and it is also regarded as an external stimulation (or a signal) which isaccepted and processed then recognized by work of brain neural system. The difference between X(t) and X*(t) is definedas a error w(t) = X(t) � X*(t), the evolution of which is determined by Eq. (3) as
_wðtÞ ¼ AwðtÞ ð16Þ
A is also given in (10). The zero point of w(t) is its equilibrium point. Since all eigenvalues of the matrix A are negativereal number, according to the stability criterion of linear system, the zero point of error w(t) is asymptotically stable andw(t) tends to zero when t! 1. Then the state vector X(t) tends to the period-j trajectory X*(t). It implies that the unsta-ble periodic orbit is stabilized. Note that the input perturbation u(t) becomes zero after that the state of the controlledsystem converges to the UPO.
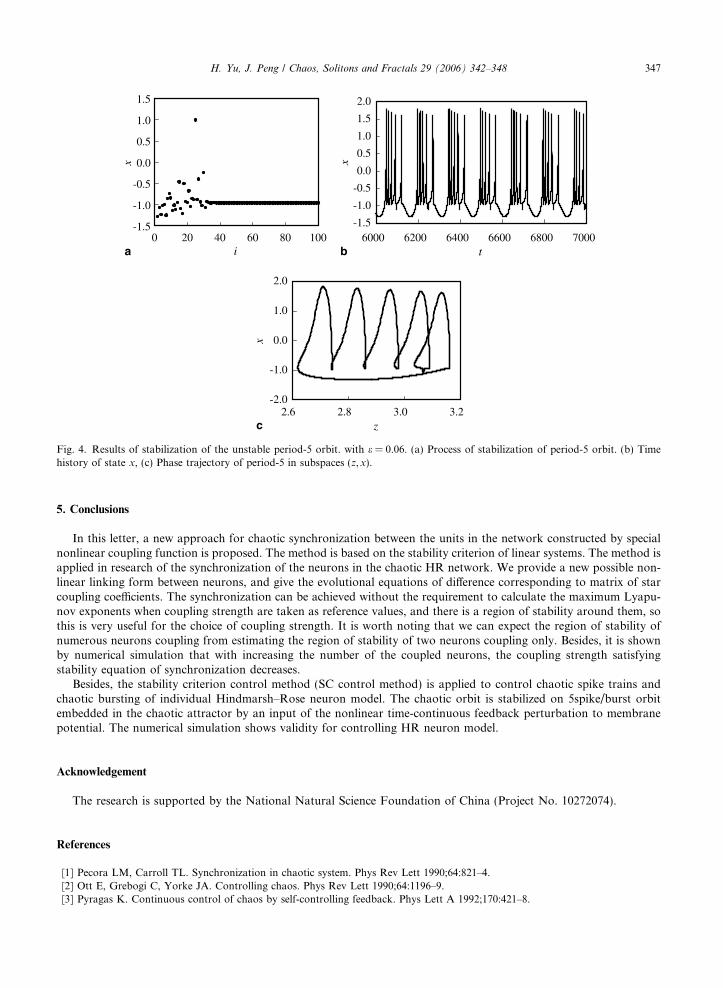
Fig. 4a–c shows the results of stabilization of the unstable period-5 orbit. Fig. 4a shows the process of stabilizationof period-5 orbit. After a transient process, the system comes into the periodic regime corresponding to the unstableorbit x*. The time history of stabilization of the period-5 trajectory x is shown in Fig. 4b. The detected period-5 orbitis plotted in 2-D (x,z) space (see Fig. 4c).
One of advantages in the SC control method is that the control can be started at any moment by choosing appro-priate restriction condition e of perturbation and it is unnecessary to start the control at the moment when the state ofsystem is close to the desired periodic orbit. This seems more to correspond with the process of information retrieval.Therefore we study responses of the HR neural to external stimulation by using the SC control method, in order to tryexplaining the phenomenon of pattern recognition.
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
0 20 40 60 80 100i
x
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
6000 6200 6400 6600 6800 7000 t
x
-2.0
-1.0
0.0
1.0
2.0
2.6 2.8 3.0 3.2 z
xa b
c
Fig. 4. Results of stabilization of the unstable period-5 orbit. with e = 0.06. (a) Process of stabilization of period-5 orbit. (b) Timehistory of state x, (c) Phase trajectory of period-5 in subspaces (z,x).
H. Yu, J. Peng / Chaos, Solitons and Fractals 29 (2006) 342–348 347
5. Conclusions
In this letter, a new approach for chaotic synchronization between the units in the network constructed by specialnonlinear coupling function is proposed. The method is based on the stability criterion of linear systems. The method isapplied in research of the synchronization of the neurons in the chaotic HR network. We provide a new possible non-linear linking form between neurons, and give the evolutional equations of difference corresponding to matrix of starcoupling coefficients. The synchronization can be achieved without the requirement to calculate the maximum Lyapu-nov exponents when coupling strength are taken as reference values, and there is a region of stability around them, sothis is very useful for the choice of coupling strength. It is worth noting that we can expect the region of stability ofnumerous neurons coupling from estimating the region of stability of two neurons coupling only. Besides, it is shownby numerical simulation that with increasing the number of the coupled neurons, the coupling strength satisfyingstability equation of synchronization decreases.
Besides, the stability criterion control method (SC control method) is applied to control chaotic spike trains andchaotic bursting of individual Hindmarsh–Rose neuron model. The chaotic orbit is stabilized on 5spike/burst orbitembedded in the chaotic attractor by an input of the nonlinear time-continuous feedback perturbation to membranepotential. The numerical simulation shows validity for controlling HR neuron model.
Acknowledgement
The research is supported by the National Natural Science Foundation of China (Project No. 10272074).
References
[1] Pecora LM, Carroll TL. Synchronization in chaotic system. Phys Rev Lett 1990;64:821–4.[2] Ott E, Grebogi C, Yorke JA. Controlling chaos. Phys Rev Lett 1990;64:1196–9.[3] Pyragas K. Continuous control of chaos by self-controlling feedback. Phys Lett A 1992;170:421–8.
348 H. Yu, J. Peng / Chaos, Solitons and Fractals 29 (2006) 342–348
[4] Atlee Jackson E, Grosu I. An open-plus-closed-loop (OPCL) control of complex dynamic systems. Physica D 1995;85:1–9.[5] Pecora LM, Carroll TL. Master stability functions for synchronized coupled systems. Phys Rev Lett 1998;80:2109–12.[6] Shuai JW, Durand DM. Phase synchronization in two coupled chaotic neurons. Phys Lett A 1999;264:289–97.[7] Yu HJ, Liu YZ, Peng JH. Control of chaotic neural networks based on contraction mappings. Chaos, Solitons & Fractals
2004;22:787–92.[8] Yu HJ, Liu YZ. Chaotic synchronization based on stability criterion. Phys Lett A 2003;314:292–8.[9] Yu HJ, Liu YZ, Peng JH. Continuous control of chaos based stability criterion. Phys Rev E 2004;69:066203-1–3-8.[10] Hrshu JF, Carroll TL, Pecora LM. Synchronous chaos in coupled oscillator systems. Phys Rev E 1994;50:1874–85.[11] Gauthier DJ, Bienfang JC. Intermittent loss of synchronization in coupled chaotic oscillators: toward a new criterion for high-
quality synchronization. Phys Rev Lett 1996;77:1751–4.[12] Garfinkel A, Spano ML, Ditto WL, Weiss J. Controlling cardiac chaos. Science 1997;257:1230–5.[13] Schiff SJ, Jerger K, et al. Controlling chaos in the brain. Nature 1994;370:615–20.[14] Schafer C, Rosenblum MG, et al. Synchronization in the human cardiorespiratory system. Phys Rev E 1999;60:857–70.[15] Lian J, Shuai J, Durand DM. Control of phase synchronization of neuronal activity in the rat hippocampus. J Neural Eng
2004;1:46–54.[16] Wang W, Perez G, Cerdeira HA. Dynamical behavior of the firings in a coupled neuronal system. Phys Rev E 1993;47:2893–8.[17] Crook N, Scheper T, Pathirana V. Self-organised dynamic recognition states for chaotic neural networks. Inform Sci
2003;150:59–75.[18] Sabbagh H. Control of chaotic solutions of the Hindmarsh–Rose equations. Chaos, Solitons & Fractals 2000;11:1213–8.[19] Rosa ML, Rabinovich MI, Huerta R, et al. Slow regularization through chaotic oscillation transfer in an unidirectional chain of
Hindmarsh–Rose models. Phys Lett A 2000;266:88–93.[20] Dhamala M, Jirsa VK, Ding M. Enhancement of neural synchrony by time delay. Phys Rev Lett 2004;92:074104-1–4-4.[21] Ali MK, Fang JQ. Synchronization of chaos and hyperchaos using linear and nonlinear feedback functions. Phys Rev E
1997;55:5285–90.