Challenges in Seafloor Imaging and Mapping with Synthetic Aperture Sonar
4
Challenges in Seafloor Imaging and Mapping with Synthetic Aperture Sonar Roy E Hansen, Hayden J Callow, Torstein O Sæbø and Stig A V Synnes Norwegian Defence Research Establishment (FFI) P O Box 25, NO-2027 Kjeller, Norway Abstract The success of synthetic aperture sonar (SAS) is critically dependent on overcoming several challenges. The sonar has to be positioned with accuracy better than a fraction of a wavelength along the synthetic aperture. The ocean environment, and particularly the sound velocity, has to be accurately estimated for successful focusing of SAS images. For non- straight synthetic apertures, the bathymetry of the scene to be imaged must be known. Kongsberg Maritime and FFI have developed the HISAS 1030 wideband widebeam interferometric SAS. This paper describes the system and show example results from data collected by a HUGIN 1000-MR autonomous underwater vehicle. 1 Introduction Synthetic aperture sonar (SAS) is less known and devel- oped than its counterpart in radar. Although the princi- ple of SAS is not new [1], it is only during latest years that SAS systems have become commercially available. The Norwegian Defence Research Establishment (FFI) and Kongsberg Maritime have a long term collaboration to develop SAS for the HUGIN autonomous underwater vehicle (AUV). Figure 1 shows a HUGIN 1000-MR AUV onboard a Royal Norwegian Navy mine hunter. There are a few critical differences between SAR and SAS – one in particular is the environment for which the sensor is oper- ating. This paper describes some of the specific challenges in SAS and how we approach them in imaging and map- ping of the seafloor from autonomous underwater vehicles (AUVs). Figure 1: HUGIN 1000-MR AUV onboard the Royal Nor- wegian Navy mine hunter Hinnøy. 2 System description Figure 2: The HISAS 1030 interferometric SAS. HISAS 1030 is a wideband widebeam interferometric SAS developed by Kongsberg Maritime and FFI [2]. The sonar contains two along-track receiver arrays of length 1.2 m with 32 elements in each array, and a vertical baseline of 20 wavelengths. The transmitter is a vertical phased ar- ray with reception capability. Figure 2 shows the sonar mounted on a HUGIN vehicle. Typical HISAS 1030 spec- ifications are summarized in Table 1. Center frequency [kHz] 100 Wavelength [cm] 1.5 Typical bandwidth [kHz] 30 Total frequency range [kHz] 50-120 Along-track resolution [cm] 3 Cross-track resolution [cm] 3 Maximum range @ 2 m/s [m] 200 Area coverage rate km 2 /h 2 Table 1: Typical system specifications.
Challenges in Seafloor Imaging and Mapping with Synthetic Aperture Sonar
Challenges in Seafloor Imaging and Mapping with Synthetic Aperture
Sonar Roy E Hansen, Hayden J Callow, Torstein O Sæbø and Stig A V
Synnes Norwegian Defence Research Establishment (FFI) P O Box 25,
NO-2027 Kjeller, Norway
Abstract
The success of synthetic aperture sonar (SAS) is critically
dependent on overcoming several challenges. The sonar has to be
positioned with accuracy better than a fraction of a wavelength
along the synthetic aperture. The ocean environment, and
particularly the sound velocity, has to be accurately estimated for
successful focusing of SAS images. For non- straight synthetic
apertures, the bathymetry of the scene to be imaged must be known.
Kongsberg Maritime and FFI have developed the HISAS 1030 wideband
widebeam interferometric SAS. This paper describes the system and
show example results from data collected by a HUGIN 1000-MR
autonomous underwater vehicle.
1 Introduction Synthetic aperture sonar (SAS) is less known and
devel- oped than its counterpart in radar. Although the princi- ple
of SAS is not new [1], it is only during latest years that SAS
systems have become commercially available. The Norwegian Defence
Research Establishment (FFI) and Kongsberg Maritime have a long
term collaboration to develop SAS for the HUGIN autonomous
underwater vehicle (AUV). Figure 1 shows a HUGIN 1000-MR AUV
onboard a Royal Norwegian Navy mine hunter. There are a few
critical differences between SAR and SAS – one in particular is the
environment for which the sensor is oper- ating. This paper
describes some of the specific challenges in SAS and how we
approach them in imaging and map- ping of the seafloor from
autonomous underwater vehicles (AUVs).
Figure 1: HUGIN 1000-MR AUV onboard the Royal Nor- wegian Navy mine
hunter Hinnøy.
2 System description
Figure 2: The HISAS 1030 interferometric SAS.
HISAS 1030 is a wideband widebeam interferometric SAS developed by
Kongsberg Maritime and FFI [2]. The sonar contains two along-track
receiver arrays of length 1.2 m with 32 elements in each array, and
a vertical baseline of 20 wavelengths. The transmitter is a
vertical phased ar- ray with reception capability. Figure 2 shows
the sonar mounted on a HUGIN vehicle. Typical HISAS 1030 spec-
ifications are summarized in Table 1.
Center frequency [kHz] 100 Wavelength [cm] 1.5 Typical bandwidth
[kHz] 30 Total frequency range [kHz] 50-120 Along-track resolution
[cm] 3 Cross-track resolution [cm] 3 Maximum range @ 2 m/s [m] 200
Area coverage rate km2/h 2
Table 1: Typical system specifications.
sas
EUSAR 2010
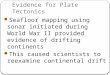
Figure 3 shows an example image that captures the essence of SAS
and illustrates the performance of HISAS 1030.
Figure 3: Example image that illustrates the performance of HISAS
1030. The range is 25–325 m (left to right) and the water depth
180–200 m. Top inset: A 40×20 m cutout around the wreck of the
German WW2 submarine U-735, centred at 225 m range. Bottom insets:
Cutout around 1×1 m concrete cubes, centred at 275 m range (left)
and 320 m range (right). Theoretical resolution in the image is 3 ×
3 cm.
3 Differences between SAR and SAS
The principle for synthetic aperture imaging is the same in radar
and sonar. There are, however, some rather impor- tant differences
between SAR and SAS. These differences are related to the ocean
environment and the differences in phase velocity.
3.1 Frequency Seawater is a dissipative medium through viscosity
and chemical processes [3]. Acoustic absorption in seawater is
frequency dependent, such that the travelling distance measured in
wavelengths has a fixed absorption loss (see Table 2). This gives
an upper limit on the frequency for any given range. This will,
inherently, limit the cross-range resolution for real aperture
sonars, such as sidescan sonar and multibeam echosounders
[3].
f [kHz] R [km] λ [m] 0.1 1000 15 1 100 1.5 10 10 0.15 100 1 0.015
1000 0.1 0.0015
Table 2: Approximate range R for frequency f and corre- sponding
wavelength λ.
3.2 Along-track sampling The most significant difference between
SAR and SAS is the phase velocity, which typically is cr = 3× 108
m/s for radio waves in air, and ca = 1.5 × 103 m/s for acoustic
waves in seawater. The low phase velocity causes a fun- damental
problem in obeying the sampling criterion along the synthetic
array. Using a multi-element receiver array is a simple way to
overcome this problem [1, 4], and almost all existing SAS systems
today are designed with multi- element receivers. The distance
travelled between pulses can maximally be half the lenghth of the
receiver array [4]. This gives a maximum range of
Rmax = cL
4αv
where c is the sound velocity, L is the physical receiver array
length, v is the vehicle speed, and α is an over- lap factor ≥ 1
controlling the relative redundancy in the synthetic aperture. This
redundancy is used for micron- avigation (see section 4.1). As an
example, the HISAS 1030 has L = 1.2 m. This gives a maximum range
of Rmax = 203 m at vehicle speed v = 2 m/s and overlap factor α =
32/29.
3.3 Imaging geometry A typical SAS imaging geometry is illustrated
in Figure 4. Two sonars are mounted on the vehicle, one on port
side and one on starboard. The vehicle runs rather low over the
seafloor, and the sonar range is typically 10 times the vehi- cle
altitude. Beneath the vehicle, there is a blind zone or a gap with
a width approximately two times the altitude. The imaging geometry
is thereby rather horizontal with recep- tion of data from 45 to 5
grazing angle. The SAS system works solely in strip-map mode, and
the swath width is al- most equal to the maximum range. Shadowing
is a more
important effect than foreshortening and layover compared to
satellite borne SAR.
Figure 4: AUV based SAS imaging geometry
4 Challenges in SAS The success of synthetic aperture sonar (SAS)
is critically dependent on overcoming several challenges [5, 6]. In
this section, we list some of the important factors to consider to
be able to perform robust and reliable SAS.
4.1 Navigation Navigation of autonomous underwater vehicles has
differ- ent challenges than e.g. airborne platforms since GPS is
not available. The HUGIN AUV is equipped with a high grade aided
inertial navigation system (INS). In SAS, the sonar has to be
positioned with accuracy better than a frac- tion of a wavelength
along the entire synthetic aperture. At 100 kHz this equals an
accuracy requirement around 1 mil- limetre along tens of metres of
travelled distance. This re- quirement is generally not met even by
the most advanced aided INSes available for AUVs. We solve this by
integrat- ing micronavigation on sensor data with the inertial
navi- gation [7]. The micronavigation is based on the principle of
displaced phase centre antenna (DPCA) [8]. In radar, DPCA is mostly
used for clutter supression in ground mov- ing target indication
(GMTI) radar. We use DPCA to esti- mate platform motion (similar to
shear averaging in SAR).
4.2 Sound velocity errors The sound velocity in the ocean varies
with depth [3]. In coastal waters, there might also be local
horizontal and temporal variations. These variations can cause
variation in the sound velocity up to 2% along the acoustic path.
SAS is near-field acoustic imaging, which requires that the
geometry and the sound velocity between observation sys- tem
(sonar) and scene (seafloor) to be known. An incor- rect sound
velocity leads to defocusing and reduced image quality [9]. We
approach the problem of estimating sound velocity in several ways.
First, the vehicle carries a high quality Con- ductivity,
Temperature, Depth (CTD) sensor from which the in-situ sound
velocity is calculated [3]. All the CTD data are used to create the
best possible CTD map for the SAS processing. For residual errors
in the sound velocity causing defocusing in the SAS imagery, we
have devel- oped a blind image correction technique that both
corrects
the image and estimates the error in the average sound ve- locity
[9]. This technique is based on phase gradient auto- focusing
[10].
4.3 Bathymetry
Figure 5: Vehicle track and seafloor depth for a particular HUGIN
AUV mission in Norwegian waters.
For non-straight synthetic apertures, the topography (or
bathymetry) of the scene to be imaged has to be known [10]. This is
critical for robust autonomous underwater ve- hicle (AUV) based SAS
in areas with rough terrain. Fig- ure 5 shows the vehicle depth and
seafloor depth for a par- ticular HUGIN AUV track in rough terrain.
The two indi- cated sections are time slots for data collection for
different SAS imaging blocks. The vertical motion is clearly non-
straight, and the topography has to be estimated. We ap- proach
this by applying real aperture interferometric map- ping of the
swath as part of the preprocessing before syn- thetic aperture
imaging [6].
4.4 Shallow waters
Figure 6: Interferometric SAS in shallow waters
A fundamental challenge in high resolution imaging of the seafloor
is surveying in shallow waters, where the presence of the sea
surface affects the imaging quality. This applies both to real
aperture sonar (also known as sidescan sonar [3]), and SAS. Figure
6 shows the basic geometry for di- rect signals and multipath (or
clutter) signals that has been reflected one or more times in the
surface. Multipath will affect SAS threefold: 1) the image signal
to clutter ratio will be lower; 2) the spatial coherence between
the upper and the lower receiver array will decrease [11]; 3) the
tem- poral coherence between pings (used in the principle of DPCA
[8]) will be lower. This is strongly dependent on the ocean
environment.
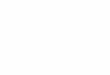
Figure 7: The effect of multipath in shallow waters. The range
(x-axis) is 150 m and the water depth is only 9 m.
Figure 7 shows two SAS images of the same area of the seafloor,
taken one week apart. The wind speed was rela- tively high during
the data collection for the upper image, while during the data
catch for the lower image, the sea was calm. This caused sufficient
difference in sea surface roughness, to change the multipath
contribution. We use the spatial coherence from the real aperture
interferometer to calculate an equivalent signal to clutter ratio
[12, 11]. The red curve in the lower image indicates the range for
which the coherence is 0.66. We use this to mark the valid range in
shallow water operations.
5 Summary
There are significant differences between SAR and SAS, all related
to the ocean environment. HISAS 1030 is a wideband widebeam
interferometric SAS developed by Kongsberg Maritime and FFI. In
this paper, we have listed some of the specific challenges that has
to be solved to ob- tain robustness and high performance. These
actions affect both the design of the sonar, the signal processing
of the sonar data and the control of the platform. We combine sonar
micronavigation with aided inertial navigation to ob- tain
sufficient navigation accuracy. We map the terrain us- ing real
aperture interferometry as part of the SAS process- ing such that
reliable imagery can be performed in rough terrain. We estimate
sound velocity errors and correct for it in the SAS images. In
shallow waters, we estimate the range for validity by inspecting
the spatial coherence func- tion.
References [1] L. J. Cutrona. Comparison of sonar system per-
formance achievable using synthetic-aperture tech- niques with the
performance achievable by more con- ventional means. J. Acoust.
Soc. Am., 58(2):336–348, 1975.
[2] P. E. Hagen, T. G. Fossum, and R. E. Hansen. HISAS 1030: The
next generation mine hunting sonar for AUVs. In UDT Pacific 2008
Conference Proceed- ings, Sydney, Australia, November 2008.
[3] X. Lurton. An Introduction to Underwater Acous- tics:
Principles and Applications. Springer Praxis Publishing,
2002.
[4] M. P. Bruce. A processing requirement and resolution capability
comparison of side-scan and synthetic- aperture sonars. IEEE J.
Oceanic Eng., 17(1):106– 117, 1992.
[5] P. E. Hagen and R. E. Hansen. Synthetic aperture sonar
challenges ... and how to meet them. Hydro International, pages
26–31, may 2008.
[6] R. E. Hansen, H. J. Callow, T. O. Sæbø, S. A. Synnes, P. E.
Hagen, T. G. Fossum, and B. Langli. Synthetic aperture sonar in
challenging environments: Results from the HISAS 1030. In
Proceedings of Underwa- ter Acoustic Measurements 2009, Nafplion,
Greece, June 2009.
[7] R. E. Hansen, T. O. Sæbø, K. Gade, and S. Chap- man. Signal
processing for AUV based interfer- ometric synthetic aperture
sonar. In Proceedings of Oceans 2003 MTS/IEEE, pages 2438–2444, San
Diego, CA, USA, September 2003.
[8] A. Bellettini and M. A. Pinto. Theoretical accuracy of
synthetic aperture sonar micronavigation using a dis- placed
phase-center antenna. IEEE J. Oceanic Eng., 27(4):780–789,
2002.
[9] R. E. Hansen, H. J. Callow, and T. O. Sæbø. The effect of sound
velocity variations on synthetic aper- ture sonar. In Proceedings
of Underwater Acoustic Measurements 2007, Crete, Greece, June
2007.
[10] J. C. V. Jakowatz, D. E. Wahl, P. H. Eichel, D. C. Ghiglia,
and P. A. Thompson. Spotlight-Mode Syn- thetic Aperture Radar: A
Signal Processing Ap- proach. Kluwer Academic Publishers,
1996.
[11] S. A. Synnes, R. E. Hansen, and T. O. Sæbø. Assess- ment of
shallow water performance using interfero- metric sonar coherence.
In Proceedings of Underwa- ter Acoustic Measurements 2009,
Nafplion, Greece, June 2009.