Embed Size (px)
DESCRIPTION
MAV development
Citation preview

JOURNAL OF AIRCRAFT
Vol. 43, No. 2, March–April 2006
Challenges Facing Future Micro-Air-Vehicle Development
Darryll J. Pines and Felipe BohorquezUniversity of Maryland, College Park, Maryland 20742
NomenclatureAr = rotor disk areaCD = sectional drag coefficientCD0 = zero-lift drag coefficientClα = lift-curve slopeCP = power coefficientCPi = induced power coefficientCP0 = profile power coefficientCT = thrust coefficientc = chord lengthD = drag forceD.L . = disk loadingL = lift forcem = massP.L . = power loadingSF = separated flowT = rotor thrustV = local wind velocity perceived by flapW = weightW f = final weightWo = gross takeoff weightα = blade section angle of attackη = efficiencyμ = dynamic viscosityρ = air densityσ = rotor solidity� = flapping amplitude (peak to peak)
I. Introduction
O NE-HUNDRED years after the Wright Brother’s first poweredhistoric flight at Kitty Hawk, North Carolina, on 17 December
1903, aerospace engineers still face challenges in understanding andharnessing the physics of flight. Whereas the 20th century usheredin the era of manned atmospheric and spaceflight, it is likely that the21st century will be characterized by the emergence of autonomouscomputer-controlled uninhabited flight. Driven by a host of civilian,homeland security, and military objectives, uninhabited air vehicles(UAVs) have emerged as the platform of choice for warfightersconducting survelliance and reconnaissance operations in hostileenvironments.
Because of their relatively low cost and propensity for provid-ing accurate survelliance information, numerous UAV development
Dr. Pines is a Professor at the University of Maryland in the Department of Aerospace Engineering. He is currently on leave at the DARPA inthe Defense Sciences Office. Dr. Pines research interests include smart structures, structural health monitoring and micro and nano air vehicle flightphysics. He is a fellow of IOP and an associate fellow of AIAA. He is also a member of ASME and AHS.
Felipe Bohorquez is doctoral student at the University of Maryland working on micro air vehicle research. He is a student member of AIAA andthe American Helicopter Society.
Received 2 September 2003; revision received 28 February 2005; accepted for publication 28 February 2005. Copyright c© 2005 by the American Institute ofAeronautics and Astronautics, Inc. All rights reserved. Copies of this paper may be made for personal or internal use, on condition that the copier pay the $10.00per-copy fee to the Copyright Clearance Center, Inc., 222 Rosewood Drive, Danvers, MA 01923; include the code 0021-8669/06 $10.00 in correspondencewith the CCC.
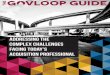
programs have been initiated worldwide.1,2 As indicated in Fig. 1,typical UAVs have wing spans greater than 1 m and gross takeoffweights (GTOW) greater than 5 kg. However, in the past decade anew class of UAV has emerged, which is at least an order of magni-tude smaller in length and two orders of magnitude lighter in weightthan previously developed aircraft. This new class of UAV is calleda micro air vehicle (MAV) or sometimes referred to as a μUAV.These vehicles have been defined to have no length dimensiongreater than 6 in. with gross takeoff weights of approximately 200 gor less.
As a new class of air vehicle, these systems face many uniquechallenges that make their design and development difficult. Forexample, micro air vehicles operate in a very sensitive Reynolds-number regime. In this regime, many complex flow phenomena takeplace within the boundary layer. Separation, transition, and reat-tachment can all occur within a short distance along the chordlineof a wing or rotor and can dramatically affect the performance ofthe lifting surface. Hence, designing vehicles that can efficientlyfly in this flight regime represents an entirely new challenge toaerospace design engineers. In fact because of the lack of knowl-edge about the fundamental flow physics in this regime, the de-velopment of small-scale flying vehicles parallels the developmentof the practical powered aircraft developed by the Wright Brothersin 1903. After the initial development of the Wright Flyer, engi-neers and scientists struggled to develop analytical tools as wellas gather enough experimental wind-tunnel and flight-test data tohelp develop better design tools that would improve the perfor-mance of fixed-wing aircraft. A similar trend is evolving in thedevelopment of small-scale mechanical flying machines. There arefew if any analysis tools to help MAV designers accurately modelthe steady and unsteady environment that MAVs encounter while inflight.
Fortunately, the development of larger-scale UAVs over the past30 years provides some insight and guidance into the anticipatedperformance of microscale fixed-wing and rotary-wing MAV de-signs. For instance, using data from previously developed UAVs, it ispossible to extrapolate performance parameters such as endurance,wing span, payload mass, and range to much smaller scale lengths.Figure 2 illustrates such scaling trends for UAV payload weightand endurance vs GTOW. Surprisingly, over a broad range of UAVGTOW, the payload mass scales linearly on a log-log scale. Ex-tending this linear scaling trend to a micro air vehicle with aweight of approximately 100 g provides a first guess of the po-tential payload weights for a small-scale fixed-wing mechanical
290
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

PINES AND BOHORQUEZ 291
Fig. 1 Scale of uninhabited air vehicles.2
Fig. 2 UAV GTOW and payload weight vs wing span.
flyer. This scaling suggests an approximate payload weight of10 g. Similarly, extending the linear curve fit for enduranceprovides some insight into expectations for the endurance ofsmall-scale length fixed-wing UAVs. Fixed-wing UAV endurancedata have a much greater scatter as efficiencies in propulsionand aerodynamics become more uncertain as size and weightdecrease.
Although these scaling trends offer some insight into expectedperformance, data and design tools for small-scale aircraft [Wingspans <6 in. (15.24 cm)] are sparse. But aerospace scientists andengineers are not at a complete loss because nature has produced nu-merous biological flying machines that have evolved over millionsof years to efficiently fly in the low-Reynolds-number regime (seethe “Great Flight Diagram” in Fig. 3). However, achieving or ex-ceeding the efficiency, maneuverability, and autonomous operation
found in nature will be quite a challenge. This paper attempts to re-view the status in the development of this new class of air vehicle anddiscusses some emerging trends in technology that can lead to moreefficient small-scale flying machines. In the next section the perfor-mance of fixed-wing and rotary-wing MAVs is reviewed. Section IIIdiscusses the three fundamental technical barriers that limit the per-formance of many of the MAVs discussed in Sec. II. Finally, Sec. IVdiscusses some emerging research trends that can improve the de-velopment of the next generation of autonomous small-scale flyingmachines.
II. Status of and Performance of Current MAVsA. Evolution of Micro-Air-Vehicle Development
In the United States, the development of MAVs has been spear-headed by the Department of Defense’s (DoD) need to developautonomous, lightweight, small-scale flying machines that areappropriate for a variety of missions including reconnaissanceover land, in buildings and tunnels, and other confined spaces.Of particular interest is the ability of these vehicles to oper-ate in the urban environment4−7 and perch on buildings to pro-vide situational awareness to the warfighter. Following DoD’slead,∗ numerous national and international government agen-cies have initiated activities to develop small autonomous flyingvehicles.
To establish guidelines for vehicle designs, an urban missionwas assumed, and a set of baseline requirements was developed.These vehicle and mission performance requirements are summa-rized in Table 1. In addition to the requirements listed in this table,vehicles had to be compact, efficient, and simple to designand operate. To better understand these challenges, the nextsection attempts to compare the performance of various inte-grated micro-air-vehicle designs flying under their own powerthat have been developed under government-sponsored researchprograms.
∗Data available online at http://www.aero.ufl.edu/∼issmo/mav/info.htm.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

292 PINES AND BOHORQUEZ
Fig. 3 Great Flight diagram.
Table 1 MAV design requirements
Specification Requirements Details
Size <15.24 cm Maximum dimensionWeight ∼100 g Objective GTOWRange 1 to 10 km Operational rangeEndurance 60 min Loiter time on stationAltitude <150 m Operational ceilingSpeed 15 m/s Maximum flight speedPayload 20 g Mission dependentCost $1500 Maximum cost
B. Performance of Micro-Air-Vehicle DesignsTable 2 summarizes some of the size, weight, and performance pa-
rameters of recent MAV designs flying under their own power (i.e.,no tethered power). Data appearing in this table have been eitherestimated by the author or has been obtained from the literature.8−15
A glance at this table reveals that the majority of current fixed-wingand rotary-wing designs rely on battery power for energy, conven-tional airfoil shapes for achieving lift, and propellers or rotors forachieving thrust. All, with the exception of Microbat, rely on conven-
tional steady-state aerodynamic principles for generating thrust andlift. Similar to small insects and birds, CalTech/Aerovironment’sMicrobat uses flapping of its wings via an electric motor to gen-erate thrust and lift, suggesting possibly a new paradigm shift inthe design and development of future micro air vehicles. However,before we discuss this paradigm shift it is instructive to comparethe performance of current MAV designs to their full-scale coun-terparts. Metrics of interest include fixed-wing vehicle endurance,vertical-takeoff-and-landing (VTOL) hover performance, and vehi-cle subsystem mass fractions.
1. Fixed-Wing Endurance PerformanceThe endurance for steady cruising flight of fixed-wing MAV de-
signs powered by an internal combustion engine is given by
E = (η/c f )(C
32L
/CD
)√2ρ∞S
(1/√
W f − 1/√
W o
)(1)
where S is the wing surface area, η is the propeller efficiency, c f isspecific fuel consumption, and CL and CD are the vehicle’s lift anddrag coefficients, respectively. Because the endurance of a vehicle isinversely proportional to the power required to maintain steady level
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

PINES AND BOHORQUEZ 293
Table 2 Design and performance parameters of some representative MAVs8−15
Black Widow Hoverfly LUMAV MicroStar Microbat MICORVehicle properties (Aerovironment) (Aerovironment) (Auburn Univ.) (Lockheed-Martin) (CalTech) (UMD)
GTOW, g 80 180 440 110 10.5 103Cruise speed, m/s 13.4 15–20 5 13.4–15.6 5 2Wing loading, N/m2 40.3 —— —— 70.9 40 ——Disk loading, N/m2 —— 70 185 —— —— 25Wing span or rotor 15.24 18 15.24 22.86 15.24 15.24diameter, cmMax L/D 6 N/Aa N/A 6 N/A 5Endurance, min 30 13.2 20 25 2 min 16 s 3Hover endurance N/A 7.3 N/A N/A N/A 3Power source Lithium-ion Lithium-ion 2-stroke Lithium-ion Sanyo NiCad Lithium-ion
batteries batteries IC engine batteries N-50 cells batteriesEnergy density, W-h/kg 140 140 5500 methanol 150 100 150Hover power, W N/A 24.5 70 N/A N/A 11Hover FM N/A 0.39 0.41 N/A N/A 0.55
aN/A = not available.
Fig. 4 Endurance or hover time of current MAVs.
flight, it is important to minimize the power required to increase theendurance. This suggests that from Eq. (1) one would like to havehigh wing loading, high lift coefficient, low drag coefficient, highpropeller efficiency, and fly as low as possible. Although it is difficultto find all of these parameters for existing fixed-wing MAV designs,it is still possible to compare the endurance performance based onmeasured flight times. Figure 4 displays the GTOW weight of vari-ous MAV designs vs endurance or maximum hover time. Althoughthese represent substantial progress in the field, the fact that nonehas been able to achieve true long-loiter times (>60 min) or effi-cient hovering flight is a testament to the difficulty of flying extendedmissions with small vehicles. Careful inspection of these vehicle de-signs reveals a variety of technical challenges for aerospace designengineers. For example, a detailed breakdown of the mass fractionsof three of these vehicles reveals a number of shortcomings whencompared to full-scale systems. Figure 5 displays the mass fractionsof three microflyers compared to a full-scale Boeing 767 commer-cial jetliner. Notice that for the small-scale flyers the mass fractionof the propulsion system (batteries/power and motor/transmission)
is in excess of 60% of the total vehicle mass. In contrast a jetlinerhas a propulsion/fuel system mass fraction of approximately 40%.It appears that this 20% savings at full scale is used entirely forpayload because the payload mass fraction is 29% for the 767 andjust 9% for the University of Maryland’s MICOR (Micro CoaxialRotorcraft) and CalTech/Aerovironment’s Microbat, respectively.Additionally, there is a wide variation in the mass fraction of thestructure required to support flight of the three small-scale vehiclescompared in Fig. 5.
2. Rotary-Wing/VTOL MAV Hover PerformanceIn the case of rotary-wing/VTOL designs, another metric of in-
terest is hover efficiency. Although the hover performance of moreconventional full-scale rotorcraft configurations is well documentedin the literature, the hover performance of micro “hovering” air vehi-cles in hover at low Reynolds numbers is relatively unknown.16,17,†
†Data available online at http://www.faulhaber.de.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

294 PINES AND BOHORQUEZ
Fig. 5 Mass fraction of MAVs compared against a Boeing 767.
Fig. 6 Rotary-wing MAV performance.
To compare the hover performance of various rotary-wing andVTOL MAV designs, it is important to examine the metric forcomparing hover efficiency. This is accomplished by comparingthe actual power required to hover with the ideal power required tohover.18 This leads to the rotor figure of Merit (FM) given by
FM = ideal power
actual power= T v
P(2)
where P is power supplied to the rotor and v is the rotor inducedvelocity. The larger the value of FM, the smaller the power re-quired to produce a given thrust, or the larger the thrust per unitpower. For an ideal rotor FM should equal 1. By rearrangingEq. (3), it is not difficult to derive the following equation relat-ing power loading to rotor disk loading from simple momentumtheory:
P.L . = 0.638(√
D.L ./
FM)
(3)
where P.L . (Power/Thrust) is power loading and D.L . (Thrust/DiskArea) is disk loading. This expression measures the aerodynamicand power efficiency of hovering vehicles.
Figure 6 plots P.L . vs D.L . for the three hovering MAV config-urations (Kolibri, Hoverfly, MICOR) listed in Table 2. Upper- andlower-bound limits are illustrated for figure-of-merit values of 0.40and 1.0. Those vehicle designs lying above the curve for a FM = 0.40require more power to stay aloft and are therefore less efficient thanother hovering designs. For the designs considered in this study,it appears that MICOR has the lowest power loading for a givendisk loading at this scale length. However, it is instructive to ex-amine the vehicle’s figure of merit vs various thrust coefficients.This is displayed in Fig. 7. Notice that in comparison to full-scalerotorcraft, MICOR’s 8% cambered airfoils achieve at best a FMvalue of 0.55 (Ref. 19). Full-scale rotors achieve FM values in therange from 0.65 to 0.85. In a full-scale rotor 30% of the poweris consumed by the profile losses and 70% by the induced losses.However, at low Reynolds numbers the profile power has a muchlarger influence over the total power required by the rotor. At high
Fig. 7 Figure of merit vsthrust coefficient.
thrust coefficients the contribution of profile power goes up to 45%.In addition, section lift-to-drag ratios for typical airfoil geome-tries tend to range from 2 to 8. Thus, scale size, airfoil design,thickness, and surface roughness appear to have a significant effecton the hover perform-ance of micro rotary wing designs. Hence,MAV designers are faced with significant challenges as length scaledecreases.
In terms of efficient MAV design, several technical questions re-main unanswered. For example, is it possible that MAV designerscan improve the overall efficiency and performance of MAVs? Arethere lessons to be learned by studying the efficiency of biolog-ical flyers? Unlike subsonic fixed-wing aircraft with their steady,almost inviscid flow dynamics, biological flyers such as insects andsmall birds fly in a sea of vortices when they flap their wings.These vortices can be used to keep MAVs aloft, especially inthe case of hovering flight. Recently, it has been demonstratedby computational-fluid-dynamics (CFD) analysis20 that bumble-bees flap their wings in a complex kinematic figure-eight pat-tern to generate lift and thrust. Similarly, hummingbirds are well-known masters of hovering flight by flapping their wings in excessof 20 Hz.
Closer examination of biological fliers reveals that existing MAVdesigns cannot match the aerodynamic performance (stability, ma-neuverability, and efficiency) of insects and small birds. This shouldcome as no surprise because design tools at this scale of flight arenot available. In addition, the underlying physics that are respon-sible for the achievements of nature’s great flyers is still not wellunderstood. For example, how an insect can take off backwards, flysideways, and land upside down21 cannot be explained using con-ventional aerodynamic theory. It appears that insect wings producelift more efficiently than one would expect based on conventionalsteady-state aerodynamic theory.22−25
III. Fundamental Physics Limiting MAV PerformanceOne of the greatest challenges for researchers is determining how
insects and small birds can generate forces that can range from 2to 12 times their body weight. Conventional steady-state aerody-namic theory is unable to explain this phenomenon. Thus, some-thing about the complexity of the wing pitching/plunging/laggingmotion increases the lift produced by a wing above and beyond thatwhich it could generate under steady flow conditions or that canbe predicted by conventional steady-state aerodynamic theory. Thereasons for this remain research topics, but some conclusions areemerging. Recent work by experimental biologists indicates thatthe pitching/plunging motion of the insect wing can improve ef-ficiency by enabling the recovery of wake vorticity.26 Other stud-ies indicate that birds can increase their aerodynamic efficiency vialarge-scale morphing of their wing geometries.27 A remarkably widerange of changes can be affected including variations in anhedral,dihedral, planform, camber, aspect ratio, wing sweep, and wingwarping.
Given that the performance of the current generation of MAVs isvastly inferior to that of birds, insects, and even full-scale UAVs, itseems logical that subsequent generations of MAVs could improvetheir performance by mimicking at least some aspects of biologi-cal flight. Thus, if MAVs are to approach and possibly exceed theperformance of biological flyers, advances are required in several
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

PINES AND BOHORQUEZ 295
fundamental areas including 1) low-Reynolds-number aerodynam-ics (<4 × 104), 2) lightweight and adaptive wing structures, 3) en-ergy storage/conversion to useful power/propulsion, and 4) insect-like flight navigation, guidance, and control. The status of the firstthree areas is reviewed next.
A. Low-Reynolds-Number AerodynamicsThe aerodynamics of MAV flight is affected by the scaling of the
Reynolds number Re, which is the ratio of inertial to viscous forcesin a fluid. For conventional steady-state aerodynamics, Re is definedas the product of a characteristic airfoil chord length and velocitydivided by the dynamic viscosity μ of the fluid and is defined bythe following relationship:
Re = ρV c/μ (4)
The Reynolds number characterizes the nature of the flow condi-tions over a body immersed in a fluid. To understand this importantrelationship, one simply needs to examine the range of Reynoldsnumber that applies to biological systems. Nachtigall28 postulatedthat the flow properties of biological creatures might be divided intothree regimes. The first regime is dominated by viscous forces, assmall organism attempt to propel themselves by wiggling throughthe fluid. The third regime is dominated by inertial effects that leadto the characteristic wake of a body moving through a fluid. Thesecond regime is the most difficult as insects and small birds tend togenerate vortices to stay aloft and move through a fluid. This is thesame flight regime in which most micro-air-vehicle designs reside.Thus, for a given wing at a given Mach number, one is interestedin maximizing the lift-to-drag ratio (L/D). This is often taken asa measure of a wing’s overall aerodynamic efficiency. This ratiois highly dependent on not just wing geometry, but also the givenflow conditions over the airfoil. Thus, for any airfoil the lift-to-dragratio can be written as a nonlinear function of Reynolds numbergiven by
L/D = f (Re) (5)
In 1980 McMasters and Henderson29 found that the maximum lift-to-drag performance of various airfoils vs Reynolds numbers dra-matically changed for Re < 105. In their studies they found thatat low Reynolds-numbers (in the flight regime of birds, insects,and MAVs), smooth airfoils perform worse than rough airfoils(see Fig. 8). However, at Re > 105 the performance of smooth air-foils greatly improves. This was primarily because of the underly-ing highly viscous laminar flow physics present at low Reynoldsnumbers.30 A more recent study by Baxter and East31 in thisReynolds-number regime, steady-state aerodynamic analysis re-veals that as the Reynolds number decreases the minimum powercondition for straight and level cruising flight can be approxi-
Fig. 8 L/Dmax vs Reynolds number for smooth and rough airfoils(McMasters and Henderson).
mated by
C2L min Power = (
3Cdo
/b)(Reref/Re)0.5 (6)
where Reref is the reference Reynolds number value of 105. Thus,it can be seen from this expression that as the Reynolds numberdecreases the profile drag increases. Baxter concluded that the min-imum drag-minimum power configuration of MAVs requires vehi-cles with lift coefficients in excess of three. These results indicatethat as the profile drag coefficient increases relative to the induceddrag coefficient, the operating CL at which minimum drag and mini-mum power are obtained are significantly higher than those requiredat more conventional flight Reynolds numbers (>105). Similar tofixed-wing airfoil studies, rotary-wing rotor aerodynamics sufferfrom the same flow physics that limit the performance of fixed-wing MAVs. In a recent study by Bohorquez et al.,19 blade elementmomentum theory (BEMT) coupled with a uniform inflow modelwas used to determine the two-dimensional lift and drag propertiesof several simple airfoil shapes at a tip Re = 3 × 104. They foundthat estimated maximum rotor lift-to-drag ratios ranged from 4 to10 (see Fig. 9). In addition, they found that the profile drag for rotorblades at Re < 3 × 104 constitutes a higher percentage of the totalpower required to hover than found in full-scale rotors. PreliminaryCFD and fluorescent oil-based flow-visualization experiments (seeFig. 10) revealed large-scale flow separation with only a fractionof the rotor having attached flow. This is largely because the flowin this regime is laminar, but also unstable and tends to separateeasily from the surface of airfoils. This is because the low inertialforces in the fluid boundary layer render it unable to stay attached
Fig. 9 Lift-to-drag ratio for several rotors with aspect ratio of 6 at atip Re = 3 ×× 104 calculated using BEMT.
Fig. 10 Oil flow-visualization Results on 6-in. rotors with tipRe = 3 ×× 104 and 8% curvature.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

296 PINES AND BOHORQUEZ
in the face of the adverse pressure gradients after the suction peak.Under certain conditions, the separated shear layer can reattach tothe surface, forming a laminar separation bubble (LSB).32−35 Morecommonly, the shear layer can transition to turbulent flow and onlythen have the kinetic energy to be able to reattach thereby forminga transitional separation bubble.
In addition, a number of complex and nonlinear flow phenomenacan cause the LSB to move back and forth over the airfoil as well asincrease and decrease in size. Although the discussion of these flowphysics is beyond the scope of the present paper, there have beennumerous techniques used to mitigate the effects of the LSB on theairfoil’s aerodynamic performance. These techniques include bothpassive and active flow control methods to inject disturbances intothe boundary layer at the proper scale length. A summary of thesetechniques is presented in a recent paper by Gad-el-Hak.36 The goalof flow control is to improve the overall aerodynamic efficiency ofairfoils and to transition laminar flow to turbulent flow as a meansof reducing the skin-friction drag and causing the flow to reattachover an airfoil.
This limit in aerodynamic efficiency using conventional steady-state aerodynamic theory has prompted many researchers to searchfor the unsteady aerodynamic mechanisms that might explain thehigh forces produced by insects and small birds.33−44 Pioneeringresearch by Lighthill,37 Rayner,38,39 and Pennycuick40,41 has pro-vided some insight into avian flight. However, until recently littlewas known regarding the complex kinematics of insect flight. Bi-ologists Ellington and Dickinson have made significant advancesin understanding the aerodynamic physics of insects. According toEllington42 (see Fig. 11), the wing stroke of an insect is typicallydivided into four kinematic portions: two translational phases (up-stroke and downstroke), when the wings sweep through the air witha high angle of attack, and two rotational phases (pronation andsupination), when the wings rapidly rotate and reverse direction.For comparative purposes, flap-ping flight of insects in hoveringmode is characterized by wing-beat frequency and mean Reynoldsnumber. Ellington42 approximates mean Reynolds number as
Re = 4� f R2/υAR (7)
where AR is the aspect ratio, f is the wing-beat frequency, R is thewing length/span, and � is the wingbeat amplitude (peak to peak).Using geometrical similarity and scaling relationships for wing-beat frequency, researchers discovered that the Reynolds numberincreases as a function of mass m0.42. For various sized insects,Reynolds number varies from 10 to 104. Over this wide range of
Fig. 11 Diagram of the vortex system during the complete wing-beat cycle. The shaded area at pronation denotes the morphological lower wingsurface on the insect diagram (insets). A large leading-edge vortex (LEV) with strong axial flow is observed during the downstroke. This LEV is stillpresent during supination, but turns into a hook-shaped vortex. A small LEV is also detected during the early upstroke and gradually grows intoa large vortex in the latter half of the upstroke. This LEV is still observed closely attached to the wing during the subsequent pronation, where atrailing-edge vortex (TEV) and a shear-layer vortex (SLV) are also formed, together forming a complicated vortex system (Ref. 42, 99).
Reynolds number for flapping flight, the flow regime is primar-ily laminar with several unsteady mechanisms contributing to theelevated performance of insect flight. The unsteady mechanismsthat have been proposed to explain the elevated performance of in-sect wings typically emphasize either the translational or rotationalphases of wing motion. However, the first unsteady effect to be iden-tified was a flapping mechanism termed the “clap and fling,”43 whichis a close apposition of the two wings preceding pronation that ac-celerates the development of circulation during the downstroke.44
Although the clap and fling can be important, especially in smallspecies, it is not used by all insects and thus cannot represent a gen-eral solution to the phenomenon of force production. Recent studiesby Dickinson and colleagues45−48 and Liu et al.49 suggest that sev-eral unsteady mechanisms might explain how insect wings generatesuch large aerodynamic forces over a complete wing-beat cycle.
A more detailed look at these aerodynamic mechanisms can beexplained by examining the flow physics associated with any airfoilwith increasing angle of attack. The high adverse pressure gradientsthat build up near the leading edge under dynamic translating (flap-ping) conditions cause flow separation to occur there. Experimentalevidence suggests the formation of a shear layer that forms justdownstream of the leading edge, which quickly rolls up and forms avortex. Not long after it is formed, this vortex leaves the leading-edgeregion and begins to convect over the upper surface of the airfoil.This induces a pressure wave that sustains lift and produces airloadswell in excess of those obtained under steady conditions. Althoughdelayed stall might account for enough lift to keep an insect aloft, itcannot easily explain how many insects can generate aerodynamicforces that exceed twice their body weight while carrying loads. Sev-eral additional unsteady mechanisms have been proposed, mostlybased on wing rotation. Depending on the Reynolds number (seeFig. 12), these mechanisms include delayed stall, wake capture,50
rotational circulation, and bound circulation. Dickinson et al.46 haveproposed that the flight of a drosophilia fly relies on complex kine-matic motion of the insect’s wings. This kinematic motion givesrise to unsteady lift and drag forces that exceed lift forces understeady aerodynamic loads at the same Reynolds number. Althoughthese recent advances in understanding aerodynamic physics havegiven researchers a clearer picture of low-Reynolds-number flight,researchers still have not been able to demonstrate a direct connec-tion between mechanisms and the forces generated in flight.
Thus, the major obstacle in realizing truly efficient micro air vehi-cles in the <100–200-g class are the complex unsteady aerodynamicmechanisms that contribute to the efficient lift and flight maneuver-ing capability of insects and small birds in the Reynolds number
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

PINES AND BOHORQUEZ 297
Fig. 12 Summary of unsteady aerodynamic mechanisms governing the flight regime of insects and small birds (http://socrates.berkeley.edu/flymanmd/).
Table 3 Proposed microengines58
Properties MIT UCB UMICH1 UMICH2
Mass, g 4 22.1 54.4 39.3Power, w 10 30 21.1 22.3Type: gas Wankel Swing Swing ——
turbine engine engine
range 50 < Re < 3 × 104. Thus, it will be necessary to develop anew set of analytical and computational tools to compliment ex-perimental investigations to study the complex steady and unsteadyaerodynamic flow behavior at low Reynolds numbers for biolog-ical flyers. Fortunately, aerospace researchers at the University ofFlorida,51 Notre Dame,52 Naval Postgraduate School,53 and at Cran-field University54−56 are making progress in trying to computation-ally and analytically model the complex aerodynamic mechanismsharnessed by biological flyers to complement experimental investi-gations by Dickinson and Ellington. However, these efforts are onlyin their early stages because data at low Reynolds (<3 × 104) arerelatively scarce for typical airfoil crosssections. Although Seliget al.57 at the University of Illinois have conducted extensive ex-perimental investigations on air foil sections at Reynolds numbersgreater than 3 × 104, there is still much to be understood in regardsto flow physics and parameters at much lower Reynolds numbers.For such low Reynolds numbers there is a degree of uncertaintyin the value of the average profile drag coefficient C Do. Some ex-perimental studies suggest that C Do at low Reynolds number forconventional NACA series airfoils can range from 0.05 to 0.0084 (atRe = 1 × 104 and 3 × 105, respectively) and for curved plates canrange from 0.17 to 0.08 (at Re = 104 and 6 × 104, respectively).58−62
The actual value depends on the viscous drag effects, geometry, andsurface roughness of the manufactured airfoils. Lift-to-drag ratios ofcharacteristic airfoils range from 2 to 8, depending on the Reynoldsnumber. These low lift-to-drag ratios make flight at this scale ex-tremely challenging.
B. Lightweight, Flexible and Adaptive Wing StructuresAlthough it is important to understand the flow physics associ-
ated with small-scale flight, one must not neglect the contributionof lightweight, flexible, and adaptive/morphing wing structures tothe overall system performance and mass fractions. Once again,geometric similarity provides a means for comparing the structuralefficiency of current MAV designs with those found in nature. There-fore, it is useful to compare MAV structural design parameters suchas wing span, aspect ratio, and wing loading to biological flyers.To enable this comparison, Rayner38,39 has developed a number ofgeometric scaling relationships for birds. These approximate rela-tionships are given next as a function of total body mass m:
Wing span = 1.17m0.39 (8)
Aspect Ratio = 8.56m0.06 (9)
Wing Loading = 62.2m0.28 (10)
Fig. 13 Wing span vs mass.
Fig. 14 Aspect ratio vs mass.
1. Geometric Wing Scaling: Wing Span, Aspect Ratio and Wing LoadingFigures 13–15 illustrate these geometric scaling relationships for
small birds and how they compare to three of the current fixed-wing MAV designs listed in Table 3. Although approximate, thesescaling relationships illustrate that most MAV designs have shorterwing spans and lower aspect ratios than their biological counterparts,suggesting more stringent control system requirements for MAVsat the same cruise condition than a bird of comparable weight. Thisimplies higher bandwidth control is required for MAVs with thesame GTOW. Another important property of wing span and aspectratio is its connection to the aerodynamic properties of an aircraft.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

298 PINES AND BOHORQUEZ
As the wing span and aspect ratio increase, the lift-to-drag ratio tendto increase, affecting the glide ratio of the aircraft. Thus, birds withlong wing spans and high aspect ratios are more akin to dynamicsoaring. Because most MAVs have short wing spans and low aspectratios, one would not expect for these vehicles to have great glideor soaring properties. These performance limitations are a result ofspan requirements imposed under the original Defense AdvancedResearch Projects Agency (DARPA) MAV program that limited thewing span to 15.24 cm (6 in.).
Figure 15 displays the average wing loading (N/m2) values forbirds as a function of body mass. Specific birds are displayed bythe “x” symbol. The wing loading for three MAVs is also displayedin this figure with the “o” symbol. Notice that the wing loading forMAVs is significantly higher than the equivalent size bird. This sug-gests that MAVs must fly faster in comparison to birds of comparablegeometric size, aerodynamic properties and weight to stay aloft. Toaccomplish this goal, MAVs must expend more power to overcomethe induced aerodynamic drag. In addition, a higher wing loadingmeans lower agility and maneuverability. Finally, the more loadedthe vehicle the less efficient it is because more power is needed tocarry the same unit load.
2. Wing DesignMost fixed-wing MAV designs are based on rigid-wing technol-
ogy (see Fig. 16) consisting of conventional rib/spar elements tosupport aerodynamic and structural loads. These structural elementshave been constructed from a number of different types of materialsincluding basal wood, foam core, and fiberglass skin combinations.In full-scale aircraft, rigid composite wings are used to support theair loads and to minimize structural dynamic effects so as to avoidunstable aeroelastic interactions. Material for these types of wingsmust consist of properties with high tensile strength and stiffness,but low structural weight. More importantly, wings at full scale do
Fig. 15 Wing loading vs mass.
Fig. 16 MAV fixed-wing design evolution.
not flap. However, for small-scale vehicles it is clear that naturesuggests that flapping flexible wings may be advantageous to en-hance the performance of small-scale microflight. The advantagesof the use of flexible wings include passive adaptive washout con-trol that extends the range of the aerodynamic lifting surface. Suchwings have the effect of suppressing wind gusts and restoring con-stant thrust and lift over the airfoil. Researchers at the University ofFlorida63 have developed numerous flexible fixed-wing designs andmanufacturing methods to understand the performance enhance-ments of flexible wings for fixed-wing MAVs.
To further understand the potential benefits of thin flexible wingsfor small-scale flight, one simply has to examine the form and func-tion of insect wing designs.64 Insect wings are comp. of thin cuticu-lar structures supported by a series of veins filled with insect bloodto provide a level of structural rigidity and flexibility to the wing.Patterns of wing venation are often highly complex. For a typicalinsect wing (see Fig. 17),65 the major veins originate at the axil-lary apparatus, running distally and toward the trailing edge of thewing. As displayed in Fig. 17, the median flexion line represents aradial groove or region of increased flexibility along which the wingcan deform to achieve variable camber. Two other flexion lines, theclaval furrow and jugal fold, help to achieve wing folding againstthe body.
Thus, MAV wing design represents one of the major challengesto efficient flight in the low-Reynolds-number regime. In the caseof flapping flight, it is important that mechanical wing designshave features of high specific strength, low specific modulus, andlow elastic modulus. The actual design choices will depend on thespecific wing kinematics and dynamics that are desired for the flap-ping air vehicle. However, researchers at Cranfield (Shrivenham)54
a)
b)
Fig. 17 Detailed wing morphology illustrating veins and folding lines.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

PINES AND BOHORQUEZ 299
have developed novel lightweight and stiff wing designs that mimicthe morphology of an insect wing involving elastic membranes withsupporting strut-like wing spars. Figure 18 displays this strut-likewing concept that consists of five spars wrapped in a membrane.Rather than subject spars and membrane to high loads, hinges havebeen used to create preferred directions of high deformations.
This approach offers a practical solution to inducing passive wingtwisting under high flapping frequencies. Active wing deformationscan occur by exploiting directional properties of membranes andactuator strategies associated wing warping. Although promising,the performance of this concept has not been evaluated.
a)
b)
Fig. 18 Metal wire wings: a) three models of five-spar metal wirewings,53 where top, a rigid structure with no hinges; middle, hingesmade of metal springs; bottom, hinges made by joining the spars withheat shrinking polypropylene “sleeves”; and b) effect of hinges on de-formation pattern.
a) b)
Fig. 19 Morphological camber shape changes along the span of drag-onfly wing.65
Finally, the most intriguing aspect of small-scale wing design isthe fact that it has been observed that both insects and birds undergosignificant morphological shape change in the geometry/stiffness(compliance) of their wings during flapping flight. This morpholog-ical shape change for some species is believed to occur passivelyas a built-in mechanism that enables the animal to reduce its dragprofile during the upstroke motion of its wing. To illustrate thisphenomenon, Fig. 19 displays the cross sections of a dragon flywing undergoing flapping flight.66 Notice that the chord dimensionreduces during the upstroke. In addition, one can also see somechanges in wing camber at various cross sections. Similarly, birds67
such as falcons use wing geometric shape change to loiter on stationin a high-aspect-ratio configuration using air currents and thermalsto circle above until they detect their prey. Upon detection, the birdmorphs into a strike configuration to swoop down on unsuspect-ing prey. This ability to change the nature of lift and drag over thewing using geometric changes expands the flight envelope of na-ture’s great flyers. Currently, none of the MAVs displayed in Fig. 4undergo morphological shape change to improve their lift, thrust,maneuverability, or resistance against wind gusts.
C. Energy Storage/Conversion to Useful Power/PropulsionAlthough maximizing the power-to-weight ratio is important for
all aerospace power systems, two factors make it absolutely crit-ical to micro air vehicles. First, the overall aerodynamic efficien-cies of conventional fixed-wing vehicles using steady-state anal-ysis tools decreases with size. This difference is reflected in thefact that the Reynolds numbers associated with micro-air-vehicleflight are several orders of magnitude smaller than those associ-ated with conventional flight making the aerodynamic efficiencyof lift-generating systems for micro air vehicles substantially lessthan their conventional-scale counterparts. Finally, the efficiencyof the power/propulsion system appears to degrade with decreas-ing size. Together, these factors conspire to make the power/weightratio and efficiency of the power system critical and enabling forhovering as well as fixed-wing mechanical flying vehicles. More-over, although improving efficiency at small scale is important, onemust also achieve mass fractions (subsystem mass to total mass) ofthe propulsion that are less than 50% of the total MAV mass. Asstated earlier, current MAVs exhibit propulsion system mass frac-tions of approximately 60% with respect to GTOW.
In contrast, a large fraction of the weight of small biological fly-ers is concentrated in muscle matter used to generate large-scalecomplex translational (flapping) kinematics. Rayner38,39 found thatapproximately 16% of the bird’s mass is comprised of the pectoral
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

300 PINES AND BOHORQUEZ
and supracoracoideus muscles. The pectoral muscle is used for thedownstroke of a bird’s wing and is significantly larger in mass frac-tion than the supracoracoideus muscle that is used for the upstrokemotion of the wing. In comparison, birds have approximately threetimes the mass fraction of muscle found in humans. Thus, this largemuscle mass fraction coupled with the elasticity/flexibility and lowinertia of a bird’s wing provides the necessary power and lift-to-weight ratios required for efficient low-Reynolds-number flight.
Although there is at least one example of a truly biomimeticpower system that converts chemical energy in ATP to mechanicalwork, practical biomimetic devices for converting stored energy tomechanical work are at least a decade away. However, there is avariety of energy conversion and propulsion systems that can de-liver 10 to 15 W of power to MAVs. These include microengines,battery/electric motor technology, micro fuel cells, and internal com-bustion engines. The status of some of these areas as they relate toMAV propulsion is discussed next.
1. MicroenginesA promising, but technically challenging propulsion and/or power
source is the micro turbine engine. These devices are capable ofproducing 10 to 50 W of power in a volume less than 1 cm3 whileconsuming only 7 grams of fuel per hour. Towards this goal, theMassachusetts Institute of Technology (MIT)68 Gas Turbine Lab-oratory has been developing a microelectromechanical-systems(MEMS) scale device under DoD funding, which consists of a1-cm-diam engine with a centrifugal compressor and radial inflowturbine, separated by a hollow shaft for thermal isolation, and sup-ported on air bearings. A working combustor has been built, butthe compressor, generator, and bearings have yet to be perfectedat the microscales. The program goal is to produce 13 g of thrustwith thrust-to-weight ratios approaching 100:1 (compared to 10:1for today’s modern jet fighter).
The United Kingdom’s Defense Evaluation and Research Agencyhas also successfully produced and demonstrated their own variantof a turbine engine at small scale. The device is 1.3 cm by 0.5 cmand weighs less than 2 g. It uses a hydrogen-peroxide-kerosenefuel mixture and has achieved 6.4 g of thrust for up to an hour ofoperation.
Other proposed microengines include those under development atUniversity of California, Berkeley and the University of Michigan.Cadou et al.69,70 summarize the expected performance parametersof various microengines in Table 3.
2. Battery/Electric Motors
Many of the MAVs listed in Table 3 have relied on battery powerto drive efficient electric motors. Compared to a rechargeable Nicadbattery of the same weight, a lithium ion or polymer batteries de-liver several times more energy. However, lithium ion and polymerbatteries suffer from low discharge rates and insufficient energy den-sity (150 W · hr per kg) to sustain long-duration MAV flight. Recentadvances include the development of thin flexible/conformal sheetsof lihium ion battery technology. This new development enablesthe battery to double as a multifunctional structure supporting aero-dynamic lift and as a source of energy. This can enable the nextgeneration of MAVs to stay aloft longer.
3. Micro Fuel CellsAlthough fuel-cell technology71 is less mature, it is anticipated
that progress will result in energy densities that are at least two tofour times greater than lithium-ion battery technology. Recently,MTI, Inc, has developed a direct methanol micro fuel cell for thewireless consumer market. These fuels cells have energy densitiesof approximately 240 W · h/kg. Although the energy density ap-pears to meet the needs of MAV designers, size limits their use inMAV applications. IGR Enterprises, Inc, was funded by DARPAto develop a MAV fuel cell weighing less than 30 g and producingapproximately 20 W of power for 1 h. However, this technology isprobably a few years from finding itself on MAVs.
Fig. 20 Comparison of MAV endurance associated with various en-ergy storage/conversion systems.69
Fig. 21 Estimated efficiency of various hydrocarbon-fueled ICengines.69
4. Internal Combustion Engines72,‡
In the near term, Fig. 20 shows that energy storage and conversiontechnology based on hydrocarbon fuels and small reciprocating en-gines that exist today can provide acceptable levels of performancefor 200-g class MAVs, that is, if the estimates of engine powerand efficiency are correct. Although their thermal efficiencies atMAV scales are low, their power densities are quite high, typically1 w/g. Such engines have already been developed for the hobby-classcommunity such as the Cox Tee Dee 0.01, which is only 0.01 in.3
in volume but can produce about 20 W of power.One problem is that these estimates of engine power and efficiency
are based on manufacturer’s published data,70 which is rudimentary.Manufacturers usually report only peak power at a particular oper-ating speed, which means that fuel consumption information andefficiency must be estimated. Actual data showing power curvesand efficiency (specific fuel consumption) information are never re-ported because these engines are primarily produced for hobbyists.Moreover, manufacturers’ reported data are often highly suspect.There are many reports in the literature about engines with highpower whose performance in model aircraft/cars/boats is worse thanengines with lower reported power. Although this apparent anomalycould be the result of intentional deception by manufacturers, itcould also result from the lack of standardized testing proceduresbetween manufacturers. Cadou shows that efficiency estimates (seeFig. 21) for small reciprocating engines vary widely and seem toshow only weak scaling with engine size in comparison to full-scale engines. Clearly, reliable data produced using standardizedtesting procedures are required to verify the performance capability
‡Data available online at http://www.globalsecurity.org/intell/library/reports/2001/uav0401.htm.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

PINES AND BOHORQUEZ 301
Fig. 22 Estimate of mass fractions computed for birds.
of existing IC engines and to understand how to optimize perfor-mance for use in biomimetic MAVs.
Another problem apparent from Fig. 20 is that building efficientIC engines becomes more difficult as engine size is reduced. Ther-mal and frictional losses scale directly with surface/volume ratioand therefore increase as the size of the engine is reduced. Severalresearch teams building microengines in the 10-Watt/5-g class haverecognized this problem but exactly how these losses scale withdevice size is not well understood. Although this information iscritical to designers of MAVs who need to be able to make realisticestimates of the performance capability of a particular size powersystem before it is actually built, there has been very little work ondeveloping reliable scaling laws.
D. Summary of Status and Performanceof Current MAV Development
In summary, it appears that the major reason for the across-the-board failure to achieve true long-loiter, highly maneuverable, andhovering flight in a single configuration is that all of the config-urations/designs depicted in Fig. 4 rely on conventional steady-state aerodynamic mechanisms that become inefficient at the lowReynolds numbers associated with smooth airfoils and rotors. Theinefficient utilization of aerodynamic lift coupled with relatively in-efficient systems for storing and releasing energy (power systems)are the two most significant factors inhibiting the development ofefficient miniature mechanical flying machines. From a systems per-spective, it appears that biological flyers achieve remarkable massfractions (Nature’s Great Flyers reference) (see Fig. 22) when com-pared to miniature mechanical flyers. Thus, future MAV designswill undoubtedly take some lessons from nature to achieve efficientoperating mechanical flying machines.
IV. Emerging MAV Research and Technology TrendsThe next generation of MAV designs that show the greatest
promise are the ornithopter configurations. Up to now, there has beenlittle research toward the development of these types of configura-tions. Researchers at Caltech and Aervironment, with its prototypeMicrobat, have placed their focus on the wing design, where flexiblethin membranes, similar to bat wings are used. Because reproducingthe complex kinematics of biological flyers is challenging, one ofthe primary problems faced when using simplified movements is theincreased drag in the upstroke. To reduce this drag, MEMs electro-static actuator valves have been incorporated to parylene wings inorder to control the flow through the membrane.73,74 Without elec-trostatic actuation air can move freely from one side of the skin tothe other side trough the vent holes. With actuation, these vent holesare sealed, and the airflow is controlled. The membrane behaves asa complete diaphragm. Actuation is done on the downstroke andstopped on the upstroke reducing the drag of the wings over theflapping cycles. To aid the design of ornithopters, one can againexamine the characteristics of biological creatures. Studies of birdsby Rayner39 and Norberg67 have revealed the following scaling re-
lationships characterizing the flapping wingbeat frequency used toacquire thrust and lift:
fmin = 2m−0.1667 (11)
fmax = 8m−0.333 (12)
fhum min gbird = 1.32m−0.6 (13)
These expressions offer some insight into the potential range offuture practical flapping wing MAV designs. For insect-size vehiclesin the milligram to tens of grams weight class, wing-beat frequencyscales with m−0.24, albeit with significant scatter in the data. Theseflapping frequency scaling relationships offer some guidelines forachieving flapping flight; however, the details lie in the developmentof efficient lightweight flapping mechanisms that harness similarwing-beat kinematics and unsteady aerodynamics found in insectsand small birds.
A. Flapping MechanismsTo achieve flapping flight, researchers must develop monolithic
lightweight devices that can generate large-scale kinematic angularmotion with minimal mechanical effort. Insects and small birds ac-complish flapping flight in different ways but rely heavily on theiranatomy. In the case of an insect, the structural components requiredfor flight derive from the morphological exoskeleton of insect bodydesign. The key element in the insect anatomy is the thorax. Flex-ibility is essential for the insect thorax, as internal muscular forcescause the thorax to deform and either directly or indirectly transmitforces to the wings. Elastic return of stored energy is also impor-tant to minimize the total effort required during a wing-beat cycle.Figure 23 shows a cross-sectional view of the thoracic segmentillustrating the intrinsic flight muscles that are used for flappingflight. It is believed that two different sets of thoracic muscles areprimarily responsible for complex wing motions. These muscles
a)
b)
Fig. 23 Cross section of thorax revealing indirect/direct flight musclesresponsible for insect flapping flight.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

302 PINES AND BOHORQUEZ
a) Mockup of Robofly
b) 4-bar flapping mechanism
Fig. 24 University of California, Berkeley’s Robofly.74,75
act either directly on the wing base and sclerites of the auxiliaryapparatus65 or can act indirectly to move the wings via indirect tho-racic deformation. Although the details of the interaction of thesemuscles that enable flapping flight remain a research topic in thebiological community, researchers at a number of institutions haveeither developed or are developing complex mechanical devices thatcan generate simultaneous pitching, flapping, and translating motionof a small-scale wing.
Recently, a team at the University of California, Berkeley, has de-veloped a piezoelectric wing-driven flap actuation mechanism75,76
that can generate the kinematic motion required for mimicking theaerodynamic performance of a fruitfly (Drosophila). The mechani-cal equivalent is named “Robofly” and attempts to mimic the kine-matics of a fly. A conceptual view of this concept is displayed inFig. 24a. This vehicle was designed for a Reynolds-number flightregime of 150 and weighs approximately 350 mg. The flappingmechanism was designed using a four- and five-bar linkage schemesdriven by piezoelectric actuators. A picture of one of the early mech-anism designs is displayed in Fig. 24b. Unfortunately, this conceptwas never able to achieve enough lift force to support its own weighteven with tethered power.
DeLaurier and his students at the University of Toronto workingclosely with Kornbluh and his colleagues at SR International§ haveinvestigated the clap and fling unsteady aerodynamic mechanismcommonly found in insects and small birds to generate lift. Kornbluhattempted to develop a mechanism that generates the unsteady clap-fling motion using electroactive polymer actuators. These elas-tomeric actuators produce large stroke at reasonable frequencies,but require high voltage to drive them. The high voltage requiredby the actuators precluded their use in a flapping vehicle designcalled Mentor. Nevertheless, a larger than MAV scale flapping ve-hicle (∼500 g) that harnessed the clap-fling flapping motion was
§Data available online at http://www.erg.sri.com/automa-tion/actuators.html.
Fig. 25 MENTOR flying vehicle.
Fig. 26 Biomimetic rotating/flapping/pitching mechanism.§
developed with both electric and internal combustion-driven power.The MENTOR vehicle was the first of its kind to fully hover underbiologically inspired flapping wing propulsion (see Fig. 25).
At the University of Maryland, the author and his students77 de-veloped a rather unusual flapping, pitching, and rotating device forevaluating the effects of unsteady rotor motion on the hover perfor-mance of small-scale rotorcraft designs. In the spirit of generatinglarge-scale kinematic motion, a biomimetic mechanical mechanismhas been developed, which rotates like a conventional rotary-wingconfiguration but is capable of undergoing large angular changes inits pitch and flap degrees of freedom at high frequency. The pitchand flap degrees of freedom can be independently controlled to gen-erate unsteady air loads. A conceptual view of this mechanism isdisplayed in Fig. 26. Preliminary results of unsteady pitching at 1/4per rev frequencies show a significant performance gain in the figureof merit near the onset of dynamic stall.
Finally, in the United Kingdom, Zbikowski (personal communi-cation) and his colleagues at Cranfield (Shrivenham) have developeda flapping mechanism for evaluating the wide range of motion asso-ciated with flapping insect flight. However, there are little publisheddata on this device and its ability to mimic the unsteady physics thatinsects and small birds use to acquire efficient aerodynamic lift inhover and forward flight.
Intricate actuation of the flapping mechanism is another potentialapplication for smart material technology; the use of conventionalelectric motors requires the transformation of rotating motion intoa linear reciprocating movement. This involves a certain mechan-ical complexity, added weight, and more important, a fixed move-ment pattern, that makes it difficult to change the flapping amplitudeand hence restricts the control schemes and experimental degreesof freedom. Smart linear actuators can alleviate these problems byproviding controllable stroke amplitude at high frequencies. In addi-tion, the efficient transduction of mechanical power will be essentialfor achieving long endurance and reliable flapping flight.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

PINES AND BOHORQUEZ 303
Fig. 27 Aerovironment WASP MAV.81
B. Morphological Shape ChangesAlthough large-scale kinematic flapping motion is of importance,
radical shape changes along the span, chord, and thickness directionscould also be quite significant to small-scale vehicle performance.For example camber modification along the chord could be used toadapt the airfoil to different flight conditions. In addition wing-tipeffects can significantly affect the aerodynamic performance in-cluding the wake structure several chord lengths removed from theunsteady vortex interactions. So the simultaneous use of shape trans-formations could provide enough control authority to command theMAV. Towards this goal, morphing structures technology78−81 is inits initial stages of development by researchers at NASA LangleyResearch Center at a much larger length scale; however, such tech-nology might find its way into small-scale flying machines.
C. Multifunctional StructuresAnother emerging technology is the integration of additional
functionality into a wing structure, for example, including beingable to support air loads of an air vehicle wall also providing power,sensing, or communication. Recently, researchers from the NavalResearch Laboratory in conjunction with Aerovironment and Tel-cordia flight tested a multifunctional wing that was integrated withconformal lithium-ion battery technology under DARPA¶support.The wing while acting as the main lifting surface also served as asource of battery power in the form of conformal lithium-ion bat-tery packs. A picture of the MAV is displayed in Fig. 27. The MAVweighed approximately 150 g and had a wing span of 14 in. Thefixed-wing MAV had a measured flight time of 107 min. Thus far,this has exceeded the endurance of all other fixed-wing/ and ro-tary air vehicles listed in Table 3. Other opportunities for the use ofmultifunctional structures technology in MAV applications includeconformal antennas mounted to the aerodynamic wing or fuselageof an MAV to provide line-of-sight communication to the ground,as well as the use of self-consuming or “autophagous” structuresthat provide aerodynamic lift but are consumed as power for flightis extracted from the wing material.
D. Emerging Propulsion/Power TechnologyEmerging propulsion technologies‡ include the following:1) Beaming energy to the aircraft for conversion to electricity us-
ing either microwaves or lasers eliminates the need to carry propel-lant onboard, but requires a tremendous transmit-to-receive powerratio (microwaves) or very precise pointing (lasers) and limits flightto within line of sight of the power source (both). Microwave beam-ing would take 100 kW (134 hp) of transmit power to run just amicro-UAV at a range of 0.6 miles, let alone a more substantiallysized aircraft, whereas a laser would only require around 40 W
¶Data available online at http://www.darpa.mil/body/news.html.
(0.05 hp) of power. Recently, a team of researchers from NASAMarshall Space Flight Center and the University of Alabama demon-strated that a small-scale aircraft can fly under laser power.
2) Reciprocating chemical muscles (RCMs) are regenerative de-vices that use a chemically actuated mechanical muscle (ionomers)to convert chemical energy into motion through a direct, noncom-bustive chemical reaction. Power generated via an RCM can be usedfor both propulsion (via wing flapping) and powering of onboardflight systems. RCM technology could power future generationsof MAVs, providing vertical takeoff and landing as well as hovercapabilities.
3) Improvements in electric battery technology such as the de-velopment of lithium sulfur batteries have higher specific energy(>400 W · h/kg) than lithium ion technology.
V. Notable Firsts in the MAV Flight RegimeSimilar to the 100-year history of powered human flight, there
have been several notable firsts that have been achieved by re-searchers working in the MAV field based on DoD’s MAV designrequirements. An incomplete, but growing list includes:
1) The first battery-powered electric motor open-loop controlledflapping flight was by Microbat-CalTech/Aerovironment.
2) The longest endurance (<100 g) is >30 min of a fixed-wingMAV by Black Widow Aerovironment.
3) The first autonomous MAV flight (global-positioning-systemwaypoint navigation) was by Microstar–Lockheed Martin.
4) The first open-loop controlled hovering flight of a biologicallyinspired flapping vehicle was by MENTOR-SRI.
5) The longest-endurance flapping flight (<100 g) was ∼25 minsby 9-in.-Microbat-Aerovironment.
Although many of these notable firsts are debatable, it is clearthat the development of MAV technology is still in its infancy andintersects at the congruence between science and engineering. Asnew physics is discovered and understood, these ideas will be incor-porated in the next generation of MAV designs.82 New capabilitiesprojected for the next generation of UAVs include the following1) silent flight as fuel cells and battery technology supplant internalcombustion engines; 2) 60% gains in endurance caused by increas-ingly efficient turbine engines; 3) self-repairing, damage compen-sating, more survivable UAVs; 4) adaptive MAVs using novel actu-ator and sensor technology; 5) speedier information availability tousers through onboard real-time processing and higher data rates;6) autonomous operation in open and confined spaces using vision-based image processing; and 7) multimodality UAVs capable ofoperating in different mediums such as water and air.
VI. SummaryIn summary, nature has evolved thousands of insects and small
birds that outperform man-made miniature flying machines rou-tinely. Although some of the details underlying the operational suc-cess of biological fliers remain a research topic, a general pictureis emerging, which indicates that the overwhelming superiority ofbiological fliers over existing MAVs stems from three fundamentalfactors: an ability to generate lift more efficiently than existing tech-nologies, an ability to harness morphological shape changes in wingkinematics/structure, and an ability to store and release energy moreefficiently. The major obstacle in this endeavor is our limited under-standing of the physics of micro-and ultimately nanoflight (<5-cmwing span). The research programs in the United States, as wellas others worldwide, have spearheaded a great deal of interest inmicroscale flight physics that is still evolving. Although significantprogress has been made, it is likely that the next generation of small-scale flying machines will be inspired by advances in the follow-ing areas: 1) low-Reynolds-number aerodynamics, analytical andcomputational models; 2) lightweight, adaptive, and biologicallyinspired multifunctional materials and structures; 3) micropropul-sion/power sources; 4) robust flight navigation and control usinginsect-like optic flow vision; 5) miniaturized navigation and controlelectronics; and 6) system engineering tools. Assuming that theseadvances are achieved, it is still difficult to project what these new ve-hicles will look like. Will nature provide clues? How much will these
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

304 PINES AND BOHORQUEZ
new vehicles cost? These questions are sure to be answered over thenext decade by researchers working at the intersection of biologyand engineering. Thus, in order to make future advances in MAVtechnology it might be wise to heed the words of the Wilbur Wright:“It is possible to fly without motors, but not without knowledge andskill.”
AcknowledgmentsThe author would like to thank several colleagues at the Uni-
versity of Maryland including Chris Cadou for providing informa-tion on propulsion/power issues at small scale. A special thanks toJ. Gordon Leishman for his insights on low-Reynolds-number flowphysics and performance of rotary-wing airfoils. Finally, the au-thor would also like to thank Inderjit Chopra and Norman Wereley,as well as graduate students, Felipe Bohorquez, Jayant Sirohi, PaulSamuel, Joseph Conroy, Ron Perel, Falcon Rankins, Berinder Singh,Sylvain Morel-Fatio, and Julie Blondeau for numerous discussionson micro-air-vehicle technology. This work was supported in partby the National Rotorcraft Technology Center under Contract Num-ber NC-2944, with Yung Yu serving as contract monitor, and by theArmy Research Office, under Contract Number W911NF0410176,with Gary Anderson serving as contract monitor.
References1Gallington, R. W., Merman, H., Entzminger, J., Francis, M. S., and
Palmore, P., “Unmanned Aerial Vehicles,” Future Advances in AeronauticalSystems, AIAA, Reston, VA, 1996, Chap. 6.
2NASA GSFC/Wallops UAV Database [online database], URL: http://uav.wff.nasa.gov/db/uav index.htm.
3Tennekes, H., Nature’s Great Flyers, MIT Press, Cambridge, MA, 2001.4Hundley, R. O., and Gritton, E. C., “Future Technology Driven Revo-
lutions in Military Operations: Results of a Workshop,” RAND Corp., DB-110-ARPA, Santa Monica, CA, 1994.
5“Micro Spy Planes, Inside the World’s Smallest Aircraft,” PopularScience, Jan. 1998, p. 53.
6Nordwall, B. D., “Micro Air Vehicles Hold Great Promise, Challenges,”Aviation Week and Space Technology, Vol. 146, No. 5, 14 April, 1997,pp. 67, 68.
7Davis, W. R., Jr., Kosicki, B. B., Boroson, D. M., and Kostishack, D. F.,“Micro Air Vehicles for Optical Surveillance,” The Lincoln Laboratory Jour-nal, Vol. 9, No. 2, 1996, pp. 197–213.
8Grasmeyer, J., and Keenon, M., “Development of the Black Widow Mi-cro Air Vehicle,” AIAA Paper 2001-0127, Jan. 2001.
9Pornsin-Sirirak, T. N., Lee, S. W., Nassef, H., Grasmeye, J., Tai, Y. C.,Ho, C. M., and Keennon, M., “MEMS Wing Technology for a Battery-Powered Ornithopter,” Proceedings of the 13th IEEE Annual InternationalConference on MEMS 2000, pp. 779–804.
10Michelson, R., Helmick, D., Reece, S., and Amarena, C., “A Recipro-cating Chemical Muscle (RCM) for Micro Air Vehicle ‘Entomopter’ Flight,”1997 Proceedings of the Association for Unmanned Vehicle Systems, Inter-national, 1997, pp. 429–435.
11Michelson, R., “Update on Flapping Wing Micro Air Vehicle Research-Ongoing Work to Develop a Flapping Wing, Crawling Entomopter,” April1998.
12Kornbluh, R., “Project Mentor: Biologically Inspired Platform,”Keynote Presentation at the 8th AIAA/CEAS Aeroacoustics Conference,17–19 June 2002.
13Morris, S. J., “Design and Flight Test Results for Micro-Sized Fixed-Wing and VTOL Aircraft,” 1st International Conference on Emerging Tech-nologies for Micro Air Vehicles, 1997, pp. 117–131.
14Cox, A., Monopoli, D., Cveticanin, D., Goldfarb, M., and Garcia, E.,“The Development of Elastodynamic Components for Piezoelectrically Ac-tuated Flapping Micro Air Vehicles,” Journal of Intelligent Material Systemsand Structures, Vol. 13, No. 9, 2002 pp. 611–615.
15Samuel, P., Sirohi, J., Rudd, L., Pines, D., and Perel, R., “Design and De-velopment of a Micro Coaxial Rotorcraft,” Proceedings of the AHS VerticalLift Aircraft Design Conference, American Helicopter Society, Alexandria,VA, Jan. 2000.
16Kroo, I., and Kunz, P., “Meso-Scale Flight and Miniature RotorcraftDevelopment,” Fixed and Flapping Wing Aerodynamics for Micro Air Ve-hicle Applications, edited by T. J. Mueller, Progress in Astronautics andAeronautics, AIAA, Reston, VA, 2001, pp. 503–517.
17Young, L. A., Aiken, E. W., Johnson, J. L., Demblewski, R., Andrews, J.,and Klem, J., “New Concepts and Perspectives on Micro-Rotorcraft andSmall Autonomous Rotary Wing Vehicles,” Proceedings of the 20th AIAAApplied Aerodynamics Conference, AIAA, Reston, VA; also AIAA Paper2002-2816, June 2002.
18Leishman, J. G., Principles of Helicopter Aerodynamics, CambridgeUniv. Press, New York, 2000, Chap. 2.
19Bohorquez, F., Samuel, P., Sirohi, J., Pines, D., Rudd, L., and Perel, R.,“Design, Analysis and Hover Performance of a Rotary Wing Micro AirVehicle,” AHS Journal, Vol. 48, 2 April 2003, pp. 80–90.
20Wang, Z. J., “Two Dimensional Mechanism for Insect Hovering,” Phys-ical Review of Letters, Vol. 85, No. 10, 2000, p. 2035.
21Dalton, S., Borne on the Wind, Reader’s Digest Press, New York, 1975.22Ellington, C. P., (1984), “Morphological Parameters, The Aerodynam-
ics of Hovering Insect Flight,” Philosophical Transactions of the Royal So-ciety of London, Ser. B, Vol. 305, Feb. 1984, pp. 17–40.
23Ellington, C. P., and Pedley, T. J., (eds.), Biological Fluid Dynamics,Company of Biologists, London, 1995, pp. 109–129.
24Nachtigall, W., Insects in Flight, McGraw–Hill, New York, 1974.25Ellington, C. P., “Aerodynamics and the Origin of Insect Flight,” Ad-
vances in Insect Physiology, Vol. 23, 1991, pp. 171–210.26Dickinson, M. H., “Unsteady Mechanisms of Force Generation in
Aquatic and Aerial Locomotion,” American Zoologist, Vol. 36, No. 6, 1996,pp. 537–554.
27Rayner, J. M. V., “Form and Function in Avian Flight,” Current Or-nithology, edited by R. F. Johnston, Vol. 5, Plenum, New York, 1988,pp. 1–66.
28Brodsky, A. K., The Evolution of Insect Flight, Oxford Univ. Press,New York, 1994, p. 51.
29McMasters, J. H., and Henderson, M. L., “Low Speed Single ElementAirfoil Synthesis,” Technical Soaring, Vol. 6, No. 2, 1980, pp. 1–21.
30Peltier, A., and Mueller, T. J., “Low Reynolds Number Aerodynamics ofLow-Aspect-Ratio, Thin/Flat/Cambered-Plate Wings,” Journal of Aircraft,Vol. 37, No. 5, 2000, pp. 825–832.
31Baxter, D., and East, R., “A Survey of Some Fundamental Issues inMicro-Air-Vehicle Design,” Proceedings of the 14th Bristol InternationalConference on UAV Systems, Paper 34, Univ. of Bristol, Bristol, U.K., 1999.
32O’Meara, M. M., and Mueller, T. J., “Laminar Separation Bubble Char-acteristics on an Airfoil at Low Reynolds Numbers,” AIAA Journal, Vol. 25,No. 8, 1987, pp. 1033–1041.
33Pauley, L., Moin, P., and Reynolds, W., “The Structure of Two-Dimensional Separation,” Journal of Fluid Mechanics, Vol. 220, 1990,pp. 397–411.
34Pauley, L., and Lin, J. C., “Low Reynolds Number Separation on anAirfoil,” AIAA Journal, Vol. 34, No. 8, 1996, pp. 1570–1577.
35Tatineni, M., and Zhong, X., “Numerical Study of Unsteady Low-Reynolds-Number Separation Bubbles Using a New High Order Scheme,”Proceedings of the 31st AIAA Fluid Dynamics Conference and Exhibit,AIAA, Reston, VA, 2001; also AIAA Paper 2001-2712, June 2001.
36Gad-el-Hak, “Flow Control: The Future,” Journal of Aircraft, Vol. 38,No. 3, 2001, pp. 402–418.
37Ligthhill, M. J., “Introduction to the Scaling of Aerial Locomotion,”Scale Effects in Animal Locomotion, edited by T. J. Pedley, Academic Press,New York, 1977, pp. 365–377.
38Rayner, J. M. V., “A New Approach to Animal Flight Mechanics,”Journal of Experimental Biology, Vol. 80, April 1979, pp. 17–54.
39Rayner, J. M. V., “Form and Function in Avian Flight,” Current Or-nithology, edited by R. F. Johnston, Vol. 5, Plenum, New York, 1988,pp. 1–66.
40Pennycuick, C. J., Bird Flight Performance: A Practical CalculationManual, Oxford Univ. Press, New York, 1989.
41Pennycuick, C. J., “Wingbeat Frequency of Birds in Steady Cruis-ing Flight: New Data and Improved Predictions,” Journal of ExperimentalBiology, Vol. 199, July 1996, pp. 1613–1618.
42Ellington, C. P., “The Novel Aerodynamics of Insect Flight: Applica-tions to Micro-Air Vehicles,” Journal of Experimental Biology, Vol. 202,Dec. 1999, pp. 3439–3448.
43Weis-Fogh, T., “Quick Estimates of Flight Fitness in Hovering Animals,Including Novel Mechanisms for Lift Production,” Journal of ExperimentalBiology, Vol. 59, Aug. 1973, pp. 169–230.
44Spedding, G. R., and Maxworthy, T., “The Generation of Circulationand Lift in a Rigid Two Dimensional Fling,” Journal of Fluid Mechanics,Vol. 165, 1986, pp. 247–272.
45Dickinson, M. H., Lehmann, F.-O., and Sane, S., “Wing Rotation andthe Aerodynamic Basis of Insect Flight,” Science, Vol. 284, No. 18, 1999,pp. 1954–1960.
46Dickinson, M. H., Lehmann, F.-O., and Chan, W. P., “The Control ofMechanical Power in Insect Flight,” American Zoologist, Vol. 38, No. 4,1998, pp. 718–728.
47Sanjay, S. P., and Dickinson, M. H., “The Control of Flight Force by aFlapping Wing: Lift and Drag Production,” Journal of Experimental Biology,Vol. 204, No. 15, 2001, pp. 2607–2626.
48Dickinson, M. H., “Solving the Mysteries of Insect Flight,” ScientificAmerican, Vol. 284, No. 6, 2000, pp. 49–57.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2

PINES AND BOHORQUEZ 305
49Liu, H., Ellington, C. P., and Kawachi, K., “A Computational Study ofHawkmoth Hovering,” Journal of Experimental Biology, Vol. 201, No. 4,1998, pp. 461–477.
50Maxworthy, T., “The Fluid Dynamics of Insect Flight,” Journal of FluidMechanics, Vol. 93, 1981, pp. 47–63.
51Shyy, W., Berg, M., and Ljungqvist, D., “Flapping and Flexible Wingsfor Biological and Micro Air Vehicles,” Progress in Aerospace Sciences,Vol. 35, No. 5, 1999, pp. 455–505.
52Mueller, T., and DeLaurier, J. D., “An Overview of Micro Air Vehi-cle Aerodynamics,” Fixed and Flapping Wing Aerodynamics for Micro AirVehicle Applications, AIAA, Reston, VA, 2001, pp. 1–10.
53Jones, K. D., Lund, T. C., and Platzer, M. F., “Experimental and Compu-tational Investigation of Flapping Wing Propulsion for Micro Air Vehicles,”Fixed and Flapping Wing Aerodynamics for Micro Air Vehicle Applications,edited by T. Mueller, Progress in Astronautics and Aeronautics, Vol. 195,AIAA, Reston, VA, 2001, pp. 307–339, Chap. 16.
54Zbikowski, R., “Current Research on Flapping Wing Micro Air Vehiclesat Shrivenham,” Proceedings of the AVT Symposium on Unmanned Vehiclesfor Aerial, Ground and Naval Military Operations, NATO, Oct. 2000.
55Zbikowski, R., “On Aerodynamic Modeling of an Insect-Like FlappingWing in Hover for Micro Air Vehicles,” Philosophical Transactions of theRoyal Society of London (Series A: Mathematical, Physical and EngineeringSciences), Vol. 360(1791), Feb. 2002, pp. 273–290.
56Szmelter, J., and Zbikowski, R., “Progress in Aerodynamic Studies ofMicro Air Vehicles Based on Insect-Like Flapping Wings,” AIAA Paper2003-419, Jan. 2003.
57Selig, M. S., Guglielmo, J. J., Broeren, A. P., and Giguere, P., Summaryof Low-Speed Airfoil Data, Vol. 1, SolarTech Publications, Virginia Beach,VA, 1995.
58Bruining, A., “Aerodynamic Characteristics of a Curved Plate AirfoilSection at Reynolds Numbers 60,000 and 100,000 and Angles of Attackfrom −10 to +90 Degrees,” Technische Hogeschool, Dept. of AerospaceEngineering, Report Number VTH-LR-281, Delft, The Netherlands, May1979.
59Carmichael, B. H., “Low Reynolds Number Airfoil Survey,” Vol. I,NASA CR 165803, 1981.
60Sunada, S., Sakaguchi, A., and Kawachi, K., “Airfoil Section Character-istics at a Low Reynolds Number,” Journal of Fluids Engineering, Vol. 119,March 1997, pp. 129–135.
61Sunada, S., “Comparison of Wings Characteristics at an Ultra LowReynolds Number,” Journal of Aircraft, Vol. 39, No. 2, 2000, pp. 331–338.
62Azuma, A., Okamoto, M., and Yasuda, K., “Aerodynamic Charateristicsof Wings at Low Reynolds Number,” Fixed and Flapping Wing Aerodynam-ics for Micro Air Vehicle Applications, edited by T. J. Mueller, Progress in As-tronautics and Aeronautics, Vol. 195, AIAA, Reston, VA, 2001, pp. 341–391.
63Ifju, P., Jenkins, D. A., Ettinger, S., Lian, Y., Shyy, W., and Wasza,M. R., “Flexible Wing Based Micro Air Vehicles,” AIAA Paper 2002-0705,Jan. 2002.
64Wootton, R. J., “The Mechanical Design of Insect Wings,” ScientificAmerican, Vol. 263, Nov. 1990, pp. 114–120.
65Dudley, R., “The Biomechanics of Insect Flight,” Form, Function, Evo-lution, Princeton Univ. Press, NJ, 2000.
66McMahon, T., and Bonner, J. T., One Size One Life, Scientific AmericanBooks, Inc., New York, 1983.
67Norberg, U. M., Vertebrate Flight: Mechanics, Physiology, Morphol-ogy, Ecology and Evolution, Springer-Verlag, New York, 1990.
68Epstein, A. H., and Senturia, S. D., “Macro Power from Micro Machin-ery,” Science, Vol. 276, May 1997, p. 1211.
69Cadou, C., Sookdeo, T., Moulton, N., and Leach, T., “PerformanceScaling and Measurement for Hydrocarbon-Fueled Engines with Mass LessThan 1 kg,” AIAA Paper 2002-3448, May 2002.
70Cadou, C. P., Moulton, N., and Menon, S., “Performance Measurementand Scaling in Small internal Combustion Engines,” AIAA Paper 2003-671,Jan. 2003.
71Fu, K., Knobloch, A. J., Martinez, F., Walther, C. D., Fernandez-Pello,C., Pisano, A. P., Liepmann, D., Miyaska, K., and Maruta, K., “Design andExperimental Results of Small-Scale Rotary Engines,” Proceedings of the2001 (IMECE), ASME, Paper 41, 2001, pp. 295–302.
72Chigier, N., and Gemci, T., “A Review of Micro Propulsion Technol-ogy,” AIAA Paper 2003-670, Jan. 2003.
73Pornsin-Sirirak, T. N., Tai, Y. C., Nassef, H., and Ho, C. M., “FlexibleParylene Actuator for Micro Adaptive Flow Control,” Proceedings of the14th IEEE International MEMS Conference (MEMS ’01), Vol. 1, IEEE,Piscataway, NJ, 2001, pp. 511–514.
74Pornsin-Sirirak, T. N., Tai, Y. C., Nassef, H., and Ho, C. M., “Unsteady-State Aerodynamic Performance of Mems Wings,” International Symposiumon Smart Structures and Micro Systems 2000, Vol. 1, IEEE, Piscataway, NJ,2000, pp. G1-2.
75Fearing, R. S., Chiang, K. H., Dickinson, M. H., Pick, D. L., Sitti, M.,and Yan, J., “Wing Transmission for a Micromechanical Flying Insect,”IEEE International Conference on Robotics and Automation, Vol. 1, IEEE,Piscataway, NJ, 2000, pp. 1509–1516.
76Avadhanula, S., Wood, R. J., Campolo, D., and Fearing, R. S., “Dynami-cally Tuned Design of the MFI Thorax,” Proceedings of the IEEE Conferenceon Robotics and Automation, Vol. 1, IEEE, Piscataway, NJ, 2002, pp. 52–59.
77Bohorquez, F., and Pines, D., “Design and Development of aBiomimetic Device for Micro Air Vehicles,” Proceedings of the Smart Struc-tures and Materials 2002, Society of Photo-Optical Instrumentation Engi-neers, Vol. 4701, edited by L. Porter Davis, Bellingham, WA, July 2002,pp. 503–517.
78McGowan, A.-M. R., “AVST Morphing Project Research Summariesin Fiscal 2001,” NASA/TM-2002-211769, Aug. 2002.
79McGowan, A.-M. R., Washburn, A. E., Horta, L. G., Bryant, R. G., Cox,D. E., Siochi, E. J., Padula, S. L., and Holloway, N. M., “Recent Results fromNASA’s Morphing Project,” Smart Structures and Materials 2002: Industrialand Commercial Applications of Smart Structures Technologies, edited byA.-M. R. McGowan, Vol. 4698, Society of Photo-Optical InstrumentationEngineers, Bellingham, WA, pp. 97–111.
80Bowman, J., Sanders, B., and Weisshaar, T. “Evaluating the Impact ofMorphing Technologies on Aircraft Performance,” AIAA Paper 2002-1631,April 2002.
81Bolonkin, A., and Gilyard, G. B., “Estimated Benefits of Variable-Geometry Wing Camber Control for Transport Aircraft,” NASA/TM-1999-206586, Oct. 1999.
82Tarascio, M., and Chopra, I., “Design and Development of a ThrustAugmented Entomopter: An Advanced Flapping Wing Micro Hovering AirVehicle,” Proceedings of the 59th Annual Forum of the American HelicopterSociety, American Helicopter Society, Alexandria, VA, May 2003.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
OL
OR
AD
O o
n Se
ptem
ber
10, 2
015
| http
://ar
c.ai
aa.o
rg |
DO
I: 1
0.25
14/1
.492
2