-
Review of riser analysis techniques
SUBRATA K. CHAKRABART! and RALPH E. FRAMPTON Chicago Bridge and
Iron Co., Plainfield, IL 60544, USA
A state-of-the-art review of the riser analysis is presented.
The papers starting with the Mohole project in early 1950 to the
present day covering the analysis of a riser are discussed. It is
shown how the earlier static analysis of the problem is supercedcd
by a more advanccd dynamic analysis with the advent of the modern
computer. Several controversial areas in the analysis, e.g., the
non- linear drag terms, the effective tension in the system, the
buoyant weight of the riser and contents, the non-linearity due to
large deformations, etc., are reviewed and the deficiencies of many
works in these areas are pointed out. A detailed deriwttion of the
horizontal equation of motion of the riser and interpretation of
the wtrious terms in the equations have been provided.
INTRODUCTION
A riser is a long slender vertical cylindrical pipe placed at or
near the sea surface and extending to the ocean floor (Fig. 1). At
the surface it is connected to a surface vessel. At the bottom it
may be hanging free or connected to a blow-out prevention (BOP)
stack (Fig. 2). Even though the word 'riser' has been used in
describing title, the problem addressed here is not limited to
risers used in the exploratory offshore drilling operations only.
It is equally applicable to production risers, OTEC cold water
pipes, single legs of a tension-legged platform, conductors
associated with a gravity drilling and production platform, etc. In
other words, the review includes any long slender vertical member
undergoing deformations due to its weight, vessel motion, waves and
current in the deep waters.
The papers reviewed in this report cover the works starting in
early 1950 for the Mohole project to the very rccent ones. The
review certainly does not include each and every paper published on
the subject, but it is intended to give a complete view of how the
technology of the riser analysis developed over the years to the
present state-of-the-art. How the earlier static analysis
progressed to the more complex dynamic analysis with the
development of more sophisticated computer procedures is discussed.
Several problem areas, e.g., the handling of the non-linear drag
term, the calculation of the buoyant weight of the submerged riser,
and the effective tension in the riser arc reviewed and the
deficiencies of several papers in these areas are pointed out.
Different methods of solution adopted by different programs and the
advantages and disadvantages of these techniques are discussed.
Other areas covercd by this review are the non- linearity of the
problem, various end conditions considered, different wave
theories, and a brief discussion of the lift force and its effect
on the riser motion.
REVIEW OF PREVIOUS WORK
In order to maintain uniformity and ease of comparison among the
different works, a uniform set of symbols will be used throughout
this paper. A definition sketch of the problem under review here is
included in Fig. I. The typical boundary conditions of a riser for
both the normal
operating condition and emergency conditions are shown in Fig.
2. The following areas will be discussed in the review of the riser
analysis: (1) derivation of riser horizontal equation of motion,
(2) effective tension and buoyant weight in the system, (3) static
versus dynamic analysis, (4) end conditions, (5) wave theories
used, (6) non-linear drag force, (7) lift force, and (8) method of
solution. A complete summary of the papers reviewed is presented in
Table I. Detailed discussion of the general eqt, ation of motion
and the derivation of the individual terms in the equation of
motion are given in the next section.
l i o r l z .
Oftslt
Riser (TToP) Tcns,c~
~avr , Force R.S(r ~'-Top Cor (SI~D Joint & [~I I do[nt
-Typ. )
D;am T M
CurrintForce --~ , ---R,strV, elgnt (R~r162 i ~ ' /)k~.~Ea, . .
. . , &(l~3tulrynO/r ~ ,d P . . . . . . . . / / !//7o,-,
-
Reciew of riser analysis techniques: S. K. Chakrabarti and R. E.
Frampton
u p,
< "d
2
8 I .
.~ o
,.. E
. . c
=~" ~.~'l
z
;E e. i~ e l
%
m.
N
E- . i
=E I-
~
o
z
fl
o
I
1. I I
I I
I I )"
N
N
I
m
I
m
m
z
N
N
A
I m
, b
~ . g o . ~ ~ =
~ E ~
~.Q-m r Ca 1~3 I:1.
t= EO m
m O n r r - ,4"ID @ 9 ~ ..4 n~ .,4 0 ~ I.~ ~
o ,.~. o , o --..., ~
I I I I
>- ~, >-
z '~ z
I I
= : Z m
14
= : 1
l i
. 4 OlO; I I I I I I
!
Ol I , , ;o ~Z t,. 9 o : - :
. _~ ~e,
' ~
t~ 0"~0
~, uc ~ c u ~
i,J q
~ q
4J~O
I
N
| !
. . . - . . J . ,
i i
, I I
' t ' o l a . . . z
r
I
E
~o
o
74 Applied Ocean Research, 1982, Vol. 4, No. 2
-
Review of riser analysis techniq.es: S. K. Chakrabarti and R. E.
Frampton
....
b
y.
E
0 ~ 0
1-
N
I i
N
N
w w
g f-
o
z Z
o o
0~3
~'~0
9 o I..
~ U
,", r- mO
0. .4
0-, '~ 0 0
0 ( J , -~ 0-0 0 I.~
0 I I
I i I J
z I )" I
I i I >"
I ~- I
I I
% , ' I
, ~ 1
~1,~ ', ~ ~ 0 ~
! !
I !
~ , ,~ I ;
!
z I z !
I
,~ . 9 , -~ 9 . : ~ o ~
g~g ~.~
i ;n I o
! I I
I I I I I
I
I
!
) -
~.~ ~'~. ,~. i : ' I
I
bd ~ . . . . . ~ ~-~u ~ o ~ - I ~ I
i I I I
I r I z I I I I I i
O 1 I
1 !
!
I
' T I
-o I +
I i
' .-3 I .o
I
I +
I ; ! m
o-
1 !
I u !
!
I I I o I
z I
' I I
e : I
z I I
I z z I
03E e w~ I
I | ) - I I I
)" I I
I , I I N I
! o
I ,
! ,
: , ,~, .~. t4 I ~ , l _ ~ ,I.
I i %
I ! !
1
z ~
I I I
i I
I
!
I I
I - i
I , ~ , U
I x ~" I I +
I K I I I I
!
t ~ I z I
I I
I I I 0 ~ J 0 I I
=-
o ; ~
Applied Ocean Research, 1982, I/ol. 4, No. 2 75
-
Review of riser analysis techniques:-S. K. Chakrabarti aml R. E.
Frampton
=
E
u
g~ g
g
E
.o , , ~ ~o~
I
!
!
I
I
%
z
C
8
14
I .
n 4 0 ~ ~
'~0
i::: .4 i::
~ 0 ~ = 0 0 -~ ~
O.~UU
0 0 ~
0 ,"r ,~
I n h
I -m I
z I z
I
i
, g
) .
|N I
I I I
I I I
I I I z
I , I ea I
z
i
I I
Ig
,- %
z
! i e l I o
I I i
I ,
-)
N
=E
m
z
z
o
(1:
I !
n ~ ~ ~ I too - -4 -.4
~,,-a o(0
~a 0 ~ )1~ -
. . ~ E ~ 0 0 ~
i i a
[ i m
z "-~ z % i i i
i i i
) - i i i
%
i ' ' i i
i
~ ~ ~.
I v ~ I
|
I z
! i I
t [ z I
I I I
z i z z z
i m 1
! I !
I I I
(z
~-~
~ ~ ~~ .~ g9 g~9
I
I
.3 c
r~
76 Applied Ocean Research, 1982, Vol. 4, No. 2
-
Review of riser amdysis techniques: S. K. Ch,krabarti am/R. E.
Frampton
.=_
&
oo
C
~o u
"~DO00 ~
~
I.~ 9 ~'~,
I I >" ->'
!
1~ -~. "~
!
I
e
I I
>;i~ N x N
I
~r.'
t !
i
!
1',?. B i
?,? I
I
I
, -~ ~
9 ~, 8 'g' ~
I
~ 0 0 ~
O~ ~
. ,40 , - I
~aaa
w
N v
Y~
ILl
I
I
I I I 1
I
. . |
-eO~ m|
o o-,~1
!
I
o
~E
o !1 ,~1
0 0 "=~ -,'~
i " - !
!~. .I.
1
I ~' "1 ~-~- ' - - - - -
1 ' ~, I > '
n I .
x ~
el | N
!
I xr. E., I f4
I
~ I~ I I
: 'B ' r
: i ~"
k
!
, . i q6~
.3 U_
m
b
Applied Ocean Research, 1982, Vol. 4, No. 2 77
-
Review of riser analysis techniques: S. K. Chakrabarti and R. E.
Frampton
"4
-
Review of riser analysis techniques: S. K. Chakrabarti and R. E.
Franlpton
DERIVATION OF RISER HORIZONTAL EQUATION OF MOTION
The equilibrium equations for a bent tubular segment and the
statically equivalent loads at its centre resulting from (1)
internal and external fluid pressure, and (2) the weight of the
segment are derived in Appendices.I, II, and III respectively. To
develop a horizontal equation of motion for a marine riser, it is
desirable to combine the three equilibrium equations as given in
Appendix I into one single equation. There are several approaches
to this task and for a better understanding of the problem and the
assumptions involved, two approaches will be given here.
In the first derivation, the form of the equations as derived
for assumption A (Appendix I) will be combined to show the form of
the riser horizontal equation of motion for large deflection and
rotation. Then, assumptions B and C (Appendix I) will be used to
reduce this equation to a form which is normally used, i.e. small
deflection and small rotation.
The equilibrium equations which include assumption A are given
in Appendix I by the horizontal, vertical, and moment equations,
equations (43)-(45). To develop a horizontal equation of motion for
the riser, the vertical equilibrium effects, equation (43), are
included in the horizontal equilibrium equation, equation (44).
Solving for the coefficient A~ and substituting in equation (44)
gives:
B l see 0 + (f.,-f=,)tan 0 +f,, -- m~,.~ =0 (1)
To include the moment equilibrium effects in equation (1), the
shear, V, is obtained from equation (45). Using the relationship
between the curvature, l/p, and the moment, M, for the case of pure
bending,
,,,: _ _ (E, dO) ds\p ] ds\ ds] (2)
The final general form of the horizontal equation of motion is
obtained from equations (2) and (47) by substituting the value of B
x into equation (1)
d 2 dO [~-~(EI-~s)-T~s]secO-(fw-f:,)tanO+m~'v:=f~
(3)
Including the expressions for the weight of the segment, i.e.
equation (86) forfw, and the loads resulting from the internal and
external fluid pressures, i.e. equation (67) as part off:, and
equation (69) as part off:~, results in:
dO [D( El-~s)-T~s]secO-[y~(Ao-A,)-f:~+f.vsinO] x
tan 0-f .v cos 0 + m~"~ =f.,~ (4)
Introducing equation (70) forf, v into equation (4) and by
combining terms and simplifying gives:
d 2 dO _ Aipl)dd~]SecO_ D,(A0_Ai) -
f:s- Ao?o + Awi]tan 0 + nl~.7 =f,, (5)
Equation (5) is the form of the riser horizontal equation of
motion which includes large deflection and large rotations.
If small deflection beam theory (equation 35) is assumed:
-ds2\ as] -(T+A~176 as luz
A ~ dx . . Ao?o+ /?d -~z+mxX=fx, (6)
Further, by assuming small angle deflections (equation 36),
equation (6) now takes the usual form as:
d2(d2x) - _ d2x - (T + AoP o [?~(A o - Ai) - - . f . - s - - dz2
EI ~z2 -AiPi)~z2 -
dx . . A oYo + AD'i] dzz + mxx =f,, (7)
To understand better tile above equation and to show the
relationship between the coefficients of the slope, dx/dz, and the
curvature, d2x/dz 2 terms, another approach to the derivation of
the horizontal equation of motion for a riser segment will be
given. In this second derivation, we will start with the form of
the equilibrium equations given in Appendix I that includes the
small deflection and small rotation assumptions, and again combine
these three equations into a single horizontal equation of
motion.
The equilibrium equations which include assumptions A through C
are given in Appendix I by equations (49)- (51). Substituting the
expression for the shear, V, from equation (51) into the vertical
equilibrium equation, equation (49), and neglecting products of
differentials, the derivative of the tension, T,, takes the
form:
dT =f.,-L, (8)
The indefinite integral of equation (8) relates the tension, T,
to the weight and vertical loading as follows~
T= "I~ + Sfwdz - ~f.flz (9)
where T, is an arbitrary cofistant of integration. Now, using
the derivative of the shear from equation (51) in tile horizontal
equilibrium equation, equation (50), and rearranging terms, the
horizontal equation of motion becomes:
822 ~, dz 2) dz T +mx.~=L~ (IO)
where the tension, T, is given by equation (9). An alternate
form ofcquation (10) is often used in which
the derivative of the second term is expressed explicitly, i.e.
using equation (8) for the derivative of tension, results in
d 2 [ d2x~ d2x dx (11)
When including the expressions for the weight of the segment,
i.e. equation (86) for fw, and the loads resulting
Applied Ocean Research, 1982, Vol. 4, No. 2 79
-
Review of riser tmalysis techniques: S. K. Chakrabarti aml R. E.
i"rampton
from the internal and external fluid pressures, i.e. equation
(73) as part off~ and equation (72) as part off:~, we note that the
tension term in equation (10)and the horizontal pressure component,
equation (73), are similar and may be combined as follows:
d2 elil i) ~] + m.~.:~ =fx~ dz2(E l~)_d[ (T+, , loPo_ F, d\"
(12)
or, using the alternate expression for horizontal pressure
(equation 71), the horizontal equation of motion becomes identical
to equation (7), in which
T=T~+I'A(Ao-A3dz-[f: ,dz (13)
For the case of most marine risers, the external loading
consists mainly of surface loads due to wave and current which
results in horizontal and vertical force intensities, f,~ and f:~.
Also, as shown by equation (13), the axial tension, T, at the
ccntre of the segment (point s) wlries continuously along the
length of the riser due to the weight of the riser itself, or may
evcn have abrupt changes caused by buoyancy modules attached to the
riser. The internal and external pressures, P~ and Po, are linear
functions of the distance from the midpoint, s, of the segment to
the free fluid surfaces. Also, because ofchanges in pipe sizes, the
quantities El, A o, and A~ may vary along the length of the riser.
Thus, a more gcneral form of equation (12) may be written
(expressing the derivative of the second term explicitly) as:
[ ] 02 02x - - ~ x Et(Z)Ez 2 - [T(z)+ Ao(z)P(z ) -
A,(z)P,(z)]-ff-~ OX
{7,[Ao(z)- A~(z)] -f:,(x,z,t) - Ao(z)7o + A,(z)Ti} ~z +
m~(z).;~ =Z~(x, z, t) (14)
where
"I'(:)= T~+~7~[Ao(z)-A,(z)]dz-~f:~(x, :, t)dz (15)
Note that partial derivatives have been used to reflect that
this may be a three-dimensional problem andthat the equation for
the horizontal motion in the )'-direction is the same as equations
(14) and (I 5) except x is replaced by y and that both x and y are
functions of both z and t (elevation and time).
To evaluate equation (15), the axial tension must be known at
some point along the riser length. If T-roe is the known tension at
the top of the riser ofe[evation zmp, then equation (I 5) may be
expressed as:
P
T(z) = "/'To v- 7~[A o(Z ) - A,(z)]dz +
"-r;vf:~(x, :, t)d: (16)
Likewise, if T,o r is the specified tension at the bottom of
the riser of elevation :Boy then equation (15) becomes:
T(z) = Tuor+ f ~,,~[Ao(z ) - A,(z)]dz-
:BOT
f f:~(.\', z, t)dz
:BOT
(17)
DEFINITION OF EFFECTIVE TENSION AND BUOYANT WEIGHT
In the deriwition of the horizontal equation of motion for a
marine riser, the vertical wall tension and the horizontal pressure
loads were combined into one term as shown in equation (12). As is
often done in riser analysis, the term within the brackets in
equation (12) is defined as the effective tension, Tr Thus, the
horizontal equation of motion may be written as:
0 2 FEI(z)O2x -] 0 [- Ox-] =I,,(x,z,tl
(a) (b) (c) (d) (18)
where
7~.(z) = T(:)+ Ao(z)Po(:)- A,(z)Pi(z) (19)
and T(z) is given by equation (15). Again, an alternate form of
equation (18) which is often
used is where the derivative of the second term is expressed
explicitly. The derivative of the effective tension becomes:
a~(z ) Oz
- - = 7~[,'1 o (Z) - ,,t,(z)] -L~(x, z, t ) - A o(Z)7o +
A,(z)7~
(20)
For the special case when there is no vertical loading, i.e.
f.~(x, z, t) = 0, the derivative of the effective tension is often
defined as the buoyant weight, w(z), of the riser. Thus, for f:~(x,
z, t)= 0
aT,.(z) 0z = w(z) = 7,[Ao(z ) - A/(z)] - Ao(z)7 o +/li(z)7 i
(21) and the horizontal equation of motion is written as:
E1(:)~-~-2 - T~(Z)~zZ -/;(z)b- ? - ~(Z)u_ " +,,~.~ =L,(x.z.0
(22)
It should be noted that the effective tension, ~(z), as given by
equation (19) has no real physical significance, but represents
only the mathematical combination of the actual wall tension, T(z),
as given by equation (15) and the horizontal load rcsuhing from the
internal and external field pressure (equation 73). These two
distinct force contributions affect the horizontal equation of
motion in a similar fashion.
80 Applied Ocean Research, 1982, Vol. 4, No. 2
-
Review of riser analysis techniques: S. K. Chakrabarti and R. E.
Frampton
Likewise, when using equation (22) for the horizontal equation
of motion, the coefficient of the slope term was defined as the
buoyant weight of the riser and contents, w(z), as given by
equation (21). Again, this term has no real physical significance,
but it is computationally correct to interpret this term as the
'distributed buoyant weight' of the riser.
The different expressions used for these terms in the papers
reviewed are listed in Columns 12 and 13 of Table 1. It should be
noted that the authors may have used any one of the several forms
of the horizontal equation of motion as previously derived.
DISCUSSION OF THE HORIZONTAL EQUATION OF MOTION
The form of the horizontal equation of motion to be discussed is
given by equation (18) in which the three terms on the left hand
side are referred to as terms (a), (b), and (c) and the right hand
side is called term (d). This equation was derived from the
consideration of equilibrium of internal forces, i.e. moment,
shear, axial tension, body weight, and externally applied loads,
i.e. f:,~ andf:~, in addition to the fluid pressure forces acting
on a deformed riser segment. It represents the partial differential
equation to be solved for the deflection curve in the X direction.
In this formulation, axial straining is not considered and the
resultant deflections and rotations are assumed small.
The terms affecting the horizontal displacement in eqnation (18)
may be interpreted as follows: Term (a) Resistance to lateral
loading resulting from
the riser's flexural rigidity, El(z). Term (b) Resultant lateral
loading due to the axial
(vertical) force, T(z), in the riser wall area plus the net
horizontal loading from the external and internal fluid pressure.
Both of these forces may add to or resist the lateral loading, f,~,
depending upon the slope and curvature of the riser segment (see
Table 2).
Term (c) Riser's inertial resistance to lateral loading. Term
(d) Applied horizontal force intensity.
Using equation (19) in term (b) and expressing the partial
derivative explicitly, further observations may be made.
~I " Ox] OZx OT(z)Ox z T~(Z)~z = T(Z)~z2-t Oz Oz 'erm(b) Term(e)
Term(O
"~2 - - - O X
4- [ A o(Z) Po(Z) -- A i(z ) P i(z)] ~z z
Term (g)
EA o(Z):r - A ~(z)Ti] ~-z
Term (h) (23)
Term (e)
T~rln (f)
Term (9)
Term (h)
The axial tension, T(z), in the riser causes lateral loading due
to the curvature, (catenary effect). The rate of change of axial
tension causes lateral loading due to the slope of the riser.
External and internal fluid pressure causes a net lateral loading
due to the curvature of the riser. The rate of change of external
and internal fluid pressure, i.e. the fluid densities 70 and
?i,
causes a net latcr~al load due to the slope of the riser.
The axial tension, T(z), may be evaluated from equations (16) or
(17) and the rate of change of axial tension, ~T(z)/~3z, is given
by equation (8) which indicates that these parameters are a
function of the weight of the riser, f,., and any vertical load
intensity,f:~. However, as shown by equation (72), these terms are
not affected by fluid pressure forces.
The riser segment in its deflected position experiences the
external forces due to waves which act normal to the segment. If
the normal component of this force is resolved into two orthogonal
axes, then one of these components contributes to the vertical load
intensity,f:~. The analyses of St. Denis and Armijo I and of
Bennett and Metcalf 18 include such a force component in the
equilibrium equations. It should be noted that these force
components are of second order under small angle assumption. The
internal fluid flow in the riser may also produce a vertical force
component contributing to f_-~.
The resulting force from internal and external fluid pressure is
horizontal assuming small deflections and rotations. Therefore,
'buoyancy' has no effect on the axial tension except at the ends of
the riser. The fact that this force is a function of the riser
curvature (term g) and a function of the riser slope (term h)
allows it to be mathematically combined with the resulting lateral
load from axial wall tension, terms (e) and (1) respectively. The
interpretation of term (b) in equation (18) appears to be a source
of some confusion in several of the papers reviewed.
Table 2 illustrates how the various components of the effective
tension Te(z), in term (b) as given by equation (23) may either add
to or resist lateral loading depending on the riser's slope and
curvature. This Table shows the direction of the resultant
horizontal load in heavy arrows assuming that the various
coefficients of the slope and curvature terms are positive.
Observations about the effects of both 'heavy mud' and axial
tension may be concluded by examining this Table.
STATIC VERSUS DYNAMIC ANALYSIS
The horizontal component of the external loading is included on
the right-hand side of equation (18). The resulting equation may,
then, be used to solve both static and dynamic riser problems.
For static riser problems, the inertia term (c) is not included
and the right-hand side of equation (18) is the horizontal load due
to drag from asteady current profile as follows:
~2x c3 ~x ~ , ~ [El(Z) ~zZ ] -~z [ T~(z)-~z ]=-2pwCo(z)Do(
")U(z)lU(z)l
(24)
where p,.=mass density of water, CD(z)=drag force coefficient
(varies with z), U(z)= horizontal component of the current
velocity.
The solution of equation (24) requires additional constraints or
boundary conditions. Typically, deflections and rotations at the
top and bottom of the riser are specified in order to model the end
restraints (e.g., fixed, pinned, free, or non-linear) or to specify
top horizontal offset.
Applied Ocean Research, 1982, Vol. 4, No. 2 81
-
Review of riser analysis techniques: S. K. Chakrabarti aml R. E.
Frampton
Table 2. Components r cffective tet,sion vs. slope and
curvature
CURVATURE SLOPE TERM (b) AXIAL TENSION HORIZONTAL PRESSURE
[ ] [ _ a=x ax a ax _ , ,a 'x aT(z ) 3x ]Ts z --az ~ Te(Z)-~- {
= "rlzJ~-~-z + az az + Aotz (z)Pi(z) -[Ao(Z)'fo ,o, "rl .0
AT : fw- IzS
+
+
+
+
I T !
...v
r'~ ~ txv
;o> o>/o = + + + = + + +
"--Z
Term (e) Term (f) Term (g) Term (h)
The initial effort in solving a riser problem has been expended
in writing computer programs based on static analysis of the riser.
Fisher and Ludwig 4 and Gosse and Barksdale 6, among others,
performed a static analysis of the riser as a variable tension beam
with current loading. Some of the later papers e.g., Tidwell and
Iifrey 7 and Kopecky 8, included both the static current loading
and a 'dynamic' time slice for wave loading. These are summarized
in Table I, Column 5.
For dynamic riser problems, the right-hand side of equation (18)
nmy include the effects of waves, drag forces due to relative water
velocity, and vessel motions. Note that the inertia of the system
includes the added mass effect. In equation (18)f~(z, t) is the
forcing function representing the above mentioned loads. For waves
it is represented by a modified form of the Morison equation in
terms of an inertia and a drag term linearly added together. The
inertia term is proportional to the normal component of the water
particle acceleration, ~,,, on a bent riser segment and depends on
an inertia coefficient. The drag term depends on a drag coefficient
and the normal relative velocity component which comprise the water
particle velocity and the velocity of the riser segment.
f~(z,t) = pwCM(z)~Dow(Z,t ) + 89 ) x
(25)
The hydrodynamic coefficients, C , and Co depend on several
non-dimensional quantities, e.g. Reynolds number and the
Keulegan-Carpenter parameter (KC) as well as the riser
configuration. Note that KC should depend on the relative velocity,
[w(z,t)-Ox/Ot]. This would require an iterative solution since the
drag force depends on KC which depends on the relative velocity.
Recent laboratory tests of different riser geometries have provided
values of C , and Co that will be useful in the choice of these
values in a riser analysis 27-29.
Sometimes the static and dynamic analyses are combined into one
equation in which the forcing function includes both the current
and the wave force. In this case, the non-linear drag force is
written in terms of a relative velocity as in equation (25), but
including the effect of the current, U as [w(z,t)-(Ox/O0-U(z)].
The dynamic analysis of a riser problem has been the subject of
study for the last seven or eight years with the exception ofone of
the earliest papers in 1955 by St. Denis and Armijo t. Numerous
papers have been published in this area. The dynamic analysis
generally includes waves and current e.g., in one of the earlier
works by Tucker and Murtha ~~ Sometimes the dynamic analysis due to
waves is done separately and superimposed onto the static solution
due to current only, e.g., as was done by Burke ~ 1, Gnone et al)
4, and Kirk et al. 26. Among others who provided solutions of the
dynamic equation of motion are Heuze 13, Sexton et al. t6, Gardner
and Kotch 17, Bennett and Metcalf t8, Maison and Lea ~9, Paulling
2~176 Chou et al. 2t, Young et al. 22, Dareing and Huang 24, and
finally,
82 Applied Ocean Research, 1982, Vol. 4, No. 2
-
Review of riser analysis techniques: S. K. Chakrabarti aml R. E.
Frampton
Krolikowski and Gay -'5. The works of Paulling and Chou et al.
arc dircctcd towards the cold water pipe of an Occan Thermal Energy
Conversion system (OTEC). For a complete listing of static vs.
dynamic analyscs for the papers reviewed, see Column 5 of Table
1.
END CONDITIONS
Various end conditions have been incorporated in the analyses.
In several analyses, the top of the riser is free, while others
assumed the top end pinned or fixed to a floating object. Likcwise
the bottom end of the riser could be free or fixed or pinned to the
bottom. Both cnds of the riser wcre considercd pinned by Fischer
and Ludwig 'L, Jones tS, Kirk et al. 23, and Dareing and Huang 2"*.
The bottom end is free for the OTEC cold water pipe analysed by
Paulling 2~176 and Chou et a/. 2t and for mining application by
Bennett and MetcalP 8. Graham et t.t[. 3 considered bottom end to
be fixed and top end to experience a harnlonic translation and
rolling. A variety of end boundary conditions are assumed by Burke
l' Heuze 13, Gnone et al. ''t, Sexton eta[. 16, Gardner and Kotch
'v, Bennett and Metcalf '8, Maison and Lea '9, Young et al. 22 and
Kirk et al. '3"26. Addilional comments about the boundary
conditions are listed in Column 21 of Table !.
WAVE THEORIES
Usually linear Airy wave theory has been used in the dynamic
analysis of the riser. This is particularly true for a frequency
domain analysis. The analyses of Gardner and Kotch 17 and Maison
and Lea ~9 include Stokes' fifth order theory. A summary of the
wave theories used is listed in Column 20 of Table I. Several
people have considered random waves in their analysis including
Tucker and Murtha I~ Sexton et al. ~6, Young et al. 22 and
Krolikowski and Gay 25. Unlike Tucker and Murtha who have used a
random wave system for computing riser response spectra, Sexton et
al. used the random wave input in a time domain. Column 17 of Table
I indicates those papers that have included wave force
computation.
NON-LINEAR DRAG FORCE
One of the most difficult areas in tile equation of motion has
been the fluid dynamic drag force. Being non-linear, the drag force
can only be handled without modification in a numerical time domain
analysis. In terms of the relative velocity it is given as,
i)x ] ~x[ L,~:, t)=89 t)- ~ 31"(:, t)--S{ (26)
in which w=normal component of the water particle velocity. In
the case of static analysis, w will become the current velocity, U.
Somctimcs, U and w are combined as relative velocity to describe
the complete riser motion analysis, e.g. Kirk et al. z6 and
Krolikowski and Gay 25. In a simplificd analysis, particularly in a
frequency domain where harmonic solutions are sought, the drag
force is linearizcd. An approximate equivalent form in this case
is:
f~o(z, t)=~p,,.Co(z)Do(z)ff[w(z, t ) - ~-~]
(27)
in which ~.=mean value of the rclative velocity. For example,
assuming
w= Re lWo(z)e""} (28)
and
x = Re [Xo(Z)e "'''+ "~} (29)
in which wo=amplitude of w, Xo=amplitude of x and = its phase
angle, it can be shown by Fourier analysis
that:
8 I~'= ~- Iwo - itoxoei'l (30)
Another equivalent linearization approach generally used in the
frequency domain analysis was introduced by Borgman 3~ It consists
of writing the (relative) velocity squared term as the (relative)
velocity term multiplied by a factor x/8/r~ and the rms value of
the velocity. Tung and Huang 3t cxtended this technique to include
current and wrote expressions for the linearized drag force as well
as modified wave energy density spectrum in the presence of
current.
LIFT FORCE
In the dynamic analysis, the motion of the riser in the presence
of tile waves (and current) will introduce the formation of a wake
region near the riser and shedding of vortices from the surface of
the riser. This, in effect, will introduce a force at right angles
to the plane ofthe motion of the riser. In a three-dimensional
problem e.g., with multidirectional waves and current, it is quite
difficult to introduce this effect, in a two-dimensional motion,
however, this transverse forcc can be computed and introduced as a
transverse vibration. The force on a unit length of the structure
due to a normal water particle vclocity, w, is given by:
f}. = 89 (31)
depending on a lift coefficient, Ce Owing to the motion of the
structure, a lift force on the unit length of the form:
f~. = }p,,.C t~z, t)Do(z)5:2(z) (32)
is generated where 5.(= ~3xlg;t)= velocity of the centre of tile
segment in tile x direction. In general, these two forces depend on
differcnt values of Ct: I lowcvcr, considering an eqnivalent single
value of C~, a lift force in terms of the relative velocity may be
written as:
fr = 89 dz, t)Do(z)(w-.;;)2 (33)
in which CL, now, depends on the relative velocity, w-.~. Since
the lift force is, gcncrally, irregular in nature, the value of
Ct.will vary in a wave cycle. Howevcr, the lift force may be
approximatcd in terms of the most predominant frcqucncy of the lift
force in which case, Ct. may bc
Applied Ocean Research, 1982, Vol. 4, No. 2 83
-
Review of riser analysis techniques: S. K. Chakrabarti and R. E.
Frampton
SPATIAL .r TECHNIQUE TEI~PQRAL r TECHNIQUE I I I
DYNAMIC -OL'N TYPE I I
ANALYTICAL
R D E ~ (A.D.) roi~ i~lsk R
DISPLACEMENT NUMERICAL (FD, NI,FE)
STATIC ANALYSIS
TEMPORAL $OL'N.
DIRECT INTEGRATION TIHE HISTORY , SSOLU' | ION ~ / (FD.N,) - -
(T ' , )
rN~.r ~ . /2 - - DE T E ST IC - -~_ E . . . . . ~OD~T.~9 .
ELIMINATE
1" .'TA 'ISF() - M AT I0 N --I~ TiME FREQUENCY 0r A IN (M T.) \
RM (SS.TF) (FD)
NON'DETE INISTIC--SPECTRAL RANEK~IVI VIBRATIONS ANALYSIS
(RV)
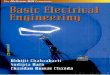
DYNAMIC A NALY~.I S _1 (NOTE: NOTATION IS GIVEN IN TABLE 1)
Figure 3. Methods of static aml dynamic analysis
- I
assumed constant over the cycle. Once the form of the lift force
is known, a vibration analysis transverse to the wave direction may
be set up. Thus, the two equations (transverse and inline) may be
solved simultaneously and the resulting riser forces may be used
for a more complete stress analysis. None of the papers have
included the effect of the lift force in the stress analysis of the
riser. Young et al. 22 make a note ofthis effect, but do not show
an analysis including this phenomenon.
METHOD OF SOLUTION
The basic form of the differential equation to be used for
dynamic riser problems is given by equation (18). The static
analysis involves finding the riser deflected shape for a constant
load distribution on the riser, (spatial solution to equation
(24)). The dynamic analysis requires finding the deflected shape
(spatial solution of equation (18)) for a time varying load
distribution acting on the riser (temporal solution to equation
(18)). Table 1 shows the techniques used by the references listed
for both the spatial solutions (column 8) and the temporal
solutions (column 9). The various methods used for the static and
dynamic analysis of risers are summarized in Fig. 3.
The techniques for the spatial solution of either the static
equation, equation (24), or the dynamic equation, equation (18),
are numerous but may be placed in two major categories; analytical
methods and numerical methods.
The analytical methods are limited in that the geometry of the
riser must generally be uniform along its length. One procedure,
often used, is to assume a mathematical form. for the deflection
solution of the riser. This procedure was used,by Fischer and
Ludwig* and Dareing and Huang 24 who assumed the deflection to be
in a form of an infinite series and by Kirk et al. z3 who assumed
the deflection to be a sinusoidal series. Another approach is to
assume that deflection of the riser is similar to structural
components for which solutions exist. This was done by Jones I s
who assumed the deflection to be that ofan elastic catenary. Also,
for their dynamic riser analysis Graham et al. 3 assumed that the
deflection behaves as a constant tension beam at either end and a
variable tension cable in the middle. A normal mode method
(modalsuperposition) has been used by Kirk et al. 23'26 and Dareing
and Huang 2"~.
The numerical methods for the spatial solution of equation (18)
are more general in that they allow for changes in geometry, i.e.
riser size, buoyancy modules, etc. and non-linear end restraints.
The two main approaches
often encountered are (1) direct solution of the partial
differential equation by numerical approximations, and (2) finite
element idealization resulting in matrix solution methods.
One numerical procedure for the direct solution is the finite
difference technique. This approach leads to a set of simultaneous
equations which are banded but not necessarily symmetric. Often the
boundary conditions require iterative procedures. Butler et al. 5,
Gosse and Barksdale 6, and Tidweil and Iifrey 7, and Kopecky s use
this approach for their static analysis, while Tucker and Murtha 1~
Sexton and Agbezuge 16, Bennett and Metcalf Is, Chou et al. 21, and
Young et al. 22 use the same procedure, i.e. finite difference, for
the spatial solution in their dynamic analyses. Another procedure
for the direct solution is numerical integration as was done by
Burke t 1. Both the finite difference and the numerical integration
procedures are better suited to solve two-dimensional riser
problems.
The second numerical method is the finite element procedures. In
this approach, the riser is modelled by variable tensioned beam
elements with discrete degrees of freedom as unknowns at the
connection points of the elements. This results in a set of
simultaneous equations that is both banded and symmetric9 Computer
procedures are well established to solve these equations as well as
to determine the natural periods of the system. This method is well
suited to three-dimensional problems and may be used to include
large deformations (see Column 7, Table 1) of the riser. Bathe and
Wilson 12, Heuze 13, Gnome et al. 1., Gardner and Kotch aT, Maison
and Lea 19, and Paulling 2~ use this approach in their
analysis.
The solution of the dynamic riser problem with time dependent
loads falls into two main categories: deterministic (time and
frequency domains) and non- deterministic solutions (stochastic).
These dynamic solution types are shown in Column 10 of Table 1. The
method of solution (temporal solution technique) is given in Column
9 of Table 1.
Deterministic solutions include both the time domain (time
history analysis) and the frequency domain analysis. The time
history analysis is more general in that the time dependent loads
may be non-linear (as is drag) and variation in buoyancy near the
surface may be included. The numerical procedure to step through
time may be the finite difference technique as used by Sexton and
Agbezugc ~6 and Maison and Lea 19, or the numerical integration
technique as used by Heuze 13, Gnone et al. ~4, Gardner and Kotch
~7, Bennett and Metcalf IB, and Chou et al. 21. The disadvantage of
time history analysis is that
84 Applied Ocean Research, 1982, Vol. 4, No. 2
-
Review of riser amdysis techniques: S. K. Chakrabarti aml R. E.
Frampton
usually long computer runs are necessary. For frequency domain
solutions, wave loading and
vessel motion are assumcd to be harmonic which allows for a
direct sinusoidal steady-state solution. This approach has the
advantages of being more suitable for fatigue analyses and
involving shorter computer rnns. However, non-linear loading (drag)
must be linearizcd and the response appears to be sensitive to
minor changes in the wave spectra. Graham et al. 3, Burke ~ ~,
Paulling 2~ Young et al. 22, and Kirk et al. 23'26 solve the
dynamic riser problem in the frequency domain.
The non-deterministic approaches to solving the dynamic riser
problem include the procedure of modal superposition (random
vibration). Time dcpcndent loads (including drag) must again be
linearized and the interpretation of the results is a more
difficult task. Tucker and Murtha t~ have used this approach.
CONCLUSIONS A state-of-the-art review of the riser analysis
techniques has been made. The papers included in this review are
not claimed to be a complete list, but illustrates how the earlier
static analysis progressed to the more sophisticated and complex
dynamic analyses with the advent of modern computers. A general
equation of motion for a riser is derivcd from a basic bent riser
element and it is illustratcd how the controversial tcrms, e.g.,
the effective tension and buoyant weight are derived. Various
non-linearities in the problem are discussed. Expressions
appropriate for large angle of deflcction and large deformation
have been shown. Different analysis techniques employed by various
investigators in a riser analysis have been discussed.
A comparison of six different analysis methods including time
and frcquency domain analysis of a riser has been made by Egeland
and Solli 32. They have provided results on the sensitivity of
these different techniques. In a recent API report 33, numerical
results from eleven diffcrcnt computer pi'ograms on dynamic riser
analysis have been compared. The results are found to be in general
agreement among the w~rious programs. These programs, however, have
not been tested against field measurement. It is recommended that
such test programs be undertaken in an ocean environment so that
more confidence may be gained in these and other computer
programs.
NOMENCLATURE
A = nD~/4 [B] = damping matrix Co=drag coefficient CL= lift
coefficient
C.~ = inertia coefficient Do =diameter of riser
EA(z)=axial rigidity of riser (varies with Z)
El =flexural rigidity of riser F=external force on riser f=
force density
E(z)l(z), El(z)=flexural rigidity of riser (varies with Z)
[tr}=nodal point force vcctor equivalent to the element stresses
at time t
[K,.] =elastic stiffness matrix
At= Tlo p =
"r,.(z), T(z) [Table 1] =
[Ko] = geometric stiffness matrix (differential matrix) which
takes into account the tension of the structure in the static
cqnilibriunl configuration
[tK] = tangent stiffiless matrix at time t re=constant mass
including riscr
and contcnts re(z) = total mass of riser and contents
(varies with Z) m*(z) = total mass of riser and contents
including virtual mass (varies with Z)
M = moment of force [M] =constant mass matrix [A/'~] =
structural mass matrix [M~.] = virtual mass matrix
P=pressure on the riser from fluid ~tt +AtR} = external load
vector applied at
time t + At time incremental time stcp top riser tension
effective tension = Ttop- buoyant wcight of riser and contents (7"
not defined)
T(z, t)=same as T(Z) but also varies with time, t
T~(z, t) = cffective tension = Top- buoyant weight of riser and
contents+vertical wave inertia forces (varies with Z and t)
T*(z) = effective tension = 7~o o - buoyant wcight of
riser-inertia loading of the drilling mud velocity (varies with
Z)
T~ =constant riser tension- inertia loading of the drilling mud
velocity
[u} = vector of nodal point displacement increments from time t
to time t+At (total) displacement for linear analysis)
'd't} = vector of nodal point velocities It + At,.,} = vector of
nodal point velocities
at time t + At [ii} = vcctor of nodal point
accelerations It +Ate} = vector of nodal point
accelerations at time t+At U =current velocity
U: = axial riser displacement V= shear force w=constant buoyant
weight of
riser and contents or normal water particle velocity
w(z)=buoyant weight of riser and contents (varies with Z)
w(z, t)=buoyant weight of riser and contents (varies with Z and
time)
X =global horizontal axis (used for 2-D analyses)
Y=global horizontal axis (used for
Applied Ocean Research, 1982, Vol. 4, No. 2 85
-
Review of riser analysis techniques: S. K. Chakrabttrti aml R.
E. Frampton
Subscripts
3-D analyses with X axis) Z=globa l vcrtical axis with
assumed origin at the mud line and being posit ive upward
p = radius of curvature p . . . . mass density of water 70 =
weight densi ty of outer fluid ;,'~ = weight density of inner fluid
;,'~ = weight density of riser mater ia l
0 = refers to outer region of riser i= refers to inner region of
riser
w= refers to weight s = refers to segment of riser n = refers to
normal d i rect ion
REFERENCES
I St. Denis, M. and Armijo, L. On the dynamic anal)sis of the
Mohole riser, Proc. Ocean Sci. Ocean Eng. Cm~, Oslo, 1955
2 NESCO Report: Structural Dynamic Analysis oJ the Riser and
Drill Striml for Project Mohole, National Engineering Science
Company, Pasadena, December 1965
3 Graham, R. D., Frost, M. A. and Wilhoit, J. C., Anal)sis of
the motion of deep-water drill strings - - Part 1: Forced lateral
motion --and Part 2: Forced rolling motion, J. Eng. Ind. Trans.
ASME, 1965, (May), p. 137
4 Fischer, W. and Ludwig, M. Design of floating vessel drilling
riser, J. Petrol. Tedmol. 1966. (March), p. 272
5 Butler, II. L., Delfosse, C., Galef, A. and Thorn, B. J.
Numerical analysis of a beam under tension, J. Struct. Die., Proc.
,4SCE, 1967, (October), p. 165
6 Gosse, C. G. and Barksdalc, G. L. The marine riser - - a
procedure for analysis, Offshore Technol. Cm~, IIouston, 1969,
Paper no. OTC 1080
7 Tidwcll, D. R. and Ilfrey, W. T. Developments in marine
drilling riser technology, ASME Paper no. 69-PET-14, September
1969
8 Kopccky, J. A. Drilling riser stress measurements, ASME Paper
no. 71-PET-I, 1971
9 Morgan, G. W. Riser Dynamic Analysis, Sun Oil Co., Production
Research Laboratory Report 7320-71-14, 1972
10 Tucker, T. C. and Murtha, J. P. Nondeterministic analysis of
a marine riser, Offshore Technol. Conf, tlouston, 1973, Paper no.
OTC 1770
I I Burke, B G. An analysis of marine risers for deep water,
oJJ~hore TechnoL Co~, ttouston, 1973, Paper no. OTC 1771
12 Bathe, K., Wilson, E. L. and Iding, R. !I. NONSAP -- a
structural analysis program for static and dynamic response of
nonlinear systems, Report no. UC SESM 74-3, University of
California, Berkeley, February 1974
13 lleuze, L. A. A 4000 ft riser, Offshore Teclmol. Col~,
ltouston, 1975, Paper No. OTC 2325
14 Gnone, E., Signorclli, P. and Giuliano, V. Three-dimensional
static and dynamic analysis of deep-water seelines and risers,
Offshore Technol. Cot~, Ilouston, 1975, Paper no. OTC 2326
15 Jones, M. R. Problems affecting the design of drilling
risers, SPE paper 5268, London, April 1975
16 Sexton, R. M. and Agbezugc, L. K. Random wave and vessel
motion effects on drilling riser dynamics, Offshore Teclmol. Col~,
llo,~ston, 1976, Paper no. OTC 2650
17 Gardner, T. N. and Kotch, M. A. Dynamic anal)sis of risers
and caissons by the element method, Offshore T~,chnol. Col~,
llousto,, 1976, Paper no. OTC 2651
18 Bennett, B. E. and Mctcalf, M. F. Nonlinear dynamic anal~,sis
of coupled axial and lateral motions of marine risers, Offihore
Technol. Cot~, Ihmston, 1977, Paper no. OTC 2776
19 Maison, J. R. and Lea, J. F. Sensitivity analysis of
parameters affecting riser performance, Offshore Technol. Cm~,
Ilouston, 1977, Paper no. OTC 2918
20a Paulling, J. R. ,-I Lineari:ed Dynamic Analysis of the
Coupled OTEC Cold-Water Pipe and IIAfB-I Barge System Morris
Guralnick Associates, Inc., August 1977
20b |'aulling, J. R. Frequency domain analysis of OTEC CW pipe
and platform dynamics, Proe. Ilth OJf~hore Teclmol. Cot~, Ihmston,
1979, Paper no. OTC 3543, III, 1641
21 Chou, D. Y., Minner, W. F., Ragusa, L. and Ho, R. T. Dynamic
analysis of coupled OTEC platform - - cold water pipe system,
Offshore Technol. Cot~, ilouston, 1978, Paper no. OTC 3338
22 Young, R. D., Fo~der, J. R., Fisher, E. A. and Luke. R. R.
Dynamic analysis as an aid to the design of marine risers, J.
Pressure Vessel Teclmol., Trans. ASME, 1978, (May], 200
23 Kirk, C. L, Etok, E. U. and Cooper, M. T. Dynamic and static
analysis of a marine riser, Appl. Ocean Res., 1979, I, 125
24 Dareing, D. W. and lluang,T. Marine riser vibration response
by modal analysis, J. Energy Resource Technol., AS,tIE, 1979, 101,
159
25 Krolikowski, L. P. and Gay, T. A. An improved linearization
technique for frequency domain riser analysis, Proc. Twelfth
Off'shore Technol. Cot~, Houston, 1980, Paper no. OTC 3777, II,
341
26 Etok, E. U. and Kirk, C. L. Random d)namic response of a
tethered buoyant platform production riser, Appl. Oeean Res., 1981,
3, 73
27 Loken, A. B. et al. Aspects of hydrodynamic loading in design
of production risers, Proe. Elercnth Offshore Technol. Co~,
tlouston 1979, Paper no. OTC 3538, III, 1591
28 Sarpkaya, T. tlydrodynamic forces on various multiple tube
riser configurations, Proc. Elerenth Offshore Tecl, nol. Co~,
tlouslon, 1979, Paper no. OTC 3539, I!1, 1603
29 Hanscn, N. E., Jacobsen, V. and Lundgren, H. H)drodynamic
forces on composite risers and individual cylinders, Proc. Eleventh
Offshore Technol. Col~, llouston, 1979, Paper no. OTC 3541, I!!,
1607
30 Borgman, L. E. Spectral analysis ofocean x~a~e forces of
piling, J. Waterways Ilarbors Dir., ASCE, 1967, 93, (WW2), 129
31 Tung, C. C. and Iluang, N. E. Combined effects of current and
waves on fluid force, Ocean Eng., 1973, 2, 183
32 Egeland, O. and Solli, L. P. Some approaches to the
comparison of riser analysis methods against full-scale data, Proc.
Twelfth Offshore Technol. Cot~, tlouston, 1980, Paper no. OTC 3778,
I!, 355
33 APt, Comparison of Marlin, Drilling Analyses, American
Petroleum Institute, Bulletin 2J, 1977
APPENDIX I
Eqttilibritmt equations Jbr a bent tubular segment
Most mar ine structures being built today have tubular members
as some or all of its structural components . These members are
often used in the convent iona l sense to resist the appl ied
forces and to t ransmit loads in the structure by their bending,
shear, and axial stiffness. However , in many appl icat ions the
buoyancy force created f rom a difference between internal and
external pressure is used for overal l structure stabil ity or to
reduce the loads in the individnal members. It is impor tant ,
therefore to understand the equi l ibr ium of a curved (bent)
tubular segment as shown in Fig. 4.
For the purpose of this der ivat ion, it will be assumed that
the segment is bent in one plane only (the X-Z plane) and that mot
ion occurs only in the +X direct ion. It can be shown that the
equat ions of mot ion may bc der ived independent ly for the two or
thogona l vert ical p lanes and that coup l ing is int roduced by
means of the external forces only.
The general form of the equat ions in the X and Z direct ions
and [he moment cquat ion will be der ived first, then approx imat
ions will be made in succession using the fo l lowing assumpt ions:
(A) The length of segment is small so that
cosd0- ~ ! and s ind0"- -d0 (34)
86 Applied Ocean Research, 1982, Vol. 4, No. 2
-
Review of riser analysis techniques: S. K. Chakrabarti and R. E.
Frampton
/
vo~ "2"
.* F/S" * ~,~
FI~ ' W - - _ - rx$ FIs dO
aV 2
" "~.."-....] ae ~ \ e.d--- e
T_! . T ~' e .de r
~ X
Similarly, the horizontal equilibrium equation becomes:
A sin 0 + B cos 0 + F~ - m~.~ds = 0 (41)
in which m~, = mass of the segment including added mass per unit
length acting in the X direction; '~ = acceleration of point s in
the X dircction [.~ =(02x/i}t2)]. The moment equilibrium eqt, ation
is:
dT( , - cos d~O-) + d M + 2 Vsin d-if- = 0 (42)
Considering the length of the segment to be small, equation
(34), the three equilibrivm cquations respectively are :
Figure 4. Free body diagram of a bent tubuhu" segment A~ cos0-Bt
s in0- f , .+f : ,=0 (43)
(B) Small deflection beam theory is applicable. Then
sin0 ~-dx cos0-~ ds and (35)
(C) Angle of deflection, 0, is small, i.c.
- dv ds-~dz, cos 0" 1, sin 0" 0"--'"
dz
dO d2x and dzz "" d---2 ~2- (36)
As shown in Fig. 4, the length ofthe segment is ds with a radius
ofcurvature p and a mid-point slope of 0. At both ends of the
segment, the internal member forces, i.e. the shear, moment, and
axial forces are shown iV, AI, T respectively). The resultant of
all the external loads are shown at the midpoint of the segment
(point s) as F.,~ and F_.,. A portion of these resultant loads is
from the distributed internal and external pressure forces. Also,
acting at point s is the resultant member weight, F,.. The
cquilibrium of the internal member forces and the resultant loads
acting on the segment at point s provides the following cquation
for the vertical equilibrium:
At sin0+B, cos0+f,s-m~,.~=0 (44)
dA! d--~-~ + V = 0 (45)
in which
dT vdO (46) AI = ~s- ds
dV ,,dO Bt = ds + 1 ~ss (47)
while f,.,f:s and f~s are the weight and force intensities
(force per unit length).
Next, if the small deflection beam theory, equation (35), is
applied, then the quantities sin0 and cos0 in the horizontal and
vertical equilibrium cquations are replaced by dx/ds and d-/ds
respectively. Finally, assuming small angle deflection, equation
(36) and using the following relation between the moment and
curwtture for pure bending,
M=E1 = EIdO d2x (48)
and neglecting products of differentials as second order, the
following final forms of equilibrium equations are derived.
(37) Fw+F.s=0
which reduces to:
A cos0- B sin 0 - F,,.+ F:, =0 (38)
where,
A = dTcos d~- 2 Vsin d~-~ (39)
Vertical Jbrce equilibrium
dTd_ dzd (v~z)-f"+f:~=O
llori-ontal force equilibrium
d[ dx\ dV ..
Moment equilibrium
(49)
(50)
d [ . d2x\ I" ~ t " :1~) + =0 (511
Applied Ocean Research, 1982, Vol. 4, No. 2 87
-
Review of riser analysis techniques: S. K. Chakrabarti amt R. E.
Frampton
47
m x
Figure 5. Extermd pressure distribution on a bent tubular
segment
APPENDIX 11
Interred aml extermd fluid pressure on a bent tubular seyment -
- statically equivalent loads
The statistically equivalent loads due to external pressure will
be derived first, and then the results for internal pressure become
obvious. Consider the bent tubular segmcnt shown in Fig. 4 to be
exposed to external fluid pressure as shown in Fig. 5. The
variation of pressure is linear with z. A small incremental area,
d,,l o, upon which the external pressure, Po, may be assumed
constant, will be used to derive an expression for the incremental
force, dFo.
The exposed surface area, dA o, upon which external pressure
acts, is:
Do[ Do dAo =-~-(p + -~-cos (p)d~(d(p (52)
in which Do=outside diameter of the tube; tp=angle around the
cross-section of the tube measured counter- clockwise from the
negative X-axis. The pressure, Pc, at the centre of the tube where
the normal to the centre of the area, dA o, intersects the axis of
the tube (point C) is:
P, = Po - 7oP(sin ~ - sin 0) (53)
in which /5o=external pressure at the elevation of the centre of
the cross-section (point S); 7o=density of the external fluid. The
pressure, P0, at the outer surh~ce of the incremental areas is:
/5 Do 1"o= ~-7o-rCOS~osin~ (54)
or, using equation (53)
Po = Po - 7op(sin = -s in 0)- 89 cos ~o sin (55)
The differential force, dFo=PodA0, on the area then becomes
(using equations (521 and (55))
dFo = {~pDo[Po - 7op(sin a - sin 0)] +
]D~[Po - 7op(2 sin ~- sin 0)]
cos r sin o~ cos 2 ~p}d~dq~ (56)
The global components of this differential force are:
dF.,o=dFocos~p cos~ (57)
dF,.o=dFosinq~ (58)
dF.o= -" IF o cos ~p sin ct (59)
Integrating dF~o in the tp and ct directions gives the total
force acting in the global X direction, Fxo, due to external
pressure
O+ldO,'21 2n
~ =0- [d0 ,21 4 ,= 0
(60)
Using equations (56) and (57), and integrating with respect
to
-
Review of riser analysis techniques: S. K. Chak,'aba,'ti and R.
E. Frampton
Fri = 0 (65)
(66)
in which Ai=nD~/4=inner cross-sectional area of the tube;
D~=inside diameter of the tnbe; P~=internal pressure at the
elevation of the centre of the cross-section (point s); "/~
=density of the internal fluid.
The total global load components due to internal and external
fluid pressure may be expressed by combining equations (61) and
(64) for F,p, equations (62) and (65) for Frp, and equations (63)
and (66) for F._ v. By considering the length of the segment to be
small, i.e. dO small, the approximations ofcquation (34) may be
made. With these approximations, the global components of the
statically equivalent forces due to internal and external pressure
may be expressed as the components of the force intensity, f,v,f~v,
and f.-p, or
fxp Lv = ~- =f,p cos 0 (67)
F).p f r , - ~ = 0 (68)
fzp f--v = ds - -f.v sin 0 (69)
respect to z are equal to (the negative of) the corresponding
fluid densities, the expression for the horizontal component of the
pressure may be written as
d ~ ~ dx f~p=dmz[(Ao ! , , -A i l i)~:~ (73)
Next, to examine the moment due to extcrna[ pressure, the global
components, Xo, Yo, Zo, of the distance from point s to the centre
of the differential area, dAo, are nccdcd. F'igure 5 shows a new
coordinate system (x~, A, z~) with origin at point s and parallel
to the original coordinate system (X, K Z). With reference to tiffs
new coordinate system, the global components (Xo, Yo, Zo) may bc
written as:
Do Xo =/,(cos 0 - cos ~) - T cos ~ cos q~ (74)
O 0 . Yo = - ~- sm ~p (75)
Do z o = p(sin ~ -- sin 0) + ~ sin ~ cos (76)
Now, using the global components (dF ..... dFro, dF:,,) of the
differential force acting on the area, dA o, the moment may be
expressed as follows:
Differential moment about the x, axis
in which p was replaced by ds/dO and dM.,~o = J'odF:o- zodFro
(77)
- - dO f.v = (A o!'o - AiPi) ~ -(AoTo - AiTi) sin 0 (70)
DiJferential moment about the y~ axis
dM ~.~,, = - xodF:o + zodF.~o (78)
Examining Fig. 5 and equation (70) it is observed that the
hydrostatic load contribution resulting from the positive
curvature, dO]ds, opposes the hydrostatic load contribution
resulting from the positive mid-point slope, 0, of the segment for
both the internal and external fluid. If the curvature of the
segment is negative (bent in the opposite direction as that shown
in Fig. 5) while still maintaining a positive mid-point slope, the
hydrostatic load contribution from either internal or external
fluid pressure are additive. In all cases the hydrostatic load due
to the internal fluid opposes the hydrostatic load from the
external fluid.
If small dellection beam theory and small angle of deflection
are assumed and if the terms with the products of differentials are
neglected, the statically equivalent pressure loads become:
Differential moment about the z~ axis
dM:~o = - xodFro + 3'odF~o (79)
The expressions for the differential moments due to internal
pressure are similar to equations (77)-(79) except for a change in
sign. The total moment about each of the coordinate axcs (x~, 3'~,
z~) at point s is then found by integrating the above expressions
in the cp and directions. The final expressions combining the
moments due to external and internal pressures are
M~ v =0 (80)
Mysp = (/1o7o- Ai7i)t'2( sin d0- dO) cos 0 (81)
d2x dx f~p=(AoPo-- AiPi) ~z_ --(Ao;.o-- AiTi)-~z (71)
f_.p = 0 (72)
Noting that tile pressures Po and Pi are linear functions of z
and therefore the derivatives of these pressures with
Al :~p=0 (82)
By considering the length of the segment to be small, i.e. dO
small, the approximations of equation (34) may be used. Then,
M~.,p=0 (83)
Applied Ocean Research, 1982, l~l. 4, No. 2 89
-
Review of riser analysis techniques: S. K. Chakrabarti and R. E.
Frampton
/ Figure 6.
,x4 .-:/-. _~.t( II
( 4 '1co~,Co~r ~. "I" o
x
Weight of a bent tubular segment
APPENDIX III
Weight of a bent tubular segment - - statically equivalent
loads
For the statically equivalent weight of the bent tubular
segment, consider the tube as shown in Fig. 6. The differential
volume, dV, is again bounded by the angles d~ and dtp on the wall
of the tubular segment. However, because the tube is bent and the
elements on the convex side suffer extension and those on the
concave side compression, the wall thickness of each differential
volume is different (increasing in the direction of the positive
local X axis). As in the case of pure bending, each transverse
section of the tube, originally plane, is assumed to remain plane
and normal to the longitudinal fibres of the tube after bending.
Then, the elements lying on the neutral axis (local ~'axis) do not
undergo straining during bending. Thus, the volume computed for a
differential element lying on the neutral axis (local Yaxis) will
be the same for all of the elements around the cross section.
The differential volume, d V, as shown in Fig. 6 is then
1 2 d V= ~(Do - D2~)pd~td9 (84)
The incremental weight, dFw, is:
in which 7~ = weight density of the tubular wall. The total
statically equivalent weight, Fw, is then found
by integrating dFw in the tp and ct directions, which gives
f,.= ~s =7,(Ao- A,) (86)
Next, to determine the statically equivalent moment due to
weight of the tube, the global components, x,,, and Yw, of the
distance from point s to the centre of the differential volume, d
V, are needed. Again referencing the (x,, 3'5, z,) coordinate
system with origin at point s, the global components, xw and Yw,
may be written as (see Fig. 6):
, {Do+D, 'X xw=p(cos 0 -cos cq -k~)cos 0c cos tp (87)
['Do + Di'~ 9 y, . . . . k~ js 'n ~o (88)
The moment of the weight, dF,,,, of the differential volume may
be expressed as -y ,dFw about the x~ axis, as xwdF w about the y~
axis and as
dM .... =M .... =0 (89)
about the z~ axis. The total moment about the x~ axis is:
O+dO]2 2n
:~=O-IdO/2) 4~ = 0
which on integration with respect to tp results in
Mx~,.=0 (91)
Similarly, on integration the total moment about the ),~ axis
is:
Mr~.,='A(Ao-A,)p2(dO-2sind~O2)cosO (92)
By considering the length of the segment to be small, i.e. dO
small, the approximations of equation (34) give:
dFw=?~dV (85) Mr~w = 0 (93)
90 Applied Ocean Research, 1982, Vol. 4, No. 2