Embed Size (px)
Citation preview
10/19/2011
1
Solving Systems of Equations
“Numerical Methods with MATLAB”, Recktenwald, Chapter 8and
“Numerical Methods for Engineers”, Chapra and Canale, 5th Ed., Part Three, Chapters 9 to 11 and
“Applied Numerical Methods with MATLAB”, Chapra, 2nd Ed., Part Three, Chapters 8 to 12
PGE 310: Formulation and Solution in Geosystems Engineering
Dr. Balhoff
1
Solving Systems of Equations
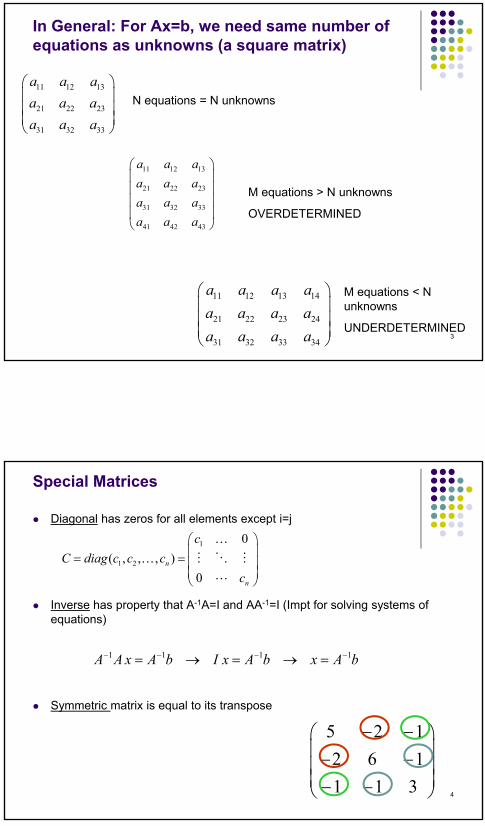
Many Science & Engineering problems require the solution to systems of equations
General Rule: Need as many (unique) equations as unknowns
Guide to putting equations in Natural Form:1. Write the equations in their natural form
2. Identify Unknowns, and order them
3. Isolate the unknowns
4. Write Equations in Matrix form (Ax=b)
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
n n
n n
n n nn n n
a x a x a x b
a x a x a x b
a x a x a x b
Ax b
2
10/19/2011
2
In General: For Ax=b, we need same number of equations as unknowns (a square matrix)
11 12 13
21 22 23
31 32 33
a a a
a a a
a a a
11 12 13
21 22 23
31 32 33
41 42 43
a a a
a a a
a a a
a a a
11 12 13 14
21 22 23 24
31 32 33 34
a a a a
a a a a
a a a a
N equations = N unknowns
M equations > N unknowns
OVERDETERMINED
M equations < N unknowns
UNDERDETERMINED3
Special Matrices
Diagonal has zeros for all elements except i=j
Inverse has property that A-1A=I and AA-1=I (Impt for solving systems of equations)
Symmetric matrix is equal to its transpose
1
1 2
0
( , , , )
0n
n
c
C diag c c c
c
5 2 1
2 6 1
1 1 3
4
bAxbAxIbAxAA 1111
10/19/2011
3
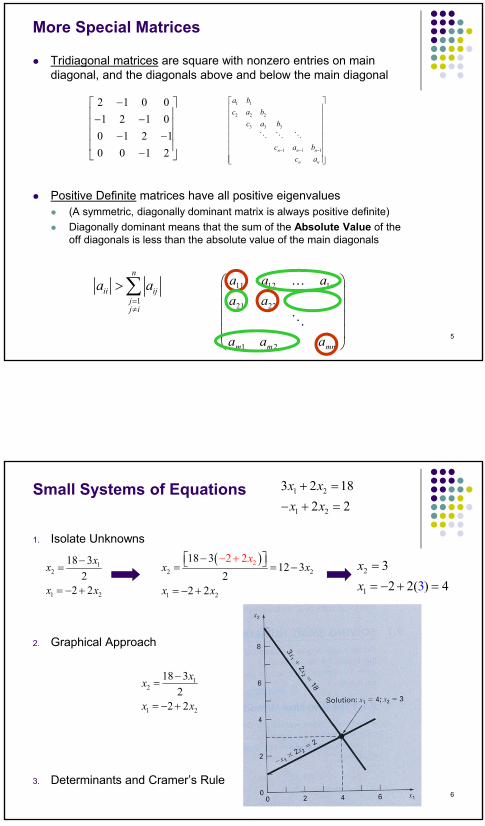
More Special Matrices
Tridiagonal matrices are square with nonzero entries on main diagonal, and the diagonals above and below the main diagonal
Positive Definite matrices have all positive eigenvalues (A symmetric, diagonally dominant matrix is always positive definite)
Diagonally dominant means that the sum of the Absolute Value of the off diagonals is less than the absolute value of the main diagonals
1
n
ii ijjj i
a a
11 12 1
21 22
1 2
n
m m mn
a a a
a a
a a a
2 1 0 0
1 2 1 0
0 1 2 1
0 0 1 2
1 1
2 2 2
3 3 3
1 1 1n n n
n n
a b
c a b
c a b
c a b
c a
5
Small Systems of Equations
1. Isolate Unknowns
2. Graphical Approach
3. Determinants and Cramer’s Rule
1 2
1 2
3 2 18
2 2
x x
x x
12
1 2
18 3
22 2
xx
x x
2 2
1
2
2
18 312 3
2
2
2 2
2x x
x
x x
2
1
3
2 2( ) 43
x
x
12
1 2
18 3
22 2
xx
x x
6
10/19/2011
4
Requirements for a solution
Need as many (unique) equations as unknowns
Having a square matrix (n equations and n unknowns) isn’t good enough
The matrix A must be non-singular, or the rank(A) must equal n The rows must be linearly independent
7
Gauss Elimination is a Fundamental procedure for solving systems of linear equations
Diagonal systems are easy:
Consider the following:
1 0 0 1
0 3 0 , 6
0 0 5 15
A b
1
2
3
1
3 6
5 15
x
x
x
x3 = -15/5 = -3
x2 = 6/3 = 2
x1 = -1/1 = -1
Back Substitution
8
10/19/2011
5
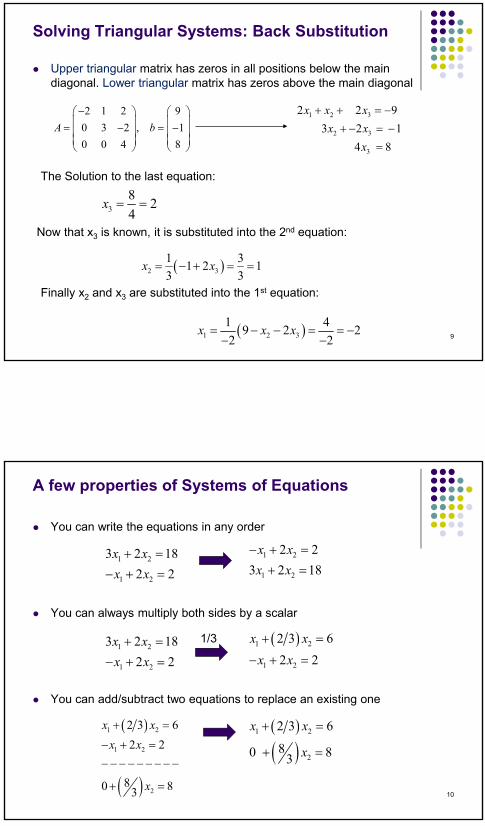
Solving Triangular Systems: Back Substitution
Upper triangular matrix has zeros in all positions below the main diagonal. Lower triangular matrix has zeros above the main diagonal
2 1 2 9
0 3 2 , 1
0 0 4 8
A b
1 2 3
2 3
3
2 2 9
3 2 1
4 8
x x x
x x
x
3
82
4x
2 3
1 31 2 1
3 3x x
1 2 3
1 49 2 2
2 2x x x
The Solution to the last equation:
Now that x3 is known, it is substituted into the 2nd equation:
Finally x2 and x3 are substituted into the 1st equation:
9
A few properties of Systems of Equations
You can write the equations in any order
You can always multiply both sides by a scalar
You can add/subtract two equations to replace an existing one
1 2
1 2
2 2
3 2 18
x x
x x
1 2
1 2
3 2 18
2 2
x x
x x
1 2
1 2
2 3 6
2 2
x x
x x
1 2
1 2
3 2 18
2 2
x x
x x
1/3
1 2
1 2
2
2 3 6
2 2
80 83
x x
x x
x
1 2
2
2 3 6
80 83
x x
x
10
10/19/2011
6
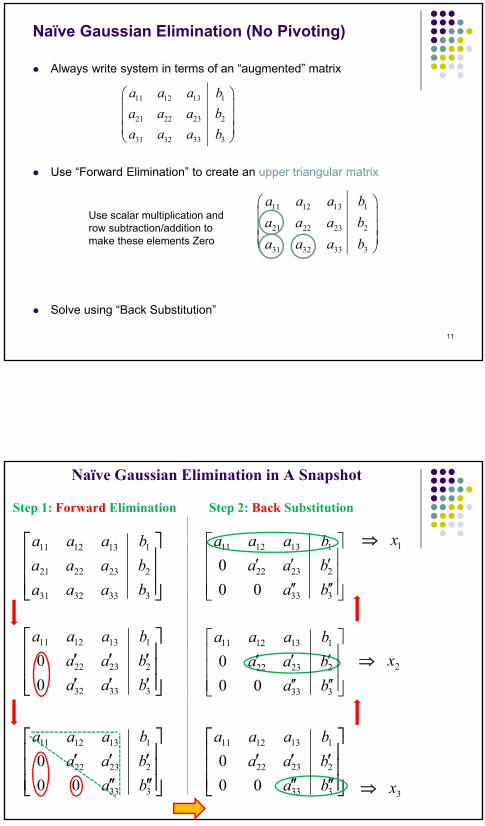
Naïve Gaussian Elimination (No Pivoting)
Always write system in terms of an “augmented” matrix
Use “Forward Elimination” to create an upper triangular matrix
Solve using “Back Substitution”
11 12 13 1
21 22 23 2
31 32 33 3
a a a b
a a a b
a a a b
11 12 13 1
21 22 23 2
31 32 33 3
a a a b
a a a b
a a a b
Use scalar multiplication and row subtraction/addition to make these elements Zero
11
333
22322
1131211
00
0
ba
baa
baaa
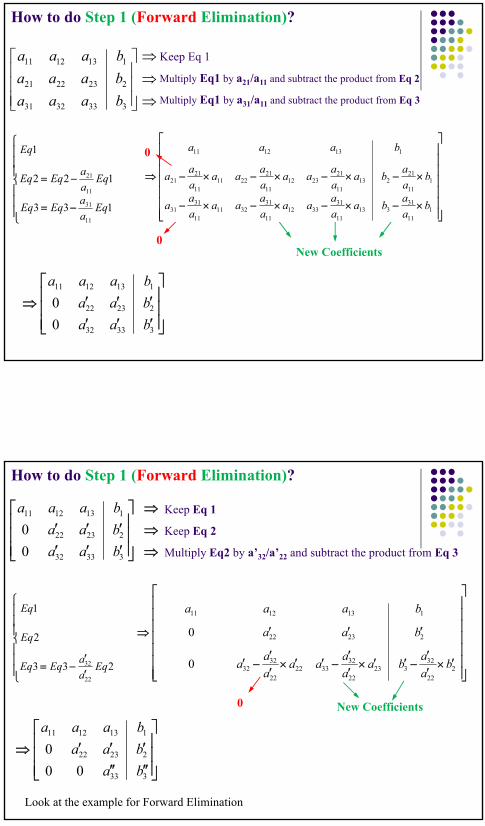
Naïve Gaussian Elimination in A Snapshot
Step 1: Forward Elimination
3333231
2232221
1131211
baaa
baaa
baaa
33332
22322
1131211
0
0
baa
baa
baaa
333
22322
1131211
00
0
ba
baa
baaa
Step 2: Back Substitution
333
22322
1131211
00
0
ba
baa
baaa
3x
2x
1x
333
22322
1131211
00
0
ba
baa
baaa
10/19/2011
7
How to do Step 1 (Forward Elimination)?
3333231
2232221
1131211
baaa
baaa
baaa Keep Eq 1
Multiply Eq1 by a21/a11 and subtract the product from Eq 2
Multiply Eq1 by a31/a11 and subtract the product from Eq 3
133
122
1
11
31
11
21
Eqa
aEqEq
Eqa
aEqEq
Eq
111
31313
11
313312
11
313211
11
3131
111
21213
11
212312
11
212211
11
2121
1131211
ba
aba
a
aaa
a
aaa
a
aa
ba
aba
a
aaa
a
aaa
a
aa
baaa
0
0
New Coefficients
33332
22322
1131211
0
0
baa
baa
baaa
How to do Step 1 (Forward Elimination)?
233
2
1
22
32 Eqa
aEqEq
Eq
Eq
222
32323
22
323322
22
3232
22322
1131211
0
0
ba
aba
a
aaa
a
aa
baa
baaa
0 New Coefficients
33332
22322
1131211
0
0
baa
baa
baaa Keep Eq 1
Keep Eq 2
Multiply Eq2 by a’32/a’22 and subtract the product from Eq 3
333
22322
1131211
00
0
ba
baa
baaa
Look at the example for Forward Elimination
10/19/2011
8
How to do Step 2 (Back Substitution)?
Substitute x3 and x2 back in Eq 1 to find x1
Substitute x3 back in Eq 2 to find x2
Find x3 from Eq 3
Look at the example for Back Substitution
333
22322
1131211
00
0
ba
baa
baaa
3333
2323222
1313212111
bxa
bxaxa
bxaxaxa
or
33
33
2232322
1131321211
3333
2323222
1313212111
/)(
/)(
a
bx
axabx
axaxabx
bxa
bxaxa
bxaxaxa
Back Substitution
Back Substitution
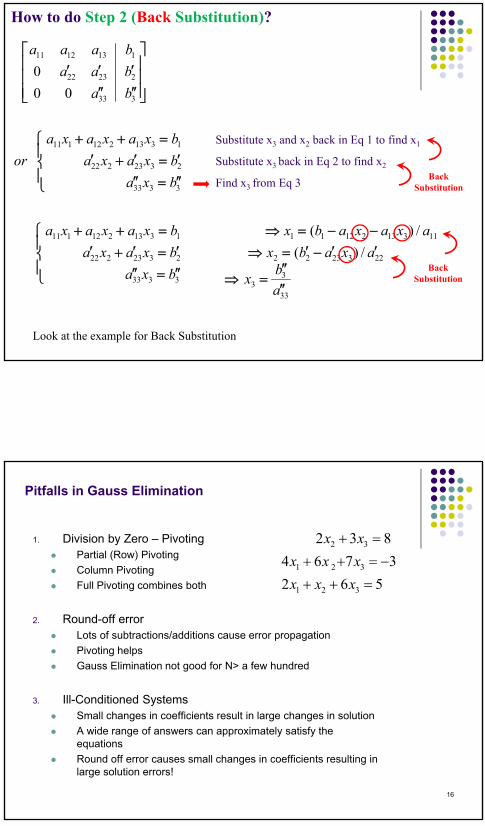
Pitfalls in Gauss Elimination
1. Division by Zero – Pivoting Partial (Row) Pivoting
Column Pivoting
Full Pivoting combines both
2. Round-off error Lots of subtractions/additions cause error propagation
Pivoting helps
Gauss Elimination not good for N> a few hundred
3. Ill-Conditioned Systems Small changes in coefficients result in large changes in solution
A wide range of answers can approximately satisfy the equations
Round off error causes small changes in coefficients resulting in large solution errors!
2 3
1 2 3
1 2 3
2 3 8
4 6 7 3
2 6 5
x x
x x x
x x x
16
10/19/2011
9
Partial Pivoting
Sometimes Gauss Elimination results in a zero at the “pivot”
Switch two rows at that point to avoid the problem (Row Pivoting) Be sure to move the right-hand side also
This WILL NOT change the “x”, solution vector
Can also exchange columns DO NOT move the right-hand side!
This WILL change the “x”, solution vector
Exchanging columns and rows is FULL PIVOTING
Robust algorithms pivot even when there is no “zero” to avoid roundoff
17
Common Questions
Why can I just multiply a row by an arbitrary number? Because we multiply both sides of the equation by the same number. So they are
equivalent
Why can I add/subtract two equations and still have a valid system? Since the equations are linearly independent, I get a new independent equation in the
vector space
If I multiply a row by a scalar and then add/subtract, shouldn’t the multiplied-row change also in your matrix? It actually doesn’t matter, because they are equivalent. It is often easier to keep the
original equation
I get a different upper-triangular matrix when I perform GE You can get a different matrix depending on whether you try to add or subtract during
forward-elimination
18
10/19/2011
10
Review :Lots of engineering problems involve “simultaneous” linear equations,
Must be “N” independent equations for “N” unknowns for unique solution
Gauss Elimination is systematic approach to obtain solution1. Forward Elimination: Series of row operations used to create “upper
triangular” system
2. Back Substitution: Sequentially calculate xN, xN-1, …
bAx
11 12 13 1
21 22 23 2
31 32 33 3
a a a b
a a a b
a a a b
11 12 13 1
22 23 2
33 3
0
0 0
u u u d
u u d
u d
x3=b’3/a’33, and so on
19
Pitfalls in Gauss Elimination
Sometimes a “zero” appears in “pivot” point Even small numbers (near zero) can cause a problem
Round off error can accumulate with all those subtractions
Pivoting (row and column) is used to help with “pitfalls” Switch any two rows (be sure to change “b” vector also)
Switch any two columns (“b” doesn’t change, but “x” does)
Good programming practice: 1. Systematically eliminates rows
2. Includes pivoting
9.182.431.10075
0.152.253.500.200
3.205.301.60001.0
20
10/19/2011
11
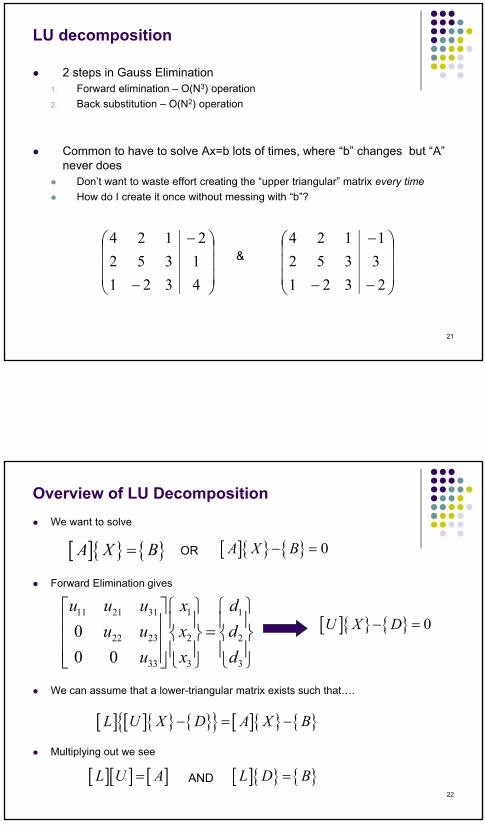
LU decomposition
2 steps in Gauss Elimination 1. Forward elimination – O(N3) operation
2. Back substitution – O(N2) operation
Common to have to solve Ax=b lots of times, where “b” changes but “A” never does
Don’t want to waste effort creating the “upper triangular” matrix every time
How do I create it once without messing with “b”?
4321
1352
2124
2321
3352
1124&
21
Overview of LU Decomposition
We want to solve
Forward Elimination gives
We can assume that a lower-triangular matrix exists such that….
Multiplying out we see
A X B 0A X B
0U X D
L U X D A X B
L U A L D B
11 21 31 1 1
22 23 2 2
33 3 3
0
0 0
u u u x d
u u x d
u x d
OR
AND22
10/19/2011
12
Overview of LU Decomposition
23
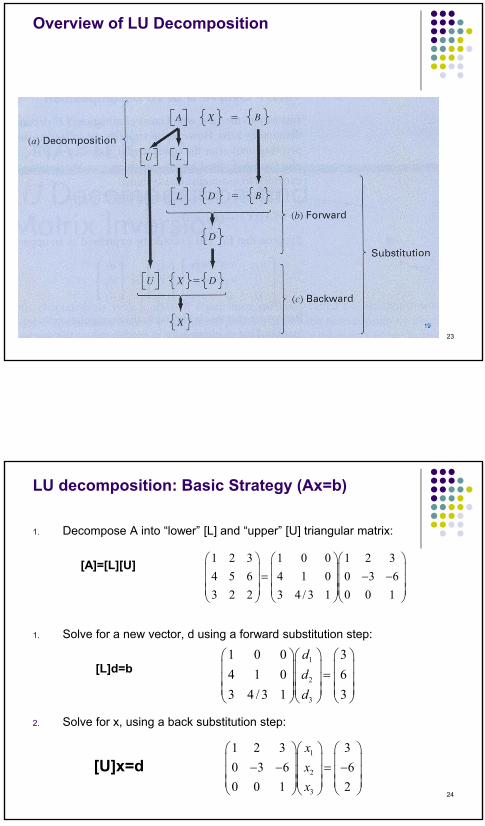
LU decomposition: Basic Strategy (Ax=b)
1. Decompose A into “lower” [L] and “upper” [U] triangular matrix:
[A]=[L][U]
1. Solve for a new vector, d using a forward substitution step:
[L]d=b
2. Solve for x, using a back substitution step:
[U]x=d
1 2 3 1 0 0 1 2 3
4 5 6 4 1 0 0 3 6
3 2 2 3 4 / 3 1 0 0 1
1
2
3
1 0 0 3
4 1 0 6
3 4 / 3 1 3
d
d
d
1
2
3
1 2 3 3
0 3 6 6
0 0 1 2
x
x
x
24
10/19/2011
13
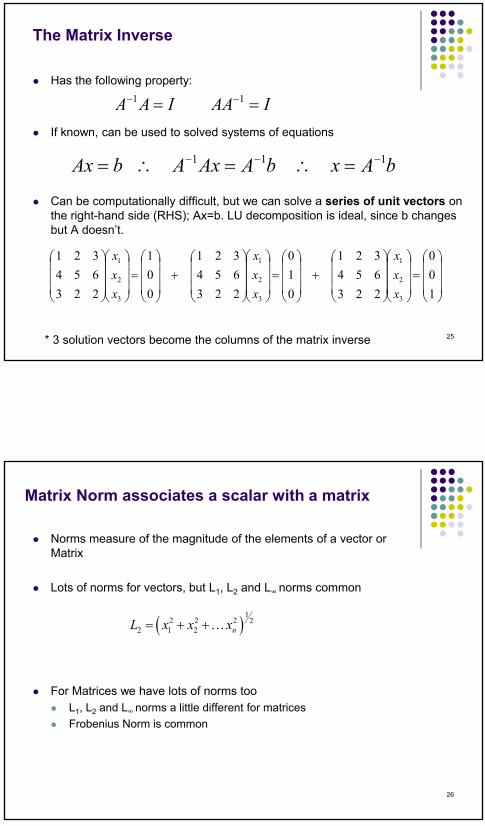
The Matrix Inverse
Has the following property:
If known, can be used to solved systems of equations
Can be computationally difficult, but we can solve a series of unit vectors on the right-hand side (RHS); Ax=b. LU decomposition is ideal, since b changes but A doesn’t.
IAAIAA 11
bAxbAAxAbAx 111
1
0
0
223
654
321
0
1
0
223
654
321
0
0
1
223
654
321
3
2
1
3
2
1
3
2
1
x
x
x
x
x
x
x
x
x
* 3 solution vectors become the columns of the matrix inverse 25
Matrix Norm associates a scalar with a matrix
Norms measure of the magnitude of the elements of a vector or Matrix
Lots of norms for vectors, but L1, L2 and L∞ norms common
For Matrices we have lots of norms too L1, L2 and L∞ norms a little different for matrices
Frobenius Norm is common
1
2 2 2 22 1 2 nL x x x
26

10/19/2011
14
Frobenius Norm reshapes matrix into a vector and computes norm
12
2
1 1
m n
ijFi j
A a
Example: Vector a :
Matrix A:
]3421[ a
1072.3)3421(
477.5)3421(
10)3421(
3
13333
3
2
12222
2
1
a
a
a
3124
1213
4512
A
53939.991)3...34512( 2
1222222
FA
Induced matrix norms use a vector norm to define a related matrix norm
Note: Similar to Vector Norms, there are some other Matrix Norms other than Frobenius Norm. Each of these Matrix Norms has its own definition.
e.g. (which is called Column-Sum Norm)
is the maximum value between summation of absolute values of each column
1A
9)8,8,4,9max())314(),125(),211(),432max((
3124
1213
4512
1
A
A
You mostly use Frobenius norms and not other ones.
10/19/2011
15
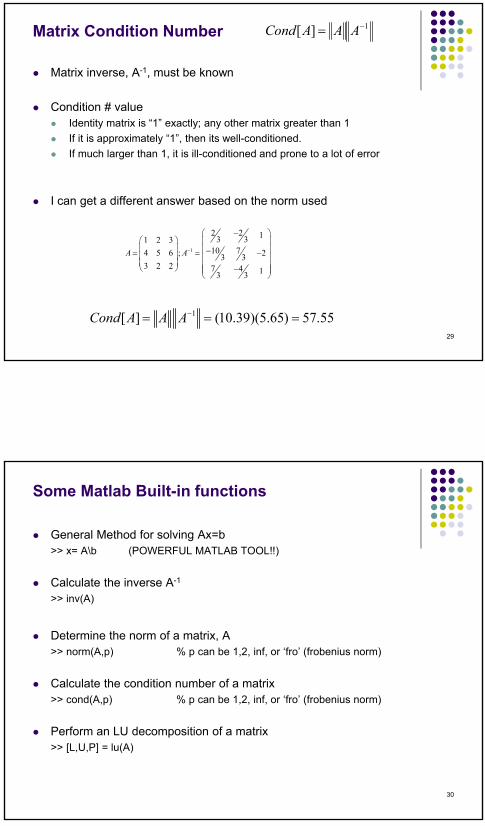
Matrix Condition Number
Matrix inverse, A-1, must be known
Condition # value Identity matrix is “1” exactly; any other matrix greater than 1
If it is approximately “1”, then its well-conditioned.
If much larger than 1, it is ill-conditioned and prone to a lot of error
I can get a different answer based on the norm used
1][ AAACond
1
2 2 13 31 2 310 74 5 6 ; 23 3
3 2 2 7 4 13 3
A A
1[ ] (10.39)(5.65) 57.55Cond A A A 29
Some Matlab Built-in functions
General Method for solving Ax=b>> x= A\b (POWERFUL MATLAB TOOL!!)
Calculate the inverse A-1
>> inv(A)
Determine the norm of a matrix, A>> norm(A,p) % p can be 1,2, inf, or ‘fro’ (frobenius norm)
Calculate the condition number of a matrix>> cond(A,p) % p can be 1,2, inf, or ‘fro’ (frobenius norm)
Perform an LU decomposition of a matrix>> [L,U,P] = lu(A)
30
10/19/2011
16
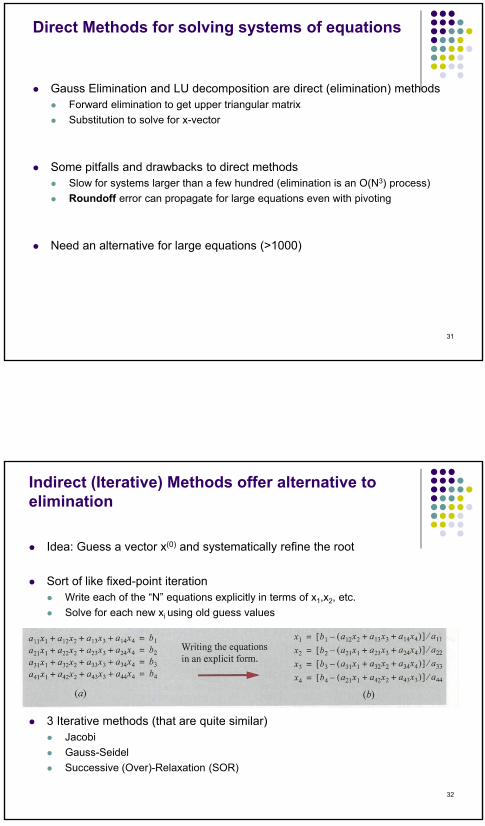
Direct Methods for solving systems of equations
Gauss Elimination and LU decomposition are direct (elimination) methods Forward elimination to get upper triangular matrix
Substitution to solve for x-vector
Some pitfalls and drawbacks to direct methods Slow for systems larger than a few hundred (elimination is an O(N3) process)
Roundoff error can propagate for large equations even with pivoting
Need an alternative for large equations (>1000)
31
Indirect (Iterative) Methods offer alternative to elimination
Idea: Guess a vector x(0) and systematically refine the root
Sort of like fixed-point iteration Write each of the “N” equations explicitly in terms of x1,x2, etc.
Solve for each new xi using old guess values
3 Iterative methods (that are quite similar) Jacobi
Gauss-Seidel
Successive (Over)-Relaxation (SOR)
32
10/19/2011
17
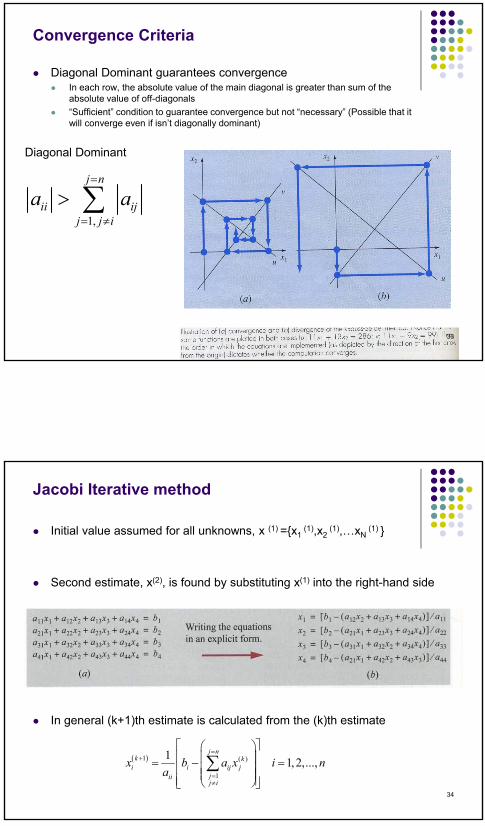
Convergence Criteria
Diagonal Dominant guarantees convergence In each row, the absolute value of the main diagonal is greater than sum of the
absolute value of off-diagonals
“Sufficient” condition to guarantee convergence but not “necessary” (Possible that it will converge even if isn’t diagonally dominant)
1,
j n
ii ijj j i
a a
Diagonal Dominant
33
Jacobi Iterative method
Initial value assumed for all unknowns, x (1) ={x1 (1),x2
(1),…xN (1) }
Second estimate, x(2), is found by substituting x(1) into the right-hand side
In general (k+1)th estimate is calculated from the (k)th estimate
1 ( )
1
11,2,...,
j nk ki i ij j
jiij i
x b a x i na
34
10/19/2011
18
Converging…when are you done?
Continue until differences b/w values obtained in iterations are small (i.e. when the answer isn’t changing much anymore)
Stop when approximate relative error of all the unknowns is smaller than tolerance
Careful – it is possible the solution isn’t changing much, but still isn’t an acceptable answer
1
1, 2,...k ki i
ki
x xa x
tol i n
35
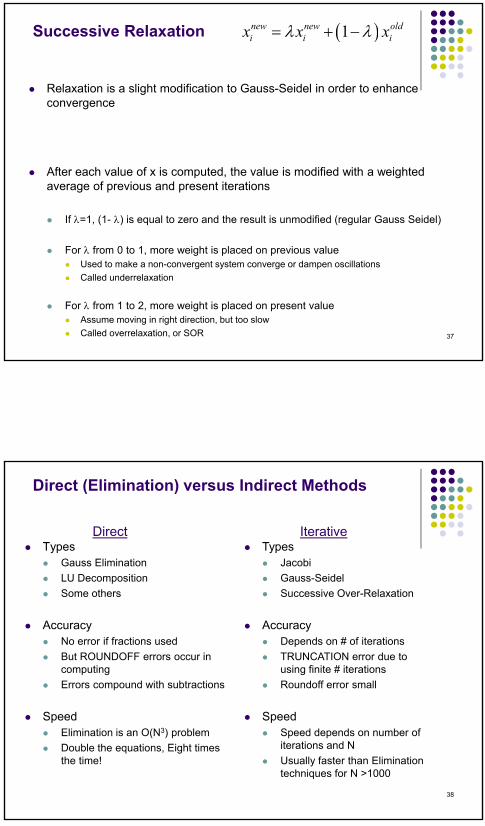
Gauss-Seidel Method
Jacobi method waits until the end of iteration; then updates entire solution vector, x(k) , all at once
Gauss Seidel is a little more greedy Update the value of xi
(k) as soon as you calculate it
In iteration (k), use recent values of xi’s
Gauss-Seidel is faster, but may not converge as well
( 1) ( )1 1 1
211
1( 1) ( 1) ( )
1 1
1( 1) ( 1)
1
1
12,3,... 1
1
j nk k
j jj
j i j nk k ki i ij j ij j
j j iii
j nk kn n nj j
jnn
x b a xa
x b a x a x i na
x b a xa
36
10/19/2011
19
Successive Relaxation
Relaxation is a slight modification to Gauss-Seidel in order to enhance convergence
After each value of x is computed, the value is modified with a weighted average of previous and present iterations
If =1, (1- ) is equal to zero and the result is unmodified (regular Gauss Seidel)
For from 0 to 1, more weight is placed on previous value Used to make a non-convergent system converge or dampen oscillations
Called underrelaxation
For from 1 to 2, more weight is placed on present value Assume moving in right direction, but too slow
Called overrelaxation, or SOR
1new new oldi i ix x x
37
Direct (Elimination) versus Indirect Methods
Types Gauss Elimination
LU Decomposition
Some others
Accuracy No error if fractions used
But ROUNDOFF errors occur in computing
Errors compound with subtractions
Speed Elimination is an O(N3) problem
Double the equations, Eight times the time!
Types Jacobi
Gauss-Seidel
Successive Over-Relaxation
Accuracy Depends on # of iterations
TRUNCATION error due to using finite # iterations
Roundoff error small
Speed Speed depends on number of
iterations and N
Usually faster than Elimination techniques for N >1000
Direct Iterative
38
10/19/2011
20
Review… Systems of Linear Equations
Common in Science and Engineering (and college football!)
Direct Methods – error dominated by roundoff Gauss Elimination
LU decomposition
Iterative Methods – error dominated by truncation Jacobi
Gauss Seidel (w/ or w/o relaxation)
39
Systems of Non-Linear Equations
Consider:
Can be re-written as:
In general:
2
2
10
3 57
x xy
y xy
21
22
( , ) 10 0
( , ) 3 57 0
f x y x xy
f x y y xy
1 1 2
2 1 2
1 2
( , , , ) 0
( , , , ) 0
( , , , ) 0
n
n
n n
f x x x
f x x x
f x x x
Solution consists of set of x-values that result in all equations equal to zero
40
10/19/2011
21
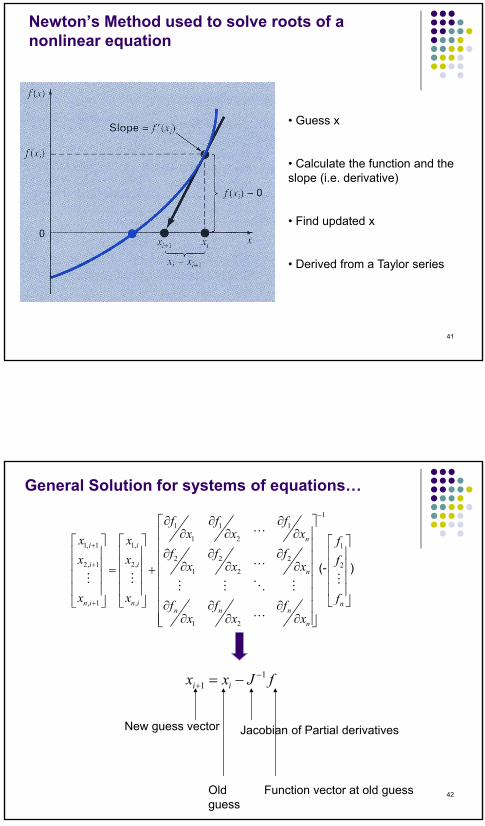
Newton’s Method used to solve roots of a nonlinear equation
• Guess x
• Calculate the function and the slope (i.e. derivative)
• Find updated x
• Derived from a Taylor series
41
General Solution for systems of equations…
1
1 1 1
1 21, 1 1, 1
2 2 22, 1 2, 2
1 2
, 1 ,
1 2
ni i
i in
n i n i nn n n
n
f f fx x xx x f
f f fx x fx x x
x x ff f fx x x
11i ix x J f
New guess vector
Old guess
Jacobian of Partial derivatives
Function vector at old guess 42
(- )
10/19/2011
22
Comparison of 1D to multi-dimensions
11i i ix x J f x 1
1 '( ) ( )i i i ix x f x f x
1D solution Multidimensional solution
• x, f(x) are vectors in multidimensions
• Jacobian, J, the matrix of partial derivatives
• Evaluate the Jacobian at current guess, xi
1 1J
J
43
Solution Strategy (Guess vector xi)
1. Calculate the vector f(xi), and J (matrix of partial derivatives)
2. Solve J x = -f (gives x=J-1f)• Gauss Elimination• LU decomposition• Gauss Seidel, etc.
3. Update xi+1=xi + x & Iterate 11i i ix x J f x
1 1 2
2 1 2
1 2
( , , , ) 0
( , , , ) 0
( , , , ) 0
n
n
n n
f x x x
f x x x
f x x x
44
10/19/2011
23
Iterations
Continue iterations while iterations are not changing much Similar to Gauss Seidel
(xi+1-xi)/xi is small
Choose largest value for error
Should be careful it isn’t a local min We really want f(x)=0 (but f is a vector)
Could use dot product f*f’ < tol
45
Convergence of Multidimensional Newton Method
Like 1D, Newton’s method converges QUADRATICALLY near the root
No guarantee it will converge to right root (multiple solutions?)
Good engineer tries to choose a good guess value for x
Even then, it may still diverge
46





























![SYMMETRIC MATRICES* GlRARD MEURANTscgroup.hpclab.ceid.upatras.gr/class/SCII/Various/Meurant_SML0007… · for inverses of tridiagonal matrices and [3], [9], [10], [24], [29], [31],](https://img.pdfslide.us/doc/110x75/5f961821e6af832afc428e7a/symmetric-matrices-glrard-for-inverses-of-tridiagonal-matrices-and-3-9-10.jpg)