-
8/7/2019 Ch3 Lec3 Sameer Akram
1/37
Lecture 3 on Chapter 3
A Top-Level View of Computer
Function and Interconnection
by Sameer Akram
-
8/7/2019 Ch3 Lec3 Sameer Akram
2/37
Interconnection Structures
Computer set of components or modules of threebasic types
(Processor, I/O, Memory) thatcommunicate with each other.
All the units must be connected.
The collection of paths connecting the variousmodules is called
the Interconnection Structure.
Different type of connection for different type of
unit Memory
Input/Output
CPU
-
8/7/2019 Ch3 Lec3 Sameer Akram
3/37
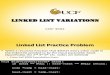
Computer Modules
-
8/7/2019 Ch3 Lec3 Sameer Akram
4/37
Memory Connection
Receives and sends data
Receives addresses (of locations)
Receives control signals
Read
Write
-
8/7/2019 Ch3 Lec3 Sameer Akram
5/37
Input/Output Connection(1)
Output Receive data from computer
Send data to peripheral
Input
Receive data from peripheral
Send data to computer
-
8/7/2019 Ch3 Lec3 Sameer Akram
6/37
Input/Output Connection(2)
Receive control signals from computer
Send control signals to peripherals
e.g. spin disk
Receive addresses from computer
e.g. port number to identify peripheral
Port: Interface to an external device is referredto as port.
Each port is assigned a uniqueaddress/number.
Send interrupt signals (control)
-
8/7/2019 Ch3 Lec3 Sameer Akram
7/37
CPU Connection
Reads instruction and data
Writes out data (after processing)
Sends control signals to other units
Receives (& acts on) interrupts
-
8/7/2019 Ch3 Lec3 Sameer Akram
8/37
Buses
There are a number of possible interconnection systems Memory to
Processor
Processor to Memory
I/O to Processor
Processor to I/O I/O to or from Memory: For these two cases, an
I/O
module is allowed to exchange data directly withmemory, without
going through the processor, usingdirect memory access (DMA)
Single and multiple BUS structures are most common
Unibus (DEC-PDP)
-
8/7/2019 Ch3 Lec3 Sameer Akram
9/37
Bus
A communication pathway connecting two or moredevices.
Shared Transmission Medium
Usually Broadcast: Multiple devices connect to the
bus and a signal transmitted by any one device isavailable for
reception by all other devices attachedto the bus.
Often grouped
A number of channels in one bus
e.g. 32 bit data bus is 32 separate single bitchannels
-
8/7/2019 Ch3 Lec3 Sameer Akram
10/37
System Bus
A Bus that connects major computer components(processor, I/O,
memory) is called a System Bus.
Most common computer interconnection structuresare based on the
use of one or more system buses.
A System Bus consists, typically, of from about 50to hundreds of
separate lines. Each line is assigneda particular meaning or
function.
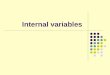
On any bus the lines can be classified into three
functional groups Data
Address
Control
-
8/7/2019 Ch3 Lec3 Sameer Akram
11/37
-
8/7/2019 Ch3 Lec3 Sameer Akram
12/37
Address Bus
Identify the source or destination of data.
e.g. CPU needs to read an instruction (data) from agiven
location in memory
Address bus width determines maximum memorycapacity of
system
e.g. 8080 has 16 bit address bus giving 64kaddress space
-
8/7/2019 Ch3 Lec3 Sameer Akram
13/37
Control Bus
Control Lines are used to control the access to andthe use of
the data and address lines.
Because Data and Address Lines are shared by allcomponents;
there must be a means of controlling
their use. Control and timing information
Memory Read / Write signal
I/O Read / Write signal
Transfer ACK
Bus request
Interrupt request
Clock signals
-
8/7/2019 Ch3 Lec3 Sameer Akram
14/37
Control Bus
Typical Control Lines include the following signals: Memory
Read
Memory Write
I/O Read
I/O Write Transfer ACK
Bus request
Bus grant
Interrupt request Interrupt ACK
Clock signals: used to synchronize operations.
Reset: Initializes all modules.
-
8/7/2019 Ch3 Lec3 Sameer Akram
15/37
Bus Interconnection Scheme
-
8/7/2019 Ch3 Lec3 Sameer Akram
16/37
What do Buses look like?
What do buses look like?
Parallel lines on circuit boards
Ribbon cables
Strip connectors on mother boards
e.g. PCI
Sets of wires
-
8/7/2019 Ch3 Lec3 Sameer Akram
17/37
Single Bus Problems
Lots of devices on one bus leads to: Propagation delays
Long data paths mean that co-ordination ofbus use can adversely
affect performance
If aggregate data transfer approaches buscapacity
Most systems use multiple buses to overcome
these problems
-
8/7/2019 Ch3 Lec3 Sameer Akram
18/37
Multiple Buses
Traditional (ISA) (with cache)
-
8/7/2019 Ch3 Lec3 Sameer Akram
19/37
High Performance Bus [Mezzanine Architecture]
-
8/7/2019 Ch3 Lec3 Sameer Akram
20/37
Elements ofBus Design
Bus Type Dedicated
Multiplexed
Method of Arbitration
Centralized Distributed
Timing
Synchronous
Asynchronous Bus Width
Address
Data
-
8/7/2019 Ch3 Lec3 Sameer Akram
21/37
Elements ofBus Design
Data Transfer Type
Read
Write
Read-modify-write Read-after-write
Block
-
8/7/2019 Ch3 Lec3 Sameer Akram
22/37
Bus Types
DedicatedA dedicated bus line is permanently assigned either
to one function or to a physical subset of
computercomponents.
An example of functional dedication is the use ofseparate
dedicated data and address lines.
However it is not essential.
-
8/7/2019 Ch3 Lec3 Sameer Akram
23/37
Bus Types
Multiplexed Bus Type [Time Multiplexing]Address and Data
information may be transmitted
over the same set of lines using an Address ValidControl
Line.
At the beginning of a data transfer, the address isplaced on the
bus and the Address Valid line isactivated.
At this point each module has a specified period oftime to copy
the address and determine if it is the
addressed module. The address is then removed from the bus, and
the
same bus connections are used for the subsequentread or write
data transfer.
This method is known as Time Multiplexing.
-
8/7/2019 Ch3 Lec3 Sameer Akram
24/37
Bus Types
Multiplexed[Time Multiplexing]
Advantages
Fewer lines
Saves space and cost
Disadvantages More complex control
Potential reduction in performance; Becausecertain events that
share the same lines cannot
take place in parallel.
-
8/7/2019 Ch3 Lec3 Sameer Akram
25/37
Bus Arbitration
More than one module may need control of the bus. For example,
CPU and DMA controller
An I/O module may need to read or write directly tomemory,
without sending data to the processor.
Because only one module can control bus at one time,some method
of arbitration is needed.
Arbitration may
Centralized
Distributed
-
8/7/2019 Ch3 Lec3 Sameer Akram
26/37
Centralised Arbitration
Single hardware device controlling bus access controllogic
Bus Controller
Arbiter
May be part of CPU or separate.
Responsible for allocating time on Bus.
-
8/7/2019 Ch3 Lec3 Sameer Akram
27/37
Distributed Arbitration
No central controller
Each module may claim the bus.
Control logic exist on all modules.
Modules act together to share the bus.
With both methods of arbitration, the purpose is todesignate one
device, either processor or an I/O
module, as master. The master may then initiate a datatransfer
with some other device, which acts as slave forthis particular
exchange.
-
8/7/2019 Ch3 Lec3 Sameer Akram
28/37
Timing
Timing : Co-ordination of events on bus Synchronous
Events determined by clock signals
Control Bus includes clock line upon which a clock
transmits a regular sequence of alternating 1s and 0sof equal
duration.
A single 1-0 transmission is referred to as a clockcycle or bus
cycle and defines a time slot.
All devices can read clock line.
Usually sync on leading edge
Usually a single cycle for an event
-
8/7/2019 Ch3 Lec3 Sameer Akram
29/37
Synchronous Timing Diagram
-
8/7/2019 Ch3 Lec3 Sameer Akram
30/37
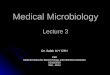
Synchronous Timing Diagram
Processor places a memory address on the address linesduring the
first clock cycle and may assert status lines.
Once the address lines have been stabilized, theprocessor issues
an address enable signal.
For a read operation, the processor issues a readcommand at the
start of the second cycle.
A memory module recognizes the address and after adelay of one
cycle, places the data on the data lines.
For a write operation, the processor puts the data onthe data
lines, at the start of second cycle and issues awrite command after
the data lines have been stabilized.
The memory module copies the information from thedata lines
during the third clock cycle.
-
8/7/2019 Ch3 Lec3 Sameer Akram
31/37
Asynchronous Timing Read Diagram
-
8/7/2019 Ch3 Lec3 Sameer Akram
32/37
Asynchronous Timing Read Diagram
With Asynchronous Timing, the occurrence of one eventon a bus
follows and depends on the occurrence of aprevious event.
Processor places address and status signals on the bus.
After pausing for these signals to stabilize, it issues aread
command, indicating the presence of valid addressand control
signals.
The appropriate memory decodes the address andresponds by
placing the data on the data line.
The memory module asserts acknowledge line to signalthe
processor that the data are available.
Once the master has read the data from the data lines,it
deasserts the read signal.
-
8/7/2019 Ch3 Lec3 Sameer Akram
33/37
Asynchronous Timing Write Diagram
-
8/7/2019 Ch3 Lec3 Sameer Akram
34/37
Asynchronous Timing Write Diagram
In this case, the master places data on the data line atthe same
time that it puts signals on the status andaddress lines.
The memory module responds to the write command bycopying the
data from the data lines and then asserting
the acknowledge line. Then master drops the write signal and the
memory
module drops the acknowledge signal.
-
8/7/2019 Ch3 Lec3 Sameer Akram
35/37
Bus Width
The wider the data bus, the greater the number of
bitstransferred at one time.
The wider the address bus, the greater the range oflocations
that can be referenced.
-
8/7/2019 Ch3 Lec3 Sameer Akram
36/37
Data Transfer Type
Data Transfer Type
Read
Write
Read-modify-write Read-after-write
Block
-
8/7/2019 Ch3 Lec3 Sameer Akram
37/37
PCI Bus
Peripheral Component Interconnection. Can function as a
mezzanine or peripheral bus.
Intel released to public domain in 1990.
PCI delivers better system performance forhigh-speed I/O
subsystems [Graphic Display
Adapters, Network Interface Cards, DiskControllers etc]
Current Version PCI 2.2 32 or 64 bit