-
8/12/2019 ch06-part 4
1/36
Signal-Space Diagram of MSK
Using a well-known trigonometric identity in the equation of
CPFSK signal, we may express the CPFSK signal s(t) in terms
of its in-phase and quadrature components as follows:
Consider first the in-phase component (2Eb/Tb) cos[(t)].
With the deviation ratio h= 1/2, we have
where the plus sign corresponds to symbol 1 and the minus
sign
corresponds to symbol 0.
-
8/12/2019 ch06-part 4
2/36
Signal-Space Diagram of MSK
Since the phase states (0) and (Tb) can each assume one of
two
possible values, any one of four possibilities can arise, as
described
here:
The phase (0) = 0 and (Tb) = /2, corresponding to the
transmissionof symbol 1
The phase (0) = and (Tb) = /2, corresponding to the
transmissionof symbol 0
The phase (0) = and (Tb) = -/2,(or, equivalently, 3/2 modulo2),
corresponding to the transmission of symbol 1.
The phase (0) = 0 and (Tb) = -/2, corresponding to the
transmission
of symbol 0.
This, in turn, means that the MSK signal itself may assume any
one of
four possible forms, depending on the values of (0) and (Tb)
.
-
8/12/2019 ch06-part 4
3/36
Signal-Space Diagram of MSK
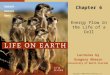
Accordingly, the signal constellation for an MSK signal is
two-
dimensional (i.e., N = 2), with four possible message points
(i.e.,
M = 4), as illustrated in Figure 6.29.
The coordinates of the message points are as follows in a
counterclockwise direction: (+Eb, +Eb), (-Eb, +Eb), (-Eb, -Eb),
and (+Eb, -Eb).
The possible values of (0) and (Tb), corresponding to these
four message points, are also included in Figure 6.29.
The signal-space diagram of MSK is thus similar to that ofQPSK
in that both of them have four message points.
-
8/12/2019 ch06-part 4
4/36
Figure
6.29
Signal-spacediagram for
MSK system.
-
8/12/2019 ch06-part 4
5/36
Signal-Space Diagram of MSK
However, they differ in a subtle way that should be
carefully
noted: In QPSK the transmitted symbol is represented by any
one of the four message points, whereas in MSK one of two
message points is used to represent the transmitted symbol
at
any one time, depending on the value of (0). The next table
presents a summary of the values of (0) and
(Tb), as well as the corresponding values of sl and s2 that
are
calculated for the time intervals -Tb tTb and 0 t
2Tb,respectively.
-
8/12/2019 ch06-part 4
6/36
Signal-Space Diagram of MSK
The first column of this table indicates whether symbol 1 or
symbol 0was sent in the interval 0 tTb.
Note that the coordinates of the message points, sl and s2,
haveopposite signs when symbol 1 is sent in this interval, but the
same signwhen symbol 0 is sent.
-
8/12/2019 ch06-part 4
7/36
Example
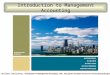
Figure 6.30 shows the sequences and waveforms involved in
the
generation of an MSK signal for the binary sequence 1101000.
The
input binary sequence is shown in Figure 6.30a. The two
modulation
frequencies are: fl= 5/4Tband f2= 3/4Tb. Assuming that, at time
t= 0
the phase (0) is zero, the sequence of phase states is as shown
in Figure
6.30, modulo 2. The polarities of the two sequences of factors
used toscale the time functions l(t) and 2(t) are shown in the top
lines of
Figures 6.30b and 6.30c. Note that these two sequences are
offset
relative to each other by an interval equal to the bit duration
Tb. The
waveforms of the resulting two components of s(t), namely,sll
(t) and
s22(t), are also shown in Figures 6.30b and 6.30c. Adding these
twomodulated waveforms, we get the desired MSK signal s(t) shown
in
Figure 6.30d.
-
8/12/2019 ch06-part 4
8/36
Figure 6.30
(a) Input binarysequence.
(b) Waveform of
scaled time function
s1f
1(t). (c) Waveform
of scaled time
function s2f2(t). (d)
Waveform of the
MSK signal s(t)
obtained by addings1f1(t) and s2f2(t) on
a bit-by-bit basis.
-
8/12/2019 ch06-part 4
9/36
Error Probability of MSK
Referring to the signal-space diagram of Figure 6.29, we see
that the decision made by the receiver is between the
message
points ml and m3 for symbol 0, or between the message points
m2and m4for symbol 1.
The corresponding decisions whether (0) = 0 or and whether(Tb)
is -/2 or +/2 (i.e., the bit decisions) are made alternatelyin the
I- and Q-channels of the receiver, with each channel
looking at the input signal for 2Tbseconds.
The signal from other bits does not interfere with the
receiversdecision for a given bit in either channel.
-
8/12/2019 ch06-part 4
10/36
-
8/12/2019 ch06-part 4
11/36
Generation and Detection of MSK Signals
Figure 6.31a shows the block diagram of a typical MSK
transmitter.
The advantage of this method of generating MSK signals is that
the
signal coherence and deviation ratio are largely unaffected
by
variations in the input data rate.
Two input sinusoidal waves, one of frequency fc = nc/4Tb for
somefixed integer nc, and the other of frequency 1/4Tb, are first
applied to a
product modulator.
This produces two phase-coherent sinusoidal waves at frequencies
fl
andf2, which are related to the carrier frequencyfcand the bit
rate 1/Tb
for h= 1/2. These two sinusoidal waves are separated from each
other by two
narrowband filters, one centered atfland the other atf2.
-
8/12/2019 ch06-part 4
12/36
-
8/12/2019 ch06-part 4
13/36
Generation and Detection of MSK Signals
The resulting filter outputs are next linearly combined
toproduce the pair of quadrature carriers or orthonormal
basisfunctions l(t) and 2(t).
Finally, l(t) and 2(t) are multiplied with two binary waves
a1(t)and a
2(t), both of which have a bit rate equal to 1/2T
b.
Figure 6.31b shows the block diagram of a typical
MSKreceiver.
The received signal x(t) is correlated with locally
generatedreplicas of the coherent reference signals l(t) and
2(t).
Note that in both cases the integration interval is 2Tb
seconds,and that the integration in the quadrature channel is
delayed byTbseconds with respect to that in in-phase channel.
-
8/12/2019 ch06-part 4
14/36
Generation and Detection of MSK Signals
The resulting in-phase and quadrature channel correlatoroutputs,
x1and x2, are each compared with a threshold of zero,and estimates
of the phase (0) and (Tb) are derived in themanner described
below.
If we have the estimates (0) = 0 and (Tb) = -/2, or
alternatively if we have the estimates (0) = and (Tb) = /2,the
receiver makes a decision in favor of symbol 0.
If we have the estimates (0) = and (Tb) = -/2, oralternatively
if we have the estimates (0) = 0 and (Tb) = /2,the receiver makes a
decision in favor of symbol 1.
Finally, these phase decisions are interleaved so as to
reconstructthe original input binary sequence with the minimum
average
probability of symbol error in an AWGN channel.
-
8/12/2019 ch06-part 4
15/36
Power Spectra of MSK Signals
As with the binary FSK signal, we assume that the input
binary
wave is random with symbols 1 and 0 equally likely, and the
symbols transmitted during different time slots being
statistically independent.
The baseband power spectral density of the MSK signal is
givenby
-
8/12/2019 ch06-part 4
16/36
Power Spectra of MSK Signals
The baseband power spectrum is plotted in Figure 6.9, where
the power spectrum is normalized with respect to 4Eb and the
frequencyfis normalized with respect to the bit rate 1/Tb.
Forf>> 1/Tb, the baseband power spectral density of the
MSK
signal falls off as the inverse fourth power of
frequency,whereas in the case of the QPSK signal it falls off as
the inverse
square of frequency.
Accordingly, MSK does not produce as much interference
outside the signal band of interest as QPSK.
-
8/12/2019 ch06-part 4
17/36
M-ary FSK
Consider the M-ary version of FSK, for which the transmitted
signals are defined by
where i= 1, 2, . . . , M, and the carrier frequencyfc=
nc/2Tfor
some fixed integer nc.
Since the individual signal frequencies are separated by
1/2T
Hz, the signals in the above equation are orthogonal; that
is
-
8/12/2019 ch06-part 4
18/36
-
8/12/2019 ch06-part 4
19/36
M-ary FSK
Specifically, noting that the minimum distance dmin in M-ary
FSK is 2E:
For fixed M, this bound becomes increasingly tight as E/N0
is
increased.
Indeed, it becomes a good approximation toPefor values of Pe
10-3.
Moreover, forM= 2 (i.e., binary FSK), the bound of the
aboveequation becomes an equality.
-
8/12/2019 ch06-part 4
20/36
Power Spectra of M-ary FSK Signals
The spectral analysis of M-ary FSK signals is much more
complicated than that of M-ary PSK signals.
A case of particular interest occurs when the frequencies
assigned to the multilevels make the frequency spacing
uniform
and the frequency deviation k= 0.5. That is, theMsignal
frequencies are separated by 1/2T, where T
is the symbol duration.
For k= 0.5, the baseband power spectral density of M-ary FSK
signals is plotted in Figure 6.36 forM= 2, 4, 8.
-
8/12/2019 ch06-part 4
21/36
Figure 6.36Power spectra of M-ary FSK signals forM2, 4, 8.
-
8/12/2019 ch06-part 4
22/36
Detection of Signals with Unknown Phase
Up to this point in our discussion, we have assumed that the
receiver isperfectly synchronized to the transmitter, and the only
channelimpairment is noise.
In practice, however, it is often found that in addition to the
uncertaintydue to channel noise, there is also uncertainty due to
the randomness of
certain signal parameters. The usual cause of this uncertainty
is distortion in the transmission
medium.
Synchronization with the phase of the transmitted carrier may
then betoo costly, and the designer may choose to disregard the
phaseinformation in the received signal at the expense of some
degradation
in noise performance. A digital communication receiver with no
provision made for carrier
phase recovery is said to be noncoherent.
-
8/12/2019 ch06-part 4
23/36
Optimum Quadratic Receiver
Consider a binary digital communication system in which the
transmitted signal is
where E is the signal energy, T is the duration of the
signalinginterval, and the carrier frequency i for symbol i is an
integral
multiple of 1/2T.
The system is assumed to be noncoherent, in which case the
received signal for an AWGN channel may be written in the
form
-
8/12/2019 ch06-part 4
24/36
Optimum Quadratic Receiver
where is the unknown carrier phase, and w(t) is the sample
function of a white Gaussian noise process of zero mean and
power spectral densityN0/2.
In a real-life situation it is realistic to assume complete lack
of
prior information about and to treat it as a random variablewith
uniform distribution:
-
8/12/2019 ch06-part 4
25/36
Optimum Quadratic Receiver
We may formulate the conditional likelihood function of
symbol
si, given the carrier phase , as
We may express the likelihood function for the signal
detectionproblem described herein in the compact form
The binary hypothesis test (i.e., the hypothesis that signal
s1(t)or signals2(t) was transmitted) can now be written as
-
8/12/2019 ch06-part 4
26/36
Optimum Quadratic Receiver
where hypothesisH1andH2correspond to signalss1(t) ands2(t),
respectively.
For convenience of implementation, however, the hypothesis
test is carried out in terms of li2 instead of li, as shown
by
A receiver based on the above equation is known as the
quadratic receiver.
-
8/12/2019 ch06-part 4
27/36
Two Equivalent Forms of Quadratic Receiver
We next derive two equivalent forms of the quadrature
receivershown in Figure 6.37a.
The first form is obtained easily by replacing each correlator
inFigure 6.37a with a corresponding equivalent matched filter.
We thus obtain the alternative form of quadrature receivershown
in Figure 6.37b.
In one branch of this receiver, we have a filter matched to
thesignal cos(2fit), and in the other branch we have a
filtermatched to sin(2fit), both of which are defined for the
timeinterval 0 tT.
The filter outputs are sampled at time t= T, squared, and
thenadded together.
-
8/12/2019 ch06-part 4
28/36
Figure 6.37Noncoherentreceivers.
(a) Quadrature
receiver usingcorrelators.
(b) Quadrature
receiver using
matched filters.(c) Noncoherent
matched filter.
-
8/12/2019 ch06-part 4
29/36
Two Equivalent Forms of Quadratic Receiver
To obtain the second equivalent form of the quadrature
receiver,
suppose we have a filter that is matched to s(t) = cos(2fit+
)
for 0 tT.
The envelope of the matched filter output is obviously
unaffected by the value of phase . The output of such a filter
in response to the received signalx(t)
is given by
-
8/12/2019 ch06-part 4
30/36
Two Equivalent Forms of Quadratic Receiver
The envelope of the matched filter output is proportional to
the
square root of the sum of the squares of the integrals in
the
above equation.
The output (at time T) of a filter matched to the signal
cos(2fit
+ ), of arbitrary phase , followed by an envelope detector isthe
same as the corresponding output of the quadrature receiver
of Figure 6.37a.
This form of receiver is shown in Figure 6.37c.
The combination of matched filter and envelope detector
shown
in Figure 6.37c is called a noncoherent matched filter.
-
8/12/2019 ch06-part 4
31/36
Noncoherent Orthogonal Modulation
Consider a binary signaling scheme that involves the use of
twoorthogonal signalssl(t) ands2(t), which have equal energy.
During the interval 0 tT, one of these two signals is sentover
an imperfect channel that shifts the carrier phase by anunknown
amount.
Let gl(t) and g2(t) denote the phase-shifted versions of sl(t)
ands2(t), respectively.
lt is assumed that the signals gl(t) and g2(t) remain
orthogonaland have the same energyE, regardless of the unknown
carrier
phase.
We refer to such a signaling scheme as noncoherent
orthogonalmodulation.
-
8/12/2019 ch06-part 4
32/36
Noncoherent Orthogonal Modulation
The channel also introduces an additive white Gaussian noisew(t)
of zero mean and power spectral densityN0/2.
We may thus express the received signalx(t) as
The requirement is to use x(t) to discriminate between s1(t)
and
s2(t), regardless of the carrier phase.
For this purpose, we employ the receiver shown in Figure
6.39a.
The receiver consists of a pair of filters matched to the
transmitted signalss1(t) ands2(t).
-
8/12/2019 ch06-part 4
33/36
-
8/12/2019 ch06-part 4
34/36
Noncoherent Orthogonal Modulation
Because the carrier phase is unknown, the receiver relies
onamplitude as the only possible discriminant.
If the upper path in Figure 6.39a has an output amplitude
llgreater than the output amplitude l2 of the lower path,
thereceiver makes a decision in favor ofs1(t).
If the converse is true, it decides in favor ofs2(t).
When they are equal, the decision may be made by flipping afair
coin.
In any event, a decision error occurs when the matched
filterthat rejects the signal component of the received signalx(t)
has alarger output amplitude (due to noise alone) than the
matchedfilter that passes it.
-
8/12/2019 ch06-part 4
35/36
Noncoherent Orthogonal Modulation
We note that a noncoherent matched filter (constituting theupper
or lower path in the receiver of Figure 6.39a) may be
viewed as being equivalent to a quadrature receiver.
The quadrature receiver itself has two channels.
One version of the quadrature receiver is shown in Figure
6.39b.
In the upper channel, called the in-phase channel, the
received
signalx(t) is correlated with the function i(t) which
represents
a scaled version of the transmitted signals1(t) ors2(t) with
zero
carrier phase.
-
8/12/2019 ch06-part 4
36/36
Noncoherent Orthogonal Modulation
In the lower channel, called the quadrature channel, on the
otherhand, x(t) is correlated with another function i(t), which
represents the version of i(t) that results from shifting
the
carrier phase by -90 degrees.
The average probability of error for the noncoherent receiver
ofFigure 6 .39a is given by the simple formula
where E is the signal energy per symbol, and N0
/2 is the noise
spectral density.