-
IntroductiontoGlobal Positioning System
-
INTRODUCTIONThe Global Positioning System (GPS) is a technology,
which provides unequalled accuracy and flexibility of positioning
for navigation, surveying and GIS data capture. The GPS NAVSTAR
(Navigation Satellite timing and Ranging Global Positioning System)
is a satellite-based navigation, timing and positioning system. GPS
provides continuous 3D positioning 24-hrs a day throughout the
world.
-
INTRODUCTIONThe technology is beneficiary to the GPS user
community in terms of obtaining accurate data up to about 100
meters for navigation, metre-level for mapping, and down to
milli-metre level for geodetic positioning. The GPS technology has
tremendous amount of applications in GIS data collection,
surveying, and mapping.
-
Geopositioning - Basic Concepts By positioning we understand as
the determination of position of stationary or moving objects.
These can be determined as follows: i) In relation to a
well-defined coordinate system, usually by three coordinate values
and ii) In relation to other point, taking one point as the origin
of a local coordinate system.
-
Geo-positioning - Basic ConceptsThe first mode of positioning is
known as point positioning, the second as relative positioning.
If the object to be positioned is stationary, it is known as
STATIC POSITIONING. When the object is moving, then it is known as
KINEMATIC POSITIONING.
Usually, the static positioning is used in surveying and the
kinematic position in navigation.
-
GPS - Components and Basic Facts
The GPS uses satellites and computers to compute positions
anywhere on earth and is based on satellite ranging.
That means the position on the earth is determined by measuring
the distance from a group of satellites in space.
-
Measurements of distanceDistance measurementstart: 0.00 s
-
GPS - Components and Basic Facts
The basic principle behind GPS is really simple, even though the
system employs some of the most high-technology based equipment
ever developed.
In order to understand GPS basics, the system can be categorised
into FIVE logical Steps
-
STEP ITo compute a position in three dimensions, four satellites
have to be observed.
-
STEP IITo triangulate, the GPS measures the distance using the
travel time of the radio message. To measure travel time, the GPS
needs a very accurate clock.
-
STEP IIIOnce the distance to a satellite is known, then its
location in space is required.
-
STEP IVAs the GPS signal travels through the ionosphere and the
earth's atmosphere, the signal is delayed.
-
Components of a GPS
The GPS is divided into three major components
The Space Segment The Control Segment The User Segment
-
SPACE SEGMENT
-
CONTROL SEGMENT The Control Segment consists of five monitoring
stations Colorado Springs, Ascension Island, Diego Garcia, Hawaii,
and Kwajalein Island.
-
CONTROL SEGMENT
-
CONTROL SEGMENTThree of the stations (Ascension, Diego Garcia,
and Kwajalein) serve as uplink installations, capable of
transmitting data to the satellites, including new ephemerides i.e.
satellite positions as a function of time, clock corrections, and
other broadcast message data, Colorado Springs serves as the Master
Control station.
-
CONTROL SEGMENTThe Control Segment is the sole responsibility of
the Department of Defence (DoD) who undertakes construction,
launching, maintenance, and virtually constant performance
monitoring of all GPS satellites.The DoD monitoring stations track
all GPS signals for use in controlling the satellites and
predicting their orbits.
-
Control SegmentMeteorological data also are collected at the
monitoring stations, permitting the most accurate evaluation of
tropospheric delays of GPS signals.
Satellite tracking data from the monitoring stations are
transmitted to the master control station for processing. This
processing involves the computation of satellite ephemerides and
satellite clock corrections.
-
SPACE SEGMENT
The Space Segment consists of the Constellation of NAVSTAR earth
orbiting satellites.
The current Department of Defence plan calls for a full
constellation of 24 Block II satellites (21 operational and 3
in-orbit spares).
-
The satellites are arrayed in 6 orbital planes, inclined 55
degrees to the Equator.
They orbit at altitudes of about 12000, miles each, with orbital
periods of 12 sidereal hours (i.e., determined by or from the
stars), or approximately one half of the earth's periods,
approximately 12 hours of 3-D position fixes.
-
SPACE SEGMENT
The next block of satellites is called Block IIR, and they will
provide improved reliability and have a capacity of ranging between
satellites, which will increase the orbital accuracy. Each
satellite contains four precise atomic clocks (Rubidium and Cesium
standards) and has a microprocessor on board for limited
self-monitoring and data processing. The satellites are equipped
with thrusters which can be used to maintain or modify their
orbits.
-
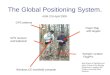
USER SEGMENT
The user segment is a total user and supplier community, both
civilian and military. It consists of all earth-based GPS receivers
which can vary greatly in size and complexity, though the basic
design is rather simple.
-
USER SEGMENT
The typical receiver is composed of an antenna and preamplifier,
radio signal microprocessor control and display device, data
recording unit, and power supply. The GPS receiver decodes the
timing signals from the 'visible' satellites (four or more) and,
having calculated their distances, computes its own latitude,
longitude, elevation, and time.
-
GPS Hand-held Type
-
USER SEGMENT
This is a continuous process and generally the position is
updated on a second-by-second basis, output to the receiver display
device and, if the receiver provides data capture capabilities,
stored by the receiver-logging unit.
-
SATELLITE RANGING
GPS positions are based on the measurement of the distance from
the satellite to the GPS receiver on earth. The GPS receiver can
determine the distance to each satellite. The basic idea of
determination of position is that of resection or trilateration,
which many surveyors use in their daily work.
-
SATELLITE RANGING If the distance of three points relative to
unknown position is known, then the position of unknown point
relative to these three points can be determined.Similarly, if the
distance of one satellite is known, then the position of the
receiver must be at some point on the surface of an imaginary
sphere of radius equal to that distance with origin at the
satellite. By intersecting three imaginary spheres the receiver
position can be determined accurately.
-
Satellite locationGiven 1 satellite
-
Satellite locationWe can locate our position on the surface of a
sphere
-
Satellite locationGiven 2 satellites
-
Satellite locationGiven 2 satellites
-
Satellite locationWe can locate our position on the intersection
of 2 spheres (a circle)
-
Satellite locationGiven 3 satellites
-
Satellite locationWe can locate our position on the intersection
of 3 spheres (2 points)
-
Satellite locationGiven 4 satellites we can locate our position
on the intersection of 4 spheres (1 point)
-
Satellite locationThe point should be located on the earths
surface
-
SATELLITE RANGING
The GPS receiver also calculates the distance from the receiver
to the satellite using the equation, Distance = Velocity x Time
wherevelocity = the velocity of the radio signal, i.e. 290,000 km
per second (speed of light) and time = the time taken by the radio
signal to travel from the satellite to the receiver.
-
SATELLITE COMMUNICATION
GPS satellites communicate all the information to receivers by
using codes.It broadcasts two carrier waves which are modulated by
the coded information signal. The two GPS carrier waves are radio
waves called L1 and L2, in the L-Band (390 MHz to 1550 MHz).These
are derived from the fundamental frequency of 10.23 MHz, generated
by a very precise atomic clock.
-
SATELLITE COMMUNICATION
They travel to the earth at the speed of light.These high
frequency transmissions from the satellite travel in straight lines
and have very low power. The power of transmission from the
satellite is about 50 watts. Hence it is essential that the antenna
of the GPS receiver have a direct view of the satellite.
-
SATELLITE COMMUNICATION
L1 carrier is broadcasted at 1575.42 MHz (10.23 x 154). L2
carrier is broadcasted at 1227.60 MHz (10.23x 120). The L1 carrier
has two codes modulated upon it:The Coarse/Acquisition code (C/A
code) modulated at 1.023 MHz The Precision code ( P-code 10.23
MHz). The L2 carrier has only one code modulated upon it, the L2
P-code, modulated at 10.23 MHz.
-
SATELLITE COMMUNICATION
The Navigation Message (the information that the satellites
transmit to a receiver) contains:- - the satellite orbital and
clock information, - general system status messages and - an
ionospheric delay model. The navigation code has a low frequency of
50 Hz and is modulated both on the L1 and L2 carriers. It
communicates the data in a message called GPS message or navigation
message.
-
GPS CODES
GPS receivers use different codes to distinguish between
satellites. These codes can also be used as a basis for making
pseudo-range measurements which enable the calculation of
position.GPS codes are binary in nature. The three basic codes in
GPS are - the Precise code or the P-code, - the Coarse/ Acquisition
code or C/ A code, - the Navigation code.
-
GPS CODES
The modulated C/ A code and P-code are referred to as
Pseudo-Random Noise (PRN) code. This PRN code is actually a
sequence of very precise time which permits the ground receivers to
compare and compute the time of transmission between the satellite
and ground station. From this transmission time, the range to the
satellite can be derived and is the basis behind GPS range
measurements. The C/A code pulse intervals are approximately 300 m
in range and the more accurate P-code intervals have a range of 30
m.
-
IMPORTANCE OF PRN CODE
The PRN code is a complex pattern, thus ensuring that the
receiver does not accidentally synchronize with some other signal.
The patterns are so complex that it is highly unlikely that a stray
signal will have exactly the same shape.Each satellite has its own
unique PRN code which ensures that the receiver will not
accidentally pick up a signal from another satellite. Hence all the
satellites can use the same frequency without signal jamming.
-
IMPORTANCE OF PRN CODE
This makes it difficult for any hostile force to jam the system.
In fact, the PRN code gives the DoD a complete control the access
to the system.Also, the codes make it possible to use information
theory to amplify the GPS signal. Further, the complexity of the
PRN code makes GPS economical. That is why GPS receivers do not
need big satellite dishes to receive the GPS signals.
-
PSEUDO-RANGE
It is a measure of the apparent signal propagation time from GPS
satellite to the GPS receiver antenna, scaled into distance by
speed of light. The apparent propagation time is the difference
between the time of signal reception and the time of emission.
Hence pseudo-range is the time delay between the satellite clock
and the receiver clock, as determined from C/A code or P-code
pulses.
-
PSEUDO-RANGE
If a satellite is right over the head of an observer, the travel
time of signal would be about 0.06 seconds.
This time difference gives range measurements but is called a
pseudo-range, since at the time of the measurement the receiver
clock is not synchronized to the satellite clock.
-
PSEUDO-RANGE
In most cases, an absolute 3D real time navigation position can
be obtained by observing at least four simultaneous pseudo-ranges.
Pseudo-range differs from the actual range due to - the influence
of satellite orbital errors, - user clock error, and - ionospheric
delays.
-
STANDARD POSITIONING SERVICE
The Standard Positioning Service uses the less precise C/A code
pseudo ranges for position calculation and for real-time GPS
navigation.
-
PRECISE POSITIONING SERVICE (PPS)
In Precise Positioning Service, pseudo-ranges are obtained using
the higher pulse rate P-code on both frequencies (L1 and L2),
thereby giving higher accuracy. Real time 3D accuracies at
sub-meter level (below 10 m horizontal) can only be achieved with
PPS. The P-code is encrypted to prevent unauthorized civil or
foreign use and requires a special key to obtain the accuracy
offered by PPS.
-
CARRIER PHASE MEASUREMENTS
Carrier frequency tracking measures the phase differences
between the Doppler shifted satellite and receiver frequencies. The
phase differences are continuously changing due to the changing
satellite-earth geometry and can be resolved in the receiver and
subsequent post-processing of data. When carrier phase measurements
are observed and compared between two stations, baseline vector
accuracy between the stations, below the centimeter level, is
attainable in 3D.
-
GPS BROADCAST
Each NAVSTAR GPS satellite periodically broadcasts data
concerning clock corrections, system and satellite status, and most
critically, its position or ephemeris data.
There are two basic types of ephemeris data- the broadcast and -
the precise.
-
Broadcast EphemerisThe broadcast ephemeris is actually predicted
satellite positions broadcasted within the navigation message
transmitted from the satellites in real time. A receiver capable of
acquiring either the C/A or P-code can acquire the ephemeris in
real time. The broadcast ephemeris is computed using past tracking
data of the satellites.
-
BROADCAST EPHEMERIS
The satellites are tracked continuously by the monitor stations
to obtain more recent data to be used for the orbit predictions.
The data is analyzed by the Master Control Stations and new
parameters for the satellite orbit are transmitted back to the
satellites. This upload is performed daily with new predicted
orbital elements transmitted every hour by the navigation
message.
-
PRECISE EPHEMERIS
The precise ephemeris is based on actual tracking data that is
post-processed to obtain more accurate satellite positions. This
ephemeris is available at later date and is more accurate than the
broadcast ephemeris and are based on the actual tracking data and
not predicted data. For most survey applications, the broadcast
ephemeris is adequate to needed accuracies.
-
ALMANAC DATA
GPS receiver stores the data about the position of the
satellites at any given time in its memory. This data is called the
almanac data received from the satellites. When the GPS receiver is
not turned long time, the almanac gets outdated as the latest
corrected data is not by the receiver for a long time. This
condition is called as a cold receiver.
-
ALMANAC DATA
When the GPS receiver is cold, it would take longer time to
acquire satellite. A receiver is considered warm, when the data has
been collected satellites within the last four to six hours.While
purchasing a new GPS receiver, the cold and warm acquisition
specifications must be noted, as the time taken by the GPS unit to
lock on to the satellite signals and calculate a position is
important. Once the locked onto enough satellites to calculate a
position, it is ready navigation or for surveying.
-
CALCULATING LOCATIONS
The signal emitted from the satellite, contains three components
in the symbolic form (L1, C/A, D), (L1, P, D), and (L2, P, D). The
aim of the signal processing by the GPS receiver is the recovery of
the signal components, including the reconstruction of the carrier
wave and the extraction of the codes for the satellite clock
readings and the navigation message as,
-
Calculating Locations:
-
CALCULATING LOCATIONS
A GPS receiver determines its position by using the signals that
it observes from different satellites. Since the navigation message
supplies the satellite positions and the code measurements provide
pseudo range (PR) between the receiver and the satellite, the
receiver computes its position using resection techniques. Since
the receiver must solve for its position (X,Y,Z) and the clock
error (x), four SVs are required to solve receiver's position using
the following four equations: R1= SQRT{(X-x1)2 +(Y-y1)2 +(Z-z1)2
+x2} R2= SQRT{(X-x2)2 +(Y-y2)2 +(Z-z2)2 +x2} R3= SQRT{(X-x3)2
+(Y-y3)2 +(Z-z3)2 +x2} R4= SQRT{(X-x4)2 +(Y-y4)2 +(Z-z4)2 +x2}
-
Calculating Locations
-
CALCULATING LOCATIONS
where (x1,y1) (x2,y2) (x3,y3) and (x4,y4) stand for the location
of satellites and R1, R2, R3, R4 are the distances of satellites
from the receiver position. Hence solving the four equations for
four unknowns X,Y, Z and x, the position or location of the station
is calculated. However, the accuracy of position determination
depends upon the code used in calculation.
-
CALCULATING LOCATIONS
Post processed static carrier-phase data can provide 1-5 cm
relative positioning within 30km of the reference receiver with
measurement time of 15 minutes for short baselines (10km) and one
hour for long baselines (30km). Rapid static or fast static
surveying can provide sub-m level accuracies with 20km baselines
and 10-20 minutes of recording time. The Real-time-Kinematic (RTK)
surveying technique provides centimetre measurements in real time
over 10km baselines tracking five or more satellites and real-time
radio links between the reference and remote receivers.
-
DIFFERENT TYPES OF GPS POSITIONING
-
POSITIONING MODES FOR GPS
Absolute or Point positioning where coordinates are in relation
to a well-defined global reference system.
Differential or relative positioning where coordinates are in
relation to some other fixed point. In GPS surveying this is
referred to as baseline determination.
-
POSITIONING MODES FOR GPS
Static positioning where coordinates of stationary points is
either absolute or relative mode. This is generally synonymous with
the surveying mode of positioning, based on the analysis of carrier
phase observations.
Kinematic positioning where coordinates of moving points is
either in absolute or relative mode. This is generally the
navigation mode of positioning, based on pseudo-range observations
(absolute positioning) and surveying mode in relative or
differential positioning.
-
NAVIGATION MODE
As all GPS observations are overwhelmed with biases, hence for
both navigation and surveying applications, an appropriate
combination of measurement and processing strategies must be used
to minimise their effect on the positioning results. There are some
distinctions to be made in data processing to minimise the effect
of biases in the measurements.
-
NAVIGATION MODE
In the point positioning mode, satellite clock error is ignored,
as it is assumed to be smaller than the measurement noise. Receiver
clock error is estimated in real time through redundant
measurements, because all data is contaminated by the same
biases.In the relative positioning mode, all satellite and
propagation biases are significantly reduced.
-
NAVIGATION MODE
In navigation mode of positioning, results are obtained in real
time, when four or more pseudo-ranges are processed
simultaneously.
Relative navigation is of higher accuracy as the primary biases
due to orbit error, atmospheric refraction and selective
availability (if switched on) are minimized.
-
SURVEYING MODE
Integrated carrier beat phase data is very precise, hence any
contamination by systematic errors is of greater concern than in
the case of pseudo-range measurements. Appropriate processing
techniques must therefore be used. However, the primary drawback of
this data type is its range ambiguity. In GPS surveying the major
biases are accounted for in the following ways:
-
SURVEYING MODE
Differencing the data collected simultaneously from two or more
GPS receivers for several GPS satellites, between satellites and
between receivers. This eliminates, or significantly reduces, most
of the biases. All position results are therefore expressed
relative to (fixed) datum stations.
The ambiguity bias is often estimated, though a weaker solution
can be obtained from the appropriate triple-difference
observable.
-
SURVEYING MODE
This is the surveying mode.
The fact that the receivers are stationary, and that data is
collected over some observation period, it permits the ambiguities
to be reliably estimated and a strong solution obtained.
There are alternative means of estimating ambiguities that
permit real time kinematic baseline determination to be carried out
as well.
-
ABSOLUTE POSITIONING
This mode of positioning relies upon a single receiver station.
It is also referred to as 'stand-alone' GPS, because ranging is
carried out strictly between the satellite and the receiver
station. As a result, the positions derived in absolute mode are
subject to the unmitigated errors inherent in satellite
positioning. It is, however, the most widely used military and
commercial GPS positioning method for real time navigation and
location determination.
-
ABSOLUTE POSITIONING
The accuracies obtained by GPS absolute positioning are
dependent on the user's authorization. A Standard Positioning
Service (SPS) user can obtain real-time point positional accuracies
of 25 m without selective availability (S/A). The Precise
Positioning Service (PPS) user (with a receiver capable of tracking
P-code) can use a decryption device to achieve a point positional
(3D) accuracy in the range of 10-12 m with a single-frequency
receiver.
-
ABSOLUTE POSITIONING
It can be further divided into two categories
Absolute positioning using carrier phase, andAbsolute
positioning using C/A-code (pseudo-ranging).
-
ABSOLUTE POINT POSITIONING WITH THE CARRIER PHASE
Here positional information gathered using a GPS receiver, which
is capable of tracking both the C/A-code and carrier phase. By
using broadcast ephemeris, the user is able to use pseudo-range
values in real time to determine absolute point positions with an
accuracy of 3 m in the best of conditions and 25 m in the worst. By
using post-processed ephemeris, the user can expect absolute point
positions with sub-meter accuracy in the best of conditions and 15
m in the worst.
-
ABSOLUTE POINT POSITIONING WITH PSEUDO-RANGING
By pseudo-ranging, the GPS user measures an approximate distance
between the antenna and the satellite by correlation of a
satellite-transmitted code and a reference code created by the
receiver, without any corrections for errors in synchronization
between the clock of the transmitter and that of the receiver. The
distance the signal has traveled is equal to the velocity of the
transmission of its satellite multiplied by the elapsed time of
transmission, with satellite signal velocity changes due to
tropospheric and ionospheric conditions being considered.
-
APP WITH PSEUDO-RANGING
Four pseudo-range observations are needed to resolve a 3D GPS
position. Three pseudo-range observations are needed for a 2D
location. In practice often more than four observations are taken.
More pseudo-ranges are required to resolve the clock biases
contained in both satellite and ground-based receiver. Thus in
solving for the X-Y-Z coordinates of a point, a fourth unknown
(i.e. the clock bias) must also be included in the solution.
-
DIFFERENTIAL POSITIONING
Relative or Differential GPS carries the triangulation
principles one step further, with a second receiver at a known
reference point. To further facilitate determination of a point's
position, relative to the known earth surface point, this
configuration demands collection of an error-correcting message
from the reference receiver.Differential-mode positioning relies
upon an established control point.The reference station is placed
on the control point, a triangulated position, the control point
coordinate.
-
A base station receiver is set up on a location with coordinates
known.Signal time at reference location is compared to time at
remote location.Time difference represents error in satellites
signalReal-time corrections transmitted to remote receiverSingle
frequency (1-5 m)Dual frequency (sub-meter)DIFFERENTIAL GPS
-
DIFFERENTIAL GPS
This allows for a correction factor to be calculated and applied
to other roving GPS units used in the same area and in the same
time series. Inaccuracies in the control point's coordinate are
directly additive to errors inherent in the satellite positioning
process. Error corrections derived by the reference station vary
rapidly, as the factors propagating position errors are not static
over time. This error correction allows for a considerable amount
of error to be negated, potentially as much as 90 percent.
-
DIFFERENT METHODS OF DGPS
There are eight basic DGPS surveying techniquesStatic surveying
Rapid Static surveying Stop-and-Go Kinematics surveying True
Kinematic surveyingPseudo-kinematic surveyingKinematic on-the-fly
(OTF) surveyingReal-time Kinematic (RTK) surveyingReal-time DGPS
(code/carrier) surveying
-
STATIC SURVEYING
It is the primary and most widely used differential technique
for control and geodetic surveying. It involves long observation
time (1-2 hours depending on number of visible satellites) in order
to resolve the integer ambiguities between the satellite and the
receive. Relative static positioning involves several stationary
receivers collecting simultaneously from at least four satellites
during an observation session which usually lasts 30 minutes to 2
hours.
-
STATIC SURVEYING
Post processing software analyzes all data from the receivers
simultaneously and obtains the differential position between the
two receivers. This method is used for long lines, geodetic
networks, tectonic plate studies etc. This method offers high
accuracy of 1cm to 0.1 cm over long distances like 10
kilometers.
-
RAPID STATIC SURVEYING
This method is the latest one added to GPS positioning
procedures. The concept behind rapid static surveying is to measure
baselines and determine positions up to centimeter level with short
observation time of about 5-20 minutes. The observation time is
dependent on the length of the baseline and number of visible
satellites. In rapid static surveys, a reference is chosen and one
or more rovers operate with respect to it.
-
RAPID STATIC SURVEYINGRapid static technique is used for
detailing the existing network, establishing control points etc. It
is similar to the static method, but consists of a shortened site
occupation time.
-
RAPID STATIC SURVEYING
Rapid static technique can provide the user with nearly the same
accuracy available from a 1-2 hour session of static positioning
with observations of 5-20 minutes. This is because it uses a
technique called wide laning which is based on the linear
combination of the measured phases from both GPS frequencies, L1
and L2. Carrier phase measurements can be made on L1 and L2
separately, but when they are combined, two distinct signals
result.
-
RAPID STATIC SURVEYING
One is called a narrow lane, which has a short wavelength of
10.7 cm and the other is known as a wide lane having 86.2 cm
wavelength. The frequency of the wide lane is 347.82 MHz, which is
three times lower than the original carriers. Further it is 86.2 cm
wavelength is about four times longer than the wavelength of L1 (19
cm) and L2 (24.4 cm). These changes greatly increase the spacing of
the phase ambiguity, thereby making its resolution much easier. For
rapid static surveys, the receivers used must be capable of
dual-frequency tracking.
-
STOP-AND-GO TECHNIQUE IN KINEMATIC METHOD
The term Kinematic is applied to GPS surveying methods where the
rover receivers are in continuous motion. However, for relative
positioning the more typical arrangement is a STOP-AND-GO
technique, a method developed by Dr. Benjamin Remondi.This method
is sometimes referred to as semi-kinematic survey.
-
STOP-AND-GO METHOD1234567Ref. Stn
-
STOP-AND-GO METHODIn this method a reference station is
established. At least four satellites have to be tracked without
signal loss for this method. Good geometry of satellite resulting
in good GDOP and strong satellite constellation is needed with
favorable ionospheric conditions. The roving receiver starts from
an initial point for initial rapid static fix or starts from a
known position coordinate.
-
STOP-AND-GO METHODThen it moves to other points maintaining lock
on the satellites. The rover remains only for a small time for two
epochs on each detail point 1, 2, 3,4, 5 in serial order. Using a
post processing software these points can be plotted.This technique
is similar to rapid static method in which all the receivers
observe the same satellites simultaneously, and the reference
receivers occupy the same control point throughout the survey.
-
STOP-AND-GO METHODApplications(i)Detailed and engineering
surveys in open areas.(ii)When points are too close together.
Advantages(i)It is a fast and economical method.(ii) One of the
fastest way to survey detail points. Disadvantages(i)New static or
rapid static fix is needed if complete loss of satellite lock
occurs.(ii)Must maintain phase lock to at least four satellites for
a successful survey.
-
KINEMATIC SURVEYING METHOD
Kinematic surveying is often referred to as dynamic surveying.
It is faster than static methods. It uses two single frequency L1
receivers for recording observations simultaneously. One receiver
is set over a known point (reference station) and the other is used
as rover (i.e. moved from point to point or along a path).
-
KINEMATIC SURVEYING METHODBefore the rover receiver can rove, a
period of static initialization or antenna swap must be performed.
The reference and rover are switched on and remain absolutely
stationary for 5-20 minutes, collecting data. The actual time
depends upon the baseline length from the reference and the number
of satellites observed. This period of static initialization is
dependent on the number of satellites visible.
-
After this period the rover starts to move freely, the user can
record its positions at a predefined recording rate (say at 1 or 2
or 5 seconds interval). This part of the measurements is commonly
called kinematic chain.
-
ADVANTAGESIn very short sessions or real time, it can produce
the large number of positions within a short period of time.Only
slight degradation in the accuracy of the work. In this method, the
receiver resolves the phase ambiguity, once and only once, at the
beginning of the project. Then by keeping a continuous lock on the
satellites signals, it maintains that solution throughout the work.
The kinematic technique needs initialization. The receivers can
occupy each end of a baseline between two control points and since
the distance between the points is known, the phase ambiguity is
resolved in a few minutes.
-
Applications of Kinematic Method(i) Measuring trajectory of
moving objects.(ii) In hydrographic surveys. (iii) In surveying
centre of a road. (iv) Photogrammetry with ground control. (v)
Collection of data for the preparation of highly accurate
topographic maps.
-
Advantages (i) Fast and economical(ii) Continuous
measurementsDisadvantages (i) New static or rapid static fix needed
in case of complete loss of satellite lock.(ii) Occupied stations
should be free of overhead obstructions. (iii) The route between
stations must be clear.
-
PSEUDO-KINEMATIC GPS SURVEY
Pseudo-kinematic GPS surveying is similar to stop-and-go
techniques except that loss of satellite lock is tolerated when the
receiver is transported between occupation sites. This feature
provides the surveyor with a more favourable positioning technique
since obstructions such as bridge overpasses, tall buildings, and
overhanging vegetation are common. Loss of lock that may result due
to these obstructions is more tolerable when pseudo-kinematic
techniques are employed.
-
Pseudo-kinematic techniques require that one receiver be placed
over a known control station. A rover receiver occupies each
unknown station for 5 minutes. After 1 hour of the initial station
occupation, the same rover receiver must re-occupy each unknown
station. The pseudo-kinematic technique requires that at least four
common satellites are observed between initial station occupation
and the requisite re-occupation.
-
Suppose a rover receiver occupies Point A for 5 minutes and
tracks satellites 6, 9, 11, 12, 13.After 1 hour later, during the
second occupation of Point A, it now tracks satellites 2, 6, 8, 9,
19. So only satellites 6 and 9 are common to the two sets, hence
the data cannot be processed as four common satellites have not
tracked during both occupation.Thus, prior mission planning is
essential in conducting a successful pseudo-kinematic survey. It
critical to determine whether or not common satellite coverage will
be present for the desired period of survey.
-
COMPARISON OF METHODS
Pseudo-kinematic and Stop-and-Go techniques are considered as
the ideal GPS measurement techniques for large scale surveying
purposes. Pseudo-kinematic technique can be used advantageously in
areas where there is a fear of signal shading due to vegetation and
built up areas, as there is no requirement for the rover receiver
to maintain its lock to the satellite during movement. For open
areas, Stop-and-Go technique proves more useful.
-
KINEMATIC ON THE FLY (OTF) OTF surveying is similar to kinematic
differential GPS surveying as it requires two receivers recording
observations simultaneously and allows the rover receiver to be
moving. Unlike the kinematic surveying, OTF surveying technique
uses dual frequency Ll/L2 GPS observations and can handle loss of
satellite lock. Since this method uses the L2 frequency, the GPS
receiver must be capable of tracking the L2 frequency during
anti-spoofing.
-
In OTF method, successful ambiguity resolutions are required for
baseline formulations. The OTF technology allows the rover receiver
to initialize and resolve the ambiguity integers without a period
of static initialization. With OTF, if loss of satellite lock
occurs, initialization can be done while on motion. The integers
can be resolved at the rover within 10-30 seconds, depending upon
distance from the reference station. OTF uses the L2 frequency
transmitted by the GPS satellites for the ambiguity resolution.
-
In this method, one of the GPS receivers is set over a known
point, and the other is moving or kept on a mobile platform. If the
survey is performed in real time, a data link and processor is
required and the method is known as Real time Kinematic Surveying
(RTK Method).
-
REAL TIME KINEMATIC SURVEYING (RTK)RTK is a method that can
offer positional accuracy in real time very near to static
carrier-phase positioning. RTK is capable of delivering 5 cm
accuracy. Unlike DGPS, RTK is a differential GPS method that uses
carrier phase observations corrected in real-time and therefore,
depends upon the fixing of the integer cycle ambiguity.
-
RTK systems resolve the integer ambiguity i.e. resolve the
carrier phase ambiguity. The method requires dual frequency GPS
receivers capable of making both carrier phase and precise
pseudo-range measurements. Observations on L1 and L2 are combined
into a wide lane (ambiguity = 86 cm), and the integer ambiguity is
solved in the first pass. This information is used to determine the
kinematic solution on L1.
-
Therefore, RTK suitable where there is good correlation of
atmospheric biases at both ends of the baseline and hence distance
between the base and rover should be less than 20 km. RTK requires
a radio link between the receivers at the base station and the
rover, and both must be tuned to the same frequency. Usually RTK
GPS surveying equipment operate between 450-470 MHz.The
configuration operates at 4800 or 9600 baud rate.
-
REAL-TIME DGPS SURVEYING
The code phase differential GPS system is commonly used for
positioning hydrographic survey vessels and dredges. It also used
for topographic, small-scale mapping surveys and input to GIS
database. Real-time DGPS is a method that improves GPS pseudo-range
accuracy. This is also known as real time (code) DGPS
surveying.
-
Differential GPS involves the usage of two receivers; one
stationary and other roving around making position measurements.
The stationary receiver is known as reference station, base station
or reference receiver. The second receiver that is roving is known
as rover receiver, mobile receiver or navigator. The reference
receiver antenna is mounted on a previously measured with known
coordinates and placed on a known survey station in an area having
an unobstructed view of sky.
-
A RTK DGPS consists of a GPS receiver, GPS antenna, processor
having a communication link (radio-link). The reference receiver is
switched on and it begins to track satellites. The reference
station measures the timing and ranging information broadcasted by
the satellites and computes and format range corrections for
broadcast to the user equipment.
-
It calculates its own position from the received signals from
the satellites. The actual co-ordinates of the known station of the
reference receiver antenna is fed manually. The reference receiver
works out the difference between the computed and measured value of
the ranges to the satellites. These differences known as
pseudo-range corrections.
-
Since the roving receiver may use any satellite to calculate its
position, the reference receiver quickly runs through all the
visible satellites and computes errors of all the visible
satellites. It then transmits all the corrections to the rover
receiver through the radio link. The rover, in turn, calculates
ranges to the satellites and then applies the transmitted
corrections to the corresponding satellite ranges. This enables the
rover receiver to calculate its position more accurately.
-
Further, multiple rover receivers can receiver corrections from
one single reference. Also, the base station takes a little time to
calculate these errors and transmit them through a radio link. The
rover receivers this transmitted data from the reference station,
decodes the data and applies it through its software.
-
The time is called as latency of the communication between the
reference and the rover. It may be as quarter of a second or a
couple of seconds. Since the base stations corrections are only
accurate for the instance they are generated for, the base station
must also send a range rate correction along with them. Using this
correction, the rover is able to give correction corresponding to
the instant it makes an observation.
-
Accuracy of GPSThere are four basic levels of accuracy - or
types of solutions - you can obtain with your real-time GPS mining
system:
Autonomous15 100 metersDifferential GPS (DGPS)0.5 5
metersReal-Time Kinematic Float (RTK Float) 20 cm 1 meterReal-Time
Kinematic Fixed (RTK Fixed) 1 cm 5 cm
-
SOLUTIONS GIVEN BY A GPS
Absolute Positions Uses.. C/A code onlyRequires.. Only one
receiverData from at least four satellitesProvides An accuracy
range of about 15 - 100 metersThis solution is designed for people
who just need an approximate location on the earth, such as a boat
at sea or a hiker in the mountains.
-
Real-Time Differential GPS (DGPS) PositionsUses.. C/A code
onlyRequires.. Two receiversA radio link between the two receivers.
Reference receiver at a known location broadcasts RTCM (Radio
Technical Commission for Maritime Services) corrections. Rover
receiver applies corrections for improved GPS positions
-
Data from at least four satellites - the same four at both the
references and rover (common satellites) Provides An accuracy range
of about 0.5 - 5 meters depending upon the quality of receiver and
antennae used.This solution gives much better results because here
we have a known position at a reference receiver. However it must
have a radio link between the reference receiver and the roving
(moving) receiver.
-
Real Time Kinematic (RTK) Float PositionsUses.. C/A code and
career waves.Requires.. Two receivers Reference receiver at a known
location tracks satellites and then broadcasts this satellite data
over a radio link in a format called CMR. (CMR is a Trimble -
defined format) Rover receiver receives data from both the
satellites and the reference station.
-
A radio link between the two receivers.Data from at least four
common satellites.Provides An accuracy range of about 20 cm to 1
meters. This solution uses more of the satellite signal than the
autonomous or DGPS solution. The CMR data is carrier phase
data.
-
Real Time Kinematic (RTK) Fixed SolutionsUses.. C/A code and
career waves.Requires.. Two receivers Reference receiver at a known
location tracks satellites and then broadcasts CMR data over a
radio link. Rover receiver receives data from both the satellites
and the reference station.
-
A radio link between the two receivers.Initialization, which is
achieved most easily with dual-frequency receivers.Data from at
least five common satellites to initialize on-the-fly (in
motion)Tracking at least four common satellites after initializing.
Provides An accuracy range of about 1 - 5 cm.
-
FACTORS THAT AFFECT GPS
-
The GPS errors associated with absolute GPS positioning mode
are:
(i) Number of satellite required.(ii) Multipath(iii) Ionospheric
delays(iv) Tropospheric delays(v) Satellite Health(vi) Signal
Strength(vii) Distance from the Reference receiver. (viii) Radio
frequency interference(ix) Loss of radio transmission from the
base.
-
NUMBER OF SATELLITES REQUIRED
At least four common satellites be tracked and the same four
satellites by both the reference and rover receivers, for either
DGPS or RTK solutions. Also to achieve centimeter -level accuracy,
a fifth satellite for on-the fly RTK initialization must be
tracked. This extra satellite adds a check on the internal
calculation. Any additional satellites beyond five provides even
more checks, which is always useful.
-
MULTIPATH
Multipath is simply reflection of signals similar to the
phenomenon of ghosting on our television screen. With multi-path
reception, the receiver collects both the direct signal from the
satellite and a fractionally delayed signal that has bounced off of
some nearby reflective surface then reached the receiver.
-
Avoid Reflective SurfacesUse A Ground Plane Antenna Use
Multipath Rejection ReceiverEffects of Multipath on the GPS
Signal
-
MULTIPATH
The problem is that the path of the signal that has reflected
off some surface is longer than the direct line to the satellite.
This can "confuse" some lower-end receivers resulting in an
incorrect range measurement and, consequently, an incorrect
position.
-
MULTIPATH
-
MULTIPATH
There are several ways to deal with this problem. Most receivers
have some way of "seeing" and comparing the correct and incorrect
incoming signal. Since the reflected multi-path signal has traveled
a longer path, it will arrive a fraction of a second later, and a
fraction weaker than the direct signal. By recognizing that there
are two signals, one right after another, and that second one is
slightly weaker than the first, the receiver can reject the later,
weaker signal, thus minimizing the problem. This ability is
referred to as the receiver's multi-path rejection capability.
-
MULTIPATH
Mapping and survey quality receivers use semi-directional,
ground-plane antennas to reduce the amount of multi-path that the
receiver will have to deal with. Semi-directional antennas are
designed to reject any signal below a tangent to the surface of the
Earth. This is usually seen as a large (up to 20 to 30 centimeters
across) flat metal plate (usually aluminum) with the actual, much
smaller, receiver antenna attached on top. The metal plate
interferes with any signals that may be reflected off of low
reflective surfaces below them, such as bodies of water.
-
IONOSPHERE - CHANGE IN THE TRAVEL TIME OF THE SIGNAL:
Before GPS signals reach the antenna on the earth, they pass
through a zone of charged particles called the ionosphere, which
changes the speed of the signal. If the reference and rover
receivers are relatively close together, the effect of ionosphere
tends to be minimal and if one is working with the lower range of
GPS precisions, the ionosphere is not a major consideration.However
if the rover is working too far from the reference station, one may
experience problems, particularly with initializing the RTK fixed
solution.
-
TROPOSPHERE
Troposphere is essentially the weather zone of the atmosphere,
and droplets of water vapour in it can effect the speed of the
signals. The vertical component of the GPS answer (i.e. elevation)
is particularly sensitive to the troposphere.
-
SATELLITE HEALTH - AVAILABILITY OF SIGNAL
While the satellite system is robust and dependable, it is
possible for the satellites to occasionally be unhealthy. A
satellite broadcasts its health status, based on information from
the U.S. Department of Defense. Receivers have safeguards to
protect against using data from unhealthy satellites.
-
SATELLITE GEOMETRY
Satellite Geometry - or the distribution of satellites in the
sky - effects the computation of your position. This is often
referred to as Position Dilution of Precision (PDOP).PDOP is
expressed as a number, where lower numbers are preferable to higher
numbers. The best results are obtained when PDOP is less than about
7.
-
PDOP is determined by the geographic location, the time of day,
and any site obstruction, which might block the satellites. It is
advisable that a planning software be used to determine when one
will have the most satellites in a particular area. When satellites
are well spread out, PDOP is Low (good). When satellites are close
together, PDOP is High (weak).
-
Dilution Of Precision (DOP)A Measure of The Geometry Of The
Visible GPS ConstellationGood DOPPoor DOP
-
Dilution Of Precision VDOP = Vertical Dilution Of PrecisionPDOP
= Position Dilution Of Precision (Most Commonly Used)GDOP =
Geometric Dilution Of PrecisionHDOP = Horizontal Dilution Of
PrecisionTDOP = Time Dilution Of PrecisionMission PlanningIs
Critical to ObtainGood DOP
-
SIGNAL STRENGTH
The strength of the satellite signal depends on obstructions and
the elevation of the satellites above the horizon. To the extent it
is possible, obstructions between your GPS antennae and the sky
should be avoided. Also watch out for satellites which are close to
the horizon, because the signals are weaker.
-
DISTANCE FROM THE REFERENCE RECEIVERThe effective range of a
rover from a reference station depends primarily on the type of
accuracy you are trying to achieve. For the highest real time
accuracy (RTK fixed), rovers should be within about 10-15 Km of the
reference station. As the range exceeds this recommended limit, you
may fail to initialize and be restricted to RTK float solutions
(decimeter accuracy).
-
RADIO FREQUENCY (RF) INTERFERENCE
RF interference may sometimes be a problem both for GPS
reception and radio link system. Some sources of RF interference
include: Radio towers Satellite dishesTransmitters GeneratorsOne
should be particularly careful of sources which transmit either
near the GPS frequencies (1227 and 1575 MHz) or near harmonics
(multiples) of these frequencies. One should also be aware of the
RF generated by his own machines.
-
Loss of Radio Transmission from Base
If, for any reason, there is an interruption in the radio link
between a reference receiver and a rover, then the rover is left
with an autonomous position. It is very important to set up a
network of radios and repeaters, which can provide the
uninterrupted radio link needed for the best GPS results.
-
GPS APPLICATIONSOne of the most significant and unique features
of the Global Positioning Systems is the fact that the positioning
signal is available to users in any position worldwide at any time.
With a fully operational GPS system, it can be generated to a large
community of likely to grow as there are multiple applications,
ranging from surveying, mapping, and navigation to GIS data
capture. The GPS will soon be a part of the overall utility of
technology.
-
SURVEYING AND MAPPING
The high precision of GPS carrier phase measurements, together
with appropriate adjustment algorithms, provide an adequate tool
for a variety of tasks for surveying and mapping. Using DGPS
methods, accurate and timely mapping of almost anything can be
carried out. The GPS is used to map cut blocks, road alignments,
and environmental hazards such as landslides, forest fires, and oil
spills.
-
SURVEYING AND MAPPING
Applications, such as cadastral mapping, needing a high degree
of accuracy also can be carried out using high grade GPS receivers.
Continuous kinematic techniques can be used for topographic surveys
and accurate linear mapping.
-
NAVIGATION
Navigation using GPS can save countless hours in the field. Any
feature, even if it is under water, can be located up to one
hundred meters simply by scaling coordinates from a map, entering
waypoints, and going directly to the site. Examples include road
intersections, corner posts, accident sites, geological formations,
and so on. GPS navigation in helicopters, in vehicles, or in a ship
can provide an easy means of navigation with substantial
savings.
-
REMOTE SENSING AND GIS
It is also possible to integrate GPS positioning into
remote-sensing methods such as photogrammetry and aerial scanning,
magnetometry, and video technology. Using DGPS or kinematic
techniques, depending upon the accuracy required, real time or
post-processing will provide positions for the sensor which can be
projected to the ground, instead of having ground control projected
to an image. GPS are becoming very effective tools for GIS data
capture.
-
REMOTE SENSING AND GIS
The GIS user community benefits from the use of GPS for
locational data capture in various GIS applications. The GPS can
easily be linked to a laptop computer in the field, and, with
appropriate software, users can also have all their data on a
common base with every little distortion. Thus GPS can help in
several aspects of construction of accurate and timely GIS
databases.
-
GPS ApplicationsGeodesy Geodetic mapping and other control
surveys can be carried out effectively using high-grade GPs
equipment, especially when the line of sight is not possible, GPS
can set new standards of accuracy and productivity. Military The
GPS was primarily developed for real time military positioning.
Military applications include airborne, marine, and land
navigation.
-
THE END
*The second segment we'll talk about is the Operational Control
Segment. This segment consists of 5 Monitor Stations on islands
near the equator (Hawaii, Ascension, Diego Garcia, and Kwajelin)
and one Master Control Station located at Falcon AFB, CO. All of
these stations track the GPS signals, and send them back to the
Master Control Station at Falcon. A backup MCS exists at Loral
Federal System in Gaithersburg, MD. The four stations track and
monitor the where-abouts of each GPS satellite each day. Then
land-based and space-based communications are used to connect the
monitoring stations with MCS.*Dilution of Precision (DOP)The
cumulative UERE (User Equivalent Range Error) totals are multiplied
by a factor of usually I to 6, which represents a value of the
Dilution of Precision, or DOP. The DOP is, in turn, a measure of
the geometry of the visible satellite constellation.The ideal
orientation of four or more satellites would be to have them
equally spaced all around the receiver, including one above and one
below. Because we're taking our position from only one side of the
Earth thats really not possible since the planet itself blocks that
part of space.The upper diagram at left illustrates the next best
orientation. That is, to have one satellite directly above and the
other three evenly spaced around the receiver and elevated to about
25 to 30 degrees (to help minimize atmospheric refraction). This
would result in a very good DOP value.The lower diagram illustrates
poor satellite geometry. In this case, all of the satellites are
clustered together. This would result in a poor DOP value.A low
numeric Dilution of Precision value represents a good satellite
configuration, whereas a higher value represents a poor satellite
con- figuration. The DOP at any given moment will change with time
as the satellites move along their orbits.
*Dilution of Precision (DOP)There are a number of Dilution of
Precision components. The overall GDOP, or Geometric Dilution of
precision includes:PDOP, or Precision Dilution of precision,
probably the most commonly used, which is the dilution of precision
in three dimensions. Some- times called the Spherical DOP.HDOP, or
Horizontal Dilution of Precision, is the dilution of precision in
two dimensions horizontally. This value is often lower (meaning
"better") than the PDOP because it ignores the vertical
dimension.VDOP, or Vertical Dilution of precision, is the dilution
of precision in one dimension, the vertical.TDOP, or Time Dilution
of Precision, is the dilution of precision with respect to time.A
DOP value of less than 2 is considered excellent-about as good as
it gets, but it doesn't happen often, usually requiring a clear
view of the sky all the way to the horizon. DOP values of 2 to 3
are considered very good. DOP values of 4 or below are frequently
specified when equipment accuracy capabilities are given.DOP values
of 4 to 5 are considered fairly good and would normally be
acceptable for all but the highest levels of survey precision
requirements. A DOP value of 6 would be acceptable only in low
precision conditions, such as in coarse positioning and navigation.
Position data generally should not be recorded when the DOP value
exceeds 6,