Embed Size (px)
Citation preview

0-01
ULTRALIGHT ROBOT GRIP
Catalogue:
011417
NEW

0-03© System patented by MISATI
Company / Services
ABOUT US
As specialists in automating
production processes for the
automobile industry, Misati can
help you to achieve the maximum
productivity of your robot grips
with the minimum investment.
From the design to the start-up
of the ultralight robot grip, Misati
can be with you every step of the
process. We can give you technical
advice and our know-how to get
the highest production.
QUALITY PRODUCT
Misati’s pneumatic fastening
elements are guaranteed for
7 years or 20 million cycles.
Quality means less number of spare parts.
PATENTED TECHNOLOGY
Would you like to know the
most advanced and modern
technology in grips? Misati’s
R&D Dept. designs and develops all our
components. All Misati’s technology is
patented.
OWN PRODUCTION
Thanks to our mass production,
with state-of-the-art CNC ma-
chines, we can off er the best
quality at the best price.
DISTRIBUTION NETWORK
We have a worldwide sales net-
work. Please, visit our website
www.misati.com to contact our
sales engineer in your area.
TRAINING CENTRE
We provide technical training
for automating and integration
companies. We focus on how
to get the maximum productivity and
reliability when handling parts with
ultralight grips.
MISATI, S.L.
Av. de la Riera, 15
E-08960 Sant Just Desvern
Barcelona – Spain
Tel. +34 93 440 47 27
wwww.misati.com

0-04 © System patented by MISATI 0-05© System patented by MISATI
Ultralight Robot Grip
HIGHER PRODUCTION
• Thanks to the low weight of these new
robot grips, you will be able to use
smaller & more productive robots.
• Although a robot works at high speed,
being therefore subjected to high acce-
lerations, the high fastening force of our
pneumatic miniclamps will enable it to
fasten any sheet safely.
• As electrical cables and pneumatic tubes
are protected -always within easy reach-
the ultralight grip helps to reduce the
typical incidents or production stoppa-
ges caused by cable breakage.
LOWER COST
• The ultralight robot grip is made up of
less elements, which are moreover
cheaper.
• As the ultralight grip weighs less, it can
be used on smaller and cheaper robots.
NO ADJUSTMENT NEEDED
• Diffi cult and never-ending adjustments
are over. We will delivery your robot grip
assembled, preadjusted and verifi ed,
ready to be used.
A NEW CONCEPT
OF ROBOT GRIP
Misati has many years of experience
designing and manufacturing tubular robot
grips for the automobile industry.
These are very complex and sturdy grips,
as they must withstand such tough envi-
ronments as resistance and arc welding.
However, there are many processes where
such heavy and large grips slow down pro-
duction and raise the price of the project.
This is why Misati has developed the new
ultralight robot grips, which are just as
reliable and accurate but more productive
and cheaper than tubular ones.

0-06 © System patented by MISATI 0-07© System patented by MISATI
Ultralight Robot Grip
Technopolymer is a glass fi bre
polyamide that stands out because
of its attributes:
MECHANICAL PROPERTIRES
• High stiff ness, toughness and
compactness
• Good performance: static & dynamic
loads and vibrations
• Improved dimensional stability
• Good elasticity under fatigue and creep
• Impact resistance
• High tensile strenght. Lower wear
• Repeated production
PHYSICAL PROPERTIES
• Density = 1,56 kg/dm3
• Chemical resistance to solvents, fl uents,
oils, etc.
• Electrical insulator
• Flame-retardant. Heat resistance (above
120°C)
• Good mechanization
• Easy to maintain
ENVIRONMENTAL FRIENDLY
• Reciclable and pollution-free
• Minor energy consumption than steel or
aluminium mountings
NEW GENERATION OF
TECHNOPOLYMER
MOUNTINGS
As our brackets and mountings are
manufactured in technopolymer, our new
Ultralight Robot Grip has had a drastic
reduction in weight (-55,96%) compared to
the traditional tubular grips.
CHARACTERISTICS OF TECHNOPOLYMER
The result is a lighter and cheaper grip
which is simpler to design & assemble and
more accurate to adjust.

0-08 © System patented by MISATI 0-09© System patented by MISATI
Ultralight Robot Grip
PNEUMATIC CLAMPS
FOR ROBOT GRIPS
Normally, there is no free space in tools.
When a robot grip goes in or out from the
tool, it is likely that its terminal elements
(clamps) collide with some element on the
tool.
Which could be the solution?
Misati’s clamps for robot grips are small,
light and compact. With a very high holding
force -up to 292 daN- they can fasten large
and heavy parts, such as the side panel of
a car.
NON-REVERSIBILITY:
Even though air is missing, Misati’s clamps won’t open and will continue doing the same force.
FULLY RELIABLE:
Sensors can control the presence of the part as well as detect if the clamp is open or closed.
FULL PROTECTION:
Production stoppages are reduced because rear connections are away from the working area and Misati’s grips house all cables and pneumatic tubes through the insi-de of mountings, brackets, tubes and profi les.
ADAPTABLE TO ANY PART:
Misati has a wide range of standard gripper fi ngers, which can better adapt to the shape and size of the sheet. It is therefore easier to design a grip (less engineering hours).
GUARANTEE:
Thanks to a machined-and-treated-steel body, a high airtight pneumatic cylinder and a force mechanism designed with rolling elements, Misati’s clamps are guaranteed for 7 years or 20 million cycles. Therefore, less spare parts will be needed.
292 daN
Even when the robot works
at high accelerations, Misati’s
clamps will fasten parts safely,
accurately and reliably.

0-10 © System patented by MISATI 0-11© System patented by MISATI
Ultralight Robot Grip
NO ADJUSTMENT NEEDED
Adjusting a traditional tubular robot grip
can last many hours, even days. During
those hours, the robot will remain stopped
without manufacturing anything.
If we add the travelling expenses and the
hours spent in the adjustment, which will
be the real price paid by the stamping
company for a grip?
Is there an easier way to put a grip into
operation without stopping production for
days?
Would it be possible to receive a preadjus-
ted grip that would just need to be
connected to start to manufacture?
Misati’s Ultralight Robot Grips are delive-
red assembled. No adjustment is needed.
Misati has a team of technicians who are
expert on diff erent areas. They will design,
assemble, adjust and verify the geometry
of your Ultralight Transfer.
Expensive and never-ending
adjustments are over.
Misati will deliver an assembled,
preadjusted and verifi ed grip,
ready to be used.

0-12 © System patented by MISATI 0-13© System patented by MISATI
12
34
56
7
Index Index
2
1
3
4
6
7
5
ASSEMBLIES 1-01
MINICLAMPS 2-01
SUCTION PADS 3-01
MOUNTINGS (MOUNTINGS, TUBES, BRACKETS, etc...) 4-01
STRUCTURAL PROFILES 5-01
APPLICATIONS 6-01
TRAINING CENTRE 7-01
ASSEMBLIES 1-01
Examples of Applications 1-03
MINICLAMPS 2-01
Which miniclamp should I use? 2-03
Ordering Information 2-05
Hot Stamping Clamp 2-06
Miniclamp - GL-...-RG/RG1-S0 2-07
Miniclamp - GC-...-RG/RG1-S0 2-09
Miniclamp - GL-...-SC/SCL-S0 2-11
Miniclamp - GC-...-SC/SCL-S0 2-13
Centring Miniclamp - CR-...-S0 2-15
Ball-Ended Screw 2-17
Jaw Block 2-19
Centring Guide Bushing 2-20
Shim Kit 2-21
Opening/Closing Clamp Detection 2-22
Sheet Detector 2-23
Lateral Sheet Detector 2-24
Cable & Connector 2-25
Mechanical Spare Parts 2-27
Pneumatic Spare Parts 2-28
SUCTION PADS 3-01
Round Suction Pad 3-03
Oval Suction Pad 3-04
Spring Plunger 3-05
Suction Pad Connection 3-06
MOUNTINGS 4-01
Which Structure Should I Use? 4-03
Tube Mounting 4-05
Tube 4-07
Parallel Bracket 4-09
Displacement Parallel Bracket 4-11
Rotary Bracket 4-13
STRUCTURAL PROFILES 5-01
Pneumatic Connections 5-03
Electrical Connections 5-04
Profi le 5-05
Profi le Elements 5-06
Cover 5-07
Square Elbow 5-08
Fastening Plate 5-09
Pneumatic Plate 5-10
Electrical Connector 5-11
Pneumatic Components 5-13
APPLICATIONS 6-01
TRAINING CENTRE 7-01

Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 1-01 1-02
1ASSEMBLIES

1
1-04
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
1
1-03
ASSEMBLIES - Examples of ApplicationsASSEMBLIES - Examples of Applications
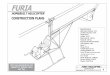
Assembly Nr. 1 Assembly Nr. 2
Assembly Nr. 3
NEW NEW
SPT-30(ch. 4)
TUBA-30X4-L(ch. 4)
P-65X90A-LTAP-30X80A-L(ch.5)
UPLR-30-30-T (ch.4)
GC-20-RG-S0 (ch. 2)
SVT-30(ch.4)
TUBAC-30X4-350-400(ch. 4)
UPLR-30-30-T (ch. 4)
GL-20-RG-S0(ch.2)
P-65X90A-LTAP-30X80A-L(ch.5)
SPT-30(ch. 4)
TUBAC-30X4-350-400(ch. 4)
UPLR-30-30-ZT (ch. 4)
GL-20-RG-S0(ch.2)
P-65X90A-LTAP-30X80A-L(ch. 5)

1
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 1-061-05
Assembly Nr. 4 Assembly Nr. 5
Assembly Nr. 6
ASSEMBLIES - Examples of ApplicationsASSEMBLIES - Examples of ApplicationsNEW NEW
P-65X90A-LTAP-30X80A-L(ch.5)
SPT-30(ch. 4)
TUBAC-30X4-350-400(ch.4)
UCTR-30-30-T(ch. 4)
GL-20-RG-S0(ch.2)
TUBAC-30X4-350-400(ch. 4)
UPLR-30-30-ZT (ch. 4)
FSTI-38(ch.3)
SVT-30(ch.4)
P-65X90A-LTAP-30X80A-L(ch. 5)
MVRP-125(ch. 3)
UP(c
SVT-30(ch. 4)
UCTR-28-30(ch.4)
P-65X90A-LTAP-30X80A-L(ch.5)
HTS-38(ch.3)
MVRP-125(ch. 3)
TUBA-30X4-L(ch. 4)

2
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-01
MINICLAMP
2-02
Hot Stamping Clamp Miniclamp GL -...-RG/RG1-S0 Miniclamp GC -...-RG/RG1-S0 Miniclamp GL -...-SC/SCL-S0 Miniclamp GC -...-SC/SCL-S0 Centring Miniclamp CR-...-S0
Ball-Ended Screw Jaw Block Centring Guide Bushing Shim Kit Opening/Closing Clamp Detection Sheet Detector Lateral Sheet Detector Cable & Connector Mechanical Spare Parts Pneumatic Spare Parts

2
2-04
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-03
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
2
MINICLAMPS - Which miniclamp should I use?MINICLAMPS - Which miniclamp should I use?
TYPEPISTON
DIAMETERCLAMPING
FORCEOPENING
POSITION OF SHEET
MOVING ARM
WIDTH(mm)
PAGE TYPEPISTON
DIAMETERCLAMPING
FORCEOPENING
POSITION OF SHEET
MOVING ARM
WIDTH(mm)
PAGE
GL-...-RG-S0GL-...-RG1-S0
Ø20Ø32
162 daN292 daN
90º HORIZONTAL 1 15...70 2-07
GC-...-RG-S0GC-...-RG1-S0
Ø20Ø32
162 daN182 daN
90º VERTICAL 1 15...70 2-09
GC-...-SC-S0GC-...-SCL-S0
Ø20Ø32
103 daN182 daN
14º+14º45º+45º90º+90º
VERTICAL 2 20...32 2-13
GL-...-SC-S0GL-...-SCL-S0
Ø20Ø32
162 daN292 daN
90º HORIZONTAL 1 13...40 2-11
CR-32-S0 Ø32 43.4 daNVERTICAL
TRANSVERSE2-15

GRIPPER FINGERS CAN BE COMBINED AS DESIRED (pages 2-17 to 2-19)
2-06
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-05
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Examples of applications
2
EE-XX4/XX9
MINICLAMPS - Hot Stamping ClampMINICLAMPS - Ordering Information
Thermal Protective Coating
made of fl uoropolymer (Tefl on).
Viton O-rings
Viton is a material which
endures high temperatures.
Bearings
prepared and reinforced to
better withstand heat.
All Minipincers can work under hot stamping conditions
Rear Connections
away from the heat source.
GL-20-RG (EE-204/209)
HOT STAMPING CLAMP
MODEL OF THE PINCERGL2, GC2, CR2
PISTON DIAMETER20, 32
TYPE OF GRIPPER FINGER
Prepared for transferring sheets up to 1.000 ºC
TYPE OF GRIPPER FINGER
RG, RG1, SC, SCL
GL- 20 - RG - S0
WITHOUT SENSORS0
RG RG1 SC SCL
GC-20-RG (EE-254/259) GL-20-SC (EE-204/209)

2-08
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-07
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Bolts included
Material: Technopolymer
222
MINICLAMPS - GL-...-RG/RG1-S0 MINICLAMPS - GL-...-RG/RG1-S0
Working pressure: 6 bar (maximum: 10 bar)
Material: Machined & hardened carbon steel
JK
Ølh8
.
AF H G
BC
LL
MN P
90º
OE
D
Available for hot stamping applications.
GL-20-RG-S0GL-32-RG-S0
GL-20-RG1-S0GL-32-RG1-S0
9º
Ribbed Ball-Ended Screw
TYPE FASTENING TORQUE CLAMPING FORCE PISTON CONSUMPTION WEIGHT
GL-20-RG-S0 60 Nm 162 daN Ø20 16.2 cm3 0.80 kg
GL-20-RG1-S0 60 Nm 162 daN Ø20 16.2 cm3 0.80 kg
GL-32-RG-S0 150 Nm 292 daN Ø32 59 cm3 1.65 kg
GL-32-RG1-S0 150 Nm 292 daN Ø32 59 cm3 1.65 kg
GL-20-RG-S0GL-32-RG-S0
GL-20-RG1-S0GL-32-RG1-S0
SI-... (ch. 2)
Optional lateral sensor. Assembly on one of the two sides Sensor lateral opcional
TYPE A B C D E F G H ØI j K L M N O P
GL-20-RG-S0 154,5 70 53,5 63,5 37 32 17 30 28 13 M5 10 35 13,5 M8X40 31,5
GL-20-RG1-S0 154,5 70 53,5 63,5 37 32 13 28 13 M5 10 35 13,5 M10X50 31,5
GL-32-RG-S0 209,5 91 78 87,9 51,4 42 23 40 40 22 G1/8 12 52 23 M8X40 45,9
GL-32-RG1-S0 209,5 91 78 87,9 51,4 42 17 40 22 G1/8 12 52 23 M10X50 45,9

2-10
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-09
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
2
MINICLAMPS - GC-...-RG/RG1-S0 MINICLAMPS - GC-...-RG/RG1-S0
J
Ølh8
N
BC
ED
A
O
M
K L
= =
14º
.F H G
Available for hot stamping applications.
Working pressure: 6 bar (maximum: 10 bar)
Material: Machined & hardened carbon steel
9º
Ribbed Ball-Ended Screw
TYPE FASTENING TORQUE CLAMPING FORCE PISTON CONSUMPTION WEIGHT
GC-20-RG-S0 60 Nm 103 daN Ø20 16.2 cm3 0.80 kg
GC-20-RG1-S0 60 Nm 103 daN Ø20 16.2 cm3 0.75 kg
GC-32-RG-S0 150 Nm 182 daN Ø32 59 cm3 1.50 kg
GC-32-RG1-S0 150 Nm 182 daN Ø32 59 cm3 1.35 kg
TYPE A B C D E F G H ØI J K L M N O P
GC-20-RG-S0 188 70 111.5 31.5 26.5 32 17 30 28 13 10 32 12 M5 M8X30 22
GC-20-RG1-S0 188 70 111.5 31.5 26.5 32 28 13 10 32 12 M5 M10X40 22
GC-32-RG-S0 260 91 160.4 45.9 36.5 42 23 40 40 22 12 42 18 G1/8 M8X30 30
GC-32-RG1-S0 260 91 160.4 45.9 36.5 42 40 22 14 42 18 G1/8 M10X40 30
GC-20-RG-S0GC-32-RG-S0
GC-20-RG1-S0GC-32-RG1-S0
GC-20-RG-S0GC-32-RG-S0
GC-20-RG1-S0GC-32-RG1-S0
SI-... (ch. 2)
Optional lateral sensor. Assembly on one of the two sides Sensor lateral opcional

2
2-12
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-11
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
2
MINICLAMPS - GL-...-SC/SCL-S0MINICLAMPS - GL-...-SC/SCL-S0
Working pressure: 6 bar (maximum: 10 bar)
Material: Machined & hardened carbon steel
JK
Ølh8
.
Q AF H G
BC
LL
M
R
P
90º
OE
D
A-SC-... / GBK-...
A-SCL-... / GBK-...
SI-... (ch. 2)
Available for hot stamping applications.
Optional lateral sensor. Assembly on one of the two sides
TYPE FASTENING TORQUE CLAMPING FORCE PISTON CONSUMPTION WEIGHT
GL-20-SC-S0 60 Nm 162 daN Ø20 16.2 cm3 0.80 kg
GL-20-SCL-S0 60 Nm 162 daN Ø20 16.2 cm3 0.80 kg
GL-32-SC-S0 150 Nm 292 daN Ø32 59 cm3 1.65 kg
GL-32-SCL-S0 150 Nm 292 daN Ø32 59 cm3 1.65 kg
GL-20-SC-S0GL-32-SC-S0
GL-20-SCL-S0GL-32-SCL-S0
TYPE A B C D E F G H ØI J K L M N O P Q R S
GL-20-SC-S0 154.5 70 53.5 63.5 37 32 17 30 28 13 M5 10 35 17 M6X20 31.5 9 3 22
GL-20-SCL-S0 154.5 70 53.5 63.5 37 32 17 13 28 13 M5 10 35 17 M6X20 31.5 9 3 22
GL-32-SC-S0 209.5 91 78 87.9 51.4 42 23 40 40 22 G1/8 12 52 25 M8x25 45.9 11 3 30
GL-32-SCL-S0 211.5 91 78 87.9 51.4 42 23 17 40 22 G1/8 14 52 25 M8X25 45.9 11 3 30
GL-20-SC-S0GL-32-SC-S0
GL-20-SCL-S0GL-32-SCL-S0

2
2-14
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-13
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
2
MINICLAMPS - GC-...-SC/SCL-S0 MINICLAMPS - GC-...-SC/SCL-S0
A-SC-... / GBK-...
.
F H G
J
Ølh8
N
BC
ED
O
G
A
Ø
M
K LQ
14º
Available for hot stamping applications.
Working pressure: 6 bar (maximum: 10 bar)
Material: F-114 machined & hardened steel
A-SC-... / GBK-...
GC-20-SC-S0GC-32-SC-S0
GC-20-SCL-S0GC-32-SCL-S0
TYPE FASTENING TORQUE CLAMPING FORCE PISTON CONSUMPTION WEIGHT
GC-20-SC-S0 60 Nm 103 daN Ø20 16.2 cm3 0.80 kg
GC-20-SCL-S0 60 Nm 103 daN Ø20 16.2 cm3 0.90 kg
GC-32-SC-S0 150 Nm 182 daN Ø32 59 cm3 1.50 kg
GC-32-SCL-S0 150 Nm 182 daN Ø32 59 cm3 1.60 kg
TYPE A B C D E F G H ØI J K L M N O P Q R
GC-20-SC-S0 188 70 111,5 31.5 26.5 32 17 30 28 13 10 32 12 M5 M6X20 22 3 9
GC-20-SCL-S0 205 70 111.5 31.5 26.5 32 17 13 28 13 10 32 12 M5 M6X20 22 3 9
GC-32-SC-S0 260 91 160.4 45.9 36.5 42 23 40 40 22 12 42 18 G1/8 M8X25 30 3 11
GC-32-SCL-S0 283 91 160.4 45.9 36.5 42 23 17 40 22 14 42 18 G1/8 M8X25 30 2 11
GC-20-SC-S0GC-32-SC-S0
GC-20-SCL-S0GC-32-SCL-S0
SI-... (ch. 2)
Optional lateral sensor. Assembly on one of the two sides Sensor lateral opcional

2
2-16
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-15
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
2
MINICLAMPS - Centring Miniclamp CR-...-S0MINICLAMPS - Centring Miniclamp CR-...-S0
TYPE FASTENING TORQUE CLAMPING FORCE PISTON CONSUMPTION WEIGHT
CR-32-S0 43.4 daN 37.7 daN Ø32 59 cm3 1.60 kg
N
BW
Z2
A
C
L
D
G
M O
PQ
R
F
J
Ølh8
Øz1H6
.
.
ØU(X4)SH7
ØV f7
ØT (X4)ØK f7
HH7
E
E
Working pressure: 6 bar (maximum: 10 bar)
Material: F-114 machined & hardened steel
Non-rotating ± 0.1º
Available for hot stamping applications.
SI-... (ch. 2)
Optional lateral sensor. Assembly on one of the two sides
CR-32-S0
TYPE A B C D E F G H ØI J K L M N O P Q R S T U V W X Y Z Z
CR-32-S0 240 91 114 40 42 15 22 10 40 22 40 M6 35 G1/8 2 55 17.5 9.5 11 5 M5 25 20 25 30 9x2.1 M6x7

2
2-18
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-17
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Examples of applications
2
MINICLAMPS - Ball-Ended Screw
R... R...
RGD-...
RN-...
RP-... RN-... RGD-... RG-... RGI-...
For very delicate pieces, it is
recommended to use the Flat
Ball-Ended Screw RP-... or RGD-...
(1)For complex shaped sheets, it is recom-
mended to use the Ball-Ended Screw
RGI-.
MINICLAMPS - Ball-Ended Screw
Bolts included
Material: hardened steel & Delrin (RGD-...) Material: hardened steel (RP-..., RG-..., RGI-..., RN-...) Material: neoprene (RN-...)
For very delicate pieces, it is recommended
to use the Flat Ball-Ended Screw RP-..., RN-... or RGD-...
RP-... RGD-... RG-... RGI-...
RP-...
ØB
E
D Cº
Cº
ØA
+ 0.05+ 0.03
Weight (kg)
RP-08/D 0.030-0.034
RP-10/D 0.063-0.072
RGD-20 0.011
RGD-32 0.021
RG-20 0.012
RG-32 0.022
RG-20-30 0.01
RG-32-40 0.02
RGI-20 0.01
RGI-32 0.02
RN-08/D 0.030-0.034
RG
TYPE A B C
RG-20 M8 40 9
RG-32 M10 50 9
RG-20-30 M8 30 9
RP
TYPE ØA B C D
RP-08/D 16 M8 9 48 63
RP-10/D 20 M10 11 54 64 84
RGD
TYPE A B C
RGD-20 M8 41.6 0
RGD-32 M10 51.9 0
RN
TYPE A B C D
RN-08/D 16 M8 18 43
RGI
TYPE A ØB C D E
RGI-20 8 5 9 12 6
RGI-32 M10 6 9 14 6
RN-...
B
D
C
ØA
5º
CºCº
A
B
D
C
ØA
B
Ribbed surface:
RG-... RGI-...
Flat surface:
RP-... RN-... RGD-...

2
2-20
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-19
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Examples of applications Examples of applications
2
CC-...
MINICLAMPS - Centring Guide Bushing
ØA h6
ØB
C
It is recommended to use centring
guide bushings (CC-...) in order to
withstand lateral forces and to
precisely place couplings and
mountings.
Weight (kg)
CC-20 0.01
CC-32 0.01
CC-SC-20 0.02
CC-SC-32 0.02
Material: F-114 machined
TYPE ØA ØB C
CC-20 7 5.1 4
CC-32 9 6.1 4
CC-SC-20 7 5.1 5
CC-SC-32 9 6.1 5
SC-...
MINICLAMPS - Jaw Block
A
F
C
GB
3.1
= =
D.
ØE H8
TYPE A B C D ØE F G
SC-A-20 50 13 30 17 9 M6 13
SC-A-32 35 17 40 23 11 M8 17
SC-AL-20 50 13 30 17 9 M6 13
SC-AL-32 70 17 40 23 11 M8 17
Area to be machined by the customer according to the surface to fasten.

2-22
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-21
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Examples of applications
2
Examples of applications
GBK-...
MINICLAMPS - Shim Kit
C
D
BATh
ickn
ess
Adjustment of 0 to 2mm can be made on jaw blocks SC-... with the shims in this kit (GBK-...).
TYPE A B C D THICKNESS
GBK-20 30 17 13 9.2 0.1 0.2 0.3 0.5 1
GBK-32 40 23 17 11.2 0.1 0.2 0.3 0.5 1
GBK-20 GBK-32
SI-...
MINICLAMPS - Opening/Closing Clamp Detection
Weight (kg)
SI-20 0.02
SI-20N 0.02
SI-32 0.02
SI-32N 0.02
Bolts included
Material: PA6 IP65
NP
N
-
-
+
+
0C
Electrical connections
End position signaling of the arm
PN
P
(1)
(1)
(2)
(2)
(4)
(4)
(3)
(3)
0 C
F
F
D CA
E B
D C
E B
A
SI-20, SI-20N
SI-32, SI-32NBNWHBKBU
PNP
TYPE A B C D E F
SI-20 42.2 26 8 110 M12X1 M4
SI-32 57.7 41 16 10 M12X1 M4
NPN
TYPE A B C D E F
SI-20N 42.2 26 8 110 M12X1 M4
SI-32N 57.7 41 16 10 M12X1 M4

2
2-24
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-23
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Example of applicationExample of application
Bolts & Terminal Strip included
MINICLAMPS - Lateral Sheet Detector
TYPE A B C D SENSING DISTANCE
SL-20-R 69 42.5 30 14 4 mm
SL-20N-R 69 42.5 30 14 4 mm
SL-32-R 93 60.5 38.6 14 4 mm
SL-32N-R 93 60.5 38.6 14 4 mm
A
B
CD
(1) BN
(1) BN
(4) BK
(4) BK
(3) BU
(3) BU
+
-
PN
PN
PN
+(SL-20-R / SL-32-R)
SI-GL...
MINICLAMPS - Sheet Detector
TYPE A B C SENSING DISTANCE
SI-GL 27 12 M8X1 2 mm
SI-GLN 27 12 M8X1 2 mm
Electrical connections Electrical connections
Terminal StripTerminal Strip
(1) BN
(1) BN
(4) BK
(4) BK
(3) BU
(3) BU
+
-
PN
PN
PN
-
+
SI-GLN
SI-GL-...
Weight (kg)
SL-20-R 0.05
SL-20N-R 0.05
SL-32-R 0.07
SL-32N-R 0.07
(SL-20N-R / SL-32N-R) Bolts & Terminal Strip included
Material: F114, PLA
SL-...-R
C
B
ANEW NEW

Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-25
2
2-26Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Example of application
CS-...
MINICLAMPS - Cable & Connector
H
L
H M4 BK4 BK
2 WH
1 BN 3 BU 3 BU 1 BN
2 WH
M
A
A
H
LL
MA
L
HA
B
L
MHA B
H8 BK
2 WH
1 BN 3 BU
M8 BK
3 BU 1 BN
2 WH
CS-008/L
CS-001/L CS-005/L
CS-002/L CS-003/L CS-006/L CS-007/L CS-008/L
CS-004/L
TYPE L A B
CS-001/… 600 1000 2000 M12X1 M12X1
CS-002/… 2000 M12X1
CS-003/… 2000 M12X1
CS-004/… 600 1000 2000 M12X1 M12X1
CS-005/… 600 1000 2000 M8X1 M12X1
CS-006/… 2000 M8X1
CS-007/… 2000 M8X1
CS-008/… 1000 M12X1
COMMENTS
Connectors without Led, with 4 poles, a degree of protection IP67 and cables ready for aggressive
environments (PUR)

2
2-28
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 2-27
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
2
KJ-...KM...
MINICLAMPS - Pneumatic Spare PartsMINICLAMPS - Mechanical Spare Parts
1 - Internal Bushing
2 - Bolt
3 - Bearings (x2)
1 - Internal Bushing (x2)
2 - Bolt
3 - Bearings (x2)
KM-...
KMC-...
1 - Guide
2 - O-ring (x3)
3 - Groove Ring
4 - Scraper Ring
5 - Piston
6 - Allen Screw
TYPE
KJ-20
KJ-32
KJ-40
2
331
2
3311
2
5
6
2
2
1- 4
3
TYPE MINICLAMPS
KM-20 GL-20-...-S0
KM-32 GL-32-...-S0
KMC-20 GC-20-...-S0
KMC-32 GC-32-...-S0

3-023-01
3SUCTION PADS Round Suction Pad
Oval Suction Pad
Spring Plunger
Suction Pad Connection

3
3-04
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 3-03
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
3
SUCTION PADS - Round Suction Pad
TYPE ØA B C D
STANDARD NBR 60
MVRP-30 32 20 17 G1/4”-HE
MVRP-40 42 22 17 G1/4”-HE
MVRP-50 52 28 22 G3/2”-HE
MVRP-60 63 31 22 G3/8”-HE
MVRP-80 83 35 22 G3/8”-HE
MVRP-100 103 36 22 G3/8”-HE
MVRP-125 128 43 22 G3/8”-HE
HIGH RESISTANCE TO WEAR
MVRP-15-VK 14.5 25.5 14 G1/8”-HE
MVRP-30-VK 30 29 14 G1/8”-HE
MVRP-50-VK 50 32 17 G1/4”-HE
MVRP-60-VK 60 33.5 17 G1/4”-HE
MVRP-80-VK 80 40 22 G1/4”-HE
MVRP-95-VK 95 40 22 G1/4”-HE
CONVEX OR VERY SENSITIVE SURFACES
MVRP-53-A 53.5 30.5 22 G3/8”-HE
MVRP-80-A 79.5 45.5 22 G3/8”-HE
TYPE ØA B C D
STANDARD NBR 60
MVRF-22 21 25 16 G1/4”-HE
MVRF-30 32 28 17 G1/4”-HE
MVRF-40 42 29 17 G1/4”-HE
MVRF-50 52 37 22 G3/8”-HE
MVRF-60 63 41.5 22 G3/8”-HE
MVRF-80 83 50 22 G3/8”-HE
MVRF-100 103 57 22 G3/8”-HE
MVRF-125 128 68 22 G3/8”-HE
HIGH RESISTANCE TO WEAR
MVRF-30-VK 29 42 17 G1/4”-HE
MVRF-40-VK 38 41 17 G1/4”-HE
MVRF-50-VK 47 47.5 17 G1/4”-HE
MVRF-60-VK 59 49 17 G1/4”-HE
MVRF-85-VK 84 62 17 G1/4”-HE
MVRF-110-VK 110 69 G1/2”-HE
FLAT SUCTION PAD (ROUND) MVRP-...
BELLOWS SUCTION PAD (ROUND) MVRF-...
B
D
e/c
C
Be/
c C
ØA
øA
D
SUCTION PADS - Oval Suction Pad
TYPE AxB C D E
STANDARD NBR 60
MVOF-30X60 32X62 34.5 17 G1/4”-HE
MVOF-40X80 42X82 37.2 17 G1/4”-HE
MVOF-55X110 57X112 43.5 22 G3/8”-HE
MVOF-70X140 72X143 47.5 22 G3/8”-HE
BELLOWS SUCTION PAD (OVAL) MVOF-...
E
TYPE AxB C D E
STANDARD NBR 60
MVOP-16X50 16X50 33 17 G1/4”-HE
MVOP-23X60 26X62 26 17 G1/4”-HE
MVOP-30X90 32X92 26 17 G1/4”-HE
MVOP-40X80 40X82 28 17 G1/4”-HE
MVOP-50X100 50X102 31 22 G3/8”-HE
MVOP-60X120 60X123 33 22 G3/8”-HE
MVOP-70X140 70X143 34 22 G3/8”-HE
CONVEX OR VERY SENSITIVE SURFACES
MVOP-20X60-A 21.5X61.5 29 17 G1/4”-HE
MVOP-30X80-A 31.3X81.3 32.5 22 G3/8”-HE
MVOP-40X95-A 41.3X96.5 35.5 22 G3/8”-HE
FLAT SUCTION PAD (OVAL) MVOP-...
e/c
D
e/c
D
C
C
AxB

3
3-06
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 3-05
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Examples of applications Examples of applications
3
FSTI-...
SUCTION PADS - Spring Plunger
Bolts included
Material: duraluminium
BG: rotation lock of the
suction pad
Stroke = Standard
Bolts included
Material: duraluminium
BG: rotation lock of the
suction pad
Stroke = Standard
FSTI-38 FSTI-38-BG HTS-38
TYPE A B C D E F G ØH
FSTI-38 188 19 91 50 3/8-MA 1/8-HE 25
FSTI-38-BG 188 19 91 50 3/8-MA 1/8-HE 25
FSTI-14 188 19 91 50 1/4-MA 1/8-HE 25
FSTI-14-BG 188 19 91 50 1/4-MA 1/8-HE 25
TYPE A B C D E F G ØH
HTS-38 67 40 12 15 3/8-MA 1/4-HE 80 28
HTS-14 67 40 12 15 1/4-MA 1/4-HE 80 28
Weight (kg)
FSTI-38 0.29
FSTI-38-BG 0.30
FSTI-14 0.29
FSTI-14-BG 0.30
Weight (kg)
HTS-38 0.16
HTS-14 0.16
F
STR
OK
ED
CB
E
AØ
H
G
SUCTION PADS - Suction Pad Connection
B
F
ØH
CD
A
E
HTS-14 FSTI-3
NEW NEW
STR
OK
E
HTS-...

4-024-01
4MOUNTINGSTube Mounting
Tube
Parallel Bracket
Displacement Parallel Bracket
Rotary Bracket

4
4-04
Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 4-03
4
20º
20º
20º
TYPE page
SPT-30 4-05
TUBAC-30X4-... 4-07
UPLR-28-30-T 4-10
TYPE page
SVT-30 4-06
TUBA-30X4-L 4-07
UPL-28-30-A 4-09
TYPE page
SPT-30 4-05
TUBAC-30X4-... 4-07
UPLR-28-30-ZT 4-12
TYPE page
SVT-30 4-06
TUBAC-30X4-... 4-07
UCTR-28-30-T 4-10
TYPE page
SPT-30 4-05
TUBA-30X4-L 4-07
UCTR-28-30-T 4-14
TYPE page
SVT-30 4-06
TUBA-30X4-L 4-07
UCT-28-30-L 4-13
TYPE page
SVT-30 4-06
TUBA-30X4-L 4-07
UPL-28-30-ZA 4-11
4-04
www.misati.com
MOUNTINGS - Which Structure Should I Use?NEW
20º

4-06
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 4-05
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Bolts included
Material: Technopolymer
Bolts included
Material: Technopolymer
Examples of applications Examples of applications
4
SPT-... SVT-...
MOUNTINGS - Tube Mounting MOUNTINGS - Tube MountingF
E
BC
D
ØA
TYPE ØA B C D E F
SPT-30 30 96 71 45 70 40
E
BC
D
M8X40DIN-912
F ØA
Weight (kg)
SPT-30 0.28
Weight (kg)
SVT-30 0.27
TYPE A B C D E ØF
SVT-30 30 70 45 45 70 40
NEW NEW

Ultralight Robot Grip
4-07Misati reserves the right to modify any characteristics of this catalogue.
Check the last stage of information in www.misati.com
MOUNTINGS - Tube
TUBA-... TUBAC-...
ØBL
ØA
Tubes can be supplied in cuts multiple of 10mm.
Tubes can be supplied in cuts multiple of 10mm.
TYPE ØA ØB
TUBA-30X4-L 30 24
ØB90º
400
ØA
350
Weight (kg/m)
TUBAC-30X4-350-400 0.88
Material: duraluminium
Weight (kg/m)
TUBA-30X4-L 0.88
Material: duraluminium
TYPE ØA ØB
TUBAC-30X4-350-400 30 22
RØB
NEW
4-08Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com

4-10
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 4-09
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Examples of applications Examples of applications
Bolts included
Material: Technopolymer & duraluminium
Bolts included
Material: Technopolymer & duraluminium
4
G
ØA
C
ØEØF
D
ØB ØA
C
D
ØF ØEØB
G20
º
MOUNTINGS - Parallel BracketMOUNTINGS - Parallel BracketNEW NEWUPL-... UPLR-...
TYPE ØA ØB C D ØE ØF G
UPL-28-30-A 28 30 86 121 36 36 25
UPL-40-30-T 40 30 86 130 39 49 25
TYPE ØA ØB C D ØE ØF G
UPLR-25-30-T 25 30 86 130 39 49 25
UPLR-28-30-T 28 30 86 130 39 49 25
UPLR-40-30-A 40 30 86 132 36 46 25
Weight (kg)
UPL-28-30-A 0.11
UPL-40-30-T 0.12
Weight (kg)
UPLR-25-30-T 0.20
UPLR-28-30-T 0.20
UPLR-40-30-A 0.20

4-12
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 4-11
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Examples of applications Examples of applications
Bolts included
Material: Technopolymer & duraluminium
Bolts included
Material: Technopolymer & duraluminium
4
ØA
C
ØGØF
D
ØB
G
H
I
MOUNTINGS - Displacement Parallel Bracket
UPL-...-Z... UPLR-...-Z...
ØA ØB
CD
ØEØF
GH
20º
I
MOUNTINGS - Displacement Parallel BracketNEW NEW
Weight (kg)
UPL-28-30-ZA 0.17
UPL-40-30-ZT 0.16
TYPE ØA ØB C D ØE ØF G H I
UPL-28-30-ZA 28 30 86 121 36 34 104 25 30
UPL-40-30-ZT 40 30 86 130 39 49 102 25 30
TYPE ØA ØB C D ØE ØF G H I
UPLR-25-30-ZT 25 30 86 130 39 49 102 25 30
UPLR-28-30-ZT 28 30 86 130 39 49 102 25 30
UPLR-40-30-ZA 40 30 86 132 36 56 104 25 30
Weight (kg)
UPLR-25-30-ZT 0.21
UPLR-28-30-ZT 0.21
UPLR-40-30-ZA 0.25

4-14
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 4-13
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Examples of applications
Bolts included
Material: Technopolymer & duraluminium
Bolts included
Material: Technopolymer & duraluminium
44
Ejemplo de aplicación
UCTR-...
MOUNTINGS - Rotary Bracket
UCT-...
MOUNTINGS - Rotary Bracket
Example of application Example of application
ØA ØB
LCC
ØAØB
L
TYPE ØA ØB C L
UCTR-25-30-T 25 30 25 49
UCTR-28-30-T 28 30 25 49
UCTR-40-30-L 30 30 25 56, 81, 106, 131
NEW NEW
TYPE ØA ØB C L
UCT-28-30-L 28 30 25 41, 66, 91, 116
UCT-40-30-T 40 30 25 44
Weight (kg)
UCT-28-30-L 0.16
UCT-40-30-T 0.18
Weight (kg)
UCTR-25-30-T 0.20
UCTR-28-30-T 0.20
UCTR-40-30-L 0.26

5-025-01
5STRUCTURAL PROFILESPneumatic Connections Electrical ConnectionsProfi leProfi le ElementsCoverSquare ElbowFastening PlatePneumatic PlateElectrical ConnectorPneumatic Components

5
5-04
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 5-03
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
STRUCTURAL PROFILES - Pneumatic Connections
Fastening PlatePBPT-0001
CoverTAP-65X90-PC
Profi le CoverTAP-30X80A-L
Pneumatic PlatePNP-01
TOP VIEW
Pneumatic connections
Electrical connections
STRUCTURAL PROFILES - Electrical Connections
Electrical ConnectorPEP-GV-001
Electrical ConnectorPEP-GV-001
Fastening PlatePBPT-0001
CoverTAP-65X90-PC
Profi le CoverTAP-30X80A-L
TOP VIEW
Pneumatic connections
Electrical connections
Pneumatic PlatePNP-01

5
5-06
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 5-05
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
5
P-...
STRUCTURAL PROFILES - Profi le STRUCTURAL PROFILES -Profi le Elements
TAP-... ARI....
A B
TYPE A B C D E
TAP-30X80A-L 39 1
Material: PVC
Material: steel
TYPE A B C ØD
ARI2634 6 25 13 M8
A B
C
ØD
P-30X80-L P-30X80A-L
A
L
P-65X90A-L
B
x
y
D
C
B
x
y
D
CB
D
C
P-30X80-L P-30X80A-L P-65X90A-L
lx (cm4) 6.86 119.47
ly (cm4) 55.89 61.48
wx (cm4) 26.55
wy (cm4) 18.92
Weight (kg/m) 2.2 2.1 4.6
Max. length (m) 3 3 3
Material: duraluminium
TYPE A B C D
P-30X80-L 80 30 45 8.2
P-30X80A-L 80 30 45 8.2
P-65X90A-L 90 65 45 8.2
NEW

5-08
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 5-07
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Bolts included
Material: Technopolymer
Bolts included
Material: Technopolymer
Examples of applications Example of application
5
STRUCTURAL PROFILES - Square Elbow
ESC-...
Weight (kg)
ESC-40-T 0.11
TYPE A B C D E
ESC-40-T 78 40 45 27.5 40
TYPE A B C
TAP-30X80E 30 2 80
TAP-65X90-PC 65 3 90
BA
==
CTAP-30X80E TAP-65X90-PC
A
B
C
D
E
NEW NEWSTRUCTURAL PROFILES - Cover
TAP-...

5-10
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 5-09
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Bolts included
Material: Technopolymer
Example of application
STRUCTURAL PROFILES - Fastening Plate
PBPT-...
TYPE A B C D E F
PBPT-0001 80 80 54 45 40 13
Weight (kg)
PBPT-0001 0.10
A FC
BD
ENEW
Bolts included
Example of application
5
STRUCTURAL PROFILES - Pneumatic Plate
PNP-...
A
B
D
E
F
G
C
TYPE A B C D E F G
PNP-01 70 66 45 41 12 6 8
Weight (kg)
PNP-01 0.15
NEW

5-12
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 5-11
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
Example of applicationExample of application
Bolts included
5
PEP-...
STRUCTURAL PROFILES - Electrical Connector
TYPE A B C D E
PEP-GV-001 36.5 60 70 33 45
Weight (kg)
PEP-GV-001 0.21
BD
A
C
M8x25
8 pins
8 pins
E
PEP-...
STRUCTURAL PROFILES - Electrical Connector
TYPE A B C D E
PEP-GV-H-002 87.6 33.4 28 83 27
A D
BE
C
female connector
male connector
Harting to be determined by the customer
Harting to be determined by the customer
NEW NEW

5
5-14
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 5-13
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
5
STRUCTURAL PROFILES - Pneumatic Components
Material: Technopolymer & brass, NBR
TYPE ØA B
RCH-1/4-8 8 G1/4
TYPE ØA B
RC-1/8-8 8 G1/8
RC-M5-4 4 M5
RC-1/4-8 8 G1/4
RCM-1/4-6 6 G1/4
Flow Regulator
Female Elbow Fitting
Fitting
Male Elbow Fitting
TYPE ØA B
REG -M5-4 4 M5
REG -1/8-6 6 G1/8
B
ØA
STRUCTURAL PROFILES - Pneumatic Components
TYPE ØA B
RTM-1/4-6 6 G1/4
TYPE ØA
Y-6-6 6
TYPE B
TAP - 1/8 G1/8
ØBØA
Reducer
T-Fitting
Y-Fitting
Cap
Tube
TYPE ØA ØB
RR-6-4 4 6
TYPE ØA COLOUR
T-4-A 4 BLUE
T-6-A 6 BLUE
T-8-A 8 BLUE
T-4-N 4 BLACK
T-6-N 6 BLACK
T-8-N 8 BLACK
B
ØA
25 m
B=thread
B
ØA
ØAØ
AØ
A
B
ØA
ØA
B
B
ØA
TYPE ØA B
R-M5-4 4 M5
R-M5-6 6 M5
R-1/8-4 4 G1/8
R-1/8-6 6 G1/8
R-1/8-8 8 G1/8

6-026-026-01
6APPLICATIONS

6-04
Ultralight Robot Grip Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 6-03
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com
APPLICATIONS APPLICATIONS
6

02
Ultralight Robot Grip
Misati reserves the right to modify any characteristics of this catalogue.Check the last stage of information in www.misati.com 7-02
7
7-01
TRAINING CENTRE - Training Centre
We provide technical training for
engineers and robot integrators & users
in order that they can learn to design
lighter and more productive robot grips.
Misati, S.L.
Av. de la Riera, 15E-08960 Sant Just DesvernBarcelona - SpainTel. +34 93 440 47 [email protected] - www.misati.com

03
Misati, S.L.
Av. de la Riera 15E-08960 Sant Just Desvern
Barcelona – SpainTel. +34 93 440 47 27
[email protected] - wwww.misati.com