Embed Size (px)
Citation preview

Foundations ofHuman MovementCHAPTER 1Basic Terminology
CHAPTER 2Skeletal Considerations for Movement
CHAPTER 3Muscular Considerations forMovement
CHAPTER 4Neurological Considerationsfor Movement
S E C T I O N I


3
1
After reading this chapter, the student will be able to:
1. Define mechanics, biomechanics, and kinesiology and differentiate among their usesin the analysis of human movement.
2. Define and provide examples of linear and angular motion.
3. Define kinematics and kinetics.
4. Explain the difference between relative and absolute reference systems.
5. Define how the mechanical properties of a structure can be expressed in terms of itsstress–strain relationship.
6. Define stress, strain, elastic region, plastic region, yield point, failure point, and elasticmodulus.
7. Describe the difference between an elastic and a viscoelastic material.
8. Differentiate between brittle, stiff, and compliant materials.
9. Define sagittal, frontal, and transverse planes along with corresponding frontal, sagit-tal, and longitudinal axes. Provide examples of human movements that occur in eachplane.
10. Explain degree of freedom and provide examples of degrees of freedom associatedwith numerous joints in the body.
11. Describe the location of segments or landmarks using correct anatomical terms, suchas medial, lateral, proximal, and distal.
12. Identify segments by their correct name, define all segmental movement descriptors,and provide specific examples in the body.
OBJECTIVES
I. IntroductionII. Core Areas of Study
A. Biomechanics vs KinesiologyB. Anatomy vs Functional AnatomyC. Linear vs Angular MotionD. Kinematics vs KineticsE. Statics vs Dynamics
III. Basic Structural AnalysisA. Stress–StrainB. Types of Materials
1. Elastic2. Viscoelastic
IV. Anatomical Movement DescriptorsA. Segment NamesB. Anatomical TermsC. Movement Description
1. Basic Movements2. Specialized Movement Descriptors
V. Reference SystemsA. Relative vs AbsoluteB. Planes and Axes
VI. Summary
P
Basic Terminology

can be qualitatively evaluated through visual observationby focusing on such things as whether the legs are togetherand straight, the back arched, the landing solid andwhether it was too fast or slow. But it is through the quan-titative analysis that the source of the movement, the mag-nitude of the forces generated, can be identified. A forcecannot be observed qualitatively, but knowing it is thesource of the movement will help with qualitative assess-ment of its effects, that is, the success of the handspring.
This chapter introduces terminology that will be usedthroughout the text. The chapter begins by defining andintroducing the various areas of study for movementanalysis. This will be the first exposure to the areas pre-sented in much greater depth later in the text. Next, it dis-cusses methods and terminology describing how we arriveat the basic mechanical properties of various structures.Finally, this chapter establishes a working vocabulary formovement description at both structural and whole-bodylevels.
Core Areas of Study
BIOMECHANICS VS KINESIOLOGY
Those who study human movement often disagree overthe use of the terms kinesiology and biomechanics.Kinesiology can be used in two ways. First, kinesiology asthe scientific study of human movement can be anumbrella term used to describe any form of anatomical,physiological, psychological, or mechanical human move-ment evaluation. Kinesiology also describes the content ofa class in which human movement is evaluated by exami-nation of its source and characteristics. Consequently, kine-siology has been used by several disciplines to describemany different content areas. Some departments of physi-cal education and movement science have gone so far as toadopt kinesiology as their department name. However, aclass in kinesiology may consist primarily of functionalanatomy at one university and strictly biomechanics atanother.
Historically, a kinesiology course has been part ofcollege curricula as long as there have been physical educa-tion and movement science programs. The course origi-nally focused on the musculoskeletal system, movementefficiency from the anatomical standpoint, and joint andmuscular actions during simple and complex movements.A typical student activity in the kinesiology course was toidentify discrete phases in an activity, describe the segmen-tal movements occurring in each phase, and identify themajor muscular contributors to each joint movement.Thus, if one were completing a kinesiological analysis ofthe act of rising from a chair, the movements would behip extension, knee extension, and plantarflexion viathe hamstrings, quadriceps femoris, and triceps suraemuscle groups, respectively. Most kinesiological analysesare considered qualitative because they involve observing a
Introduction
To begin or renew the study of kinesiology and biome-chanics using this textbook requires a fresh mind.Remember that human movement is the theme and thefocus of study in both biomechanics and kinesiology. Athorough understanding of various aspects of humanmovement may facilitate better teaching, successfulcoaching, more observant therapy, knowledgeable exer-cise prescription, or new research ideas. Movement is themeans by which we interact with our environment,whether it be simply to take a walk in a park, tostrengthen muscles in a bench press, to compete in thehigh jump at a collegiate track meet, or to stretch or reha-bilitate an injured joint. Movement, or motion, involvesa change in place, position, or posture relative to somepoint in the environment.
This textbook focuses on developing knowledge in thearea of human movement in such a manner that you willfeel comfortable observing human movement and solvingmovement problems. There are many approaches to thestudy of movement, such as observing movement usingonly the human eye and collecting data on movementparameters using laboratory equipment. Observers ofactivities also have different concerns: a coach may beinterested in the final outcome of a tennis serve, while atherapist may be interested in identifying where in theserve the athlete is placing the stress on the elbow with ten-dinitis. Some applications of biomechanics and kinesiologywill require only a cursory view of a movement, such asvisual inspection of the forearm position in the jump shot.Other applications, such as evaluating the forces applied bythe hand on the basketball during the shot, will requiresome advanced knowledge and the use of sophisticatedequipment and techniques.
Elaborate equipment is not needed to apply the mate-rial in this text, but it will be necessary to understand andinterpret numerical examples collected using such intricateinstruments. Qualitative examples in this text describe thecharacteristics of movement. A qualitative analysis is anonnumeric evaluation of motion based on direct obser-vation. These examples can be applied directly to a partic-ular movement situation using visual observation or video.
This text also presents quantitative information. Aquantitative analysis is a numeric evaluation of themotion based on data collected during the performance.For example, movement characteristics can be presentedto describe the forces or the temporal and spatial compo-nents of the activity. The application of this material to apractical setting, such as teaching a sport skill, is more dif-ficult, since it is more abstract and often cannot be visuallyobserved. However, quantitative information is veryimportant, since it substantiates what is seen visually in aqualitative analysis. It also directs the instructional tech-nique, because a quantitative analysis will identify thesource of a movement. For example, a front handspring
4 SECTION I Foundations of Human Movement

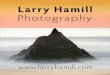
force between the foot and the floor, all of which acttogether to produce the movement up out of the chair.The components of a biomechanical and kinesiologicmovement analysis are presented in Figure 1-1. We nowexamine some of these components individually.
ANATOMY VS FUNCTIONAL ANATOMY
Anatomy, the science of the structure of the body, is thebase of the pyramid from which expertise about humanmovement is developed. It is helpful to develop a strongunderstanding of regional anatomy so that for a specificregion such as the shoulder, the bones, arrangement ofmuscles, nerve innervation of those muscles, blood supplyto those muscles, and other significant structures, such asligaments, can be identified. A knowledge of anatomy canbe put to good use if, for example, one is trying to assessan injury. Assume a patient has a pain on the inside of theelbow. One’s knowledge of anatomy allows one to recog-nize the medial epicondyle of the humerus as the promi-nent bony structure of the medial elbow. It also indicatesthat the muscles that pull the hand and fingers toward theforearm into flexion attach to the epicondyle. Thus, famil-iarity with anatomy may lead to a diagnosis of medial epi-condylitis, possibly caused by overuse of the hand flexormuscles.
Functional anatomy is the study of the body compo-nents needed to achieve or perform a human movementor function. Functional anatomy, used to analyze a dumb-bell lateral raise of the arm, identifies the deltoid, trapezius,levator scapulae, rhomboid, and supraspinatus muscles ascontributors to upward rotation and elevation of theshoulder girdle and abduction of the arm. Knowledge offunctional anatomy will be useful in a variety of situations,for example to set up an exercise or weight training pro-gram and to assess the injury potential in a movement orsport or when establishing training techniques and drillsfor athletes. The prime consideration of functionalanatomy is not the muscle’s location but the movementproduced by the muscle or muscle group.
movement and providing a breakdown of the skills andidentification of the muscular contributions to themovement.
The content of the study of kinesiology is incorporatedinto many biomechanics courses and is used as a precursorto the introduction of the more quantitative biomechani-cal content. In this text, biomechanics will be used as anumbrella term to describe content previously covered incourses in kinesiology, as well as content developed as aresult of growth of the area of biomechanics.
In the 1960s and 1970s, biomechanics was developedas an area of study in the undergraduate and graduatecurricula across North America. The content of biome-chanics was extracted from mechanics, an area of physicsthat consists of the study of motion and the effect offorces on an object. Mechanics is used by engineers todesign and build structures such as bridges and machinessuch as airplanes, since it provides the tools for analyzingthe strength of structures and ways of predicting andmeasuring the movement of a machine. It was a naturaltransition to take the tools of mechanics and apply themto living organisms. Thus evolved biomechanics, thestudy of the application of mechanics to biologicalsystems.
A biomechanical analysis evaluates the motion of a liv-ing organism and the effect of forces on the living organ-ism. The biomechanical approach to movement analysiscan be qualitative, with movement observed and described,or quantitative, meaning that some aspect of the move-ment will be measured. The use of the term biomechanicsin this text incorporates qualitative components with amore specific quantitative approach. In such an approach,the motion characteristics of a human or an object aredescribed using such parameters as speed and direction,how the motion is created through application of forcesboth inside and outside the body, and the optimal bodypositions and actions for efficient, effective motion. Forexample, to biomechanically evaluate the motion of risingfrom a chair, one attempts to measure and identify jointforces acting at the hip, knee, and ankle along with the
CHAPTER 1 Basic Terminology 5
FIGURE 1-1 Types of movement analysis. Movementcan be analyzed by assessing the anatomicalcontributions to the movement (functional anatomy),describing the motion characteristics (kinematics), ordetermining the cause of the motion (kinetics).

6 SECTION I Foundations of Human Movement
The center of mass of the body, of a segment, or of anobject is usually the point monitored in a linear analysis(Fig. 1-2). The center of mass is the point at which themass of the object appears to be concentrated, and it rep-resents the point at which the total effect of gravity acts onthe object. However, any point can be selected and evalu-ated for linear motion. In skill analysis, for example, it isoften helpful to monitor the motion of the top of the headto gain an indication of certain trunk motions. An exami-nation of the head in running is a prime example. Does thehead move up and down? Side to side? If so, it is an indi-cation that the central mass of the body is also moving inthose directions. The path of the hand or racket is impor-tant in throwing and racket sports, so visually monitoringthe linear movement of the hand or racket throughout theexecution of the motion is beneficial. In an activity such assprinting, the linear movement of the whole body is themost important component to analyze, since the object ofthe sprint is to move the body quickly from one point toanother.
The second type of motion is angular motion, whichis motion around some point so that different regions ofthe same body segment or object do not move throughthe same distance in a given amount of time. As illus-trated in Figure 1-3, swinging around a high bar repre-sents angular motion because the whole body rotatesaround the contact point with the bar. To make one fullrevolution around the bar, the feet travel through amuch greater distance than the arms because they are far-ther from the point of turning. It is typical in biome-chanics to examine the linear motion characteristics of anactivity and then follow up with a closer look at theangular motions that create and contribute to the linearmotion.
All linear movements of the human and objects pro-pelled by humans occur as a consequence of angularcontributions. The only exceptions to this rule aremovements such as skydiving or free falling, in whichthe body is held in a position to let gravity create the lin-ear movement downward, and when an external pull orpush moves the body or an object. It is important toidentify the angular motions and their sequence thatmake up a skill or human movement, because the angu-lar motions will determine the success or failure of thelinear movement.
Angular motions occur about an imaginary line calledthe axis of rotation. Angular motion of a segment, such asthe arm, occurs about an axis running through the joint.For example, lowering the body into a deep squat entailsangular motion of the thigh about the hip joint, angularmotion of the leg about the knee joint and angularmotion of the foot about the ankle joint. Angular motioncan also occur about an axis through the center of mass.Examples of this type of angular motion are a somersaultin the air and a figure skater’s vertical spin. Finally, angularmotion can occur about a fixed external axis. For example,the body follows an angular motion path when swinging
FIGURE 1-2 Examples of linear motion. Ways to apply linear motionanalysis include examination of the motion of the center of gravity or thepath of a projected object.
LINEAR VS ANGULAR MOTION
Two types of motion are present in a human movement oran object propelled by a human. First is linear motion,often termed translation or translational motion. Linearmotion is movement along a straight or curved pathway inwhich all points on a body or an object move the same dis-tance in the same amount of time. Examples are the pathof a sprinter, the trajectory of a baseball, the bar move-ment in a bench press, and the movement of the foot dur-ing a football punt. The focus in these activities is on thedirection, path, and speed of the movement of the bodyor object. Figure 1-2 illustrates two focal points for linearmovement analysis.

KINEMATICS VS KINETICS
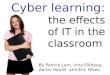
A biomechanical analysis can be conducted from either oftwo perspectives. The first, kinematics, is concerned withmotion characteristics and examines motion from a spa-tial and temporal perspective without reference to theforces causing the motion. A kinematic analysis involvesthe description of movement to determine how fast anobject is moving, how high it goes, or how far it travels.Thus, position, velocity, and acceleration are the compo-nents of interest in a kinematic analysis. Examples oflinear kinematic analysis are the examination of the pro-jectile characteristics of a high jumper and a study of theperformance of elite swimmers. Examples of angularkinematic analysis are an observation of the joint move-ment sequence for a tennis serve and an examination ofthe segmental velocities and accelerations in a verticaljump. Figure 1-4 presents both an angular (top) and lin-ear (bottom) example of the kinematics of the golf swing.By examining an angular or linear movement kinemati-cally, we can identify segments of a movement that requireimprovement or obtain ideas and technique enhance-ments from elite performers or break a skill down intoidentifiable parts. By each of these, we can further ourunderstanding of human movement.
Pushing on a table may or may not move the table,depending upon the direction and strength of the push. Apush or pull between two objects that may or may notresult in motion is termed a force. Kinetics is the area of
around a high bar, with the high bar acting as the axis ofrotation.
For proficiency in human movement analysis, it is nec-essary to identify the angular motion contributions to thelinear motion of the body or an object. This is apparent ina simple activity such as kicking a ball for maximum dis-tance. The intent of the kick is to make solid contactbetween a foot traveling at a high linear speed and mov-ing in the proper direction to send the ball in the desireddirection. The linear motion of interest is the path andvelocity of the ball after it leaves the foot. To create thehigh speeds and the correct path, the angular motions inthe kicking leg are sequential, drawing speed from eachother so that the velocity of the foot is determined by thesummation of the individual velocities of the connectingsegments. The kicking leg moves into a preparatoryphase, drawing back through angular motions of thethigh, leg, and foot. The leg whips back underneath thethigh very quickly as the thigh starts to move forward toinitiate the kick. In the power phase of the kick, the thighmoves vigorously forward and rapidly extends the leg andfoot forward at very fast angular speeds. As contact ismade with the ball, the foot is moving very fast becausethe velocities of the thigh and leg have been transferredto the foot. Skilled observation of human movementallows the relationship between angular and linearmotion shown in this kicking example to serve as a foun-dation for techniques used to correct or facilitate a move-ment pattern or skill.
CHAPTER 1 Basic Terminology 7
FIGURE 1-3 Examples of angular motion. Angular motion of the body, an object, or segment can take placearound an axis running through a joint (A), through the center of gravity (B), or about an external axis (C).

because forces cannot be seen (Fig. 1-5). Only the effectsof forces can be observed. Watch someone lift a 200-lbbarbell in a squat. How much force has been applied? Sincethe force cannot be seen, there is no way of accurately eval-uating the force unless it can be measured with recordinginstruments. A likely estimate of the force is at least 200 lb,since that is the weight of the bar. The estimate may be off
8 SECTION I Foundations of Human Movement
FIGURE 1-4 Examples of kinematic movement analysis. Kinematic analy-sis focuses on the amount and type of movement, the direction of themovement, and the speed or change in speed of the body or an object.The golf shot is presented from two of these perspectives: the angularcomponents of the golf swing (top) and the direction and speed of theclub and ball (bottom).
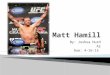
FIGURE 1-5 Examples of kinetic movement analysis. Kinetic analysisfocuses on the cause of movement. The weight lifter demonstrates howlifting can be analyzed by looking at the vertical forces on the groundthat produce the lift (linear) and the torques produced at the three lowerextremity joints that generate the muscular force required for the lift(Redrawn from Lander, J. et al. [1986]. Biomechanics of the squat exer-cise using a modified center of mass bar. Medicine and Science in Sportsand Exercise, 18:469–478).
study that examines the forces acting on a system, such asthe human body, or any object. A kinetic movement analy-sis attempts to define the forces causing a movement. Akinetic movement analysis is more difficult than a kine-matic analysis both to comprehend and to evaluate,

chair and the foot and the ground. In addition, muscularforces are acting throughout the body to counteract gravityand keep the head and trunk erect. Forces are presentwithout motion and are produced continuously to maintainpositions and postures that do not involve movement.Principles of statics are used to evaluate the sitting posture.Statics is a branch of mechanics that examines systems thatare not moving or are moving at a constant speed. Staticsystems are considered to be in equilibrium. Equilibrium isa balanced state in which there is no acceleration becausethe forces causing a person or object to begin moving, tospeed up, or to slow down are neutralized by oppositeforces that cancel them out.
Statics is also useful for determining stresses onanatomical structures in the body, identifying the magni-tude of muscular forces, and identifying the magnitude offorce that would result in the loss of equilibrium. Howmuch force generated by the deltoid muscle is required tohold the arm out to the side? Why is it easier to hold anarm at the side if you lower the arm so that it is no longerperpendicular to the body? What is the effect of anincreased curvature, or swayback, on forces comingthrough the lumbar vertebrae? These are the types ofquestions static analysis may answer. Since the static caseinvolves no change in the kinematics of the system, a staticanalysis is usually performed using kinetic techniques toidentify the forces and the site of the force applicationsresponsible for maintaining a posture, position, or con-stant speed. However, kinematic analyses can be applied instatics to substantiate whether there is equilibriumthrough the absence of acceleration.
To leave the computer workstation and get up out ofthe chair, it is necessary to produce forces in the lowerextremity and on the ground. Dynamics is the branch ofmechanics used to evaluate this type of movement, since itexamines systems that are being accelerated. Dynamicsuses a kinematic or kinetic approach or both to analyzemovement. An analysis of the dynamics of an activity suchas running may incorporate a kinematic analysis in whichthe linear motion of the total body and the angularmotion of the segments are described. The kinematicanalysis may be related to a kinetic analysis that describesforces applied to the ground and across the joints as theperson runs. Since this textbook deals with numerousexamples involving motion of the human or a human-propelled object, dynamics is addressed in detail in specificchapters on linear and angular kinematics and kinetics.
Basic Structural Analysis
Section 1 of this book discusses the basic structures thatmake up the human body. These structures include bone,tendon, ligament, and muscle. Of great interest tobiomechanists are the mechanical properties of these tissues.Generally, when analyzing the mechanical properties of suchstructures, we discern the external forces that are applied to
by a significant amount if the weight of the body lifted andthe speed of the bar were not considered.
The forces produced during human movement are veryimportant, since they are responsible for creating all of ourmovements and for maintaining positions or postures hav-ing no movement. The assessment of these forces representsthe greatest technical challenge in this field, since it requiressophisticated equipment and significant expertise. Thus, forthe novice movement analyst, concepts relating to maximiz-ing or minimizing force production in the body will be moreimportant than evaluating the actual forces themselves.
A kinetic analysis can provide the teacher, therapist, coach,or researcher with valuable information about how themovement is produced or how a position is maintained. Thisinformation can direct conditioning and training for a sportor movement. For example, kinetic analyses performed byresearchers have identified weak and strong positions in var-ious joint movements. Thus, we know that the weakest posi-tion for starting an arm curl is with the weights hangingdown and the forearm straight. If the same exercise is startedwith the elbow slightly bent, more weight can be lifted.
Kinetics also identifies the important parts of a skill interms of movement production. For example, what is thebest technique for maximizing a vertical jump? Aftermeasuring the forces produced against the ground that areused to propel the body upward, researchers have con-cluded that the vertical jump incorporating a very quickdrop downward and stop-and-pop upward action (oftencalled a countermovement action) produces more effec-tive forces at the ground than the slow, deep gather jump.
Last, kinetics has played a crucial role in identifyingaspects of a skill or movement that make the performerprone to injury. Why do 43% of participants and 76% ofinstructors of high-impact aerobics incur an injury (4)?The answer was clearly identified through a kinetic analy-sis that found forces in typical high-impact aerobic exer-cises to be in the magnitude of 4 to 5 times body weight(5). For an individual weighing 667.5 N (newtons) or150 lb, repeated exposure to forces in the range of 2670to 3337.5 N (600–750 lb) partially contributes to injuryof the musculoskeletal system.
Examination of both the kinematic and kinetic compo-nents are essential to full understanding of all aspects of amovement. It is also important to study the kinematic andkinetic relationships, since any acceleration of a limb, of anobject, or of the human body is a result of a force appliedat some point, at a particular time, of a given magnitude,and for a particular duration. While it is of some use merelyto describe the motion characteristics kinematically, onemust also explore the kinetic sources before a thoroughcomprehension of a movement or skill is possible.
STATICS VS DYNAMICS
Examine the posture used to sit at a desk and work at acomputer. Are forces being exerted? Yes, even though thereis no movement, there are forces between the back and the
CHAPTER 1 Basic Terminology 9

stress. Figure 1-8 illustrates the stress–strain relationshipsof bone vertebrae of normal rhesus monkeys versus thosethat have been immobilized. A stress–strain analysis can beperformed with either pulling force (tension), pushingforce (compression) or shear force (a push or pull alongthe surface of the material). This book deals only with ten-sion and compression stress–strain relationships.
In this type of test, stress is defined as the force per unitarea and is designated with the Greek letter sigma (�).Stress is calculated thus:
where F is the applied force and A is the unit area overwhich the force is applied. The force is applied perpendi-cular to the surface of the structure over a predeterminedarea. The unit in which a force is measured is the newton(N). The unit of area is the square meter (m2). Thus, theunit of stress is newtons per square meter (N/m2), or thepascal (Pa).
Deformation or strain is also scaled to the initial lengthof the structure being tested. That is, the deformationcaused by the applied stress is compared to the initial, orresting, length of the material, when no force is applied.Strain, designated by the Greek letter epsilon (�), is there-fore defined as the ratio of the change in length to theresting length. Thus:
� ��LL
� �FA
the structure and relate these to the resulting deformation ofthe structure. The ability of a structure to resist deformationis dependent on its material organization and overall shape.Therefore, this type of analysis is important because it givesus information on the mechanical properties of the structurethat may ultimately influence its function.
STRESS–STRAIN
The force applied to deform a structure and the resultingdeformation are referred to as stress and strain, respectively.To enable comparison of structures of different sizes, stressand strain are scaled quantities of the force applied and thedeformation of the structure, respectively. The values ofstress and strain are measured on a machine that can placeeither tension (pulling stress) or compression (pushingstress) on the structure (Fig. 1-6). In this figure, the loadcell measures the tension, or pulling force, applied to thetendon, and the extensiometer measures the length towhich the tendon is stretched. The actuator is a motor thatinitiates the pull on the tendon. Figure 1-7 shows a similarsetup to determine the compression stress on an ampu-tated foot. The graph relating stress to strain is thestress–strain curve of a structure. A stress–strain analysiscan be used in such ways as to discern how a materialchanges with age, how materials react to different forceapplications, and how a material reacts to lack of everyday
10 SECTION I Foundations of Human Movement
FIGURE 1-6 A testing machine that determines the stress–strain proper-ties of a tendon. The actuator stretches the tendon, which is thenallowed to recoil. (Reprinted with permission from Alexander, R. McN.(1992). The Human Machine. New York: Columbia University Press.)
FIGURE 1-7 A testing machine that determines the stress–strain propertiesof an amputated foot. (Reprinted with permission from Alexander, R. McN.(1992). The Human Machine. New York: Columbia University Press.)
Actuator
Extensiometer
Clamp
Load cell
Tendon
Load cell
Rod in tibia
Steel block
Roller
Actuator

point, the structure is said to be in the elastic region. Ifthe stress is removed while the material is in this region,the material will return to its original length with nostructural damage. After the yield point, the molecularcomponents of the material are permanently displacedwith respect to each other, and if the applied force isremoved, the material will not return to its original length(Fig. 1-10). The difference between the original length ofthe material and the (resting) length resulting from stressinto the plastic region is the residual strain.
The region after the yield point is the plastic region.For rigid materials, such as bone, the yield or plasticregion is relatively small, while for other materials it can berelatively large. If the applied force continues beyond theplastic region, the structure will eventually reach failure,at which point the stress quickly falls to zero. The maxi-mal stress reached when failure occurs determines the fail-ure strength and failure strain of the material.
In normal functional activities, the stress applied willnot cause a strain that reaches the yield point. When struc-tures are designed by an engineer, the engineer considersa safety factor when determining the stress–strain rela-tionship of the structure. This safety factor is generally inthe range of 5 to 10 times the stress that would normallybe placed on the structure. That is, the applied force toreach the yield point is significantly greater than the forcegenerally applied in everyday activities. It is obvious andhas been suggested that biological materials and biologi-cal structures must have a significantly large safety factor.Needless to say, the stresses placed on a biological structurein everyday activities are much less than the structure canhandle. Figure 1-11 illustrates a stress–strain curve for ahuman adult tibia and the actual stress–strain relationshipduring jogging.
When a structure is deformed by an applied force, thestrain developed in the material relates to the mechanical
where �L is the change in length of the structure and L isthe initial length. Because we are dividing a length by alength, there are no units and so strain is a dimensionlessnumber.
A stress–strain curve is presented in Figure 1-9. Anumber of key points on this curve are important to theultimate function of the structure. In this curve, the slopeof the linear portion of the curve is the elastic modulus,or stiffness of the material. Stiffness is thus calculated as:
As greater force is applied to the structure, the slope ofthe curve will eventually decrease. At this point, the struc-ture is said to yield or reach its yield point. Up to the yield
k �StressStrain
��
�
CHAPTER 1 Basic Terminology 11
FIGURE 1-8 Stress–strain curves for bone vertebral segments from a nor-mal and immobilized rhesus monkey (Adapted from Kazarian, L. E., VonGierke, H. E. [1969]. Bone loss as a result of immobilization and chela-tion. Preliminary results in Macaca mulatta. Clinical Orthopaedics,65:67–75.).
FIGURE 1-9 An idealized stress–strain curve showing the elastic and plas-tic regions and the elastic modulus.
FIGURE 1-10 A stress–strain curve of a material that has been elongatedinto the plastic region. A, The period of the applied load. B, The periodwhen the applied load is removed. The residual strain results because ofthe reorganization of the material at the molecular level.
Normal
Immobilized
Strain
Str
ess
Strain
Str
ess
Elastic Plastic
Ε
σf
σy
σ
ε
ε εfy
Yield point
Failure
Plastic flow
Residualstrain
Strain
Str
ess
σf
σ
εy
y
A
B

TYPES OF MATERIALS
ElasticThe idealized material described in Figure 1-9 is an elas-tic material. In this type of material there is a linear rela-tionship between the stress and strain. That is, when thematerial is deformed by the applied force, the amount ofdeformation is the same for a given amount of stress.When the applied load is removed, the material will returnto its resting length as long as the material did not reachits yield point. In an elastic material, the mechanicalenergy that was stored is fully recovered.
ViscoelasticAs opposed to elastic structures, certain materials showstress–strain characteristics that are not strictly linear;these are viscoelastic materials. These structures havenonlinear or viscous properties in combination with linearelastic properties. The combination of these propertiesresults in the magnitude of the stress being dependent onthe rate of loading, or how fast the load is applied. Nearlyall biological materials, such as tendon and ligament, showsome level of viscoelasticity.
Figure 1-13 illustrates a viscoelastic material. On astress– strain curve of a viscoleastic material, the terms stiff-ness, yield point, and failure point also apply. The elasticand plastic regions are defined similarly as in an elastic mate-rial. However, in contrast to an elastic structure, stiffnesshas several values that can be determined by where it wascalculated on the curve. In Figure 1-13, the stiffness desig-nated by E1 is less than that of E2. However, E3 is certainlyless than E2. In addition, in a viscoelastic material, thestored mechanical energy is not completely returned whenthe applied load is removed. Thus, the energy returned isnot equal to the energy stored. The energy that is lost ishysteresis (Fig. 1-14).
Materials, whether they are elastic or viscoelastic, areoften referred to as stiff, compliant, or brittle, depending on
energy absorbed by the material. The amount of mechani-cal energy stored is proportional to the area under thestress–strain curve (Fig. 1-12). That is, the stored mechan-ical energy is:
When the applied force is removed, the stored energyis released. For example, a rubber band can be stretchedby pulling on both ends. When one end is released, therubber band rebounds back to its original length but indoing so releases the energy stored during stretching. Forpractical purposes, this is the same concept as a trampo-line. The weight of the person bouncing on it deforms thebed and stores energy. The trampoline rebounds andreleases the stored energy to the person.
ME �1
2��
12 SECTION I Foundations of Human Movement
FIGURE 1-11 The shaded area represents the tension stress–strain valuesof an adult human tibia during jogging while the solid line representsbone samples tested to failure (Adapted with permission from Nordin,M., Frankel, V. H. [1989]. Basic Biomechanics of the MusculoskeletalSystem. Philadelphia: Lea and Febiger.).
FIGURE 1-12 The stored mechanical energy (shaded area) is equal to thearea under the stress–strain curve.
FIGURE 1-13 A stress–strain curve of a typical viscoelastic material. Theelastic modulus (slope of the curve) varies according to the portion of thecurve on which it is calculated.
Physiologic area
Strain
Str
ess
Strain
Str
ess
Energy = 1/2 σε
Strain
Str
ess
σf
σy
εy εf
Ε1
Ε2
Ε3

them consistently when analyzing movement. The correctinterpretation of flexing the arm is to raise the whole arm,since the arm is the segment between the shoulder and theelbow, not the segment between the elbow and the wristor the hand segment. A review of segment names isworthwhile preparation for more extensive use of them inthe study of biomechanics.
The head, neck, and trunk are segments composingthe main part of the body and the axial portion of theskeleton. This portion of the body is large, accountingfor more than 50% of a person’s weight, and it usuallymoves much more slowly than the other parts of thebody. Because of its large size and slow speed, the trunkis a good segment to observe visually when one is learn-ing to analyze movement or following the total bodyactivity.
The upper and lower extremities are termed theappendicular portion of the skeleton. Generally speak-ing, as one moves away from the trunk, the segmentsbecome smaller, move faster, and are more difficult toobserve because of their size and speed. Thus, arm flex-ion is raising the upper extremity in front, while forearmflexion describes a movement at the elbow. The move-ments of the arm will typically be described as they occurin the shoulder joint; the forearm movements will bedescribed in relation to elbow joint activity; and handmovements will be described relative to wrist jointactivity. Figure 1-16 illustrates the axial and appendicularregions of the body with the correct segment names.
In the lower extremity, the thigh is the region betweenthe hip and knee joints; the leg is the region between theknee and ankle joints; and the foot is the region distal tothe ankle joint. The movement of the thigh will typically
the elastic modulus. Stress–strain curves of these materialsare presented in Figure 1-15. A compliant material will havean elastic modulus less than that of a stiff material. Thecompliant material will store considerably more energy thana stiff material. On the other hand, a brittle material willhave a greater elastic modulus and will store less energythan a stiff material. Nonetheless, all of these terms are rel-ative. Depending on the materials being tested, a brittlematerial may be considered stiff relative to one material andcompliant relative to another. For example, bone is brittlerelative to tendon but compliant relative to glass.
Anatomical Movement Descriptors
SEGMENT NAMES
To flex the arm, does one lift at the elbow with weights inthe hand or raise the whole arm in front? Whatever inter-pretation is placed on the segment name, the term armwill determine the type of movement performed. It isimportant to identify segment names correctly and use
CHAPTER 1 Basic Terminology 13
FIGURE 1-14 A stress–strain curve of a typical viscoelastic material show-ing the energy recovered when the material is allowed to return to itsresting length. The hysteresis or energy lost is equal to the energy storedwhen the material is deformed minus the energy recovered.
FIGURE 1-15 Stress–strain curves of compliant, stiff and brittle materials.The elastic modulus is significantly different in the three materials.
FIGURE 1-16 Anatomical vs fundamental starting position. The anatom-ical and fundamental starting positions serve as a reference point for thedescription of joint movements.
Strain
Str
ess
Hysteresis(energy lost)
Energyrecovered
Strain
Str
ess
BrittleStiff
Compliant

positions appear to be quite obvious, since there is usuallya straight line between the two segments so that no rela-tive angle is formed between them. Zero position in thetrunk occurs when the trunk is vertical and lined up withthe lower extremity. The zero position at the knee is foundin the standing posture when there is no angle betweenthe thigh and the leg. One not so obvious zero position isat the ankle joint. For this joint, the zero position isassumed in stance with the foot at a right angle to the leg.
Movement description or anatomical location can bestbe presented using terminology universally accepted andunderstood. Movement terms should become a part of aworking vocabulary, regardless of the level of applicationof kinesiology required. Development of solid knowledgeof the movement characteristics of the various phases of ahuman movement or sport skill can improve the effective-ness of teaching a skill, assist in correcting flaws in a per-formance, identify important movements and segmentsfor emphasis in conditioning, and identify aspects of theskill that may be associated with injury. The experiencedcoach or teacher can determine the most relevant move-ments in a skill and will use a specific vocabulary of termsto instruct students or athletes. A standardized set ofterms is most helpful in this situation.
The anatomical terms describing the relative positionor direction are illustrated in Figure 1-18. The termmedial refers to a position relatively close to the midlineof the body or object or a movement that moves towardthe midline. In the anatomical position, the little fingerand the big toe are on the medial side of the extremity,since they are on the side of the limb closest to the midlineof the body. Also, pointing the toes toward the midline ofthe body is considered a medial movement. The oppositeof medial is lateral, that is, a position relatively far fromthe midline or a movement away from the midline. Thethumb and the little toe are on the lateral side of the handand foot, respectively, since they are farther from midline.Likewise, pointing the toes out is a lateral movement.Landmarks are also commonly designated as medial or lat-eral based on their relative position to the midline, such asmedial and lateral condyles, epicondyles, and malleoli.
Proximal and distal are used to describe the relativeposition with respect to a designated reference point, withproximal representing a position closer to the referencepoint and distal being a point farther from the reference.The elbow joint is proximal and the wrist joint is distalrelative to the shoulder joint. The ankle joint is proximaland the knee joint is distal relative to the point of heelcontact with the ground. Both proximal and distal mustbe expressed relative to some reference point.
A segment or anatomical landmark may lie on thesuperior aspect of the body, placing it above a particularreference point or closer to the top of the head. It may lieon an inferior aspect, that is, lower than a reference seg-ment or landmark. For example, the head is positionedsuperior to the trunk, the trunk is superior to the thigh,and so on. The greater trochanter is located on the
be described as it occurs at the hip joint; leg movement,described by actions at the knee joint; and the foot move-ments, determined by ankle joint activity.
ANATOMICAL TERMS
The description of a segmental position or joint movementis typically expressed relative to a designated starting posi-tion. This reference position, the anatomical position, hasbeen a standard reference point used for many years byanatomists, biomechanists, and the medical profession. Inthis position, the body is in an erect stance with the headfacing forward, arms at the side of the trunk with palmsfacing forward, and the legs together with the feet point-ing forward. Some biomechanists prefer to use what iscalled the fundamental position as the reference position.This reference position is similar to the anatomical positionexcept that the arms are in a more relaxed posture at thesides with the palms facing in toward the trunk. Whateverstarting position is used, all segmental movement descrip-tions are made relative to some reference position. Both ofthese reference positions are illustrated in Figure 1-16.
To discuss joint position, we must define the jointangle, or more correctly, the relative angle between twosegments. A relative angle is the included angle betweenthe two segments (Fig. 1-17). The calculation of the rela-tive angle will be illustrated in a later section of this book.
The starting position is also called the zero position, ororigin, for description of most joint movements. Forexample, when a person is standing, there is zero move-ment at the hip joint. If the thigh is lifted or rotated in orout, the amount of movement is described relative to thefundamental or anatomical starting position. Most zero
14 SECTION I Foundations of Human Movement
FIGURE 1-17 Relative angles of the elbow (A) and the knee (B).
A
B

straightening movement in which the relative angle of thejoint between two adjacent segments increases as the jointreturns to the zero or reference position. Numerousexamples of both flexion and extension are provided inFigure 1-19. A person can also perform hyperflexion ifthe flexion movement goes beyond the normal range offlexion. For example, this can happen at the shoulder onlywhen the arm moves forward and up in flexion through180° until it is at the side of the head, and then hyper-flexes as it continues to move past the head toward theback. Hyperextension can occur in many joints as theextension movement continues past the original zero posi-tion. It is common to see hyperextension movements inthe trunk, arm, thigh, and hand.
A toe-touch movement entails flexion at the vertebral,shoulder, and hip joints. The return to the standing posi-tion involves the opposite movements: of vertebral exten-sion, hip extension, and shoulder extension. The powerphase of the jump shot is produced via smooth timing oflower extremity hip extension, knee extension, and ankleextension coordinated with shoulder flexion, elbow exten-sion, and wrist flexion in the shooting limb. This exampleillustrates the importance of the lower extremity extensionmovements to the production of power. Lower extremityextension often serves to produce upward propulsionworking against the pull of gravity. It is opposite in theshoulder joint, where flexion movements are primarilyused to develop propulsion upward against gravity to raisethe limb.
The second pair of movements, abduction and adduc-tion, are not as common as flexion and extension,occurring only in the metatarsophalangeal (foot), hip,shoulder, wrist, and metacarpophalangeal (hand) joints.
superior aspect of the femur, and the medial epicondyle ofthe humerus is located on the inferior end of the humerus.
The location of an object or a movement relative to thefront or back is anterior or posterior, respectively. Thus,the quadriceps muscle group is located on the anterioraspect of the thigh, while the hamstrings muscle group islocated on the posterior aspect of the thigh. Anterior isalso synonymous with ventral for a location on the humanbody, while posterior refers to the dorsal surface or posi-tion on the human.
The term ipsilateral describes activity or location of asegment or landmark positioned on the same side as aparticular reference point. Actions, positions, and land-mark locations on the opposite side can be designated ascontralateral. Thus, when a person lifts the right leg for-ward, there is extensive muscular activity in the iliopsoasmuscle of that leg, the ipsilateral leg, and extensive activ-ity in the gluteus medius of the contralateral leg to main-tain balance and support. In walking, as the ipsilaterallower limb is swinging forward, the other limb, the con-tralateral limb, is pushing on the ground to propel thewalker forward.
MOVEMENT DESCRIPTION
Basic MovementsSix basic movements occur in varying combinations in thejoints of the body. The first two movements, flexion andextension, are movements found in almost all of the freelymovable joints in the body, including the toe, ankle, knee,hip, trunk, shoulder, elbow, wrist, and finger. Flexion is abending movement in which the relative angle of the jointbetween two adjacent segments decreases. Extension is a
CHAPTER 1 Basic Terminology 15
FIGURE 1-18 Anatomical terms used todescribe relative position or direction.
Superior
Inferior
AnteriorPosterior
Proximal
Distal
Medial
Lateral
Medial
Lateral

medial or internal rotation refers to the movement of asegment about a vertical axis running through the segmentso that the anterior surface of the segment moves towardthe midline of the body while the posterior surface movesaway from the midline. Lateral or external rotation is theopposite movement in which the anterior surface movesaway from the midline and the posterior surface of the seg-ment moves toward the midline. Since the midline runsthrough the trunk and head segments, the rotations inthese segments are described as left or right from the per-spective of the performer. Right rotation is the movementof the anterior surface of the trunk so that it faces rightwhile the posterior surface faces left, and left rotation is theopposite movement so that the anterior trunk faces left andthe posterior trunk faces right. Rotations occur in the ver-tebrae, shoulder, hip, and knee joints. Rotation move-ments are very important in the power phase of sport skillsinvolving the trunk, arm, or thigh. For throwing, thethrowing arm laterally rotates in the preparatory phase andmedially rotates in the power and follow-through phases.The trunk complements the arm action with right rotationin the preparatory phase (right-handed thrower) and leftrotation in the power and follow-through phase. Likewise,the right thigh laterally rotates in the preparatory phase
Many of these movements are presented in Figure 1-20.Abduction is a movement away from the midline of thebody or the segment. Raising an arm or leg out to the sideor the spreading of the fingers or toes is an example ofabduction. Hyperabduction can occur in the shoulderjoint as the arm moves more than 180° from the side allthe way up past the head. Adduction is the return move-ment of the segment back toward the midline of the bodyor segment; bringing the arms back to the trunk, bringingthe legs together, and closing the toes or fingers areexamples of adduction. Hyperadduction occurs fre-quently in the arm and thigh as the adduction continuespast the zero position so that the limb crosses the body.These side-to-side movements are commonly used tomaintain balance and stability during the performance ofboth upper and lower extremity sport skills. Controllingor preventing abduction and adduction movements of thethigh is especially crucial to the maintenance of pelvic andlimb stability during walking and running.
The last two basic movements are segment rotations,illustrated in Figure 1-21. A rotation can be either medial(also known as internal) or lateral (also known as external).Rotations are designated as right and left for the head andtrunk only. When in the fundamental starting position,
16 SECTION I Foundations of Human Movement
FIGURE 1-19 Flexion and extension. These movements occur in many joints in the body, including vertebra,shoulder, elbow, wrist, metacarpophalanx, interphalanx, hip, knee, and metatarsophalanx.

bottom of the scapula moves away from the trunk and thetop of the scapula moves toward the trunk. This movementis termed upward rotation; the return movement, whenthe scapula swings back down into the resting position, isdownward rotation.
In the arm and the thigh, a combination of flexionand adduction is termed horizontal adduction and acombination of extension and abduction is called hori-zontal abduction. Horizontal adduction, sometimescalled horizontal flexion, is the movement of the arm orthigh across the body, toward the midline, using a move-ment horizontal to the ground. Horizontal abduction,or horizontal extension, is a horizontal movement ofthe arm or thigh away from the midline of the body.These movements are used in a wide variety of sportskills. The arm action of the discus throw is a good exam-ple of the use of horizontal abduction in the preparatoryphase and horizontal adduction in the power and follow-through phase. Many soccer skills use horizontal adduc-tion of the thigh to bring the leg up and across the bodyfor a shot or pass.
In the forearm, pronation and supination occur as thedistal end of the radius rotates over and back on the ulna
and medially rotates until the lower extremity comes offthe ground in the power phase.
Specialized Movement DescriptorsSpecialized movement names are assigned to a varietyof segmental movements (Fig. 1-22). While most of thesesegmental movements are technically among the six basicmovements, the specialized movement name is the termi-nology commonly used by movement professionals. Rightand left lateral flexion applies only to movement of thehead or trunk. When the trunk or head tilts sideways, themovement is termed lateral flexion. If the right side of thetrunk or head moves so that it faces down, the movementis termed right lateral flexion and vice versa.
The shoulder girdle has specialized movement namesthat can best be described by observing the movements ofthe scapula. The raising of the scapula, as in a shouldershrug, is termed elevation, while the opposite loweringmovement is depression. If the two scapulae move apart,as in rounding the shoulders, the movement is termedprotraction. The return movement, in which the scapulaemove toward each other with the shoulders back, is calledretraction. Finally, the scapulae can swing out so that the
CHAPTER 1 Basic Terminology 17
FIGURE 1-20 Abduction and adduction. These movements occur in the sternoclavicular, shoulder, wrist,metacarpophalangeal, hip, intertarsal, and metatarsophalangeal joints.

In the foot, plantarflexion and dorsiflexion are spe-cialized names for foot extension and flexion,respectively. Plantarflexion is the movement in whichthe bottom of the foot moves down and the angleformed between the foot and the leg increases. Thismovement can be created by raising the heel so theweight is shifted up on the toes or by placing the foot flaton the ground in front and moving the leg backward sothat the body weight is behind the foot. Dorsiflexion isthe movement of the foot up toward the leg thatdecreases the relative angle between the leg and the foot.This movement may be created by putting weight on theheels and raising the toes or by keeping the feet flat onthe floor and lowering with weight centered over thefoot. Any foot–leg angle greater than 90° is termed aplantarflexed position, while any foot–leg angle less than90° is termed dorsiflexion.
The foot has another set of specialized movements,called inversion and eversion, that occur in the intertarsaland metatarsal articulations. Inversion of the foot takesplace when the medial border of the foot lifts so that thesole of the foot faces in toward the other foot. Eversionis the opposite movement of the foot: the lateral aspect ofthe foot lifts so that the sole of the foot faces away fromthe other foot.
Often there is confusion over the use of the terms inver-sion and eversion and the popularized use of pronation and
at the radioulnar joints. Supination is the movement ofthe forearm in which the palm rotates to face forwardfrom the fundamental starting position. Pronation is themovement in which the palms face backward. Supinationand pronation joint movements have also been referred toas external and internal rotation, respectively. As the fore-arm moves from a supinated position to a pronated posi-tion, the forearm passes through the semiprone position,in which the palms face the midline of the body with thethumbs forward. The actions of forearm pronation andsupination are used with arm rotation movements toincrease the range of motion, add spin, enhance power,and change direction during the force application phasesin racket sports, volleyball, and throwing.
At the wrist joint, the movement of the hand toward thethumb is called radial flexion, while the opposite move-ment of the hand toward the little finger is called ulnarflexion. These specialized movement names are easier toremember because they do not depend on forearm or armposition, as do the interpretation of abduction and adduc-tion, and they can easily be interpreted if the location ofthe radius (thumb side) and the ulna (little finger side) isknown. Ulnar and radial flexion are important in racketsports for control and stabilization of the racket. Also, involleyball, ulnar flexion is a valuable component of theforearm pass, as it helps to maintain the extended arm posi-tion and increases the contact area of the forearms.
18 SECTION I Foundations of Human Movement
FIGURE 1-21 Rotation. Rotation occurs in the vertebral, shoulder, hip, and knee joints.

Circumduction movements are also possible in the foot,thigh, trunk, head, and hand. The movements of all ofthe major segments are reviewed in Table 1-1.
Reference Systems
RELATIVE VS ABSOLUTE
A reference system is necessary for accurate observationand description of any type of motion. The use of jointmovements relative to the fundamental or anatomicalstarting position is an example of a simple reference sys-tem. This system was previously used in this chapter todescribe movement of the segments. To improve upon theprecision of a movement analysis, a movement can be eval-uated with respect to a different starting point or position.
A reference system is necessary to specify position of thebody, segment, or object so as to describe motion or iden-tify whether any motion has occurred. The reference frameor system is arbitrary and may be within or outside of thebody. The reference frame is placed at a designated spot and
supination as descriptors of foot motion. Inversion andeversion are not the same as pronation and supination; infact, they are only a part of pronation and supination.Pronation of the foot is actually a set of movements con-sisting of dorsiflexion at the ankle joint, eversion in thetarsals, and abduction of the forefoot. Supination is createdthrough ankle plantarflexion, tarsal inversion, and forefootadduction. Pronation and supination are dynamic move-ments of the foot and ankle occurring when the foot is onthe ground during a run or walk. These two movementsare determined by structure and laxity of the foot, bodyweight, playing surfaces, and footwear.
The final specialized movement, circumduction, canbe created in any joint or segment that has the potentialto move in two directions, so that the segment can bemoved in a conic fashion as the end of the segmentmoves in a circular path. An example of circumductionis placing the arm out in front and drawing an imaginaryO in the air. Circumduction is not a simple rotation butfour movements in sequence. The movement of the armin the creation of the imaginary O is actually a combi-nation of flexion, adduction, extension, and abduction.
CHAPTER 1 Basic Terminology 19
FIGURE 1-22 Examples of specialized movements. Some joint move-ments are designated with specialized names, even though theymay technically be one of the six basic movements.

reference frame is one in which the axes intersect in thecenter of the joint and movement of a segment isdescribed with respect to that joint. The axes are generallyoriented horizontally (X-axis) and vertically (Y-axis), andthe segment angle is measured from the right horizontalaxes (Fig. 1-23A). The absolute positioning of anabducted arm perpendicular to the trunk is 0° or 360°when described relative to the axes running through theshoulder joint. A relative reference frame is one in whichthe movement of a segment is described relative to theadjacent segment. This type of reference frame is oftenused to describe a joint angle. The axes in this referenceframe are not horizontal and vertical. Figure 1-23B showsthe Y-axis placed along one segment, the leg, and the X-axis perpendicular to the Y-axis. The knee angle can thenbe determined from the lower portion of the Y-axis to thedotted line describing the thigh segment.
In the previously described example of the arm, withabduction perpendicular to the trunk, the relative
usually consists of imaginary lines called axes that intersectat right angles at a common point termed the origin.The axes are generally given letter representations to differ-entiate the direction in which they are pointing. Any posi-tion can be described by identifying the distance of theobject from each of the three axes. It is important to iden-tify the frame of reference used in the description of motion.
An example of a reference system placed outside thebody is the starting line in a race. The center of ananatomical joint, such as the shoulder, can be used as areference system within the body. The arm can bedescribed as moving through a 90° angle if abducted untilperpendicular to the trunk. However, if the ground is usedas a frame of reference, the same arm abduction move-ment can be described with respect to the ground, such asmovement to a height of 1.6 m from the ground.
When angular motion is described, the joint positions,velocities, and accelerations can be described using eitheran absolute or a relative frame of reference. An absolute
20 SECTION I Foundations of Human Movement
TABLE 1-1 Movement Review
Segment Joint Df Movements
Head Intervertebral 3 Flexion, extension, hyperextension, R/L lateral flexion, R/L rotation, circumduction
Atlantoaxial (3 jts) 1 each R/L rotation
Trunk Intervertebral 3 Flexion, extension, hyperextension, R/L rotation, R/L lateral flexion, circumduction
Arm Shoulder 3 Flexion, extension, hyperextension, abduction, adduction, hyperabduction, hyperadduction, horizontal abduction, horizontaladduction, med/lat rotation, circumduction
Arm/shoulder Sternoclavicular 3 Elevation, depression
Girdle Acromioclavicular 3 Abduction, adduction (protraction, retraction), upward/downward rotation
Forearm Elbow 1 Flexion, extension, hyperextension
Radioulnar 1 Pronation, supination
Hand Wrist 2 Flexion, extension, hyperextension, radial flexion, ulnar flexion, circum-duction
Fingers Metacarpophalangeal 2 Flexion, extension, hyperextension, abduction, adduction, circumduction
Interphalangeal 1 Flexion, extension, hyperextension
Thumb Carpometacarpal 2 Flexion, extension, abduction, adduction, opposition, circumduction
Metacarpophalangeal 1 Flexion, extension
Interphalangeal 1
Thigh Hip 3 Flexion, extension, hyperextension, abduction, adduction, hyperadduction, horizontal adduction, horizontal abduction, med/latrotation, circumduction
Leg Knee 2 Flexion, extension, hyperextension, med/lat rotation
Foot Ankle 1 Plantarflexion, dorsiflexion
Intertarsal 3 Inversion, eversion
Toes Metatarsophalangeal 2 Flexion, extension, abduction, adduction, circumduction
Interphalangeal 1 Flexion, extension
R/L, right–left; med/lat, medial–lateral.

out to the side of the body. The planes and axes of thehuman body for motion description are presented inFigure 1-25.
The sagittal plane bisects the body into right and lefthalves. Movements in the sagittal plane occur about amediolateral axis running side to side through the centerof mass of the body. Sagittal plane movements involvingthe whole body rotating around the center of mass includesomersaults, backward and forward handsprings, and flex-ing to a pike position in a dive. The frontal or coronalplane bisects the body to create front and back halves.The axis about which frontal plane movements occur isthe anteroposterior axis that runs anterior and posteriorfrom the plane. Frontal plane motions of the whole body
positioning of the arm with respect to the trunk is 90°.The reference frame should be clearly identified so thatthe results can be interpreted accordingly, and since refer-ence systems vary among researchers, the reference systemand reference point must be identified before comparingand contrasting results between studies. For example,some researchers label a fully extended forearm as a 180°position, and others label the position 0°. After 30° offlexion at the elbow joint, the final position is 150° or 30°,respectively, for the two systems described above. Therecan be considerable confusion when trying to interpret anarticle using a different reference system from that of theauthors.
PLANES AND AXES
The universally used method of describing human move-ments is based on a system of planes and axes. A plane isa flat two-dimensional surface. Three imaginary planesare positioned through the body at right angles to eachother so they intersect at the center of mass of the body.These are the cardinal planes of the body. Movement issaid to occur in a specific plane if it is actually along theplane or parallel to it. Movement in a plane always occursabout an axis of rotation perpendicular to the plane(Fig. 1-24). Stick a pin through a piece of cardboard andspin the paper around the pin. The movement of thecardboard takes place in the plane and the pin representsthe axis of rotation. The cardboard can spin around thepin while the pin is front-to-back horizontal, vertical, orsideways, for movement of the cardboard in all three ofthe planes. This example can be applied to describeimaginary lines running through the total body center ofmass in the same three pin directions. These planes allowfull description of a motion and contrast of an arm move-ment straight out in front of the body with one straight
CHAPTER 1 Basic Terminology 21
FIGURE 1-23 Absolute vs relative referenceframe. Left, An absolute reference frame meas-ures the segment angle (A) with respect to thedistal joint. Right, A relative reference framemeasures the relative angle (B) formed by the twosegments. It is important to designate the refer-ence frame in movement description.
FIGURE 1-24 The plane and axis. Movement takes place in a plane aboutan axis perpendicular to the plane.
Y
A
X
Y
X
B

22 SECTION I Foundations of Human Movement
about the center of mass are not as common as move-ments in the other planes. The transverse or horizontalplane bisects the body to create upper and lower halves.Movements occurring in this plane are primarily rotationsabout a longitudinal axis. An example of transverse planemovement about the body’s center of mass is spinningvertically around the body while in the air.
Although we have described the sagittal, transverse,and frontal cardinal planes, actually any number of otherplanes can pass through the body. For example, we candefine many sagittal planes that do not pass through thecenter of mass of the body. The only requirement fordefining such a plane is that it is parallel to the cardinalsagittal plane. Likewise we can have multiple transverseor frontal planes. Defining these noncardinal planes isuseful for describing joint or limb movements. The inter-section of the three planes is placed at the joint center sothat joint actions can be described in a sagittal, trans-verse, or frontal plane (Fig. 1-26). Noncardinal planescan also be used in examining movements that take placeabout an external axis.
Most planar or two-dimensional analyses in biomechan-ics are concerned with motion in the sagittal plane through
a joint center. Examples of sagittal plane movements at ajoint can be demonstrated by performing flexion and exten-sion movements, such as raising the arm in front, bendingthe trunk forward and back, lifting and lowering the leg infront, and rising on the toes. Examples of sagittal planemovements of the body about an external support pointinclude rotating the body over the planted foot runningand rotating the body over the hands in a vault. The mostaccurate view of any motion in a plane is obtained from aposition perpendicular to the plane of movement to allowviewing along the axis of rotation. Therefore, sagittal planemovements are best viewed from the side of the body toallow focus on a frontal axis of rotation (Fig. 1-27).
Like sagittal plane movements, frontal plane move-ments can occur about a joint. Characteristic joint move-ments in the frontal plane include thigh abduction andadduction, finger and hand abduction and adduction, lat-eral flexion of the head and trunk, and inversion and ever-sion of the foot. Frontal plane motion about an externalpoint of contact can be seen often in dance and balletespecially, as the dancers move laterally from a pivot point,and in gymnastics with the body rotating sideways overthe hands, such as in the cartwheel. The best position toview frontal plane movements is in front or in back of thebody to focus on the joint or the point about which thewhole body is going to rotate (Fig. 1-28).
Examples of movements in the transverse plane aboutlongitudinal joint axes are rotations at the vertebrae,shoulder, and hip joints. Pronation and supination of theforearm at the radioulnar joints is also a transverse planemovement. The axis for all of these movements is an imag-inary line running vertically through the vertebrae, theshoulder, the radioulnar or the hip joints. This is a verycommon movement in gymnastics, dance, and ice skating.
FIGURE 1-25 Planes and axes on the human body. The three cardinalplanes that originate at the center of gravity are the sagittal plane, whichdivides the body into right and left; the frontal plane, dividing the bodyinto front and back; and the transverse plane, dividing the body into topand bottom. Movement takes place in or parallel to the planes about amediolateral axis (sagittal plane), an anteroposterior axis (frontal plane),or a longitudinal axis (transverse plane).
FIGURE 1-26 Planes and axes for the knee.
Longitudinal axis
Mediolateralaxis
Anteroposterioraxis
Transverseplane
Frontal plane
Sagittalplane

CHAPTER 1 Basic Terminology 23
FIGURE 1-28 Movements in the frontal plane. Segmental movements inthe frontal plane about anteroposterior joint axes are abduction andadduction or some specialized side-to-side movement. Frontal planemovements about the center of gravity or an external point involve side-ways movement of the body, which is more difficult than movement tothe front or back.
plane movements about an external axis running througha pivot point between the foot and the ground. All spin-ning movements that have the whole body turning aboutthe ground or the ice are examples. While transverse planemotions are vital aspects of most successful sport skills,these movements are difficult to follow visually, since thebest viewing position is either above or below the move-ment, perpendicular to the plane of motion. Consequently,rotation motions are evaluated by following the linearmovement of some point on the body if vertical position-ing cannot be achieved. Examples of movements in thetransverse plane are presented in Figure 1-29.
Most human movements take place in multiple planesat the various joints. In running, for example, the lowerextremity appears to move predominantly in the sagittal
There are also numerous examples from dance, skating,and gymnastics in which the athlete performs transverse
FIGURE 1-27 Movements in the sagittal plane. Sagittal plane movementsare typically flexions and extensions or some forward or backward turn-ing exercise. The movements can take place about a joint axis, the cen-ter of gravity, or an external axis.

joints include the atlantoaxial (neck), interphalangeal(hand and foot), radioulnar (elbow), and ankle joints.Three degrees of freedom does not always imply greatmobility, but it does indicate that the joint allows move-ment in all three planes of motion. The shoulder is muchmore mobile than the hip, even though they both aretriaxial joints and are capable of performing the samemovements. The trunk movements, although classified ashaving 3 df, are quite restricted if one evaluates movementat a single vertebral level. For example, the lumbar andcervical areas of the vertebrae allow the trunk to flex andextend, but this plane of movement is limited in the mid-dle thoracic portion of the vertebrae. Likewise, the rota-tion actions of the trunk occur primarily in the thoracicand cervical regions, since the lumbar region has limitedmovement potential in the horizontal plane. It is only thecombination of all of the vertebral segments that allowsthe 3-df motion produced by the spine.
Also, gliding movements occur across the joint sur-faces. Gliding movements may be interpreted as addingmore degrees of freedom to those defined in the litera-ture. For example, the knee joint is considered to have2 df for flexion and extension in the sagittal plane androtation in the transverse plane. However, the knee jointalso demonstrates linear translation and it is well knownthat there is movement in the joint in the frontal plane asthe joint surfaces glide over one another to create side-to-side translation movements. While these movements havebeen measured and are relatively significant, they have notbeen established as an additional degree of freedom forthe joint. The degrees of freedom for most of the joints inthe body are shown in Table 1-1.
plane as the limbs swing forward and back through thegait cycle. Upon closer examination of the limbs andjoints, one will find movements in all of the planes. At thehip joint, for example, the thigh will perform flexion andextension in the sagittal plane, abduction and adduction inthe frontal plane, and internal and external rotation in thetransverse plane. If human movements were confined tosingle-plane motion, we would look like robots as we per-formed our skills or joint motions. Examine the three-dimensional motion for an overhand throw presented inFigure 1-30. Note the positioning for viewing motion ineach of the three planes.
The movement in a plane can also be described as a sin-gle degree of freedom (df ). This terminology is com-monly used to describe the type and amount of motionstructurally allowed by the anatomical joints. A joint with1 df indicates that the joint allows the segment to movethrough one plane of motion. A joint with 1 df is alsotermed uniaxial, since there is one axis perpendicular tothe plane of motion about which movement occurs. A1-df joint, the elbow, allows only flexion and extension inthe sagittal plane.
Conventionally, most joints are considered to have 1, 2,or 3 df offering movement potential that is uniaxial, biax-ial, or triaxial, respectively. The shoulder is an example ofa 3-df, or triaxial, joint because it allows the arm to movein the frontal plane via abduction and adduction, in thesagittal plane via flexion and extension, and in the trans-verse plane via rotation.
Joints with 3 df include the vertebrae, shoulder, andhip; 2-df joints include the knee, metacarpophalangeal(hand), wrist, and thumb carpometacarpal joints; 1-df
24 SECTION I Foundations of Human Movement
FIGURE 1-29 Movements in the transverse plane. Most transverse planemovements are rotations about a longitudinal axis running through ajoint, the center of gravity, or an external contact point.

CHAPTER 1 Basic Terminology 25
FIGURE 1-30 Movements in all three planes. Most human movements employ movement in all three planes.The release phase of the overhand throw illustrates movements in all three planes. The sagittal plane move-ments are viewed from the side; the frontal plane movements, from the rear; and the transverse plane move-ments, from above.
A kinematic chain is derived from combining degrees offreedom at various joints to produce a skill or movement.The chain is the summation of the degrees of freedom inadjacent joints that identifies the total degrees of freedomavailable or necessary for the performance of a movement.For example, kicking a ball might involve an 11-df systemrelative to the trunk. This would include perhaps 3 df atthe hip, 2 df at the knee, 1 df at the ankle, 3 df in thetarsals (foot), and 2 df in the toes.
Summary
Biomechanics, the application of the laws of physics tothe study of motion, is a useful tool for studying humanmovement. Human motion can be qualitatively or quan-titatively assessed biomechanically. A qualitative analysisis a nonnumeric assessment of the movement. A quanti-tative analysis uses kinematic or kinetic applications thatanalyze a skill or movement by identifying its compo-nents or by assessing the forces creating the motion,respectively.
Individual structures of the human body may be ana-lyzed mechanically using a stress–strain curve to helpdetermine its basic properties. Stress–strain curves illustratethe elastic and plastic regions and the elastic modulus ofthe structure. Structures and materials can be differenti-ated as elastic or viscoelastic based on their stress–straincurves. These basic mechanical properties may give insightinto how a movement may take place.
To provide a specific description of a movement, it ishelpful to define movements with respect to a startingpoint or to one of the three planes of motion: sagittal,frontal, or transverse.
Anatomical movement descriptors should be used todescribe segmental movements. This requires acknowl-edgment of the starting position (fundamental or anatom-ical), standardized use of segment names (arm, forearm,hand, thigh, leg, foot), and the correct use of movementdescriptors (flexion, extension, abduction, adduction,rotation).
REVIEW QUESTIONSTrue or False
1. ____ Biomechanics is the application of the laws of physics tohuman motion.
2. ____ A biomechanical analysis can be accomplished only quali-tatively.
3. ____ Kinesiology is essentially the same as biomechanics.
4. ____ The appendicular skeleton includes the head, trunk, andupper extremities.
5. ____ For each rotation, an axis of rotation can be defined.
6. ____ A relative angle measures the position of a segment inspace.
7. ____ When the relative angle between two segments increases,flexion is said to take place.
8. ____ Pronation and supination describe motions of the fore-arm and can be used for motions of the foot.
9. ____ The right leg is ipsilateral to the left leg.
10. ____ When a material reaches its failure point, the appliedforce immediately drops to zero.
11. ____ Hysteresis is the energy stored in a stress–strain test.
12. ____ Both the anatomical and fundamental reference posi-tions are used by biomechanists.

7. Which of the following are examples of a static analysis?a. A weight-lifter holding a barbell over his headb. An isometric exercisec. The path of a spaceship in flight in spaced. All of the above
8. The unit of force is ____.a. Gramb. Centimeterc. Newtond. All of the above
9. A dynamic analysis of human movement could use ____.a. Both a kinematic and kinetic approachb. Neither a kinematic nor a kinetic approachc. A kinematic but not a kinetic approachd. A kinetic but not a kinematic approach
10. The force applied to a structure will cause a ____.a. Strainb. Stressc. Both A and Bd. Neither A nor B
11. To compare the stress–strain properties of two differentmaterials, the applied force must be applied to ____.a. Both materials at the same timeb. The same side of each materialc. The same volumed. The same area
12. When stressed in its elastic region, a material will exhibit ____.a. Structural reorganizationb. Failurec. No effectd. Residual strain
13. A viscoelastic material ____.a. Has elastic and viscous propertiesb. Exhibits non-linear behaviorc. Has multiple stiffnessesd. All of the above
14. The difference between the anatomical and fundamentalpositions is ____.a. The position of the hands relative to the trunkb. The position of the headc. Both A and Bd. There is no difference
15. The elbow joint in relation to to the wrist relative to the trunkis ____.a. Proximalb. Medialc. Inferiord. Anterior
16. The hip joint relative to the head is ____.a. Proximalb. Medialc. Inferiord. Anterior
17. The right knee relative to the left knee is ____.a. Proximalb. Contralateralc. Inferiord. Ipsilateral
13. ____ The foot is distal to the leg relative to the thigh.
14. ____ Lower extremity motion in running can be studied as if itoccurred only in the sagittal plane.
15. ____ A viscoelastic material has no elastic properties at all.
16. ____ The foot is inferior to the thigh relative to the head.
17. ____ A mediolateral axis runs from the medial side of thebody to the distal side.
18. ____ When a material remains in its elastic region during astress–strain test, it exhibits no residual strain.
19. ____ Statics is a branch of mechanics that studies systems thatdo not move.
20. ____ Angular motion occurs about an axis of rotation.
21. ____ A biomechanist must have a sound knowledge of anatomy.
22. ____ The stiffness of a material can be determined bycalculating the slope of the linear portion of the stress–straincurve.
23. ____ A joint that has only 1° of freedom can also be called auniaxial joint.
24. ____ All joints in the human body have at least 3° of freedom.
25. ____ All analyses in biomechanics must be quantitative.
Multiple Choice
1. Which of the following are not essential areas of study for abiomechanist?a. Anatomyb. Physicsc. Philanthropyd. Mathematics
2. Which of the following is not an example of a qualitativeanalysis?a. A coach correcting a free throwb. A force profile of a weight lifterc. A physical therapist watching a patient exercised. All of the above
3. Which of the following are examples of linear motion?a. The arm of a pitcher throwing a ballb. A parachutist in free-fallc. A runner’s leg motion during a 100-m raced. None of the above
4. Which of the following are examples of angular motion?a. The ball after being thrown by the pitcherb. A parachutist in free fallc. A runner’s leg motion during a 100-m raced. None of the above
5. Which of the following could be a kinetics study?a. The position of a runner during each segment of a raceb. The velocity of a runner during portion of a racec. The angular motion of a runner’s leg during a raced. None of the above
6. An example of a kinematic study is ____.a. The force acting on a runner during a raceb. The velocity of a runner during portion of a racec. The force applied to a ball being kickedd. None of the above
26 SECTION I Foundations of Human Movement

25. A uniaxial joint has how many degrees of freedom?a. 3b. 1c. 2d. Multiple
REFERENCES
1. Richie, D. H., et al. (1985). Aerobic dance injuries: A retro-spective study of instructors and participants. Physician andSports Medicine, 13:130–140.
2. Ulibarri, V. D., et al. (1987). Ground reaction forces in selectedaerobics movements. Biomechanics in Sport. New York:Bioengineering Division of the American Society of MechanicalEngineering, 19–21.
3. Lander, J., et al. (1986). Biomechanics of the squat exerciseusing a modified center of mass bar. Medicine and Science inSports and Exercise, 18:469–478.
4. Kazarian, L. E., Von Gierke, H. E. (1969). Bone loss as a resultof immobilization and chelation. Preliminary results in Macacamulatta. Clinical Orthopaedics, 65:67–75.
5. Nordin, M., Frankel, V. H. (1989). Basic Biomechanics of theMusculoskeletal System. Philadelphia: Lea and Febiger.
ADDITIONAL READING
Alexander, R. McN. (1992). The Human Machine. New York:Columbia University Press.
Marieb, E. N., Mallatt, J. (2001). Human Anatomy (3rd ed.). SanFrancisco: Benjamin Cummings.
Roozbazar, A. (1974). Biomechanics of lifting. In R.C. Nelson andC.A. Morehouse (Eds.), Biomechanics IV. Baltimore: UniversityPark Press, 37–43.
Vetter, W. L., et al. (1985). Aerobic dance injuries. Physician andSports Medicine, 13:114–120.
18. A joint in which the relative angle continues past its zeroposition undergoes ____.a. Hyperextensionb. Hyperflexionc. Hyperadductiond. Hyperabduction
19. Which of the following are not movements of the scapula?a. Depressionb. Lateral flexionc. Upward rotationd. Retraction
20. Radial flexion takes place on ____.a. The thumb side of the handb. The little finger side of the handc. The big toe side of the footd. The little toe side of the foot
21. A reference system has ____.a. Planesb. Axesc. An origind. All of the above
22. Motion in the coronal plane take place about which axis?a. Longitudinalb. Mediolateralc. Transversed. Anteroposterior
23. Most human movements take place in ____.a. The sagittal planeb. The frontal planec. The transverse planed. Multiple planes
24. A degree of freedom is ____.a. The type of movement structurally allowed by a jointb. The number of movements possible at a jointc. Both A and Bd. Neither A nor B
CHAPTER 1 Basic Terminology 27

Failure Point: The point on a stress–strain curve when theapplied force causes a complete rupture of the material.
Flexion: The action in which the relative angle between twoadjacent segments becomes smaller.
Frontal (Coronal) Plane: The plane that bisects the body intofront and back halves.
Fundamental Position: A standardized reference positionsimilar to the anatomical position.
Functional Anatomy: The study of the body componentsneeded to achieve a human movement or function.
Horizontal Abduction: A combination of extension andabduction of the arm or thigh.
Horizontal Adduction: A combination of flexion and adduc-tion of the arm or thigh.
Hysteresis: The mechanical energy lost by a material that hasbeen deformed.
Inferior: A position below a designated reference point.Inversion: The movement in which the medial border of the
foot lifts so that the sole of the foot faces away from themidline of the body.
Ipsilateral: On the same side.
Kinematics: Area of study that examines the spatial andtemporal components of motion (position, velocity,acceleration).
Kinesiology: Study of human movement.Kinetics: Study of the forces that act on a system.
Lateral: A position relatively far from the midline of thebody.
Lateral Flexion: A flexion movement of the head or trunk.Linear Motion: Motion in a straight or curved line in which dif-
ferent regions of the same object move the same distance.Longitudinal Axis: The axis through the center of mass of
the body running from top to bottom.
Medial: A position relatively closer to the midline of thebody.
Mediolateral Axis: The axis through the center of mass ofthe body running from right to left.
Movement: A change in place, position, or posture occurringover time and relative to some point in the environment.
Origin: The intersection of the axes of a reference systemand the reference point from which measures are taken.
Plane of Motion: A two-dimensional flat surface runningthrough an object. Motion occurs in the plane or parallelto the plane.
Plantarflexion: The motion in which the relative anglebetween the foot and the leg increases.
Plastic Region: The region between the yield point and thefailure point on a stress–strain curve. The region in
Abduction: A movement away from the midline of the body.Absolute Reference Frame: A reference frame in which the
origin is at the joint center.Adduction: A movement toward the midline of the body.Anatomy: The science of the structure of the body.Anatomical Position: The standardized reference position
used in the medical profession.Angular Motion: Motion around an axis of rotation in
which different regions of the same object do not movethrough the same distance.
Anterior: A position in front of a designated referencepoint.
Anteroposterior Axis: The axis through the center of massof the body running from posterior to anterior.
Appendicular Skeleton: The bones of the extremities.Axes: The imaginary lines of a reference system along which
position is measured.Axial Skeleton: The bones of the head, neck, and trunk.Axis of Rotation: The imaginary line about which an object
rotates.
Biomechanics: The study of motion and the effect of forceson biological systems.
Cardinal Planes: The planes of the body that intersect at thetotal body center of mass.
Circumduction: A movement that is a combination of flex-ion, adduction, extension, and abduction.
Contralateral: On the opposite side.
Degree of Freedom: The movement of a joint in a plane.Depression: The lowering movement of the scapula.Distal: A position relatively far from a designated reference
point.Dorsal: See Posterior.Dorsiflexion: The motion in which the relative angle
between the foot and the leg decreases.Downward Rotation: The action whereby the scapula swings
toward the midline of the body.Dynamics: The branch of mechanics in which the system
being studied undergoes an acceleration.
Elastic Material: A material that exhibits only elastic proper-ties on a stress–strain curve.
Elastic Modulus: The linear portion of a stress–strain curve.Elastic Region: The area of a stress–strain curve before the
yield point. The area in which the material will return toits resting length when the applied force is removed.
Elevation: The raising of the scapula.Eversion: The movement in which the lateral border of the
foot lifts so that the sole of the foot faces away from themidline of the body.
Extension: The action in which the relative angle betweentwo adjacent segments gets larger.
28 SECTION I Foundations of Human Movement
GLOSSARY

CHAPTER 1 Basic Terminology 29
which the material will not return to its initial lengthafter it is deformed.
Posterior: A position behind a designated reference point.Pronation: Movement in which the forearm rotates to a
palms down position relative to anatomical position.Protraction: The motion describing the separating action of
the scapula.Proximal: A position relatively closer to a designated refer-
ence point.
Qualitative Analysis: A nonnumeric description or evalua-tion of movement based on direct observation.
Quantitative Analysis: A numeric description or evaluationof movement based on data collected during the per-formance of the movement.
Radial Flexion: The flexion movement of the hand towardthe forearm on the thumb side of the hand.
Reference System: A system to locate a point in space.Relative Angle: The included angle between two adjacent
segments.Relative Reference Frame: A reference frame in which the
origin is at the joint center and one of the axes is placedalong one of the segments.
Retraction: The motion describing the coming togetheraction of the scapula.
Residual Strain: The difference between the initial length ofa material and the length when the material has gonebeyond its yield point.
Rotation: A movement about an axis of rotation in whichnot every point of the segment or body covers the samedistance in the same time.
Safety Factor: The ratio of the stress to reach the yield pointto the stress of everyday activity.
Sagittal Plane: The plane that bisects the body into rightand left sides.
Statics: A branch of mechanics in which the system beingstudied undergoes no acceleration.
Stress: Force per unit area.Stress–strain Curve: A plot of the stress placed on a material
against the strain imposed by the stress.
Transverse (Horizontal) Plane: The plane that bisects thebody into top and bottom halves.
Superior: A position above a designated reference point.Supination: The movement in the forearm in which the
forearm rotates to a palms-up position relative toanatomical position.
Ulnar Flexion: The flexion movement of the hand towardthe forearm on the little finger side of the hand.
Upward Rotation: The action whereby the scapula swingsout from the midline of the body.
Ventral: See Anterior.Viscoelastic Material: A material that exhibits nonlinear
properties on a stress–strain curve.
Yield Point: The point on a stress–strain curve at which thematerial reaches the plastic region.