Embed Size (px)
Citation preview

1 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Automotive Electronics
CAN FD CAN with Flexible Data-rate
Automotive Electronics Robert Bosch GmbH, Reutlingen
FD
1

AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
FlexRay
Implementation costs per node
Dat
a-ra
te [
bit/s
]
100k
100M
10M
1M
10k
CAN CAN FD
BroadR Reach
Broadcom
DSI PSI
LIN
MOST 150
Sensors & Embedded Control MM / Driver Assistance
2

AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Motivation Increasing demand for bandwidth in automotive communication
Close gap between CAN (max. 1 MBit/s) and FlexRay (10 MBit/s)
Time-triggered communication not flexible enough
High effort for migration to FlexRay / Ethernet Hardware costs Software changes
Make CAN faster !
3

4 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Speeding up CAN Unchanged CAN arbitration CAN acknowledge mechanism
New switch to higher bit rate for transmission of
Data Length Code Data Field Frame CRC
data fields with more than eight bytes possible configured by unused DLC codes “1001” to “1111” 12, 16, 20, 24, 32, 48, 64 bytes
new CRC polynomials for longer data fields, HD=6 17 bit: up to 16 byte data fields, 21 bit: up to 64 byte data fields
4

5 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Speeding up CAN
Based on existing CAN
well known technology, minimized risk
changes limited to HW: protocol controller
for bit rates up 1 Mbit/s standard CAN transceivers usable
no changes to SW: with 8 bytes data field (legacy SW fully compatible)
even higher data rate possible by data fields >8 bytes and SW change
Costs similar to CAN
Data Phase shortened by switch to higher bit rate
Arbitration Phase
Arbitration Phase
CAN Frame
Arbitration Phase
Arbitration Phase
CAN FD Frame Example
Identifier 11 bit Data Field 32 byte Arbitration Phase 1 Mbit/s Data Phase 4 Mbit/s
average bit rate 3.1 Mbit/s
5

AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
6
Average CAN FD Bit Rate
0
1
2
3
4
5
6
0 1 2 3 4 5 6 7 8 9
Ave
rage
Bit
Rat
e (M
bit/
s)
Bit Rate Data Phase (Mbit/s)
Frame ID: 11 bit, Bit Rate Arbitration: 1Mbit
64 bytes payload 48 bytes payload 32 bytes payload 16 bytes payload 8 bytes payload

AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
7
Net CAN FD Bit Rate
0
1
2
3
4
5
6
0 1 2 3 4 5 6 7 8 9
Net
Bit
Rat
e (M
bit/
s)
Bit Rate Data Phase (Mbit/s)
Frame ID: 11 bit, Bit Rate Arbitration: 1Mbit
64 bytes payload 48 bytes payload 32 bytes payload 16 bytes payload 8 bytes payload
8 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
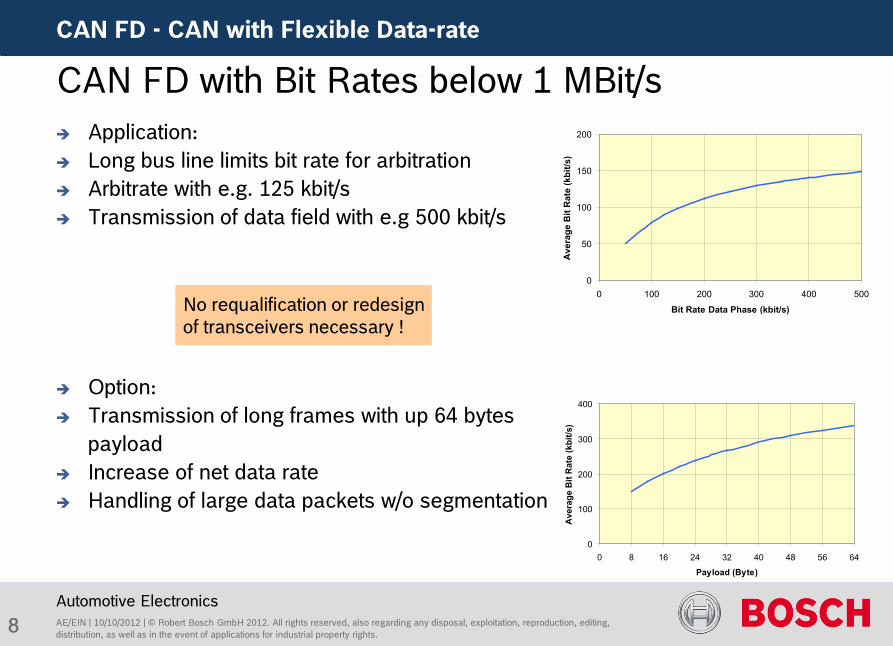
CAN FD with Bit Rates below 1 MBit/s Application: Long bus line limits bit rate for arbitration Arbitrate with e.g. 125 kbit/s Transmission of data field with e.g 500 kbit/s
Option: Transmission of long frames with up 64 bytes
payload Increase of net data rate Handling of large data packets w/o segmentation
0
50
100
150
200
0 100 200 300 400 500
Bit Rate Data Phase (kbit/s)
Ave
rage
Bit
Rat
e (k
bit/s
)
No requalification or redesign of transceivers necessary !
0
100
200
300
400
0 8 16 24 32 40 48 56 64
Payload (Byte)A
vera
ge B
it R
ate
(kbi
t/s)
8

Synchronous Switching of Bit Rate
AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
CAN_1
CAN_0
1650 us 1660 us
CAN_1
f_rx
can_rx
can_tx
sample_point
CAN_0
sample_point
can_rx
can_tx
f_tx
1651550 ns1651900 ns
1653900 ns1654333 ns
1654917 ns1655350 ns
350 ns2000 ns
433 ns584 ns
433 ns
1 65432
SRR IDE EDL r0 BRSId18 ACKCRC DlmStuffId19
r1 IDE EDL r0 BRSId0 ACKCRC DlmStuffId1
Example: CAN_0 wins arbitration at reserved/SRR bit Phase-shift before synchronization: ①② – 350 ns Phase-shift after synchronization: ③④ + 433 ns Phase-shift at beginning of Data Phase: ⑤⑥ + 433 ns
9

10 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
CAN FD Standard Frame
CAN FD Arbitration Phase length: 30 bit times* data rate: max. 1 MBit/s
CAN FD Data Phase length: 86 bit times* (8 data bytes) data rate: > 1 MBit/s
Remote Frames always in CAN Format RTR bit replaced by reserved bit r1 r1 takes part in CAN arbitration reserved for protocol expansion
* bit stuffing not considered
EDL – Extended Data Length Substitutes first reserved bit in standard frames EDL = recessive indicates CAN FD frame format (new DLC-coding and CRC) EDL = dominant indicates standard CAN frame format
r1, r0 – reserved bits Transmitted dominant, reserved for future protocol variants
BRS – Bit Rate Switch BRS = recessive: switch to alternate bit rate BRS = dominant: do not switch bit rate
ESI – Error State Indicator ESI = recessive: transmitting node is error passive ESI = dominant: transmitting node is error active
* 17 bit CRC for data fields with up to 16 bytes
CAN FD Arbitration
CAN FD Data
CAN FD Arbitration
S O F
4 bit DLC
0-64 bytes 21* bit CRC
11 bit Identifier 1 I D E
1 1 7 3
Arbitration Field Control Field Data Field CRC Field ACK EOF Int. Bus Idle
B R S
E S I
E D L
r 0
r 1
10

11 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
CAN FD Extended Frame
EDL – Extended Data Length Substitutes first reserved bit in standard frames EDL = recessive indicates CAN FD frame format (new DLC-coding and CRC) EDL = dominant indicates standard CAN frame format
r1, r0 – reserved bits Transmitted dominant, reserved for future protocol variants
BRS – Bit Rate Switch BRS = recessive: switch to alternate bit rate BRS = dominant: do not switch bit rate
ESI – Error State Indicator ESI = recessive: transmitting node is error passive ESI = dominant: transmitting node is error active
CAN FD Arbitration Phase length: 49 bit times* data rate: max. 1 MBit/s
CAN FD Data Phase length: 86 bit times* (8 data bytes) data rate: > 1 MBit/s
Remote Frames always in CAN Format RTR bit replaced by reserved bit r1 r1 takes part in CAN arbitration reserved for protocol expansion
* bit stuffing not considered
* 17 bit CRC for data fields with up to 16 bytes
CAN FD Data
CAN FD Arbitration
CAN FD Arbitration
S O F
4 bit DLC
0-64 bytes 21* bit CRC
11 bit Identifier S R R
1 I D E
1 1 7 3
Arbitration Field Control Field Data Field CRC Field ACK EOF Int.
18 bit Identifier Extension
E S I
E D L
r 0
B R S
r 1
Bus Idle
11

Structure of CAN FD Nodes
AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Status
BitTimingLogic
Sam
ple Point
Sam
pled Bit
Data P
hase
Tx Bit
Sync M
ode
ScaledClock (tq)
Physical Layer
Protocol Controller
Transceiver
BitStreamProcessor
Bit Tim
e Configuration (A
rbitration Phase &
Data P
hase)
System ClockCA
N_R
x
CA
N_Tx
Tx-Rx-Loop-Delay
Shift
Load
Control
BaudRatePrescaler
CAN_HCAN_L
Rx D
ata
Tx Data
CAN Message
CAN Bus
Shift Register
Physical Layer unchanged for CAN FD same CAN transceivers
CAN FD Protocol Controller two sets of timing configuration
BTL and BRP control bit timing BTL and BRP switch between two sets
BSP controls frame (de)coding BSP defines Arbitration and Data Phase
CAN Message Handling shift register as (de)serializer BSP does not limit data field length
12

CAN FD Bit Rate Switching
AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
1 Time Quantum (tq)
Arbitration Bit Time
Sample Point
1 Time Quantum (tq)
DataBit Time
Sample Point
DataBit Time
DataCAN Time
DataBit Time
Sample Point Sample Point Sample Point
Sync_Seg Prop_Seg Phase_Seg1 Phase_Seg2
1 Time Quantum (tq)
BRS Bit
Sample Point
1 Time Quantum (tq)
CRC Delimiter
Sample Point
Sync_Seg Prop_Seg Phase_Seg1 Phase_Seg2
13
Example: (Bit rate in Data Phase) = 4 · (Bit rate in Arbitration Phase) Different length of time quanta, no Prop_Seg in Data Phase BRS bit with timing of Arbitration Phase until Sample Point CRC Delimiter with timing of Data Phase until Sample Point

14 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
CAN FD Demonstrator
CAN FD Communication
Arbitration Phase 1 Mbit/s Data Phase 12 Mbit/s Data Field 64 Byte
CAN_L– CAN_H
Arbitration PhaseData Phase
AckData Phase
Ack arbitrating
CAN FD Network
Bus Line 42 m CAN FD nodes 7 CAN Transceiver NXP TJA 1040
14

Transceiver Delay and Bus Line Delay
AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
DLC_3..0
Delay Tx->Rx
DataBRS ESI
BRS ESI
BRS ESI
BRS ESI
BRS ESI DLC_3..0 Data
Bus Line Delay
CAN_L – CAN_H
CAN FD Communication
Arbitration Phase 1 Mbit/s Data Phase 15 Mbit/s Bus Line 42 m
Delays in the CAN FD Network
measured at edge from BRS to ESI Transceiver Loop Delay 126 ns Bus Line Delay 163 ns
15
16 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
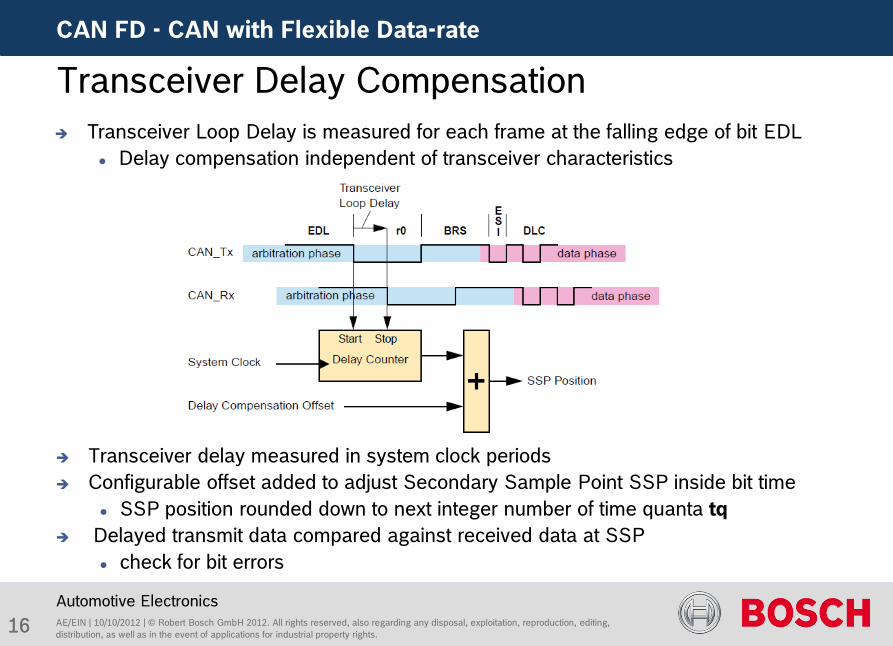
Transceiver Delay Compensation
Transceiver delay measured in system clock periods Configurable offset added to adjust Secondary Sample Point SSP inside bit time
SSP position rounded down to next integer number of time quanta tq Delayed transmit data compared against received data at SSP
check for bit errors
Transceiver Loop Delay is measured for each frame at the falling edge of bit EDL Delay compensation independent of transceiver characteristics
16

AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
17
Oscillator Tolerance – Rules Rules Arbitration Phase
Rule 1 Resynchronization
Rule 2 Sampling of Bit after Error Flag
Rules Data Phase (when Bit Rate is switched)
Rule 3 Resynchronization
Rule 4 Sampling of Bit after Error Flag
Rule 5 Bit Rate Switch
A
A
btsjwdf102 ⋅
<
( )[ ]AA
AA
pbbtpbpbdf
21322,1min
−⋅<
D
D
btsjwdf102 ⋅
<
( )
( )
+⋅−⋅
<
AA
DDD
AA
btBRPBRPpbbt
pbpbdf7262
2,1min
( )
++−⋅
−−
<
DDD
AAA
D
AD
btpbBRPBRPpbbt
BRPBRPsjw
df42222
1
17

18 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Lab Validation – Exemplary Results
Network Topology Termin. Resist.
Bus Length
Max. Bit Rate*
Bus Signal (CANL–CANH)
ISO Bus Topology
2x120Ω 42m 15,0 Mbit/s
Passive Star
1x 60Ω 16m 3,5 Mbit/s
Passive Star
2x120Ω 16m 7,5 Mbit/s
Term. resistor CAN FD node *CAN Transceiver: NXP TJA 1040
18

19 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Conclusion Gradual introduction of CAN FD nodes into CAN networks possible
Bosch CAN IPs currently upgraded to CAN FD (M_CAN, C_CAN) will be integrated into µCs, first samples E2012 upgrade of Bosch VHDL Reference CAN Model to CAN FD integration on µCs of other major manufacturers planned
Tool support for CAN FD started Vector and ETAS integrate CAN FD into their tool chain
Development of vehicle demonstrator with CAN FD network Joint project with automotive and semiconductor companies started
Check EMC issues Emission, Susceptibility / Immunity
Impact on different network topologies under investigation line, star, position of termination, different transceivers
Standardization as ISO 11898-7
Assure support in Higher Layer Protocols (e.g. AUTOSAR, CANopen)
19

20 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Backup
20

23 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Physical Layer
CAN Physical Layer Transceiver loop delay CAN_Tx CAN_Rx: up to 240ns delay on CAN bus line: ~5ns/m
CAN FD Arbitration Phase: arbitrate with remote nodes Limitation: delay[AB] + delay[BA] <TSEG1*
CAN FD Data Phase: transceiver delay compensation for bit monitoring Limitation: filter characteristics of input comparator and bus topology independent of length of CAN bus line
*TSEG1 = Time Segment before Sample Point
CAN_H
CAN_L CAN_Rx
CAN_Tx
transceiver loop delay
CAN_H
CAN_L CAN_Tx
CAN_Rx
transceiver loop delay
delay CAN bus line
delay[A->B]
delay[B->A]
Node A Node B
23

24 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Remote Frames and CAN FD There are no remote frames in CAN FD format
RTR bit is replaced by dominant reserved bit r1 The reserved bit r1 takes part in CAN bit arbitration Bit r1 reserved for future protocol expansions,
e.g. using r1 as additional identifier bit Receivers ignore the actual value of bits r1, r0 in CAN FD frames
CAN FD controllers are able to handle remote frames in standard CAN format
24

26 AE/EIN | 10/10/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
CAN FD - CAN with Flexible Data-rate
Automotive Electronics
Lab Validation – Setup
USB
CAN Case XL FPGA-Board
1 2 3 4 5
Vector CANoe
Oscilloscope
short cables
FPGA-Board 2
6 7 8 9 10
USB
CAN Case XL
FPGA-Board 1
1 2 3 4 5
Vector CANoe
Oscilloscope
Bus Topology
CAN Transceiver i CAN cable 120 Ohm Sub-D Connector
Net
wor
k S
etup
B
oard
Set
up
Monitoring (CANoe)
26








![Physical layer really matters in CAN - can-newsletter.org · CAN Newsletter 1/2016 11 20 mm [7] [8]. Problems do not exist, because CAN Newsletter Online the entire network length](https://img.pdfslide.us/doc/110x75/5f5f69d4a11d9d206575b022/physical-layer-really-matters-in-can-can-can-newsletter-12016-11-20-mm-7-8.jpg)








![ElasticSwitch: Practical Work-Conserving Bandwidth ...people.csail.mit.edu/alizadeh/courses/6.888/papers/...Bandwidth guarantees can be achieved through static reserva-tions [4,11,21]](https://img.pdfslide.us/doc/110x75/5f1e4fa7df63a051d67b9ce6/elasticswitch-practical-work-conserving-bandwidth-bandwidth-guarantees.jpg)











