Embed Size (px)
Citation preview

California PATHPartners for Advanced Trans i t and Highways
Annua l Report 1999

California PATH – Partners for AdvancedTransit and Highways – is a collaborationbetween the California Department ofTransportation (Caltrans), the Universityof California, other public and private aca-demic institutions, and private industry.PATH’s mission: applying advanced tech-nology to increase highway capacity andsafety, and to reduce traffic congestion,air pollution, and energy consumption.

3
California PATHDirector’s Introduction3
A Word from Caltrans5
Overview of California PATH7
ATMIS Research13
AVCSS/AHS Research16
Information and Media21
Recent PATH Publications23
Publications Order Form29
California PATH Database31
Partners for Advanced Trans i t and Highways
Annua l Report 1999

4

5
Director’s Introduction
The California PATH Program, a collaboration between Caltransand the University of California is a unique multidisciplinary re-search program that seeks advanced technological solutions toour worsening transportation problems. PATH’s researchers andstaff come from many countries and academic backgrounds and
are spread across California’s college campuses and into private industry. They areunited by the goal of fulfilling the promise of ITS, Intelligent Transportation Systems,and finding solutions for today and tomorrow.
Caltrans and PATH share a vision of congestion relief through highway automation.PATH’s demonstration of an eight-car fully automated platoon, as well as the Honda/PATH magnetic/computer-vision guided vehicles, were highlights of the most suc-cessful demonstration of vehicle automation technology ever held: Demo ’97. PATHhas since participated in follow-up automation technology demonstrations, includ-ing Demo ’98 in the Netherlands and Demo ’99 in Ohio. Caltrans and PATH arecurrently planning for a major demonstration in 2002 that will showcase automa-tion technology for heavy trucks and buses.
PATH’s research activities in the area of Advanced Traffic Management and Informa-tion Systems (ATMIS) have greatly expanded in the last few years. An exciting newCenter for Commercialization of ITS Technologies (CCIT) will open in August 2000near the Berkeley campus. CATIS will team up University faculty and graduate stu-dents, private sector companies, and government transportation agencies in a newfacility with the mission of facilitating the commercial deployment of advanced traf-fic information system technologies.
PATH brings together engineers and economists, geographers and urban planners,computer scientists and statisticians, among others. Its multidisciplinary atmosphereis responsible for shaping the “modern” transportation engineer, who is familiar notonly with traditional disciplines but also with the emerging areas of sensors, com-munications, data structures, vehicle dynamics and control, and many other disci-plines. We pride ourselves on the many students and post-docs who have “gradu-ated” from PATH and gone on to influential positions at universities and in the pub-lic and private sectors, spreading the ITS vision.
PATH’s future looks bright as the need for intelligent transportation solutions be-comes ever more clearly apparent. Bringing together the best minds in California toimprove California’s, the nation’s and the world’s transportation systems is PATH’sgoal!
Professor Karl HedrickDirector

6

7
Intelligent Transportation Systems are developing at a phenom-enal rate on a global basis. Here in California, Caltrans and PATHare committed to employing all possible developments to im-prove the safety and efficiency of our surface transportation sys-tem. We have taken the national lead in performing research to
discover methods for improving traveler safety, reducing traffic congestion, enhanc-ing the mobility of people and goods, and promoting the transportation system’seconomic productivity. Our goal for the immediate future is to emphasize real-worldimplementations, a natural progression as we advance beyond the stage of theoreti-cal studies and design towards deployment.
We are very happy this year to begin a collaborate research initiative with CaltransTraffic Operations. The mission: optimizing freeway operations, measuring the ben-efits, and transfering results to the implementers. We have established two testbeds,one in Orange County and the other in the San Francisco Bay Area, that will enableus to do practical research in a real-world environment. We are also opening a cen-ter at Berkeley for joint academic and private-sector research on information tech-nology in the transportation field. This Center for Commercialization of ITS Tech-nologies (CCIT) will provide the facilities necessary to further the development andcommercialization of transportation products.
Caltrans and PATH look forward to demonstrating fully automated heavy vehicleson I-15 in Southern California in the fall of 2002. Strategic planning for this demon-stration is now underway, including tactical elements such as budgeting and sched-uling. The heavy-vehicle demo will be a giant step forward in our goal to movecloser to widespread deployment of Automated Highway Systems that support allvehicle types.
Caltrans and the California PATH Program will address each new challenge of thecoming year with enthusiasm, strength, and determination. We will continue towork together to create a transportation system that is both safe and efficient.
Greg LarsonCaltrans Management Liaison
A Word from Caltrans

8

9
The California Partners for Advanced Transit and Highways Program (PATH) has beenleading the way in ITS (Intelligent Transportation Systems) research since PATH’sfounding in 1986, before the term ITS or its predecessor IVHS (Intelligent VehicleHighway Systems) had even been coined.
PATH’s purpose is to develop foundations for the widespread adoption of advancedtechnologies to improve the operation of California’s surface transportation systems.PATH’S specific goals are to increase highway capacity and safety, and to reducetraffic congestion, air pollution, and energy consumption.
Caltrans provides the seed funding for PATH’s core research, based on its goal ofpromoting the development of new knowledge and new technology that can im-prove the productivity, safety, and environmental impacts of California’s surface trans-portation systems.
PATH’s charter includes the missions of conducting leading-edge research, evaluat-ing operational tests, developing public/private/academic partnerships, and edu-cating students as well as practitioners about ITS.
PATH focuses on research with the potential for dramatic improvements in the op-erations of California’s transportation system, rather than diffusing its efforts in areaswhere only incremental improvements are possible. California’s population and itstransportation demands are growing so rapidly that the effects of incremental solu-tions would likely be absorbed by the time they could be implemented. Hence,PATH emphasizes relatively long-term, high-impact solutions. But PATH also addressesthe progressive steps needed to achieve those long-term solutions. PATH researchalso attempts to identify impediments to progress, both technical and institutional,and to devise strategies for overcoming those impediments.Research and development done under PATH auspices includes:
• identification of problems and needs• basic research on enabling technologies• applied technology R & D• system-level design and evaluation• experimental verification of design predictions• evaluations of existing technologies or equipment• evaluations of costs and benefits• technology assessments• predictions of users’ behavioral responses• predictions of the impacts of technologies’ use• evaluations of legal and institutional issues.
Overview of California PATH

10
PATH is managed by the Institute of Transportation Studies of the University of Cali-fornia at Berkeley, which established the PATH Program Headquarters Office at theUniversity’s Richmond Field Station in 1986. Policy issues are addressed by ITS’sPATH Executive Committee, and by the Caltrans-PATH Joint Management Team,composed of program managers from both Caltrans and the University. PATH’s day-to-day operations are managed by the headquarters staff.
PATH headquarters has about 35 full-time staff members, including a core group ofresearch staff members, plus program managers and administrators. A substantialbody of research is done by the full-time research staff at PATH headquarters, butmost PATH research work is done by faculty members employing graduate studentson the campuses of the universities that form the PATH partnership. This work issupplemented by subcontracts to private companies as needed, and by cooperativeresearch agreements with a variety of organizations, including private companies aswell as public institutions, both domestic and international. The product-develop-ment-oriented work of private companies complements the basic work of the aca-demic researchers, so that each group can concentrate on what suits it best. Publi-cation of PATH research work is coordinated at PATH headquarters.
PATH Activities in National and International ITS ProgramsPATH has received substantial funding from the Federal Department of Transporta-tion (DOT), including support from the Federal Highway Administration (FHWA),Federal Transit Administration (FTA), and National Highway Traffic Safety Adminis-tration (NHTSA) on a variety of projects that predated current Federal ITS programs.PATH participation in DOT ITS programs during the past year includes several projectswithin the Intelligent Vehicle Initiative (IVI) program and evaluations of CaliforniaITS operational tests.
Evaluations of California ITS Operational Tests
PATH currently serves as evaluator for the following Field Operational Tests:• TravInfo (Bay Area)• Smart Call Box (San Diego)• Adaptive Traffic Control (Anaheim)• Integrated Ramp/Signal Control (Irvine)• Mobile Surveillance (Orange County)• Wireless Spread Spectrum Communication (Los Angeles);• TransCal (Bay Area to Reno)

11
State-Funded Core Program of ITS Research
The core of the PATH program is its collection of research projects funded by Caltrans’New Technology and Research Program. Currently, there are about 95 such projects,selected on the basis of an annual Request for Proposals (RFP) and proposals submit-ted from throughout California. These involve the work of about 45 professors, rep-resenting 15 academic departments on 14 different university campuses, supervis-ing the research of more than 100 graduate students and post-doctoral researchers.Projects are currently being conducted at: UC Berkeley, UC Davis, UC Irvine, UC LosAngeles, UC Riverside, UC Santa Barbara, California Polytechnic State University atSan Luis Obispo, the Claremont Graduate School, the University of Southern Cali-fornia, Stanford, Rowan University, Ohio State University, MIT, and Texas A&M.
New projectsPATH attracted research support from a variety of sources during the past year. Someof the new projects include:
• Development of enhanced adaptive cruise control, permitting smooth op-erations at low speeds and in stop-and-go traffic, for BMW
• Development of a control system for the Office of Naval Research’s MobileOffshore Base, which will link huge semi-submersible self-propelled bargestogether on the open sea to form a runway for large aircraft
• Implementation of PATH’s magnetic guidance system on a four-mile stretchof Interstate 80 over Donner Summit, in collaboration with the AdvancedHighway Maintenance and Construction Technology Center (AHMCT) at UCDavis, for the initial phases of the Advanced Snowplow Program partnershipamong California, Arizona, and Montana.
• Evaluation of the effectiveness of an innovative rear-collision warning sys-tem, for a major motor vehicle manufacturer.
• Development and assessment of technologies for “Sensor-Friendly Vehicleand Roadway Systems”, in collaboration with Bechtel and Carnegie-MellonUniversity, for the USDOT Intelligent Vehicle Initiative (IVI) program.

12
Other notable developments during the past year included:
• Completion of a nationwide search for a permanent program manager forthe ATMIS Program, leading to the hiring of Pat Conroy from Caltrans, effec-tive July 1, 1999.
• Extension of the PATH research staff capabilities to include expertise in hu-man factors, an important discipline in which we had previously been defi-cient.
• Participation with Caltrans in the development of The Phoenix Project torevive international interest in highway automation, following the demise ofthe National Automated Highway System Consortium in 1998. These effortsculminated in an international workshop in Los Angeles on May 12-14, 1999.

13

14
PATH research is subdivided into two broad categories:• ATMIS - Advanced Transportation Management / Information Systems
(which includes the more traditional categories of ATMS, ATIS and APTS);• AVCSS - Advanced Vehicle Control and Safety Systems (which includes
Automated Highway Systems - AHS);
A summary of 1999 PATH projects by category follows and a list of currentPATH research reports, working papers, and technical notes can be found onon pages 23-28.

15
ment of travel time that will havean incident detection algorithmthat can be integrated with theloop-based algorithm.
• Algorithms for vehicle classifica-tion and traffic flow predictionhave been developed by a re-search team at UC Irvine.
• Another UC Berkeley project isworking on sensor fusion: com-bining data from several surveil-lance technologies and algo-rithms to provide more accurateand robust measurements oftraffic conditions. The aim is tofield test these research productsin a real world environment likethe Berkeley Highway Lab or theATMIS Testbed in Irvine.
Automated Travel Time MeasurementUsing Vehicle Lengths From Loop De-tector Speed Traps, MOU 352; MikeCassidy, UC Berkeley.
Real-Time Algorithms for Travel Timeand Origin-Destination Estimates, In-cident and Verification, MOU 353;Pravin Varaiya, Alexander Skabardonis,UC Berkeley.
Developing and Using SurveillanceData for Research, MOU 356; JoyDahlgren, California PATH.
Adaptive Dynamic MacroscopicFreeway Traffic Flow PredictionModel Using Genetically OptimizedTime-Delay-Based Neural Networks,MOU 360; Baher Abdulhai, Univer-sity of Toronto.
An Investigation in the Use of Induc-tive Loop Signatures for Vehicle Clas-sification, MOU 376; Carlos Sun,California PATH/Rowan University.
Dynamic Origin/Destination Estima-tion Using True Section Densities,MOU 377; Carlos Sun, CaliforniaPATH/Rowan University.
ATMS (AdvancedTransportationManagementSystems)
Surveillance TechnologiesIn the past year, surveillance tech-nologies developed in universitylaboratories made their way ontoreal-world streets and freeways forfield testing.• Research done at UC Irvine using
inductive loop signatures forreidentification was implemen-ted on a local street at two loopstations, providing the research-ers with a 70% match of all ve-hicles passing through the loops.This system is currently beingimplemented at an intersection,to measure the turning move-ments of all the vehicles.
• The Video-Based Vehicle Signa-ture Analysis and Tracking Sys-tem (V2SAT) developed by CalPoly San Luis Obispo was de-ployed and tested at two over-crossings on US 101, and dem-onstrated that it could measuretravel times very reliably.
• Finally, the UC Davis-developedLaser Based detection systemwas deployed on a Sacramentofreeway. Researchers demon-
strated that reproducible vehiclelengths can be obtained fromthe laser system for reidentifi-cation purposes. These tech-nologies will continue to betested in the field this year, alongwith a field test of probe vehiclesusing GPS (global positioningsystem) and cellular technolo-gies.
Section-Related Measures of TrafficSystem Performance: Field PrototypeImplementation, MOU 336; StephenRitchie, UC Irvine.
Use of Los Angeles Freeway ServicePatrol Vehicles as Probe Vehicles, MOU347; James E. Moore II, University ofSouthern California.
Video-Based Vehicle Signature Analy-sis and Tracking System, Phase 2B: Sys-tem Deployment and OperationalTest, MOU 350; C. Arthur (Art)MacCarley, California Polytechnic Uni-versity, San Luis Obispo.
Development of Real-Time Laser-Based Non-Intrusive Detection Systemfor Measurement of True Travel Timeon the Highway, MOU 351; HarryCheng, UC Davis.
Investigation of Vehicles as Probes Us-ing Cellular Phones and the GlobalPositioning System, MOU 378;Youngbin Yim, California PATH.
Development of a Cost-Effective Sur-veillance System in Caltrans District 4,MOU 382; Joy Dahlgren, CaliforniaPATH.
Development and Testing of Field-Deployable Real-Time Laser-BasedNon-Intrusive Detection System forMeasurement of True Travel Time onthe Highway, MOU 3005; HarryCheng, UC Davis.
GPS/GIS Technologies for Traffic Sur-veillance and Management: A TestbedImplementation Study, MOU 3006;Michael G. McNally, UC Irvine.
Field Investigation of Advanced VehicleReidentification Techniques and De-tector Technologies, MOU 3008;Stephen Ritchie; UC Irvine.
Field Operational Test of GPS and Cel-lular Technologies for Vehicle Probes,MOU 3015; Youngbin Yim, CaliforniaPATH.
Traffic EstimationData from various surveillancetechnologies being developed atPATH will lead to better informa-tion both for travelers and trans-portation managers.• A Berkeley Highway Lab estab-
lished by PATH on I-80 includesnine loop detector stations; inthe near future it will be e-quipped with video cameras. Ainductive loop based algorithmhas been field tested in the Ber-keley Highway Lab that will pro-vide real-time speed or traveltime on the web.
• A UC Berkeley team is also devel-oping a vision-based measure-
ATMIS ResearchAdvanced Transportation Management / Information Systems

16
Traffic Data Measurement and Vali-dation, MOU 3000; Ben Coifman,Ohio State University.
Development of Tools to Assess theEffects on Traffic Safety of Changesin Traffic Flow Conditions underATMS Operations, MOU 3007; TomGolob, UC Irvine.
Improving Operations, Driver Infor-mation and Safety Using AdvancedSurveillance Metrics, Wireless Com-munication and Existing Traffic De-tectors/Controllers, MOU 3010;Pravin Varaiya, UC Berkeley, BenCoifman, Ohio State University.
Multi-Sensor Traffic Data Fusion,MOU 3021; Jitendra Malik, UC Ber-keley.
Traffic Control andManagement StrategiesPATH research confirms that thereare benefits to be reaped from bet-ter traffic control and manage-ment strategies.• Real-time signal control at inter-
sections in Los Angeles can re-duce delays for drivers and in-crease capacity on the roads.
• A full analysis of the incident man-agement process in Los Angelesshowed there are areas of im-provement, especially in the areaof dispatching emergency ormaintenance vehicles. More re-search is needed in the area of cor-ridor management, both techni-cally and institutionally.
• This coming year research will fo-cus on the benefits of ramp me-tering and how to increase capac-ity at bottlenecks and weavingsections. A TMC (TransportationManagement Center) Simulatorwill be constructed at the ATMIS
Testbed at UC Irvine to test andtrain operators on new manage-ment and control strategies.
TRICEPS: An ATMIS Field Implementa-tion, MOU 346; Michael McNally, UCIrvine.
Incident Management: Process Analy-sis and Improvement, MOU 354;Randolph Hall, University of SouthernCalifornia.
Implementation of Advanced Tech-niques for Automated Freeway Inci-dent Detection, MOU 358; BaherAbdulhai, University of Toronto.
HOT Lanes and Demand for TravelTime Savings, MOU 361; JoyDahlgren, California PATH.
Benefits of Real-Time Signal Control,MOU 379; Robert Tam, CaliforniaPATH, Alexander Skabardonis, UC Ber-keley.
Access Control Strategies to ManageTraffic Backups and Increase SystemCapacity, MOU 3004; Carlos Daganzo,UC Berkeley.
Examining How ATMIS Can IncreaseFreeway Bottleneck Capacity, MOU3011; Mike Cassidy, UC Berkeley.
Development and Evaluation ofAdaptive Ramp Metering, MOU3013; Michael Zhang, UC Davis.
Development of an ITS Systems Test-ing Center, MOU 3017; Will Recker,UC Irvine.
Simulation andModelingPATH has investigated and exam-ined many traffic models andsimulations for ATMIS applicationsand found that all have their short-comings. The most promising is
the Paramics model, which has avery attractive visual output and isscalable to handle a large network.Also, it provides hooks so othermodelers can attach new modulesto enhance the fidelity of themodel.• UC Irvine is heading the effort to
calibrate and validate theParamics model in OrangeCounty. The first applications ofthe Paramics model will be aramp meter study by UC Davisand an emission modeling proj-ect by UC Riverside.
• In the coming year PATH will de-velop a Paramics modeling capa-bility in the San Francisco BayArea with a ramp metering studyas the first application.
PATH Center for ATMIS Research atUC Irvine, MOU 341; Will Recker, UCIrvine.
Simulation of ITS on the Irvine FOTArea Using The Paramics ScalableMicroscopic Traffic Simulator, MOU359; Baher Abdulhai, University ofToronto.
Assessment of the Effectiveness ofATMIS Strategies, MOU 362;Alexander Skabardonis, UC Berkeley.
Integrating a Comprehensive ModalEmission Model into ATMIS Trans-portation Modeling FrameworksMOU 381; Matthew J. Barth, UC Riv-erside.
Development of a Simulation Capa-bility to Support ATMIS Studies,MOU 399; Bruce Hongola, CaliforniaPATH.
Fabrication of Integrated TMC Simu-lator Facility, MOU 3014; Will Recker,UC Irvine.
ATIS (AdvancedTravelerInformationSystems)The TravInfo Field Operational Testevaluation performed by PATH inthe San Francisco Bay Area re-vealed that ATIS does affect travel-ers choices of departure time androute. Travelers value the informa-tion and are pleased with theTravInfo telephone system andvarious traffic web pages that useTravInfo data.• Devices like the multimodal
travel planner prototype devel-oped at UC Davis, which haveaccess to a rich dataset of trans-portation information, can beused to discover the fastest orcheapest way to travel.
• A field test around the Anaheimbaseball stadium deployedchangeable message signs di-recting the drivers to the sta-dium. Measurable delay savingsoccurred when the traffic flowswere balanced and distributedaround the special event.
Daily Activity and MultimodalTravel Planner, MOU 339; RyuichiKitamura, UC Davis.
Caltrans D10 Fog Monitoring Sys-tem, MOU 342; 350; C. Arthur (Art)MacCarley, California PolytechnicUniversity, San Luis Obispo.
The Provision of Traffic Informa-tion—A Study of Supply and MarketStructure, MOU 344; Adib Kanafani,UC Berkeley.

17
Event-Based ATIS: Practical Imple-mentation and Evaluation of Opti-mized Strategies, MOU 348; R.Jayakrishnan, UC Irvine.
Consumer Research on ATIS Tech-nologies: Surveys of ATIS Users,MOU 363; Youngbin Yim, CaliforniaPATH.
Financing Plan for Public SupportedATIS, MOU 364; Youngbin Yim, Cali-fornia PATH.
An Experiment in Privatizing the Op-erations of Regional Transporta-tion Information/Management Cen-ters: How well is it Working? MOU365; Mark Miller, California PATH.
ATIS for Ground-to-Air Connectivity,MOU 3003; Randolph Hall, Univer-sity of Southern California.
APTS (AdvancedPublic TransportationSystems)A new paradigm for public trans-portation must be developed inorder for it to be a viable optionfor many travelers. The systemmust be flexible and reliable. PATHhas started an aggressive researchagenda to develop new systems tomeet the needs of the traveler fordoor to door service.• CarLink is a smart carsharing sys-
tem tested in conjunction withthe San Francisco Bay Area RapidTransit (BART) system. BART rid-ers can reserve cars that will bewaiting for them at their desti-nation to drive from the stationto work. While they are at work,the car can be used by otherpeople for errands or other ac-tivities.
• A research project at UC SantaBarbara tested a “talking sign”device that allows visually im-paired transit users to find theirway around the bus terminal andboard the correct bus. Similarresearch is needed to developways to make it easier and moreattractive to use public transit.
San Gabriel Valley Smart ShuttleTechnology Field Operational TestEvaluation, MOU 340; GenevieveGiuliano, James E. Moore II, Univer-sity of Southern California.
Assistive Devices and Services for theDisabled, MOU 343; Reginald G.Golledge, UC Santa Barbara.
Efficient Transit Service Through theApplication of ITS, MOU 345;Randolph Hall, University of South-ern California.
Design, Implementation, and Evalu-ation of an APTS, Intermodal FieldTest of Car Sharing: A Case Study ofthe Bart Station Car Program, MOU349; Daniel Sperling, UC Davis.
Assessing Opportunities for Intelli-gent Transportation Systems inCalifornia’s Passenger IntermodalOperations and Services, MOU 375;Mark Miller, California PATH.
User, Economic, and InstitutionalEvaluation of “Smart” Car Sharing,MOU 380; Daniel Sperling, UCDavis.
Consumer Research on PersonalizedDemand-Responsive Transit Service,MOU 398; Youngbin Yim, CaliforniaPATH.
Evaluating the Impact of ITS on Per-sonalized Public Transit, MOU 3002;Maged Dessouky, University ofSouthern California.
Expanded, Year-Two CarLink Dem-onstration: A User, Economic, and
Institutional Evaluation of “Smart”Carsharing, MOU 3009; DanielSperling, UC Davis.
Decision Supportand Benefit/CostAnalysisDecisions on transportation im-provements are sometimes madewithout hard facts or weighing allthe options. PATH has embarkedon a quest to collect the neededinformation to make an intelligentdecision for transportation plan-ners and managers.• PATH’s LEAP website (now ITS
Decision) has a huge body of lit-erature from field test evaluationor studies on Intelligent Trans-portation Systems. This websiteallows a person to check otherpeople’s experience with a par-ticular technology or system be-fore implementation.
• A Freeway Performance Measure-ment System (PeMS) has beendeveloped and implemented inCaltrans District 12. This systemallows the user to see if the trans-portation system is performingbetter or normal with easy tounderstand real-time measure-ments.
• A rigorous cost/benefit analysisframework has been developedat UC Berkeley to be used byplanners to estimate the value ofdifferent ITS strategies. Research-ers have investigated ElectronicToll Collection, Ramp Metering,and Advanced Traveler Informa-tion Systems, and are currently
looking at ITS in public transitand the Freeway Service Patrolservice.
Identification and Prioritization ofEnvironmentally Beneficial Intelli-gent Transportation Technologies:Year Two, MOU 337; DanielSperling, UC Davis.
California Systems ArchitectureStudy-Part III, MOU 338; Tom Horan,Claremont Graduate School,Randolph Hall, University of South-ern California.
ITS Evaluation Website, MOU 355;Joy Dahlgren, California PATH.
Cost-Benefit Analysis for ITS Man-agement Decisions, MOU 357;David Gillen, UC Berkeley.
Evaluation Methods for Measuringthe Value of ITS Services and Benefitsfrom Implementation, MOU 3001;David Gillen, UC Berkeley.
Freeway Performance MeasurementSystem, Phase II, MOU 3012; PravinVaraiya, UC Berkeley.
Technology Transfer and the PATHproject, MOU 3016; Linda Howe, UCBerkeley.
Institutional Initiatives: Interdiscipli-nary Investigation In Support of anITS-based Traveler Information Sys-tem, MOU 3019; J. Karl Hedrick, UCBerkeley, Thomas Horan, ClaremontGraduate University.

18
Advanced Vehicle Control and Safety Systems
AVCSS Research
Control of Heavy-Duty VehiclesIn the past year, a Class 8 tractor-trailer combination was instru-mented for the experimental dem-onstration of lateral and longitudi-nal controls of heavy-duty vehicles.Both open-loop and closed-looplateral control experiments wereconducted.• A gain-scheduled H-infinity opti-
mal controller with look-aheadlateral error as the control feed-back and a loop-shaping control-ler for steering actuators was de-signed and tested in closed-loopfor speeds up to 45 mph. Thesecontrollers will continue to befine-tuned. For longitudinal con-trol, a series of open-loop experi-ments on throttle and brake re-sponse were conducted to deter-mine the gains, time constantsand delays present in the throttleand brake dynamics. Closed-loopexperiments were also con-ducted by adding brake actua-tors and implementing controlschemes with smaller intervehiclespacings.
• A framework has been developedfor integrating and coordinatingadvanced compression brakingmethods with conventional brak-ing systems for longitudinal con-
trol of heavy duty vehicles. It wasconcluded that the compressionbraking is a good vehicle retarderbecause it combines high brak-ing capability with fuel economybenefits and emission reduction.
• A generic power-train simulationmodel for longitudinal control ofa Class 8 truck has been devel-oped to accurately represent thetransient and nonlinear behaviorof the engine and the vehicleduring the transition from maxi-mum combustion power tomaximum engine brake power.In the next phase, the enginebraking model and the vehicledynamics will be integrated.Controllers for coordinating con-ventional brakes with compres-sion brakes will then be de-signed.
• Two new projects that started in1999 deal with robust longitudi-nal control of trucks and the per-formance of trucks with vehiclecontrol systems in safety-criticalconditions.
Lateral Control of Heavy-Duty Ve-hicles for AHS, MOU 313; MasayoshiTomizuka, UC Berkeley.
Longitudinal Control of Heavy-DutyVehicles: Experimental Evaluation,MOU 314; Ioannis Kanellakopoulos,UCLA.
Advanced Braking Methods for Lon-gitudinal Control of CommercialHeavy Vehicles; MOU 372, AnnaStefanopoulou, UC Santa Barbara.
Robust Lateral Control of Heavy DutyVehicles, MOU 385; MasayoshiTomizuka, UC Berkeley.
Safety Performance and Robustnessof Heavy Duty Vehicles, MOU 390;Christian Gerdes, Stanford University.
Integrated Longitudinal Control forSafe Automation of CommercialHeavy Vehicles, MOU 393; ChristianGerdes, Stanford University, IoannisKanellakopoulos, UCLA, AnnaStefanopoulou, UC Santa Barbara.
Vehicle ControlExperiments andField TestsA significant portion of the AVCSSwork at PATH requires experimen-tal vehicles to support the research,development, testing and valida-tion of the control systems. In thepast year, PATH has supportedhardware and software develop-ment for demonstrating low-speedprecision docking, testing vehiclecontrols for heavy-duty vehicles,preparing communication systemson the vehicles, and supporting theresearch on DGPS/INS system for
vehicle location. The PATH experi-mental group will continue to pro-vide support for the projects onheavy-duty vehicles, longitudinalcontrol code revision, failure diag-nosis and mitigation, evaluation oflongitudinal range and range ratesensors, communication systems,and vehicle location.
Vehicle Control Experimental Re-search and Support, MOU 331; DanEmpey, PATH.
Vehicle ControlUnder AbnormalConditionsThe performance and robustness ofthe PATH magnetometer-based lat-eral control system when either thefront or rear set of magnetometersfails has been evaluated both ana-lytically and experimentally. It hasbeen shown that magnetometerfault tolerance can be achieved atlow speeds by modifying existingcontrol schemes. In the next phasethe autonomous lateral control sys-tem, based on the IRIS technologydeveloped to measure the lateralerror and yaw error relative to thevehicle in front, will be studied andcombined with the magnetometer-based lateral control system to en-hance safety and reliability perfor-mance.• A model for emergency platoon
deceleration has been developedfor SmartAHS. The model calcu-lates the lateral, longitudinal, andyaw velocities of two vehicles af-ter impact. In a parallel develop-

19
ment, emergency platoon decel-eration maneuvers for a multiple-vehicle platoon were modeledusing the hybrid input-outputautomata modeling language. Aprobabilistic estimate of collisionseverity was made based on aprobability distribution on thedeceleration capability of the ve-hicles.
Emergency Operation of Platoons:Collisions, Emergency Decelerationand Platoon Lane Change, MOU 319;Hariharan Krishnan, PATH, DarbhaSwaroop, Texas A&M University.
Vehicle Lateral Control Under Faultin Front and/or Rear Sensors, MOU384; Masayoshi Tomizuka, UC Ber-keley.
Fault Diagnosisand ManagementEfforts have been devoted to de-veloping and enhancing compo-nents of the fault diagnostic sys-tem for lateral control and the de-tection and processing of multiplefaults in the longitudinal controlsystem. A hierarchical structure forfault detection and identification inthe lateral control system has beenconstructed. This structure useshealth signals in various sensorsand actuators as local fault detec-tors.• The specific problem of detection
and reconfiguration of the sys-tem when the front or rear mag-netometer information is lost hasalso been analyzed. A significantdevelopment is the idea of afault-tolerant controller. This con-troller simultaneously stabilizes
both the nominal and faultyplant. The identification of faultsvia residual processing has beeninvestigated for the longitudinalcontrol system. An extended re-sidual processor, which uses ad-ditional residuals and fuzzy logicto perform a deeper diagnosis,has been developed to correctlyidentify both single and doublefaults in the longitudinal controlsystem.
• A fault diagnostic system that re-sides in the application layer of alayered communication architec-ture was designed for detectingintraplatoon communicationfaults. The diagnosers, plant andcommunication channel wereformally described by the SHIFTprogramming language for hy-brid automata; specifically thePetri net approach for modelingfault diagnosis in distributed sys-tems. The logical correctness ofthe design is ver i f ied byKRONOS, a timed automata veri-fication tool.
Design of Fault Tolerant Control Sys-tems for AHS: Fault Detection, FaultHandling and Verification, MOU 312;Roberto Horowitz, UC Berkeley, KarlHedrick, UC Berkeley.
Integration of Fault Detection andIdentification into a Fault TolerantAHS, MOU 315; Jason Speyer, UCLA.
System Fault Detection in Human-Augmented Automated Driving,MOU 323; Theodore Cohn, UC Ber-keley.
Failure Diagnosis and MonitoringDesign for Intra-Platoon Communi-cation Systems, MOU 332; RajaSengupta, PATH.
Development and Implementation ofa Vehicle-Centered Fault Diagnosticand Management System for the Ex-tended PATH-AHS Architecture, MOU373; Masayoshi Tomizuka, RobertoHorowitz, Karl Hedrick, UC Berkeley
Vehicle BrakingControlPATH has developed a torque-based brake controller to improvebrake controller performance incases when brake pressure feed-back is not sufficient. The control-ler was experimentally tested andthe result showed that there was asudden drop in brake torque as afunction of pressure gain during askid. A differential braking controlalgorithm, based on an extensionof the Adaptive Feedforward can-cellation technique, has been de-veloped to adaptively cancel brakerotor warp-induced vibrations. Thealgorithm has been tested in simu-lation, and it will be experimentallytested in the next phase.
Brake System Modeling, Control andIntegrated Brake/Throttle Switching,MOU 308; Karl Hedrick, UC Berke-ley.
AHS SafetyAnalysis andSimulationTwo projects studying the severityof vehicle-following collisions havebeen completed In the past year.A single vehicle model was devel-oped to model the deformation of
a vehicle body in one of theprojects. Using this model, a colli-sion-detection algorithm was de-veloped to detect possible colli-sions between vehicles. The algo-rithm performs a series of localminimizations of a distance func-tion between two ellipsoids repre-senting two vehicles.• In another project, the effects of
collisions in vehicle-following op-erations and the dynamics ofpost-impact vehicle motionswere studied using a simulationpackage. Several crash scenarioswere simulated to reflect themost critical failure conditionsthat might occur. Those failuresinclude: a miscommunicationfrom the leading vehicle to thefollowing vehicle, a failure in therange sensor on the followingvehicle, or a failure in the brakeactuator on the following vehicle.Several parameters, such as ini-tial spacing between the two ve-hicles as well as vehicle speedwere varied in the simulated sce-narios. Revisions to the sourcecodes were also made to imple-ment a closed-loop controlmodel with the crash and dy-namic models.
• Vehicle control algorithms cannow be tested in crash scenariosto examine the feasibility and ef-fectiveness of controlling vehiclemotions during or after a colli-sion. The vehicle maneuvers in-clude steering and braking inputsto perform lane following or lanechanging.
• Safety analysis and evaluation ofadvanced vehicle control and

20
safety systems such as vehiclelongitudinal and lateral controlsystems has also been per-formed, so that errors in the pro-cess of specification, design, de-velopment, and integration canbe revealed prior to the imple-mentation of the new technolo-gies, and hazardous conse-quences can be prevented. Thiseffort will continue.
Models of Vehicular Collision: De-velopment and Simulation with Em-phasis on Safety , MOU 309; OliverO’Reilly and Panayiotis Papadopoulos,UC Berkeley.
Studies of Collision in Vehicle Follow-ing Operations by Two-DimensionalImpact Simulation, MOU 324;Ching-Yao Chan, PATH.
Safety Evaluation of Vehicle Follow-ing Operations by Fault Tree and Sen-sitivity Analysis, MOU 325; Ching-YaoChan, UC Berkeley, J. Bret Michael,Naval Postgraduate School.
Development of Integrated Meso/Microscale Traffic Simulation Soft-ware for Testing Fault Detection andHandling in AHS, MOU 383; RobertoHorowitz, UC Berkeley.
Safety Assessment of Advanced Ve-hicle Control and Safety Systems(AVCSS): A Case Study, MOU 395;Wei-Bin Zhang, Ching-Yao Chan,PATH.
CommunicationSystemsA difficult task in the design of ve-hicle-vehicle and vehicle-roadwaydata communication systems forthe regulation and coordinationlayers is the design of protocols for
vehicle address resolution, configu-ration management, and routing.An address resolution protocol(ARP), a distributed algorithm thatdefines the binding and maps thelogical identifier of a user to itsphysical location, was designed foran AHS with only one lane. Theconfiguration management prob-lem is a dynamic address resolu-tion problem, since the updatingprocess of an ARP provides a meansto figure out how the compositionof a subnet of radios that commu-nicate with each other changes.Configuration management is aprerequisite to routing. In this pastyear, a configuration protocol anda routing protocol were also de-signed and verified.• A hierarchical communication
structure has been designed thatcan support a mobile environ-ment with the distinct character-istic that the communicationnetwork’s topology changes andhas to be adapted as the mobiles(vehicles and platoons) move.This structure has also been simu-lated using SHIFT and SmartAHS.The communication architecturedeveloped has five layers: physi-cal layer, data link layer, networklayer, transport layer, and appli-cation layer. The communicationnetwork was designed to providea quality of service (QOS) inter-face that meets the needs of thecontrol applications. Examples ofQOS parameters are delay, jitter,loss probability, average bit rate,and burst size. Development ofQOS specifications are beingcontinued.
• A new project that started in1999 is devoted to designing ro-bust communication link anddata access protocols by consid-ering the problem that the over-all communication architecturefor an AHS is complicated by thepropagation environment of thesignals, the existence of multipleinterference signals, and themobility and dynamic characterof platoons.
Address Resolution, ConfigurationManagement, and Routing in Wire-less Communication for AVCSS, MOU318; Pravin Varaiya, UC Berkeley
PATH Laboratory, MOU 329; RajaSengupta and Chin-Woo Tan, PATH
Designing a Framework for Vehicle-to-Vehicle and Vehicle-to-RoadsideCommunication, MOU 334; RajaSengupta, PATH
A Robust Communication Link andArchitecture Design for AHS, MOU389; Andrea Goldsmith, StanfordUniversity
Advanced VehicleLocation SystemsIn the past year a carrier-phase dif-ferential GPS-aided inertial naviga-tion system (INS) was integratedinto current vehicle control systemsat PATH. Information available fromthe GPS-aided INS was analyzed toimprove accuracy and evaluate dif-ferent mechanisms for using the in-formation for vehicle control. Ex-isting vehicle control software wasmodified so that GPS-aided INSdata can be used. The interface
between the GPS-aided INS soft-ware and the vehicle control soft-ware was implemented. The soft-ware developed was tested andevaluated on a PATH vehicle, sothat the GPS/INS combination canbe compared to magnetometerinformation. The robustness of theintegrated magnetometer andGPS/INS system was evaluated toachieve the performance and reli-ability necessary for automatedvehicle control. A demonstration ofclosed-loop vehicle control basedon data from the integrated systemwill be performed on a PATH ve-hicle.• An inertial navigation system con-
sisting of a distributed array ofaccelerometers was developedunder another project to esti-mate the position of a movingrigid body. More precise positionestimates are obtained with acombination of INS measure-ments and GPS reference datasource. However, since both theINS measurements and GPScodes have unpredictable em-bedded error sources, algorithmswere developed to filter out theerrors in the data provided by theINS and GPS receivers.
• Error-correction algorithms havebeen developed to correct or es-timate error sources that include:bias and scale (nonlinearity) er-rors of accelerometers, tempera-ture-dependent drift errors, loca-tion and orientation errors of ac-celerometers, cross-axis sensitiv-ity error between a pair of accel-erometers, random noise of sen-sors and supporting electronics,

21
attitude (reference frame) errors,and numerical (integration) er-rors. These algorithms will con-tinue to be simulated and experi-mentally tested.
Aggregation of Direct and IndirectPositioning Sensors for Vehicle Guid-ance, MOU 322; Alice Agogino, UCBerkeley.
GPS-Based Error Correction of Gyro-Free Inertial Navigation System,MOU 371; Chin-Woo Tan, PATH.
Integration of GPS-aided INS intoAVCSS, MOU 374; Jay Farrell, Mat-thew Barth, UC Riverside.
Integration of GPS/INS and MagneticMarkers for Advanced Vehicle Con-trol, MOU 391; Jay Farrell, UC River-side.
AerodynamicsExperimental evaluation of tran-sient aerodynamic effects on auto-mated vehicles was continued, us-ing scale mode vehicles in a windtunnel. Experiments were con-ducted to measure and character-ize the transient aerodynamicforces on vehicles traveling in closeproximity to each other and theirimpacts on vehicle controllability.The effects of transient vehiclemovements, such as lane changes,were tested to understand thechanges of aerodynamics on theperformance of vehicles. Thechanges of drag forces and theimpact on fuel economy, and theeffects of the side force and yawmoment on vehicle stability andcontrollability, were also studied.• Vehicles that operate in close
proximity interact aerodynami-cally. These interactions definethe aerodynamic forces uponeach vehicle and the flowfield inthe immediate vicinity of the ve-hicles. A series of field tests werecompleted to measure the dragforces of both members of a two-car platoon at close spacing.These field tests were conductedto provide an independent veri-fication of the wind tunnel pre-dictions. The results show sub-stantial correspondence betweenfull-scale and wind tunnel mea-surements. Quantitative flowfieldmeasurements were performedusing the Digital Particle ImageVelocimetry (DPIV) technique.The field tests were carried outat the El Mirage dry lake wherethe image of flowfield structurewas made visible by the dustswept up from the floor of thelake. The results have demon-strated the existence and impor-tance of a large-scale turbulentvortex structure within theintervehicle flowfield. This struc-ture produces fluctuating forcesthat must be anticipated andovercome by the control algo-rithms.
• A new project was started in 1999to carry out wind tunnel mea-surements of drag and potentialfuel savings for two scale modeltractor-trailers in tandem at shortheadway. Measurements will alsobe made to derive sufficient ve-hicle roll stability margin for safehandling of Class 8 trucks at highspeeds and under strong cross-wind conditions.
Transient Aerodynamic Vehicle Inter-actions, MOU 307; Omer Savas, UCBerkeley
Transient Aerodynamics in theIntervehicle Flowfield; MOU 321,Frederick Browand, USC
The Aerodynamics of Heavy Trucks,MOU 387; Frederick Browand, USC
AVCSS ConceptsIn the past year, predictions ofspacings that could be used be-tween automated vehicles in orderto improve both highway through-put and safety were developed. Analgorithm that calculates the mini-mum longitudinal spacing that thevehicles should initially have wasdeveloped to determine if a par-ticular lane changing or mergingmaneuver would be free of colli-sions. The traffic flow of a highwaysystem in which manual andsemiautomated (ACC) vehicles aremixed under some conditions wasalso evaluated.• Microscopic analysis of the effect
of ACC vehicles on the transientbehavior of traffic flow was con-ducted. It was shown that whena manual vehicle in front per-forms smooth acceleration ma-neuvers, an ACC vehicle behindis free of slinky effect and canaccurately track the position andvelocity of the front vehicle.When the lead vehicle acceler-ates rapidly, the ACC vehicle fil-ters out such response and main-tains a smooth traffic flow. Thisis done, however, at the expenseof larger position, velocity, andacceleration errors, and some-
times at the expense of fallingbehind the vehicle ahead.
• By using simulations it was dem-onstrated that the fuel consump-tion and pollution levels presentin manual traffic modeled by thePipes linear car following modelcan be reduced during rapid ac-celeration transients by 7.3% and15%-20% respectively due to thepresence of 10% ACC vehicles.A new project started in 1999 willcarry out actual vehicle follow-ing experiments to validate theanalytical and simulation results,and quantify the benefits of ACCvehicles in mixed traffic.
• Another new project will deter-mine how the interface betweenthe AHS and the arterial streetnetwork could be designed to ac-commodate the high volume ofAHS traffic, and evaluate ways tomaximize the benefits that ac-crue from added capacity. Thefocus is on how to accommodateconcentrations of capacity withinnarrow corridors or a limitednumber of interchanges, and itsimplications on the surroundingstreet system.
Evaluation and Analysis of AHS Con-cepts and Architectures, MOU 304;Petros Ioannou, USC
Mixed Automatic and Manual Traf-fic, MOU 317; Petros Ioannou, USC
Sensor-Friendly Highways: Investiga-tion of Progressive Roadway Changesto Facilitate Deployment of AHS,MOU 368; James Misener, PATH
The AHS/Street Interface Effects ofCapacity Concentrations on SystemPerformance; MOU 386; RandolphHall, USC

22
Evaluation of the Effects of ICC Ve-hicles in Mixed Traffic; MOU 392,Petros Ioannou, USC.
Bus Rapid TransitThe safety of systems that provideguidance and possibly control tobuses for precision docking at high-level platforms to permit easy ac-cess by elderly and handicappedriders was studied. Two types ofautomated docking systems havebeen developed to show that busescan be made to dock consistentlyat precisely the desired distance tothe curb, thus eliminating the gapbetween bus and docking plat-form. The first type, a docking as-sistance system, tells the driverwhere the bus is with respect to thedock. The second type provides fullor partial-authority automatic con-
trol of the bus during docking: thedriver lets the automated systemdrive or steer the bus.• For a docking system to be op-
erational, its safety issues mustbe evaluated in the environmentof the intended use. Differentways to collect, manage, andpresent safety information aboutautomated docking systems toregulatory, certification, andother decision-making commit-tees have been studied. An ini-tial set of safety considerationsfor building safety cases for au-tomated bus docking systemswas developed. They are basedon field observations of manualbus docking in downtown SanFrancisco, which has a high vol-ume of transit bus and other traf-fic such as pedestrians and bicy-clists.
• PATH has developed a precisiondocking system for automobilesand demonstrated robust perfor-mance for docking with an ac-curacy of 1.5 cm distance fromthe curb. This precision dockingsystem will be implemented ona bus to demonstrate that theprecision docking system canprovide superior docking accu-racy and reduce the stress of thebus operator. The design anddevelopment of an actuator sys-tem, the installation of magne-tometers, computer and dataacquisition system, and the de-velopment of data processingand control software will be con-tinued.
• A new project was started in 1999to identify and investigate theinstitutional aspects of Bus RapidTransit (BRT) in California, and
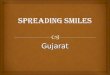
PATH’s automated vehicle demonstration at the 1999 CaliforniaAlliance for Advanced Transportation Systems Annual Meeting,held 13-15 September in Sacramento, formed an integral part ofa Caltrans exhibit that brought home one of the meeting’s Awardsof Excellence. Speeding forward and in reverse through cones ona half-mile track with very tight (39m radius) turns, a fully auto-mated PATH Buick LeSabre demonstrated precision lateral controlas well as precision automated docking. Passengers were impressedas the vehicle took the tightest turn at 0.5 g, no-hands, no-feet.“Fascinating,” said Bernie Orozco, principal consultant to Califor-nia Senate Majority Leader Richard Palanco, at the end of his ride.
Also on display at the Caltrans exhibit were automated highwaymaintenance vehicles from the Advanced Highway Maintenance
and Construction Technology Center at UC Davis (AHMCT). Fea-tured were the Advanced Snowplow, which uses the PATH Mag-netic Guidance System, and a front loader, cone truck, and herbi-cide-spray vehicle.
From left to right: Caltrans staffers Jan Hoggatt, Pete Hansra, PATHliaison Greg Larson, Larry Baumeister, Hassan Aboukhadijeh, BillOkwu, and Asfand Siddiqui with the award, inscribed:
1999 Award of ExcellenceCAATS Civic Entrepreneur
presented to the Caltrans Office ofAdvanced Highway Systems.
PATH, AHMCT Win Award for Caltrans
recommend strategies for theresolution of the institutional is-sues. The investigation will in-clude an appreciation of what is-sues there are, their relative levelof importance, and their likeli-hood of occurring. Promisingsites that will facilitate the opera-tion of an efficient BRT will beidentified.
Safety Analysis of Concept Systemsfor Guidance and Control of TransitBuses, MOU 327; Bret Michael, Na-val Postgraduate School.
Institutional Aspects of AutomatedBus Rapid Transit Operation, MOU394; Mark Miller, PATH.
Develop Precision Docking Functionfor Bus Operation; MOU 397, Han-Shue Tan, PATH.

23
PATH researchers share the results of their work in a variety of media: demonstra-tions, presentations, research reports, via PATH’s newsletter Intellimotion, on the Web,on PATH’s own videos, and by cooperating with the many interested news organiza-tions who come to PATH to do interviews and shoot video and photographs. Thepast year saw video and radio production crews from Australia, Britain, Japan, andthe US at the Richmond headquarters.
Video and PhotoPATH’s Publications group supports news organizations with our own stock photo-graphs and video footage, as well as producing video and still images for PATH’sown use. 1999 saw PATH research featured on local, state, national and interna-tional, news and documentary programs, and at least one network’s wrap-up of themillennium included a fleeting glimpse of PATH automated cars hurtling into thefuture.
Reports and PresentationsPATH produced almost a hundred research reports, working papers, technical notes,and specialty brochures, plus an annual report and well over a thousand pieces ofmaterial for presentations, trade show exhibits, and informational booths. (PATHresearchers presented at over 60 conferences, workshops, and seminars last year.)
PATH Web SiteMuch of this work, along with a What’s Newpage, an index to PATH research projects and re-searchers, a media info page, and links to otherITS sites, is available on the Web at http://www.path.berkeley.edu/
IntellimotionPATH’s world-class newsletter serves to explainPATH research to people who have a professionalinterest in intelligent transportation systems butare not necessarily specialists in the field beingdiscussed. Intellimotion mainly covers advances inPATH’s own research, occasionally reaching far-ther afield, as far as Europe or Asia, to explorenew work of particular interest to PATH partners.Intellimotion appears four times a year. Recent is-sues have looked at recent advances in car shar-ing, paratransit, high occupancy vehicle/tolllanes, collision avoidance, intelligent traffic sur-veillance, advanced traffic control and PATHprojects in progress. For a free subscription toIntellimotion, contact Bill Stone, PublicationsManager–by phone at (510) 231-5601 or byemail at [email protected].
Intellimotion is available on the Web at:www.path.berkeley.edu/PATH/Intellimotion
Information and Media

24

25
ATMIS(Advanced Transportation Man-agement / Information Systems)
ATMS (Advanced Transporta-tion Management Systems)
Advanced Image Sensing Meth-ods for Traffic Surveillance andDetectionArt MacCarleyThe goal is improved visibility un-der conditions of fog or dust usingwavelengths longer than that ofthe visible spectral band. Tech-nologies considered included tentypes of infrared video camerasand one millimeter-wave still-frame imaging system. Evaluationcriteria were structured to reflectthe surveillance needs of trafficmanagement center personneland information needs of com-puter vision systems.UCB-ITS-PRR-99-1*March 1999, 125 pages, $20
Individual Vehicle Speed Estima-tion Using Single Loop InductiveWaveformsCarlos Sun, Stephen G. RitchiePreviously, speeds were mainly ac-quired from double inductiveloops configured as speed traps,since single-loop speed estimatesbased on assumptions of a con-stant vehicle length were inaccu-rate. More accurate measurementscan now be accomplished withsingle loops by utilizing inductivewaveforms of vehicles output fromnewer detector cards. Using theextensive single loop surveillanceinfrastructure is a cost-effectiveway of obtaining more accuratenetwork-wide travel time informa-tion.UCB-ITS-PWP-99-14*October 1999, 31 pages, $10
Empirical Comparison of TravelTime Estimation MethodsXiaoyan Zhang, John Rice, PeterBickeThe methods concerned are a re-gression method based on an in-
mit video imagery to a traffic man-agement center in support of arte-rial traffic signal control, and theInterstate-5 Test, which evaluatedthe ability of the mobile surveil-lance and ramp meter trailers totransmit video imagery and data insupport of freeway ramp metering.This volume describes project ob-jectives, results, conclusions, andrecommendations.UCB-ITS-PRR-99-6March 1999, 45 pages, $10
Mobile Surveillance and WirelessCommunication Systems FieldOperational Test. Final Report:Volume 2: FOT Objectives, Orga-nization, System Design, Results,Conclusions, and Recommenda-tionsLawrence A. KleinDiscusses overall goals and objec-tives of the FOT and the design ofthe mobile surveillance and wire-less communication system. Spe-cific objectives of the AnaheimSpecial Event and the I-5 Tests, les-sons learned, test results, and rec-ommendations are expanded on.Photographs and drawings areused liberally to illustrate the typesof equipment and test configura-tions that were tested.UCB-ITS-PRR-99-7March 1999, 164 pages, $25
Mobile Surveillance and Wire-less Communication SystemsField Operational Test. FinalReport: Volume 3: AppendicesA-J Containing Evaluation DataGathered During the AnaheimSpecial Event and I-5 TestsLawrence A. KleinConsists of ten appendices thatcontain data and other informa-tion gathered during the tests.UCB-ITS-PRR-99-8March 1999, 471 pages, $50
Vehicle Reidentification andTravel Measurement on Con-gested FreewaysBenjamin CoifmanPresents a vehicle reidentificationalgorithm for consecutive detectorstations on a freeway. Using this
tuitive model, and the conven-tional method of using an identityrelating speed, flow, and occu-pancy with the assumption of acommon vehicle length.UCB-ITS-PRR-99-43*December 1999, 46 pages, $10
Short Term Freeway TrafficFlow Prediction Using Geneti-cally-Optimized Time-Delay-Based Neural NetworksBaher Abdulhai, Himanshu Porwal,Will ReckerPresents a new short term trafficflow prediction system based onan advanced Time Delay NeuralNetwork model, the structure ofwhich is optimized using a GeneticAlgorithm. The model predictsflow and occupancy values at agiven freeway site based on con-tributions from their recent tempo-ral profile as well the spatial con-tribution from neighboring sites.UCB-ITS-PWP-99-1*January 1999, 42 pages, $10
Identifying the Onset of Con-gestion Rapidly with ExistingTraffic DetectorsBenjamin CoifmanPresents a new approach for traf-fic surveillance using existing dualloop speed detectors. Instead ofreporting local conditions at detec-tors, this new strategy identifieswhen the link between two detec-tor stations becomes congested.The proposed strategy is shown tobe compatible with the existingdetector infrastructure. It is in-tended to augment local measure-ments made by conventional sur-veillance strategies.UCB-ITS-PWP-99-17*November 1999, 23 pages, $5
Mobile Surveillance and Wire-less Communication SystemsField Operational Test. FinalReport: Volume 1: ExecutiveSummaryLawrence A. KleinThis project comprised two evalu-ation tests, the Anaheim SpecialEvent Test, which assessed the abil-ity of surveillance trailers to trans-
algorithm, a vehicle measurementmade at a downstream detectorstation is matched with a corre-sponding measurement at an up-stream station. Measured vehiclelengths from paired loop detectorspeed traps are used to illustratethis method. The algorithm rulesout unlikely matches, and alsoeliminates unlikely sequences.UCB-ITS-PWP-99-18*November 1999, 23 pages, $5
Visualizing Loop Detector DataXiaoyan Zhang, John RiceThe information in large loop de-tector datasets accumulated overthe years by transportation man-agement centers often lies dor-mant, partly because of the lack ofeffective means to display thedata. We present a simple visual-ization technique using color-en-coded images to visualize loop de-tector measurements as a functionof space and time.UCB-ITS-PWP-99-21*December 1999, 11 pages, $5
Evaluation of the Anaheim Ad-vanced Traffic Control SystemField Operational Test: Intro-duction and Task A: Evaluationof SCOOT PerformanceJames E. Moore, II, M. G. McNally, C.Arthur MacCarley, R. JayakrishnanOverview of the federally-spon-sored FOT, and of the technical is-sues associated with the evaluationof SCOOT performance during thistest. Summarizes an introductionto the project, the evaluation ob-jectives for Tasks A and B, and TaskC of the three part evaluationproject. Separate reports summa-rize Tasks B and C, assessment ofinstitutional issues and the ad-vanced Video Detection Systems,respectively.UCB-ITS-PRR-99-26July 1999, 134 pages, $20
Evaluation of the Anaheim Ad-vanced Traffic Control SystemField Operational Test: Execu-tive SummaryM.G. McNally, James E. Moore, II, C.Arthur MacCarley, R. Jayakrishnan
Recent PATH PublicationsResearch Reports, Working Papers, and Technical Notes from January 1 - December 31, 1999 are listed below.Those marked with an asterisk (older and more recent publications also) can be found on the World Wide Webat:http://www.path.berkeley.edu/PATH/Publications

26
The primary FOT objective was theimplementation and performanceevaluation of adaptive traffic sig-nal control technologies includingan existing second generation ap-proach (SCOOT), and a 1.5 gen-eration control (1.5GC) approachunder development. Also selectedfor implementation was a videotraffic detection system (VTDS).Both SCOOT and the VTDS wereimplemented with some degree ofsuccess, with technical and institu-tional issues limiting expected per-formance.UCB-ITS-PRR-99-18July 1999, 15 pages, $5
Predictability of Time-Depen-dent Traffic Backups and OtherReproducible Traits in Experi-mental Highway DataKaren R. Smilowitz,Carlos F. DaganzoTraffic data from a 4-mile long con-gested rural road in Orinda, Cali-fornia, are used to show that traf-fic delays and vehicle accumula-tions between any two genericobservers located inside a roadsection can be predicted from thetraffic counts measured at the ex-tremes of the section. The trafficmodel does not require “recali-bration” on the day of the experi-ment, and works well despite whatappears to be location-specificdriver behavior.UCB-ITS-PWP-99-5*March 1999, 35 pages, $10
The Access Control Problem onCapacitated FIFO Networkswith Unique O-D Paths is HardAlan L. Erera, Carlos F. Daganzo,David J. LovellThis paper is concerned with theperformance of multi-commoditycapacitated networks with con-tinuous flows in a deterministic buttime-dependent environment. It isshown that even if all input func-tions are smooth, there are in-stances of the problem with a fi-nite but possibly very large num-ber of solutions.UCB-ITS-PRR-99-35November 1999, 5 pages, $5
Advanced Coordinated TrafficResponsive Ramp MeteringStrategiesKlaus Bogenberger, Adolf D. MayIntroduces different ramp controlalgorithms, implemented or not
implemented, but based on prom-ising new mathematical tech-niques. 17 different approachesare described.UCB-ITS-PWP-99-19*November 1999, 54 pages, $15
Implementation of AdvancedTechniques for AutomatedFreeway Incident DetectionBaher Abdulhai, Stephen G. Ritchie,Mahadevan IyerThis project extended existingfreeway incident detection re-search conducted by both PATHand under the UC Irvine ATMSTestbed Research Program. Aprobabilistic neural network wasintegrated into the Testbed for on-line operation on the testbed net-work in Southern California. ThePNN was then started on-line on afive-mile section of Interstate 405for monitoring and testing.UCB-ITS-PRR-99-42*December 1999, 50 pages, $10
High Occupancy Vehicle/TollLanes: How Do They Operateand Where Do They MakeSense?Joy DahlgrenExamines the circumstances inwhich HOT lanes could provide amore desirable alternative to HOVlanes. In most cases modeled, aHOT lane results in substantiallyless delay than an HOV lane. It alsoperforms better or almost as wellas a mixed flow lane. In locationswhere tolling would be feasibleand where HOV lane utilization islow, HOTs might be a preferablealternative to the HOV lane.UCB-ITS-PWP-99-8*June 1999, 31 pages, $10
Simulation of ITS on the IrvineFOT Area Using Paramics 1.5Scalable Microscopic TrafficSimulator: Phase I: Model Cali-bration and ValidationBaher Abdulhai, Jiuh-Biing Sheu,Will ReckerPresents an attempt towards thecalibration, validation, and evalu-ation of Paramics 1.5, a micro-scopic traffic simulator designedfor modeling Intelligent Transpor-tation Systems (ITS) in SouthernCalifornia. The study also attemptsto compile a list of attributes thata successful traffic simulator shouldposses in order to model ITS.UCB-ITS-PRR-99-12*April 1999, 64 pages, $15
ATIS (Advanced Traveler Infor-mation Systems)
Evaluation of the OCTA TransitProbe SystemRandolph W. Hall, Nilesh Vyas,Chintan Shyani, Vikas Sabnani,Simit KhetaniThe Orange County Transit Au-thority (OCTA) Transit ProbeProject is a field operational test ofan automatic vehicle location sys-tem. This report provides a de-tailed description of the systemand the motivation for its design,analyses of data reliability and ac-curacy, and analysis of the useful-ness of transit probe data for pre-dicting automobile travel times.UCB-ITS-PRR-99-39November 1999, 119 pages, $20
Ventura/Lompoc Smart CardDemonstration Evaluation: FinalReport: Volume 1–TechnicalPerformance, User Response,and Institutional AnalysisGenevieve Giuliano, James E.Moore II, Jacqueline GolobPresents evaluation results of theSmart Card Phase III Field Demon-stration, the purpose of which wasto demonstrate the feasibility ofusing Smart Cards and other tech-nology to provide an integratedfare medium across several transitoperators. Despite deploymentproblems, participating agencieswere generally enthusiastic aboutthe technology, and ultimately itbecame a permanent part of tran-sit operations in the county.UCB-ITS-PRR-99-30August 1999, 267 pages, $35
Event-Based ATIS: PracticalImplementation and Evaluationof Optimized Strategies (Part I)R. Jayakrishnan, Wei K. Tsai,Jun-Seok Oh, Jeffrey AdlerThis research focuses on finding anoptimal routing scheme, using al-gorithms which focus on change-able message sign (CMS) routing.Static network optimization anddynamic stimulation approachesare used to find the optimal rout-ing scheme. A framework is cre-ated that is designed for use inevent-based congestion manage-ment.UCB-ITS-PWP-99-7June 1999, 61 pages, $15
Daily Activity and MultimodalTravel Planner: Phase II FinalReportRyuichi Kitamura, Cynthia Chen,Jiayu ChenThe goal is to develop an “Itiner-ary Planner” that attempts to iden-tify the most desirable itinerary,desirability being a weighted sumof seven criteria (i.e., total traveltime and monetary cost). It is dem-onstrated that the Planner is ca-pable of effectively generating al-ternative itineraries for a tour thatinvolves multiple trips and multiplemodes, with complex constraints,and that the Planner prototypeserves as a practical tool for travel-ers in itinerary planning.UCB-ITS-PRR-99-1*January 1999, 87 pages, $15
Evaluation of Caltrans District10 Automated Warning System(CAWS): Year Two ProgressReportArt MacCarleyDistrict 10 encompasses an area ofseasonal fog and dust-related vis-ibility problems that have causedmany fatal collisions. CAWS, whichincludes remote meteorologicalstations and changeable messagesigns, is currently being evaluatedby PATH. This report summarizesthe technological and operationalevaluations.UCB-ITS-PRR-99-28*August 1999, 79 pages, $15
Market for Traffic Information -A Study of Industry Structureand ProspectsShirley Chan, Matthew Malchow,Adib KanafaniExamines the structure and opera-tion of the traffic information in-dustry and the behavior of theindustry’s participants. Gives anoverview of the commercial trafficinformation services in the US, fol-lowed by an analysis of the natureof the traffic information industry.Investigates what kinds of enter-prise activities and arrangementswould best meet traveler needs,including the role of public agen-cies that are concerned with sys-tem management.UCB-ITS-PRR-99-17June 1999, 29 pages, $10
Some Aspects of the Market forBroadcast Traffic InformationMatthew Malchow, Adib KanafaniExamines the market for broadcast

27
traffic information in the US. Fo-cuses on supply and demandcurves representing the behaviorof information providers andbroadcast stations in determiningthe level of output to be con-sumed. Potential roles for publicinvolvement are investigatedbased on different scenarios andsituations.UCB-ITS-PWP-99-9June 1999, 18 pages, $5
APTS (Advanced Public Trans-portation Systems)
Spatial and Temporal Factors inEstimating the Potential ofRide-Sharing for Demand Re-ductionH.-S. Jacob Tsao, Da-Jie LinCan current population density,origin-destination distribution,pick-up and drop-off delays, de-parture time distribution, and de-viation from preferred departuretime support a sizable carpoolingpopulation that can reduce trafficdemand? Under the assumptionsmade in the paper, carpoolingamong unrelated partners (i. e.interhousehold carpooling) haslittle potential for demand reduc-tion.UCB-ITS-PRR-99-2*January 1999, 62 pages, $15
Bus Operations in Santa ClaraCounty, Potential Uses of AVL,and Framework for EvaluatingControl StrategiesT. Chira-Chavala, David Gillen,Lee Klieman, Amy MarshallThe Santa Clara (California) ValleyTransportation Authority (VTA), iscurrently installing automatic ve-hicle location (AVL) equipment onits bus fleet. This report presentsthe results of Phase 1 research,which examines the various perfor-mance and operational character-istics of the fixed-route bus systemwith an eye to identifying perfor-mance characteristics that couldbe improved utilizing AVL, (andwithout using it), transit, bus,schedule adherence, transfer coor-dination, control strategy, passen-ger waiting time, passenger infor-mation, transit information, tran-sit performance, automatic vehiclelocation, AVL.UCB-ITS-PRR-99-25*July 1999, 126 pages, $20
Towards an Accessible City:Removing Functional Barriersto Independent Travel for Blindand Vision Impaired Residentsand VisitorsReginald G. Golledge,James R. MarstonDescribes a study that examinedthe impact of Remote InfraredSignage Systems on the perfor-mance of blind or vision-impairedpeople in using buses. Auditorymessages were transmitted by theRemote Infrared Signage Systems.The value of the systems were seenin reduced anxiety and increasedconfidence levels for performingdifferent spatial tasks.UCB-ITS-PRR-99-33*September 1999, 34 pages, $10
Evaluation of ITS Technologyfor Bus Transit SystemsRandolph Hall, Maged Dessouky,Lei Zhang, Ajay Singh, Vishal PatelTransit service providers have re-cently begun to adopt ITS tech-nologies such as global positioningsystems (GPS) and mobile data ter-minals. We evaluate bus controlstrategies using ITS against thosewithout ITS. Results of a simulationanalysis show that ITS-based strat-egies have the potential to im-prove connectivity between ori-gins and destinations while reduc-ing passenger waiting times.UCB-ITS-PRR-99-38November 1999, 119 pages, $20
User’s Manual for Transit ITSSimulator (TRAN-ITS)Maged Dessouky, Lei Zhang,Ajay Singh, Randolph HallDescribes a simulation model thatwas used to evaluate the impact ofIntelligent Transportation Systems(ITS), such as Global PositioningSystem (GPS), on bus tracking andbus control in wide-area transitnetworks. Bus control strategiesusing ITS were evaluated againstthose without ITS.UCB-ITS-PWP-99-13September 1999, 34 pages, $10
Dynamics in Behavioral Adapta-tion to a Transportation Inno-vation: A Case Study ofCarLink–A Smart CarsharingSystemSusan A. ShaheenUses new survey research methodsto determine how the use of infor-mation and communication tech-
nologies can enhance flexibilityand mobility, and what value trav-elers will place on new transporta-tion methods. Integrates socialmarketing and learning theorieswith human activity analysis ap-proaches to explain these pro-cesses.UCB-ITS-PRR-99-41*December 1999, 469 pages, $50
Assessing Opportunities forIntelligent Transportation Sys-tems in California’s IntermodalOperations and Services – Re-view of LiteratureMark Miller, Camille TsaoThis literature review was per-formed to help develop a baselineknowledge of California’s currentpassenger intermodal services andoperations, to find methods forevaluating intermodal perfor-mance, and to assess how intelli-gent transportation systems havealready been applied to intermodalsystems in both the United Statesas well as internationally.Tech Note 99-1*August 1999, 17 pages, $10
Decision Support and Benefit/Cost Analysis
Evaluation of the Anaheim Ad-vanced Traffic Control SystemField Operational Test: FinalReport Task B; Assessment ofInstitutional IssuesM. G. McNally, James E. Moore, II, C.Arthur MacCarley, R. JayakrishnanSummarizes Task B of the threepart evaluation project. Institu-tional factors included inconsistentproject management due to staffchanges and delays due to con-tractual issues. Both SCOOT and amodified version of the VTDS arein current use in selected areas,with plans for system expansion.UCB-ITS-PRR-99-27July 1999, 114 pages, $20
Southern California IntelligentTransportation System PriorityCorridor Action SummaryThomas HoranDescribes short-term actionswhich are necessary for achievingthe recommendations set forth inthe previously issued StrategicGuide. The actions focus on: 1)emphasizing short-term deploy-ment of ITS transportation ser-
vices; 2) standards needed for en-hancing corridor transportationservices; and, 3) emphasizing theinstitutional arrangements neededto facilitate Corridor Network ITSdeploymentUCB-ITS-PWP-99-12September 1999, 28 pages, $10
PATH ATMIS State of the Re-search Annual Report Fiscal Year1998-1999Robert TamBrief project descriptions state theobjectives of the project and out-line its status and some of its prin-cipal results. Taken together, thecollection should give a reader anoverview of the entire program. Ingeneral we have described onlyprojects which are completed orhave produced specific results andreports.UCB-ITS-PWP-99-15,October 1999, 36 pages, $10
Evaluation Methodologies forITS ApplicationsDavid Gillen, Jianling LiPresents a framework for conduct-ing benefit-cost analyses of Intelli-gent Transportation Systems (ITS)projects. For each benefit-costanalysis, impact analysis, and costeffectiveness analysis, the authorsdiscuss the orientation, scope,strength and weakness, decisioncriteria, and basis of evaluation.The quantity of benefits and howthey can be measured, calculated,or forecast are then described.UCB-ITS-PWP-99-2February 1999, 145 pages, $25
Decision-Oriented Frameworkfor Evaluating DeploymentStrategies for Intelligent Trans-portation SystemsH.-S. Jacob TsaoDeployment issues may limit de-sign options for ITS concepts andtechnologies and, hence, can beviewed as constraints on ITS re-search and development. This pa-per develops a framework to helprecognize and organize such is-sues. The findings can be used indeveloping deployable ITS con-cepts and technologies, and in de-ploying ITS technologies alreadydeveloped.UCB-ITS-PRR-99-4*February 1999, 41 pages, $10

28
Identification and Prioritizationof Environmentally BeneficialIntelligent Transportation Tech-nologies: Modeling EffortTroy Young, Daniel Sperling,Susan ShaheenObjectives were to review previousenvironmental assessments of ITS,review regulatory and policy con-texts encompassing ITS, develop amodeling framework suitable forassessing short-term impacts ofITS, identify ITS technologies withpositive environmental effects, andranked those technologies accord-ing to their energy and emissionbenefits.UCB-ITS-PWP-99-20*December 1999, 26 pages, $10
California System ArchitectureStudy: Architecture for Action:A Strategy for Facilitating Near-Term DeploymentThomas A. Horan, Lawrence JesseGlazer, Christopher Hoene,Randolph Hall, Christopher Intihar,Ronald IceIdentifies challenges to ITS deploy-ment in California and offers recom-mendations for overcoming them.Analysis is based upon an extensiveliterature review, interviews, and fo-cus groups conducted with over sev-enty-five transportation profession-als from around the State. We rec-ommend a decentralized, evolution-ary strategy we call “Architecture forAction” – decentralized through anemphasis on increased regional andlocal authority, evolutionary in itsfocus on developing the architecturearound near-term deployment.UCB-ITS-PRR-99-3*February 1999, 173 pages, $25
Assessing the Benefits and Costsof Intelligent Transportation Sys-tems: Ramp MetersSeungmin Kang, David GillenThe impact of ramp metering ontraffic behavior is simulated basedon a cell transmission model andan assumed travel demand on thefreeway as well as the ramp. Tem-poral travel demand change is de-termined based on the averagetravel pattern obtained from the I-880 freeway database. We identifyand quantify the benefits and costsbased on established assumptions,and analyze the economic value oframp metering.UCB-ITS-PRR-99-19*July 1999, 51 pages, $15
Assessing the Benefits andCosts of Intelligent Transporta-tion Systems: The Value of Ad-vanced Traveler InformationSystemsDavid Levinson, David Gillen,Elva ChangITS technology such as in-vehiclenavigation systems can reducetravel time and vehicle operatingcosts, but at a social cost, e. g., in-creased demand for travel. Afterreviewing the literature on infor-mation and travel behavior and onthe value of time, this paper ex-plores the effects of systems froma theoretical economic perspectiveand then simulates stylized casesUCB-ITS-PRR-99-20*July 1999, 67 pages, $15
Assessing the Benefits andCosts of ITS Projects: Volume 1–MethodologyDavid Gillen, Jianling Li,Joy Dahlgren, Elva ChangA framework for evaluating ITSprojects is developed. We reachtwo fundamental conclusions:first, agencies need to put in placean information system that is ori-ented to the collection of morebusiness and economic data to es-tablish a database for evaluatingfuture ITS projects. Second, therewould be great value in estimat-ing some well constructed de-mand models associated with ITStransportation projects.UCB-ITS-PRR-99-9*March 1999, 30 pages, $10
Assessing the Benefits andCosts of ITS Projects: Volume 2–Application to Electronic TollCollectionDavid Gillen, Jianling Li,Joy Dahlgren, Elva ChangCost estimation is relatively easy,but benefit estimations require so-phisticated assumptions and mod-eling techniques, since differentassumptions and modeling tech-niques will result in different inputsfor calculation of benefits. ITSproject evaluators should be fullyaware of these limitations There isan urgent need to collect datafrom ITS deployments and devel-oping models that can be used toaccurately predict demands andbenefits of ITS applications.UCB-ITS-PRR-99-10*March 1999, 97 pages, $15
AVCSS/AHS(Advanced Vehicle Control andSafety Systems / AutomatedHighway Systems)
Vehicle Control Experimentsand Field Tests
Design of a Controller for aFollowing Vehicle in anEmergency Lane ChangeManeuverD. Swaroop, Seok Min YoonA lane change maneuver is one ofthe many appropriate responses toan emergency situation. This paperconsiders the design of anintegrated lateral and longitudinalcontroller that enables a followingvehicle to track the lead vehicle’strajectory, while maintaining adesired following distance. Asliding mode controller is de-veloped for this purpose and itsperformance is demonstrated insimulations.UCB-ITS-PWP-99-3*February 1999, 16 pages, $5
Intelligent Cruise ControlSystem Design Based on aTraffic Flow SpecificationD. Swaroop, R. HuandraAn Intelligent Cruise Control (ICC)algorithm, if implemented by everyvehicle in the traffic, must guaran-tee that density disturbancesattenuate as they propagateupstream. Such a property isdependent on the spacing policyemployed by automated vehicles.Part I investigates the design of aspacing policy: Part II is concernedwith synthesizing an ICC algorithmfor automated vehicles.UCB-ITS-PRR-99-5*February 1999, 25 pages, $5
Fault Diagnosis andManagement
Diagnosis and Communicationin Distributed SystemsRaja SenguptaExamines diagnosis and communi-cation problems in distributedsystems within the context of alanguage-theoretic discrete eventformalism. Distributed systems areexamined and plant properties asthey relate to diagnosis are derived.Findings from this study can be
applied to the diagnosis of failuresin a wireless local area network(LAN) that is used to support thereal-time operation of automatedvehicles.UCB-ITS-PRR-99-16May 1999, 18 pages, $5
Fault Diagnosis for Intra-Platoon CommunicationsHidayet Tunc Simsek, RajaSengupta, Sergio Yovine, FarokhEskafiPresents the design and logicalverification of a fault diagnosis andmonitoring system for intra-platoon communication systems.The second part presents a generalframework for the simulation,verification, and implementation ofreal time control algorithms forintelligent vehicles and highways.UCB-ITS-PRR-99-24*July 1999, 49 pages, $10
AHS Safety Analysis andSimulation
Models of Vehicular Collision:Development and Simulationwith Emphasis on Safety V:MEDUSA: Theory, Examples,User’s Manual, Programmer’sGuide and CodeOliver M. O’Reilly, PanayiotisPapadopoulos, Gwo-Jeng Lo, PeterC. VaradiMEDUSA can simulate both thenormative driving dynamics andcollision dynamics of an arbitrarynumber of vehicles. This reportpresents the vehicle and roadmodels, including tire, collision,suspension, and sprung massmodels. Also contains thesimulation results of severalrepresentative vehicular collisionscenarios.UCB-ITS-PRR-99-32*August 1999, 124 pages, $20
Simulation and Animation Toolsfor Analysis of Vehicle Collision:SMAC (Simulation Model ofAutomobile Collisions) andCarmma (SimulationAnimations)Bruce Hongola, Ching-Yao ChanDescribes the functional capabi-lities of computer programs. SMAChas been used extensively in recentwork at PATH to investigate theconsequences of vehicle collisions

29
and the effects of vehicle-followingparameters on collisions. Carmmacan animate simulations. Thisdocument constitutes a simple yetthorough manual for the researchtools developed for the subjectmatter.UCB-ITS-PWP-99-10*July 1999, 9 pages,$5
Studies of Vehicle Collisions -A Documentation of the Simu-lation Codes: SMAC (SimulationModel of Automobile Colli-sions) Update 1Ching-Yao ChanFocuses on vehicle collisions invehicle-following operations.Contains documentation for thecomputer program (SMAC), thecore element of simulation tools forvehicle collision dynamics. Thestructure of the program is outlinedwith descriptions of the majorsubroutines. Added options forimplementing user-specified steer-ing inputs and feedback controllersare explained.UCB-ITS-PWP-99-4*March 1999, 10 pages, $5
Safety and Capacity Analysis ofAutomated and Manual High-way SystemsJason Carbaugh, Datta N.Godbole, Raja SenguptaCompares safety of automated andmanual systems with respect toresulting rear-end collision frequen-cy and severity. Results show thatautomated driving is safer than themost alert manual drivers, at similarspeeds and capacities.UCB-ITS-PRR-99-36*November 1999, 33 pages, $10
Communication Systems
Address Resolution in One LaneAutomated Highway SystemsSoheila V. Bana and Pravin VaraiyaAddress Resolution Protocols (ARP)are used in Automated HighwaySystem inter-vehicle communi-cation to determine the networkaddress of neighboring vehicles.We are proposing an innovativesolution that takes advantage ofthe automated road infrastructurefor providing addresses initially andthen uses the communicationnetwork itself for updating thenetwork communication addresses
in a one lane automated highwaysystem.UCB-ITS-PRR-99-22*July 1999, 35 pages, $10
Position Location in AHS byMagnetic Pseudo-Noise SignalsSoheila V. Bana and Pravin VaraiyaThis research proposes a novelmethod for position location byautomated vehicles, similar to GPSin the sense of using pseudo-noisecodes for range measurement. Thephase of a pseudo-noise signal canbe mapped to the receiver’s rangefrom a reference point where thesignal correlation properties insureaccurate phase estimation. Themagnetic markers that are installedon the road for vehicles’ lateralcontrol are proposed as themedium to carry the signal.UCB-ITS-PRR-99-21*July 1999, 21 pages,$5
Simple Results on Communica-tion With NeighborsAnuj Puri and Pravin VaraiyaIn this research we consider thequestion of whether it is possibleto build an address findingprotocol that uses only suchinformation as intervehicle dis-tances. We prove that no suchprotocol can exist. A proposedprotocol that uses the absolutelocation of vehicles may beconsidered to be information-wiseoptimal.UCB-ITS-PRR-99-23*July 1999, 6 pages, $5
Network Layer for IntelligentVehicle Highway SystemsFarokh Eskafi, Marco ZandonadiIn this research we describe thenetwork layer of a communicationstack to be used in AutomatedHighway Systems (AHS). Thecommunication model we proposeallows cars to form private subnets.Each car can be part of multiplesubnets and can send broadcast,multicast and point-to-pointmessages to other vehicles. Eachsubnet is managed by a server: acar that is in charge of accepting/rejecting join requests and ofkeeping a consistent state withinthe subnet.UCB-ITS-PWP-99-11*July 1999, 10 pages, $5
Aerodynamics
Transient Aerodynamic Effectson a Four-Car Platoon DuringPassing Maneuvers: DataSummaryL. Tsuei, J. K. Hedrick, Ö. SavasWe examined transient aerody-namic effects experienced by aplatoon when a single car passesby. Wind tunnel experiments wereconducted. Four factors wereinvestigated: mobile model’s di-rection; relative velocities betweenthe mobile model and the platoon;lateral spacings between themobile model and the platoon;and, the shapes of the mobilemodel.UCB-ITS-PRR-99-29August 1999, 118 pages, $20
Collision Avoidance Analysis forLane Changing and MergingHossein Jula, Elias B.Kosmatopoulos, Petros A. IoannouWe calculate the minimumlongitudinal spacing that vehi-cles performing a particular lanechange/merge scenario shouldinitially have so that no collisiontakes place during the maneuver.Simulations of a number ofexamples of lane changing ma-neuvers are used in order todemonstrate the results. Sensorsand equipment on board vehiclescould use our results to assess thesafety of lane changing ma-neuvers and warn drivers ofimminent collisions, or takeevasive actions.UCB-ITS-PRR-99-13*
May 1999, 45 pages, $10
AVCSS Concepts
Analysis of Traffic Flow withMixed Manual and Semi-automated VehiclesArnab Bose, Petros IoannouAnalyzes the effects on traffic flowcharacteristics and environmentwhen semi-automated vehicleswith automatic vehicle followingcapability operate in the same lanewith manually driven vehicles.Demonstrates the beneficial effectof semi-automated vehicles inmixed traffic in improving airquality and fuel consumption. Dueto the randomness and uncertain-ties of human driving, the numbers
obtained are valid qualitatively.UCB-ITS-PRR-99-14*May 1999, 46 pages, $10
Other pre 1999 projects
Validation of the IncrementalTransfer ModelTim Lawson, Wei-Hua Lin, MichaelCassidyThe authors validate an Incre-mental Transfer (IT) model, amacroscopic traffic flow model thatis capable of handling freewaysystems with special lanes andpriority vehicles. The modelpredicts separate versus coalescedqueues that result from capacityreduction on the exit ramp. Thefocus of the validation is to ex-amine the extent to which thequeuing pattern observed in thefield is captured by the model.UCB-ITS-PWP-99-16October 1999, 72 pages, $10
Development of BinocularStereopsis for Vehicle LateralControl, Longitudinal Controland Obstacle DetectionJitendra Malik, Jana Kosecka,Camillo J. Taylor, PhilipMcLauchlanDescribes the application ofcomputer vision techniques to thecontrol of an autonomous highwayvehicle. Focuses on various feed-back strategies where measure-ments obtained from vision atsome look-ahead distance are useddirectly for control. Also presentsinitial results comparing the qualityof vision range measurements witha scanning laser radar sensorsystem.UCB-ITS-PRR-99-37*November 1999, 33 pages, $10
Parametric Study of PlatoonDynamics and Robust H∞Controller DesignPahngroc Oh, Andy Packard,Benson H. TongueA comprehensive simulationcapability is presented for theanalysis of platoons. A separatecollision module is integratedwithin the platoon simulationpackage to allow the recognitionand dynamic simulation of intra-platoon collisions. An alternativecontrol strategy, one based on H∞optimization, is described.UCB-ITS-PRR-99-40November 1999, 54 pages, $15

30
General Framework forVerification, Simulation andImplementation of Real TimeControl AlgorithmsFarokh H. EskafiPresents a framework for themodeling, design, simulation,verification, and prototyping oflarge scale systems. The frameworkuses a set of tools that model thesystem, analyze, verify, andsimulate a control design, andgenerate a code that can be run ina target real-time software plat-form. The QNX real-time operatingsystem, which is currently in use inthe California PATH program inautomated vehicles, is used as thetarget platform for the generatedcode.UCB-ITS-PRR-99-15*May 1999, 19 pages, $5
Regulation Layer SoftwareIntegrationAkash R. DeshpandeThis research develops PATH vehiclecontrol technology into a secondgeneration by refining andrestructuring it to meet the futuredemand on regulation layerfunctionality. This developmentcombines experience with formalmethods-based approaches for thedesign and implementation of real-time control systems. Our workintroduces benefits such as tightersystem integration, event-orientedsystem behavior, and fault manage-ment capabilities.UCB-ITS-PRR-99-34
November 1999, 95 pages, $20

31
PUBLICATIONS NO. TITLE PRICE
UCB-ITS-
UCB-ITS-
UCB-ITS-
UCB-ITS-
PLEASE SHIP THE ITEMS LISTED BELOW TO:
NAME _____________________________________________________________________________
ADDRESS __________________________________________________________________________
___________________________________________________________________________________
___________________________________________________________________________________
PHONE ____________________________________________________________________________
California PATH Publications Order Form
Sales Tax—California residents 7.25%; residents of Alameda, Contra Costa, and Santa Clara counties 8.25%;residents of San Francisco and San Mateo counties, 8.5%.
Surface Mail—Orders are sent 4th-class book rate. Add $3 to publication price when ordering one item, $6for 2-4 items, $12 for 5-7 items, $20 for 8-10 items, $25 for 11-15 items, and $35 for more than 15 items. Pleaseallow two weeks for domestic delivery. For international delivery, please allow two to three months.
Air Mail—For faster international delivery, please specify Air Mail and add $10 for the first item and $5 for eachadditional item. Prepayment required in US funds. Please allow approximately 10 days for delivery.
Federal Express—Orders can be sent by Federal Express for customers who have a Federal Express number towhich we can charge the shipment. When requesting delivery by Federal Express, please enclose a Fed Ex shippingform to be used in sending your order.
If you need further information, please visit our Web Site (http://www.its.berkeley.edu/publications.html) orcall (510) 642-3558.
FAX
PREPAYMENT REQUIRED: PLEASE MAKE CHECK OR MONEY ORDER PAYABLE TO“REGENTS, UNIVERSITY OF CALIFORNIA”. SORRY, WE CANNOT ACCEPT CREDITCARD PAYMENT.
MAIL ORDERS TO: ITS SALES PUBLICATIONS109 MCLAUGHLIN HALLUNIVERSITY OF CALIFORNIABERKELEY, CA 94720
FAX: 510-642-1246
SUBTOTAL
SURFACE MAIL
AIRMAIL
TOTAL
SALES TAX(CA RESIDENTS ONLY)

32

33
PATH Database
The California PATH Database provides access to the largest and most comprehen-sive collection of bibliographic information on Intelligent Transportation Systems(ITS). The Database is now accessible on the Internet through a partnership betweenthe California PATH Program and the Transportation Research Board.
The Database, created in 1989, is sponsored by Caltrans and the Federal HighwayAdministration. It is maintained by the Harmer E. Davis Transportation Library (HEDTL)at the Institute of Transportation Studies, University of California at Berkeley. Theweb site is administered by the Transportation Research Board and is updatedmonthly.
Scope and CoverageThe Database contains references to all aspects of Intelligent Transportation Systems,ranging from historical materials dating back to the 1940s to topics of current andinternational research and applications. It reflects a wide coverage of information onITS, including monographs, journal articles, conference papers, technical reports,theses, web sites, and selected media coverage. Currently, there are nearly 20,000records with abstracts contained in the Database. Full bibliographic information isprovided, and URLs are included for documents that are available in electronic for-mat. The majority of the indexed items are held at the Harmer E. Davis Library.
Access and AvailabilityTo access the California PATH Bibliographic Database, go to:http://www4.nationalacademies.org/trb/tris.nsf/web/path
To access the Harmer E. Davis Library web site, go to:http://www.lib.berkeley.edu/ITSL
The “New Acquisitions in Intelligent Transportation at the Harmer E. Davis Transpor-tation Library” list is a compilation of records that have been added to the Databasein the previous month. To access the New Acquisitions list, go to:http://library.berkeley.edu/ITSL/newbooks.html
For information regarding the availability of documents held at other University ofCalifornia at Berkeley libraries, go to:http://www.lib.berkeley.edu/ILS/nonuc.html
Loans and photocopies of materials are available to persons affiliated with the Uni-versity of California and California PATH sponsors. For others, information on inter-library loans or photocopies may be obtained at the HEDTL web site. Questionsregarding the Database may be directed to:Seyem Petrites, PATH Database Manager at:[email protected] Kleiber, PATH Database Librarian at:[email protected]

34
California PATHAdministrative HeadquartersUniversity of California, BerkeleyInstitute of Transportation StudiesRichmond Field Station, Building 4521357 S. 46th StreetRichmond, CA 94804-4603
tel. 510/231-9495fax 510/231-9565
http://www.path.berkeley.edu

![The Influence of Spreading Metal Powders with Different ... · The relationship between the PSD and the apparent density (AD) for copper-based Zhu et al. [7]. They increased the relative](https://img.pdfslide.us/doc/110x75/6026c0e47281a936b44a9b30/the-influence-of-spreading-metal-powders-with-different-the-relationship-between.jpg)