-
8/2/2019 Calculation of C With Rayleighs Model
1/37
Dynamic Analysis with Damping for Free Standing Structures
usingMechanical Event Simulation
I Giosan*
Key Words: Dynamic Analysis, Damping, Numerical Simulation, Free
StandingStructures
This Paper presents a modern, new approach, which accounts for
damping, in designingfree standing structures that are subject to
dynamic induced loads.The procedures outlined in this paper involve
the most advanced engineering simulationconcept Mechanical Event
Simulation to investigate, analyze, and optimize verycomplex
geometries that are usually the most critical areas for free
standing structures.The new design approach proposed in this paper
places the system in direct contact withthe surrounding environment
and calculates the loads based on this interaction.Using this
method the engineer no longer has to approximate the loads and to
apply themstatically. The simulated interaction will be a realistic
one triggering the fatigue sourceswhich are the cyclic loads.
Introduction.
One of the most amazing achievements in engineering is the
practical application of Numerical Simulation.
Leibnitzs dream [1] , almost three centuries ago, of developing
a generally applicablemethod that could arrive at a solution to a
differential equation of any type became
possible in our time with revolutionary discoveries in the
computer and computingdomains.Practically, numerical simulation has
been applied successfully for more than 50 years inthe main
engineering disciplines.Today, the market offers a large variety of
general purpose numerical simulationsoftware, which in the hands of
a well trained engineer can become an extremely
powerful engineering tool.The latest developments in computing
technology have made it possible to simulate theworld around us, as
it really is in a nonlinear fashion.The Mechanical Event Simulation
(MES) [2] concept introduced and developed byALGOR Inc. 1
represents a paradigm shift in engineering design. It allows
engineers anddesigners to simulate the actual conditions that a
mechanical component will experience;that is, the event associated
with its application. This is possible because MES accounts for
both the interaction of the component with itssurroundings, and the
inertial forces generated by the motion of the component itself.To
simulate the nonlinear behavior of the (surrounding) real world one
of the mostcritical parameters the analyst must account for is the
damping coefficient.
* Senior Design Engineer, West Coast Engineering Group Ltd.,
Vancouver, Canada.1 Algor Inc. Pittsburg located, advanced Finite
Element Method software developer.
-
8/2/2019 Calculation of C With Rayleighs Model
2/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
2
Characterization of damping forces in a vibrating structure has
long been an active areaof research in structural dynamics. In
spite of significant research, thoroughunderstanding of damping
mechanism is not well developed. A major reason for this isthe
state variables that govern damping forces are generally not clear,
unlike the case for inertia and stiffness forces. There is advanced
research results to identify a general model
of damping [3] or the estimation of damping in a random
vibrating system [4]. The most common approach is to use viscous
damping or Rayleigh damping where it isassumed that the damping
matrix is proportional to the mass [ M] and stiffness matrices[K],
or:
[ ] [ ] [ ] K M C +=
For large systems, identification of valid damping coefficients
and , for all significantmodes is a very complicated task.This
paper presents the theoretical basis of event simulation together
with a methodologyto incorporate damping for free standing systems
with a large degrees of freedom,
including transmission line towers, wind mill, and antenna or
high Mast towers.
1. General Derivation of Mechanical Event Simulation Equilibrium
Equations.
Event simulation as an engineering methodology is vastly
different from the techniquesthat have been taught to engineers
since the onset of formal engineering training,
beginning with the Greek Mathematician Archimedes, around 200
BC. Event simulationis the process of engineering, by simulating a
physical event in a virtual laboratory. To
perform an engineering analysis using event simulation, a
different viewpoint from thatof classical stress analysis is
required.
Hooke's law which states that force is a linear function of
displacement forms the basis of classical stress analysis and thus,
of modern finite element stress analysis.In finite element
analysis, the matrix equation {F} = [K]{U} is solved for
thedisplacement vector, {U}, from the force vector, {F}, and the
stiffness matrix, [K]. Subsequently, the stresses are calculated
from the equation { }= E{ }, where { } is thestrain vector, which
is a normalized displacement vector. E is Young's modulus
thatcorresponds to Hooke's constant, k .This method works well if
the analyzed system is always at rest. However, in
practicalmechanical or structural engineering the static case would
never dictate the design. Thedesign must consider the "worst case
scenario" which generally occurs when the systemis in motion, when
the forces and thus the stresses are greater than those under
static
conditions.This is where virtual engineering enters the design
process: it allows us to simulate theentire event, not simply
obtain a static solution. A useful by-product of simulating
theevent is the forces generated by motion.
The theory behind Mechanical Event Simulation is based on the
general finite elementequilibrium equations clearly presented in
1982 by Bathe [5] .
-
8/2/2019 Calculation of C With Rayleighs Model
3/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
3
Later on, Weaver and Timoshenko [6] , Inman [7] and Hutton [8]
had major contributionsin modeling, and incorporating the damping
into the free vibration mathematical models.The derivation of MES
equations will be presented further on.
In fig. 1.1 a general three-dimensional body is shown in
equilibrium, under external
surface forces f S
, body forces f B
and concentrated forces F i
.These forces include all externally applied forces and
reactions and have threecomponents corresponding to the three
coordinate axes:
;;;
=
=
=i
z
i y
i x
i
S z
S y
S x
S
B z
B y
B x
B
F F F
F f f f
f f f f
f (1.1)
Figure 1.1 General three -dimensional body.
The displacements of the body from the unloaded configuration
are denoted by U , where
[ ]W V U U T = (1.2)
-
8/2/2019 Calculation of C With Rayleighs Model
4/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
4
The strains corresponding to U are,
zz yy xx zz yy xxT = (1.3)
And the stresses corresponding to are,
zx yz xy zz yy xxT = (1.4)
To express the equilibrium of a body the principle of virtual
displacement will be used.This principle states that equilibrium of
a body requires that for any compatible, smallvirtual displacements
imposed onto the body, the total internal virtual work is equal to
thetotal external virtual work:
++=i
iT iS
V
T S B
V
T
V
T F U dS f U dV f U dV (1.5)
The left term is the internal virtual work and is equal to the
actual stresses goingthrough the virtual strains (that correspond
to the imposed virtual displacements),
= zz yz xx zz yy xx
T (1.6)
The external work is equal to the actual forces f S , f B and F
i going through the virtualdisplacement U , where
= W V U U T (1.7)
The superscript S denotes that surface displacements are
considered and superscript idenotes displacements at the point
where concentrated forces F i are applied.It should be emphasized
that the virtual strains used in (1.5) are those corresponding
to
the imposed body and surface virtual displacements, and that
these displacements can beany compatible set of displacements that
satisfy the geometric boundary conditions. Theequation (1.5) is an
expression of equilibrium, and for different virtual
displacements,correspondingly different equations of equilibrium
are obtained. However, equation (1.5)also contains the
compatibility and constitutive requirements if the principle is
used in theappropriate manner; namely, the considered displacements
should be continuous andcompatible and should satisfy the
displacement boundary conditions, and the stressesshould be
evaluated from the strains using the appropriate constitutive
relations. Thus, the
principle of virtual displacements embodies all requirements
that need be fulfilled in theanalysis of a problem in solid and
structural mechanics. Finally, it can be noted thatalthough the
virtual work equation has been written in (1.5) in the global
coordinatesystem X , Y , Z of the body, it is equally valid in any
other system of coordinates.
-
8/2/2019 Calculation of C With Rayleighs Model
5/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
5
Now, it will be detailed how the principle of virtual
displacements is used effectively, asa mechanism to generate finite
element equations that govern the response of a structureor
continuum. Response of the general three-dimensional body shown in
Fig.1.1 will beconsidered.In the finite element analysis we
approximate the body in Fig.1.1 as an assemblage of
discreet finite elements, with the elements being interconnected
at nodal points on theelement boundaries. The displacements
measured in a local coordinate system x, y, z within each finite
element are assumed to be a function of the displacements at the
Nfinite element nodal points. Therefore, for element m we have
( )( ) ( )( )U z y x H z y xu mm)
,,,, = (1.8)
where H (m) is the displacement interpolation matrix, the
superscript m denotes element mand is a vector of the three global
displacement components U i, V i, and W i at all nodal
points, including those at the supports of the element
assemblage.
[ ] N N N T W V U W V U W V U U ,,...,,,, 222111= )
(1.9a)
More generally, relation (1.9a) can be written as
[ ] N T U U U U ...21= )
(1.9b)It is understood that U i may correspond to a displacement
in any direction which may not
be aligned with a global coordinate axis, and U i may also
signify a rotation when beams, plates or shell finite elements are
considered.
Although all nodal point displacements are listed in , it should
be realized that for agiven element, only the displacements at the
nodes of the element affect the displacementand strain distribution
within the element. With the assumption on the displacements
in(1.8) the corresponding element strains can be evaluated,
( )( ) ( )( )U z y x B z y x mm)
,,,, = (1.10)where B(m) is the strain-displacement matrix and
the rows of B(m) are obtained byappropriately differentiating and
combining rows of the matrix H (m).The purpose of defining the
element displacements and strains in terms of the completearray of
finite element assemblage nodal point displacements is to automate
theassemblage process of the element matrices to the structure
matrices, using (1.8) and
(1.10).The stresses in a finite element are related to the
element strains and the initial stresses,using
( ) ( ) ( ) ( )m I mmm C += (1.11)
-
8/2/2019 Calculation of C With Rayleighs Model
6/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
6
where C (m) is the elasticity matrix of element m and I(m) are
the element initial stresses.The material law specified in C (m)
for each element can be that of an isotropic or anisotropic
material and can vary from element to element.Using the assumption
on the displacements within each finite element as expressed
in(1.8), equilibrium equations that correspond to the nodal point
displacements of the
assemblage of the finite elements can be derived. First, (1.5)
will be rewritten as a sumof integrations over the volume and areas
of all finite elements,
( )
( )
( ) ( ) ( )
( )
( ) ( )
( )
( )
( ) ( )
++
=
i
iT i
m
mmS
S
T mS
m
mm B
V
T m B
m
mm
V
T m
F U dS f U
dV f U dV
m
mm
(1.12)
where m=1,2,, k and k =number of elements. It is important to
note the integrations in(1.12) are performed over the element
volumes and surfaces.If substituted in (1.12) for the element
displacements (1.8), strain (1.10), and stresses(1.11), the
following will be obtained.
( )( )
( ) ( ) ( )
( )( )
( ) ( )
( )( )
( ) ( )
( )( )
( ) ( )
+
+
+
=
F dV B
dS f H
dV f H
U U dV BC BU
m
mm I
V
m
m
mmS
S
mS
m
mm B
V
m B
T
m
mmm
V
mT
m
T
m
T
m
T
m
T
) ) )
(1.13)
Surface displacement interpolation matrices H S(m) are obtained
from the volumedisplacement interpolation matrices H (m) in (1.8)
by substituting the element surfacecoordinates, and F is a vector
of the externally applied forces to the nodes of the
elementassemblage.To obtain from (1.13) the equations for the
unknown nodal point displacements, thevirtual displacement theorem
will be invoked by imposing unit virtual displacements inturn at
all displacement components. In this way we have
I U T = )
( I =identity matrix), and denoting the nodal point
displacements by U , i.e. letting U ,from this point on, the
equilibrium equations of the element assemblage corresponding tothe
nodal point displacements are
R KU = (1.14)where
-
8/2/2019 Calculation of C With Rayleighs Model
7/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
7
C I S B R R R R R ++= (1.15)The matrix K is the stiffness matrix
of the element assemblage,
( )( )
( ) ( ) ( ) ( ) ==m
m
m
mmm
V
m K dV BC B K m
T (1.16)
The load vector R includes the effect of the element body
forces,
( )( )
( ) ( ) ( ) ==m
m B
m
mm B
V
m B RdV f H R
m
T (1.17)
the effect of the element surface forces,
( )( )
( ) ( ) ( ) ==m
mS
m
mmS
S
mS S RdS f H R
m
T
(1.18)
the effect of the element initial stresses,
( )( )
( ) ( ) ( ) ==m
m I
m
mm I
V
m I RdV B R
m
T (1.19)
and the concentrated load,
F RC = (1.20)It can be noted that the summation of the element
volume integrals in (1.16) expresses thedirect addition of the
element stiffness matrices K (m) to obtain the stiffness matrix of
thetotal element assemblage. In the same way, the assemblage body
forces vector R B iscalculated by directly adding the element body
force vectors R B(m); and similarly RS , R I ,and RC are obtained.
Therefore, the formulation of the equilibrium equations in
(1.14)carried out above includes the assemblage process to obtain
the structure matrices fromthe element matrices, usually referred
to as the direct stiffness method.Equation (1.14) is a statement of
the static equilibrium of the element assemblage. Inthese
equilibrium considerations, the applied forces may vary with time,
in which casethe displacements also vary with time and (1.14) is a
statement of equilibrium for anyspecific point in time. However, if
the loads are applied rapidly, inertia forces must beconsidered.
Using dAlamberts principle, the element inertia forces can be
simplyincluded as part of the body forces. Assuming the element
accelerations are approximatedin the same way as the element
displacements in (1.8), the contribution from the total
body forces to the load vector R is
( )
( )
( ) ( ) ( ) ( ) ( ) =
=m
m B
m
mmmm BT
V
m B RdV U H f H R
m
&& (1.21)
where f B(m) no longer includes inertia forces, lists the nodal
point accelerations and (m) is the mass density of element m. The
equilibrium equations are, in this case,
-
8/2/2019 Calculation of C With Rayleighs Model
8/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
8
R KU U M =+&& (1.22)
where Rand U are time dependent. The matrix M is the mass matrix
of the structure,
( ) ( ) ( )
( )
( ) ( ) ==m
m
m
m
V
mmm M dV H H M m
T (1.23)
In actual measured dynamic response of structures it is observed
that energy is dissipatedthrough vibration, which in vibration
analysis is usually taken into account byintroducing
velocity-dependent damping forces. Introducing the damping forces
asadditional contributions to the body forces is obtained in
(1.21),
( )
( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) =
=m
m B
m
mmmmmm BT
V
m B RdV U H k U H f H R
m
&&& (1.24)
Where is a vector of the nodal point velocities, and k (m) is
the damping property parameter of element m.The equilibrium
equations are, in this case,
R KU U C U M =++ &&& (1.25)
where C is the damping matrix of the structure,
( ) ( ) ( )( )
( ) ( ) ==m
m
m
m
V
mmm C dV H H k C m
T (1.26)
In practice it is difficult if not impossible to determine for
general finite elementassemblages the element damping parameters,
in particular because the damping
properties are frequency dependent. For this reason, the matrix
C is in general notassembled from element damping matrices.
Instead, it is constructed using the massmatrix and stiffness
matrix of the complete element assemblage together withexperimental
results on the amount of damping.
Equation (1.25) is the basic equation of virtual engineering;
note how it models thecombination of motion, damping and mechanical
deformation. If the stresses are still of interest, they can be
calculated at any time during the analysis by application of
theformula { } = E{ }, where { } (the strain vector) is easily
obtained from the displacementvector { U }.
2. Change of Basis to Modal Generalized Displacements.
In order to transform the equilibrium equations into a more
effective form for directintegration the following transformation
on the finite element nodal point displacementsU , will be used
-
8/2/2019 Calculation of C With Rayleighs Model
9/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
9
( ) ( )t t PX U = (2.1)
Where P is a square matrix and X(t) is a time-dependent vector
of order n. Thetransformation matrix P is still unknown and will
have to be determined. The componentsof X are referred to as
generalized displacements. Substituting (2.1) into (1.25) and
pre-multiplying by P T , we obtain
( ) ( ) ( ) ( )t t t t R X K X C X M ~~~~ =++
&&&
(2.2)
Where:
=
==
=
R P R
KP P K
CP P C
MP P M
T
T
T
T
~
~
~
~
(2.3)
The above transformation is obtained by substituting (2.1) into
(1.8) to express theelement displacements in terms of the
generalized displacements,
( )( ) ( ) ( )t mm PX H t z y xu =,,, (2.4)
and then using (2.4) in the virtual work equation (1.12).The
objective of the transformation is to obtain new system stiffness,
mass, and dampingmatrices, K , M , and C , which have a smaller
bandwidth than the original system matrices,and the transformation
matrix P should be selected accordingly. In addition, it should
benoted that P must be non-singular (i.e., the rank of P must be n)
in order to have a uniquerelation between any vectors U and X as
expressed in (2.1)Theoretically, there can be many different
transformation matrices P , which wouldreduce the bandwidth of the
system matrices. However in practice, an effectivetransformation
matrix is established using the displacement solutions of the free
vibrationequilibrium equations with damping neglected,
0=+ KU U M && (2.5)With solution having the form
( )0sin t t U = (2.6)
Where is a vector of order n, t the time variable, t 0 a time
constant, and a constantidentified to represent the frequency of
vibration (rad/sec) of the vector .
-
8/2/2019 Calculation of C With Rayleighs Model
10/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
10
Substituting (2.6) into (2.5) will be obtained the generalized
eigenproblem, from which and must be determined,
M K 2= (2.7)
The eigenproblem in (2.7) yields n eigensolutions ( 12 , 1 ), (
22 , 2 ),( n2 , n ), wherethe eigenvectors are M -orthonormalized;
i.e.,
===
ji ji
M jT i ;0
;1 (2.8)
and
223
22
21 ...0 n (2.9)
The vector i is called the ith-mode shape vector, and i is the
corresponding frequency of
vibration (rad/sec). It should be emphasized that (2.5) is
satisfied using any of the n displacement solutions i sin i(t-t 0
), i=1,2,n.Defining a matrix whose columns are the eigenvectors i
and a diagonal matrix 2 which stores the eigenvalues i2 on its
diagonal; i.e.,
[ ]
=
=
2
22
21
2
21
.
.
.
;,...,,
n
n
(2.10)
the n solutions to (2.7) can be written as
2= M K (2.11)
Because the eigenvectors are M -orthonormal, we have
I M
K T
T
== 2
(2.12)
Using
( ) ( )t t X U = (2.13)
the equilibrium equations that correspond to the modal
generalized displacements will beobtained
-
8/2/2019 Calculation of C With Rayleighs Model
11/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
11
( ) ( ) ( ) ( )t T
t T
t T
t T R X K X C X M =++ &&& (2.14)
Considering (2.12),
( ) ( ) ( ) ( )t T
t t T t R X X C X =++ 2&&& (2.14a)
3. Computation of Rayleigh damping coefficients for large
systems.
The orthogonal transformation (2.14a) is valid only when the
damping matrix is proportional with the mass and stiffness matrix [
M ] and [ K ].
[ ] [ ] [ ] K M C += (3.1)It is for this reason that the damping
in the form, shown in equation (3.1), isadvantageous as on
orthogonal transformation the damping term in equation
(2.14a)reduces to:
+
++
=
2
22
21
...0
.....
.....
0..0
0..0
n
T C
(3.2)
The general form of the equilibrium equations of the finite
element system in the basis of the eigenvectors i , i=1,,n was
given in (2.14a), which shows the equilibrium equationsdecouple and
the time integration can be carried out individually for each
equation,
providing the damping effects are neglected. Considering the
analysis of systems inwhich damping effects cannot be neglected, we
still would like to deal with decoupledequilibrium equations in
(2.14a).Considering that:
ijii jT i C 2= (3.3)
where: i is a modal damping parameter and ij is the Kronecker
delta ( ij =1 for i=j, ij =0 for i j),
damping effects can readily be taken into account in mode
superposition analysis.
Therefore, using (3.3) it is assumed that the eigenvectors i ,
i=1,,n, are also C-orthogonal and the equations in (3.14a) reduce
to n equations of the form:
-
8/2/2019 Calculation of C With Rayleighs Model
12/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
12
( ) ( ) ( ) ( )t r t xt xt x iiiiiii =++ 22 &&&
(3.4)
Comparing equations (2.14a) and (3.4) and using (3.2) can be
inferred that:
+=
+=+=
2
2222
2111
2
............................
............................
2
2
nnn
(3.5)
When the system has two degrees of freedom equation (3.5)
reduces to:
+=
+=2222
2111
2
2
(3.6)
And to find the values of and , one has to solve the system of
equations (3.6).
However, while resolving a system having large degrees of
freedom, the analyst can havedifficulty obtaining the values of
Rayleigh coefficients, which shall be valid for all the n degrees
of freedom or shall be valid for all significant modes.An iterative
solution is possible and this can be obtained possibly from the
best-fit valuesof and in a particular system.Chowdhury and Dasgupta
[9] developed a method through which one can arrive at theunique
values of Rayleigh coefficients, and they will also be valid for
systems having alarge degree of freedom.
4. The calculation of and Rayleigh coefficients for n-degrees of
freedom free standing systems.
Based on equations (3.2) and (3.3) the orthogonal transformation
reduces the dampingmatrix [C] to the form:
22 iii += (4.1)
This can be reduced to the form:
22i
ii
+= (4.2)
-
8/2/2019 Calculation of C With Rayleighs Model
13/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
13
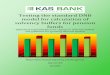
From equation (4.2) it can be observed that the damping ratio is
proportional to thenatural frequencies of the system. A typical
plot of the right term of equation (4.2) is asshown in fig.
4.1.
Damping Ratio vs. Natural Frequency
0
0.05
0.1
0.15
0.2
0.25
0 2 4 6 8 10 12 14 16
Natural Frequency - (Hz)
D a m p i n g
R a t
i o =
( C / C c )
Fig. 4.1. Damping Ratio Versus Natural Frequency.
As can be seen in fig. 4.1, the first portion (frequency range:
0.15-2.5 Hz) the curveshows marked non-linearity, and beyond
thereafter the variation is practically linear.
Thus, a set of values 1 , 2 , 3... n and 1 , 2 , 3... n , have
been assumed as thecorresponding damping ratio for ith mode
considering a linear relationship and thedamping ratio thus
obtained is given by:
( ) 111
1
+
= i
m
mi
(4.3)
where: i = damping ratio for the ith mode (for all i m); 1 =
damping ratio for the first mode;
m = damping ratio for the mth
significant mode considered in the analysis; i = natural
frequency for the ith mode; 1 = natural frequency for the first
mode; m = natural frequency for the mth significant mode considered
in the analysis;
For structures having large degrees of freedom, it is only the
first few modes whichcontribute to the significant dynamic
behavior.
-
8/2/2019 Calculation of C With Rayleighs Model
14/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
14
For most of the engineering structures, the number of
significant modes by which almost95% of the mass has participated
is usually around 3 at minimum and about 25 atmaximum [9] .Base on
an eigenvalue solutionand modal mass participationresult, one can
identify thesignificant modes ( m) and follow the procedure
outlined at the end of this chapter step by
step to determine Rayleigh coefficients and .To calculate 1 , 2
, 3... m a modal analysis with damping neglected can be performed.
It can be demonstrated that the difference between damped circular
frequency D and undamped circular frequency is minimal.Thus,
solving equations (1.22) and (1.25) at equilibrium and comparing
the solutionseasily can be concluded that:
21 = D (4.4)
The difference D and depends on the value of which for the
majority of realstructures ranges between 0.01 and 0.1 [10] . For
the extreme value of =0.1 equation
(4.4) yields: 99.0= D (4.5)Equation (4.5) indicates that the
frequency of the damped system can be taken as equal tothe natural
frequency of the corresponding undamped system. This observation
can beextended to multi-degree-of-freedom systems and is of
paramount importance in theevaluation of the natural frequencies
and mode shapes of real structures.
Damping Ratios for Various Systems.
System Damping Ratio Metals (in elastic range)
-
8/2/2019 Calculation of C With Rayleighs Model
15/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
15
= M M T ~ (4.6)
Considering I the influence vector which represents the
displacements of the massesresulting from static application for a
unit ground displacement, the modal participation
factorsmatrix can be calculated as:
M MI
M MI T
T
T P ~
== (4.7)
or individually:
iT
i
T i
M MI
i P =
(4.7a)
and modal mass participation ratios:
= iii
m P M
i M 2
(4.7b)
-
8/2/2019 Calculation of C With Rayleighs Model
16/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
16
Analytical Experiments
Further on, some analytical experiments will be considered to
determine applicability of the method for three different types of
tubular free standing structures, these being: highmast, antenna
and transmission towers.
The structures considered are twelve sided, tapered
multi-sections, interconnected usingslip joints or flanged
connections.
Transmission Tower Antenna Tower High Mast Tower A variety of
heights and weights were chosen to best represent the large array
of applications for these structures.All these structures were
designed and built by West Coast Engineering Group Ltd., thelargest
Canadian Manufacturer of Poles.For these structures the following
parameters were calculated; the first eight naturalfrequencies, the
modal mass participation factors, as well as the cumulative
mass
participation and the damping ratios with a realistic value of
0.05 for and consideredfor this type of structure.The software used
to calculate the above parameters was Algor.
-
8/2/2019 Calculation of C With Rayleighs Model
17/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
17
High Mast Towers
Table. 4.1 High Mast Towers - Natural Frequencies.Tubular High
Mast Poles Natural Frequencies
Height Bottom O.D.TopO.D. Weight (Hz)
(m) (m) (m) (kg) 1 2 3 4 5 6 7 8 18.30 0.60 0.20 860 2.03 8.27
20.45 37.25 59.69 85.21 115.28 147.4634.50 0.85 0.40 5630 0.93 3.13
7.65 13.87 22.67 33.04 45.51 59.7938.06 0.85 0.20 4000 0.75 2.57
6.28 11.42 18.66 27.25 37.59 49.44
Table. 4.2 High Mast Towers - Modal Participation Factors.
Pole Modal Participation Factor Cumulative
MassHeight (%) Participation
(m) P 1 P 2 P 3 P 4 P 5 P 6 P 7 P 8 (%)
18.30 49.75 20.50 9.55 5.63 3.48 2.67 1.75 1.53 94.934.50 42.08
21.63 10.56 6.73 3.85 3.13 1.97 1.76 91.738.06 43.06 21.10 10.43
6.54 3.80 3.04 1.94 1.70 91.6
P i /3 44.96 21.08 10.18 6.30 3.71 2.95 1.89 1.66 92.73
Table. 4.3 High Mast Towers - Damping Ratios.Pole Modal Damping
Ratios
Height (%)(m) 1 2 3 4 5 6 7 8
18.30 0.0631 0.2098 0.5125 0.9319 1.4927 2.1305 2.8822
3.686734.50 0.0501 0.0862 0.1945 0.3486 0.5679 0.8268 1.1383
1.4952
38.06 0.0521 0.0740 0.1610 0.2877 0.4678 0.6822 0.9404
1.2365
0.00
5.00
10.00
15.00
20.00
25.00
30.00
35.00
40.00
45.00
P1 P2 P3 P4 P5 P6 P7 P8
Fig. 4.2 Highmast Towers -Modal Mass Participations
Modal Mass Partic ipations
-
8/2/2019 Calculation of C With Rayleighs Model
18/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
18
Fig. 4.3 Highmast Towers - Modal Damping Ratio vs. Modal
Frequency
0.00
0.20
0.40
0.60
0.80
1.00
1.20
0 10 20 30 40 50
Modal Frequency (Hz)
M o
d a l
D a m p
i n g
R a t
i o ( % ) 18.3m
34.5m
38.06m
Fig. 4.3A Highmast Poles - Modal Damping Ratio vs. Modal
Frequency
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0 1 2 3 4 5 6
Modal Frequency (Hz)
M o
d a l
D a m p
i n g
R a t
i o ( % ) 18.3m
34.5m
38.06m
-
8/2/2019 Calculation of C With Rayleighs Model
19/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
19
Antenna Towers
Table. 4.4 Antenna Towers - Natural Frequencies.Tubular Antenna
Poles Natural Frequencies
Height BottomO.D. TopO.D. Weight (Hz)
(m) (m) (m) (kg) 1 2 3 4 5 6 7 8 10.00 0.50 0.35 1734 5.16 27.10
72.09 133.27 213.48 299.84 403.54 502.0419.50 0.65 0.35 3854 1.81
8.73 22.86 42.79 69.77 100.79 138.48 178.1020.50 0.65 0.35 3865
1.64 7.90 20.71 38.83 63.38 91.74 126.22 162.7231.70 0.98 0.38 3925
1.07 4.60 11.68 21.71 35.38 51.39 70.74 91.9034.50 0.85 0.40 7058
0.87 3.57 9.27 17.19 28.39 41.12 57.26 74.2136.00 1.05 0.60 12188
0.96 4.22 11.13 20.77 34.19 49.35 68.34 87.9538.00 1.25 0.61 6900
1.04 4.34 11.26 20.81 34.17 49.12 67.88 87.1040.80 0.61 0.61 8825
0.28 1.65 4.47 8.65 14.19 20.94 28.84 37.8640.80 0.76 0.76 8076
0.37 2.11 5.62 10.81 17.66 25.91 35.41 46.2048.30 1.53 0.75 20818
0.37 2.42 6.69 12.48 19.62 29.11 40.82 55.26
Table. 4.5 Antenna Towers - Modal Participation Factors.
Pole Modal Participation Factor Cumulative
MassHeight (%) Participation
(m) P 1 P 2 P 3 P 4 P 5 P 6 P 7 P 8 (%)10.00 58.51 19.93 7.75
4.17 2.66 1.76 1.31 0.89 97.019.50 55.19 20.11 8.30 4.57 2.86 2.03
1.43 1.14 95.620.50 55.19 20.10 8.28 4.56 2.85 2.02 1.43 1.13
95.631.70 50.26 20.36 9.09 5.20 3.22 2.37 1.62 1.35 93.534.50 49.21
21.52 9.56 5.31 3.30 2.35 1.66 1.32 94.236.00 51.63 21.35 9.14 4.91
3.12 2.13 1.57 1.19 95.038.00 49.60 21.57 9.55 5.30 3.32 2.36 1.67
1.33 94.740.80 51.95 20.33 7.92 4.14 2.54 1.73 1.23 0.91 90.840.80
54.71 20.88 8.59 4.47 2.76 1.93 1.36 0.98 95.748.30 67.70 17.03
8.24 4.38 2.00 0.46 0.13 0.03 100.0
P i /10 54.40 20.32 8.64 4.70 2.86 1.91 1.34 1.03 95.20
-
8/2/2019 Calculation of C With Rayleighs Model
20/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
20
Table. 4.6 Antenna Towers - Damping Ratios.Pole Modal Damping
Ratios
Height (%)(m) 1 2 3 4 5 6 7 8
10.00 0.1338 0.6784 1.8026 3.3319 5.3371 7.4961 10.0886
12.5510
19.50 0.0591 0.2211 0.5726 1.0703 1.7446 2.5200 3.4622
4.452620.50 0.0562 0.2007 0.5190 0.9714 1.5849 2.2938 3.1557
4.068231.70 0.0501 0.1204 0.2941 0.5439 0.8852 1.2852 1.7689
2.297834.50 0.0505 0.0963 0.2344 0.4312 0.7106 1.0286 1.4319
1.855636.00 0.0500 0.1114 0.2805 0.5205 0.8555 1.2343 1.7089
2.199038.00 0.0500 0.1143 0.2837 0.5215 0.8550 1.2285 1.6974
2.177840.80 0.0963 0.0564 0.1173 0.2191 0.3565 0.5247 0.7219
0.947240.80 0.0768 0.0646 0.1449 0.2726 0.4429 0.6487 0.8860
1.155548.30 0.0768 0.0708 0.1710 0.3140 0.4918 0.7286 1.0211
1.3820
High nonlinearity zone.
0.00
10.00
20.00
30.00
40.00
50.00
P1 P2 P3 P4 P5 P6 P7 P8
Fig. 4.4 Antenna Towers - Modal Mass Participations
Modal Mass Participations
-
8/2/2019 Calculation of C With Rayleighs Model
21/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
21
Fig. 4.5 Antenna Towers - Modal Damping Ratio vs. Modal
Frequency
0.00
0.20
0.40
0.60
0.80
1.00
1.20
0 10 20 30 40 50
Modal Frequency (Hz)
M o
d a
l D a m p
i n g
R a
t i o
( % )
Tapered 19.5m
Tapered 31.7m
Tapered 36m
Tapered 38m
Round 40m
Tapered 48.3m
Fig. 4.5A Antenna Towe rs - Modal Damping Ratio vs. Modal
Frequency
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0 1 2 3 4 5 6
Modal Frequency (Hz)
M o
d a l
D a m p
i n g
R a t
i o ( % )
Tapered 19.5m
Tapered 31.7m
Tapered 36m
Tapered 38m
Round 40m
Tapered 48.3m
-
8/2/2019 Calculation of C With Rayleighs Model
22/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
22
Transmission Towers
Table. 4.7 Transmission Towers - Natural Frequencies.Tubular
Transmission Poles Natural Frequencies
Height BottomO.D. TopO.D. Weight (Hz)
(m) (m) (m) (kg) 1 2 3 4 5 6 7 8 21.60 0.81 0.43 2085 1.84 8.84
23.06 43.00 69.86 100.40 127.41 175.6624.40 0.97 0.25 2140 1.86
7.15 17.49 31.99 51.67 74.77 101.91 132.2924.70 0.89 0.25 2215 1.66
6.53 16.09 29.55 47.88 69.43 94.98 123.4525.30 0.97 0.25 2420 1.73
6.66 16.29 29.81 48.19 69.82 95.26 123.7627.40 1.35 0.51 7965 1.97
8.41 21.11 38.69 62.21 88.67 120.19 152.7428.30 1.17 0.31 3300 1.67
6.42 15.68 28.65 46.21 66.80 90.91 177.78
Average Values 1.79 7.34 18.29 33.62 54.34 78.32 105.11
147.61
Table. 4.8 Transmission Towers - Modal Participation
Factors.
PoleModal ParticipationFactor
CumulativeMass
Height (%) Participation
(m) P 1 P 2 P 3 P 4 P 5 P 6 P 7 P 8 (%)21.60 55.00 20.17 8.38
4.64 2.91 2.07 1.45 1.16 95.824.40 47.49 20.49 9.88 5.95 3.64 2.82
1.87 1.60 93.724.70 48.31 20.47 9.71 5.77 3.54 2.71 1.82 1.54
93.925.30 47.43 20.48 9.87 5.93 3.63 2.81 1.87 1.59 93.627.40 51.17
20.55 9.32 5.40 3.37 2.52 1.66 1.42 95.428.30 47.32 20.51 9.91 5.98
3.66 2.84 1.88 1.61 93.7
P i /6 49.45 20.45 9.51 5.61 3.46 2.63 1.76 1.49 94.4
Table. 4.9 Transmission Towers - Damping Ratios.Pole Modal
Damping Ratios
Height (%)(m) 1 2 3 4 5 6 7 8
21.60 0.0596 0.2238 0.5776 1.0756 1.7469 2.5102 3.1854
4.391624.40 0.0599 0.1822 0.4387 0.8005 1.2922 1.8696 2.5480
3.307424.70 0.0566 0.1671 0.4038 0.7396 1.1975 1.7361 2.3748
3.086525.30 0.0577 0.1703 0.4088 0.7461 1.2053 1.7459 2.3818
3.094227.40 0.0619 0.2132 0.5289 0.9679 1.5557 2.2170 3.0050
3.818728.30 0.0567 0.1644 0.3936 0.7171 1.1558 1.6704 2.2730
4.4446
i /6 0.0587 0.1868 0.4586 0.8411 1.3589 1.9582 2.6280 3.6905
-
8/2/2019 Calculation of C With Rayleighs Model
23/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
23
0.00
5.00
10.00
15.00
20.00
25.00
30.00
35.00
40.00
45.00
50.00
P1 P2 P3 P4 P5 P6 P7 P8
Fig. 4.6 Transmission Towers - Modal Mass Participations
Modal Mass Participations
Fig. 4.7 Transmission Towers - Modal Damping Ratio vs. Modal
Freque ncy
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
0 20 40 60 80 100 120 140 160
Modal Frequency (Hz)
M o
d a l
D a m p
i n g
R a t
i o ( % )
-
8/2/2019 Calculation of C With Rayleighs Model
24/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
24
Analyzing the curves presented in figs. 4.1, 4.3, 4.5 and 4.7 it
can be concluded that for an equation of form:
bx y xa += ,
When x is small, the first term a/x dominates and as x increases
this term diminishesapproaching zero and the term bxstarts to
dominate the equation.In other words if the analyzed structure is
very flexible and has a very low fundamentalfrequency it will
display non-linear damping behavior in the beginning with respect
tofrequency, and will converge to a linear proportionality with
frequency as the eigenvaluesincrease with each subsequent mode.In
figs. 4.3A and 4.5A it can be seen that the 38.06m high mast tower
and respectivelythe 40m and 48.3m antenna towers display some
nonlinearities at the beginning of theanalyzed domain. However,
extreme applications were considered for these structures.
In most cases, the towers are designed to have a reasonable
rigidity and would have ahigher fundamental frequency value (see
transmission towers), and the term bx willusually dominate.
Moreover, considering the fact that the non-linear range is very
smallfor most of the investigated free standing structures, it is
not unrealistic to assume thedamping ratio for each mode is
linearly proportional to the frequency of the system.Furthermore,
the methodology outlined below will assist to identify if the
investigatedstructure shows a linear damping variation in respect
with natural frequencies.
Methodology to calculate Rayleigh Damping Coefficients and 2
Perform a modal frequency analysis to calculate the natural
frequencies; tabulatethe results (see tables: 4.1, 4.2 and 4.3)
determine the m value for which thecumulative modal mass
participation is close to 95% or higher.
Consider the 2.5mvibration modes; Select 1, the damping ratio
for the systems first vibration mode; Select m , the damping ratio
for the systems mth vibration mode; For intermediate modes i, where
1
-
8/2/2019 Calculation of C With Rayleighs Model
25/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
25
Based on the first set of data calculate with equation
(4.9):
22
1
11 22
m
mm
= (4.9)
Back-substituting the values of in expression (4.10):
21112 += (4.10)
Obtain .
Next select a second set of data consisting of: 1 , 2.5mand 1 ,
2.5m. Recalculate and based on equations (4.9) respectively
(4.10).
Now one has the three sets of data a, b, and c,below:
a) Based on linear interpolation;b) Based on data set: 1 , m and
1 , m.. c) Based on data set: 1 , 2.5m and 1 , 2.5m. d) Obtain a
fourth set of data based on the averages of b) and c).
Plot the four sets of data based on equation (4.2) and check
which data fits best with the linear interpolation curve for the
first m significant modes.
Select the corresponding values for and as the desired values
which
will give the incremental damping ratio based on Rayleigh
damping.In some cases it may happen that values will show variation
in higher modes, beyond m significant modes, but this is irrelevant
as long as the values matchclosely for the first m modes, since the
contribution of (higher) modes greater than m as can be seen above
are deemed insignificant for the system.
-
8/2/2019 Calculation of C With Rayleighs Model
26/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
26
5. Numerical Application 400 kV Transmission Tower
Lets consider the transmission tower shown in fig. 5.1.
This tower supports three 400 kV phases, has a height of 40m, 7m
span between two phases, 1.2m diameter at the base and total weight
of 15 tons.The tower is anchored using 24 anchor bolts witha
diameter of 38mm. To level the tower, levellingnuts are used as
shown in fig. 5.2.Above the base plate there is a 300mm by750mm
inspection access opening with a12.7mm thick reinforcing ring.
Fig. 5.1 400 kV Transmission Tower Fig. 5.2 Pole Bottom
Detail
We will try to investigate the response of the structure
considering damping, under dynamic induced forces by wind on the
electrical cables and by an unexpected rupture of one of the
electrical conductors.Using the methodologies presented in the
design standards ( [17] to [26] ):
- all forces will be approximated and applied in a static
fashion;- the damping coefficients will be the same for all natural
frequency modes;
This approach distorts the system response by eliminating the
most dangerous loads, thecyclic ones, which potentially generate
fatigue in the systems critical connections.
-
8/2/2019 Calculation of C With Rayleighs Model
27/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
27
To avoid this inconvenience we will use a dynamic, fully
nonlinear approach applyingthe Mechanical Event Simulation concept
3.
We will consider a 60s mechanical event defined in table 5.1 and
fig. 5.3.In order to not generate excessive perturbation, the
gravitational acceleration will be
applied gradually from 0m/s2
to 9.81m/s2
on the system (during the first 10s). When thesystem is
completely stabilized (at time 35s) wind pressure forces on the
electricalconductors will gradually be applied.
Table 5.1 Mechanical Event DescriptionMechanical Even Duration =
60 s
GravitationalWind Pressure
ForceWind Pressure
ForceTime Acceleration on Cables 2-6 on Cable 1
(s) (m/s2) (N/m2) (N/m2)0 0 0 0
10 9.81 0 030 9.81 0 035 9.81 400 1200
35.1 9.81 408 040 9.81 1200 045 9.81 1200 0
45.1 9.81 0 060 9.81 0 0
Structure Loading Diagram
0
200
400
600
800
1000
1200
0 5 10 15 20 25 30 35 40 45 50 55 60
Time (s)
W i n d P r e s s u r e
F o r c e
( N / m 2 ) o r
G r a v i
t a t i o n a l
A c c e l e r a t
i o n
( m / s 2 ) Gravitational AccelerationWind Pressure Force on
Cables 2-5
Wind Pressure Force on Cable 1
Fig. 5.3 Mechanical Event Simulation Loading Diagram
Some instability in the system will be generated by applying
various wind pressure forceson conductor 1 and simulating a rupture
of this conductor (at time 40s).
3 The methodology presented here is been used with success by
author for many structures designed and built by West Coast
Engineering Group Ltd.
-
8/2/2019 Calculation of C With Rayleighs Model
28/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
28
The problem requires plotting the axial stress in bolt #1 and to
checking the stressdistribution around the (hand) hole reinforcing
ring, and in the weld between the base
plate and shaft during the mechanical event.
Algor software will be used to simulate this mechanical
event.
For these types of complicated nonlinear applications, the
author proposes the following procedure which has been incorporated
as a standard design procedure into the WestCoast Engineering Group
Ltd. Design Process.
1) Develop a simple beam finite element model to simulate
accurately the geometricaland structural details of the
investigated system (Fig. 5.4).
This beam FE model will be used to determine thesystems natural
frequency modes (Table 5.2).
2) Using the methodology presented in chapter 4calculate the
Rayleigh damping coefficients which will
approximate the damping for all important naturalfrequency modes
(Table 5.2).
3) Using truss (or beam) finite elements simulate theelectrical
conductors.
4) Apply the loads (shown in Table 5.1) and boundaryconditions
to simulate the rupture of conductor #1.
5) Choose the start Time Step for the nonlinear solution:
1/10.
6) Graph the results in all critical areas (above the base plate
connection and all flanged connections).
Fig. 5.4 Pole beam FE Model
In this example, focus is on the pole bottom portion so the
dynamic induced loads weregraphed at 2m above the base plate and
are presented in figs. 5.5 to 5.7.
-
8/2/2019 Calculation of C With Rayleighs Model
29/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
29
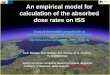
Table 5.2 Natural Frequency Modes and Rayleigh Damping
Coefficients.
A B C D
Frequency Frequency Linear Up to 6th modeUp to 18th
modeAverage((B+C)/2)
Mode Dampingapprox.
Dampingapprox.
Damping DampingNr. (Hz) (%) (%) (%) (%)1 0.407 0.0200 0.0200
0.0200 0.02002 2.064 0.0241 0.0100 0.0091 0.00953 7.477 0.0375
0.0238 0.0205 0.02214 12.339 0.0495 0.0382 0.0328 0.03555 15.937
0.0584 0.0490 0.0420 0.04556 25.391 0.0817 0.0775 0.0664 0.07207
32.793 0.1000 0.1000 0.0857 0.09288 47.443 0.1362 0.1445 0.1237
0.13419 55.903 0.1571 0.1702 0.1457 0.1580
10 61.211 0.1702 0.1863 0.1596 0.173011 74.818 0.2038 0.2277
0.1950 0.211412 81.973 0.2215 0.2495 0.2136 0.231513 86.647 0.2330
0.2637 0.2258 0.244714 95.333 0.2545 0.2901 0.2484 0.269315 111.235
0.2938 0.3385 0.2898 0.314116 115.225 0.3036 0.3506 0.3002 0.325417
127.509 0.3340 0.3880 0.3322 0.360118 140.831 0.3669 0.4285 0.3669
0.3977
Rayleigh Damping Coefficients
B B= 0.0061
B= 0.0153C C= 0.0052
C= 0.0154
D D= 0.0056
D= 0.0153
-
8/2/2019 Calculation of C With Rayleighs Model
30/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
30
400 kV Transmission Y Tower Damping Ratio vs. Natural
Frequency
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0 20 40 60 80 100 120 140
Natural Frequency - (Hz)
D a m p
i n g
R a
t i o
=
( C / C c
)
A
B
C
D
Fig. 5.4 400 kV Transmission Tower Averaged Damping Ratio.
Fz vs. Time
-350000
-300000
-250000
-200000
-150000
-100000
-50000
0
0 5 10 15 20 25 30 35 40 45 50 55 60
Time (s)
F z
( N )
Fz vs. Time
Fig. 5.5 400 kV Transmission Tower Fz Dynamic Induced Load.
-
8/2/2019 Calculation of C With Rayleighs Model
31/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
31
Fx vs. Time
-40000
-30000
-20000
-10000
0
10000
20000
30000
40000
0 5 10 15 20 25 30 35 40 45 50 55 60
Time (s)
F x
( N )
Fx vs. Time
Fig. 5.6 400 kV Transmission Tower Fx Dynamic Induced Load.
Fy vs. Time
-20000
-15000-10000
-5000
0
5000
10000
15000
20000
250000 5 10 15 20 25 30 35 40 45 50 55 60
Time (s)
F y
( N )
Fy vs. Time
Fig. 5.7 400 kV Transmission Tower Fy Dynamic Induced Load.
-
8/2/2019 Calculation of C With Rayleighs Model
32/37
-
8/2/2019 Calculation of C With Rayleighs Model
33/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
33
For example: using plate finite elements to simulate the hand
hole reinforcing ring, it iseasy to investigate the effect of
thickness of the hand hole reinforcing ring on the
stressdistribution around this opening.
Fig. 5.9 400 kV Pole Bottom Stress Distribution
400 kV Transmission Tower Anchor Bolt #1 - Axial Stress vs.
Time
-12000000
-10000000
-8000000
-6000000
-4000000
-2000000
0
2000000
4000000
30 32 34 36 38 40 42 44 46 48
Time (s)
A x i a l S t r e s s
( N / m
2 )
Fig. 5.10 Axial Stress Variation in Bolt #1.
-
8/2/2019 Calculation of C With Rayleighs Model
34/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
34
In fig.5.10 is presented the axial stress variation in bolt#1
between t=30s and t=48sduring the analyzed mechanical event.It is
very important to observe that the dynamic induced loads applied to
the modeltriggered the first two natural frequency modes ( 1=0.407
Hz and 2=02.064 Hz).
The model presents behaviour of the areas of interest with a
very high degree of detail.
6. Conclusions
How important is durability?In 1982 [27] , the Battelle
Laboratories were commissioned by the United Statesgovernment to
estimate the annual cost of fatigue and fracture to the countrys
economy.Battelle concluded that the cost was 4.4 percent of the
gross national product, or in other words, billions of dollars, and
that this cost could be reduced by 29 percent theapplication of
current technology.
This study says nothing about the amount of money wasted by
over-designed products toavoid fatigue and fracture problems. So,
how important is durability? Very. It is alsowidely recognized that
approximately 80 to 90 percent or more of mechanical failuresarise
from fracture and fatigue problems.This Paper presents a modern,
new approach in designing free standing structures that aresubject
to dynamic induced loads, the sources of structural fatigue.The
procedures outlined in this paper involve the most advanced
engineering simulationconcept Mechanical Event Simulation to
investigate, analyze, and optimize verycomplex geometries (see
fig.6.1) that are usually the most critical areas for free
standingstructures.
Fig.6.1 Critical Connection for a Transmission Tower.
These complicated connections, can not usually be investigated
using closed formsolutions. The high degree of detail makes it
practically impossible for even a veryexperienced design engineer,
to predict the systems response to dynamic induced loads.
-
8/2/2019 Calculation of C With Rayleighs Model
35/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
35
Most of the design standards ( [17] to [26] ) present
methodologies to design thestructures for fatigue, but lack in
providing methods to realistically account for thefatigue sources
being the interactions between the analyzed system and
the(surrounding) real world elements, which in most cases are of
nonlinear nature.The new design approach proposed in this paper
places the system in direct contact with
the surrounding environment and calculates the loads based on
this interaction.Using this method the engineer no longer has to
approximate the loads and to apply themstatically. The simulated
interaction will be a realistic one triggering the fatigue
sourceswhich are the cyclic loads.When analyzing the effect of
cyclic loads on systems, it is very important to account for the
damping effect. Some design standards and technical literature do
offer values for damping ratios determined for the systems first
natural frequency mode.
As presented above, interaction between the system and its
surrounding real worldelements will likely trigger more than one
frequency mode. Thus it is important to useRayleigh coefficients
for a good approximation of damping, at higher frequency modes
as well.A method to account for damping is also outlined in this
paper and its applicability to themost common free standing
structures is checked.
The methodology presented in this paper was checked using Algor
simulation softwarethat incorporates the necessary provisions to
implement it.
All simulation procedures were developed and tested by the
author as a part of theresearch and development program Stability
of Free Standing Structures Under Dynamic Induced Loads initiated
by the author, at West Coast Engineering Group Ltd.
Some results and animated files can be seen on the West Coast
Engineering Group Ltd.web site: www.wceng-fea.com .
-
8/2/2019 Calculation of C With Rayleighs Model
36/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
36
References
1. Erikson, K (Ed), Estep, D, Hansbo, P and Johnson, C
ComputationalDifferential Equations, 1996, Cambridge University
Press. ISBN 0521-567-386.
2. Ulises F. Gonzlez, Michael L. Bussler, Algor Inc., Using
Mechanical Event
Simulation in the Design Process.3. Sandipon Adhikari, Damping
Models for Structural Vibration, Ph. D. Thesis,
Cambridge University, Engineering Department, September 2000.4.
Finn Rudinger, Modeling and Estimation of Damping in Non-Linear
Random
Vibration, Ph. D. Thesis, Technical University of Denmark,
MechanicalEngineering Department, October, 2002.
5. Klaus Jurgen Bathe, Finite Element Procedures in Engineering
Analysis.Prentice-Hall Inc, Englewood Cliffs, New Jersey, 1982.
6. W. Weaver, Jr., S.P. Timoshenko, D. H. Young, Vibration
Problems inEngineering, Fifth Edition, John Wiley & Sons,
1990.
7. Daniel J. Inman, Engineering Vibration, Second Edition,
Prentice Hall, 2001.
8. David V Hutton, Fundamentals of Finite Element Analysis, Mc
Graw-Hill, 2004.9. Indrajit Chowdhury, Shambhu P. Dasgupta,
Computation of Rayleigh DampingCoefficients for Large Systems, The
Electronic Journal of GeotechnicalEngineering, Volume 8/2003,
Bundle 8C
10. Constantine C. Spyrakos, Finite Element Modeling in
Engineering Practice, Algor Publishing Division, Pittsburg, PA,
1994.
11. Constantine C. Spyrakos & John Raftoyiannis, Finite
Element Analysis inEngineering Practice, Algor Publishing Division,
Pittsburg, PA, 1997.
12. Vince Adams and Abraham Askenazi, Building Better Product
with FEA - 1999.13. Chandrakant S. Desai, Elementary Finite Element
Method, Prentice-Hall, Inc.,
1979.
14. Kenneth H. Huebner, The Finite Element Method for Engineers,
John Wiley &Sons, 1975.15. D.H. Norrie, G. Devries, An
Introduction to Finite Element Analysis, Academic
Press, 1978.16. Eric B. Becker, Graham F. Carey, J. Tinsley
Oden, Finite Elements An
Introduction, Volumes 1, 3 & 5 Prentice Hall, 1984.17.
Standard Specifications for Structural Supports for Highway Signs,
Luminaires
and Traffic Signals, American Association of State Highway and
TransportationOfficials, 2001.
18. National Building Code of Canada, National Research Council
of Canada, 1995.19. Ontario Highway Bridge Design Code - Ministry
of Highways and Communications
Ontario 1983.20. Canadian Highway Bridge Design Code
CAN/CSA-S6-00.21. National Research Council, Transportation
Research Board NCHRP-Report 469
Fatigue-Resistant Design of Cantilevered Signal, Sign, and Light
Supports. 2002.
22. Design of Steel Transmission Pole Structures, Second
Edition, 1990, AmericanSociety of Civil Engineering Manuals and
Reports on Engineering Practice
N0.72.
-
8/2/2019 Calculation of C With Rayleighs Model
37/37
Dynamic Analysis with Damping for Free Standing Structures using
Mechanical Event Simulation
23. Tubular Steel Structures Theory and Design, M. S. Troitsky,
The James F.Lincoln Arc Welding Foundation, Cleveland, Ohio,
1982.
24. NTE 003/04/00 Design Standards for Electrical Transmission
Lines over 100kV (Replaced Standard PE 104).
25. PE 105 Design Methodology for Electrical Transmission Lines
Steel Towers.
26. STAS 10101/20-90 Structural Loads Induced by Wind
RomanianStandardization Institute 1990.27. MSC Software How and Why
do Structures Fail 2002 MSC Software
Corporation.



![Analytical Model for the Calculation of Long Term Crack Width · shown in Fig. 1 (c). Al-Zaid [1] developed an analytical model for the calculation of long term cracking moment. The](https://img.pdfslide.us/doc/110x75/5e1f0ef62f32c624f35756ff/analytical-model-for-the-calculation-of-long-term-crack-width-shown-in-fig-1-c.jpg)