Embed Size (px)
Citation preview

Two Dimensional Geometries: Exercise pages
C. Herbert ClemensMathematics Department
Ohio State UniversityColumbus, OH 43210


3
Exercise 1. a) Write out the Theorem above in the case in which n = m =p = 1 to be sure that you recognize how it is just a several variable formulation ofthe most important theorems from your introductory course in calculus.
b) Write the full 2⇥ 2 matrix form of the Chain Rule when n = m = p = 2.

4
Exercise 2. a) Write out the above Theorem in the case in which n = 1 tobe sure that you recognize how it is just a several variable formulation of the mostimportant theorem from your introductory course in integral calculus.
b) Integrate sin�y21 + y
22
�over the region in the (y1, y2)-plane bounded by the
unit circle.Hint: Use the Substitution Rule to change (y1, y2) to polar coordinates.

5
Exercise 3. Given an angle \BAC show by drawings the two regions into whichit divides the plane. Show how the (signed) measure of the angle depends onwhich region you pick and on which is the initial ray and which is the final ray ofthe angle.

6
Exercise 4. Using a sketch on grid paper or an algebraic formulation in theEuclidean plane,
a) give a concrete example of a rigid motion that takes (1, 2) to (3, 5),b) modify your answer in a) so that the tangent vector (1, 0) emanating from
(1, 2) goes to the tangent vector (0, 1) emanating from (3, 5).

7
Exercise 5. (NG) Think back to high school days and write the trianglecongruence rules SSS, SAS, and ASA, in other words “side-side-side,” “side-angle-side,” and “angle-side-angle.” Be careful with your wording for each rule so thattwo triangles can be moved onto each other by a rigid motion if and only if theysatisfy they satisfy that rule.
Write vertices in corresponding order and denote length of the segment AB as|AB|:
SSS: Triangle 4ABC is congruent to triangle 4A0B
0C
0 if and only if |AB| =|A0
B0|, |BC| = |B0
C0|, and |CA| = |C 0
A0|.
SAS: Triangle 4ABC is congruent to triangle 4A0B
0C
0 if and only if two sets ofcorresponding sides have equal lengths and the measures of the angles between themare equal, that is, if e.g. the corresponding sides |AB| = |A0
B0| and |BC| = |B0
C0|
and \ABC ⇠= \A0B
0C
0.ASA: Triangle 4ABC is congruent to triangle 4A
0B
0C
0 if and only if two setsof corresponding angles have equal measures and the of the corresponding sidesbetween them are have equal lengths, that is, if e.g. the corresponding angles\ABC ⇠= \A0
B0C
0 and \CAB ⇠= \C 0A
0B
0 and |AB| = |A0B
0|.
8
Exercise 6. Give a counterexample to show that there is no universal SSAlaw.

9
Exercise 7. a) Given an angle \BAC and a ray R, use E1-E4 to produce anangle congruent to \BAC but having R as one of its sides.
b) Use a) and E1-E4 to prove the SAS rule for congruent triangles.

10
Exercise 8. (NG) Suppose, in the diagram below that |BD| = |CD| and|AD| = |ED|.
a) Show that \ADB = \CDE have the same measure and so are congruent.(A pair of opposite angles where two lines cross is called a vertical angle pair. Yourargument will show that the two opposite angles in any vertical angle pair arecongruent.)
b) Show that triangle 4BDA and triangle 4CDE are congruent. [MJG,138]

11
Exercise 9. In 4ABC below, an exterior angle at vertex C is formed by aside of the triangle that contains C and the outward extension of the other side ofthe triangle containing C. Show in Neutral Geometry that the measure of eitherexterior angle of the triangle at C is greater than the measure of either remoteinterior angle. [MJG,119]
Hint: Compare this figure with the figure in Exercise 8.

12
Exercise 10. Use Exercise 9 to show that the sum of any two angles of atriangle is less than 180�.Hint: Begin with the fact that the sum of the measures of the interior angle at C
and either exterior angle at C is 180°.

13
Exercise 11. (NG) Show in NG that, if two lines cut by a transversal linehave a pair of congruent alternate interior angles, then they are parallel. [MJG,117]
Hint: Suppose the assertion is false for some pair of lines. Find a triangle thatviolates the conclusion of Exercise 9.

14
Exercise 12. (NG) For the diagram in Exercise 8, show that the sum of theangles in 4ACE is the same as the sum of the angles in 4ACB.

15
Exercise 13. (NG) Suppose that there is a triangle 4ABC in NG for whichthe sum of the angles in a triangle 4ABC is (180 + x) with x > 0. For the 4ABC
in Exercise 8, show that one of the angles of 4ACE is no more than half the sizeof \BAC. Yet by Exercise 12 the sum of the angles in a triangle 4ACE is still(180 + x) °.Hint: In the diagram in Exercise 8, this new ‘smaller’ angle may or may not havevertex A. [MJG,125-127]

16
Exercise 14. (NG) Suppose that there is a triangle 4ABC in NG for whichthe sum of the angles in a triangle 4ABC is (180 + x) ° with x > 0. Let ↵ denotethe measure of \BAC.
a) Rename the vertices of 4ACE in Exercise 13 to get the same triangle de-noted as 4A2B2C2 but with A2 denoting the vertex (either A or E) that has thesmaller angle. Repeat the above constructions to construct a triangle for which thesum of the angles in a triangle 4ABC is (180 + x) ° but one of its angles is lessthan or equal to
1
4↵.
b) Repeat the construction in Exercise 13 over and over again n-times to con-struct a triangle with the sum of its angles still equal to (180 + x) ° but such thatone of its angles has size less than
1
2n↵.
Hint: Use Exercise 13 over and over again.
17
Exercise 15. (NG) Suppose that there is a triangle 4ABC in NG for whichthe sum of the angles in a triangle 4ABC is (180 + x) ° with x > 0. Show thatthere is a positive integer n0 so that, if you repeat the construction in Exercise13 n0-times, the result will be a triangle 4An0Bn0Cn0 with the sum of its anglesstill equal to (180 + x) ° but with one of its angles having measure less than x.[MJG,125-127]Hint: Remember that x > 0 is fixed once and for all at the beginning of theargument in Exercise 13 . Then use that lim
n!112n↵ = 0.

18
Exercise 16. (NG) a) For 4An0Bn0Cn0 in Exercise 15, explain why the sumof two of its interior angles would have to be greater than 180º.
b) Use Exercise 10 to conclude that you cannot have a triangle with two anglessumming to more than 180°. [MJG,124]

19
Exercise 17. (NG) Show the following:a) The sum of the interior angles in any quadrilateral is no greater than 360°.b) The sum of the interior angles of an n-gon is no greater than (n� 2)·180°.
Hint: Divide the n-gon into a triangle and a (n� 1)-gon and use induction.

20
Exercise 18. (NG)
a) If we add the line segment AD to the figure above, show that \BAD iscongruent to \ADC.
b) Use Exercise 17 to show that the two congruent angles in a) must each havemeasure less that or equal to 90°.

21
Exercise 19. (NG)
Show that the measure of \BA0D is less than the measure of \A0
DC.Hint: Use Exercise 18 and Exercise 9.

22
Exercise 20. Use the three implications just above and pure logic to showthat
\BAD < \ADC implies that |AB| > |CD|,\BAD = \ADC implies that |AB| = |CD|,\BAD > \ADC implies that |AB| < |CD|.
Hint: If the first implication is false, then \BAD < \ADC and either |AB| < |CD|or |AB| = |CD|. If |AB| < |CD|, we have already shown that \BAD > \ADC,so we have a contradiction! Etc., etc.

23
Exercise 21. (EG) a) Show that, if two parallel lines L and M are cut by atransversal line, opposite interior angles are equal.Hint: Concentrate on the words ‘only one’ in E5.
b) Show that, if two parallel lines L and M are cut by a transversal line,corresponding angles are equal.
Hint: Use a) and the fact that vertical angles are equal.

24
Exercise 22. a) Show that, if a line T crosses one of two parallel lines L andM , it must cross the other.
b) Show that, if two distinct lines L and M are both parallel to another line,then they are parallel to each other.

25
Exercise 23. a) Show that angles \BAC and \B0A
0C
0 in the Euclidean planeare equal (i.e. have the same measure) if their corresponding rays are parallel.Hint: Construct a transversal through A and A
0.b) Show that \BAC and \B0
A0C
0 are equal (i.e. have the same measure) if\B0
A0C
0 can be rotated around A0 to obtain an angle \B00
A0C
00 with correspondingrays parallel to those of \BAC.

26
Exercise 24. (EG) Use the ‘only one’ assertion in E5 together with whatwe have established about Neutral Geometry to show that in EG the sum of theinterior angles of any triangle is 180°.

27
Exercise 25. (EG) Show that in EG the sum of the interior angles of aquadrilateral is 360°.

28
Exercise 26. (EG) a) Show in EG that, given any positive real numbers a
and b, there exists a rectangle with adjacent sides of lengths a and b.Hint: Construct a third side of length a perpendicular to the side of length b thatis, the two sides meet in a right angles. Then use Exercises 18a) and 25.
b) If we define the area inside the rectangle with adjacent sides of lengths a
and bas a·b, show that the area of any right triangle is 12 (base) · (height).
c) Show that the area of (i.e. inside) any triangle is 12 (base) · (height).
Hint: Find two right triangles such that the area of the given rectangle is the sumor difference of the areas of the right triangles.

29
Exercise 27. (EG) Show that there is a cartesian coordinate system on EG,that is, the set of points of EG are in 1� 1 correspondence with the set of pairs ofreal numbers. Write your solution as if you are explaining this to an eighth-grader.

30
Exercise 28. (EG) Show that the slope of a line in a cartesian plane is ob-tained by taking any two points (x1, y1) and (x2, y2) and computing
y2 � y1
x2 � x1
for any two distinct points (x1, y1) and (x2, y2) on the line.

31
Exercise 29. (EG) a) Show that two lines in a cartesian plane are parallel ifand only if they have the same slopes.Hint: Use Exercise 21.
b) Show that two lines L and M intersecting at a point P are perpendicular ifand only if the product of their slopes is �1 (or one has slope 0 and the other hasslope ±1).Hint: Suppose that the slopes are not 0 or ±1. Draw the line N parallel to thex-axis through P . Show that the following two statements are equivalent:
i) the right triangle having one side along N and having hypotenuse along L
and of length 1 is congruent to the right triangle with side on N and length 1hypotenuse along M ,
ii) L and M are perpendicular.

32
Exercise 30. (EG) State the Pythagorean theorem in EG and use Exercise26 to prove it.Hint: For the give right triangle, draw a cartesian coordinate system with (0, 0)at the vertex of the right triangle and with the x-axis containing one side of theright angle and the y-axis containing the other side. In that cartesian plane, drawa square with vertices (0, 0) , (a+ b, 0) , (0, a+ b) and (a+ b, a+ b). Inside thatsquare, draw the square with vertices (a, 0) , (a+ b, a) , (b, a+ b) and (0, b). Showby rearranging the triangles in your drawing that the area of the big square is thearea of the little square plus the area of 4 right triangles, each of area ab
2 . (Such anargument is one of the ones that depends least on the particular choice of cartesiancoordinate system.

33
Exercise 31. Use the Pythagorean theorem to justify the definition (3.2.1).

34
Exercise 32. (Triangle Inequality) Show that, for any three points (a1, b1),(a2, b2), and (a3, b3) in the cartesian plane,
d ((a1, b1) , (a3, b3)) d ((a1, b1) , (a2, b2)) + d ((a2, b2) , (a3, b3)) .
Hint: Write what you need to show in terms of(x1, x2) := (a2 � a1, b2 � b1)(y1, y2) := (a3 � a2, b3 � b2)
(x1 + y1, x2 + y2) = (a3 � a1, b3 � b1) .
Then use that(x1y2 � x2y1)
2 � 0.

35
Exercise 33. The next Theorem is called the Law of Cosines. As you workthrough the proof, construct a diagram or picture for each step.

36
Exercise 34. Give a quick proof of the triangle inequality using the Law ofCosines.

37
Exercise 35. Do algebra on the left-hand-side of the last equation above toderive Heron’s formula
Area =ps (s� a) (s� b) (s� c)
where s = a+b+c2 .
38
Exercise 36. (EG) Using cartesian coordinates for the plane, show that themapping D defined in (3.4.1) satisfies all three conditions in the definition of adilation with magnification factor r and center (x0, y0).Hint: For the second condition, use a parametric representation for a line through(x0, y0).

39
Exercise 37. (EG) Show (using the Substitution Rule, Theorem 2, if youwish) that a dilation with magnification factor r multiplies all areas by a factor ofr2.

40
Exercise 38. (EG) a) Show that the inverse mapping of a dilation is again adilation with the same center but with magnification factor r
�1.Hint: Use (3.4.2) and solve for (x, y) in terms of
�x, y�.
b) Show that a dilation D takes lines to lines.Hint: Start with a line
ax+ by = c
in the�x, y�-plane. Show that it comes from a line in the (x, y)-plane by substitution
using (3.4.2). Or start with a lineax+ by = c
in the (x, y)-plane and use the formula for D�1 you derived in a) .
41
Exercise 39. (EG) Show that a dilation takes any line to a line parallel (orequal) to itself.Hint: Compute slopes.

42
Exercise 40. (EG) Show that a dilation by a factor of r takes any vector tor times itself.Hint: Realize the vector as the difference of two points.

43
Exercise 41. (EG) Show that a dilation of the plane preserves angles.Hint: Use Exercise 23a) and Exercise 39.

44
Exercise 42. (EG) a) Show that, if two triangles are similar, then correspond-ing angles are equal.Hint: You have to start from the supposition that the two triangles satisfy thedefinition of similar triangles.
b) Show that, if corresponding angles of 4ABC and 4A0B
0C
0 are equal, then4ABC and 4A
0B
0C
0 are similar.Hint: You have to start from the supposition that corresponding angles of thetwo triangles have equal measure, then dilate 4ABC with a dilation for whichr = |A0
B0|/|AB|. Finally use ASA to show that the dilation of 4ABC is congruent
to 4A0B
0C
0.

45
Exercise 43. (EG) Show that two triangles are similar if corresponding sidesare parallel.Hint: Use Exercise 23a).

46
Exercise 44. Show that two triangles are similar if corresponding sides areperpendicular.Hint: Extend one of the rays of the first triangle until it crosses the correspondingray of the second triangle.

47
Exercise 45. (EG) Denote the measure or area of a triangle 4ABC as|4ABC|. Show that, in the diagram below,
|AF ||FB| =
|4AFC||4CFB| =
|4AFX||4XFB| .

48
Exercise 46. (EG) Use Exercise 45 to show by pure algebra that
(0.0.1)|AF ||FB| =
|4AXC||4CXB| .
Hint: |4AXC| = |4AFC|� |4AFX|, etc.

49
Exercise 47. (EG) For three concurrent segments AD, BE and CF as givenin Exercise 45, use Exercise 46 to show that
|AF ||FB| ·
|BD||DC| ·
|CE||EA| = 1.
Hint: Use Exercise 46 with side BC replacing AB and with side CA replacing AB.

50
Exercise 48. (EG) A median of a triangle is a line segment from a vertexto the midpoint of the opposite side. Show that the medians of any triangle meetin a common point.Hint: Use Ceva’s Theorem.

51
Exercise 49. (EG) The circle of radius 1 has (interior) area that we denoteas ⇡. Use this to reason to the fact that the circle of radius 1 has circumference 2⇡.
Hint: Slice up the circle into equal size slices as illustrated in the above picture.Approximate a rectangle by rearranging those slices. Notice that the greater thenumber of slices, the better the approximation. Use that the area covered by theslices is independent of the number of slices to conclude that it must be the sameas the area of the limiting rectangle.

52
Exercise 50. (EG) On the circle with center O below,
show that\AXB = (1/2)(\AOB).
Hint: 4OAX is isosceles.

53
Exercise 51. (EG) On the circle with center O below,
show that\AXB = (1/2)(\AOB).
Hint: Draw the diameter through O and X, use Exercise 50 and add.

54
Exercise 52. (EG) On the circle with center O below,
show that\AXB = (1/2)(\AOB).
Hint: Draw the diameter through O and X, use Exercise 50 and subtract.

55
Exercise 53. (EG) Use similar triangles and the previous Exercises to showthat |AX|·|XB| = |A0
X|·|XB0| in the figure below.
Hint: Draw AB0 and A0B.
56
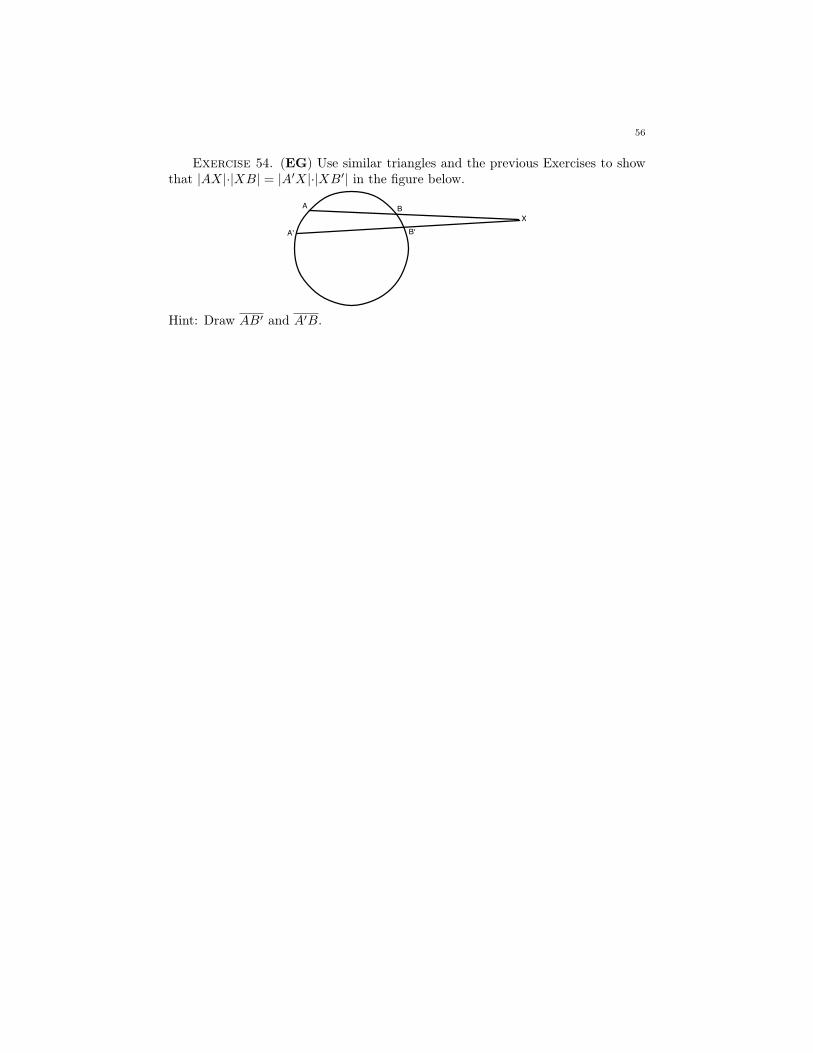
Exercise 54. (EG) Use similar triangles and the previous Exercises to showthat |AX|·|XB| = |A0
X|·|XB0| in the figure below.
Hint: Draw AB0 and A0B.

57
Exercise 55. Show that, given any three non-collinear points in the cartesianplane, there is a unique circle passing through the three points.Hint: The three non-collinear points are the three vertices of a unique triangle. Pickany two sides of that triangle and form their perpendicular bisectors. Show thatthe center of the circle must be the point at which those perpendicular bisectorsintersect.

58
Exercise 56. (Extended Law of Sines) In the diagram below, O is the centerof the circle and d is its diameter.
Show thatsin↵
|AB| =1
d.
Hint: Bisect AB at a point C. Compare inscribed to central angle to show that|AC||OA| = sin↵ =
|BC||OB| .

59
Exercise 57. (EG) In the diagram below, show that|AB||CB| =
sin↵
sin�=
sin (\AOB)
sin (\COB).
Hint: Use the Extended Law of Sines. Alternatively notice that by Theorem 9m (\BAO) +m (OCB) = 180�
so thatsin (\BAO) = sin (\OCB) .
Now use the Law of Sines.

60
Exercise 58. (EG) Show that if, in the above figure, B moves along the circleto the other side of C, it is still true that
|AB||CB| =
sin (\AOB)
sin (\COB)

61
Exercise 59. (EG) In the diagram
show that|A0
B0|
|C 0B0| =sin (\A0
OB0)
sin (\C 0OB0)÷ sin (\B0
A0O)
sin (\B0C 0O).
[MJG,266-267]

62
Exercise 60. (EG) Show that if, in the above figure, B0 moves along the lineto the other side of C 0, it is still true that
|A0B
0||C 0B0| =
sin (\A0OB
0)
sin (\C 0OB0)÷ sin (\B0
A0O)
sin (\B0C 0O).

63
Exercise 61. a) Show that, in the figure
we have the equality(A : B : C : D) = (A0 : B0 : C 0 : D0) .
Hint: Use Exercises 57-60.b) What happens in a) if we move B to the other side of C?

64
Exercise 62. a) Draw four points in the Euclidean plane, no 3 of which arecollinear, that cannot lie on a single circle. With the help of a ruler, show that thedistances between pairs of the four points violate the equality in Ptolemy’s theorem.
b) Draw four points in the Euclidean plane that do lie on a single circle. Withthe help of a ruler, show that the distances between pairs of the four points satisfythe equality in Ptolemy’s theorem.

65
Exercise 63. (Addition Law for Sines) The diameter of the circle below is 1.Use Ptolemy’s Theorem and the Extended Law of Sines to show the Addition Lawfor Sines
sin (↵+ �) = sin↵· cos� + cos↵· sin�.
Hint: Examine the central angles associated to the chords |AD| and |BC|.

66
Exercise 64. (EG) Show that an r ⇥ r ⇥ r cube can be constructed fromthree equal pyramids with an r⇥ r square base. Conclude that the volume of eachpyramid is 1/3 the volume of the cube, namely
1
3·r3.
Hint: Suppose the cube had a hollow interior and infinitely thin faces. Put your(infinitely tiny) eye at one vertex of the cube and look inside. How many faces ofthe cube can you see?

67
Exercise 65. Show that Cavalieri’s Principle is true for the pyramid usingseveral variable calculus.
Hint: Put the base of the pyramid P so that its vertices are (0, 0), (r, 0), (0, r)and (r, r) in 3-dimensional Euclidean space. Consider the transformation
�x, y, z
�= (x, y, z)
0
@1 0 00 1 0a b 1
1
A
and notice thatZ
Pdxdydz =
Z
P
������
0
@1 0 00 1 0a b 1
1
A
������dxdydz.

68
Exercise 66. Prove the magnification principle using several variable calculus.Hint: Use the transformation
�x1, . . . , xn
�= (x1, . . . , xn)
0
@r1 . . . 0. . . . . . . . .
0 . . . rn
1
A
and the Substitution Rule (Theorem 2) to compareZ
Pdx1 . . . dxn with
Z
Pdx1 . . . dxn.
69
Exercise 67. (EG) Use this magnification principle to justify the volumeformula
(1/3)B·hfor any pyramid with rectangular base of area B and vertical altitude h.

70
Exercise 68. (EG) a) Why is the area B of the base of the pyramid caughtbetween B � " and B + "?
b) Show that the volume V of the pyramid is caught between (1/3)·t·h and(1/3)·T ·h.

71
Exercise 69. (EG) a) Argue that, given any positive real number ", how-ever small, the volume V of the pyramid is caught between (1/3)·(B � ")·h and(1/3)·(B + ")·h.
b) Show the formulaV = (1/3) ·B·h
for the volume of a pyramid, where B is the area of the base and h is the verticalheight.

72
Exercise 70. (SG) a) Why can you think of the disco-ball as being made upof pyramids, with each pyramid having base one of the tiny mirrors and vertex atthe interior point O at the center of the disco-ball.
b) Argue that the volume of the disco-ball is (approximately) (1/3) times thedistance h from a mirror to O times the sum of the areas of all the mirrors.

73
Exercise 71. (SG) Argue that, as the mirrors are made to be smaller andsmaller,
1) the sum of the areas of the mirrors approaches the surface area of a sphere,2) the distance h approaches the radius R of that sphere,3) the volume of the disco-ball approaches the volume of the region whose
boundary is the sphere.4) Use limits to conclude that, for a sphere of radius R in Euclidean 3-space,
the relation between the volume V of the region bounded by the sphere and thesurface area S of the sphere is given by the formula
V =R·S3
.

74
Exercise 72. (SG) Explain why the area of the ↵-lune is 2↵·R2.
75
Exercise 73. Give a formula for the area of any spherical n-gon.Hint: Divide the spherical n-gon into spherical triangles.

76
Exercise 74. Give the formula for the length���V��� of a vector V =
⇣a, b, c
⌘in
3-dimensional Euclidean space in terms of dot product.

77
Exercise 75. Lemma 2 does not distinguish between the two angles that thevectors determine in the plane that they span. What can you say about the cosineof the two angles formed by two vectors V1 and V2, that is, what is the relationbetween the formula using # and the formula using (360� � #)?

78
Exercise 76. Show that the area of the parallelogram determined by V1 andV2 emanating from the same point in Euclidean 3-space is given by
(0.0.2)���V1
��� ·���V2
��� · sin#.

79
Exercise 77. Show that we have the following equality of matrices✓
V1 • V1 V2 • V1
V1 • V2 V2 • V2
◆=
0
@
⇣V1
⌘
⇣V2
⌘
1
A ·⇣ ⇣
V1
⌘t ⇣V2
⌘t ⌘.

80
Exercise 78. a) Give two examples of smooth curves,
X1 (s) = (x1 (s) , y1 (s) , z1 (s))
X2 (t) = (x2 (t) , y2 (t) , z2 (t))
neither of which is a straight line, in 3-dimensional Euclidean space. Do this so thatthe two curves pass through a common point and go in distinct tangent directionsat that point. Please choose curves so that none of the coordinate functions of s ort is a constant function. [DS,71ff]
b) Compute the tangent vectors of each of the two curves at each of their points.c) For the two curves you defined in a), what are the coordinates of the point
in Euclidean 3-space at which the two curves intersect?d) Use the dot product formula to compute the angle # between (the tangent
vectors to) your two example curves in a) at the point at which the curves intersect.[DS,20-21]

81
Exercise 79. Compute the length of the tangent vector
l(t) =
sdX
dt• dX
dt=
vuuut�
dxdt
dydt
dzdt
�·
0
@dxdtdydtdzdt
1
A
to each of your two example curves in Exercise 78 at each of their points.

82
Exercise 80. Write the formula for the tangent vector to the path (6.2.1) ateach point using (x (t) , y (t) , z (t))-coordinates. Show that the length of this pathis R⇡.

83
Exercise 81. Compute the length of each of your two example curves in Ex-ercise 78.

84
Exercise 82. Use spherical coordinatesx (s, t) = R· sin s· cos ty (s, t) = R· sin s· sin t
z (s, t) = R· cos sand the definition just above to compute the area of an ↵-lune on the sphere ofradius R.

85
Exercise 83. Suppose M is such that
M · M t =
0
@1 2 02 1 00 0 1
1
A .
Find a vector V =⇣a, b, c
⌘such that
V · M · M t · V t 6= V · V t.

86
Exercise 84. Show that the matrix
M =
0
@cos# sin# 0� sin# cos# 0
0 0 1
1
A
is orthogonal. Can you describe geometrically what this rigid motion is doing tothe points in Euclidean 3-space?

87
Exercise 85. Show that the matrix
M =
0
@cos 0 sin 0 1 0
� sin 0 cos
1
A
is orthogonal. Can you describe geometrically what this rigid motion is doing tothe points in Euclidean 3-space?

88
Exercise 86. (SG) Show that the set of orthogonal matrices M form a group.That is, show that
a) the product of two orthogonal matrices is orthogonal,b) recall from linear algebra that matrix multiplication (when defined) is asso-
ciative,c) the identity matrix is orthogonal,d) the inverse matrix M
�1 of an orthogonal matrix M is orthogonal.Hint: Write
M · M�1 = I = M · M t
and use matrix multiplication to reduce to showing that the transpose of an or-thogonal matrix is orthogonal. [MJG,311]

89
.
Exercise 87. a) Show that the transformation
(x, y) 7!�x, y�= (x, y) ·
✓d b
c a
◆
is a 1� 1, onto (linear) transformation of R2 as long as
(0.0.3)����d b
c a
���� 6= 0.
b) For the transformation in a), show that every line through the origin in(x, y)-space is sent to a line through the origin in
�x, y�-space. The slope t of the
line through (0, 0) and (x, y) is of course t = yx . What is the slope t of the line
through (0, 0) and�x, y�? Show that
(0.0.4) t =at+ b
ct+ d.

90
Exercise 88. Show that a linear fractional transformationR ! R
t 7! t =at+ b
ct+ d
is 1� 1 and onto. What is its inverse function? (Your answer should show that theinverse function is also a linear fractional transformation.)Hint: Algebraically solve for t in terms of t. Then graph
t =at+ b
ct+ d
in the (t, t)-plane. If c = 0 show that the graph is a straight line with non-zeroslope and
1 7! 1.
If c 6= 0, show that the graph has exactly one horizontal asymptote where t 7! 1and one vertical asymptote where t 7! 1.

91
Exercise 89. Show that the set of linear fractional transformations form agroup under the operation of composition of functions:
a) Show that the composition of two linear fractional transformations is againa linear fractional transformation.
b) Since composition of functions is always associative, compositions of linearfractional transformations are automatically associative.
c) Show that the identity map from R to R is a linear fractional transformation.d) Show that the inverse function of a linear fractional transformation is a linear
fractional transformation. That is, show that for any linear fractional transforma-tion f there is an (inverse) linear fractional transformation g such that
f � g = identity transformationg � f = identity transformation.

92
Exercise 90. a) Show that, for any three distinct fixed points t2, t3 and t4,the function of t given by the formula
t =t3 � t4
t3 � t2·t� t2
t� t4=
t� t2
t3 � t2÷ t� t4
t3 � t4
is a linear fractional transformation. That is, show that it is a function of the form(7.3.2) for which the condition (7.3.1) holds.
b) Show that the linear fractional transformation in a) takes t2 to 0, takes t3
to 1 and takes t4 to 1.

93
Exercise 91. Show that any linear fractional transformation (7.3.2) that leaves0, 1, and 1 fixed is the identity map.

94
Exercise 92. If for two ordered sets of points {sk} and {tk},(s1 : s2 : s3 : s4) = (t1 : t2 : t3 : t4) ,
explicitly define the linear fractional transformation f such that, for k = 1, . . . , 4,f (sk) = tk.
Hint: Begin withs� s2
s3 � s2÷ s� s4
s3 � s4=
t� t2
t3 � t2÷ t� t4
t3 � t4
and solve for s.
95
Exercise 93. a) Sketch the solution set in (x, y, z)-coordinates representingthe sphere
R2 = x
2 + y2 + z
2 = 22
of radius 2 in Euclidean three-space.b) Sketch the solution set in (x, y, z)-coordinates representing the sphere
R2 = x
2 + y2 + z
2 = 102
of radius 10 in Euclidean three-space.c) Sketch the solution set in (x, y, z)-coordinates representing the sphere
R2 = x
2 + y2 + z
2 = 10�2
of radius 10�1 in Euclidean three-space.

96
Exercise 94. a) Suppose we have functions(x (x, y, z) , y (x, y, z) , z (x, y, z))
wherex = f (t)
y = g (t)
z = h (t) .
State the Chain Rule (Theorem 1) fordx
dt=
dy
dt=
dz
dt= .
b) Rewrite the Chain Rule in matrix notation
�dxdt
dydt
dzdt
�=�
dxdt
dydt
dzdt
�·
0
@
1
A .

97
Exercise 95. Recalling that R is a positive constant, use (9.1.2) and the ChainRule to show that, for any path X (t) = (x (t) , y (t) , z (t)) in Euclidean 3-space,
dx
dt=
dx
dt
dy
dt=
dy
dt
dz
dt= R
dz
dt.

98
Exercise 96. Use matrix multiplication [DS,307] and Exercise 95 to show that
dX (t)
dt=
✓dX (t)
dt
◆0
@1 0 00 1 00 0 R
1
A
dX (t)
dt=
dX (t)
dt
!0
@1 0 00 1 00 0 R
�1
1
A .

99
Exercise 97. Use Lemma 3 to show that, if we have any two vectors in Eu-clidean three-space that are tangent to the R-sphere at some point on it, but thetwo vectors are given to us in (x, y, z)-coordinates as
V1 = (a1, b1, c1)
V2 = (a2, b2, c2) ,
then the area of the parallelogram spanned by those two vectors in Euclidean 3-space iss����
V1 •K V1 V2 •K V1
V1 •K V2 V2 •K V2
���� =
vuuut
������
✓(V1)(V2)
◆·
0
@1 0 00 1 00 0 K
�1
1
A ·�(V1)
t (V2)t �������.

100
Exercise 98. Starting from the equality (8.3.1) describing the transformationin Euclidean coordinates, explain why
�x y z
�=�x y z
�·
0
@1 0 00 1 00 0 R
1
A · M ·
0
@1 0 00 1 00 0 R
�1
1
A .

101
Exercise 99. Finish the matrix algebra computations just above to show thatthe condition that a transformation M in (x, y, z)-coordinates preserves distancesin Euclidean 3-space is the condition that
(0.0.5) M ·
0
@1 0 00 1 00 0 K
�1
1
A ·M t =
0
@1 0 00 1 00 0 K
�1
1
A .

102
Exercise 100. Check that (8.3.3) is the correct condition by showing that any3⇥ 3 matrix M that satisfies (8.3.3) also satisfies
((V ) ·M) •K ((V ) ·M) = V •K V
whereV = X2 �X1.
That is, the transformation given in (x, y, z)-coordinates by a matrix M that sat-isfies (8.3.3) preserves the K-dot product.

103
Exercise 101. For K 6= 0, show that the condition (9.1.2) on V is exactly thesame condition as
(x (t) , y (t) , z (t)) •K V = 0.

104
Exercise 102. a) Show that this last equality is always true if
(0.0.6) M ·
0
@1 0 00 1 00 0 K
�1
1
A ·M t =
0
@1 0 00 1 00 0 K
�1
1
A .
b) Show that, if M satisfies the identity (0.0.6), then the transformation�x, y, z
�=
(x, y, z) ·M takes the set of points (x, y, z) such that1 = K
�x2 + y
2�+ z
2,
to the set of points�x, y, z
�such that
1 = K�x2 + y
2�+ z
2.
That is, M gives a 1� 1, onto mapping of K-geometry to itself.Hint: For K 6= 0, write the equation 1 = K
�x2 + y
2�+ z
2 in matrix notation as
�x y z
�·
0
@1 0 00 1 00 0 K
�1
1
A ·
0
@x
y
z
1
A =1
K.

105
Exercise 103. For K 6= 0, show that the set of K-orthogonal matrices M forma group. That is, show that
a) the product of two K-orthogonal matrices is K-orthogonal,b) again cite the fact that matrix multiplication is associative,c) the identity matrix is K-orthogonal,d) the inverse matrix M
�1 of a K-orthogonal matrix M is K-orthogonalHint: Write
M ·M�1 = I = M ·
0
@1 0 00 1 00 0 K
�1
1
A ·M t ·
0
@1 0 00 1 00 0 K
1
A
and use matrix multiplication to reduce to showing that0
@1 0 00 1 00 0 K
�1
1
A ·M t ·
0
@1 0 00 1 00 0 K
1
A
is K-orthogonal.

106
Exercise 104. a) For the projection of the set (9.2.1) onto the z = 1 planewith center of projection O, write (xc, yc) as a function of (x, y, z).
b) For the projection of the set (10.2.1) onto the z = 1 plane with center ofprojection O, write (x, y, z) as a function of (xc, yc).

107
Exercise 105. Show that,a) when K > 0, the entire (xc, yc)-plane parametrizes the upper hemisphere,b) when K = 0, the (xc, yc)-plane coincides with the plane z = 1,c) when K < 0 the region is the interior of a circle of radius 1p
|K|in the
(xc, yc)-plane parametrizes the entire K-geometry.

108
Exercise 106. For the K-geometry coordinatesX (xc, yc) = (x (xc, yc) , y (xc, yc) , z (xc, yc))
use the formulas you derived in Exercise 104b) to calculate
dX =
✓@X
@xc
◆dxc +
✓@X
@yc
◆dyc.
That is, calculate the 2⇥ 3 matrix
Dc =
@x@xc
@y@xc
@z@xc
@x@yc
@y@yc
@z@yc
!=
0
@
⇣@X@xc
⌘
⇣@X@yc
⌘
1
A .
Hint: Use logarithmic differentiation:dx = d (rxc) = xcdr + rdxc
r�1
dx = xcdln (r) + dxc
and similarly for y and z since it is easier to compute r�1⇣
dxdt ,
dydt ,
dzdt
⌘than
⇣dxdt ,
dydt ,
dzdt
⌘.
Next use that2dln (r) = dln
�r2�= �dln
�K�x2c + y
2c
�+ 1�
= � 1
K (x2c + y2c ) + 1
d�K�x2c + y
2c
�+ 1�
= �r2K (2xcdxc + 2ycdyc) .

109
Exercise 107. Now suppose we have a path,(xc (t) , yc (t)) , a t b
in the (xc, yc)-plane, that is, in the central projection plane(xc, yc, 1) .
Use the formula you derived in Exercise 104b) to write the corresponding pathx (xc (t) , yc (t)) , y (xc (t) , yc (t)) , z (xc (t) , yc (t))
in the K-geometry space of (x, y, z) such that K�x2 + y
2�+ z
2 = 1.

110
Exercise 108. For the path (x (t) , y (t) , z (t)) in Exercise 107 lying on theset (9.2.1), use the Chain Rule (Theorem 1) from calculus of several variables tocompute ✓
dx
dt,dy
dt,dz
dt
◆=
✓dxc (t)
dt,dyc (t)
dt
◆·Dc.

111
Exercise 109. Compute the 2⇥ 2 matrix
Pc = Dc ·
0
@1 0 00 1 00 0 K
�1
1
A ·Dtc,
that that gives the K-dot product in (xc, yc)-coordinates. That is, use matrixmultiplication to show that
Pc =
✓r2�1� r
2Kx
2c
��r
4Kxcyc
�r4Kxcyc r
2�1� r
2Ky
2c
�◆.
Hint: For example@x
@xc= r
✓xc@ln (r)
@xc+ 1
◆= �r
3Kx
2c + r
@y
@xc= r
✓yc@ln (r)
@xc
◆= �r
3Kxcyc
@z
@xc= r
✓@ln (r)
@xc
◆= �r
3Kxc
so that ⇣@x@xc
,@y@xc
,@z@xc
⌘•K⇣
@x@xc
,@y@xc
,@z@xc
⌘
= r6K
2x4c � 2r4Kx
2c + r
2 + r6K
2x2cy
2c + r
6Kx
2c
=�r6K
2x4c + r
6K
2x2cy
2c + r
6Kx
2c
�� 2r4Kx
2c + r
2
= r4Kx
2c � 2r4Kx
2c + r
2 = r2�1� r
2Kx
2c
�.

112
Exercise 110. Show that, when K = 0, the formulas for the dot product •care exactly the ordinary formulas for (flat) plane geometry.

113
Exercise 111. Explain why a curve in K-geometry cut out by a plane through(0, 0, 0) in (x, y, z)-coordinates corresponds to a line in the (xc, yc)-coordinate plane.Hint: See (9.2.2) relating (x, y, z)-coordinates with (xc, yc)-coordinates.

114
Exercise 112. Using Lemma 3 and Exercise 97 show that
a
dX
dxc,dX
dyc
!2
=
�����
dXdxc
• dXdxc
dXdyc
• dXdxc
dXdxc
• dXdyc
dXdyc
• dXdyc
�����
=
�����
dXdxc
•K dXdxc
dXdyc
•K dXdxc
dXdxc
•K dXdyc
dXdyc
•K dXdyc
�����
=
������
0
@
⇣dXdxc
⌘
⇣dXdyc
⌘
1
A
0
@1 0 00 1 00 0 K
�1
1
A⇣ ⇣
dXdxc
⌘t ⇣dXdyc
⌘t ⌘������
= |Pc| .

115
Exercise 113. Use Exercise 109 to show that
a
dX
dxc,dX
dyc
!2
= r6 =
1
(K (x2c + y2c ) + 1)3
as a function of (xc, yc).Hint: Notice that the matrix Dc in Exercise 106 is simply the 2⇥ 3 matrix whoserows are the vectors dX
dxcand dX
dyc. So referring to Exercise 109, we know that
dXdxc
• dXdxc
dXdyc
• dXdxc
dXdxc
• dXdyc
dXdyc
• dXdyc
!=
✓r2�1� r
2Kx
2c
��r
4Kxcyc
�r4Kxcyc r
2�1� r
2Ky
2c
�◆.

116
Exercise 114. a) For the projection of the set (9.2.1) onto the z = 1 planewith center of projection S, write (xs, ys) as a function of (x, y, z).
b) For the projection of the set (9.2.1) onto the z = 1 plane with center ofprojection S, write (x, y, z) as a function of (xs, ys).

117
Exercise 115. Suppose we have a pathX (xs (t) , ys (t)) = (x (xs (t) , ys (t)) , y (xs (t) , ys (t)) , z (xs (t) , ys (t)))
lying on the set (9.2.1) given in terms of its projection (xs (t) , ys (t)) in the planez = 1. Use the formula you derived in Exercise 114b) and the Chain Rule (Theorem1) to find the 2⇥ 3 matrix
Ds =
0
@
⇣@X@xs
⌘
⇣@X@ys
⌘
1
A
such that ✓dx
dt,dy
dt,dz
dt
◆=
✓dxs (t)
dt,dys (t)
dt
◆·Ds.
Hint: Use logarithmic differentiationdx = d (⇢xs) = xsd⇢+ ⇢dxs
⇢�1
dx = xsdln (⇢) + dxs
and similarly for y. Also
dln (⇢) = �dln
✓K
4
�x2s + y
2s
�+ 1
◆
= � 1K4 (x2
s + y2s) + 1d
✓K
4
�x2s + y
2s
�+ 1
◆
= �⇢K4(2xsdxs + 2ysdys) .

118
Exercise 116. Use matrix multiplication to compute the 2⇥ 2 matrix
Ps = Ds ·
0
@1 0 00 1 00 0 K
�1
1
A ·Dts,
that is, to compute the K-dot product in (xs, ys)-coordinates. (You may be sur-prised at the answer! It is quite simple and only involves the quantity ⇢.)

119
Exercise 117. Write the formula for the K-dot product (xs, ys)-coordinateswhen K = 0. Does it look familiar?

120
Exercise 118. Suppose we intersect K-geometry (10.4.1) with a planeax+ by + z = 0.
a) Show that the equation for the resulting path in stereographic projectioncoordinates is
✓xs �
2a
K
◆2
+
✓ys �
2b
K
◆2
=4�K + a
2 + b2�
K2.
Hint: Use formula (9.3.1) to relate (x, y, z)-coordinates with (xs, ys)-coordinates.b) What is the equation for the resulting path in stereographic projection co-
ordinates if we intersect the K-geometry with a plane given byax+ by = 0,
that is, a plane containing the z-axis?

121
Exercise 119. As in Lemma 3 show that
a
dX
dxs,dX
dys
!2
=
�����
dXdxs
• dXdxs
dXdys
• dXdxs
dXdxs
• dXdys
dXdys
• dXdys
�����
=
�����
dXdxs
•K dXdxs
dXdys
•K dXdxs
dXdxs
•K dXdys
dXdys
•K dXdys
����� .

122
Exercise 120. Use Exercise 116 to show that
a
dX
dxs,dX
dys
!2
= ⇢4 =
1�K4 (x2
s + y2s) + 1�4 .

123
Exercise 121. Do the algebra to write the explicit formulas for(xs (xc, yc) , ys (xc, yc))
and(xc (xs, ys) , yc (xs, ys)) .

124
Exercise 122. a) Show that the slopes of the asymptotes to the hyperbola(9.4.4) are the limits as x goes to ±1 are the slopes of the lines through (0, 0) andthe point (x, z) on the hyperbola.
b) Show that the slopes of the asymptotes to the hyperbola (9.4.4) are thelimits as x goes to ±1 of the slopes of the lines through (0,�1) and the point(x, z) on the hyperbola.
c) Use b) to compute the radius of the disk around (0, 0) in the (xs, ys)-planethat captures all the points (x, y, z) of K-geometry under stereographic projection.

125
Exercise 123. (SG) Show that the transformation (10.1.3) takes the R-sphereto itself if
M · M t = I
where I is the 3 ⇥ 3 identity matrix. (Recall that a matrix M satisfying thiscondition is called an orthogonal matrix.)

126
Exercise 124. (SG) Referring to Definition 19, show that the transformations�x, y, z
�= (x, y, z) · M
and �x, y, z
�= (x, y, z) ·M
give the same rigid motion of the R-sphere if
M =
0
@1 0 00 1 00 0 R
1
A · M ·
0
@1 0 00 1 00 0 R
�1
1
A .

127
Exercise 125. (SG) Show that the matrix0
@cos# sin# 0� sin# cos# 0
0 0 1
1
A
is both orthogonal and K-orthogonal and gives the same transformation of theEuclidean R-sphere. Describe geometrically what this transformation is doing tothe R-sphere.

128
Exercise 126. (SG) Show that the matrix
M =
0
@cos' 0 sin'0 1 0
� sin' 0 cos'
1
A
is orthogonal and that the matrix
M =
0
@cos' 0 R
�1· sin'0 1 0
�R· sin' 0 cos'
1
A
is the K-orthogonal matrix describing the same transformation of the R-sphere.Describe geometrically what this transformation is doing to the R-sphere.

129
Exercise 127. (SG) Write an explicit K-rigid motion of the type
M1 =
0
@cos# sin# 0� sin# cos# 0
0 0 1
1
A
that takes the point X0 to a point X1 = (x1, 0, z0).Hint: Start from the identity
�y0px20 + y20
· x0 +x0p
x20 + y20
· y0 = 0
and the desired identitysin#·x0 + cos#·y0 = 0
and conclude that there is a #0 so that
cos#0 =x0p
x20 + y20
sin#0 =�y0px20 + y20
.

130
Exercise 128. (SG) Write an explicit K-rigid motion of the type
M2 =
0
@cos' 0 R
�1· sin'0 1 0
�R· sin' 0 cos'
1
A
that takes the point X1 = (x1, 0, z0) to N = (0, 0, 1).

131
Exercise 129. (SG) Write an explicit K-rigid motion of the type
M3 =
0
@cos#0 sin#0 0� sin#0 cos#0 0
0 0 1
1
A
that takes V2 to the vector✓q
a22 + b22, 0, 0
◆=⇣p
V2 •K V2, 0, 0⌘.
Why does the transformation given by M3 leave the North Pole N fixed?

132
Exercise 130. (SG) Explain in words why the K-rigid motion�x, y, z
�= (x, y, z) · (M1 ·M2 ·M3)
constructed over the last couple of sections takes the point X0 to N and the tangentvector V0 to
�pV0 •K V0, 0, 0
�.

133
Exercise 131. (SG) Explain in words why the K-rigid motion given by M ·(M 0)�1 takes (X0, V0) to (X 0
0, V00).

134
Exercise 132. (SG) Show that these spherical coordinates do actually param-etrize the R-sphere, that is, that
K
⇣x (�, ⌧)2 + y (�, ⌧)2
⌘+ z (�, ⌧)2 ⌘ 1
for all (�, ⌧).

135
Exercise 133. (SG) a) Referring to (11.3.1) compute the 2⇥ 3 matrix
Dsph =
✓@x@�
@y@�
@z@�
@x@⌧
@y@⌧
@z@⌧
◆.
b) Show that, if a path in K-geometry is given by a path (� (t) , ⌧ (t)) in the(�, ⌧)-plane, ✓
dx
dt,dy
dt,dz
dt
◆=
✓d�
dt,d⌧
dt
◆·Dsph.
c) For two paths in K-geometry given by paths (�1 (t) , ⌧1 (t)) and (�2 (t) , ⌧2 (t))in the (�, ⌧)-plane, use a) and b) to show that
✓dx1
dt,dy1
dt,dz1
dt
◆·✓dx2
dt,dy2
dt,dz2
dt
◆t
=
✓dx1
dt,dy1
dt,dz1
dt
◆·
0
@1 0 00 1 00 0 K
�1
1
A ·✓dx2
dt,dy2
dt,dz2
dt
◆t
=
✓d�1
dt,d⌧1
dt
◆·✓
K�1 00 K
�1sin2�
◆·✓d�2
dt,d⌧2
dt
◆t
d) Explain why the formula✓d�1
dt,d⌧1
dt
◆•sph
✓d�2
dt,d⌧2
dt
◆=
✓d�1
dt,d⌧1
dt
◆·✓
K�1 00 K
�1sin2�
◆·✓d�2
dt,d⌧2
dt
◆t
allows us to compute the ordinary Euclidean dot product of two tangent vectorsto the R-sphere in Euclidean space if we just know the values of the vectors in the(�, ⌧)-plane that correspond to the two tangent vectors.

136
Exercise 134. (SG) Show that the length L of any path on the R-sphere givenby
(�, ⌧ (�)) , 0 � "
with⌧ (0) = 0.
and⌧ (") = 0
is given by the formula
L =
Z "
0
s�1 d⌧
d�
�·✓
1 00 sin2 �
◆·�1 d⌧
d�
�td�.
Hint: Notice that the Exercise makes the first coordinate � the parameter for thecurve, that is � (t) = t,
d�dt ⌘ 1.

137
Exercise 135. Show that central projection of a point on the R-sphere in(x, y, z)-space to the plane z = R is the same as central projection of the corre-sponding point in (x, y, z)-coordinates to the plane z = 1.Hint: Recall (9.2.2) and write the corresponding relation r (xc, yc, R) = (x, y, z) in(x, y, z)-coordinates. Conclude that r = r. (Why?)

138
Exercise 136. (SG) Show that lines (i.e. shortest paths in SG) correspondunder central projection to straight lines in the (xc, yc)-coordinates.Hint: See Exercise 111 and Theorem 15. Or just write the equation for a line in(xc, yc)-coordinates and substitute (9.4.2). Then reverse the process.

139
Exercise 137. (SG) Explain why we know from an Exercise in Part 5 that, ifa region G on the R-sphere is parametrized by a region Gc in (xc, yc)-coordinates,then the area A of G is given by the formula
A =
Z
Gc
�K�x2c + y
2c
�+ 1��3/2
dxcdyc.

140
Exercise 138. (SG) a) Compute the stereographic projection of a point onthe R-sphere in (x, y, z)-space to the plane z = R.
b) Show that the coordinates (xs, ys) of the stereographic projection of a pointon the R-sphere in (x, y, z)-space to the plane z = R are the same as the coordi-nates (xs, ys) of the stereographic projection of the corresponding point in (x, y, z)-coordinates to the plane z = 1.Hint: Reduce to showing that
R
✓2x
z +R,
2y
z +R
◆=
✓2x
z + 1,
2y
z + 1
◆.

141
Exercise 139. (SG) a) Show that stereographic projection is conformal, thatis, that the angle between two paths through a point on the R-sphere in (x, y, z)-space is the same as the usual (Euclidean) angle between the corresponding twopaths through the corresponding point in the (xs, ys)-plane.Hint: See Subsection 9.3.3.
b) Draw a picture of an angle between two paths through a point on the Eu-clidean R-sphere and the stereographic projection of that angle onto the planez = R. Try to give an intuitive geometric explanation for why it should have thesame measure as the original angle.Hint: Let L denote the line through (x, y, z) and (xs, ys, R). Compare the anglebetween L and the tangent plane to the R-sphere at (x, y, z) to the angle betweenL and the plane z = R. (In fact, by rotational symmetry, you can assume thaty = ys = 0.)

142
Exercise 140. a) Use Exercise 118b) to compute the equations for the othertwo sides of Ts.
b) In the (xs, ys)-plane, draw Ts as accurately as you can when K = 4, thenwhen K = 1
4 , then finally when K = 0, that is, for the sphere of infinite radius.c) Use Subsection 5.5.2 and the fact that stereographic projection is conformal
to compute the area of T in all cases in b).Hint: Your job will be easier if you notice that the ys-axis divides Ts into twocongruent isosceles triangles. Then the only calculation you will need to do is tocalculate the radian measure of the angle at the vertex (xs, ys) = (2, 0) of Ts.(Why?) To calculate the interior angle, calculate dys
dxsby implicit differentiation of
the first quadrant equation in a), then take ⇡ � arctan⇣
dys
dxs
⌘radians.

143
Exercise 141. Explain why we know from an Exercise in Part 5 that in all ofthe cases in Exercise 140 the area of the spherical triangle T is also given by theformula Z
Ts
1�1 + K
4 (x2s + y2s)
�2 dxsdys.

144
Exercise 142. Suppose that a vector V emanates from (0, 0, 0) in (x, y, z)-space.
a) Show that V •K V = 0 if and only if V points in a direction of the light cone.b) Show that V •K V < 0 if and only if V points in a direction inside the light
cone.c) Show that V •K V > 0 if and only if V points in a direction outside the light
cone.Hint: Use that the (Euclidean) angle # that the light cone makes with the planez = 0 is given by taking any point (x, y, z) on the light cone with z > 0 andcomputing
tan# =zp
x2 + y2= |K|1/2 .

145
Exercise 143. (HG) Show that the matrix0
@cos# sin# 0� sin# cos# 0
0 0 1
1
A
is K-orthogonal. Describe geometrically what this transformation is doing to theK-geometry.

146
Exercise 144. (HG) Show that the matrix0
@cosh' 0 |K|1/2 · sinh'
0 1 0
|K|�1/2 · sinh' 0 cosh'
1
A
is K-orthogonal. Describe geometrically what this transformation is doing to thethe K-geometry.

147
Exercise 145. (HG) Write an explicit K-rigid motion
M1 =
0
@cos# sin# 0� sin# cos# 0
0 0 1
1
A
that takes the point X0 to a point X1 = (x1, 0, z0).

148
Exercise 146. (HG) Write an explicit K-rigid motion
M2 =
0
@cosh' 0 |K|1/2 · sinh'
0 1 0
|K|�1/2 · sinh' 0 cosh'
1
A
that takes the point X1 = (x1, 0, z0) to N = (0, 0, 1).Hint: Notice that
Kx21 + z
20 = 1 = �
⇣� |K|1/2 ·x1
⌘2+ z
20 .
So there is a ' withcosh' = z0
andsinh' = � |K|1/2 ·x1.
Try that ' in M2.

149
Exercise 147. (HG) Write an explicit K-rigid motion
M3 =
0
@cos#0 sin#0 0� sin#0 cos#0 0
0 0 1
1
A
that takes V2 to the vector✓q
a22 + b22, 0, 0
◆=⇣p
V2 •K V2, 0, 0⌘.
Why does the transformation given by M3 leave the North Pole N fixed?

150
Exercise 148. (HG) Explain why the K-rigid motion�x, y, z
�= (x, y, z) · (M1 ·M2 ·M2)
constructed over the last couple of sections takes the point X0 to N and the tangentvector V0 to
�pV0 •K V0, 0, 0
�

151
Exercise 149. (HG) Explain why the K-rigid motion given by
M · (M 0)�1
takes (X0, V0) to (X 00, V
00).

152
Exercise 150. (HG) Show that these hyperbolic coordinates do actually pa-rametrize the K-geometry, that is, that
K
⇣x (�, ⌧)2 + y (�, ⌧)2
⌘+ z (�, ⌧)2 ⌘ 1
for all (�, ⌧).

153
Exercise 151. (HG) a) Compute the 2⇥ 3 matrix Dhyp such that✓dx
dt,dy
dt,dz
dt
◆=
✓d�
dt,d⌧
dt
◆·Dhyp
when a path in K-geometry is given by a path in the (�, ⌧)-plane.Hint: By the Chain Rule from several variable calculus
Dhyp =
✓dxd�
dyd�
dzd�
dxd⌧
dyd⌧
dzd⌧
◆.
b) Use a) to compute the K-dot product in (�, ⌧)-coordinates, namely✓d�1
dt,d⌧1
dt
◆•hyp
✓d�2
dt,d⌧2
dt
◆=
✓dx1
dt,dy1
dt,dz1
dt
◆•K✓dx2
dt,dy2
dt,dz2
dt
◆
=
✓dx1
dt,dy1
dt,dz1
dt
◆·
0
@1 0 00 1 00 0 K
�1
1
A ·✓dx2
dt,dy2
dt,dz2
dt
◆t
=
✓d�1
dt,d⌧1
dt
◆·Dhyp ·
0
@1 0 00 1 00 0 K
�1
1
A ·Dthyp ·
✓d�1
dt,d⌧1
dt
◆t
.

154
Exercise 152. (HG) Show that the length L of any path in our K-geometryis given by
(�, ⌧ (�)) , 0 � "
with⌧ (0) = 0.
and⌧ (") = 0
is given by the formula
L = |K|�1/2Z "
0
s✓1,
d⌧
d�
◆·✓
1 00 sinh2 �
◆·✓1,
d⌧
d�
◆t
d�.

155
Exercise 153. (HG) Explain why lines in HG extend infinitely in each direc-tion.Hint: There is a K-rigid motion that takes any two points to (0, 0, 1) and
⇣|K|�1/2 · sinh ", 0, cosh "
⌘
for some " > 0 . Why does that mean that the K-distance between the two pointsis equal to |K|�1/2 ·"?

156
Exercise 154. a) Use the formula (9.2.4) for K-rigid motions to check thatfor K-rigid motions
�x y z
�0
@1
1K
�1
1
A
0
@x
y
z
1
A = 0
whenever�x y z
�0
@1
1K
�1
1
A
0
@x
y
z
1
A = 0
and vice versa.b) Recall that m13x + m23y + m33z = z for the K-rigid motion given by the
matrix M in (x, y, z)-coordinates. If K < 0, use a) to explain why (x, y, z) lies onthe light cone if and only if
�x, y, z
�lies on the light cone.
c) Usez = m13x+m23y +m33z
to conclude that the plane given bym13x+m23y +m33z = 0
intersects the light cone only at (0, 0, 0).d) Show that the line given by
m13xc +m23yc +m33 = 0
never intersects the edge of the universe in central projection coordinates (nor instereographic projection coordinates), no matter the (negative) value of K.

157
Exercise 155. (HG) a) Explain why the K-line y = 0 is given by the xc-axisand the North Pole N is given by (xc, yc) = (0, 0).
b) Explain why the point⇣|K|�1/2 ·sinh", 0, cosh"
⌘in the K-geometry is given
by the point
(xc, yc) =
✓|K|�1/2 ·
e" � e
�"
e" + e�", 0
◆.
c) Explain why the K-distance between (xc, yc) = (0, 0) and (xc, yc) =⇣|K|�1/2 · e
"�e�"
e"+e�" , 0⌘
is |K|�1/2·".Hint: Convert the statement to a statement about the distance between two pointsin (x, y, z)-coordinates, a distance that we have computed previously.

158
Exercise 156. (HG) Use (xc, yc)-coordinates to show that HG satisfies thefour Euclidean postulates E1, E2, E3, and E4. Thus hyperbolic geometry is aNeutral Geometry (NG).

159
Exercise 157. Explain why there is a K-rigid motion Mc that takes any threepoints P
0, R0 and Q
0 in order along the edge of the universe to any other threepoints P
00, R00 and Q00 in order along the edge of the universe.
Hint: Use that the set of K-rigid motions form a group under the compositionoperation.

160
Exercise 158. (HG) Explain why the above discussion implies that the angles\P 0
A0R
0 and \Q0A
0R
0 must both be K-right angles, that is, their K-measures musteach be 90�. So the line segments P 0Q0 and A0R0 are K-perpendicular. [MJG,238-239]
Hint: You may need to use the fact that, since there is a K-rigid motion thatinterchanges
⇣� |K|�1/2
, 0⌘
and⇣|K|�1/2
, 0⌘
and leaves (0, 0) fixed, the xc-axisand the yc-axis are K-perpendicular.

161
Exercise 159. (HG) Use the previous Exercise and the fact that A0 can be
any point along the chord P 0Q0 in the figure above to explain why the Klein modelis not conformal, that is, it does not faithfully represent the measure of angles inHG.

162
Exercise 160. Use (xc, yc)-coordinates to show that HG does not satisfy Eu-clid’s postulate E5. That is, through a point not on a line, it is not true that therepasses a unique parallel (i.e. non-intersecting) line.

163
Exercise 161. (HG) a) Draw a picture of the Klein K-disk, the edge of theuniverse, and the four points on the xc-axis.
b) Show that✓0 : � |K|�1/2 : |K|�1/2 ·
e" � e
�"
e" + e�": |K|�1/2
◆=
✓0 : �1 :
e" � e
�"
e" + e�": 1
◆.
In particular, notice that the computation doesn’t depend on K.c) Show that ✓
0 : �1 :e" � e
�"
e" + e�": 1
◆= e
�2".

164
Exercise 162. For K = �1, calculate the K-distance between the two pointsgiven in (xc, yc)-coordinates by (0, 0) and (1/2, 0).

165
Exercise 163. Show thatAK (↵) = |K|�1 (⇡ � ↵) .
Hint: Use the substitutionxc = |K|1/2 xc
yc = |K|1/2 ycto reduce the computation to the computation in the case that |K| = 1. Then usepolar coordinates to get
A�1 (↵) =
Z #=�
#=��
Z r= cos �cos#
r=0
1
(1� r2)3/2r·dr
!d#.
Then do the substitutionu = 1� r
2
du = �2rdr
to computeR r= cos �
cos#
r=01
(1�r2)3/2r·dr. In the final step use the substitution
t = sin#
to reduce to an integral of the formZ
aq1�
�ta
�2 dt.

166
Exercise 164. (HG) a) Show that stereographic projection is conformal, thatis, that the measure of K-angles between K-lines on K-geometry is just the ordi-nary Euclidean measure of angles formed by their (usually circular) stereographicprojections.Hint: See Subsection 9.3.3.
b) For K = �1, construct the K-line in (xs, ys)-coordinates that meets theK-line
(xs � 2)2 + (ys � 2)2 = 4
perpendicularly in the point�2�
p2, 2�
p2�.

167
Exercise 165. Show that in K-geometry for any K, the between two tangentvectors at the North Pole is the same as the ordinary Euclidean angles betweenthe two corresponding tangent vectors in the (xc, yc)-plane and that angle is alsothe same as the ordinary Euclidean angles between the two corresponding tangentvectors in the (xs, ys)-plane.

168
Exercise 166. (HG) a) Use Exercise 118b) to compute the equations for theother two sides of Ts.
b) In the (xs, ys)-plane, draw Ts as accurately as you can when K = � 14 , then
when K = �1.

169
Exercise 167. Draw the ↵-lune in Exercise 163 in (xs, ys)-coordinates.

170
Exercise 168. (HG) Use Exercise 163 to show that in the above picture theK-area that lies in the union of the ↵-lune and the �-lune but does not lie in the(↵+ �)- lune is |K|�1
⇡.

171
Exercise 169. Move the vertex of the ↵-lune in Exercise 167 to any otherpoint of K-geometry by a rigid motion in (xs, ys)-coordinates. Draw the resultingfigure (that we will continue to call an ↵-lune).

172
Exercise 170. a) (HG) Use Exercise 157 to show that the area of (the interiorof) any infinite triangle has K-area
|K|�1 ·⇡.For example, if K = �1 we have
b) Use a) to give a formula for the K-area of any infinite n-gon in HG, thatis, a figure described by a set of n disjoint K-lines that is the limit of a family offinite n-gons, all of whose vertices have gone to infinity. In particular, what is thearea of any infinite hexagon?
Hint: Divide the infinite n-gon into infinite triangles.

173
Exercise 171. HG) a) Use the picture
(and remarks just above to explain why the K-area of the hyperbolic triangle is
|K|�1 · (⇡ � (↵+ � + �)) .
Hint: Locate ↵-lunes, two �-lunes and two �-lunes in the picture and notice thatthey cover the hyperbolic triangle three times.b) Use a) to give a formula for the K-area of a hyperbolic n-gon.