Embed Size (px)
Citation preview

C*-ALGEBRAS OF THE PLANAR CRYSTAL GROUPS
AND THEIR IRREDUCIBLE *-REPRESENTATIONS
A Thesis
Submitted to the Faculty of Graduate Studies and Research
in Partial Fulfillment of the Requirements
for the Degree of
Master of Science
in the
Department of Mathematics
University of Saskatchewan
Saskatoon
by
Eric M. Pohorecky
August, 1990
@1990 E. M. Pohorecky

In presenting this thesis in partial fulfilment of the requirements for a Postgraduate degree from the
University of Saskatchewan, I agree that the Libraries of this University may make it freely available for
inspection. I further agree that permission for copying of this thesis in any manner, in whole or in part, for
scholarly purposes may be granted by the professor or professors who supervised my thesis work or, in their
absence, by the Head of the Department or the Dean of the College in which my thesis work was done. It is
understood that any copying or publication or use of this thesis or parts thereof for financial gain shall not
be allowed without my written permission. It is also understood that due recognition shall be given to me
and to the University of Saskatchewan in any scholarly use which may be made of any material in my thesis.
Requests for permission to copy or to make other use of material in this thesis in whole or part should
be addressed to:
Head of the Department of Mathematics
University of Saskatchewan
Saskatoon, Saskatchewan S7N OWO

I would like to express my gratitude to Professor Keith Taylor for the invaluable assistance he provided
in the preparation of this thesis. I would also like to thank the Natural Sciences and Engineering Research
Council for their financial assistance.
Since this page is mine and not read by anyone, except, perhaps, by my mother and wife, I will now
thank miscellaneous people. Thanks to my wife Leslie Jean Walter for her understanding during the past
months: it has been a long summer. Thanks, of course, to Margaret Pohorecky (mom) without whom
nothing would be possible. Wally Polsom took hold of the rudder just as I was sinking away and kept me
afloat (with coffee) during that 40th hour; Art Raymond and Manuel Cabral provided invaluable advice and
lent me a darn fine pair of scissors for my cutting and pasting: thanks to all.
11
z R c T
Page Symbol
5 L1 (G), ll·lh 4 L2(S), ll·ll2 15 vx)(A), (L1(A))# 3 1l 3 K,l.
3 '}{,(f)K,
4 8(1t), 8(11,, K,) 4 T* 5 u 7 p 7 P.LQ 7 P$.Q 8 P- Q (in A) 6 A 8 A' 12 11",ll 12 11"-u
12 .A 5 f*g 5 AG
6 Co(X) 10 B 10 Bx 11 r(B), ro(B) 50 r~(E) 14 c•(G) 14 Ct(G) 14 11·11· 15 A 15 j 15 A( A) 48
A D Mn(Co(A))
51 Da 18 ISOM(En) 18 TRANS( En)
List of Notation
Integers Reals Complex 1-torus (z E C, lzl = 1)
Description
L1 (G)-space L2 ( S)-space continuous linear dual Hilbert space orthogonality Hilbert direct sum bounded operators Hilbert adjoint unitary operator projection in 8(11,) two orthogonal projections subprojection, minimal projection two equivalent projections C*-algebra commutant of C* -algebra *-representation, irreducible representation two equivalent representations structure set of a C*-algebra convolution left-regular representation C*-algebra of functions bundle, C*-bundle fibre in a bundle sections of a bundle equivariant sections group C* -Algebra reduced group C*-Algebra C*-norm on L1 (G) Pontryagin dual of abelian group fourier transform on L1(A) fourier algebra
fixed point algebra isotropy subgroup group of Euclidean isometries subgroup of translations
TABLE OF CONTENTS
Chapter 1: Introduction 1
Chapter 2: C*-Algebras and C*-Bundles 3
I. Hilbert spaces and C*-Algebras 3
1. Hilbert spaces 3
2. Bounded operators on Hilbert spaces 4
3. C*-algebras 5
4. Projections in B(H) 7
II. C*-Bundles 9
Chapter 3: Representation Theory 12
I. *-Representations of C*-algebras 12
II. Group C*-algebras 13
1. General locally compact groups 14
2. Abelian locally compact groups 14
III. Irreducible representations of C*-bundles 17
Chapter 4: Crystallographic Groups and the 17 planar crystal groups 18
I. Crystal groups 18
II. The 17 planar crystal groups 20
1. Preliminaries 20
2. Descriptions 23
Chapter 5: The C*-Algebra of a Group with Abelian Normal Subgroup of Finite Index 39
I. The group C*-algebra C*(G) 39
II. The identification of r o(E) and C*(G) 49
1. The tilde bundle E 49
2. r o(E) ~ C*(G) 56
Chapter 6: The C*-Algebras of Planar Crystal Groups and their Irreducible *-Representations 58
References
I. Description of A 58
II. D-action on A and A, and description of C*(G) 59
III. Deter~nation and description of A/ D
IV. Alternate description of C*(G)
V. Irreducible representations of C*(G)
60
61
61
63
Apoendix A
lll

Chapter 1 Introduction
The main result of this thesis is the explicit construction of the group C*-Algebra C*(G) for
each of the seventeen planar crystal groups G. A secondary result is the explicit description of all
the irreducible *-representations of these C*-Algebras. Two further applications are described in
the concluding paragraph below.
The study of generalized representation theory arose from the study of unitary representations
of groups. Quantum theory, for example, is where representation theory of groups finds its most
important physical application ([6], p.29). Moving up to the general representation theory on *
algebras can often solve a problem which yields a solution in the group case by restriction. Thus,
one finds, for example, titles such as "Operator Algebras and Quantum Statistical Mechanics", and
there is a strong connection between representations of groups and *-representations of *-algebras.
Chapter two is basic in nature. The definitions and results for Hilbert spaces, C*-Algebras, and
C*-Bundles are laid down. The major result is the Gelfand-Neumark theorem which says, basically,
that C*-Algebras are not more general than, and, in fact, are subsumed by, operator *-algebras on
Hilbert spaces. A large portion of the chapter is devoted to finite-dimensional C*-Algebras since
this case is required in later chapters for finding the structure set of C* (G) .
Chapter three introduces representations of *-algebras. One of the long range objectives of rep
resentation theory is to classify all the *-representations of a given *-algebra ([5], p.416). Any
*-algebra gives rise to a C*-algebra, and the *-representations of each have a natural one to one
correspondence. So, "from a representation theoretic viewpoint", *-algebras are not more general
than C*-algebras. In the finite dimensional case, a C*-Algebra has a corresponding finite condition
on its irreducible representations.
Chapter three also gives a development for the result that the group C*-Algebra for a locally
compact abelian group A is the space C 0 (A) for the pontryagin dual A. This result is extended in
chapter five (see [14]) to a general locally compact group G that has an abelian normal subgroup of
finite index. In fact, C* (G) is tied to a wonderfully explicit formulation via [14].
Chapter five also ties together C*(G) with the section C*-Algebra of a C*-bundle. Evans' ([3])
analysis of compact symmetry groups is modified for this result. Then, with this bundle identifica
tion, the irreducible representations of C* (G) are readily accessible in the case of a crystal group's
C*-Algebra.
1
Chapter four essentially lists the planar crystal groups for use in the sequel. Symmetry, in general,
is one of the most fascinating areas in the known universe and finds its expression in various forms.
Hilbert's eighteenth problem, which deals with bounded symmetry and was solved by Bieberbach
around 1910, shows the restrictive nature of symmetry. Yet symmetry, balance and uniformity seem
to be universal characteristics of all systems, in some sense.
In chapter six, this thesis concretely carries out part of the program of representation theory. The
C*-Algebra C*(G) is constructed for each of the seventeen planar crystal groups G. For each C*(G),
the irreducible *-representation set is described. These results form an important set of examples of
non-trivial, non-commutative C*-Algebras of infinite dimension and also provide interesting exam
ples of the structure sets IRR(C*(G)). The methods employed are not restricted to planar groups,
but could be applied to any crystal group (although the computation time required would grow quite
quickly).
A few concluding remarks will now be made. The structure set and the description of C* (G)
lend themselves quite readily to calculation of the topology on the structure space, which is a further
objective of representation theory. Lastly, there is a natural embedding of the group G itself into
L 1( G)- by point-mass functions x ~ flz- and then the unitary representations of G can be deduced
from the structure set of C* (G) . So there are at least these two further applications which could
be carried out from the information provided in this thesis.
2
Chapter 2 C*-Algebras and C*-Bundles
Complex Hilbert spaces are extremely nice and "square" geometric objects. It turns out that
C*-Algebras and Hilbert spaces are intimately connected by the Gelfand-Neumark Theorem. The
first few sections of this chapter deal with Hilbert spaces and C*-Algebras and list results which are
needed in the sequel. The last section sets up preliminary notation and conventions for C*-bundles.
! Hilbert Spaces and C*-algebras.
The bulk of the material in this section comes from (9]. The Hilbert space section is gleaned from
[9], 2.1.
1.1 Hilbert Spaces.
A positive definite inner product on a (complex) vector space 1{, is a map < ·, · >: 1{, x 1{, -+ C
that is sesquilinear and positive definite. That is,
(1) <ax+ by, z >=a< x, z > +b < y, z >for all a, bE C and x, y, z E 1£,
(2) < y,x >= < x,y >for all x,y E ?i,
(3) < x, x >~ 0 for all x E ?i, and < x, x >= 0 iff x = 0.
In this case, the inner product defines a norm on 1£: llxll =< x, x > ~. A positive definite inner
product space which is complete with respect to the norm defined by the inner product is called a
Hilbert space. So any Hilbert space is a Banach space (that is, a complete normed linear space).
Orthogonality plays a major role in the study of Hilbert spaces. Let 1i be a Hilbert space. Two
elements x, y E 1i are called orthogonal if< x, y >= 0. Two subsets X, Y ~ 1i are called orthogonal
if< x, y >= 0 for each pair x EX andy E Y. The set y.L is defined by y.L := {x E 1i 1:< x, y >=
0 \lyE Y} which turns out to be a closed subspace of 1i . It is routine to verify that if X ~ Y ~ 1i
then y.L ~ X.L and that Y n y.L = {0}. So ?i.L = 1i n ?i.L = {0}. If Y is a closed subspace of 1i
then Y .L is called the orthogonal complement of Y. One has the following important and elementary
result for a Hilbert space 1i : given any closed subspace Y, then 1i ~ Y $ Y .L. It then makes sense
to define the Hilbert direct sum of two Hilbert spaces 1i and JC by usual component-wise operations
and norm determined by ll(x, Y)II~$K := llxll~ + IIYII~ for (x, y) in 1i $ IC.
An orthogonal subset B of a Hilbert space is just a subset of 1i whose elements are pairwise
orthogonal. As usual, an orthonormal set means an orthogonal set each of whose elements have
unit-norm (that is, !lxll = 1).
3
THEOREM ([9], 2.2.10). Every Hilbert space has an orthonormal basis. Any orthonormal set in a
Hilbert space 1l is contained in some orthonormal basis of 1(, . Finally, any two orthonormal bases
for 1l have the same cardinality.
Thus, one can define the dimension of a Hilbert space to be the cardinality of any one of its
orthonormal bases, since they all share the same cardinality. In fact, there is, in essence, only one
Hilbert space of any given dimension.
THEOREM ([9], 2.2.12). Two Hilbert space are isomorphic iff they have the same dimension.
So Hilbert spaces are determined (up to isomorphism) by their dimension. Thus, any finite dimen
sional Hilbert space of dimension n is isomorphic to C" - the space of all complex n-tuples with
inner product defined by < (x1, ... , Xn), (y1, ... , Yn) >:= L:~ XiYi, which yields the (usual) norm .1
ll(xl, ... , xn)ll = (L:~ lxil 2)
2 on C". When dealing with Hilbert spaces, isomorphism will mean
norm-preserving (or isometric) isomorphism.
Given au-finite measure m on au-algebraS of subsets of a set S, one defines the space
L2(S,S, m) :={I: S-+ C 1: I is measurable, lllll2 < oo},
1
where llllb := (fs ll(s)l2 dm(s))". (In fact, each I is actually a representative from its equivalence
class of all functions which differ from it on a measure zero set, as usual.) Then L 2 ( S, S, m) (or just
L2(S) if all else is understood) is a Hilbert space ([9], 2.1.14). The inner product on L2(S) which
yields the above norm is defined for two elements I, g by< l,g >= fs l(s)g(s)dm(s).
1.2 Bounded Operators on Hilbert Spaces ([9],2.4).
Let 1l, K, be two Hilbert spaces. A linear operator T : 1(, -+ K, turns out to be continuous if
and only if there is a real constant c such that for all x E 1l, IITxllx: 5 cllxll-x ([9], 1.5.5). Such
an operator T is called bounded and 8(11,, K.) denotes the linear space of all such bounded linear
maps. The operator norm for an element T E 8(11,, K.) is defined to be the infimum over all such
bounds c. Equivalently, the operator norm can be defined by IITII := sup{JITxlll: llxll = 1}. Then
(8(1l, K.), II ·II) is a Banach space, essentially since the range of each (continuous, linear) operator T
is in a Banach space ([9], 1.5.6). In the case that K, = 1l, 8(1l, 1l) will be denoted simply by B(1l).
For an operator T E B(1l, K.) there is a unique operator T* E 8( K,, 1l) such that < T* y, x >-x = < y,Tx >IC for all x E 1l andy E K.. This operator T* is called the adjoint ofT. If C, is yet another
Hilbert space and S, T E 8(1l, K.) and R E 8(/C, C.), then the following conditions hold:
(1) (aS+ bT)* =aS* + bT* for any a, bE C;
(2) (RS)* = S* R*;
4
(3) (T*)* = T;
(4) IIT*TII = IITII2;
(5) IIT*II = IITII.
In the case of B('H), the adjoint defines an involution.
Let l1t and I~e be the identity operators on 1l and JC respectively. An operator U E B('H, JC) is
called unitary if U*U = I1t and UU* = I~e.
THEOREM ([9], 2.4.5 AND 2.4.6). A surjective operator U: 1i-+ JC is an isomorphism if and only
if u- 1 exists and u-1 = U*. Further, V : 1l -+ JC is a unitary operator if and only if V is a
norm-preserving (or, equivalently, inner product preserving) map of'H onto /C.
So unit aries are exactly the (isometric) isomorphisms of two Hilbert spaces.
An important example of a set of bounded linear operators on a Hilbert space is L1(G, m) acting
on L 2(G,m) where m is a Haar measure on the locally compact group G. For simplicity of notation,
assume G is unimodular so that the Haar measure is both left and right invariant. Denote by L1 (G)
the Banach space
L 1(G,m) := {/: G-+ C 1: f is measurable, llfll1 < oo},
where 11/lh := fs lf(s)ldm(s) and, as usual, functions are identified that differ on a null set ([9],
p.53). L 1(G) becomes a Banach *-algebra (see definitions below) with convolution as the product,
which is defined for two elements/, g E L1(G) by the function f * g, where
f * g(x) := L f(y)g(y- 1x)dm(y) (for almost all x E G).
Cauchy-Schwarz shows this integral equation convergent for almost all x E G, and then f * g is
shown absolutely integrable over G, and so f * g E L1(G). The involution on L 1(G) is defined, for
f E L 1(G), by the L 1(G) function f*(x) := f(x- 1) (for almost all x E G). The Banach *-algebra
L1(G) acts on the Hilbert space L2(G) by the left-regular representation >..0 as follows:
>..J h := j * h (for f E L1 (G), and all hE L2 (G)),
where convolution is defined as above. Moreover, >..J can be shown to be linear and bounded by
11!111· Thus, for each f E L 1(G), one has >..J E B(L2(G)). Chapter three expands on this important
representation.
1.3 C*-algebras.
5
A Banach algebra A is defined to be an algebra (over C ) which is a complete normed linear
space over C such that for any two elements A, B E A, IIABII ::=; IIAIIIIBII ([9], 3.1). An involution
on a Banach algebra A is defined to be a map T 1-+ T* :A~ A such that the following conditions
hold for any two elements S, T E A:
(1) (aS+ bT)* =aS*+ bT* for any a, bE C;
(2) (TS)* = S*T*;
(3) (T*)* = T.
If A has a continuous involution, then it is a Banach *-algebra. A Banach *-algebra A IS a
C*-algebra if it satisfies the C*-condition:
IIT*TII = IITW (for all TEA).
A *-homomorphism of two C*-Algebras (or Banach *-algebras) is an algebra homomorphism that
preserves involution. *-homomorphisms of C*-Algebras are necessarily continuous. Further, if a
*-homomorphism is an isomorphism, then it is necessarily norm-preserving ([9], 4.1.8). Thus, a
C*-map or C*-isomorphism will refer to an (isometric) *-isomorphism of C*-Algebras.
For a Hilbert space 1l , B(1l) equipped with adjoint is a Banach *-algebra and, as noted above,
the C*-condition is met. So B(1l) is a C*-algebra. B(1l) (or any C*-subalgebra of B(1l)) is often
called a (C*-)algebra of operators on 1l . It turns out that these are essentially the only examples
of C*-algebras.
THEOREM: GELFAND-NEUMARK ((9], 4.5.6). Any C*-algebra A is isometrically *-isomorphic to
a C*-subaJgebra of B(1l) for some Hilbert space 1l .
So it makes sense to define a C*-algebra to be finite dimensional if it is embedded in B(C") for
some finite integer n. Further, the following alternative definition of a C*-algebra can now be shown
equivalent to the above: a norm-closed subalgebra A of B(1l) which is closed under involution is
called a C*-algebra.
Finally, one defines the C*-direct sum of C*-Algebras. For a finite number of C*-Algebras,
At, ... Ak, let A be the set of all k-tuples (A1J ... ,Ak) E A 1 x ··· x Ak. Define addition, scalar
multiplication, involution, and multiplication coordinatewise on A . Define the norm on A by
II( At, ... , Ak)ll := max{IIAdl, ... , IIAkll}. Then A is a C*-Algebra, denoted At 61· · · El1 Ak.
An important example of a C*-algebra is C0 (X). If X is a locally compact Hausdorff space, then
C0 (X) denotes the space {I : X ~ C 1: I is continuous, vanishing at oo }, with pointwise scalar
multiplication, addition, multiplication. Further, if involution is defined for each I E Co(X) by
6
J*(x) := ](x), then C0 (X) is an involutive algebra. If Co(X) is given the supremum norm ll·lloo
defined for f E Co(X) by 11/lloo := sup{l/(x)l 1: x EX}, then it is a C*-Algebra ([12], p.250).
1.4 Projections in 8(1£).
The study of irreducible representations of finite dimensional C*-Algebras depends largely on
the study of projections in 8(1l) . The ultimate decomposition theorem for finite dimensional
C* -Algebras is expressible in terms of minimal projections. The following sub-section will define
projections in 8(1£) and list results needed in the sequel. Most of the results follow from (9], 2.5.
Definition. An element A in 8(1£) is called a projection if A is a self-adjoint idempotent. (That
is, A= A2 and A= A*.)
Let P be a projection in 8(1l) and then let Y = P1l. Then Y is a closed subspace. On the other
hand, recall from the Hilbert space subsection above that if Y is a closed subspace of a Hilbert space
1£ , then 1£ e:! Y Ef7 Y .L. So any element v E ?{, is uniquely expressible as v = y + z where y E Y
and z E y.L, and so the equation Py( v) := y defines a (bounded) linear operator Py on 1l called
the projection onto Y parallel to Y .L. It is easily seen that Py = P~ and Py = Py. Thus, there
is a one-to-one correspondence between closed subspaces in 1{. and projections in 8(1£). Further,
the projection Py~ onto y.L is seen to be Py~ =I- Py. Using direct summation, one has that
Y = {x E 1l 1: Pyx= x} and y.L = {y E 1{. 1: Py~y = y}, and so Py is called the orthogonal
projection of 1£ onto Y. Henceforth, projection will mean orthogonal projection.
The projections in 8(1l) form a lattice which determine practically all of the structure of any
C*-subalgebra.
Definitions.
(1) (Order Structure) Define the partial-ordering on the set of projections in 8(?-l) as follows:
for two projections P and Q, P ::; Q iff P1l ~ Q1l. In the case of P ::; Q, P is called a
subproiection of Q.
(2) For a *-subalgebra A of 8(1l), let P be a non-zero projection in A. P is called a minimal
projection in A if P has no subprojections in A other than 0 and P.
(3) A set X of projections is called orthogonal if PQ = 0 whenever P "# Q are both elements of
X.
PROPOSITION ((9], 2.5.2). Let P and Q be two projections in 8(1l) that project onto (closed)
subspaces Y and Z respectively. The following are equivalent:
(1) Y ~ Z (or, equivalently, P ::; Q)
7

(2) PQ = P
(3) QP = P
( 4) IIPxll $ IIQxll (Vx E 1£)
The following theorem describes the connection between minimal projections and C*-Algebras.
PROPOSITION ([1], 1.4.1). Let A be a finite dimensional C*-algebra.
(1) A (non-zero) projection Pin A is minimal if and only if PAP= CP. In this case, there is a
(continuous linear) functional f E A# such that PAP= f(A)P for all A EA.
(2) A is generated by its minimal projections.
(3) Every projection Pin A is the finite sum of an orthogonal set of minimal projections in A .
Suppose A is a finite-dimensional C*-Algebra containing the identity I. I is trivially a projection,
so I= P1 + · · · + Pr for some set of minimal and pairwise orthogonal projections P1, ... , Pr E A.
Since Pi1lnPj1l = {0} whenever i ::fi j, one can break 1l up into the direct sum 1l ~ P11l$· · ·$Pr1l.
To facilitate the connection between irreducible representations and minimal projections which will
be made in chapter three, we will now define a certain equivalence relation on the set of projections
in a C*-Algebra. Let A be a C*-subalgebra of 8(1£) . Two projections P and Q in a C*-Algebra
A are called equivalent (in A), written P "' Q (in A), if there is an element V in A such that
P = VV* and Q = V*V. In the case that P and Q are minimal projections in A, then P "'Q (in
A) is equivalent to the condition that PAQ ::fi {0}. Finally, equivalent projections have isomorphic
ranges.
As noted above, there is a strong connection between projections in a C*-Algebra and its decom
position into a finite sum of simple C*-Algebras. The following definitions and results are used to
decompose a finite dimensional C*-Algebra A into simple C*-Algebras.
Definitions.
(1) A simple C*-Algebra is one which is C*-isomorphic to 8(~), the full algebra of operators on
some Hilbert space ~ .
(2) Let A be a C*-subalgebra of 8(1£) . The commutant of A in 8(1£) is defined to be (the
C*-algebra with unit I) A':= {BE 8(1£) 1: BA = AB VA E A}.
(3) For a subset X ~ 8(1£), a subspace ~ ~ 1l is called X -invariant (or sometimes called X
stable) if X~~~.
( 4) Let A be a *-subalgebra of 8(1£) .
(a) A is called irreducible on 1l if {0} and 1l are the only A-invariant subspaces of 1£.
8
{b) An .A-invariant subspace JC ~ 1l is called irreducible (for .A) if .A k is irreducible on IC .
(This is equivalent to JC having no proper, non-trivial, .A-invariant subspaces.)
PROPOSITION. Let .A be a *-subalgebra of 8(1£) containing the identity I. Then one has the
following properties:
(1) ({1}, 1.4.2) If .A is a C*-Algebra in 8(/C) and .A is irreducible on IC , then .A= 8(/C).
{2) For any e E 1£, Ae := {Ae 1: A E .A} is an .A-invariant subspace of 1l .
{3) Suppose Pis a minimal projection in .A and e E P1l (e ;f; 0). Then the projection PA{ onto
.Ae is a minimal projection in the commutant .A' .
( 4) If JC is an irreducible subspace for .A , then the projection PIC onto JC is a minimal projection
in the commutant .A' . Conversely, if P is a minimal projection in .A' , then P1l is an
irreducible subspace for .A .
We are now in a position to decompose a finite dimensional C*-subalgebra of 8(1£) . Let .A be a
finite dimensional C*-subalgebra of 8(1£) (for a finite dimensional Hilbert space 1l ). Recall I is
in the commutant .A' of .A . Let P1 , ... , Pr be a set of mutually orthogonal, minimal projections in
.A' such that P1 + · · · + Pr = I. Then let 1-li := Pi1l (for each i, 1 :5 i :5 r). These r Hilbert spaces
are pairwise orthogonal, .A-stable, and .A-irreducible subspaces of 1l . Further, 1l = 1£1 E!J • · · E!J 1-lr,
since the projections sum to I. Since each 1ti is irreducible for .A, one has .APi =.A I'Hi~ 8(1-li)·
Now, one can routinely verify that .APi n .APj = {0} whenever i :/; j (1 :5 i,j :5 r) by using the
fact that each P~~; commutes with all .A , and the fact that the projections are mutually orthogonal.
The set { P1, ... , Pr} is divided into equivalence classes by the previously mentioned equivalence
relation for projections in .A. Let {Pi11 ••• , Pi,} be a set of representatives, one from each of these
equivalence classes. Then .A decomposes as the C*-direct sum .A~ 8(1li 1 ) $ · · · $ 8(1li, ). So one
has the following theorem:
THEOREM ([1], 1.4.5). Any finite-dimensional C*-Algebra is C*-isomorphic to a direct sum of
finitely many simple C*-Algebras.
II C*-bundles.
Bundle and C*-algebra theory tie together when a C*-Algebra .A is isomorphic to r o(C) , the set
of sections on some bundle C which vanish at infinity. It will be seen in chapter five for a certain
type of group that the group algebra C*(G) is isometrically isomorphic to r o(E), the continuous
sections of a certain C*-bundle E which vanish at infinity. Further, chapter three will show that
the irreducible *-representations on fo(E)- hence, on C*(G) as well- have a concrete description.
9
But for now some preliminary notions about bundles are required.
The definitions below follow from [5] and [2]. Note that all topologies are Hausdorff.
( 1) A Bundle over X is a triple B = (p, B, X) where B, X are Hausdorff spaces and p : B -+ X
is an open and continuous surjection.
X is called the Base Space,
B is called the Bundle or Total Space,
pis called the Bundle Projection
of B.
For each x EX, p-1(x) is called the Fibre over x and is denoted B:r (or B(x)) when there is
no ambiguity concerning the projection being used. Notice that the total space, as a set, is
the disjoint union of all the fibres, B 8~ U:rex B:z:.
(2) A Banach bundle B over X is a bundle B = (p, B, X) with each fibre B:r equipped with
some given (complex) Banach space structure such that
(a) b 1-+ llbll: B-+ R is continuous (where llbll := llbiiB~, the norm in b's fibre)
(b) addition in B defined fibrewise is continuous from {(b, c) E B x B 1: p(b) = p(c)} to B.
(c) scalar multiplication on B defined fibrewise is continuous from C x B to B.
(d) (The "zero-limit" property) If x E X and {bi};eJ is any net in B such that llbill -+ 0 and
p(bi)-+ x (in X), then bi-+ OB~ (the 0 in banach space B:z:; also denoted O:z:).
Note that the last condition has an equivalent form which gives a base of neighborhoods for
O:r in B:
( d ') Let x E X. Then the collection of all sets of the following form establishes a base of neigh
borhoods for O:r in B:
N(x: U,t) :={bE B 1: p(b) E U and llbll < t}
where U is an X -neighborhood of x and f > 0.
(3) A C*-Algebra Bundle (or just C*-Bundle) is a banach bundle B = (p, B, X) with each fibre
B:r having a given C*-Algebra structure such that
(a) multiplication (defined fibrewise on B) is continuous from {(b,c) E B x B 1: p(b) = p(c)} to
B,
(b) involution defined fibrewise on B is continuous.
( 4) For a Banach space B and Hausdorff X, the Trivial Bundle is defined by B = (p, B x X, X)
where p projects onto the second factor, B x X has the product topology, and the fibres
B(x) := B x {x} have the Banach space structure derived from the bijection b 1-+ (b,x)
10

(bE B, fixed z EX). It is routine to verify B is a banach bundle.
(5) Maps Between Bundles and Cross-sections.
For two bundles B = (p, B, X), C = ( q, C, Y), we have the following definitions:
(a) A Bundle Map denoted t.p: B ~Cis a pair of continuous maps t.p: B ~ C, f: X~ Y such
that the following commutes:
B __!___. C
X ------+ y I
t.p is called over f. In the case X = Y and f = idx, then t.p is called over X. Notice that in
general q(t.p(b)) = f(p(b)) by commutativity, so t.p(b) E CJ(x) where b E Bx (x = p(b)), so <p
takes Bx ~ CJ(x) (that is, carries a fibre into a fibre). So for each z EX, denote by 1./)x the
fibre restriction map: 1./)x := 'PIBz : Bx ~ CJ(x) .
(b) A Banach Bundle Map between two banach bundles B and C is a bundle map t.p : B ~ C
over, say,/, such that each fibre restriction map 1./)x: Bx ~ CJ(x) is bounded and linear.
(c) A C*-Bundle Map between two C*-Bundles B and C is a bundle map t.p: B ~Cover,
say, /, such that each fibre restriction map 1./)x : Bx ~ CJ(x) is a C*-map. Since C*-maps are
bounded and linear, then a C*-Bundle map is a Banach bundle map.
(6) A Cross-section of a bundle B = (p,B,X) is any functions: X~ B such that po s = idx.
That is, s maps each z E X to an element in the fibre over X.
A Section of B is a cmitinuous cross-section. r(B) denotes the space of all sections s on
the bundle B . s is said to "pass through" each b E Range( s). If each b E B has a section
passing through it, then B "has enough sections".
fo(B) denotes the subspace of f(B) whose sections vanish at infinity (that is, Vc > 0, there
is a compact K ~X such that s(z) < f. for all z EX\ K). Of course if X is compact, then
f(B) = r o(B).
(7) The C*-Algebra of sections ((FD], p.581). For a C*-bundle B over a locally compact Hausdorff
space, equip r o(B) with supremum-norm and pointwise operations for multiplications and
addition. For s E r o(B), define the involution for s pointwise: s*(z) := (s(x))* (for each
x EX). Then, by the definition of a C*-bundle, each of these operations defines continuous
cross-sections which vanish at infinity. The supremum-norm is a C*-norm on this space.
(r o(B), II · lloo) is, thus, a C*-Algebra called the cross-sectional C*-Al~ebra of B ((FD],
p.581).
11
Chapter 3 Representation Theory
As noted in the introduction, part of the program of analysis is the classification of representations.
This chapter lists representation theory results for C*-Algebras which are required in the sequel,
especially in chapter five. Since this thesis deals only with *-algebras, the words "*-representation"
and "representation" are freely interchanged.
! *-Representations of C*-algebras.
Recall all the definitions and results from 2.1. This section will develop the representation theory
needed in later chapters for C*-Algebras. The first part of this section deals with general C*-Algebras
of operators while the second part specializes to finite dimensional C*-Algebras.
Definitions. Let .A be a C*-algebra in 8(1i) for some Hilbert space 1i.
(1) A *-representation (or just representation) of .A is a *-homomorphism 1r : .A--+- 8(1i1r) for
some Hilbert space 1i1r. 1r is called a finite dimensional representation if the space on which
1r(.A) acts, namely 1i1r, is finite dimensional. Note, too, that this definition applies if .A is
just a Banach *-algebra.
(2) An irreducible representation of .A is a non-zero representation 71" such that 1r(.A) is irreducible
for 1i1r (that is, 1i1r has no non-trivial, closed subspaces which are 1r(.A)-invariant).
(3) Two representations 71", u of .A are (unitarily) equivalent (written 1r ,_ u) if there is an isometry
U of 1i1r onto 1i(1 that "intertwines" their actions:
U1r(A) = u(A)U (for each A E .A),
or, equivalently, U1r(A)U~ = u(A) for each A E .A. Note that any such U is a unitary
operator.
One recalls from section 2.1.2 that unitaries on Hilbert spaces are really just "changes of basis", and
so the ranges of equivalent *-representations are indistinguishable as far as geometric properties are
concerned ([1], p.13). The spectrum of a C*-Algebra .A is defined to be the set of equivalence classes
of all the irreducible *-representations on .A (partitioned by unitary equivalence), often denoted by
A. The description of A for a given C*-Algebra .A is a major objective of representation theory.
We now specialize to the case where .A is a finite dimensional C*-Algebra.
12
THEOREM. Let A be a C*-algebra in 8(1£) for a finite-dimensional Hilbert space 1£. Then any
irreducible representation of A is equivalent to one obtained by restricting A to an A-irreducible
subspace K, ~ 1£.
PROOF: From 2.1.4, A is generated by its minimal projections. So if 1r is an irreducible represen
tation of A, then there is a minimal projection E E A such that 1r(E) i= 0. Let f E A# be a
continuous linear functional as in 2.1.4. So EAE = f(A)E for all A E A (since E is minimal). Now
1r(E) is a (non-zero) projection in 8(1l1r) and so one may pick 71 E 1r(E)1l1r with 111111 = 1. On the
other hand, choose e E E1l with 11e11 = 1. Then 1r(A)71 and K, := Ae are irreducible subspaces of 1lr
and 1l respectively. Now, since 1r is a representation and Eisa projection, one has, for any TEA,
ll1r(T)77W = ll1r(T)1r(E)7JII 2 = < 1r(TE)7J,1r(TE)71 >=< 1r(ET*TE)71,7J >= f(T*T) < 1r(E)71,71 >= f(T*T) = /(T*T) < Ee,e >=<
J(T*T)Ee,e >=< ET*TEe,e >=< rEe,rEe >=< re,re >= urell2• sou : 1£1r ~ x:. by
1r(T)77 ~--+ Te is an isometry. Finally, the following equation intertwines 1r with the representation of
A defined by restricting A to K.:
1r(S) = U*(SI.~:)U (for all SEA).
To see this, let S E A. Then for any 1r(T)71 E 1l.1r we have U*(SI,~:)U1r(T)77 = U*(SI.~:)Te = U* STe = 1r(ST)71 = 1r(S)1r(T)1J as required.
Now recall from 2.1.4 that any irreducible subspace K, ~ 1{. for A is the range F1l for some
minimal projection F E A'. So along with the above theorem one now has that for any irreducible
representation 1r of A there is a minimal projection Fin the commutant A' of A such that 1r l"oJ IF?-l
(restriction of A to F1i). One also recalls that for any FE A', F1i is an irreducible subspace for A
and so IF?-l defines an irreducible representation of A. Thus, there is a strong connection between
irreducible representations and minimal commutant projections for a C *-Algebra A .
From 2.1.4, one has that the identity I is decomposable as P1 + · · · + Pr for a set of mutually
orthogonal and minimal projections in the commutant of A . For any two minimal projections in the
commutant, say P and Q, one can also show that P- Q (in A') iff the irreducible representations
they define are equivalent. Since equivalence of projections partitions the set of minimal projections
in a finite dimensional C*-Algebra into a finite number of classes, we now have that A is a finite
set. Thus, it will be sufficient to find a set of mutually orthogonal, irreducible projections with sum
I in A' in order to get a representative for each irreducible representation of A .
II Group C*-algebras.
13
In this section the C*-algebra associated with a locally compact group G is defined. We specialize
quickly to the case where the group is locally compact and abelian to produce results which will be
needed in the case that G is the extension of a finite group by an abelian group (chapter 5). The
main reference for the locally compact abelian case is [12].
11.1 General locally compact groups.
For a general unimodular locally compact group G with measure m, the group C* -algebra C* (G) is
formed from L1(G) . From 2.1.2, L1(G) is a Banach *-algebra. By [5] (p.387), any *-representation
1r of L 1(G) is continuous and ll1rll :5 1, where ll1rll := sup{ll7r(/)lll: 11/lh = 1}. Define the C*-norm
on L1(G) as follows, for an element f E L1(G):
11/11. := sup{ll7r(/)IIB(7t,.) 1: 1r is a *-representation of L 1(G)}.
Notice that for any *-representation 1r, one has 1r(j* *f) = 1r(j)*7r(j) and these two elements have
the same norm in the range space, so one easily verifies the C*-condition II/** /II. = 11111;. However,
in general, L 1 (G) fails to be complete with respect to this new norm, and, thus, falls short of being
a C*-Algebra. The group C*-Algebra is defined to be the completion of L 1 (G) with respect to the
C*-norm II· II• and is denoted by C*(G) .
Recall the left-regular _AG representation of L1(G) on L2(G) from 2.1.2. In the case that G is
an amenable group, the C*-norm is determined by this left-regular representation. See (6] for the
definition and basic properties of amenable groups. So the C*-Algebra of an amenable group G is
isomorphic to the reduced~ C*-Algebra, denoted C~(G), which is the closure of _AG(L 1 (G))
in the C*-algebra B(L2(G)) ([14]). Chapter five will use the fact that any locally compact abelian
group is amenable, as is any extension of a finite group by a (locally compact) abelian group ([6],
p.8).
11.2 Abelian locally compact groups.
The rest of the current section deals with a locally compact and abelian group A. It is shown that
the group C*-algebra is particularly simple: C*(A) £I! C0 (A), where A is the pontryagin dual of A.
Rudin ([12], ch.1) is relied upon heavily for all of the results.
For the rest of the section fix a locally compact abelian group A. A has a non-negative regular
measure which is not identically zero and is translation-invariant (that is, a Haar measure). To prove
this, one constructs a positive translation-invariant linear functional Ton Coo(A) (the continuous
functions on A with compact support)([12], p.1). Then the Riesz representation theorem gives a
measure mas required ([11], p.42).
14

The Pontryagin Dual of A is defined to be
A== {x: A-+ T 1: X is continuous, x(ab) = x(a)x(b)\t'a, bE A}'
where T is the 1-torus: {c E C 1: lei = 1}. Each x E A is called a character. Note that this
definition implies that lx(a)l = 1 (X e .A, a E A) and that 1 = x(1A), since each character is
a homomorphism. A itself becomes an abelian group when equipped with pointwise product: for
two characters x, 1/J, xt/J is defined by x'f/J(a) := x(a),P(a). So xt/J is also a character. Note that
the identity in A is defined by the homomorphism 1 A (a) := 1 (for each a E A). Inverse is easily
calculated: 1 = xx-1(a) := x(a)x- 1(a) (Va E A), so x- 1 (a) = x(a) since we are working in the
1-torus.
A topology is introduced on A with respect to which it, too, is a locally compact (and abelian)
group. The topology will be defined by embedding A into L 00 (A). Each x E A is a bounded and
continuous (hence Borel) function on A, so
X E L00 (A) := {g :A-+ C 1: g is m-measurable and ll9lloo < oo}
(with the usual identifications of zero-measure sets), and, in fact, A is in the unit sphere of L 00 (A).
It is a standard result of analysis that L00 (A) ~ [L1{A)]# = {continuous linear functionals g :
L1(A)-+ C}, the continuous linear dual of L1{A) , via g(l) := JA l(x)g(x)dx {[9], p.55). For each
IE L1{A) define the Fourier transform function f on the set A :
f(x) := L l(a)x(a)da,
convergent for each x E A since x is bounded and continuous on A and I E L 1{A). For a fixed
X E A the map I ..-.. f(x) (=x(l)) is a linear functional on L 1 (A) corresponding to x in L 00 (A).
Further, A corresponds to multiplicative linear functionals in L 00 {A) . Now, give A the weak
topology with respect to {fl: IE L 1(A)} ;that is, the weakest topology such that each J: A-+ C
is continuous. This is just the weak-* topology on L 00 (A) restricted to A, and A is in the unit ball,
which is weak-* compact by Alaoglu-Bourbaki ([9], p.45). It can be shown that A is locally compact
{[12], 1.2.6).
Each fis in C0 (A), which is a locally compact space. Let A(A) := {fl: IE L1{A)} £; Co(A), the
"fourier algebra" of A . A(A) is a *-algebra when equipped with pointwise operations and adjoint:
f•(x) := f(x).
THEOREM ([12], P.9). A(A) is a self-adjoint, separating subalgebra of Co(A), so is dense in
(Co(A), ll·lloo) by Stone-Weirstrass.
15

A has a left and right invariant Haar measure since it is locally compact and abelian. The following
Plancherel theorem allows this measure to be chosen nicely.
PLANCHEREL THEOREM ([12], P.26). Haar measure on A can be normalized so that the map
I 1-+ f: L1(A) n L2 (A) ----+ L2(A) is an isometry with dense image, and so it is uniquely extendable
to an isometry P: L2(A)--+ L2(A) (since L1(A) n L2 (A) is dense in L2(A)).
The unitary P establishes the isomorphism B(L2(A)) ~ B(L2(A)). .A(A) and L1(A) will be
connected via this isomorphism.
With the isometry P, one has the property that for each I E L1 (A) and h E L2 (A) then P(l *h) = f. P(h) (where product is pointwise). This can be seen by first restricting h to L 1(A) n L2 (A) (so
I* h E L1(A) n L2 (A), too, by the left-regular action), and so one calculates the action of P: for
x eA.,
P(l * h )(x) = 1--;-h(x)
: = i I* h(a)x(a)da
= i x(a)x(b- 1 )x(b) L l(b)h(b- 1a)dbda
= i x(a)x(b- 1)x(b) i l(b- 1a)h(b)dbda (let b' = b- 1a)
= i h(b)x(b) i l(ab- 1 )x(ab- 1 )dadb (using Fubini)
= i h(b)x(b) i f(a)x(a)dadb (by translation-invariance)
== icxfh(x) = iP(h) (x)
The property is established for all L2(A) by extension (again, L1(A) n L2 (A) is dense in L2(A) and
P is a linear isometry).
Define M : C0 (A)--+ B(L2(A)) as follows for an element g E C0 (A):
M(g) h := g · h (pointwise product, for all hE L2(A)).
It is routine to verify that M is a representation of the C*-Algebra (C0 (A), II · lloo)· M is easily
shown injective, and so M embeds C0 (A) onto a C*-subalgebra of B(L2(A)).
Define the "left regular" *-representation of L1(A) in B(L2(A)) for each IE L1 (A) by
>.j h := I* h (for all hE L2(A)).
A is abelian and locally compact, so it is amenable, and so C*(A) is isomorphic to the reduced
C*-Algebra C~(A). That is, C*(G) is the closure in B(L2 (A)) of the image of L 1(A) under the
left-regular representation ).A.
16

Finally, one has M([) = 'P >tfP-1 for each IE L1(A). Thus, I 1-+ M-1(P>tfP-1 ) is an isometric
*-isomorphism of L1(A) and A(A). This implies that C*(A) ~ C0 (A) by extension, since A(A) and
L1(A) are dense in C0 (A) and c• (A) respectively.
III Irreducible Representations of C*-Bundles.
This section presents a major result which will give a method to find all the irreducible represen
tations of the group C*-algebra C*(G) for a crystal group G. This result follows [5] (p.582).
Throughout this section C will denote the C*-algebra of sections (r o(B), ll·lloo) defined in 2.11 for
a fixed C*-bundle B = (p, B, X) over a locally compact and Hausdorff space X. For a point z in the
base space X of B , let B; denote the set of (equivalence classes of) irreducible *-representations
of the C*-fibre Bx.
Fix x EX. If 1r E Bx then the following equation defines a *-representation II on C.
IIJ='lrJ(x) (VIEC).
Since B is a C*-bundle, it has enough sections ([5], 11.13.15). Thus, the range of II and 1r are
identical and so II is also an irreducible *-representation, but of C. Conversely, suppose II is an
irreducible *-representation of C. Then there is a unique z E X and 1r E B; such that II is given
by the above equation ([5], II.8.8). The proof of this converse consists of taking the kernel of II (an
ideal in C) and evaluating it at each x E X to produce ideals lx ~ Bx, and showing that lx is a
proper subset for exactly one x EX. Then II1 is shown to depend only on l(x) (IE C), so there
is a unique 1r E Bx such that the above equation holds ([5], p.583).
Thus, if one is working on a C*-bundle whose fibres are each finite dimensional, then the structure
space C of the (usually non-finite dimensional) C*-algebra C = r o(B) is simplified to the finite
dimensional case in some sense. This approach is taken in chapter five for c• (G) .
17

Chapter 4 Crystallographic Groups
and the Seventeen Planar Crystal Groups
This chapter will define crystallographic groups (or crystal groups for short), list some of their
properties, and give a detailed description of the seventeen planar crystal groups.
A crystallographic group arises quite naturally as the symmetry group of a repetitive cellular
{bounded) pattern in Euclidean n-space. In fact, crystallographers deal with physical representations
of such phenomena. In two dimensions, wallpaper and embroidery patterns often use such repetition.
One of Hilbert's famous problems (number 18) essentially was to show only a finite number
of distinct pattern-types (symmetry groups) exist for each given n-space. Bieberbach solved this
problem affirmatively and in general around 1910 although Leonardo Da Vinci apparently showed
as far back as the renaissance that only 17 such planar (n=2) pattern-types exist.
! Crystal Groups.
The notation used in this section to define crystal groups somewhat follows [8]. En will denote
Euclidean n-space: that is, R n with distance derived from inner product d{ x, y) = < x - y, x - y > ~
(and norm, llxll = < x, x >i in the case of a given fixed origin 0). ISOM{En) will denote the group
(with composition as product) of "rigid motions" of En : that is, distance-preserving permutations
of En , often called simply "isometries". It is a fundamental result of Euclidean geometry that each
u E ISOM(En) is uniquely the composition of an orthogonal linear isometry cp E e(En) (with a
fixed point 0 E En as origin) and a translation t" where v E En and tv(x) := v + x for all x E En.
That is, u = t" o cp {(10], p.101). TRANS(En) will denote the (normal, abelian) subgroup of
ISOM(En) consisting of pure translations. Identifying TRANS(En) with En, one writes u = (cp, v)
for elements of ISOM{En) . So ISOM(En) acts on En by (cp, v)x := tv(x) + cp(x). With this
notation, TRANS{En) = {(1,v) 1: v E En} where 1 is ida(E")· Product in TRANS(En) by
composition is then identified with addition in En. Product (composition) in the larger ISOM{En)
is determined by the action on a point x E En: (cp,v)(1P,w)x := v+cpw+cp1Px = (cp1P,cpw+v)x, and
so (cp, v)(1P, w) = (cp1P, cpw+v). Then ISOM{En) breaks up into the semi-direct product En XI e(En)
by using the natural action of e(En) on En (again, with fixed origin 0). Notice that {cp,v)- 1 =
(cp- 1 , -cp- 1v) and (1, 0) is the identity. Further, ISOM{En) is a topological group with the subspace
topology from GL{En) x En.
18

A subgroup G ~ ISOM(En) is defined to be a Crystal Group if G is discrete (in ISOM(En)) and
the quotient space En /G is compact. Note that this is the topological quotient space of G-equivalent
classes of points from En . Some elementary properties of crystal groups are now listed.
For a crystal group G ~ ISOM(En) let A denote G n TRANS(En) = {(1, v) E G}.
PROPOSITION. For a crystal group G ~ ISOM(En), A is a normal abelian subgroup of G and has
no (non-trivial) torsion elements.
PROOF: To see A is a subgroup, note (1, 0) e A and if (1, a), (1, b) E A, then (1, a)(1, b)-1 = (1, a- b) EGis of the right form to be in A. A is obviously abelian. For normality, let (<p, v) E G
and {l,a) EA. Then the conjugate (<p,v)(1,a)(<p,v)-1 = (<p,v)(1,a)(<p- 1,-<p-1v) = (1,<pa) is in
A. Now if (1, a) were torsion (¥ (1, 0)) of order k > 1, then a ¥ 0 but (1, 0) = {1, a)k = (1, ka), so
ka = 0, and thus a= 0, a contradiction.
Since A is normal, the quotient group D := G/A can be formed. It turns out that the quotient D
is exactly the projection of G into 9(En) , and D is finite.
PROPOSITION. For a crystal group G ~ ISOM(En), Dis isomorphic to P1(G) := {t.p 1: (<p,v) E G},
the projection of G into 9(En ).
PROOF: Note (1, 0) E G so P1(G) contains the identity transformation, and if we pick any two
elements <p,'I/J E P1(G) then (<p,v), (,P,w) E G and so (<p,v)(tP,w)-1 = (<p,P- 1 ,v- <p,P- 1w) shows
<p,P-1 E P1(G), which shows P1(G) is a group.
Now, if (<p,v), (<p,w) are in G, then (<p,v)(<p,w)-1 = (1,v- w) E A shows both these elements
must be in the same A-coset. On the other hand, if ( <p, v), ( 1/J, w) E G are in the same A-coset, then
( r.p, v) = (1, a)( 1/J, w) for some (1, a) E A, and so (r.p, v) = ( 1/J, a+ w). By uniqueness of decomposition
of ISOM(En) as En X1 9(En), r.p = tP· Thus, [(<p, v)] ...-+<pis easily an isomorphism.
PROPOSITION ((15]). For a crystal group G ~ ISOM(En),
(1) G is a closed subgroup of ISOM(En) ,
(2) Dis a finite group.
Thus any crystal group G fits the exact sequence
where A is abelian and D is finite (and t is inclusion, p is the natural projection). It can further be
shown that A is free abelian of rank n (when G ~ ISOM(En)) and A is maximal abelian in G. A
is called the "lattice" of G and D is called the "point group". Bieberbach showed that the above
19
definition for a crystal group is equivalent toG (~ ISOM(En)) being discrete and the projection of
the lattice A into En containing n linearly independent vectors ([8], p.770). (Thus, A can now be
identified with its projection in En.) The dimension of a crystal group is thus defined to be the rank
of A. Zassenhaus showed, on the other hand, that any group G is isomorphic to an n-dimensional
crystal group iff G has a normal, maximal and free abelian subgroup A of rank n with finite index
in G ([8], p.770).
If the above sequence splits (that is, there exists an injective homomorphism D --+- G), then G
splits as the semi-direct product G ~ A >4 D (where d 1-+ AUT(A) by pullback and conjugation)
and G is called a symmorph; otherwise G is non-symmorphic. Farkas solves Hilbert's 18th problem
with the following steps for each n EN:
(1) Only a finite number of (non-isomomorphic) n-dimensional symmorphic crystal groups exist.
(2) Each n-dimensional crystal group can be imbedded in ann-dimensional symmorphic crystal
group.
(3) Each n-dimensional crystal group admits only a finite number of (non-isomorphic) n-dimensional
crystal subgroups.
Hiller notes the implementation of an algorithm to enumerate the crystal groups of each dimension. ~
The numbers of groups for each n grow at least as fast as 2n . n = 2 has 17; n = 3 has 219; and
n = 4 has 4783 (!) ((8]).
II The Seventeen Planar Crystal Groups.
Following some preliminary notation and properties, a representative from each of the seventeen
planar crystal groups is listed below. Schwarzenberger's descriptions are relied upon heavily ([13]).
11.1 Preliminaries.
Schwarzenberger in [13] gives a very concrete accounting for the seventeen distinct classes of planar
crystal groups. In the case of n=2, a crystal group G has normal abelian subgroup A ~ Z2 and the
finite quotient D ~ 8(R2) consists of reflections and rotations of the plane R 2. The rotations in
D form a cyclic subgroup Do which must be of order 1,2,3,4,or 6 (known as the "crystallographic
restriction"). Then _a rotation u E D which generates Do may be taken as a rotation about the
origin 0 by an angle of Car~(Do). Fix any reflection p E D. Then the product of p with any other
reflection Pi E D is a rotation ui in D, and so the entire point group D is generated by u and p,
and so one need only find two matrices Mu and Mp to generate the point group D embedded in
M2(R). It is, in fact, consideration of two reflections which happen to generate the rotation u that
gives Schwarzenberger's accounting of the 17 planar groups. As noted above, Bieberbach showed
20
the projection of A into R 2 has 2 linearly independent vectors, say t and s, which may be pick~d
with minimal length since A is discrete and En /G is compact. Then A £!! {it+ js 1: i, j E Z}, the
projection of A into R 2 , which, of course, is isomorphic to Z2 • The following theorem enumerates
the 17 possibilities for plane crystal groups according to the number of reflections in their point
group D.
THEOREM ([13]). Let isomorphism partition the set of 2-dimensional crystal groups. Then
(1) There are exactly 5 equivalence classes of planar crystal groups whose point group D has no
reflections.
(2) There are exactly 3 equivalence classes of planar crystal groups whose point group D has
exactly one reflection.
(3) There are exactly 9 equivalence classes of planar crystal groups whose point group D has two
or more reflections.
In order to get a representative from each planar crystal class, the following characterization of
elements in a crystal group G is given ([13], p.126). Let (<p, v) E G and let <p have order k in D
(identifying D with its image in 6(R2) ). Notice that (<p, v)k = (<pk, v + <pv + ... + <pk-1v) = (1, v + <pv + · · · + <pk- 1v) by the definition of the product, so a := v + <pv + · · · + <pk- 1v is in (the
projection of) the lattice A. Since each pair of elements in <p's A-coset in G differ by an element of
A, this relation between <p, v and A gives valuable information. First notice that this a is fixed by
<p since <p( a) = <p( v + <pv + · · · + rpk - 1 v) = <pv + ... + <pk - 1 v + rpk v = a (since the order of <p is k). So
if <p is a (non-trivial) rotation, then a = 0 is the only point fixed by <p, and if <p is a reflection, say
p, then a E lp, the axis of reflection for pin R 2 • In the case of a reflection, two cases occur. Let a
be of minimal length in {lp nA} such that (p, v)2 = (1, a) (note that reflections are order 2). Either
vis in A (case 1), or it is not (case 2).
1(c) In the first case we have (1,v) E A (and (p,v) E G) and so (p,O) = (1,v)- 1(p,v) E G, so
v = 0 may be chosen, and so (M"', v) is a representative of <p's coset. This case is termed
"centered" .
2 Otherwise, it is termed "primitive", and there are two sub-cases:
2(m) a = v + pv may be chosen to be 0, in which case v E /~. This case is called "primitive with
mirror";
2(g) a= v + pv may NOT be chosen to be 0, in which case v is neither in/~ nor in A. This case
is called "primitive with glide reflection".
These situations are used to get a particular element from each A-coset of G (which will, in turn,
21

generate G) for a representative from each of the seventeen planar crystal groups. The standard
naming convention for the planar crystal groups uses the above cases and the size of the cyclic
subgroup Do of D. For example, p4mg is the group which has 4 elements in Do (so 8 elements in
D) and has both a mirror and glide mirror (hence, two of each). The names of the seventeen groups
are: pl, p2, p3, p4, p6, em, pm, pg, cmm2, pmm2, pmg2, pgg2, p31m, p3ml, p4mm, p4mg, p6mm.
The following information is presented below for a representative from each of the seventeen plane
crystal classes. Two (non-zero, minimum length) linearly independent vectors t and 8 are chosen
as generators for A (~ Z2). To determine the point group D, two matrices are determined for a
reflection p and the rotation u from the group with respect to the basis t, 8. Multlipication in the
point group is tabulated. It is noted here that if two matrices Md1 and Md2 are associated with two
elements d1 and d2, respectively, of D, then the products d1d2 and Md 1 Md2 are also associated; also,
d11 is associated with the matrix inverse Mi 1 (that is, product order is preserved in this notation).
Each element of G can be expressed as (Md, (:))for some dE D and (:) E R 2 (with respect
to t, 8). A cross-section of D is a function ; from D to G such that p o ; = idn. In the case that
; cannot be chosen to be a homomorphism, a set of generators for a fixed D cross-section will be
listed, for then G can be described by {'y( d)( 1, G ) ) I: d E D, i, j E Z} by A-coset decomposition.
Each cross-section generator will be listed in the form ;(d)= (Md, u) for some u E R 2 (with respect
to t,8). Without loss of generality, ;(lv) = (1,0) will always be chosen.
22
11.2 Descriptions of the planar crystal groups.
Group pl is absolutely trivial. It is isomorphic to its lattice: G ~ A.
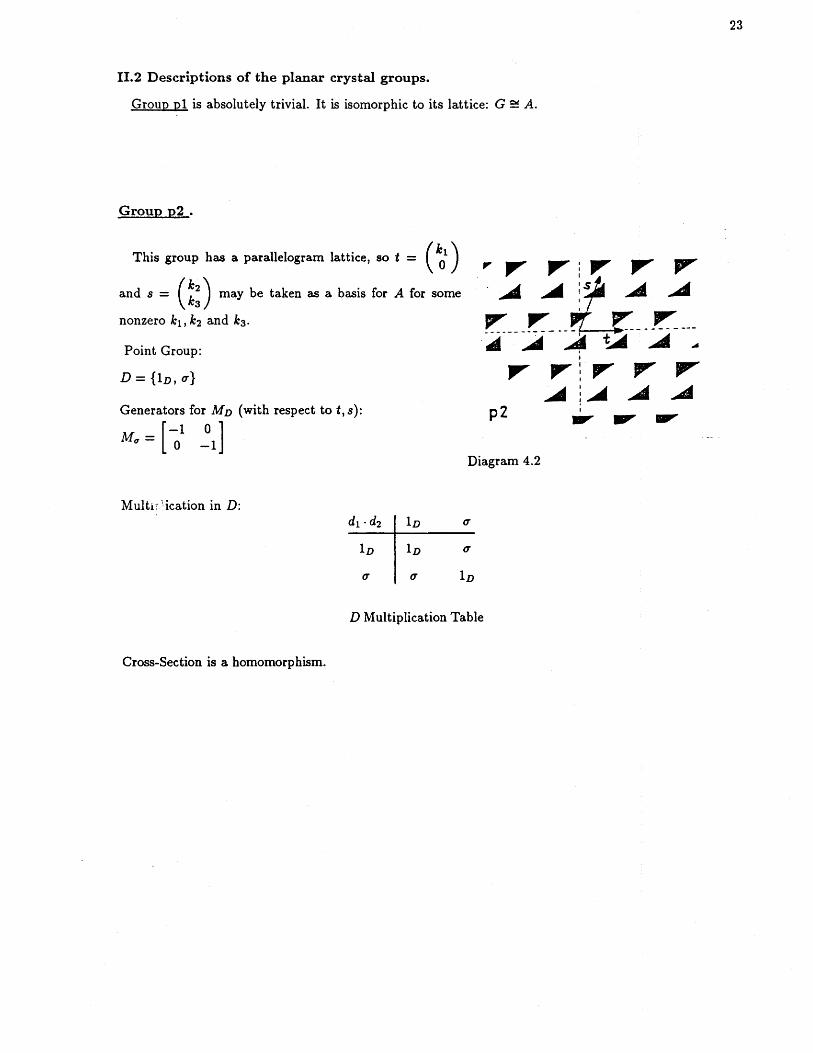
Group p2.
This group has a parallelogram lattice, so t = (kol) and s = ( ::) may be taken as a basis for A for some
nonzero k1, k2 and k3.
Point Group:
D = {lv, u}
Generators for Mv (with respect tot, s):
[-1 0 ]
Mq = 0 -1
Multi:~ ·,ication in D: lv
lv
0' 0'
, ,... ,- : ,... r ,.,..
~-::_it,;:,:__ .-~.4~~ ...
I
,..-~;,..-~~
~l.A A~ p2 I
Diagram 4.2
0'
0'
D Multiplication Table
Cross-Section is a homomorphism.
23

Group p3.
Here, t = cl:~ ) may be chosen, and then s = <r( t) =
(-lkl) :J , and t, s form a basis for A.
2 kl
Point Group:
D = {In, u, u2 }
Generators for Mn (with respect tot, s):
[0 -1] Mf7 = 1 -1
Multi:,:ication in D:
1n
1n 1n
1n
D Multiplication Table
Cross-Section is a homomorphism.
Diagram 4.3
1n
I I I I
!~ l I
'
24
,.... t -~----~

Group p4.
In this group, there are no reflections, and the rotation
tr is through an angle of ~. So if t is chosen as t = ( ~1 )
then 8 = u(t) = ( ~1 ), and t, 8 is a basis for A.
Point Group:
D = {lD, u, u 2, u 3}
Generators for MD (with respect to t,s):
[0 -1] M(7 = 1 0
~ ~ .... l~ ~ ~ ~
_; __ ~_)]~ ~>~--;-, ~. , ~ ~t, ,. , p4 ~\~ .... ~ ....
I
Diagram 4.4
Multl · ication in D: dl. d2 1D u u2 u3
lD 1D u u2 u3
(T u u2 u3 1D
u2 u2 u3 ln u
u3 q3 ln (T u2
D Multiplication Table
Cross-Section is a homomorphism.
25

26
Group p6.
No reflections, ~nd u is a rotation of f. Thus, t = ( k1
) and s = ( !k1 ) forms a basis for A. 0 , ~k
2 1
Point Group:
D = {1D, u, u 2, u 3
, u4 , u 5 }
Generators for MD (with respect tot, s):
[0 -1] Mu = 1 1
Diagram 4.5
Multi: lication in D: dl-d2 1D (J' (1'2 (1'3 (1'4 (1'5
lD lD (J' (1'2 (1'3 (1'4 (1'5
(J' (J' (1'2 (1'3 (1'4 (1'5 1D
(1'2 (1'2 (1'3 (1'4 (1'5 1D (J'
(1'3 (1'3 (1'4 (1'5 lD (J' (1'2
(1'4 (1'4 (1'5 lD (J' (1'2 (1'3
(1'5 (1'5 1D (J' (1'2 (1'3 (1'4
D Multiplication Table
Cross-Section is a homomorphism.

Group em.
This group is case one. So 3! E 1,., say t = ( ~ ). and
3r E 1;, , say r = ( 2J . Then s = !t + !r is also in A,
and t, s form a basis for A.
Point Group:
D = {lv, Pt}
Generators for MD (with respect to t,s):
M,, = [~ !l]
Multi:~ :ication in D: lD
lv lD
Pt Pt
Diagram 4.6
Pt
Pt
lv
D Multiplication Table
Cross-Section is a homomorphism.
27

Group pm.
This is case 2(a) with only one reftection, Pt· t = ( ~1 )
and s = ( ~2 ) generate A for some nonzero k1 , k2 •
Point Group:
D = {lD, Pl}
Generators for MD (with respect to t, s):
M,, = [~ ~1]
Multi:~lication in D: ln
ln
P1 P1
Diagram 4.7
P1
P1
lD
D Multiplication Table
Cross-Section is a homomorphism.
28

Group pg.
This is case 2(b) with only one reflection. As in group
pm, t = ( ~ ) and s = ( 22
) generate A for some
nonzel'o k1 , k2.
For the cross-section, there is avE R 2 with v+p1(v) = t, and so v = ( !~1 ) for some 1:3 . Then, (p1, v) E G.
Point Group:
D = {lv, Pl}
Generators for MD (with respect to t, s):
Mp, = [~ ~1]
Multir lication in D:
Diagram 4.8
lv P1
P1 P1
D Multiplication Table
Cross-Section Generators:
29
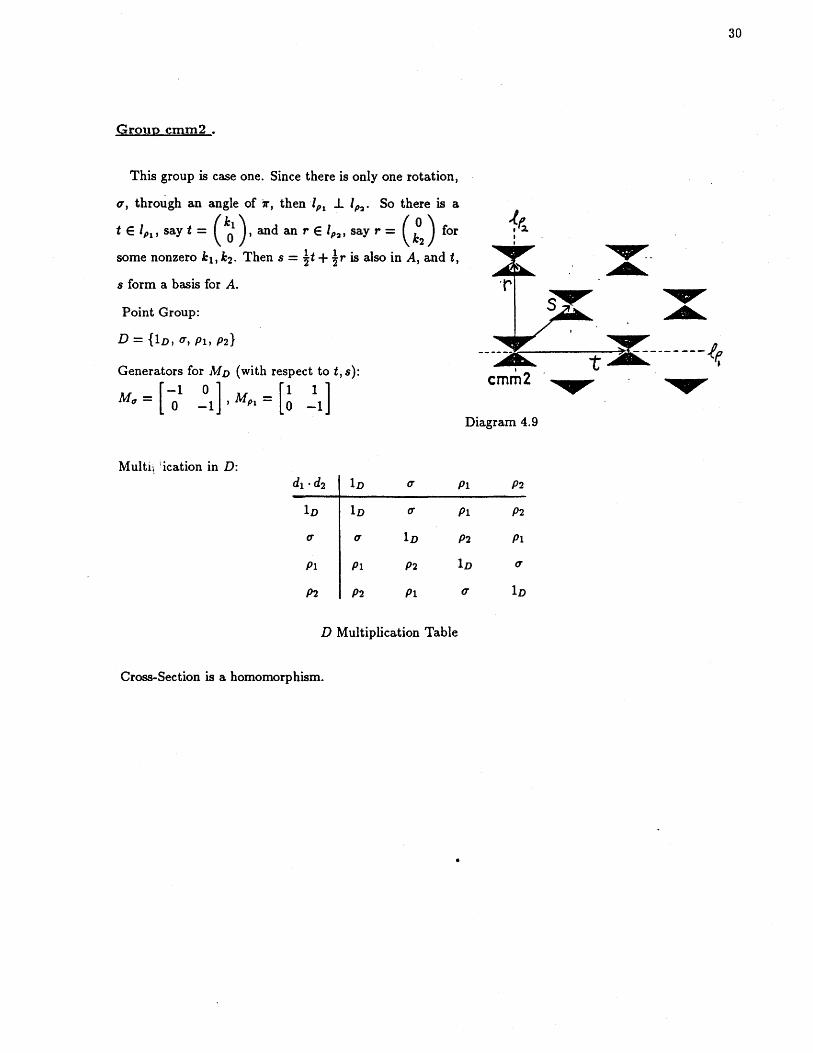
Group cmm2.
This group is case one. Since there is only one rotation,
u, through an angle of ?r, then lp1 J. lp,· So there is a
t E 1,., say t = ( ~ ) , and an r E 112 , say r = ( 22
) for
some nonzero k11 k2. Then s = !t + !r is also in A, and t,
s form a basis for A.
Point Group:
D = {lv, u, Pl, P2}
Generators for MD (with respect to t,s):
[ -1 0 ] [1 1 ] M (7 = 0 -1 , M Pl = 0 -1
"'--•
• • -:r---t I:-------.ef.
cmm2 • 4
Diagram 4.9
Multi\ 'ication in D: 1v
1D 1v
lD
Pl P1 P2
P2 P2 Pl
D Multiplication Table
Cross-Section is a homomorphism.
Pl
Pl
P2
lD
P2
P2
Pl
1D
30
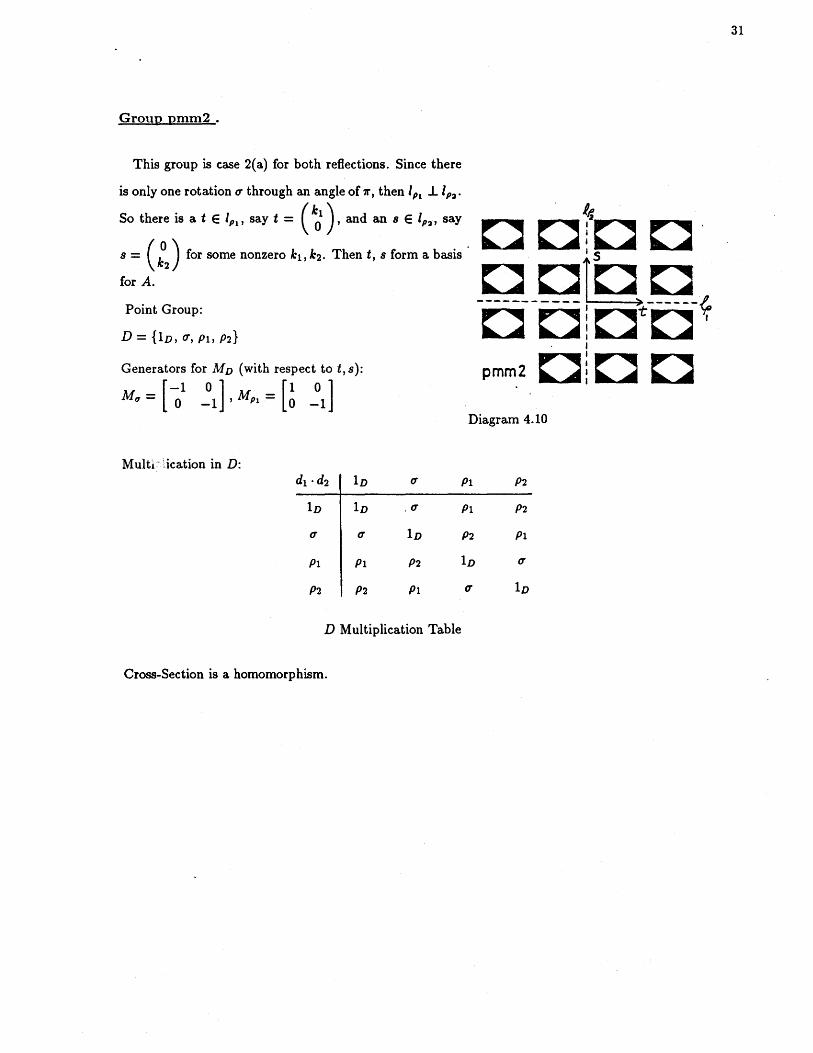
Group pmm2.
This group is case 2(a) for both reflections. Since there
is only one rotation u through an angle of 1r, then l p 1 1.. l p2 •
So there is at E 1,., say t = ( ~), and an s E 1,,, say
s = ( ~2 ) for some nonzero k1o k2. Then t, s form a basis ·
for A.
Point Group:
D = {1v, u, Pt, P2}
Generators for Mv (with respect to t,s):
[-1 0 ] [1 0 ] M (1 = 0 -1 , M Pl = 0 -1
Diagram 4.10
Mult1"· tication in D: 1v Pt P2
,(f Pt P2
lv P2 P1
Pl Pl P2
P2 P2 Pl
D Multiplication Table
Cross-Section is a homomorphism.
31

Group pmg2.
This group is a combination of cases 2( a) and 2(b). Since
there is only one rotation rr through an angle of 1r, then
lp, .l lp,· So there is at E lp,. say t = ( ~). and an
s E 1,., says= (~2 ) for some nonzero .1:,,.1:2. Then t, s
form a basis for A.
One of the reflections, say p1, exhibits a glide (case 2(b)).
_So,_there is a vector u in R 2 such that u+p1(u) = t. Thus,
u = ( ~~1 ) works here. The reflection 1'2 is then case
2(a), so there is a vector v E R 2 such that v + P2(v) = 0,
and so v = ( ~) works here .. Hence, (p,, u), (p2, v) are
in G, and they generate a cross-section of D.
Point Group:
D = {lD, rr, Pll P2}
Generators for MD (with respect tot, s):
[-1 0 ] [1 0 ] Ma = 0 -1 ' MPl = 0 -1
.l ,f. I
) ):t (
'U (
-~------~-~ I
pmg2 I( .,
Diagram 4.11
Multi ication in D: dt·d2 lD (T Pl P2
lD lD (T P1 P2
(T (T lD P2 P1
Pl Pl P2 lD (T
P2 P2 P1 (f' lD
D Multiplication Table
Cross-Section Generators:
;(p,) = ( Mp,' 0)) ;(1'2) = ( M,., (~) )
32
) (
5 -----.f. ~
(

Group pgg2.
This group is case 2(b) for both reflections. Since there
is only one rotation u through an angle of 1r, then 1 p1 ..L 1 p2 •
So there is at E 1,., say t = ( ~), and an s E 1,,, say
8 = ( ~2 ) for some nonzero 1:, , l:2. Then t, 8 form a basis
for A.
Each of the reflections exhibits a glide (case 2(b )). So,
there are vectors u and v in R 2 such that u + p1 ( u) = t
and v+ p2(v) = s. In fact u = v = ( t:~) may be used
here. Hence, (Pt, u), (p2, v) are in G and they
generate a cross-section of D.
Point Group:
D = {1D, u, Pl, P2}
Generators for MD (with respect tot, s):
[-1 0 ] [1 0 ] Mu = 0 -1 , MPl = 0 -1
~ pgg2
Diagram 4.12
Multi ,oication in D: dt·d2 lD q Pl P2
lD lD (T P1 P2
q (T 1D P2 Pl
Pl P1 P2 lD (T
P2 P2 Pl (T lD
D Multiplication Table
Cross-Section Generators:
'Y(Pt) = MP11 ( (--2~1))
.ff.. 12. I I I
33

Group p31m.
As usual, pick t on 1,., say t = ( ~ ). Then r may
be chosen on l p2 as r = ( ~k1 ) • Then, similarly to the
2 kl centered case, one has s =it+ iris an element of A, and
t, s form a basis for A.
Point Group:
D = {lD, u, u2, Pl! P2, P3}
Generators for Mn (with respect tot, s):
[-2 -1] [1 1 ] M(T = 3 1 ' Mp1 = 0 -1
Diagram 4.13
MultJ;· ication in D: dt ·d2 1n (f (!2 Pt P2
lD In (f (!2 Pt P2
(f (f (!2 ln P2 P3
(!2 (!2 ln (f P3 P1
Pl Pt P3 P2 lD (!2
P2 P2 Pt P3 (f lD
P3 P3 P2 Pt (!2 (f
D Multiplication Table
Cross-Section is a homomorphism.
34
P3
P3
Pt
P2
(f
u2
ln

Group p3ml.
This group is case 2(a). Choose ton I,, say t = ( ~1 ).
Then 8 may be chosen on lp, as 8 = ( !k1
) , and t, 8 2 kl
form a basis for A.
Point Group:
D = {lv, 0', 0'2 , P1, P2, P3}
Generators for Mv (with respect tot, 8):
[ -1 -1] [1 1 ] Mu = 1 0 ' MPl = 0 -1
Diagram 4.14
Multi .. i ication in D: dl -d2 1v (J' (1'2 P1 P2
1v 1v (J' (1'2 P1 P2
(J' (J' (1'2 1v P2 P3
(1'2 (1'2 lv (J' P3 P1
Pl Pl P3 P2 1v 0'2
P2 P2 Pl P3 (J' lv
P3 P3 P2 P1 0'2 (J'
D Multiplication Table
Cross-Section is a homomorphism.
35
P3
P3
P1
P2
(J'
0'2
1v
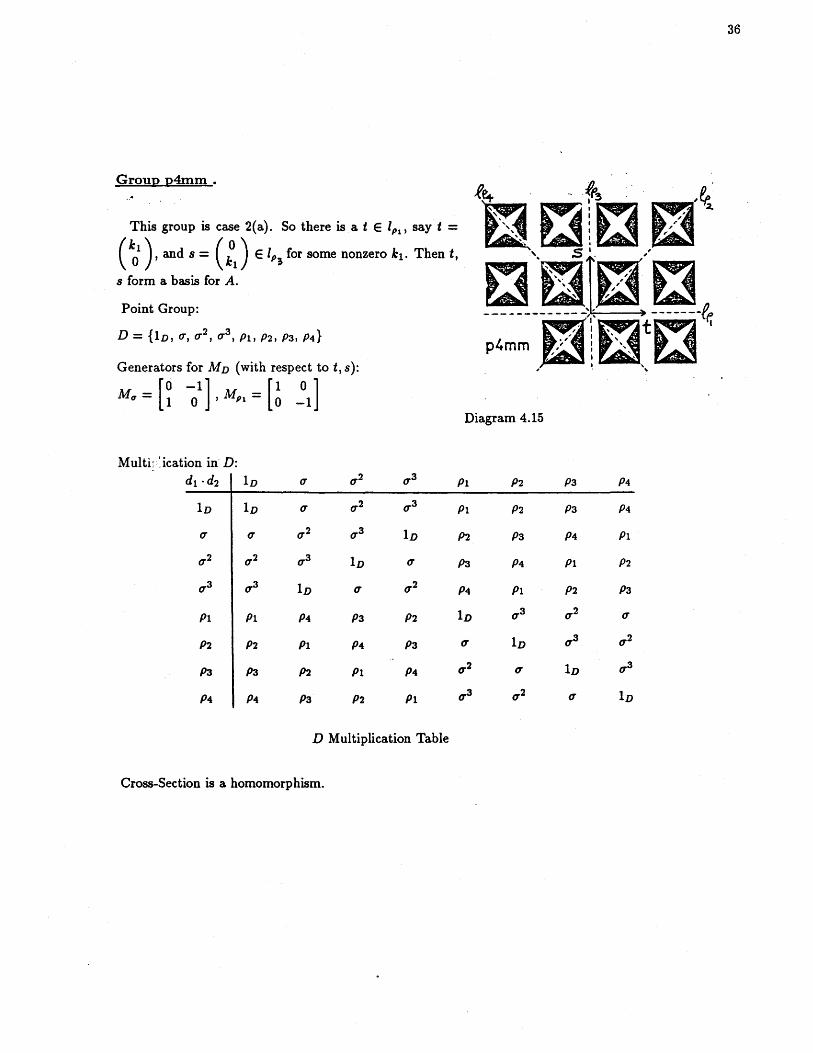
Group p4mm.
This group is case 2(a). So there is at E lPtt say t = c=~ ). and s = ( ~J E 1 p~ for some nonzero k1. Then t,
s form a basis for A.
Point Group:
Generators for Mv (with respect tot, s):
[0 -1] [ 1 0 ] Mu = 1 0 ' MP1 = 0 -1
Diagram 4.15
Multi;<ication in D: dl ·d2 lv (f (!2 (!3 Pl P2
lv lv (f (!2 (!3 Pt P2
(f (f (!2 (!3 lv P2 P3
(!2 (!2 (!3 lv (f P3 P4
(!3 (!3 lv (f (!2 P4 Pt
Pl Pl P4 P3 P2 1D (!3
P2 P2 Pt P4 P3 (f lD
P3 P3 P2 Pl P4 (f2 (f
P4 P4 P3 P2 Pl ~ (!2
D Multiplication Table
Cross-Section is a homomorphism.
36
P3 P4
P3 P4
P4 Pt
Pl P2
P2 P3
(!2 (f
(!3 (f2
lD u3
(f 1v

Group p4mg.
This is case 2(b ), and A is a square lattice. So one can
choose the basis t = ( ~), and s = UJ for some
nonzero k~, and t, 8 are a basis for A.
Now, for the cross-section, suppose, without loss of gen-
erality, one of the glide reflections is on p1 , so we have c~e
2(b). Then 3v E R 2 such that v+p(v) = t, so v = ( t::) may be used. Then (p1, v) E G. Let r = 8 +t. Since rison . .e'r3
I
lp~, and this is not a glide-reflection axis, we have case 2( a). ' ..... ~ I I I I
s' So there is au E R 2 such that u + p2 (u) = 0, and thus
u E 1,, .L. So u = ( ~) wor~ here, _, and (P2, u) E G.
These two elements of G will generate a cross-section.
Point Group:
. ,,.,. f~,
. ' ' ',,, ~
37
..... ~ fe, ~ ,.,. /,/ 2.
//~ ..... "' ~,
~ ~--.,, __ _
------ ________ :::..JC-----~-- ft. ~ ~ /r', t . • ., ,.. / : ', , ' p4sm /, I ',,
Generators for MD (with respect to t,8):
[0 -1] [ 1 0 ] Mu = 1 0 , MP1 = 0 -1
Diagram 4.16
Multi:· ication in D: dl-d2 lD (f (/2 (/3 P1 P2 P3 P4
lD lD (f (/2 (/3 P1 P2 P3 P4
(f (f (/2 (7'3 lD P2 P3 P4 P1
(7'2 (7'2 (7'3 lD (7' P3 P4 P1 P2
(7'3 u3 lD (7' (7'2 P4 P1 P2 P3
P1 Pt P4 P3 P2 lD (7'3 (7'2 (7'
P2 P2 Pl P4 P3 (7' lD (7'3 (7'2
P3 P3 P2 Pt P4 (7'2 (7' lD (7'3
P4 P4 P3 P2 P1 (7'3 (7'2 (7' lD
D Multiplication Table
Cross-Section Generators:
7(Pt) = ( M,., (t)) 7(1'2) = ( M, •• (n)

38
. t .fr~ ..(~ '+ /
Group p6mm. ~~~~~~~~ "" -,~i~~i~ ~/ ~~ c) ck,) Case 2(a) applies. t = ~ and s = 4k
1 forms a -~~!~~~~-~~~-~f.
basis for A, for some nonzero k1.
~~~~~:~~~~~I Point Group: ---~ ~ r~:~~ ~ ,_ D _ {l 2 3 4 s } - D, u, u , u , u , u , Pl, P2, P3, P4, Ps, Ps . p6mm / 1 \
~~~l~~~~ Generators for Mv (with respect tot, s): \
Ma = [~ -1] [1 ~1] 1 , MPl = 0
Diagram 4.i7
Multip~ication in D: dl. d2 lD (j u2 (j3 (j4 (j5 Pl P2 P3 P4 Ps Ps
lv lv (j (j2 (j3 (j4 us Pl P2 P3 P4 Ps Ps
(j (j (j2 (j3 (j4 us lD P2 P3 P4 Ps Ps Pl
(j2 (j2 (j3 (j4 (j5 lD (j P3 P4 Ps Ps Pl P2
(7'3 (j3 (j4 us lv (7' u2 P4 Ps Ps P1 P2 P3
.,.4 (7'4 (j5 lD (7' u2 (7'3 Ps Ps P1 P2 P3 P4
.,.s us lD (j (7'2 (7'3 (7'4 P6 Pl P2 P3 P4 Ps
Pl Pl P6 Ps P4 P3 P2 lD .,.s (7'4 (j3 (j2 (7'
P2 P2 P1 Ps Ps P4 P3 (7' lv .,.s (7'4 (j3 (j2
Pa Pa P2 P1 P6 Ps P4 (7'2 (j lD .,.s (j4 .,.a
P4 P4 Pa P2 Pl P6 Ps .,.a u2 (7' lD .,.s (7'4
Ps Ps P4 Pa P2 Pl Ps (7'4 .,.a (7'2 (j lD .,.s
Ps P6 Ps P4 P3 P2 Pl .,.s (7'4 .,.a u2 (j lD
D Multiplication Table
Cross-Section is a homomorphism.

Chapter 5 The C*-Algebra of a Group
with Abelian Normal Subgroup of Finite Index
In this chapter we consider the group C*-Algebra C*(G) of a locally compact group G which has
an abelian normal subgroup A of finite index. There are two aims to this chapter. The first aim,
which is addressed in section I, is to write down an explicit description of c• (G) . This description
turns out to be a simple matrix formula which will be used in the next chapter to calculate the
group C*-algebra C*(G) . The second aim of this chapter is to reduce the problem of irreducible
representations of C*(G) to the finite dimensional C*-Algebra case. The reduction is accomplished
by identifying C* (G) with the full algebra of sections on a certain C*-Bundle and applying the
representation theory for bundles from chapter 3. The second aim is addressed in sections II and
III.
The major theorems and most of the (hard) body pertaining to the first aim of this chapter come
from a recent preprint of [14]. In the paper, an explicit matrix formulation for the C*-Algebra of
any locally compact group G which has an abelian normal subgroup A of finite index is derived. The
major result is the existence of an injective homomorphism {3 from the finite group D:=G I A into
the automorphism group AUT(Mn(Co(A))) (where A is the pontyagrin dual of the abelian subgroup
A, and M0 (Co(A)) is the nxn matrices with entries from C0 (A)) with respect to which C*(G) is
isomorphic to the fixed point algebra M0 (Co(A))0 :={FE M0 (C0 (A)) 1: {3(d)F = F, Vd ED}.
As noted in chapter four, any crystallographic group G fits the exact sequence
A~ G.!!.. D(= GIA)
with A maximal abelian and normal in G, and D finite, so the matrix formulation to be derived for
C* (G) will be applicable to any crystal group. Although the theorems and results would simplify
in the crystal group case (for example A~ zn for some integer n), this chapter will list the required
results in the generality suggested by the title.
! The group C*-algebra C*(G).
Throughout this section G will be a group, A an abelian normal subgroup of finite index in G, and
G I A .!!.. D the finite quotient group. Recall from chapter three the fixed Haar measure on abelian
A, the pontyagrin dual A , and the maps involved in the identification of C* (A) with C0 (A) . Fix
a cross-section 1: D-+ G (that is:p o 1 = idv) which, without loss of generality, fixes the identities
39

(;(ln) = la). Then, A-cosets in G may be denoted ;(d)A. Note that ; may not in general be
a homomorphism. {It is, in fact, the "distance" of; from a homomorphism that determines the
crystal group class of a crystal group G.)
Since A is normal in G, there is a natural action of D on A defined by "pull-back and conjugation":
for d E D, a E A,
d.a: = ;(d)a;{d)-1
= a';(d);(d)- 1 =a'
for some a' E A since A is normal. Note that the above action is independent of the particular
cross-section, for if 6 : D ~ G were another cross-section, then ford E D, 6(d) E ;(d)A by definition
of cross-section, so 6(d) = ;(d)a for some a E A, and so forb E A, 6(d)b6(d)- 1 = ;(d)aba-1;(d)-1 =
;(d)b;(d)- 1 (since A is abelian).
Since ; is a cross-section, ;(de) resides in the A-coset for de in G for each pair d, e E D. Thus
3a(d, c) E A such that ;(d);( c) = ;(dc)a(d, c). It will be shown that a : D x D ~ A is a 2-
cocycle ( cohomologically speaking) and that G ~ { ( d, a) I: d E D, a E A} when given group product
(d, a)(e, b) := (de, a(d, c)(e- 1 .a)b). Note that we already have G ~ {;(d)a 1: dE D, a E A} by coset
decomposition.
With the above action of Don A, the Haar measure on G will be built from that of A. Equipped
with an explicit connection between the measures on A and G, one can form L 1(G) , L 2(G) , and
ultimately connect C*(G) with M0 (C0 (A)) . But first, Gin coset-decomposition form is identified
with the above alternative form.
PROPOSITION. With the above product, let G' .- {(d, a) 1: d E D, a E A}. Then G' ~ G :=
{;(d)a 1: dE D,a E A} via t.p(d,a) := ;(d)a.
PROOF: Let (d,a),(e,b) E G'. Then for homomorphism note
(d,a)(c,b) = (de,a(d,c)(c- 1 .a)b)
.:!!.. ;(de)a(d, c)(c-1.a)b
= ;(de)a(d, e)a(c- 1 , e)- 1a(c-1 , e)(c- 1 .a)b
(A commutative)= ;(de)a(d, c)a(c-1 , c)- 1(e- 1 .a)a(e- 1 , e)b
(definition of a) = ;( d);(e)a( d, c)- 1a( d, c);{ c)-1;( c- 1 )- 1 (c- 1.a);(c-1 );(e)b
(defn of D-action) = ;(d);(e- 1)- 1;(e-1)a;(c- 1)- 1;(e- 1);(c)b
= ;(d)a;(e)b
= t.p( d, a )t.p( c, b) as required.
40

For injection note that if <p( d, a) = <p( c, b) then "Y( d) a = "Y( c )b, so by A-coset decomposition of G,
"'f(d) and "Y(c) are in the same coset, so d = c by projection, and then a=b. So (d, a) = (c, b).
Surjection is obvious.
PROPOSITION. The function a : D x D -+ A satisfies the 2-cocycle identity:
a(b, cd)a(c, d) = a(bc, d) d- 1.a(b, c)
for all b, c, dE D (using the above D-action on A).
PROOF: Simply calculate:
a(b,cd)a(c,d) := "'f(bcd)- 1r(b)i(cd)i(cd)- 1"Y(c)"Y(d)
= "'f(bcd)- 1"'1( bc)"'f(bc)- 1"Y(b )"Y( c)"Y( d)"Y( d-1 )"Y( d- 1 )-
1
= -y(bcd)- 1"Y(bc)a(b, c)a(d, d-1 )"Y(d- 1 )-
1
( commutivity in A) = i(bcd)- 1r(bc)a(d, d-1 )a(b, c)"Y(d- 1 )-
1
= "'f(bcd)- 1"Y(bc)"'f(d)"Y( d-1 )a(b, c)r(d- 1 )-
1
=a( be, d) d- 1 .a(b, c)
Thus A, D, the action of Don A, and the 2-cocycle a determine G (upto isomorphism). The no
tation used for G elements will be which ever is most convenient for the purpose. Before introducing
the Haar measure on G, a preliminary lemma is required.
LEMMA. The action of Don A does not affect the Haar measure on A. That is, if IE Coo( A) (the
continuous functions of compact support A-+ C) and dE D, then fA l(d.a)da =fA l(a)da.
PROOF: Define the function J : C00 (A) -+ C by J(l) := fA l(d.a)da (VI E Coo(A)). Then for
I E Coo(A) and any b E A, the translate by b is defined by /b(a) := l(ab) (Va E A). We have
lb E Coo(A), too, and
J(/b) := L t.(d.a)da = L f((d.a)b)da
= L l(d.(a(d- 1 .b)))da (by group-action,)
= L f(d.(a))da (by translation-invariance of Haar on A,)
= J(l)
so J is translation-invariant. J is obviously linear and positive, hence a positive invariant lin-
ear functional on C00 (A). So by the uniqueness of Haar measure on A, 36(d) > 0 such that
41
6(d) fA l(a)da = J(l) = fA l(d.a)da. 6 is a homomorphism of D into (R+, ·) since for any
I E Coo(A), 6(c)6(d) fA l(a)da = 6(c) fA l(d.a)da = fA l(cd.a)da = 6(cd) fA l(a)da. But since
Dis finite, 6(d) = 1 Vd ED. Thus fA l(d.a)da =fA l(a)da, as required.
For any I: G--+ C and dE D, define ld: A--+ C by ld(a) := I("Y(d)a). The Haar measure on G
is given by
f l(z)dz := L 1 ld(a)da. jG dED A
PROPOSITION. The above equation defines a left and right translation-invariant Haar measure on
G.
PROOF: Left-invariance is shown forgE G written g = 1(c)b for some c E D,b EA.
f l(gx)dz := L 1 I("Y(c)b"'f(d)a)da jG dED A
(defn of a)= L 1 l("'f(C)"'f(d)"'f(d- 1 )a(d,d-1)-
1b"'((d)a)da dED A
(commute in A)= L 1 l("'f(C)"'f(d)"Y(d-1 )ba(d,d-1)-
1"Y(d)a)da dED A
(defn of a)= L 1 I("Y(c)"'f(d)"'f(d- 1 )b"'f(d- 1)-
1a)da dED A
(defn of D-action and a)= L 1 I("Y(cd)a(c, d)(d- 1 .b)a)da dED A
(chng var: a'= a(c,d)(d- 1 .b)a) = L 1. I("Y(d)a)da dED A
=: Ll(z)dz
showing left-in variance. Right-invariance is similar.
Let U : L2 (G) --+ LdeD EBL2 (A) be defined by U(h) := (hd)deD for h E L2 (G). By above
definition of Haar measure on G, each hd E L2 (A).
PROPOSITION. U: L2(G)--+ LdeD EBL2(A) is an isometric isomorphism.
PROOF: Linearity, injection and surjection are trivial. To show U is unitary, let h E L2(G). Then
by definition of Hilbert direct-sum norm (2.1) IIU(h)ll~ = LdeD llhdll~ = LdeD fA I h(1(d)a) 12
da = fG I h(z) 12 dz =: llhll~ by definition of Haar measure on G.
In view of the above U and the isometry P : L2 (A) ~ L2(A) from 3.111, we now have the isometry
\II of L2 (G) and 1i := LdeD EBL2(A) given by \11(1) := (P(Id))deD for each IE L2 (G). Each element
of LdeD EBL2 (A) (or LdeD EBL2(A) ) can be considered as a vector b.:= (hd)deD for hd E L2 (A)
(or L 2 (A)).
42
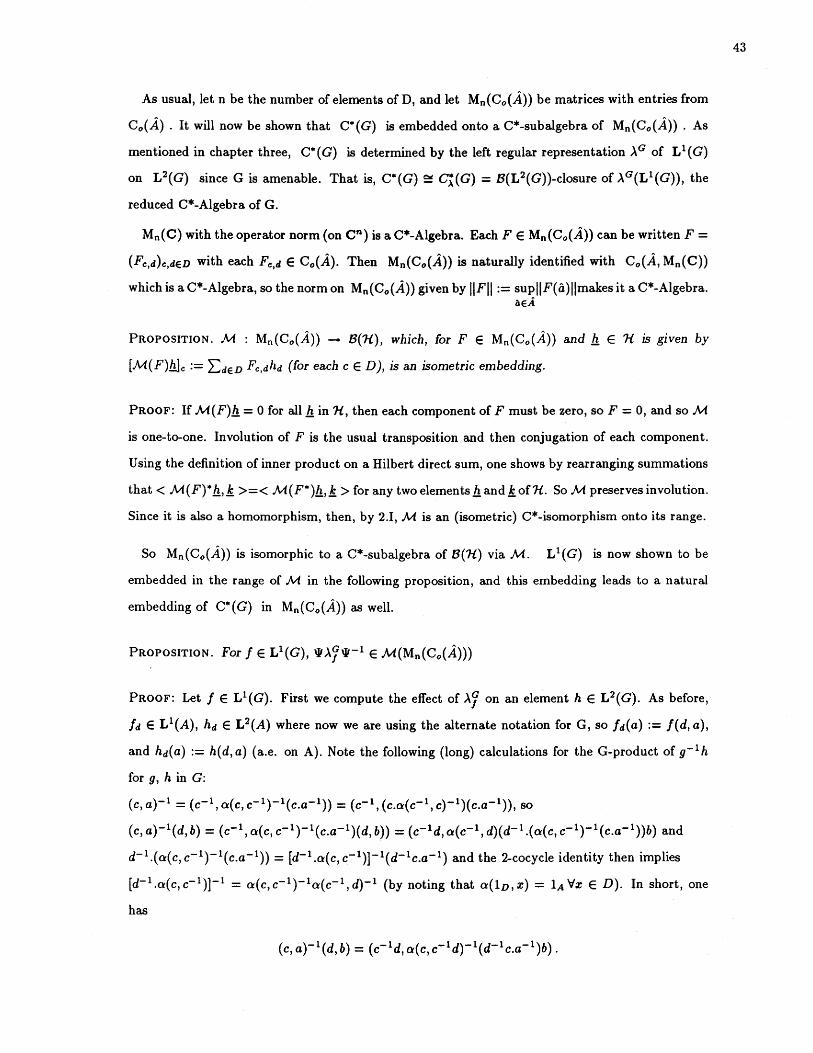
As usual, let n be the number of elements of D, and let Mn(Co(A)) be matrices with entries from
Co(A) . It will now be shown that C*(G) is embedded onto a C*-subalgebra of Mn(Co(A)) . As
mentioned in chapter three, C* (G) is determined by the left regular representation ,\ G of L 1 (G)
on L2(G) since G is amenable. That is, C*(G) ~ C~(G) = B(L2(G))-closure of ,\G(L1(G)), the
reduced C*-Algebra of G.
Mn(C) with the operator norm (on C") is a C*-Algebra. Each FE Mn(Co(A)) can be written F =
(Fc,d)c,dED with each Fc,d E Co(A). Then Mn(Co(A)) is naturally identified with Co(A, Mn(C))
which is a C*-Algebra, so the norm on Mn(Co(A)) given by IIFII := supiiF(a)llmakes it a C*-Algebra. ae.A
PROPOSITION. M : Mn(Co(A)) -+ 8(1i), which, for F E Mn(Co(A)) and fl E 1i is given by
[M(F)l!Jc := LdeD Fc,dhd (for each c ED), is an isometric embedding.
PROOF: If M(F)fl = 0 for all h. in ?i, then each component ofF must be zero, so F = 0, and so M
is one-to-one. Involution ofF is the usual transposition and then conjugation of each component.
Using the definition of inner product on a Hilbert direct sum, one shows by rearranging summations
that< M(F)*fl,! >=< M(F*)ll,! >for any twoelementsfland!of?i. So M preserves involution.
Since it is also a homomorphism, then, by 2.1, M is an (isometric) C*-isomorphism onto its range.
So Mn(Co(A)) is isomorphic to a C*-subalgebra of 8(1i) via M. L 1 (G) is now shown to be
embedded in the range of M in the following proposition, and this embedding leads to a natural
embedding of C*(G) in Mn(Co(A)) as well.
PROPOSITION. For f E L 1(G), w..\yw-1 E M(Mn(Co(A)))
PROOF: Let f E L 1(G). First we compute the effect of ,\Y on an element h E L 2(G). As before,
/d E L 1(A), hd E L 2 (A) where now we are using the alternate notation for G, so /d(a) := f(d, a),
and hd(a) := h(d, a) (a.e. on A). Note the following (long) calculations for the G-product of g- 1 h
for g, h in G:
(c, a)- 1 = (c- 1 , a(c, c- 1 )- 1(c.a- 1 )) = (c- 1 , (c.a(c-1 , c)- 1 )(c.a-1 )), so
( c, a)- 1(d, b) = (c- 1, a(c, c-1 )-1(c.a-1 )(d, b)) = (c- 1d, a(c- 1, d)(d- 1 .(a(c, c- 1 )- 1 (c.a- 1 ))b) and
d- 1.(a(c,c- 1)- 1(c.a- 1)) = [d- 1.a(c,c-1)]- 1(d-1c.a- 1) and the 2-cocycle identity then implies
[d- 1 .a(c,c-1)]- 1 = a(c,c- 1)- 1a(c- 1,d)-1 (by noting that a(ln,x) = lA Vx ED). In short, one
has
43
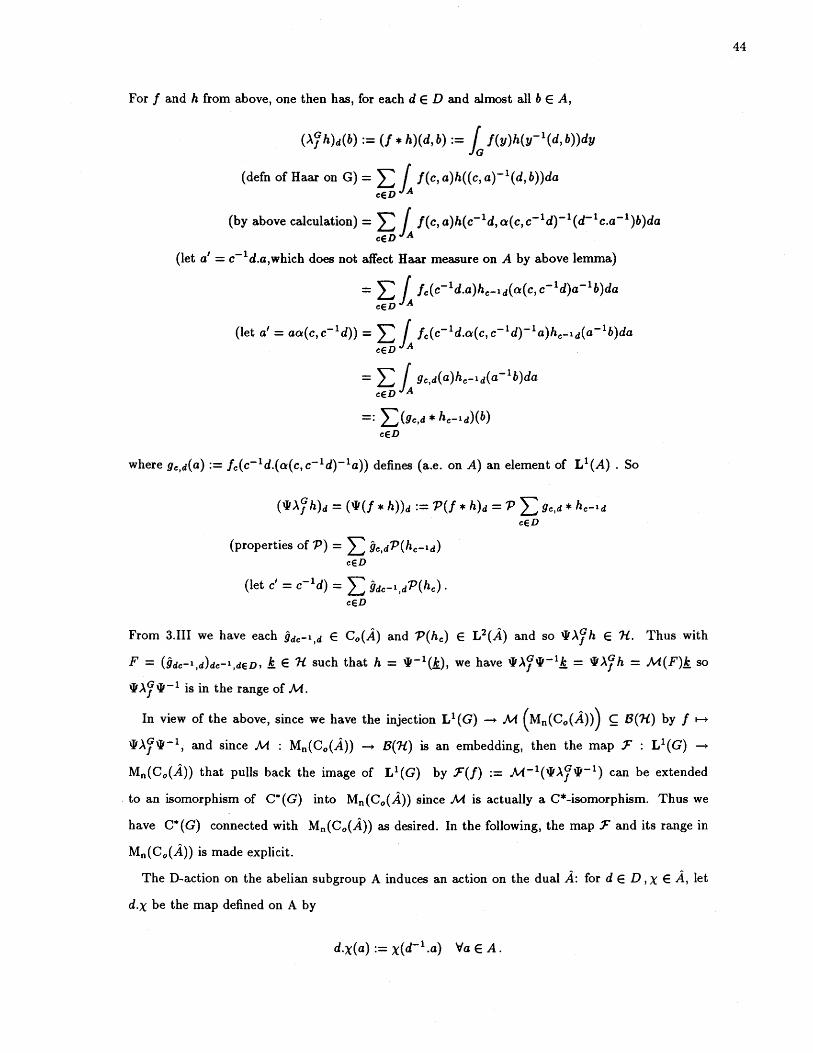
For I and h from above, one then has, for each d E D and almost all b E A,
(>.7 h)d(b) ==<I. h)(d, b) == L l(y)h(y- 1(d, b))dy
(defn ofHaar on G)= I: f l(c,a)h((c,a)- 1(d,b))da cEDjA
(by above calculation)= I: 1 l(c, a)h(c- 1d, a(c, c-1d)- 1(d-1c.a-1 )b)da cED A
(let a'= c-1d.a,which does not affect Haar measure on A by above lemma)
= I: { lc(c- 1d.a)hc-td(a(c, c- 1d)a- 1b)da ceDJA
(let a'= aa(c, c- 1d)) = L f lc(c- 1d.a(c, c-1d)- 1a)hc-ld(a- 1b)da cED }A .
= L { 9c,d(a)hc-td(a- 1b)da ceDJA
=: L(9e,d * hc-ld)(b) cED
where 9c,d(a) := lc(c- 1d.(a(c, c- 1d)- 1a)) defines (a.e. on A) an element of L1 (A) . So
('l!>.}h)d = ('1!(1 * h))d := P(l * h)d = P L 9c,d *he-ld
(properties of P) = L Uc,dP(hc-ld) cED
(let c' = c- 1d) = L Udc-I,dP(hc) · cED
cED
From 3.III we have each Udc-l,d E Co(A) and P(hc) E L2 (A) and so 'l! >..7 h E 11,. Thus with
F = (Udc-t,d)dc-t,deD,! E 1l such that h = w- 1(!), we have w>..r'l!- 1/i = 'll>..7h = M(F)£ so
w>..r'l!-1 is in the range of M.
In view of the above, since we have the injection L1(G) -+ M (Mn(C0 (A))) ~ 8(1l) by I~
'l!>..f'l!-1, and since M : M0 (C0 (A)) -+ 8(1l) is an embedding, then the map :F : L1(G) -+
M0 (C 0 (A)) that pulls back the image of L1 (G) by :F(I) := M-1('l!>..f'l!- 1 ) can be extended
. to an isomorphism of C*(G) into M0 (C0 (A)) since M is actually a C*-isomorphism. Thus we
have C*(G) connected with M0 (C0 (A)) as desired. In the following, the map :F and its range in
M0 (C 0 (A)) is made explicit.
The D-action on the abelian subgroup A induces an action on the dual A: for dE D, X E A, let
d.x be the map defined on A by
d.x(a) := x(d- 1 .a) Va EA.
44
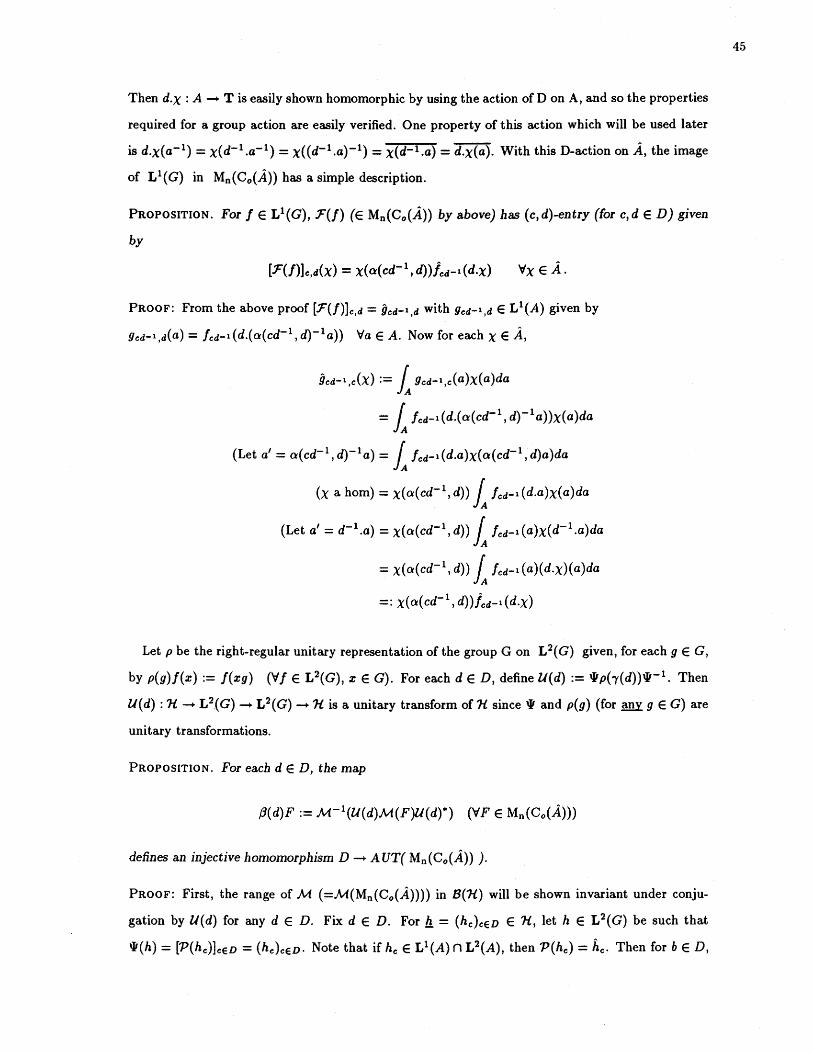
Then d.x: A---+ Tis easily shown homomorphic by using the action of Don A, and so the properties
required for a group action are easily verified. One property of this action which will be used later
is d.x(a-1) = x(d-1.a-1) = x((d-1.a)-1) = x(d-1.a) = d.x(a). With this D-action on A, the image
of L1(G) in Mn(Co(A)) has a simple description.
PROPOSITION. For f E L1(G), :F(f) (E Mn(Co(A)) by above) has (c, d)-entry (for c, dE D) given
by
Vxe.A.
PROOF: From the above proof [:F(/)]e,d = 9ed-1,d with Ued-l,d E L1(A) given by
Ued-l,d(a) = /ed-l(d.(a(cd-1,d)-1a)) Va EA. Now for each X E A,
9ed-l,e(X) := L Ued-l,e(a)x(a)da
= L /e•-•(d.(o(ctl 1, d)- 1a))x(a)da
(Let a' = a(cd- 1, d)- 1a) = L !ed-1 (d.a)x(a(cd-1, d)a)da
ex a hom)= x(a(cd_,. d)) L 'e·-· (d.a)x(a)da
(Let a'= d- 1.a) = x(a(cd- 1 ,d)) L !ed-1(a)x(d- 1 .a)da
= x(a(cd- 1 ,d)) L ,ed-l(a)(d.x)(a)da
=: x(a(cd- 1, d))ied-l(d.x)
Let p be the right-regular unitary representation of the group G on L 2( G) given, for each g E G,
by p(g)f(x) := f(xg) (Vf E L2(G), x E G). For each dE D, define U(d) := 'lip("Y(d))w- 1 • Then
U (d) : 1-l ---+ L 2( G) ---+ L 2 (G) ---+ 1-l is a unitary transform of 1-l since w and p(g) (for any g E G) are
unitary transformations.
PROPOSITION. For each dE D, the map
f3(d)F := M- 1(U(d)M(F)U(d)*) (VF E Mn(Co{A)))
defines an injective homomorphism D---+ AUT( M 0 (C0 (A)) ).
PROOF: First, the range of M (=M(Mn(Co(A)))) in 8(1-£) will be shown invariant under conju
gation by U(d) for any d E D. Fix d E D. For l! = (he)eeD E 1-l, let h E L 2{G) be such that
'li(h) = [P(he)]eeD = (he)eeD· Note that if he E L 1(A) n L 2(A), then P(he) =he. Then forb ED,
45
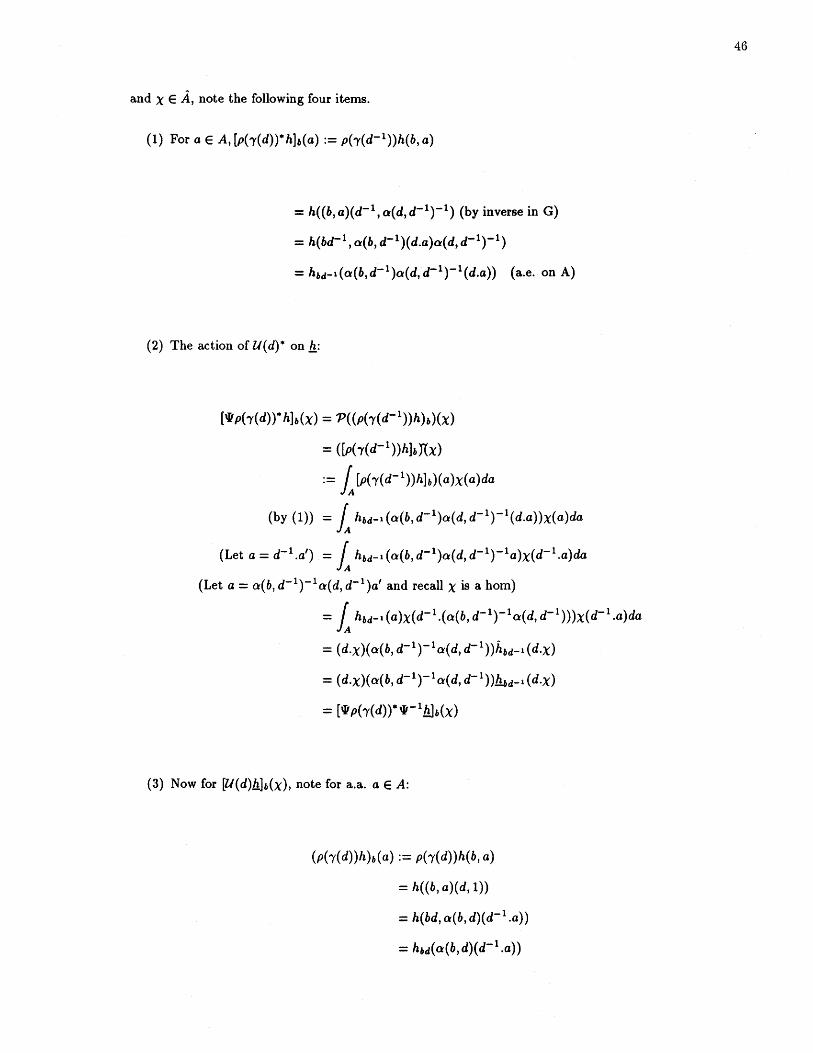
and x E A, note the following four items.
(1) For a E A,[P("Y(d))*h]b(a) := P("Y(d- 1))h(b,a)
= h((b,a)(d-1 ,a(d,d-1)-1 ) (by inverse in G)
= h(bd- 1 , a(b, d-1)(d.a)a(d,d-1)- 1)
= hbd-t(a(b,d- 1 )a(d, d-1)-1(d.a)) (a.e. on A)
(2) The action of U(d)* on fl.:
[wp("Y(d))*h],(x) = P((P("Y(d- 1))h)t,)(x)
= ([P("Y(d- 1))h]b}(X)
:= i [P("Y(d- 1))h]b)(a)x(a)da
(by (1)) = i hbd-t(a(b,d- 1)a(d,d-1)-
1(d.a))x(a)da
(Let a= d- 1.a') = i hbd-' (Ot(b,d- 1)0t(d, d- 1)-
1a)x(d-1.a)da
(Let a= a(b,d- 1)-
1a(d,d-1 )a' and recall xis a hom)
= i hbd-' (a)x(d- 1 .(01(b, d- 1 )-
101(d, d- 1 )))x( d- 1.a)da
= (d.x)(a(b, d- 1 )-
1a(d, d- 1 ))hbd-• (d.x)
= (d.x)(a(b, d-1 )-1a(d, d-1 ))&d-• (d.x)
= [w p( "Y( d))* q,- 1 hh(x)
(3) Now for [U(d)h]b(x), note for a.a. a E A:
(P("Y(d))h)b(a) := P("Y(d))h(b, a)
= h((b, a)(d, 1))
= h(bd,a(b,d)(d- 1 .a))
= hbd(a(b,d)(d- 1 .a))
46

= ['lfp("'f(d))h]b(X)
= ([P("Y(d))h]b)(X)
= L hbd(a(b, d)(d- 1 .a))x(a)da (by 3)
(Let a= d.a') = L hbd(o:(b, d)a)x(d.a)da
(Let a= a(b, d)-1a') = L h6d(a)x(d.( a(b, d)-'a))da
= x(d.a(b, d))hbd(d- 1.x)
= (d- 1.x)(a(b, d))fh]bd(d- 1.x)
Putting the above together we calculate conjugation by U(d). Let F = (Fe,d]c,dED E Mn(Co(A)).
Then
[U(d)M(F)U(d)*l!]b(x) = (d- 1.x)(a(b, d))[M(F)U(d)* l!]bd(d- 1.x) (by 4)
(defn of M) = (d- 1.x)(a(b, d))(L(Fbd,c)[U(d)*lt]c(d- 1.x) cED
cED
cED
cED
= L(d- 1 .x)(a(b, d)- 1a(c, d))Fbd,cd(d- 1 .x)fh.1c(X) cED
So for appropriate G E Mn(C0 (A)) defined in terms ofF and the factors in the above expression,
one sees conjugation by U(d) leaves the range of M in 8(1i) invariant. Then the action of f3(d) is
seen to be, for F = (Fb,-ch,ceD E Mn(Co(A)),
since M is a C*-isomorphism.
To show f3 is a homomorphism, pick y, z E D, x E A, calculate f3(yz) and f3(y)f3(z):
[f3(yz)F]b,c(X) = (yz)- 1 .x(a(b, (yz))- 1a(c, (yz))) Fb(yz),c(yz)((yz)- 1 .x)
[f3(y)f3(z )F]b,c(X) = (y- 1.x(a(b, y)- 1a(c, y)))((yz)- 1 .x(a(by, z)- 1a(cy, z))) Fbyz,cyz((yz)- 1 .x)
47

and f3 is a homomorphism if these two components are equal. Note that it suffices to show equality
of the scalar factors in these expressions since the matrix positions are the same for each b, c. Using
the definition of D-action on A, it suffices to show:
y.(a(b, y)- 1a(c, y))(yz).(a(by, z)- 1a(cy, z))
= "Y(Y)( a(b, y)- 1a(c, y))"Y(Y)- 1"Y(Y)(z .(a( by, z)- 1a(cy, z)))"Y(Y)- 1
= "Y(Y)(a(b, y)- 1(z.(a(by, z)- 1a(cy, z)[z- 1 .a(c, y)]))"Y(Y)- 1
= "Y(Y)"Y(z)(z- 1 .a(b, y)- 1 )"Y(z)-1"Y(z)a(by, z)- 1a(cy, z)[z- 1 .a(c, y)]"Y(z )-1"Y(Y)-1
= "Y(Y)"Y(z)[a(by, z)(z- 1 .a(b, y)]- 1[a(cy, z)z- 1 .a(c, y)]"Y(z)- 1"Y(Y)-1
= "Y(Y)"Y(z)[a(b, yz)a(y, z)]- 1 (a(c, yz)a(y, z)]"Y(z)- 1"Y(Y)- 1 (apply the 2-cocycle identity)
= "Y(Y)"Y(z)a(y,z)- 1a(b,yz)- 1a(c,yz)a(y,z)"Y(z)- 1"Y(Y)- 1
= "'f(yz)a(b, yz)- 1a(c, yz)"'f(yz)-1"Y(Y)- 1 (by defn of a)
= (yz).(a(b, yz)- 1a(c, yz))"Y(yz)- 1"Y(Y)- 1 , so the arguments to x are equal in the two expressions,
as required. To show f3 is monomorphic, note that for any non-identity dE D, f3(d) will move the
non-zero entry of the standard basis element e6,c to the position (bd, cd) which will be the same as
the position (bd', cd') for {J(d') iff bd = bd'; that is, iff d = d'. So f3 : D ~AUT( Mn(Co(A)) ) is an
injective homomorphism.
PROPOSITION. Using the above monomorphism f3 : D ~AUT( M0 (C 0 (A)) ), the fixed point alge-~ D ~ ~
bra M0 (C0 (A)) :={FE M0 (C0 (A)) 1: Vd ED, {3(d)F = F} is a C*-subalgebra of M0 (Co(A)) and ~ D
the :F extension defined above is a C*-isomorphism of C*(G) with Mn(Co(A)) .
PROOF: First note that the representations p and Aa commute; that is, for IE L1(G) and g E G,
p(g)AY p(g)* = Al. This is because p(g) is unitary for each g e G, and so, for hE L2 (G) and x E G,
(p(g)Ayh)(x) := (Ayh)(xg) := (I* h)(xg) := fa l(u)h(u- 1xg)du = fa l(u)(p(g)h)(u- 1x)du =
1 * (p(g)h)(x) = Al p(g)h(x).
Recall :F(I) := M- 1(wAyw- 1) for IE L1(G). Then for any dE D we have
{3(d):F(I) := M- 1(U(d)M(:F(I))U(d)*)
= M- 1(wp("'f(d))w- 1 M(:F(I))wp("'f(d))*w- 1)
= M- 1(wp("'f(d))w- 1 M(M- 1(wAyw- 1))w P("Y(d))*w-1)
= M- 1('1tp("'f(d))Ay p("'f(d))*w- 1)
= M- 1(wAyw- 1 ) (by above commutativity)
= :F(I)
~ D so :F(I) E Mn(Co(A)) whenever IE L1(G).
48

To show .1"(L1(G)) is dense in M0 (C0 (A))D and, therefore, that the extended .1" maps C*(G) 0 1!!'0
Mn(Co(A))D, we approximate a given, fixed F E M0 (C0 (A))D within a given f > 0 by an image
point of .1". Recall that the C*-norm for F is given by IIFII := supaeA IIF(a)ll· Choose 6 > 0 such
that IIG- Fll < (whenever G e Mn(Co(A)) is such that IIGb,e- Fb,elloo (on A) < 6 (Vb, c e D).
Now for each bED, choose/bE L1(A) such that llfb- Fb,lolloo < 6. Then f E L1(G) by above, A D
where f(b, a) := /b(a) (b E D, a E A). Then .1"(/) e Mn(Co(A)) , and for each b, c E D, note
{3( c ).1"(/) = .1"(/) and /3( c- 1 ).1"(/) = .1"(/), so for x E A,
=I (c.x( a(b, c- 1 )-
1a(c, c- 1 ))x(a(bc- 1, cc- 1 )Jbc-lcc-l (c.x)
- (c.x(a(b, c- 1 )-
1a(c, c-1 ))x(a(bc- 1, cc- 1 )Fbc-l,cc-1 (c.x) I
49
=I (c.x(a(b, c- 1)-
1a(c,c- 1)) II (!be-l - Fbc-l,lo)(c.x) I (since x(a(bc- 1
' cc- 1)) = 1)
:5llfbc-t - Fbe-l,lo)lloo < b (by assumption),
so IIF{/) - Fll < f. Thus any element of M0 {C0 {A))D can be approximated arbitrarily close
in .1"(L1{G)), so .1"(L1(G)) is dense in this fixed point algebra, and the extension of .1" is a C*
isomorphism of C*(G) and M0 (C0 (A))D.
The above proof gives the explicit characterization of C*{G) in Mn(Co{A)) as those elements
consisting of n arbitrary C 0 (A) elements {Fd,lo 1: de D} in the ''first" column (or lD-column),
and the other columns determined by the formula for the {3-invariance,
Fb,e(X) = [f3( c-1 )F] b,e (x)
= c.x(a(b,c- 1)-
1a(c,c- 1))Fbc-l,lo(c.x) Vx e A
which will be used in the sequel to describe C*(G) for each planar crystal group.
II The identification C*(G) ~ r o(E).
The second aim of the chapter will now be addressed. C* (G) will now be tied to the space of
sections r(E) on a certain C*-Bundle E . First, some preliminary notation and definitions must
be given.
Let A/ D denote the space of D-orbits of A given by the D-action on A with the quotient topology.
II.l The tilde bundle E.
DEFINITIONS. Recalling the bundle definitions from 2.111, we further define the following terms.

(1) A D-C*-Bundle E = (p, E, X) is a group D and C*-Bundle E together with aD-action onE
and X such that the d-action for each dE D forms a C*-Bundle map (over the homeomorphic
d-action on X).
(2) For a D-C*-Bundle E = (p, E, X), a section s is D-equivariant (or just equivariant, if D is
understood) if d.s(z) = s(d.z) (Vz EX).
(3) Let r~(E) := {s E fo(E) 1: sis D-equivariant}.
Recall A, A, D, and G from section I above, and recall B(L2(D)) ~ Mn(C) (where n =Card(D)).
Let E be the trivial C*-Bundle over A:
E = (p, E, A), where E := Mn(C) X A
and p(N, a) := a for each element of E. Note that
r o(E) = {s: A-+ Mn(C) X A 1: sis continuous, vanishes at oo, p(s(a)) =a}
~ {s: A-+ Mn(C) 1: sis continuous, vanishes at oo}
So we can now identify elements of the cross-sectional C*-Algebra r o(E) with elements of the
C*-Algebra M0 (C0 (A)) . With a certain D-action on E , this identification will tie together
where E is a C*-bundle which will be defined below. The bijection r o(E) +-+ Co(A, Mn(C)} is
accomplished by projection onto the first factor. Given s E r o(E) define s' E Co( A, Mn(C)) by
s'(a) := proj1(s(a)). Conversely, givens' E C0 (A, Mn(C)), define s(a) := (s'(a), a). This bijection
is a C*-isomorphism.
FordED, define the d-action onE as follows. Let A E M0 (C), a E A, and so (A, a) E E. Then
d.( A, a):= (Ad, a, d.a)
where Ad,a E M0 (C) is defined by
(for each pair b, c E D)
which is easily seen to beaD-action on E by the D-action on A. For convenience, denote Ad,a by
d.A when a is understood.
50

CLAIM. The above D-action makes the C*-bundle E into a D-C*-bundle.
PROOF: Obviously the following commutes (set-wise) for each dE D:
d E -----+ E
A -----+ A d
It will first be shown that each fibre map d : Mn(C) --+ Mn(C) is an isometric isomorphism for a
fixed a. (Actually, d: Ea --+ Ed.a-) Since the action of don A E Mn(C) simply permutes entries of
A then twists each entry by an element ofT (each of whose elements have modulus 1) depending
only on d, a, and matrix position, then d does not change the norm of A (as an operator on C")
so the action is clearly an isometry, and also injective since only 0 permutes to 0 in Mn(C) , and
surjective since a basis is permuted to another basis of Mn(C) . So it is an isometric transformation
of Mn(C) (since n is finite).
Now that the action of d has been shown to be a fibre-wise C*-map, we must establish continuity
of d as a bundle map. Simply recall E = Mn(C) x A has the product topology and so the continuity
of the component functions of d : (A, a) 1-+ (d.A,d.a) establishes continuity of don the product
space.
Thus E is a D-C*-Bundle.
Construction of E. With D-C*-Bundle E above, a new bundle E is constructed such that fo(E) ~ r~(E), the
D-equivariant sections of E . r o(E) will then be shown C*-isomorphic to C*(G) . With this
in mind and following [3] ( ch. 2), a bundle F is first constructed as "the part of E seen by
equivariant sections".
For each a E A, let Da := {dE D 1: d.a = a} be the isotropy subgroup of D for a, sometimes
called the stability subgroup.
Define
Fa:= {bE Ea 1: b is fixed by Da}
={(A, a) 1: A E Mn(C) and d.A = A(Vd E Da)}
as those elements in a's fibre which are fixed by a's stability subgroup. Notice that for a fixed a E A
and any equivariant section s E r~(E) and d E Da, one has d.s(a) = s(d.a) = s(a), and so Do.
actually fixes each such fibre element s(a) E Ea for all equivariant sections s E r!'(E). Thus, Fa
contains the point-evaluation of r~ (E) at a.
51

CLAIM. Fa is a C*-subalgebra ofEa (for any fixed a E A).
PROOF: Simply check. To show it is a linear subspace, note 04 is fixed by Da so Oa E Fa. For a E C
and b, c E Fa and dE Da we have (since dis a C*-map on fibres of E ) d.(ab +c) = d.(ab) + d.c
= a( d.b) + d.c = ab + c since b and c are fixed by Da by definition. So d fixes linear combinations
from Fa. One shows in a similar fashion that Fa is a *-subalgebra. For multiplicative closure pick
b, c E Fa and dE Da. Then d.(bc) = (d.b)(d.c) =be. For involution note d.(b•) = (d.b)• = b•, again
because d is a C*-mapping.
It remains to show Fa is closed in Ea. If (bi) is a sequence of elements from Fa convergent to,
say, b E Ea and d E Da, then d.bi = bi -+ b and d.bi -+ d.b by continuity of d's action and so d.b = b
since E is a bundle, and, thus, bE Fa as required.
Define the set
CLAIM. D.F = F
F := U Fa. a eA.
PROOF: First, note the following relation for isotropy subgroups which is valid for any group action
H on a set X: for hE H, x EX
Hh.z = {k E H 1: k.(h.x) = h.x}
= {k E H 1: h- 1 .k.h.x = x}
= {hkh- 1 E H 1: k.x = x}
= hH z h - 1 (that is, just conjugate).
Now, for a fixed a E A and bE Fa and dEDit is sufficient to show Dd.a(d.b) = d.b. For any c E Dd.a
the above relation gives c = dgad- 1 for some ga E Da. Then c.(d.b) = (dgad- 1 )d.b = dga.b = d.b
since ga E Da and bE Fa. Thus d.b E F d. a· The reverse inclusion is trivial (using the trivial action
lv).
Give F the subspace topology from E and induced action of D. Then, restricting the projection
of E to 1r : F -+ A makes F = ( 1r, F, A) a bundle. Finally, define the "quotient bundle"
E := F/D
with the quotient topology; two points b, c E F are identified iff d.b = c for some d E D. 1r IS
D-equivariant (since each d-action is a bundle map on all E ) so there is an induced projection
1f: E-+ A/ D. Let
E := (i,E,A/D).
52
Elements of E will be denoted [b] (where b e F) and elements of A/ D will be denoted by [a]. Letting
~ A~ b fix d d · h 10 Quotient D F /D h b"" · b t a E e e an usmg t e set maps Fa ~ D.Fa ---+ . a , one as a IJectiOn e ween
E[a] and D.Fa/ D. The injective map f{)a : Fa !:! E[a] defined by the above bijections is also onto
and so we use tpa (for each a) to carry the C*-structures from F to the fibres of E. Operations in
these quotient fibres are the usual coset operations.
CLAIM. The C*-algebra operations on the fibres E[a] are well-defined.
PROOF: Fix [a] E A/ D. Addition will be shown. Scalar multiplication is similar. For two elements
[b], [c] E E[a] take any two representatives b, b' E [b] and c, c' E [c] such that 1r(b) = 1r( c) and
1r(b') = 1r(c') (so addition will make sense). We need to show b + c = d.(b' + c') for some dE D.
Without loss of generality one may assume 1r(b) = a. But b = d.b' for some dE D since they are
D-equivalent, and so c = d.c' since d carries fibres to fibres in F and c, c' are also equivalent by
assumption. Thus b + c = d.b' + d.c' = d.(b' + c') since dis a C*-map of Fa~ Fd.a·
The well-definedness of the norm for any [b] E E[a] is obvious since, by definition, ll[b]ll := llbll for
any bE [b], and any dE Dis an isometry of Fa and F d. a.
Involution and product in E[a] are similarly shown well-defined by using the C*-maps defined by
each dE D: if b' = d.b and if c' = d.c then d.(b*) = ( d.b )* = (b')* shows the involution defined by
[b]* := [b*] works and d.(bc) = ( d.b )( d.c) = b' c' shows the multiplication defined by [b][c] := [be] also
works.
THEOREM (FOLLOWING (3], 2.5). With the above notation, E := (7r, E, A/ D) is a C*-Bundle over
A/D. Further, the cross-section C*-algebra r o(E) on the quotient is isomorphic to the D-equivariant
sections ofE (that is, r o(E) ~ r!'(E)).
The proof of the above theorem is rather long. One first verifies that E is a C*-bundle. In order
to show this, two lemmas are required.
LEMMA 1. For a point a E A and a point b e Fa, define the equivariant function s' on the orbit
D.a of a : s'(d.a) := d.s'(a) and s'(a) =b. Then there is an equivariant section s on all E which
extends s'.
PROOF: Since the original E is a C*-bundle, 2.111 shows that E has enough sections. Let r be a
section which paSses through the given b: r(a) = b = s'(a). Let #Da be the size of the isotropy
subgroup Da. Since A is locally compact, one can use Urysohn's lemma to pick a continuous function
of compact support f: A~ [0, 1] such that f(a) = 1 and f(d.a) = 0 for all dE D \Da (a finite set).
53

Let fr denote pointwise product of these two functions. Define
s(x) := #~· 2: d.(fr)(d- 1 .x) a dED
for each x E A.. s(x) defines an element of E.t for each x . s is obviously bounded and contin
uous since r and f are, and the sum is finite. Further, let c E D and x E A. Then c.s( x) =
c.#k LdeD d.(fr)(d- 1 .x) = #1. LdeD cd.(fr)(d-1.x). Let d' = cd, then d = c- 1d' and d- 1 =
(d')- 1c. Substituting, c.s(x) = #baLdeD d.(/r)(d- 1 .c.z) = s(c.z) by definition. Therefore, s is
D-equivariant. Finally, /(d-1 .a) is one iff dE Da and it is zero iff dE D \ Da. Thus, s(a) simply
adds b up #Da-times, then divides out this same number, and so s(a) =bas required.
LEMMA 2. For a net ( ba) in F such that
(1) aa := 11"(ba) ___.a in A., and
(2) [ba]---+ [b] in F/D(= E) (sob E Fa wlog)
we have ba ---+ b in F .
PROOF: Define s'(a) := b, and for each d E D define s'(d.a) := d.s'(a). Note that this is well
defined since if d.a = c.a then c- 1d E Da and so c- 1d.s'(a) = s'(a) since s'(a) E F, and finally
d.s'(a) = c.s'(a). Use Lemma 1 above to get an equivariant sections onE which agrees with s' on
D.a. For each e > 0 define an open neighborhood Wf of b = s(a) = s(11"(b)) as follows:
Wf :={wE F 1: llw- s(11"(w))ll < E},
So the image Wf/ D in E is open. So, given e > 0, [ba] is eventually in every neighborhood of
(b), and especially in Wf/2/ D. But Wf/2 ~ F and if w E Wf/2 then equivariance of s and 11" gives
d.w- s(11"(d.w)) = d.w- s(d.11"(w)) = d.w- d.s(11"(w)) = d.(w- s(11"(w))). Since the action of dis
norm-preserving on F, we then have lld.w- s(11"(d.w))ll = lld.(w- s(11"(w)))ll = ll(w- s(11"(w)))ll <!
by definition of Wf/2 • Thus d.w E Wf/2 shows Wf/2 is a D-invariant set. So once any representative
ba of (ba] is in Wf, then all its representatives are in Wf. In particular for our given net, ba E Wf/2
for large enough a. Therefore llba - s(aa)ll = llba - s(11"(ba))ll < ! for large enough a. Also
s(aa)---+ s(a) =band so lls(aa)- s(a)ll <!for large enough a. Thus we finally have llba- bll =
llba- s(a)ll ~ llba- s(aa)ll + lls(aa)- s(a)ll < ! +! = f for sufficiently large a. That is, ba ---+b.
PROOF THAT E IS A C*-BUNDLE:
Continuity of norm' and operations must be verified as well as the "zero-limit" property.
( 1) llilli!l: The norm on F is continuous. The quotient map F -+ F / D ( = E) is open and the
norm on E is directly induced from the norm on F. Therefore any open set in R pulls back
54
to a set in F / D whose preimage in F (via the quotient map) is open. Thus the set is open in
F / D = E. Hence the norm is continuous on E. (2) scalar product: Let Ai -+A in C and [bi]-+ [b] in E both be nets over the same index set I.
Then Ai[bi]-+ A[b] needs to be shown for continuity. Again, note that scalar multiplication is
defined by A[b] := [Ab]. Now, since [bi] -+ [b], the projected net in A/ D, namely [iii] := 1f[bi] -+
i[b] =: [a], also converges in A/ D . Note that if N is a base of neighborhoods for a point z in
A , then N / D is a base for [z] in A/ D . Thus, [iii] -+ [a] implies that there is a convergent
net of representatives (iii) with each iii e [iii], and~ -+a (some a E [a]), since D is finite. So
[bi] -+ [b] and iii -+ a and lemma two then imply that bi -+ b in F. So, by continuity of scalar
multiplication in F, we have Aibi -+ Ab and so in Ewe have Ai[bi] = [Aibi]-+ [Ab] =: A[b].
{3) addition: Let [bi], [ci] be two nets over the same index set I such that [bi] and (ci] are over the
same base point[~] (so that addition makes sense). Suppose further that these nets converge
to [b], [c] respectively. Pick a convergent net (iii) of representatives for ([~]) as in proof of
scalar multiplication and a net of representatives (bi), (ci) for the nets [bi], [ci] respectively
with each bi, Ci over the point iii. Then lemma two gives bi -+ band Ci -+ c in F . Finally,
[bi] + [ci] := [bi + ci] -+ [b + c] =: (b] + (c] again by continuity of addition in F .
( 4) multiplication and involution are similar.
(5) Finally, the "zero-limit" property for a C*-bundle is verified. Let ([bi]) be a net in E such that
ll[bi]ll -+ 0 and [a;] := 1f([bi]) -+(a] e A/ D. It must be shown that [bi] -+ O(a]· Again, choose
a net (ai) in A with ai E [ai] such that ai-+ a, and a net (bi) in F such that bi E Fai. Then
llbill =: ll[biJII-+ 0 and so bi -+ Oa by the zero-limit property on F . Thus [bi] -+ [Oa] = O[a]·
PROOF THAT r!'(E) ~ ro(E):
Forse r~(E), define ~(s)[a] := [s(ii)] for [a] e A/D. Since sis equivariant, s(a) e F for each
a EA. So well-definedness of ~(s) is easily shown: if a= d.z for some de D, then s(a) = s(d.x) =
d.s(x) by equivariance, and so by definition [s(a)] = [s(x)]. Since the norm onE is induced from F
and the quotient map A -+ A/ D is continuous, then ~(s) is continuous and vanishes at infinity as
s does. In fact, lls(a)IIF = ll[s(a)]ll by definition, and so llslloo = ll[s]lloo: that is,~ is an isometry.
With pointwise operations on r~(E) and ro(E) (which makes them C*-algebras), ~is easily seen to
be linear. Therefore, r~ (E) is isometrically isomorphic to its image in r o(E). We want the image
to be all r o(E).
To finish the proof we will use the "Bundle Stone-Weirstrass" theorem. Since r~ (E) and its ~
image are full algebras of operator fields on A/ D ([4], p.233), we will be done if we show the image
55
separates r o(E) in the following sense: if [a], [x] e A/ D and if [b] e E[a] and [c] e E[~], then there is
an image point c)( s) that passes through both [b] and [c). For this, lemma 1 can be extended to take
any finite D-invariant subset of A and yield a invariant section passing through each representative
of [b] and [c). Thus c) is onto, and so r~(E) ~ r o(E).
11.2 C*(G) ~ ro(E).
Recall, from section I above, the injective homomorphism fJ: D--+- AUT(Mn(Co(A))) with respect
to which C*(G) ~ M0 (Co(A))D. We also have r~(E) ~ r o(E) by section II. Thus, it is sufficient to
show r~(E) is isomorphic to Mn(Co(A))D. This last isomorphism is accomplished in the following
two claims.
Since E (constructed in section II) is the trivial bundle over A , there is a natural identification
of Mn(Co(A)) and r o(E) given by
for each F E M0 (C0 (A)), where (F,id..4)(a) .- (F(a),a). This is a C*-identification since the
bijection c)o is obviously an isometry.
Define aD-action on r o(E) pointwise, using the D-action forE: fordED and s E r o(E), then,
for all a E A, define (d.s)(a) :=d. s(a). Using the above identification c) 0 , lets= (S, id_..d for some
S e Mn(Co(A)). The D-action on fo(E) then becomes (d.s)(a) = d.(S,id.A)(a) = d.(S(a),a) =
(S(a)d,a,d.a). From the definition of D acting onE, one has, for b,c e D, (S(a)d,a)b,c
:= a(a(b,d)- 1a(c,d))(S(a))bd,cd· But notice that (f3(d)S)b,c(d.a) = a(a(b,d)- 1a(c,d))(S(a))bd,cd,
and so, solving, one has a(a(b,d)a(c,d)- 1)f3(d)Sb,c(d.a) = (S(a))bd,cd· Substituting and simplifying,
one has the expression (S(a)d,ah,c = (f3(d)S)b,c(d.a).
CLAIM. <~>o takes fixed-point elements (M 0 (C 0 (A))D) to equivariant elements (T~(E)).
A D PROOF: If S E Mn(Co(A)) , then, by section I, one has f3(d)S = S for any dE D. So, by the above
expression, (S(a)d,ah,c = (f3(d)S)b,c(d.a) = (S)b,c(d.a) = (S(d.a))b,c for each pair b,c ED. That is,
d.(S, id_..t)(a) = (S(a)d,a, d.a) = (S(d.a), d.a) = (S, id..4)(d.a), and so (S, id..4) = <~>o(S) is equivariant.
CLAIM. The restriction of<l> 0 to M0 (C 0 (A))D maps onto r!'(E).
PROOF: Let s E f~(E). So s(d.a) = d.s(a) for all d E D and a E A. When unrestricted, <1>0
is surjective onto r o(E), so let S e Mn(Co(A)) be such that s = c)0 (S) = (S, id.A)· It will be
shown that Sis actually a fixed-point element. Fix de D. Since sis equivariant, (S(d.a),d.a) =
(S,id.A)(d.a) = d.(S(a),a) := (S(a)d,a,d.a). Thus, S(d.a) = S(a)d,a. So, using the definition of
S(a)d,a, one has, for each b,c ED, (S(d.a))b,c = (S(a)d,ah,c = a(a(b,d)- 1a(c,d))(S(a))bd,cd· But
56

then, substituting the expression derived above the previous claim for ( S( a) )bd,cd and simplifying,
one has (S)b,c(d.a) = (S(d.a))b,c = (j3(d)S)b,c(d.a) for each b, c e D, and so S(d.a) = (j3(d)S)(d.a) is
valid for any dE D and any a e A.. Using d- 1 .a in this expression, one has S(a) = S(d.(d- 1 .a)) = (j3(d)S)(d.(d- 1.a)) = (j3(d)S)(a) for any de D and a eA.. Thus, Sis a fixed-point element, as
required.
We now have all the machinery necessary to calculate C* (G) and the irreducible representations A A D •
of C*(G) . For each a E A, .Aa := {F(a) 1: F E M0 (C0 (A)) (:!! C*(G))} IS a C*-subalgebra of
M0 (C) which corresponds to the fibre Fa,. The next chapter uses r 0 (E) (:!! C*(G)), the section
C*-Algebra of E , to find all representations of r 0 (E) by finding those of each fibre and extending.
57

Chapter 6 The C*-Algebras of the Planar Crystal Groups
and Their Irreducible *-Representations
This chapter applies the theory developed in chapter five to the planar crystal groups listed in
chapter four. For a two-dimensional crystal group G, c• (G) is constructed and then an alternative
description is determined. The irreducible representations of c• (G) are then determined and
described. The full listing for all seventeen crystal groups can be found in appendix A. Throughout
this chapter, let G be a fixed two-dimensional crystal group, A ~ G the lattice subgroup, and
D = G/A the point group of G. Recall from 4.1 that these three groups form the exact sequence
In this case A~ Z2 • Let n be the (finite) size of the point group D.
The first step which must be carried out before applying the formula for c• (G) is to find an
explicit identification between the two formats used to describe G. On the one hand, 5.1 views G
as {(d, (~)) 1: dE D, i,j E Z} with a certain product. On the other hand, 4.11 uses a (fixed)
cross-section '"( for D to express G as {(Md, ud)(l, G)) 1: d E D, (Md, ud) = '"f(d), i,j E Z} by
A-coset decomposition. Using the particular cross-section ; from 4.1I.2 (for each group), we will
map each element ;(d)= (Md,ud) to (d,O,O) to define a (fixed) cross-section of Din the format of
chapter five. Then the map (Md, v) 1-+ (d, M;J 1(v- ud)) is the desired isomorphism and has inverse
(d, G)) I-+ (Md,Ud Md G)). ! Description of A.
In order to apply the formula from chapter five which describes c• (G) one needs the dual space
A of the lattice A. A~ V turns out to be T 2 in the planar case. For let (z, w) be an element of
T 2 (so z, w are elements of C with unit modulus). Define X(z,w) by
(i) .. X(z,w) j := z'w (V G) e Z2
).
Then X(z,w) is a homomorphism of Z2 ~ T, and since Z2 is discrete, X(z,w) is continuous. Hence
- - (z) X(z,w) E Z2 • Conversely, if IE Z2 then I acts on each component of Z2 homomorphically: I 0 =
I (~)'and I G) =ICY (for any i, j E Z). Let z =I ( ~) and w =I ( ~). Then I= X(z,w)·
Therefore A ~ Z2 ~ T 2 as claimed.
58

II D-action on A and A.
The action of the point group D on the lattice A ( = Z2) and its dual A ( = V = T 2) can be
explicitly calculated as follows. Note that the cross-section "Y and the lattice A are preserved by
our identification of G (with ''itself" via the above isomorphism) and so the D-action on A may
be calculated directly by using the description of G found in 4.11.2. Now, for a fixed d E D,
recall the orthogonal transformations identified with d and d- 1 , namely Md, Md-l E 9(R2 ). Let
Md = [au a12 ] and let Md-l = [6611
6612 ]. Recall that the D-action on A is defined ford E D
a21 a22 21 22
and a E A by d.a := "'f(d)a"Y(d)- 1 . In the notation of chapter four this evaluates to the action of Md
on Z2: d.( 1' G ) ) = ( 1, M d G ) ) (identifying A with Z2). Therefore, the action has the explicit
formulation
In the dual A, the D-action is defined for d E D and x E A by the action on A: ( d.x)( a) .
x(d-1.a) (Va E A). Now, given dE D and (z, w) E T 2 , we have, for each G) E Z2 ,
d.X(•,w) G) := X(•,w) ( d-'. G)) = X(•,w) ( Md-•· G))
= (zbuwb:~1)i (zbt:~wb22 )i
= X(•'""''"·''""'"'') (;)
which gives a formula for the action of don A . Note that an element X(z,w) of A may be written
simply as (z, w) without any ambiguity, and this naming convention will be followed henceforth.
Appendix A lists the D-action on A for each planar crystal group.
The 2-cocycle.
The remaining piece of information required to apply the formula for C* (G) is the 2-cocycle
a : D x D ~ A. This is found by using the cross-section "Y and the definition of a: a(b, c) = "Y(bc)- 1"Y(b)"Y(c) for each pair b, c E D. Since the cross-section is preserved by our identification
and A is preserved, we may use chapter four's description of G to calculate the 2-cocycle a directly.
Appendix A lists the 2-cocycle for each planar crystal group.
Description of C*( G).
By 5.1, one has the following formula for C*(G) . For each dE D let Fd(z, w) = Fd,1D(z, w) be
59
an arbitrary continuous function over T 2 • Then the matrix whose entries are defined by
is an element of C* (G) . Further, every element of C* (G) is obtained in this way for some set of
n functions, Fd(z, w) E C(T2) (for each dE D). A general element of C*(G) is listed in Appendix
A for each planar crystal group.
III Determination and Description of A/ D.
In order to construct the tilde bundle E (5.11), one needs the base space. In the planar crystal
group case, the base is the quotient space A/ D = T 2 /D. It has been shown that the group C*
Algebra C*(G) is isomorphic to the section C*-algebra fo(E) . Again, this section C*-algebra
is desired because the irreducible representations on it are accessible, and these representations
determine those of C* (G) . Further, one can give an alternate description for C* (G) using the
quotient space.
Recall that the action of each dE D is a homeomorphism of T 2 • The quotient space identifies
each D-orbit by definition. Thus, an appropriate way to find the quotient space is to determine a
particularly nice ''fundamental domain" of the orbit space and then determine how its boundary
points are identified by the D-action. A fundamental domain is an (open) subset I< s; T 2 satisfying
c.I< n d.I< = 0 whenever c, d E D are distinct elements, and UdeDd.I< = T 2. That is, a fundamental
domain is a subset of T 2 whose D-translates are disjoint and whose closure translates over all T 2 •
In the case of two-dimensional crystal groups it often happens that the stability sets Sd := {(z, w) E
T 2 1: d.(z, w) = (z, w)} (for each d E D) delineate an obvious choice for a fundamental domain.
Note that each point of such a fundamental domain must have a trivial isotropy subgroup. The
frontier of a fundamental domain I< will always map to the frontier of any D-translate of I<, and
all these boundaries are disjoint from any translate of I<. Thus the quotient space is determined by
finding the identification produced by translating the boundary of I<. In the planar crystal group
case, some of the D-actions on A/ D are identical for distinct groups and so these quotient spaces
will be listed together in Appendix A.
For some purposes, such as proving a set is a fundamental domain, it is easier to work in R 2 /(2Z)2
rather than in the (homeomorphic) space T 2 • R 2 /(2Z)2 is represented diagramatically by [-1, 1] x
[-1, 1] with opposite edges identified, as usual. An element(} E [-1, 1] maps to the element z = e1riB
ofT C C. So (z, w) E T 2 and (0,() E [-1, 1] x [-1, 1] can be identified (with due regard for the
edge identification in [-1, 1] x [-1, 1]). Direct calculation shows the action of D on T 2 induces a
60
"linear" action on [-1, 1] x [-1, 1]:
d.(8,() = (8,()Md-l,
where the right-hand side of the equation is right matrix multiplication with a row vector (and then,
of course, factoring out by (2Z)2•
IV Alternate Description of C* (G).
The identification of C* (G) with r o(E) leads to an alternate description of C* (G) . Recall
the isomorphism Fi' ~ E[!) from 5.11 for any [x] e A/ D and then any X e [x]. If X has trivial
isotropy subgroup D1-, then F1- ~ M0 (C) by the definition of the bundle F . Thus the fibres of
E are trivially M0 (C) over each such quotient point [x]. This is the case, for example, if x is an
element of a fundamental domain for T 2 . In general, Eisa C*-bundle so it has enough sections in
ro(E) and so, recalling the map 4> from chapter five, we have F! ~ E[x] = {4>(s)([x]) 1: s E r!'(E)}
~ {s(x) 1: s E r!'(E)} ~ {F(x) 1: FE M0 (Co(A))}D which is just point evaluation of the equivariant
function matrices describing C* (G) . Let L be a cross-section of the D-action on T 2 that is contained
in the closure of a (given) fundamental domain]{. Then the only points in L which have non-trivial
isotropy subgroup are contained in the frontier of K (in L). By appropriate identification, C*(G) is
isomorphic to a subalgebra B C M0 (C(L)) where FEB iff F(x) E Fx for every x E L, and F(x)
satisfies the following limit condition as x approaches a point of K \ L: for a E J{ \ L, there exist
b E K u L and dE D such that d.b = a. As x approaches a from within L,
lim1--aF(x) = d.F(b),
where one recalls the notation for the D-action on such a matrix from 5.11. This provides the most
easily visualized description of C"'(G) . For (z0 , w0 ) E T 2 , let A(zo,wo) denote the algebra, obtained
by point evaluation, {.E(z0 , w0 ) 1: .E E M0 (Co(A))D}. Appendix A lists each such boundary point
(zo, wo) which has non-trivial isotropy subgroup in a given cross-section for the D-action, and also
lists the associated finite dimensional C*-subalgebra A(zo,wo) C M0 (C).
V Irreducible Representations of C*(G).
From 5.111, C*(G) ~ r o(E). Further, from 3.111, one has that the irreducible representations
of r o(E) are in one-to-one correspondence with the set of irreducible representations over all the
C*-fibres E{a)· As noted above in the alternative description for C*(G) , each fibre of E can be
explicitly written down as a C*-subalbgebra of M0 (C) , namely Aa. Also, for a= (zo, wo) E T 2,
A(zo,wo) is all Mn(C) if and only if D(zo,wo) = {lD }. The only irreducible representation (up to
61

equivalence) of Mn (C) is the trivial one, so the representation over any point with trivial isotropy
subgroup lifts to the following representation of C* (G) :
viewing C*(G) as M0 (C0 (.A))D. If A(zo,wo) is not M0 (C) , then, from 3.1, the following procedure
is sufficient to determine (a representative of) each of the irreducible representations of A(zo,wo) .
There are only finitely many irreducible representations since A(zo,wo) is finite dimensional, so call
them 7r(1zo,wo)' ••• ,7rk(•o.•o> Each of these lifts to an irreducible represent.ation on all C*(G): (zo,Wo) •
That is, apply the irreducible representation to F evaluated at (z0 , w0 ).
METHOD FOR FINDING THE IRREDUCIBLE REPRESENTATIONS OF A ) Given a C* subalgebra (z 0 ,Wo · -
(1) Determine the form of the commutant A(zo,wo) of A(z0 ,w0 ) •
(2)
(3)
(4)
Determine the form of projections in A'( ) . Zo,Wo
Determine the form of minimal projections in A(zo,wo) .
Find a set P1, ... , PR in A(zo,wo) of orthogonal minimal projections that sum to the identity
I.
(5) Find a change of basis U (Unitary) that Block-diagonalizes A(zo,wo) with respect to the set
from (4). Each block is a simple C*-algebra.
(6) Pick a maximal subset Pip ... , Pis of inequivalent projections from ( 4).
Then the representations defined, for each A E A(zo,wo)' by 1rj (A) = Alp,; for 1 ~ j ~ S are
inequivalent, irreducible and all there is for A(zo,wo) . They have a particularly nice form:
Finally, one gets a mutually inequivalent list of all the irreducible *-representations of C*(G) as
where L is any cross-section of the D-orbits in T 2 •
62
REFERENCES
(1] W. Arveson, An Invitation to C*-algebras, Springer-Verlag, N.Y., 1976.
[2] M. J. Dupre and R. M. Gillette, Banach Bundles, Banach Modules and automorphisms of C*
algebras, Pitman Publishing Inc., Mass., 1983.
[3] B. D. Evans, C*-bundles and compact transformation groups, Mem. Amer. Math. Soc., vol 39,
no 269 (1982).
(4) J. M.G. Fell, The Structure of Algebras of Operator Fields, Acta. Math. 106 (1961) 233-280.
(5) J. M. G. Fell and R. S. Doran, Representations of *-Algebras, Locally Compact Groups, and
Banach *-Algebraic Bundles, vol. I, Academic Press, San Diego, 1988.
(6] F. P. Greenleaf, Invariant Means on Topological Groups, American Book Company, 1969.
(7] I. Hargittai and M. Hargittai, Symmetry Through the Eyes of a Chemist, VCH Publishers, New
York, 1986.
[8] H. Hiller, Crystallography and Cohomology of Groups, ______ , Dec. 1986.
[9) R. V. Kadison and J. R. Ringrose, Fundamentals of the Theory of Operator Algebras, vol.I,
Academic Press, N.Y., 1983.
[10] B. O'Neil, Elementary Differential Geometry, Academic Press, N.Y., 1966.
[11] W. Rudin, Real and Complex Analysis, McGraw-Hill, N.Y., 1974.
[12] W. Rudin, Fourier Analysis on Groups, Interscience Publishers, N.Y., 1960.
[13] R. L. E. Schwarzenberger, The 17 plane symmetry groups, Math. Gaz., 58 (1974) 123-131.
[14] K. F. Taylor, C*-Algebras of Crystal Groups, Operator Theory: Advances and Applications, 41
(1989), Birkhauser Verlag Basel, 511-518.
[15) D. R. Farkas, Crystallographic Groups and their Mathematics, R. Mtn. J. Math., 11 (1981),
511-551.
63
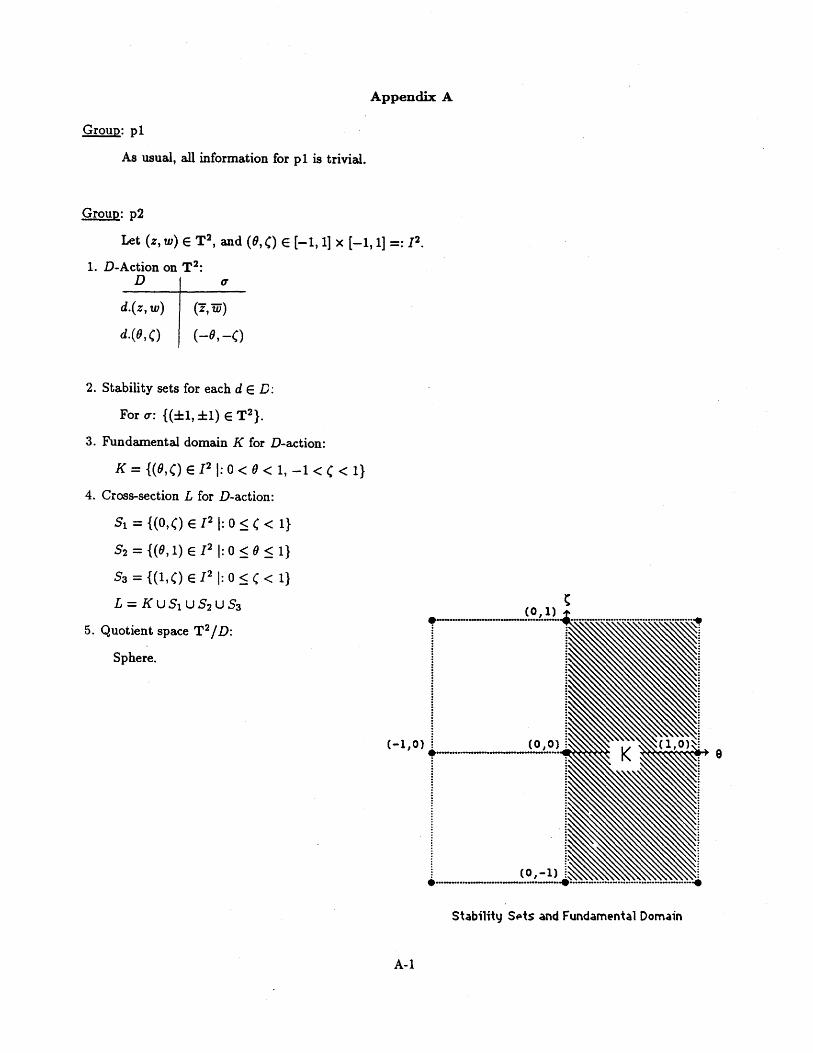
Appendix A
Group: p1
As usual, all information for p 1 is trivial.
Group: p2
Let (z, w) E T 2, and (8, () E (-1, 1] x (-1, 1] =: 12•
1. D-Action on T 2 :
D tr
d.(z, w)
d.(8, ()
(z,w)
(-8,-()
2. Stability sets for each dE D:
For tr: {(±1, ±1) E T 2 }.
3. Fundamental domain K forD-action:
K = {(8,() E 12 1: 0 < 8 < 1, -1 < ( < 1}
4. Cross-section L for D-action:
s1 = {(O,() e 12 I= o ~ c < 1}
52 = { ( 8' 1) E 12 I: 0 ~ 8 ~ 1}
Sa= {(1,() E 12 1: 0 ~ ( < 1}
L = K u S1 u S2 u Sa
5. Quotient space T 2 / D:
Sphere.
Stability SPts and Fundamental Domain
A-1
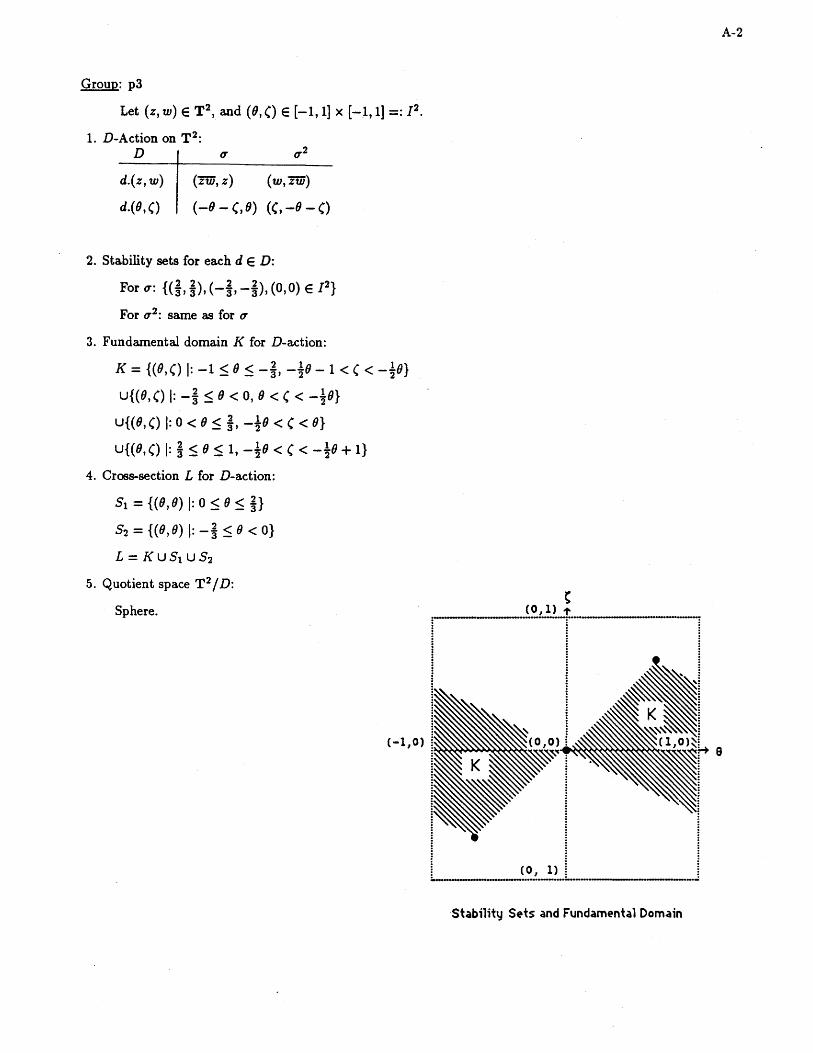
Group: p3
Let (z,w) E T 2 , and (0,() E [-1,1] x (-1,1] =: 12 •
1. D-Action on T 2 :
D u u2
(zw,z) (w,zw) d.(z, w)
d.(O, () (-0- (,0) ((, -0- ()
2. Stability sets for each d E D:
For u: {(j,j),(-j,-j),(O,O) E 12}
For u 2 : same as for u
3. Fundamental domain K forD-action:
K = {(0,() 1: -1 =50 =5 -j, -!O- 1 < ( < -!O}
u{(O,() I= -j =5o< o, o < (<-to}
u{(O, () 1: 0 < 0 =5 j, -!O < ( < 9}
U{(O,() 1: j $0$1, -!O < ( < -!0+ 1}
4. Cross-section L for D-action:
St = {(0,0) 1: 0 =59 =5 j}
52= {(9,9) 1: -i =59< 0}
L = KUSt US2
5. Quotient space T 2 / D:
Sphere.
A-2
t (0,1) 1" -
(0 I 1) :....--------··········-·--··-·····-------
Stability Sets and Fundamental Domain
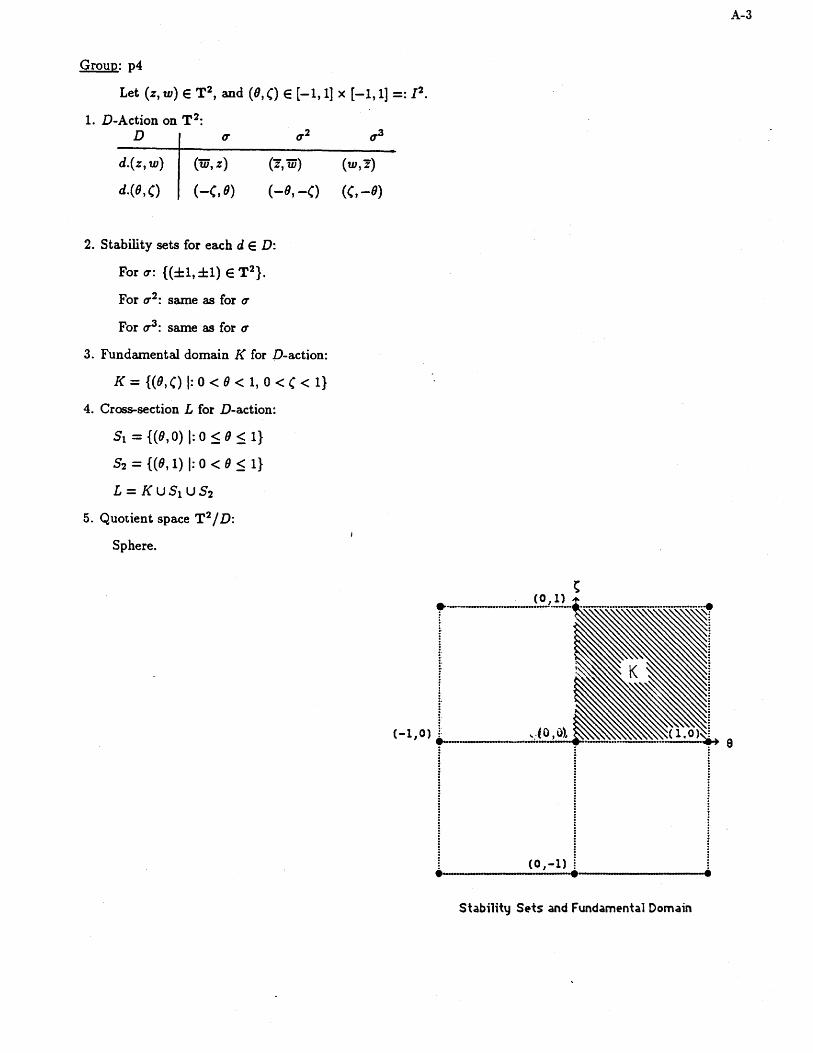
Group: p4
Let (z, w) E T2 1. . • and (9,() E [-D-Ac~on on T2: 1, 1) x [-1, 1) =: P.
2. Stabilit y sets for each d eD· Foro-· {( · . ±1, ±1) E T2}
For o-2. 8 • . arne as for o-
For o-3. 8 . arne as for o-
3. Fundamental d . omain K r: 10r D t" K = {(9 -ac Jon:
'() 1: 0 < 0 < 1 4. Cross-sect" ' 0 < ( < 1}
Ion L forD . -action·
St- {(0 . - , O) 1: 0 5: 0 < 1}
52- {(0 -- , 1) 1:0 < 0 < L- _1}
- K USt US2
5 Qu . . otlent space T2 / D:
Sphere.
·--·--·--··· ( 0 1 ~
(-l,O)t----4~· (0,-ll 1 i __. ~
Stabilitu s ... t " "' sand F undamenta 1 D . om am
A-3
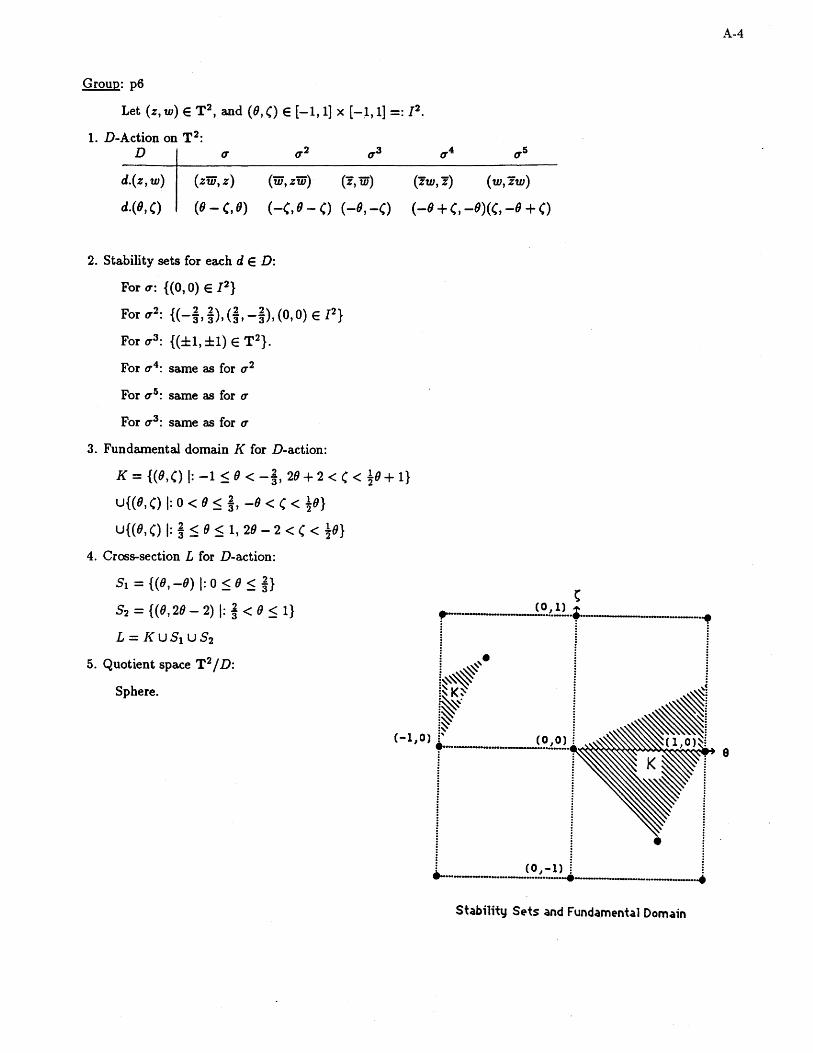
Group: p6
Let (z, w) E T 2 , and (0, () E [-1, 1] x (-1, 1] =: 12•
1. D-Action on T 2 :
D tr
d.(z,w)
d.(O, ()
(zw,z)
(0- (,0)
(w,zw) (z, w)
( -(' 0 - () ( -0' -()
2. Stability sets for each d E D:
For tr: {(0, 0) E 12}
For o-2: {( -~, ~), (~, -~), (0, 0) E 12 }
For o-3 : {(±1, ±1) E T 2}.
For tr5 : same as for tr
For o-3 : same as for fT
3. Fundamental domain K forD-action:
K = {(0,() 1:-1 ~ 0 < -i, 20 + 2 < ( < !O+ 1}
u{(O, () 1: 0 < 0 ~ i, -0 < ( < !O}
u{(O, () 1: i ~ 0 ~ 1, 20-2 < ( < !O}
4. Cross-section L for D-action:
s1 ={(O,-O) l=o~o~ il s2 = {(o, 20- 2) I= i < o ~ 1}
L = KuS1 us2
5. Quotient space T 2 / D:
Sphere.
(zw, z) (w,zw)
(-0 + (, -0)((, -0 + ()
• ~ (0 -1) ~ ·-···-···---·-·······!.··-··· .. -··----·-·--··-..
Stability Sets and Fundamental Domain
A-4
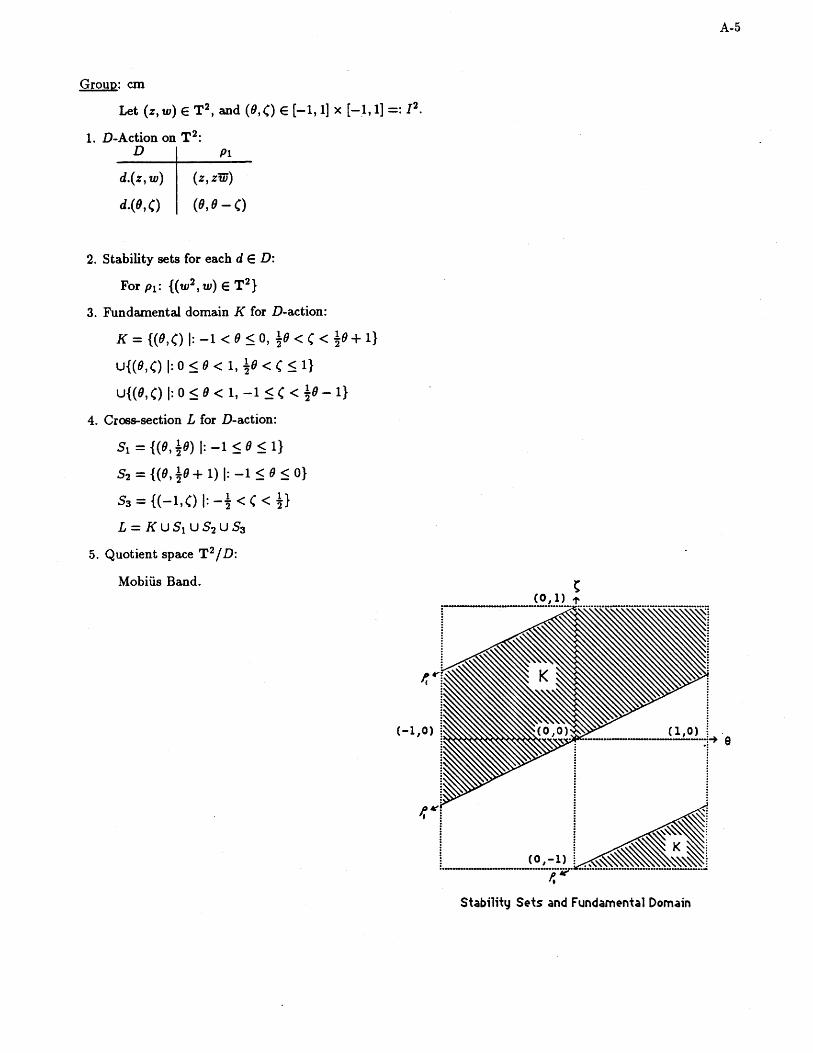
Group: em
Let (z, w) E T 2 , and (8, () E (-1, 1] x [-1, 1] =: ! 2•
1. D-Action on T 2:
D Pl
d.(z, w)
d.(O,()
(z,zw)
(8,8- ()
2. Stability sets for each dE D:
For P1: {(w2 ,w) E T 2 }
3. Fundamental domain K forD-action:
K = {(8,() 1: -1 < 8 50, -!8 < ( < -!8 + 1}
u{(8,() 1:0 58< 1, -!8 < (51}
u{(8,() 1:0 58< 1, -1 5 ( < -!8- 1}
4. Cross-section L for D-action:
5t = {(8, -!8) 1: -1 58 51}
52 = {(8, -!8 + 1) 1: -1 5 8 5 0}
53= {(-1,() 1: --! <' < il L = K u 5t U 52 U 53
5. Quotient space T 2 f D:
Mobiiis Band.
~II:' '• ~l : ~1; ~ (0,-1) I .. ,,~4,.~~: ·-·-·---··-··--·······~.·"it'· ·············-··········-···-·-··-····-
• Stabilit'1 Sets and Fundamental Domain
A-5
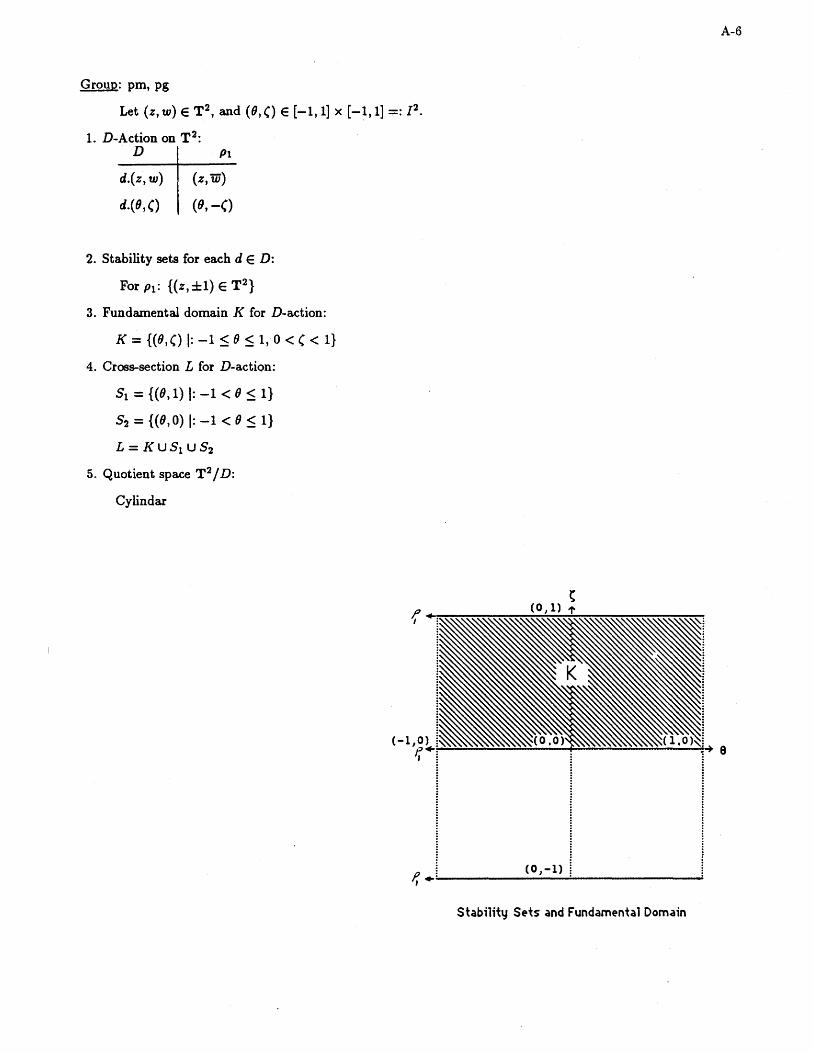
Group: pm, pg
Let (z,w) e T 2, and (8,() e [-1,1] X [-1,1] =: 12•
1. D-Action on T 2 :
D Pt
d.(z, w)
d.(8, ()
(z,w)
(8, -()
2. Stability sets for each d E D:
For Pt: {(z, ±1) E T 2 }
3. Fundamental domain K forD-action:
K = {(8,() 1: -1 $. 8 $. 1, 0 < ( < 1}
4. Cross-section L for D-action:
St = {(8, 1) 1: -1 < 8 $. 1}
s2 = {( 8, o) 1: -1 < 8 $. 1}
L = KUSt US2
5. Quotient space T 2 / D:
Cylindar
(0 ~-1) ! ;: ·-------------------__,_: Stability Sets and Fundamental Domain
A-6
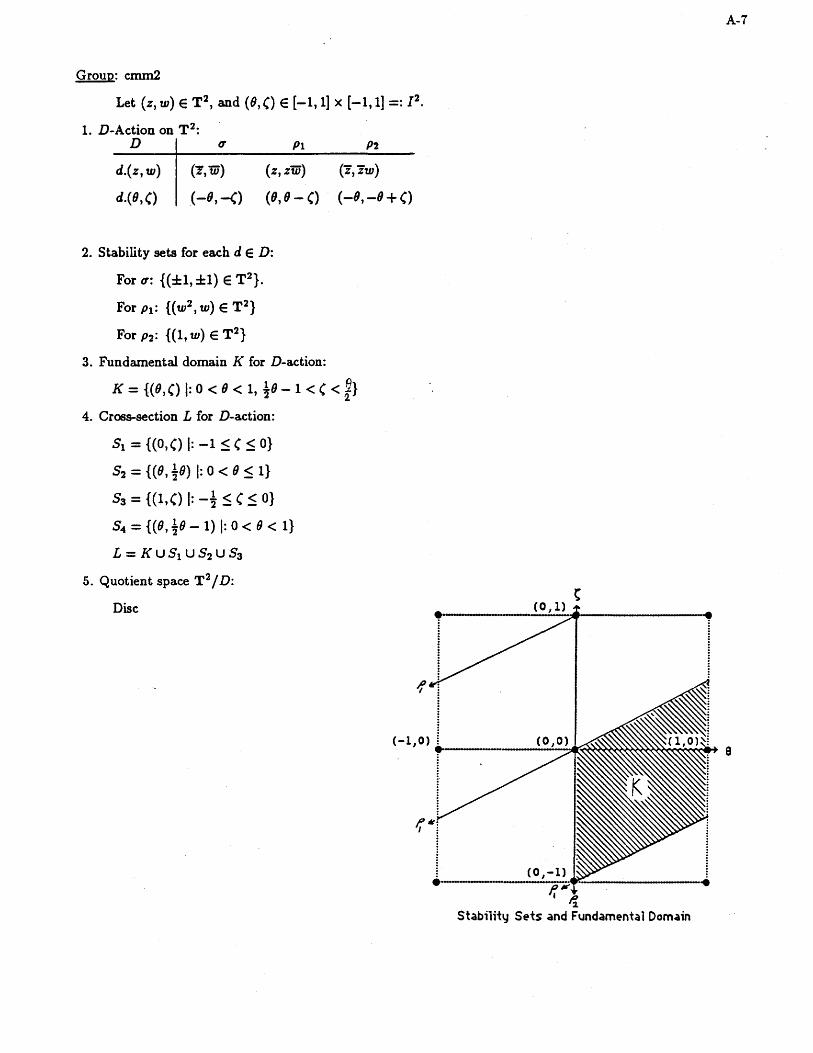
Group: cmm2
Let (z, w) E T 2 , and (8, () E (-1, 1) x (-1, 1) =: 12 •
1. D-Action on T 2: D tr Pl P2
(z, w) (z, zw) (z, zw) d.(z, w)
d.(8,() (-8, -() (8, 8- () (-8, -8 + ()
2. Stability sets for each d E D:
For u: {(±1, :t:l) E T 2}.
For P1: {(w2 , w) E T 2}
For P2: {(1, w) E T 2}
3. Fundamental domain K forD-action:
K = {(8,() 1:0 < 8 < 1, !8- 1 < ( < ~}
4. Cross-section L for D-action:
51= {(O,() I= -1 ~ ( ~ o}
52 = {( 8, !O) 1: 0 < 8 ~ 1}
53 = {(1,() 1: -! ~' ~ 0}
54 = {(8, !8- 1) 1: 0 < 8 < 1}
L = K u S1 u 52 u 53
5. Quotient space T 2 / D:
Disc
1
(-1,0) l
i fkl • P.~~-~------------·
I -1 Stability s~ts and Fundamental Domain
A-7
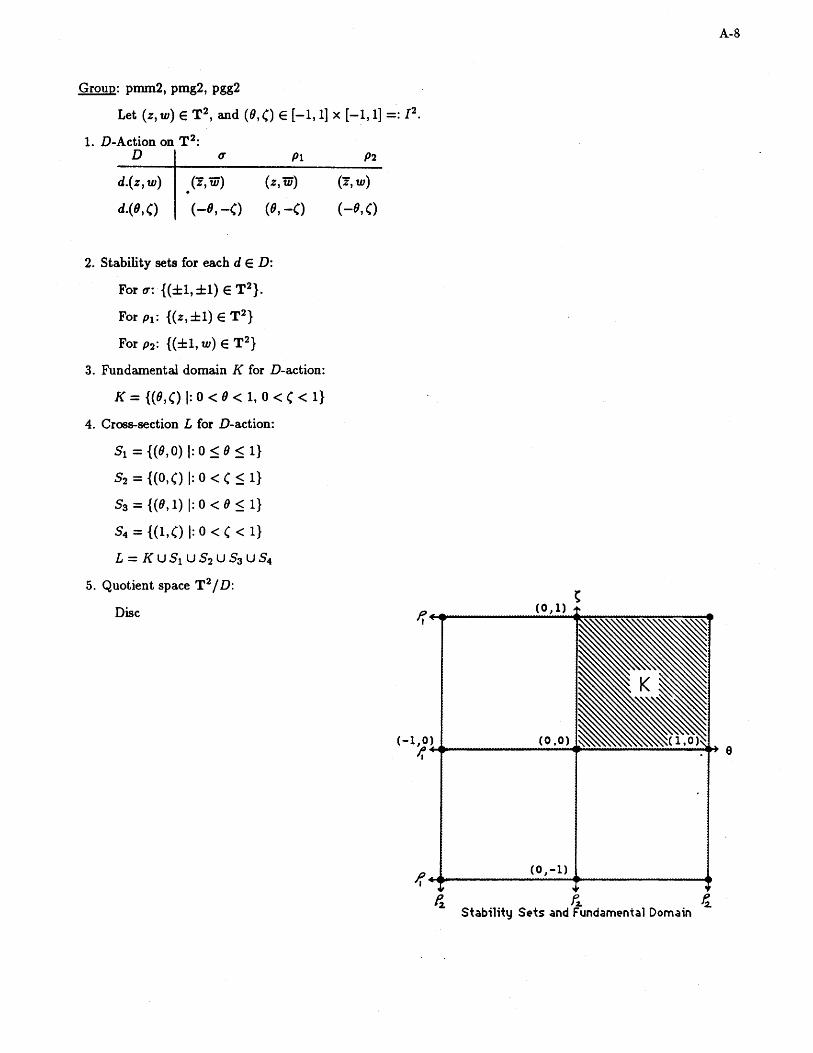
Group: pmm2 'pmg2, pgg2
. , and ( 9, () E [- . Let (z, w) E T2 1. D-Act•on on T•· 1, 1] x [-1, 1] =: [2 D . . .
2. Stabilit y sets for each d eD·
ForO"" {(± · . 1,±1) E T2}
For p . {( · 1· z, ±1) E T2}
For P2: {(±1, w) E T2}
oma1n K £ 3. Fundamental d . K or D-actio .
= {(8,() 1: 0 < 8 n.
. Cross-se t" ' < 1} 4 < 1, 0 < ~
cIon L forD . -action·
s, = {( 8, o) I: o ::; 8 < 1} .
82 = {(0 I' -,,)1:0<(<1}
Sa- {(9 -- ,1)1:0<9~1}
84 = {(1,() 1: 0 < ( < 1}
L=KUS 1 u 82 us us 5 Q .
3
4 . uotient space T2 / D:
Disc
A-8
Stability Set ~ sand Fundamental D . ~ om am
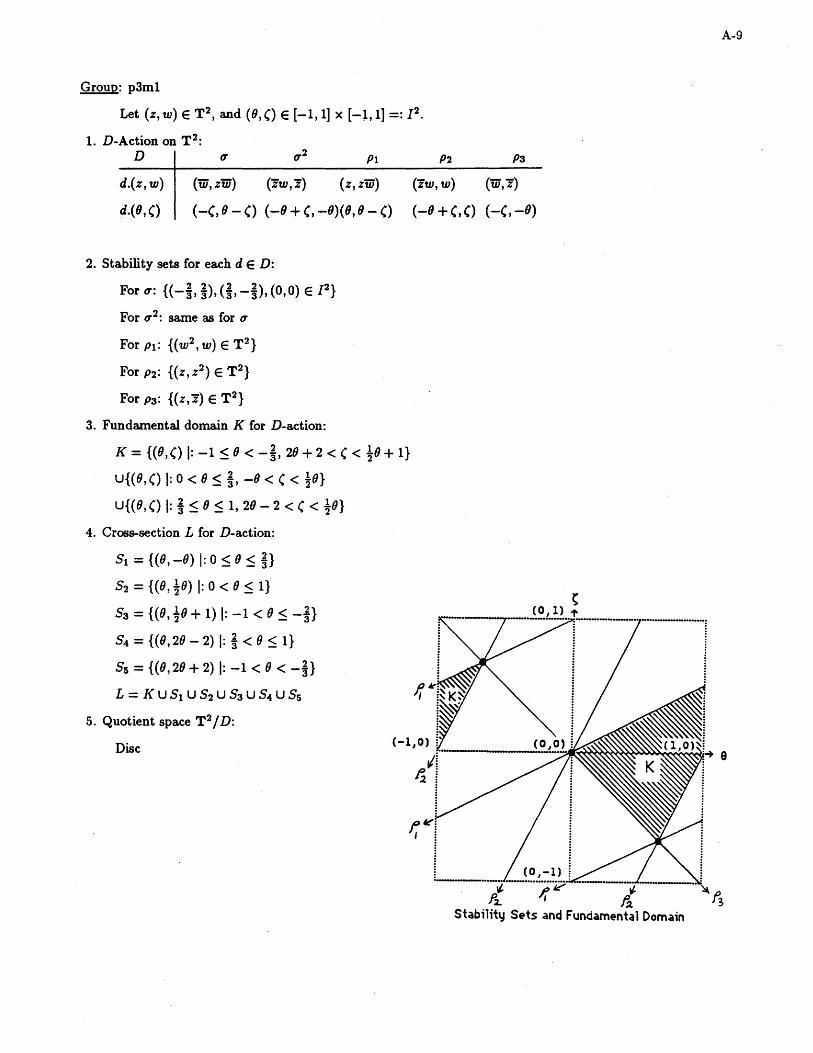
A-9
Group: p3ml
Let (z,w) E T 2 , and (8,() E (-1,1] x (-~,1] =: 12 •
1. D-Action on T 2:
D tr Pl
(w,zw) (zw,z) (z,zw) d.(z,w)
d.(8,() (-(, 8- () (-8 + (, -8)(8, 8- ()
2. Stability sets for each d E D:
For tr: {( -j, j), (j, -j), (0,0) E 12 }
For tr2: same as for tT
For P1: {(w2 , w) E T 2 }
For P2: {(z, z2) E T 2}
For p3: {(z,z) E T 2}
3. Fundamental domain K forD-action:
K = {( 8, () 1: -1 ~ 8 < - j, 28 + 2 < ( < !8 + 1}
U{(8, () 1: 0 < 8 ~ ft, -8 < ( < !8}
U{(8,() 1: ft ~ 8 ~ 1, 28-2 < ( < !8}
4. Cross-section L for D-action:
s1 = {( o, -8) 1: o ~ o ~ i} s2 = {(o, !B) I= o < o ~ 1}
83 = {(8, !B + 1) 1: -1 < 8 ~ -j}
84 = {( 8, 28 - 2) 1: i < 8 ~ 1}
8s = {(8,28+ 2) 1:-1 < 8 < -j}
L = K u S1 u 82 u S3 u 84 u Ss
5. Quotient space T 2 / D:
Disc
P2
(zw,w) (w,z)
(-8 +(,() (-(,-8)
.. li f;
Stability Sets and Fundamental Domain
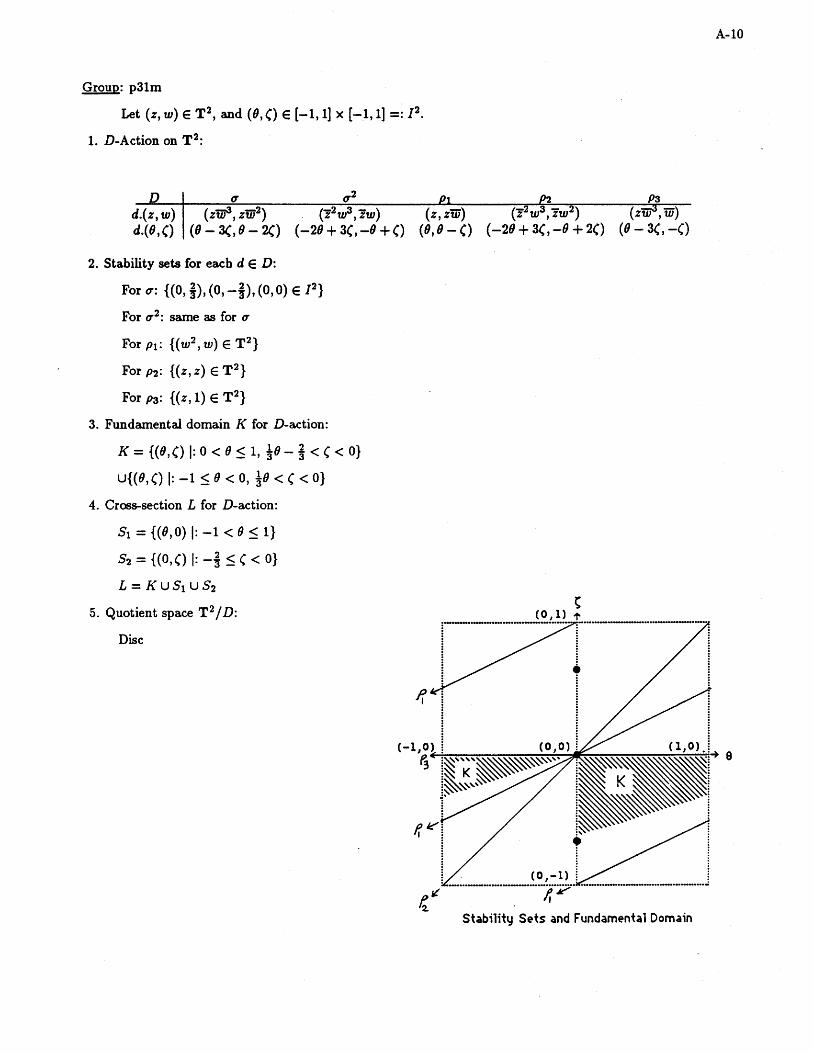
Group: p31m
Let (z,w) E T 2 , and (6,() E [-1,1] x [-1,1] =: 12 •
1. D-Action on T 2 :
d.( z, w) ( ziifi, zw2) (z2 w3, zw) ( z, zw) (z2 w3, zw )
d.(6, () (6- 3(, 6- 2() ( -26 + 3(, -6 + () (6, 6- () ( -26 + 3(, -6 + 2()
2. Stability sets for each d E D:
For tr: {(0, j), (0, -j), (0, 0) E 12 }
For o-2 : same as for tr
For Pt= {(w2 , w) E T 2}
For P2: {(z, z) E T 2}
For p3: {(z, 1) E T 2}
3. Fundamental domain K forD-action:
K = {(0,() 1: 0 < 6 ~ 1, !O- j < ( < 0}
u{(6,() 1: -1 ~ 6 < 0, !O < ( < 0}
4. Cross-section L for D-action:
St = {(6,0) 1:-1 < 6 ~ 1}
52 = {(0, () 1: -j ~ ' < 0}
L = KUSt US2
5. Quotient space T 2 / D:
Disc
t (0,1) 1' ·-----·-·-·-··--· r-·---·-······--··--······
~ 1
A-10
(-1,0) (0 1 0) l Cl,Ol.l
~ ~~2~~"" ~·~~a f, ""i ill i
1 r ! i (0,-l) j [ e. ~. ···-·····-·········-···-·······-/,·~·· ········-····-········--··--·······..:
2. Stability Sets and Fundamental Domain
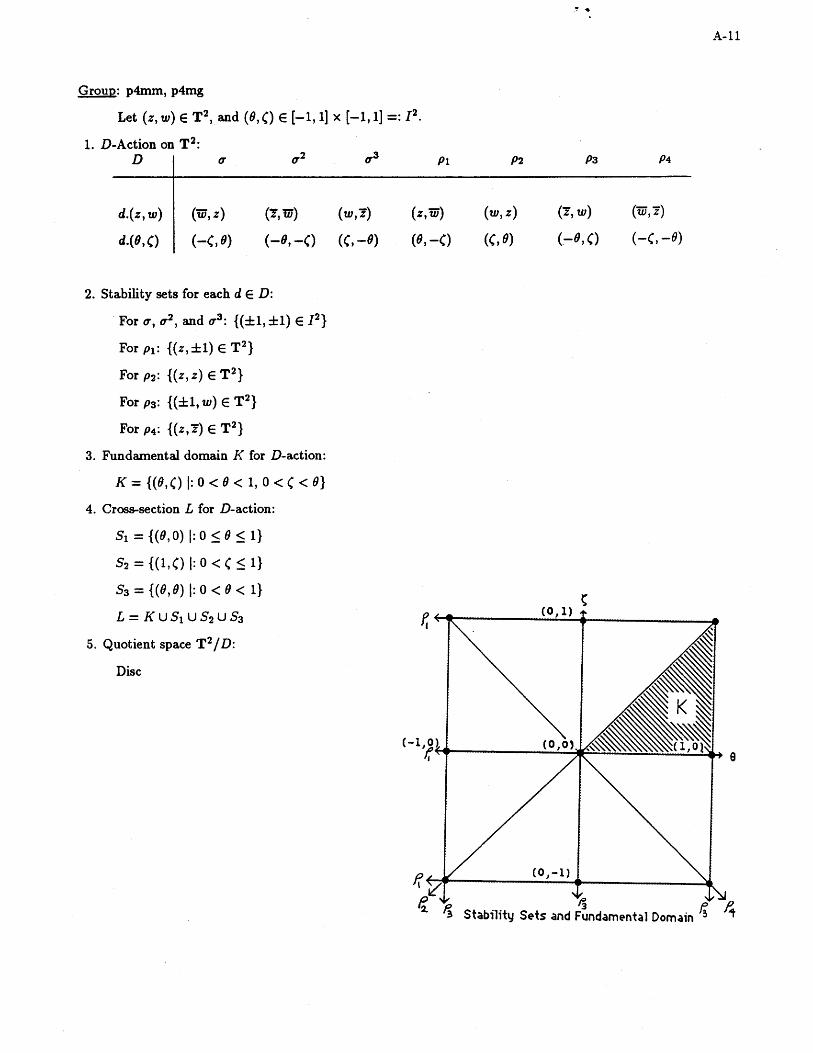
_"! ..
A-ll
Group: p4mm, p4mg
Let {z, w) E T 2 , and (8, () E [-1, 1] x [-1, 1) =: 12•
1. D-Action on T 2 :
D (1 (12
d.(z, w) (w,z) {z,w)
d.(O,() (-(,8) (-8,-()
2. Stability sets for each d E D:
For t1, t12 , and t13 : {{±1, ±1) E 12}
For Pt: {{z,±1) E T 2}
For P2: {{z,z) E T 2}
For p3: {(±1, w) E T 2}
For p4: {(z, z) E T 2}
3. Fundamental domain K forD-action:
K = {(8,() 1: 0 < 8 < 1, 0 < ( < 0}
4. Cross-section L for D-action:
5t = {(0, 0) 1: 0 ~ 0 ~ 1}
s2 ={(I,() I= o < ( ~ 1}
s3 = {(0,8) I= o <8 < 1}
L = K u 5t u 52 u 53
5. Quotient space T 2 / D:
Disc
(13 Pt P2 P3 P4
(w,z) (z,w) (w,z) (z,w) (w,z)
((, -8) (8,-() ((,8) (.-8, () (-(, -0)
~ 0 (0,1) J.~~------~~~----------4
(0,-1)
Stability Sets and ~ndamenta 1 Domain /3 4
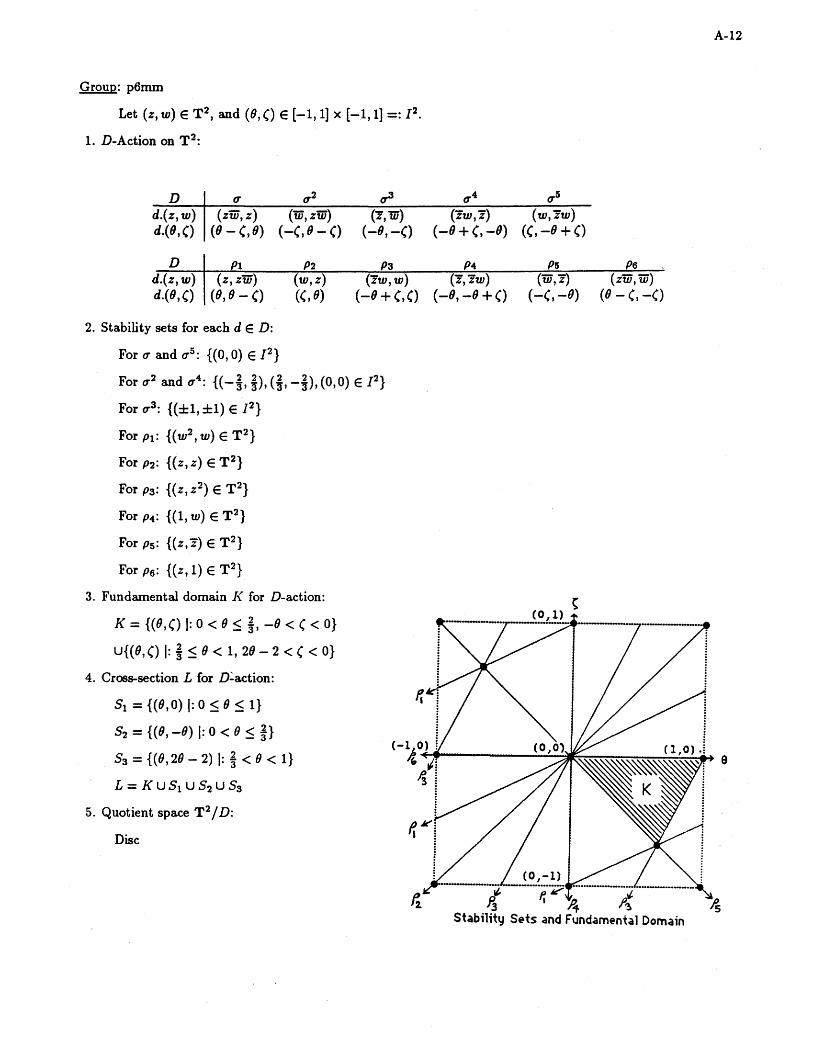
Group: p6mm
Let (z, w) E T 2 , and (9, () E (-1, 1] x (-1, 1] =: 12•
1. D-Action on T 2:
D (T u2 a-3 d.(z, w) (zw, z) (w,zw) (z,w) d.(9,() (9- (, 9) (-(, 9- () (-9, -()
D Pl P2 Pa d.(z,w) (z, zw) (w,z) (zw,w) d.(9,() (9, 9- () ('' 9) (-9 + (,()
2. Stability sets for each d E D:
For u and u5 : {(0, 0) E 12 }
For u 2 and u 4: {( -j, j), (j, -j), (0, 0) E 12 }
For u3 : {{±1, ±1) E 12}
For P1: {(w2 , w) E T 2 }
For P2: {(z, z) E T 2}
For p3: {(z,z2) E T 2
}
For p4: {(1, w) E T 2}
For Ps: {(z, z) E T 2}
For P6: {(z, 1) E T 2 }
3. Fundamental domain I< for D-action:
K = {(9,() 1: 0 < 9 ~ i, -9 < ( < 0}
U{(9,() 1: ~ ~ 9 < 1, 29-2 < ( < 0}
4. Cross-section L for n:action:
A-12
(T4 u5
(zw,z) (w,zw) ( -9 + (, -9) ((, -9 + ()
P4 Ps P6 (z,zw) (w,z) (zw, w)
( -9,-9 + () ( -(, -9) (9- (, -()
s1 = {(9,o) I= o ~ 9 ~ 1}
s2 = {(9, -9) I= o < o ~ il Sa = {( 9, 29 - 2) I: i < 9 < 1}
L = K u S1 u S2 uSa
(-110)
"~~~!--------~~~~~~~~ 9
11 5. Quotient space T 2 / D:
Disc
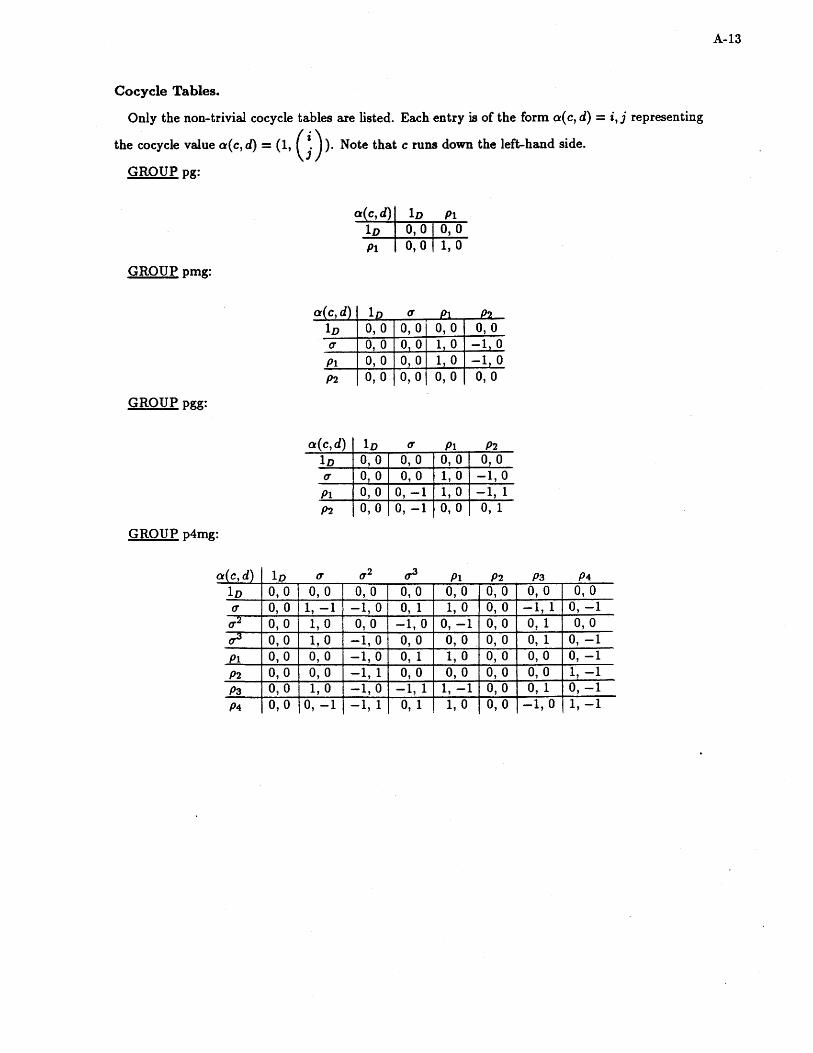
Cocycle Tables.
Only the non-trivial cocycle tables are listed. Each entry is of the form a( c, d) = i, j representing
the cocycle value a( c, d) = (1, ( ~) ). Note that c runs down the left-hand side.
GROUP pg:
Pt 0,0 1, 0
GROUP pmg:
a(c, d) 1n (T p, P2
1D 0,0 0,0 0,0 0, 0 (T 0, 0 0,0 1. 0 -1,0 Pt 0, 0 0,0 1, 0 -1.0 P2 0,0 0,0 0,0 0,0
GROUP pgg:
a(c,d) 1n (T Pt P2
1n 0, 0 0,0 0,0 0,0 (T 0, 0 0,0 1, 0 -1,0 Pt 0, 0 0,-1 1, 0 -1, 1 P2 0,0 0,-1 0, 0 0, 1
GROUP p4mg:
a(c, d) 1n (T (T2 (T3 Pt P2 P3 P4
1D 0,0 0,0 0, 0 0,0 0, 0 0, 0 0, 0 0,0 (T 0, 0 1, -1 -1,0 0, 1 1, 0 0, 0 -1, 1 0, -1
(T'2 0,0 1, 0 0,0 -1,0 0,-1 0, 0 0, 1 0, 0 a-3 0,0 1, 0 -1,0 0, 0 0, 0 0, 0 0, 1 0, -1 Pt 0,0 0,0 -1,0 0, 1 1, 0 0, 0 0, 0 0, -1 P2 0,0 0,0 -1, 1 0, 0 0, 0 0,0 0,0 1, -1 P3 0,0 1, 0 -1,0 -1, 1 1, -1 0,0 0, 1 0,-1 P4 0,0 0,-1 -1, 1 0, 1 1, 0 0,0 -1,0 1, -1
A-13
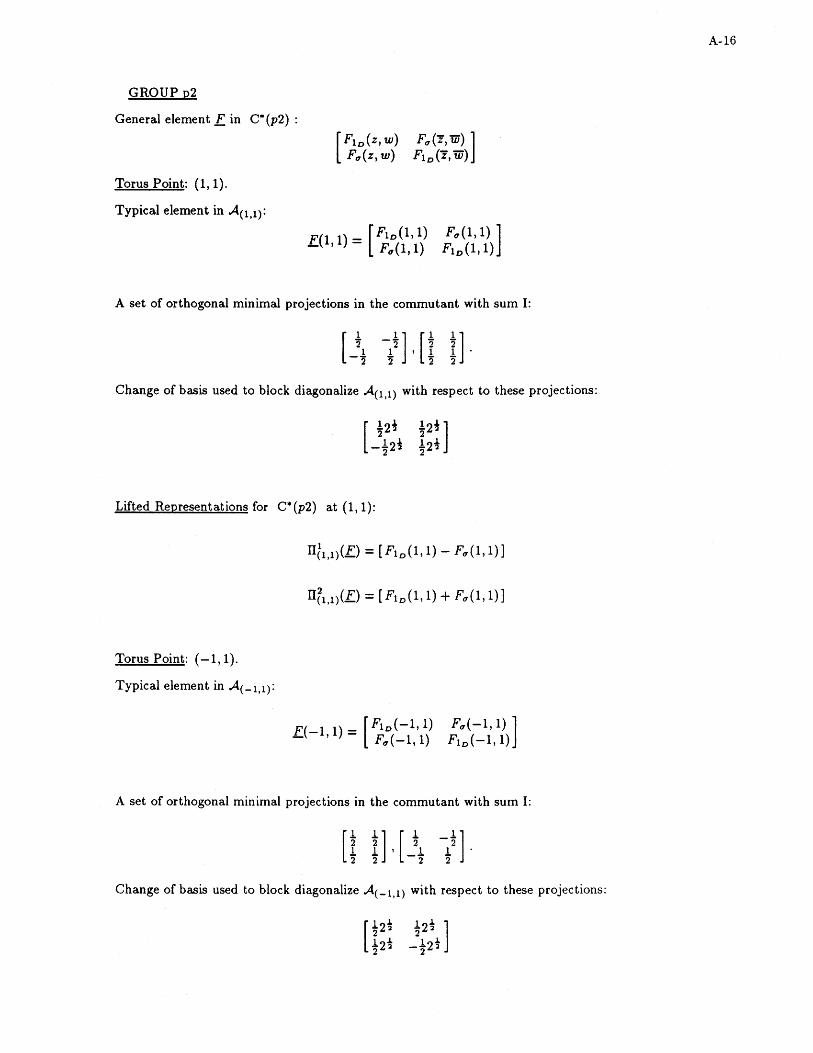
GROUP p2
General element Fin C*(p2) :
Torus Point: (1, 1).
Typical element in A{l,l):
A set of orthogonal minimal projections in the commutant with sum I:
Change of basis used to block diagonalize A{l,l) with respect to these projections:
Lifted Representations for C*(p2) at (1, 1):
Torus Point: ( -1, 1).
Typical element in A(-1,1):
A set of orthogonal minimal projections in the commutant with sum I:
Change of basis used to block diagonalize A( -l,l) with respect to these projections:
A-16
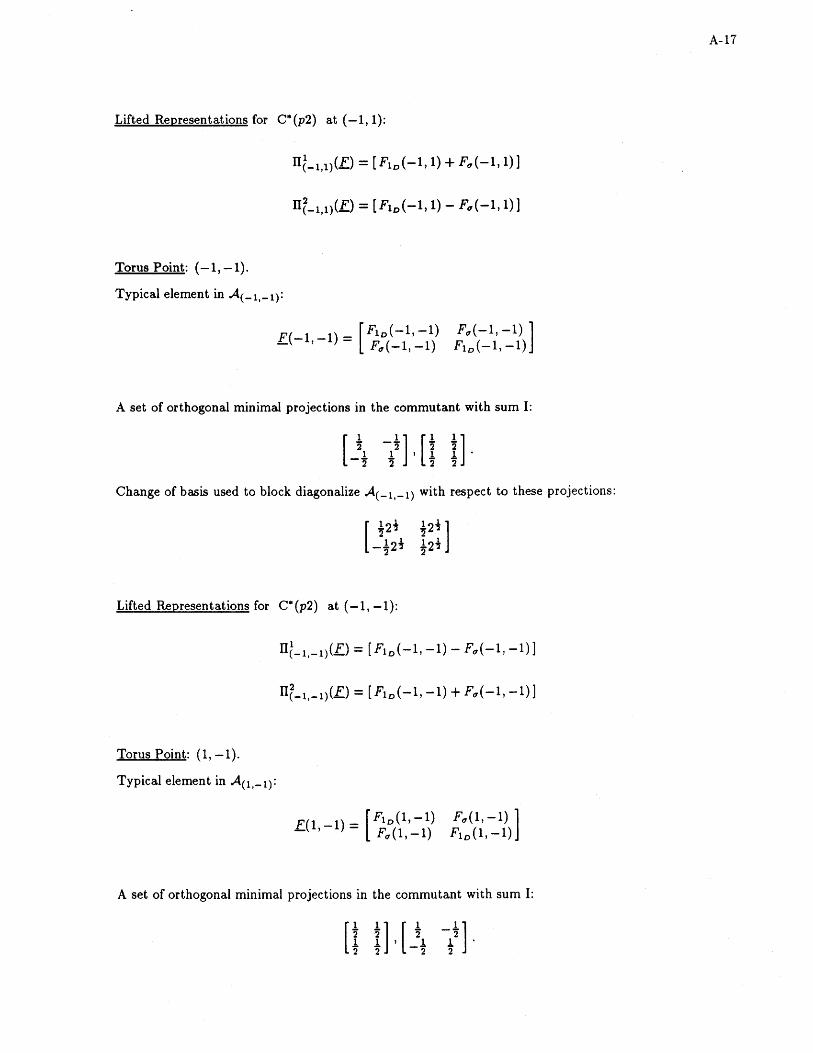
Lifted Representations for C"'{p2) at ( -1, 1):
Torus Point: ( -1, -1).
Typical element in A(-1,-1):
ll(_1,1)(F) = [F1 0 {-1, 1) + Fl7{-1, 1)]
F( _ 1 _ 1) = [ F1 0 ( -1, -1) Fl7( -1, -1) l - ' F17 ( -1, -1) Ft 0 ( -1, -1)
A set of orthogonal minimal projections in the commutant with sum I:
Change of basis used to block diagonalize Ac _1,- 1) with respect to these projections:
Lifted Representations for C"'(p2) at ( -1, -1):
Torus Point: (1, -1).
Typical element in A(l,- 1):
A set of orthogonal minimal projections in the commutant with sum I:
A-17
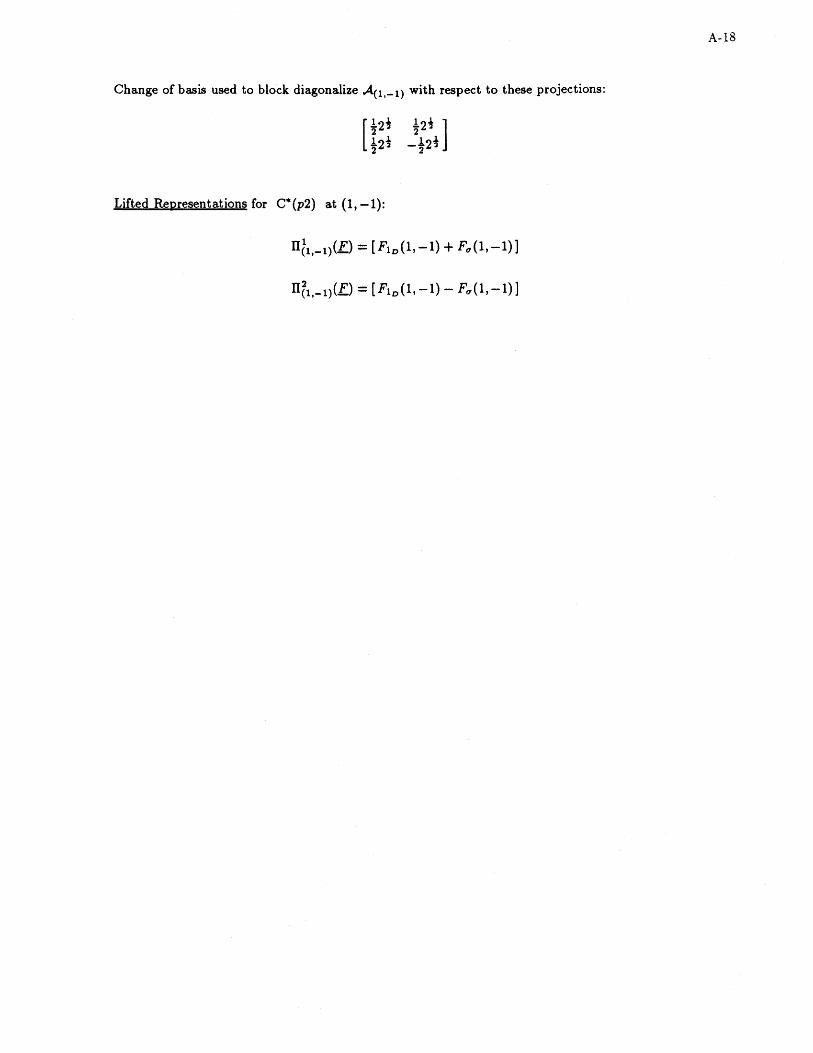
A-18
Change of basis used to block diagonalize A(t,-l) with respect to these projections:
Lifted Representations for C*(p2) at (1, -1):

GROUP p3
General element Fin C*(p3) :
Torus Point: (1, 1).
Typical element in .A(1,1):
A set of orthogonal minimal projections in the commutant with sum I:
[
1 1 1 ] [ 1 1 1 ·; l 1 1 ·; 1
] [ 1 3 3 3 3 -6 - 2z 3-, -6 + 2 1 3-, 3 1 1 1 1 1· 1 1 1 1· 1 1 1· 3 3 3 ' -6 + 21/3" 3 -6- 21/3" ' -6- 2z/3; 1 1 1 1 1 '/3.1 1 1 '/3.1 1 1 1 '/3.,\. 3 3 3 -6- 21 ., -6 + 21 ., 3 -6 + 21 J
Change of basis used to block diagonalize ..4.(1,1) with respect to these projections:
Lifted Representations for C*(p3) at (1, 1):
A-19
1 1 '/3 1 ] -6- 2l . 2
1 1 '/3 I --::- + ':'jl 2 . ti -
1 3
I1[1,1)(F) = ( F1 0 (l, 1)- !Fu,(l, 1) + !( -3); F17 ,(1, 1)- !Fu(1, 1)- !( -3); Fu(l, 1)]
I1~1,l)(F) = ( F1 0 (l, 1)- !F17,(1, 1)- !( -3); Fu,(1, 1)- !Fu(1, 1) + !( -3); Fu(l, 1)]
• .1 . .1 . Torus Pomt: (e- 311'
1, e- 311'1 ).
Typical element in .A( -!tri -!"i): e ,e
A set of orthogonal minimal projections in the commutant with sum I:
1 1 '/3.1 1 1 '/3.1] [ 1 --- -1 , -- + -z , -6 2 6 2 3
i -!- !i/3~ ' -!- !i/3~ _l + 1ij3~ 1 _1 + 1ij3~
6 2 3 6 2
1 1 '/3.l -- + -z 2 6 2 1 3
1 1 '/3.l -6- 2z 2
1 1 '/3.l] -6- 2l 2
1 1 '/3.l -6+2z 2 •
1 3

Change of basis used to block diagonalize A -~•i -~•i with respect to these projections: (e 3 ,e 3 )
Lifted Representations for C*(p3) at (e-t"'i, e-t"'i):
ll2 . . (F) =F (e-!"'i e-!"'i)- ~F :r(e-i"'i e-!"'i) + ~(-3)~ F :r(e-!"'i e-!1ri) (e-i•• ,e-i"'') - lD ' 2 t7 ' 2 t7 '
_ ~F(7( e-!1ri, e-!1ri) _ ~( _ 3) ~ F(7( e-!1ri, e- .;1ri)
ll3 . . (F) =F (e-!"'i e-ilri)- ~F :r(e-!"'i e-!1ri)- ~(-3)~ F :r(e-!ri e-!ri) (e-i••,e-i••)- 1D ' 2 t7 ' 2 t7 '
- ~F(7(e-t"'i, e-!1ri) + ~( -3)~ F(7(e-t"'i, e-t"'i)
Torus Point: (e-j1ri, e-i"'i).
Typical element in A(e-!•i,e-!•i):
A set of orthogonal minimal projections in the commutant with sum 1:
Change of basis used to block diagonalize A _2,..i _2.,; with respect to these projections: ( e 3 ,e 3 )
A-20
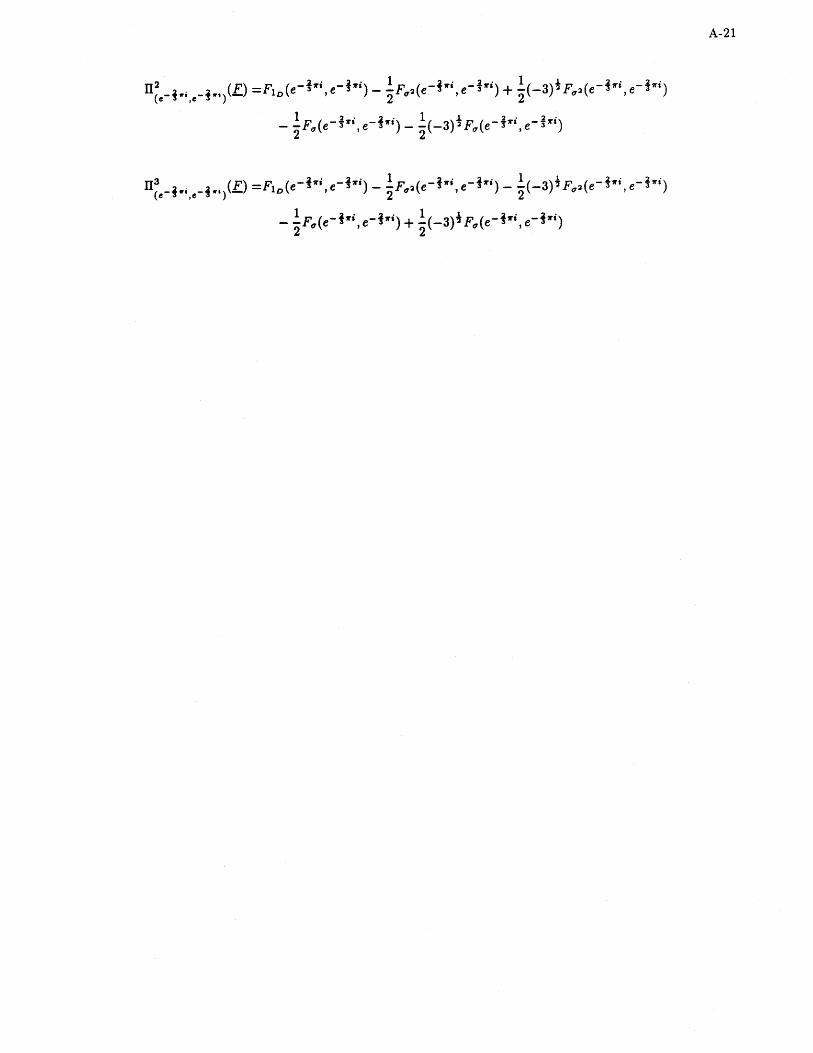
ll~e-i .. ; ,e-i .. ;) (F) =Fto ( e-fw-i, e-fw-i)- ~ Fe12(e-iw-i, e-fw-i) + ~( -3)! Fe12( e- fw-i, e- f""i)
- ~Fe1(e- fw-i, e-fw-i)- ~( -3) 1 Fe1(e- fw-i, e- f""i)
ll~e-i .. i,e-i .. ;/F) =Ft0 (e-iw-i, e-iw-i)- ~Fe12(e-iw-s, e-i""')- 4( -3)1 Fe12(e-i""i, e-i""i)
- 4FC1(e-iw-i, e-iw-i) + ~( -3)1 Fe1(e-jw-i, e-iri)
A-21
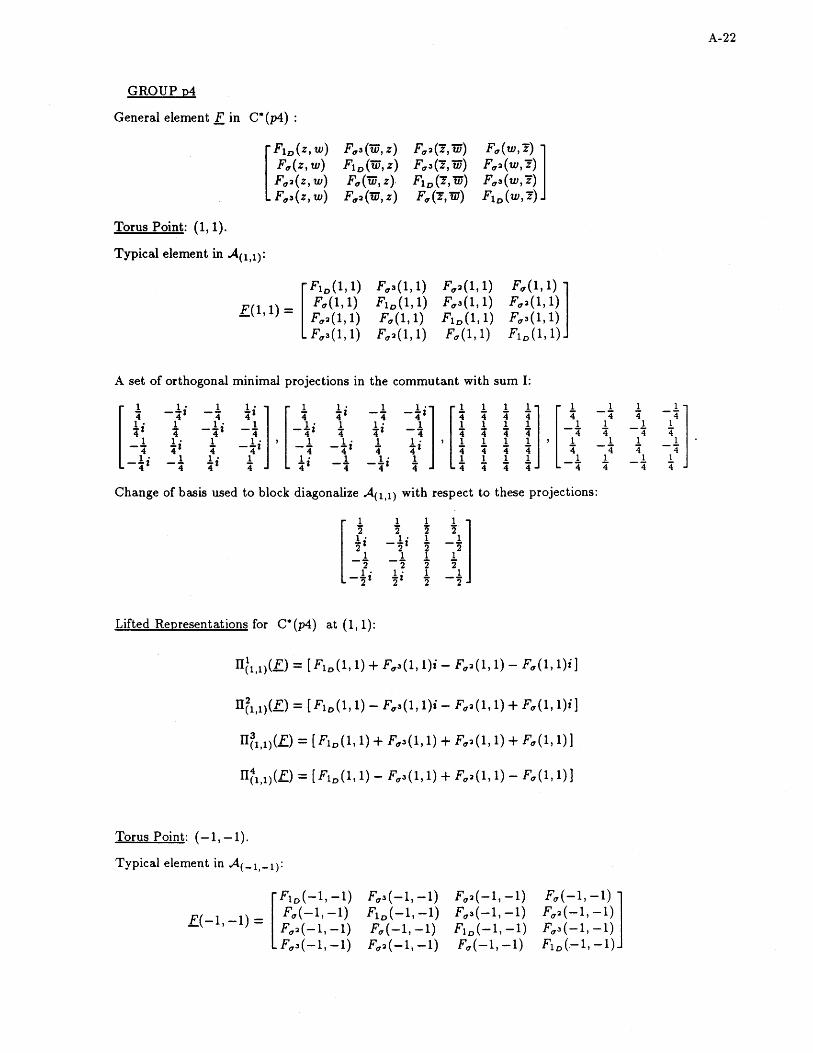
GROUP p4
General element Fin C*(p4) :
Torus Point: (1, 1).
Typical element in .A(1,1):
A set of orthogonal minimal projections in the commutant with sum I:
[ I
1. 1
1 .] [ 1 1 . 1
1] [ 1 1 1 !] [ -\ 4 -41 -4 -1 - 4' -4
~\' I 4 4 1 • 1 1 . ~* -\i 1 1 . 1 1 4' 4 -41 4 4' 4 4
1 1 . 1 1 . ' 1 1 . 1 1 . ' 1 1 1 1 ' 1 -4 4' 4 -41 -4 -41 4 41 4 4 4 4 4 1 . 1 1 . 1 1 . 1 1 . 1 1 1 1 1 1
-41 -4 4' 4 41 -4 -41 4 4 4 4 4 -4
1 -4
1 4
1 -4
1 4
Change of basis used to block diagonalize A(1,1) with respect to these projections:
[ I
1 1
}:] 2 2 2 1 . 1 . 1 2' -2! 2
1 1 1 -2 -2 2
1 . 1 . 1 -21 2' 2
Lifted Representations for C*(p4) at (1, 1):
Il~1 , 1 )(F) = (F1 0 (1, 1)- FC13(1, 1)i- FC1:~(1, 1) + Fe1(1, 1)i]
IIf1,1)(F) = ( F1 0 (1, 1) + FC13(1, 1) + FC1:~(1, 1) + Fe1(1, 1)]
II(1,1)(F) = ( F1 0 (1, 1)- FC13(1, 1) + FC1:~(1, 1)- FC1(1, 1)]
Torus Point: ( -1, -1).
Typical element in .A(-1,-1):
A-22
1
-ttl 4 1
-4 1 1 . 4 -4
1 1 -4 4

A set of orthogonal minimal projections in the commutant with sum 1:
[1 1 1 1] [ 1 1 1 1] [ 1 4 4 4 4 4 -4 4 -4 4 1 1 1 1 1 1 1 1 1· 4 4 4 4 -4 4 -4 4 41 1111' 1 1 1 1' 1 4 4 4 4 4 -4 4 -4 -4 1 1 1 1 _1 1 _1 1 -1i 4 4 4 4 4 4 4 4 4
Change of basis used to block diagonalize .A(-1,- 1) with respect to these projections:
[I 1 1
1 l 2 2 2 1 1 . 1 •
-1 l' ~tl 1 1 2 -2
1 1 • 1 . -2 -21 2'
Lifted Representations for C*(p4) at ( -1, -1):
nt -l,-l)(E.) = [ F1 0 ( -1, -1) + Fq3( -1, -1) + Fql( -1, -1) + Fq( -1, -1)]
llf-1,-1)(F) = [ F10 ( -1, -1)- Fq3( -1, -1) + Fql( -1, -1)- Fq( -1, -1)]
nr-l,-l)(F) = [F1 0 (-1, -1) + Fq3(-1, -1)i- Fql(-1, -1)- Fq(-1, -1)i]
nt-l,-l)(F) = [ F1 0 ( -1, -1)- Fq3 ( -1, -1)i- Fql( -1, -1) + Fq( -1, -1)i]
Torus Point: ( -1, 1).
Typical element in Ac- 1,1):
A set of orthogonal minimal projections in the commutant with sum 1:
0 1
[
! 0
-! ~ 0 -!
~! ~!] [~ ! ~ !] 1 0 '1 010. 2 2 2
0 ! 0 ! 0 ! Change of basis used to block diagonalize Ac _1,1) with respect to these projections:
[ 12" 0 12~
:t~~ 2
12J. 0 2 l
0 121 2
-!2~ 0
A-23
1 "] ~y
1 . . 4z 1 4

A-24
Lifted Representations for C*(p4) at ( -1, 1):
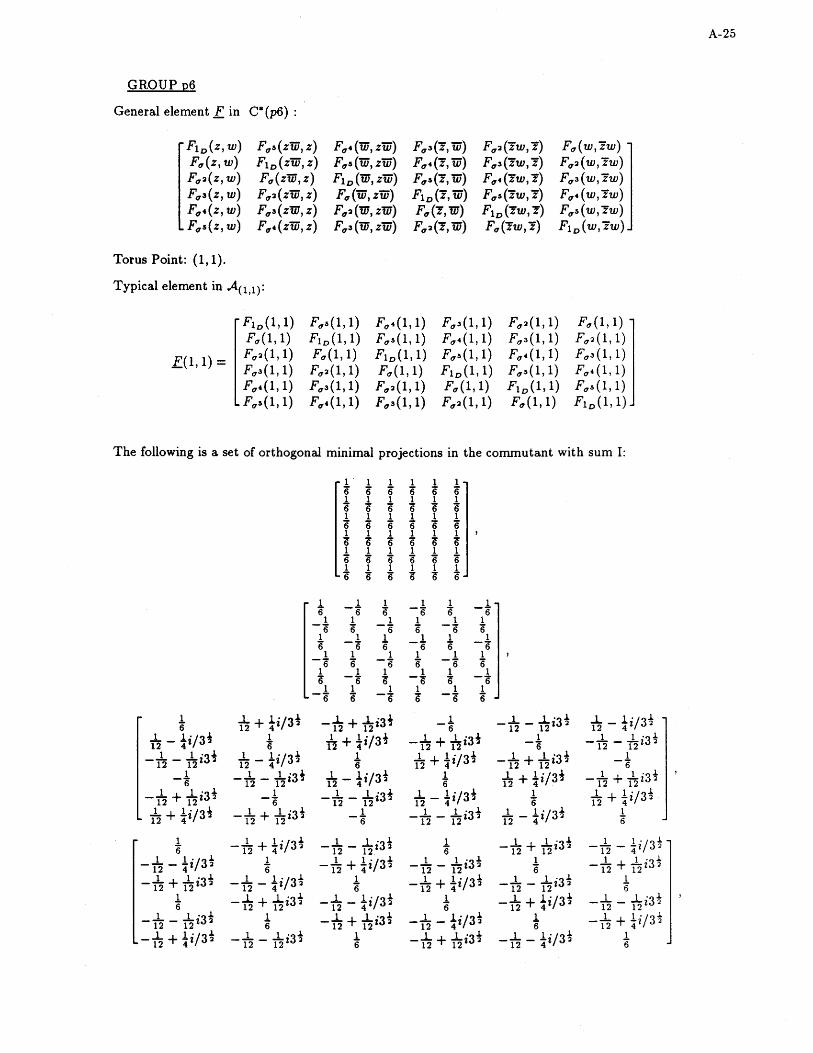
GROUP p6
General element F in C* (p6) :
F1 0 (z, w) FD(z, w) Ff72(z, w) Ff73(z, w) FD•(z, w) FDs(z, w)
FDs(zw, z) F1 0 (zw,z) FD(zw,z) Ff72(zw, z) F(73(zl1J, z) FD•(zw, z)
Torus Point: (1, 1).
Typical element in A(1,1):
FD•(w, zw) FDs(w, zw) F1 0 (w,zw) FD(w,zw) FD,(w,zw) Ff73(w, zw)
F(73(z, w) FD•(z, w) FDs(z, w) F1 0 (z, w) FD(z, m) Ff72(z, w)
FD,(zw, z) Ff73(zw, z) FD·(zw, z) FDs(zw, z) F10 (zw, z) FD(zw, z)
FD(w,zw) Ff72(w, zw) F(73(w, zw) FD•(w,zw) FDs(w, zw) F1 0 (w,zw)
F1 0 (1, 1) FDs{1, 1) F(7·{1,1) F(73(1, 1) F(72(1, 1) F(7(1,1) F(7(1, 1) F10 (1,1) FDs{1, 1) F(7·(1, 1) F(73(1, 1) F(72(1, 1)
F(1, 1) = F(72(1, 1) F(7(1, 1) F1 0 {1, 1) FDs{1, 1) F(7·(1, 1) F(73(1,1) F(73(1, 1) F(72(1, 1) F(7(1, 1) F1 0 (1, 1) FDs{1, 1) F(7·(1,1) F(7·(1, 1) F(73 ( 1, 1) F(7,(1,1) F(7(1,1) F1 0 (1,1) FDs(1, 1) FDs(1, 1) FD·(l, 1) F(73(1, 1) F(72(1, 1) F(7(1,1) F1 0 (1,1)
The following is a set of orthogonal minimal projections in the commutant with sum I:
1 . 1 1 1 1 1 6 6 6 6 6 6 1 l 1 1 1 1 6 6 6 6 6 6 1 1 1 1 1 1 6 6 6 6 6 6 1 1 1 1 1 1 6 6 6 6 6 6 1 1 1 1 1 1 6 6 6 6 6 6 1 1 1 1 1 1 6 6 6 6 6 6
1 1 1 1 1 1 6 -6 6 -6 6 -6 1 1 1 1 1 1
-6 6 -6 6 -6 6 1 1 1 -l 1 1 6 -6 6 6 -6 1 1 1 1 1 1
-6 6 -6 6 -6 6 1 1 1 1 1 1 6 -6 6 -6 6 -6
1 1 1 1 1 1 -6 6 -6 6 -6 6
l n + ti/31 ..1. ..1.. '31 1 ..1. 1 '3 .1 1 1 "/3.1 6 -12+ 12 1 -6 -12 - 121 2 -- -z 2 12 4
112 - ii/31 1 112 + ii/31 1 1 '31 1 1 1 '3l 6 -12 + 121 -6 -12- 121 2
1 1 '3 .1 1 1 '/3.1 1 1 1 '/3.1 1 1 '3 .1 1 -12- 121 2 -- -z 2 6 12 + 4% 2 -12 + 121 2 -6 12 4 -l - 112 - 112 i31 1 1 '/3.1 l 1 + 1 '/3.1 1 1 '3 .1 -- -z 2 12 4' 2 - 12 + 12 z 2 12 4 6
1 1 '3 .1 1 _..L- ..Li31 1 1 '/3.1 1 1 + 1 '/3l -12 + 121 2 -6 -- -z 2 6 12 4' 2 12 12 12 4 1 + 1 '/3.1 1 1 '31 1 1 1 '3 .1 1 1 '/3.1 1
12 4' 2 -12 + 121 -6 -12- 121 2 -- -z 2 6 12 4
1 1 1 '/3.1 1 1 '3 .1 1 _..L + ..Li31 1 1 "/3.1 6 -- + -z 2 -12- 121 2 6 -12- 4z 2 12 4 12 12 1 1 '/3j, 1 1 1 '/3j, 1 1 '3 j, 1 1 1 '3 j, -12- 41 2 6 -- + -z 2 -12- 121 2 6 -12 + TIZ 2 12 4 1 1 '3 j, 1 1 '/3j, 1 1 1 '/3j, 1 1 '3 j, 1
-12 + 12 1 2 --- -z 2 6 -- + -z 2 -12- 121 2 6 12 4 12 4 l 1 1 '3 .1 -l2- ti/31 l 1 1 "/3j, 1 1 '3 j, - 12 + 12z 2 -- + -z 2 -12- Til 2 6 6 12 4
1 1 '3 j, l 1 ..1. '3j, _112 - ti/31 l 1 1 '/3j, -12-12 1 2 -n+ 12 1 2 -- + -z 2 6 6 12 4 1 1 '/3j, _..L- ..l.i31 l 1 ..1. .3j, 1 1 '/3j, 1 -- + -z 2 -n+ 12 1 2 6 12 4 12 12 6 -12- 41 2
A-25

A-26
..!... + lij3! 12 4
1 1 "3 1 -n + 121 ~ 1 -s-
-1~ - l~i3! 1 1 "/31 T2- 4' 2
1 6
Lifted Representations for C* (p6) :
4 1 1 1 1 1
IT(l,1)(F) =[-2 F~:a(1, 1)-2
( -3)~ F~:a(1, 1) + 2
( -3)' F~(1, 1) + F~3(1, 1)
1 ~ 1 ~ 1 1 1 - 2(-3) 2 F~~(1, 1) + 2(-3) 2 F~·(1, 1)- 2F~·(1, 1) + Ft 0 (1, 1)- 2F~(1, 1)- 2Fas(1, 1)]

Torus Point: ( -1, 1).
Typical element in .A(-l,l):
F(-1,1)=
F1 0 ( -1, 1) Fo( -1, 1) F02( -1, 1) F0 r.( -1, 1) F0 •( -1, 1) F0 r.( -1, 1)
For.( -1, -1) Fl0 (-1, -1) Fo( -1, -1) F02( -1, -1) F03( -1, -1) Fo•( -1, -1)
Fo•(1, -1) F0 s(1,-1) F10 (1,-1) Fo(1, -1) F0 2(1, -1) F0 3(1, -1)
F03( -1, 1) Fo•(-1,1) F0 r.( -1, 1) F1 0 (-1, 1) Fo(-1, 1) F02( -1, 1)
F02( -1, -1) F03( -1, -1) F0 •( -1, -1) F0 r.( -1, -1) F10 ( -1, -1) Fo( -1, -1)
A set of orthogonal minimal projections in the commutant with sum 1:
1 0 0 1 0 0 2 2 0 1 0 0 1 0 2 2 0 0 1 0 0 1
2 2 1 0 0 1 0 0 ' 2 2 0 1 0 0 1 0 2 2 0 0 1 0 0 1
2 2
1 0 0 1 0 0 2 -2 0 i 0 0 1 0 -2 0 0 1 0 0 1
2 -2 1 0 0 1 0 0 -2 2
0 1 0 0 1 0 -2 2 0 0 1 0 0 1
-2 2
Change of basis used to block diagonalize .A(- 1,1) with respect to these projections:
0 121 2 ~ 0 0 12! 2 0
0 0 !2; 0 0 12! 2
12! 2 0 0 12!
2 0 0
0 121 2 ~ 0 0 -t2! 0
0 0 12! 2 0 0 -t2!
12! 2 0 0 -i2; 0 0
Lifted Representations for C*(p6) at ( -1, 1):
Fo(1, -1) F0 :or{1, -1) F0 3(1, -1) F0 •(1,-1) F0 r.(1, -1) F1 0 (1, -1)
[
F10 (1, -1) + F0 3(1, -1) F0 2( -1, 1) + F0 r.( -1, 1) Fo( -1, -1) + F0 •( -1, -1) ] II(-1,1)(F) = Fo•(1,-1) + Fo(1,-1) F1 0 (-1, 1) + F0 3(-1, 1) F0 r.(-1,-1) + Fo:or(-1, -1)
For.(1, -1) + F0 :or(1, -1) Fo( -1, 1) + Fo .. ( -1, 1) F1 0 ( -1, -1) + F03( -1, -1)
J. . ~ . TorusPoint: (-e3~'~"~,e-3n).
Typical element in A( ~ ,.., _ .:~. •i : -e"l" ,e "3 )
A-27

F( -el1ri, e-f"'i) =
Flo Fq,. Fq• Fq:s Fq~ Fq Fq F1 0
Fq,. Fq. Fq:s Fq~
Fq~ Fq Flo Fq,. Fq• Fq:s ( -ei"'i, e-i"'i) Fq:s Fq~ Fq Flo Fq'- Fq• Fq. Fq:s Fq~ Fq Flo Fq'-Fq,. Fq. Fqs Fq, Fq Flo
A set of orthogonal minimal projections in the commutant with sum 1:
1 l 0 -l + !il31 0 -l- !il31 0 i 0 -i + !il31 0
0 3 -i- !il31 0
1 -i - !il31 0 i 0 -i + !il31 0 3 0 -i - !il3; 0 i 0 1 1 '13 1 -6 + 2 1 .,
1 1 '13 1 0 1 1 '13 1 0 1 -6 + 2 1 ., -6 - 2 1 ., 3 0
0 -i + !il3i 0 -i - !il3i 0 1 3
1 1 1 I .1 1 1 .13 1
0 3 0 -6 - 2i 3~ 0 -6 + 2z 'l
0 1 0 1 1 '13.1 0 1 1 'l3.l 3 -6 - 2z ~ -6 + 21 2
-l + !il31 0 l 0 -l- !il31 0 1 1 I .l 1 0 1 1 .13.1 0 -6 + 2i 3~ 0 3 -6 - 2z 2
-i - !il31 0 -i + !il31 0 i 0
0 -i- !il31 0 -i + !il31 0 i Change of basis used to block diagonalize A _t,.; _2.,;) with respect to these projections:
(-e'! ,e 3"
13! 0 0 13! 13! 0 3 3 3
0 13.1 13! 0 0 131 3 2 3 3
31(-t- !il31) 0 0 13.l 3 2 .l( 1 1·1 .l) 32 - 6 + 2 1 32 0
0 1 3 0
0 31( -l- !il31) 13.l 3 2 0 0 .l( 1 1'/3.1) 32 - 6 + 2 1 2
31(-i + !il31) 0 0 131 3
.l( 1 1'13.1) 32 - 6 - 2z 2 0
0 31(-i + !il31) 131 3 0 0 .l( 1 1 '/3.l) 32 - 6 - 2 z 2
Lifted Representations for C*(p6) at ( -el"'i, e-i11'i):
[F + 31i-lp _rl.w.p 1o 2 <7 4 2 <7 2
F + J~i-lp - 3~i±1p o 2 o" 2 o3
A-28
0 1 0 1 0 3 3 1 0 1 0 1 3 3 3 0 1 0 1 0 3 3 1 0 1 0 1 3 3 3 0 1 0 1 0 3 3 1 0 1 0 1 3 3 3

GROUPcm
General element Fin C*(cm) :
[Ft 0 (z,w) Fp 1 (z,zw) l Fp1 (z, w) Ft 0 (z, zw)
Torus Point: (w2 , w) for all wET have non-trivial and equal isotropy subgroup.
Typical element in A(w,,w):
A set of orthogonal minimal projections in the commutant with sum I:
Change of basis used to block diagonalize A(wl,w) with respect to these projections:
Lifted Representations for C*(cm) at (w2 , w):
A-29

GROUPpm
General element Fin c•(pm) :
[F1 0 (z,w) Fp 1 (z,w)] FPl (z, w) Flo(z, w)
Torus Point: (z, 1) for all z E T have non-trivial and equal isotropy subgroup.
Typical element in A(z,l):
A set of orthogonal minimal projections in the commutant with sum 1:
[ t t] ' [ }! -t!] . Change of basis used to block diagonalize A(z,l) with respect to these projections:
[ 121 121 ] t2' .:!2'
Lifted Representations for C*(pm) at (z, 1)
ll(z,l)(F) = [F1 0 (z, 1) + Fp 1 (z, 1)]
llfz,l)(F) = [F1 0 (z, 1)- Fp 1 (z, 1)]
Torus Point: (z, -1) for all z E T have non-trivial and equal isotropy subgroup.
Typical element in A(z,-1):
A set of orthogonal minimal projections in the commutant with sum 1:
[ t t] ' [it -/] . Change of basis used to block diagonalize A(z,-l) with respect to these projections:
[ 121 121 ] !2; -
2
!21
Lifted Representations for C*(pm) at (z, -1)
ll(z,-l)(F) = [ F1 0 (z, -1) + Fp1 (z, -1)]
llfz ,-l)(.E) = [ F1 0 (z, -1) - Fp 1 (z, -1)]
A-30
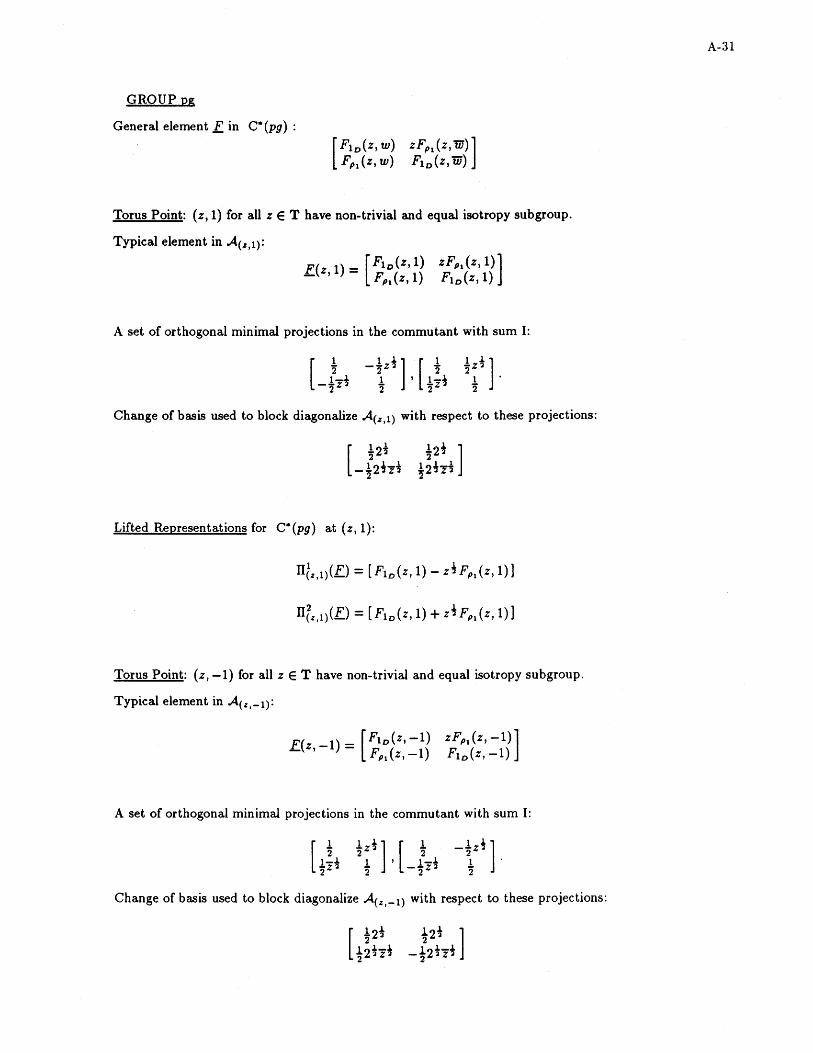
GROUP pg
General element Fin C*(pg) :
Torus Point: (z, 1) for all z E T have non-trivial and equal isotropy subgroup.
Typical element in A(z,l):
A set of orthogonal minimal projections in the commutant with sum I:
Change of basis used to block diagonalize A(z,l) with respect to these projections:
Lifted Representations for C*(pg) at (z, 1):
Torus Point: (z, -1) for all z E T have non-trivial and equal isotropy subgroup.
Typical element in A(z,-1):
A set of orthogonal minimal projections in the commutant with sum I:
-~z~ l 1 . 2
Change of basis used to block diagonalize A(z,-l) with respect to these projections:
A-31
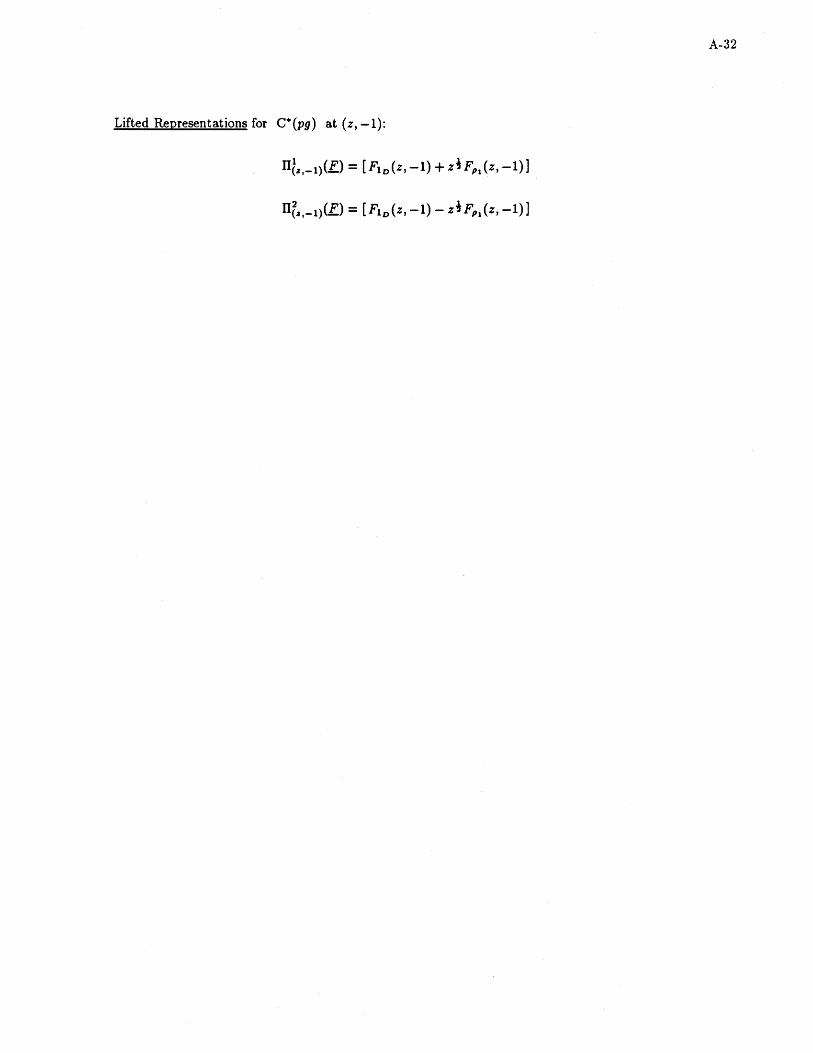
Lifted Representations for C*(pg) at (z, -1):
rrtz,-l)(F) = [F1 0 (z,-l) + z;Fp1 (z,-1)]
IIfz,-l)(F) = [ F1 0 (z, -1)- z; Fp 1 (z, -1)]
A-32

GROUP cmm2
General element F in C*(cmm2) :
Torus Point: (1, 1).
Typical element in A(1,1):
Fp 1 (z, zw) Fp2 (z, zw) Ft 0 (z,zw) Ft7(z, zw)
A set of orthogonal minimal projections in the commutant with sum I:
Change of basis used to block diagonalize A(l,l) with respect to these projections:
Lifted Representations for C*(cmm2) at (1, 1):
Df1,1)(F) = ( Ft0 (1, 1)- Ft7(1, 1)- Fp 1 (1, 1) + Fp2 (1, 1))
n~l,l)(F) = [F1o(l, 1) + Ft7(1, 1) + FP1 (1, 1) + Fp'J(1, 1)]
n{ 1,1) (.E.) = [ F1 D ( 1, 1) - Ft7 ( 1 , 1) + Fp. ( 1, 1) - Fp2 ( 1 , 1) ]
Torus Point: (w2 , w) for all w E T such that Im(w) < 0 and Re(w) ~ 0 OR Im(w) > 0 and
Re( w) 2: 0 all have non-trivial and equal isotropy subgroup.
Typical element in A(w2,w):
A-33

A set of orthogonal minimal projections in the commutant with sum I:
2 0 0 1
[
1
-i ~ 0 -i
0 _1 0 1 0 1 2 2 .2 -! 0 l [! 0 i 0]
i 0 'i 0 i 0. 0 ! 0 i 0 !
Change of basis used to block diagonalize .A(w~,w) with respect to these projections:
Lifted Representations for C*(cmm2) at (w2 , w):
n2 ~ (F)= [F1 0 (w2, w) + Fp 1 (w
2, w) F(f(w2
, w) + Fp~(w2 , w) ] (w ,w)- F ... (w2 , w) + Fp .. (w2 , w) F (w2 -w) + F (-w2 -w)
., • 1o ' Pl '
Torus Point: ( -1, 1).
Typical element in .A(- 1,1):
A set of orthogonal minimal projections in the commutant with sum I:
[
i -i -! ! 0 0 0 0
0 0 l [1 1 0 0] 2 2 0 0 1 1 0 0 1 _1 ' ~ ~ 1 1 . 2 2 2 2
_1 1 0 0 1 1 2 2 2 2
Change of basis used to block diagonalize .A( _ 1,1) with respect to these projections:
[ 12, 0 124 2 2 2 2 -r 0 121 2
121 0 2
-!21 0
Lifted Representations for C*(cmm2) at ( -1, 1):
A-34

Torus Point: (1, -1).
Typical element in .A(l,-1):
A set of orthogonal minimal projections in the commutant with sum 1:
Change of basis used to block diagonalize .A(l,- 1) with respect to these projections:
[Jt 1 1
ll 2 2 1 1
-2 -2 1 1 2 -2
1 1 -2 2
Lifted Representations for C*(cmm2) at (1, -1):
!Ill
Torus Point: (1, w) for all w E T such that Im(w) < 0 all have non-trivial and equal isotropy
subgroup.
Typical element in .A(l ,w r
A-35

A-36
A set of orthogonal minimal projections in the commutant with sum I:
0 ! -! 0 0 ! ! 0
[ ! 0 0 -!] [! 0 0 !] 0 _1 ! 0 , 0 1 ! 0 .
2 2 2 2 -! 0 0 ! ! 0 0 !
Change of basis used to block diagonalize A(1,w) with respect to these projections:
[ 12! 0 12~
2 2 0 12~ 0 2 0 -!2~ 0 1 1 0 121 -22" 2 .,
Lifted Representations for C*(cmm2) at (1, w):
II 2 (F)_ [F1 0 (1,w) + Fp2 (1,w) F(1(1,w) + Fp1 (1,w) l (1,w) - - Fu(1, w) + Fp
1 (1, w) F1 0 (l, w) + Fp2 (1, w)

GROUP pmm2
General element Fin C*(pmm2) .
Torus Point: (1, 1).
Typical element in .A(1,1):
A set of orthogonal minimal projections in the commutant with sum I:
1 1] [1 1 1 1] [ 1 4 -4 4 4 4 4 4
-* * * * * * -! 1 1 '1 111' 1 4 -4 4 4 4 4 -4 1 1 1 1 1 1 1 -4 4 4 4 4 4 4
1 1 l [ 1 -4 -4 4
-* -* -* 1 1 ' 1 4 4 4 1 1 1 4 4 -4
Change of basis used to block diagonalize .A(1,1) with respect to these projections:
Lifted Representations for C*(pmm2) at (1, 1):
llf1,1)(F) = ( Fto (1, 1)- F(7(1, 1) + Fp 1 (1, 1) - Fp2 (1, 1))
ll~1 , 1 )(F) = [ Ft 0 (1, 1) + F(7(1, 1) + Fp 1 (1, 1) + Fp1 (1, 1)]
nt1,1)(F) = [Ft 0 (1, 1)- F(7(1, 1)- Fp1 (1, 1) + Fp1 (1, 1)]
Torus Point: (1, w) for all wET such that Im(w) > 0 have non-trivial and equal isotropy subgroup.
Typical element in .A(l,w):
A-37
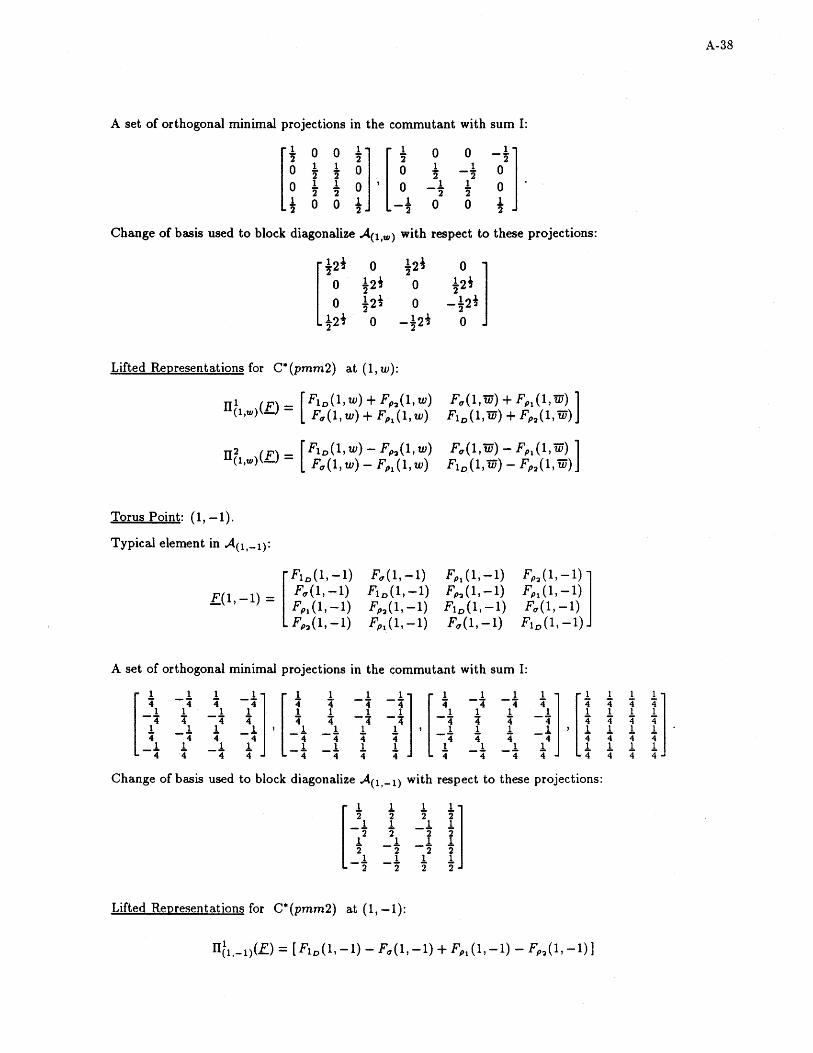
A set of orthogonal minimal projections in the commutant with sum 1:
[ ~ } ! gl [ ~ ! ~! ~!] 0 l l 0 ' 0 _l 1 0 .
2 2 2 2 t 0 0 t -! 0 0 !
Change of basis used to block diagonalize A(t,w) with respect to these projections:
Lifted Representations for C*(pmm2) at (1, w):
Torus Point: (1, -1).
Typical element in A(l,- 1):
A set of orthogonal minimal projections in the commutant with sum I:
Change of basis used to block diagonalize .A(l,- 1) with respect to these projections:
Lifted Representations for C*(pmm2) at (1, -1):
A-38
!Ill·

ll(1,-t)(F) = [ F1 0 (1, -1) + Fe1(l, -1) + Fp1 (1, -1) + Fp2 (1, -1)]
Torus Point: (z, -1) for all z E T such that Im(z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(z,-1):
A set of orthogonal minimal projections in the commutant with sum I:
2 0 0 .!.
[
1
-t ~ 0 -t
~! ~!] , [~ i ! i]. 0 .!. 0 -2
1 0 .!. 2 2
Change of basis used to block diagonalize .A(z,- 1) with respect to these projections:
[ 12! 0
~i2; 121 2 .,
0 1 J. -222
Lifted Representations for C*(pmm2) at (z, -1):
Torus Point: ( -1, -1).
Typical element in .A( -1, _ 1):
121 2 .,
0 12; 2
0
A-39

A set of orthogonal minimal projections in the commutant with sum 1:
[
1 1 1 1] [ 1 1 1 1] [1 1 1 1] [ 1 4 -4 4 -4 4 4 -4 -4 4 4 4 4 4 -! i -! t i i -! -! i i i i -! 1 1 1 1, 1 1 1 1,1111, 1 4 -4 4 -4 -4 -4 4 4 4 4 4 4 -4 1 1 1 1 1 1 1 1 1111 1
-4 4 -4 4 -4 -4 4 4 4 4 4 4 4
Change of basis used to block diagonalize .A(-1,-1) with respect to these projections:
[}: 1 1
~t l 2 2 1 1 2 2 1 1
-2 2 1 1 -2 2
Lifted Representations for C*(pmm2) at ( -1, -1):
IIl-1,-1lF) = [ F1 0 ( -1, -1) + F<T( -1, -1)- Fp1 ( -1, -1)- Fp2 ( -1, -1)]
II( -1,-1)(F) = [ F1 0 ( -1, -1) + F<T( -1, -1) + Fp 1 ( -1, -1) + Fp2 ( -1, -1)]
I1(_ 1,- 1)(F) = [ F1 0 ( -1, -1)- F<T( -1, -1)- Fp1 ( -1, -1) + Fp2 ( -1, -1)]
-\] 1 . -4
1 4
Torus Point: (-1,w)forallw E Tsuchthatlm(w) > Ohavenon-trivialandequalisotropysubgroup.
Typical element in .A(-1,w):
A set of orthogonal minimal projections in the commutant with sum 1:
[l 0 0 !] [ ! 0 0 -!] 0 t t 0 0 t -t 0 0 1 1 0 ' 0 _1 1 0 .
2 2 2 2
t 0 0 t -t 0 0 t Change of basis used to block diagonalize .A(-l,w) with respect to these projections:
0 0 12.1. 2 2
12.1. 2 2
12.1. 2 2 -!2~ 0 0
A-40

Lifted Representations for c• (pmm2) at ( -1, w ):
rrt (F)- [.FtD(-1,w)+Fp2 (-1,w) F~(-1,w)+Fp1 (-1,w)] (-t,w)-- F~(-1,w)+Fp1 (-1,w) FtD(-1,w)+Fp2 (-1,w)
II2 (F)_ [FtD(-1,w)- Fp2 (-1,w) F~(-1,w)- Fp1 (-l,w)] (-t,w)- - F~(-1,w)- Fp
1(-1,w) F1D(-1,w)- Fp2 (-1,w)
Torus Point: ( -1, 1).
Typical element in A(- 1,1):
Fp,( -1, 1)] Fp 1 ( -1, 1) F~(-1, 1)
FtD(-1,1)
A set of orthogonal minimal projections in the commutant with sum I:
[ i -i t -i l [ t t -i -i l [ t -i -i t l [ * 1 1 1 1 1 1 1 1 1 1 1 1 1
-4 4 -4 4 4 4 -4 -4 -4 4 4 -4 4 1 1 1 1' 1 1 1 1' 1 1 1 1 '1 4 -4 4 -4 -4 -4 4 4 -4 4 4 -4 4
1 1 1 1 1 1 1 1 1 1 1 1 1 -4 4 -4 4 -4 -4 4 4 4 -4 -4 4 4
Change of basis used to block diagonalize A(- 1,1) with respect to these projections:
Lifted Representations for C*(pmm2) at (-1, 1):
II(_ 1,1)(F) = (F1D(-1, 1)- F~(-1, 1) + Fp 1 (-1, 1)- Fp,(-1, 1)]
IIl-1, 1)(F) = [ F1D( -1, 1) + F~( -1, 1)- Fp 1 ( -1, 1) - Fp,( -1, 1)]
II~ _1,1)(F) = ( F1D ( -1, 1)- F~( -1, 1) - Fp 1 ( -1, 1) + Fp,( -1, 1)]
II{-t,1)(F) = [ FtD( -1, 1) + F~( -1, 1) + Fp 1 ( -1, 1) + Fp,( -1, 1)]
!Ill·
Torus Point: (z, 1) for all z E T such that Im(z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(z,l):
Fp,(z, 1)] Fp 1 (z, 1) F~(z, 1)
F1 0 (z, 1)
A-41

A set of orthogonal minimal projections in the commutant with sum 1:
2 0 0 1
[
1
-! ~ 0 -!
-! 0 l [! 0 ! 0] 0 -t 0 t 0 t 1 0 '1 010. 2 2 2 0 t 0 ! 0 t
Change of basis used to block diagonalize .A(z,l) with respect to these projections:
Lifted Representations for c•(pmm2) at (z, 1):
A-42
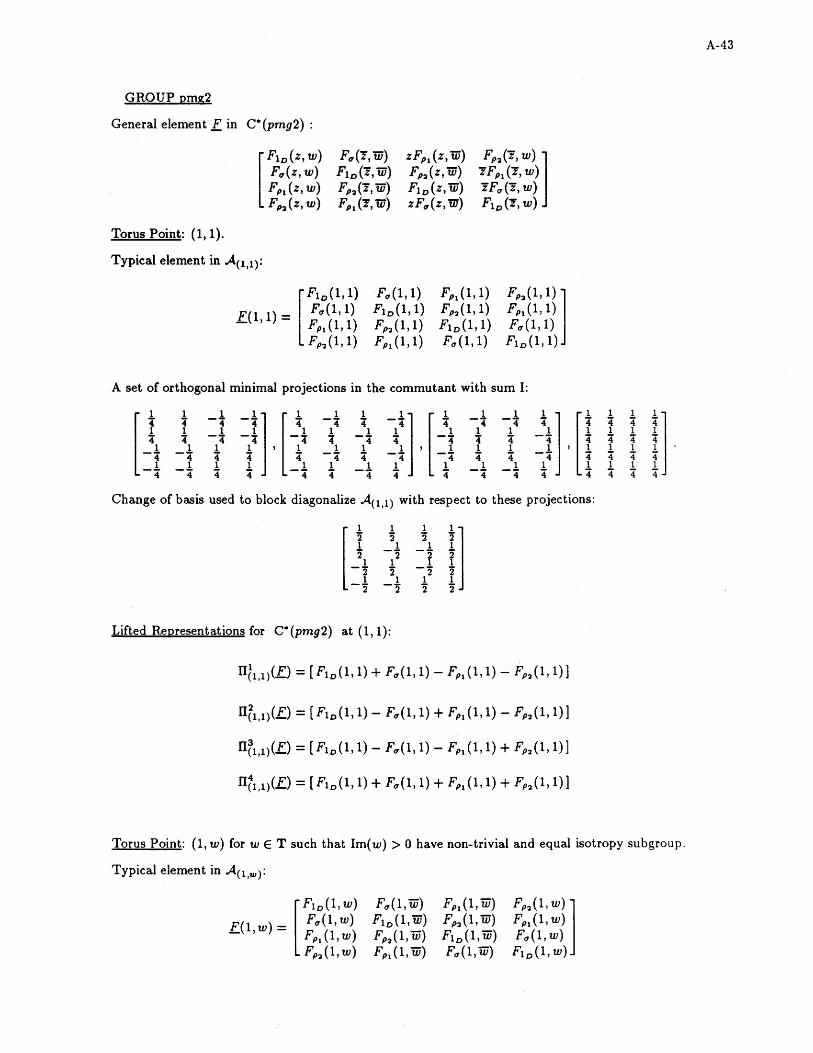
GROUP pmg2
General element Fin C*(pmg2) :
Torus Point: (1, 1).
Typical element in .A(l,l):
zFp 1 (z, w) Fp2 (z, w) Ft 0 (z, w) zF(7(z, tii)
A set of orthogonal minimal projections in the commutant with sum 1:
Change of basis used to block diagonalize .A(l,l) with respect to these projections:
Lifted Representations for C*(pmg2) at (1, 1):
ITl1,1)(F) = ( Ft 0 (1, 1)- F(7(1, 1) + Fp1 (1, 1)- Fp2 (1, 1)]
n~l,l)(F) = (FtD(1, 1)- F(7(1, 1)- FPt (1, 1) + Fp'J(1, 1) 1
IT(1,1)(F) = ( FtD(1, 1) + F(7(1, 1) + Fp 1 (1, 1) + Fp2 (1, 1)]
I Ill
Torus Point: (1, w) for wET such that Im(w) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(l,w):
A-43

A set of orthogonal minimal projections in the commutant with sum 1:
[ t ! ~t ~il [g ! ! gl 0 _1 1 0 , 0 1 -21 0 .
2 2 2 -~ 0 0 ~ ~ 0 0 ~
Change of basis used to block diagonalize .A(l,w) with respect to these projections:
Lifted Representations for C*(pmg2) at (1, w):
II1 (F)_ [ F10 (1, w)- Fp,(l, w) F11(l, w)- Fp 1 (1, w) l (l,w)- - F11 (1,w)- Fp
1(1,w) F10 (1,w)- Fp,(1,w)
II 2 (F)_ [Fl 0 (1,w) + Fp,(1,w) F11(1,w) + Fp 1 (1,w) l {l,w) - - F11 (1, w) + Fp
1 (1, w) F1 0 (l, w) + Fp,(1, w)
Torus Point: (1, -1).
Typical element in .A{l,-l):
A set of orthogonal minimal projections in the commutant with sum 1:
Change of basis used to block diagonalize .A(l,-l) with respect to these projections:
Lifted Representations for C*(pmg2) at (1, -1):
A-44
ll·

Torus Point: {z, -1) for z E T such that Im{z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(z,-1):
zFp1 (z, -1) Fp'J(z, -1) F10 (z, -1) zFq(z, -1)
A set of orthogonal minimal projections in the commutant with sum 1:
!z;
0 l [ 1
0 1 .1 2 2 -2Z'l
0 !:z; 0 1 0 2 0 ' 1-.1
2 1 0 1 2 -2Z'l 2 0 ! 0 1 .1 0 2 -2Z'l
-jz! l Change of basis used to block diagonalize A(z,- 1) with respect to these projections:
!2! 0
12_1_1 -2 .,. z" 0
Lifted Representations for C*(pmg2) at (z, -1):
Torus Point: (-1,-1).
Typical element in A(- 1,- 1):
-Fp1 (-1, -1) Fp'J( -1, -1) F1 0 ( -1, -1) -Fq(-1, -1)
A-45

A set of orthogonal minimal projections in the commutant with sum 1:
[
! -! 1 1
-2 2 0 0 0 0
0
0 1 2 -!
3!]~[~ t ~ ~-2211]· ! 0 0 ! Change of basis used to block diagonalize A(- 1,- 1) with respect to these projections:
Projection 2 is equiv to 1
Lifted Representations for C*(pmg2) at ( -1, -1):
Torus Point: (-1,w) for wET such that Im(w) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(-1,w):
-Fp1 (-1, w) Fp,(-1, w) F10(-1, w) -Fq(-1,w)
A set of orthogonal minimal projections in the commutant with sum I:
[
l 0 2 0 1
0 _:! ! 0 2
0 0 0 -!] 1 1 0 2 2 l l 0 . 2 2 0 0 ! 2
Change of basis used to block diagonalize A(-l,w) with respect to these projections:
Lifted Representations for C*(pmg2) at ( -1, w):
A-46

Torus Point: ( -1, 1).
Typical element in A(-1,1):
-Fp1 ( -1, 1) Fp,( -1, 1) F1 0 (-1, 1) -F41 ( -1, 1)
A set of orthogonal minimal projections in the commutant with sum 1:
[t t ~ 0 0 ! 0 0 !
0 0 l 0 0 ! -! .
1 1 -2 2
Change of basis used to block diagonalize A(- 1,1) with respect to these projections:
Projection 2 is equiv to 1
Lifted Representations for C*(pmg2) at ( -1, 1):
Torus Point: (z, 1) for z E T such that lm(z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(z,1):
zFp 1 (z, 1) Fp,(z, 1) F1 0 (z, 1) zF41 (z, 1)
A set of orthogonal minimal projections in the commutant with sum 1:
[ ,t 0 lz~
0 l [ 1
0 -~z~ 2 2 1 0 !:z~ 0 1 0 2
2 0 ' 1-~ 2 0 1 0 1 2z2 2 -2z, 2
0 !z~ 0 ! 0 1 ~ 0 2 2 -2z2
1-~
0 l -r.
A-47

A-48
Change of basis used to block diagonalize A(z,l) with respect to these projections:
Lifted Representations for C*(pmg2) at (z, 1):
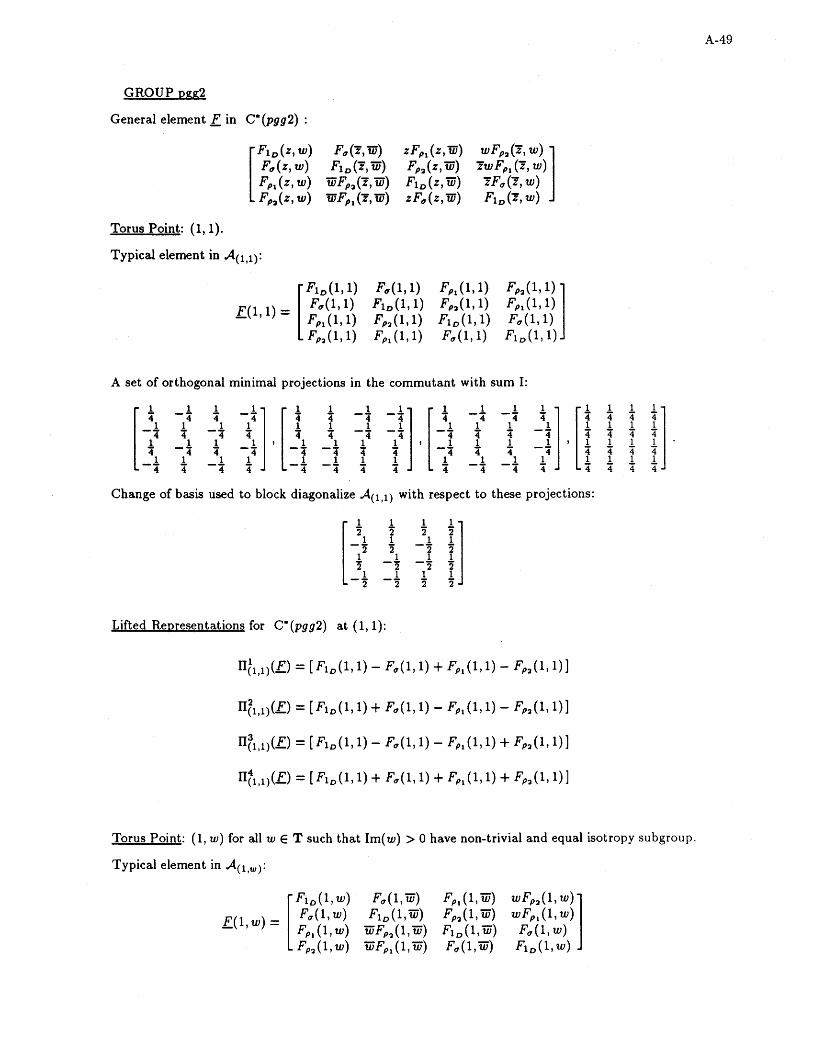
GROUP pgg2
General element F in C* (pgg2) :
Torus Point: (1, 1).
Typical element in A(t,l):
zFp1 (z, iii) Fp,(z, iii) Ft0 (z, iii) zF~(z, w)
A set of orthogonal minimal projections in the commutant with sum I:
Change of basis used to block diagonalize A(l,l) with respect to these projections:
Lifted Representations for C*(pgg2) at (1, 1):
II~t,l)(F) = [ Ft 0 (1, 1) + F~(1, 1)- Fp 1 (1, 1)- Fp,(1, 1) 1
II(1,1)(F) = ( Ft 0 (1, 1)- F~(1, 1)- Fp 1 {1, 1) + Fp,{1, 1) 1
II{t,l)(F) = [Ft 0 {1, 1) + F~{1, 1) + Fp 1 {1, 1) + Fp,{1, 1)]
!Ill·
Torus Point: {1, w) for all wET such that lm{w) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(t,w):
A-49

A set of orthogonal minimal projections in the commutant with sum I:
[it 0 0
lw! l [ l 0 0 -!rl· 2 2 1 1w; 0 0 1 -~w! 2 2 2
1-; 1 0 , 0 1-1 1 2w 2 -2w 2
0 0 ~ -~w1 0 0
Change of basis used to block diagonalize A(1,w) with respect to these projections:
[ 12! 0 121
!:t, 2
121 0 2
~21w! 0
0 12,_.1 -2 w~
Lifted Representations for c•(pgg2) at (1, w):
II1 (F)= [F1 0 (l, w) + wi Fp~(1, w) (1,w) - F17 (1, w) + w1 Fp
1 (1, w)
F 11 (1,w) + Fp 1 (1,w)wi ] F10 (l, w) + Fp~(I, w)w!
II2 (E.)_ [F1 0 (1, w)- w! Fp~(l, w) (1,w) - F17 (1,w)- w1Fp
1(1,w)
Fa(l, w)- Fp 1 (1, w)w! ] F1 0 (1, w)- Fp~(1, w)wi
Torus Point: (1, -1).
Typical element in A(1,-1):
A set of orthogonal minimal projections in the commutant with sum 1:
[
! ! 1 1 2 2 0 0 0 0
0 l [ ~ -! 0 0 l 0 0 -~ ! 0 0 1 _.!. ' 0 0 .!. 1 . 2 2 2 2
-! ! 0 0 ! ~
0
Change of basis used to block diagonalize A( 1,- 1) with respect to these projections:
Projection 2 is equiv to 1
!21 !21 !21 -!21
0 0 0 0
Lifted Representations for c•(pgg2) at (1, -1):
II1 (F)_ [Ft 0 (1,-1)- Fa(1,-1) Fp1 (1,-1)- Fp~(1,-1)] (1,-l)-- Fp1 (1,-1)+Fp~(1,-1) F1 0 (1,-l)+Fa(l,-1)
A-50

Torus Point: (z, -1) for all z E T such that Im(z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(z,-1):
zFp1 (z, -1) Fp2 (z, -1) F1 0 (z, -1) zF17(z, -1)
A set of orthogonal minimal projections in the commutant with sum I:
[ -iz! 0 -!z!
0 l [ ! 0 1z!
-!z! ~ 2
1 0 1 0 2 2 0 1 0 ' !:z! 0 1
2 2 2 -!z! 0 1 0 1z! 0 2 2
!l! ]· Change of basis used to block diagonalize A(z,- 1) with respect to these projections:
[ 12! 0 12!
0 l 2 2
0 12! 0 12! 2
!:~.; 1 1_1
0 !2izi -2~~z~ 1 1 1 0 -22~z~
Lifted Representations for C*(pgg2) at (z,-1):
Torus Point: ( -1, -1).
Typical element in A(-1,-1):
-Fp 1 (-1,-1) Fp,( -1, -1) F1 0 ( -1, -1) -F11 ( -1, -1)
A set of orthogonal minimal projections in the commutant with sum I:
[ -\ 1 1 . I] [ I 1 1 . I] [ I 1 1 .
-4 -4z -4z 4 4 41 --z - -4 41 1 1• 1 . 1 ! 1 . -!i -4~ ! -~i 4 41 41 4 4 41 4
1 . 1 . 1 1 I 1 • 1 . 1 1 I 1 • 1 . 1 41 -41 4 4 -4 1 -41 4 -4 -4 1 41 4 1 . -~i l l !• 1 . _l ~ -*i 1• 1 41 4 4 41 4' 4 41 4
I·] [ I 41 4 1 • 1
-41 4 1 I } '
4 41 1 1 . 4 -4z
1 1. 4 -4l 1 1. 4 -4l 1 . 1 4z 4 1. 1 -4l -4
A-51
ti l li 4
1 . -4
1 4

Change of basis used to block diagonalize .A(-1,- 1) with respect to these projections:
1 l 2 1 2 1 • 2'
1 • -21
Lifted Representations for C*(pgg2) at ( -1, -1):
Til-1,-1)(F) = (FtD( -1, -1) +Fa( -1, -1) + Fp 1 ( -1, -1)i- Fp:~( -1, -1)i]
IT~- 1 ,-l)(F) = ( FtD ( -1, -1)- Fq( -1, -1) + Fp 1 ( -1, -1)i + Fp:~( -1, -1)i]
ll{-t,-l)(F) = (FtD( -1, -1) + F<T( -1, -1)- Fp 1 ( -1, -1)i + Fp:~( -1, -1)i]
Torus Point: ( -1, w) for all w E T such that Im( w) > 0 have non-trivial and equal isotropy subgroup.
Typical element in .A( -l,w):
-Fp1 ( -1, w) Fp:~(-1,w) F1D( -1, w) -Fa(-1,w)
wFp:~( -1, w) ] -wFp
1 ( -1, w)
-Fq(-1, w) FtD(-l,w)
A set of orthogonal minimal projections in the commutant with sum I:
[Jw~ 0 0 -~ow!] [ ~ 0 0
tf]· 1 lw! 1 1 l 2 2 2 -2w:~
1-.1 1 0 , 0 1-.1 1 2w~ 2 -2w~ 2
0 0 1 1-1 0 0 2 2w
Change of basis used to block diagonalize .A( _1,w) with respect to these projections:
0 121
0 l 2 121 0 12.1 2 2 ~
!21w1 0 1 .1-.1 -22o~w~
0 12.1-.1 2 ~w~
Lifted Representations for C*(pgg2) at ( -1, w):
nt (£.) = [FtD(-1,w)- w1Fp~(-l,w) Fq(-1,w)- Fp 1 (-1,w)w1 l (-
1,w) Fq( -1, w) + w1 FP1 ( -1, w) F1D( -1, w) + Fp~( -1, w)w-!
n2 (F)= [ F1D( -1, w) + w1 Fp~( -1, w) F<T( -1, w) + Fp 1 ( -1, w)w-! ] (-
1,w)- Fq(-1,w)- w1Fp
1(-1,w) F1D(-1,w)- Fp~(-1,w)w1
A-52
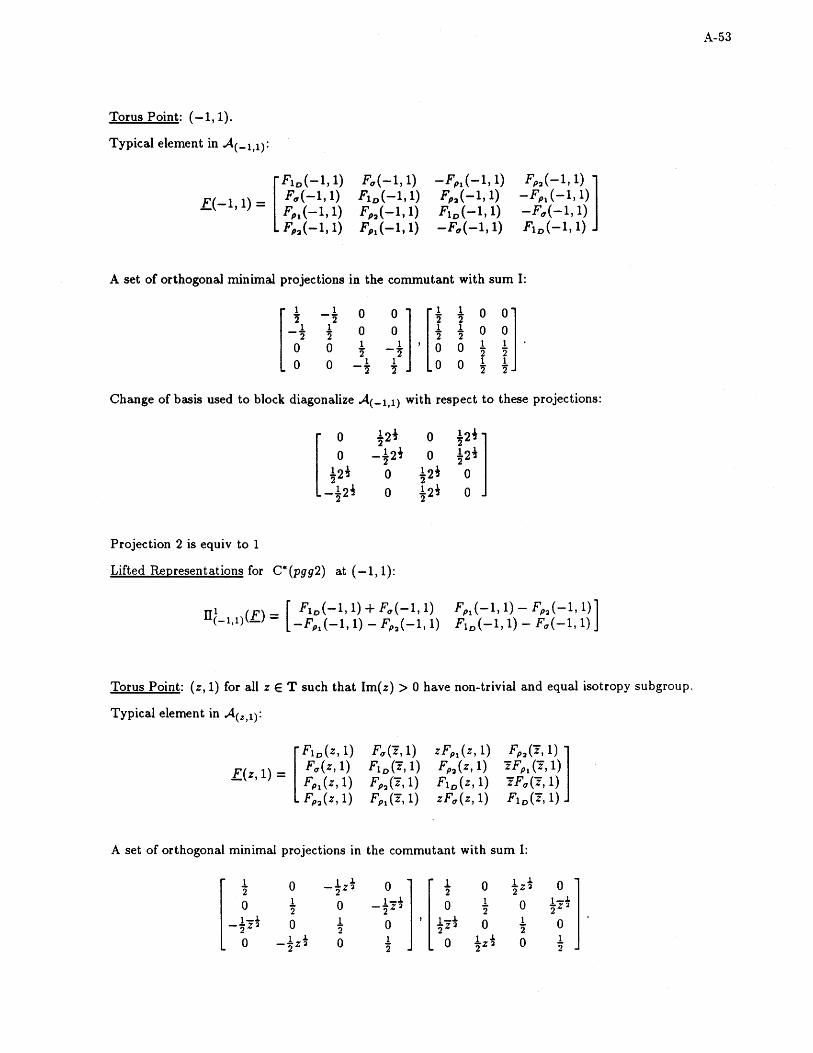
Torus Point: ( -1, 1).
Typical element in A(-1,1):
[
F1 0 (-1, 1) F17 (-1, 1) F(-1, 1)= Fa(-1,1) F10 (-1,1)
Fp1 (-1,1) Fp,(-1,1) Fp,( -1, 1) Fp1 ( -1, 1)
-Fp 1 (-1, 1) Fp,( -1, 1) F10 (-1, 1) -F17(-1, 1)
A set of orthogonal minimal projections in the commutant with sum I:
0 l [1 1 0 0] 2 2
0 0 1 l. 0 0 1 _1 ' ~ ~ 1 1 . 2 2 2 2
1 1 0 0 1 1 -2 2 2 2
0
Change of basis used to block diagonalize A(- 1,1) with respect to these projections:
12~ 2 0
-!2~ 0
0 12~ 2
0 12~ 2
Projection 2 is equiv to 1
Lifted Representations for C*(pgg2) at ( -1, 1):
rrt (F)= [ Ft 0 (-1,1)+F11 (-1,1) Fp1 (-1,1)-Fp,(-1,1)] (-1,1)- -Fp
1(-1, 1)- Fp,(-1, 1) Ft
0(-1, 1)- Fq(-1, 1)
Torus Point: (z, 1) for all z E T such that Im(z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(z,l):
[
Ft 0 (z, 1) F17 (z, 1) F(z, 1) = F17 (z, 1) F10 (z, 1) - Fp 1 (z, 1) Fp,(z, 1)
Fp,(z, 1) Fp 1 (z, 1)
zFp1 (z, 1) Fp,(z, 1) F10 (z, 1) zF17 (z, 1)
A set of orthogonal minimal projections in the commutant with sum I:
[ l
0 1 J.
_;z1] [ ~ 0 l.z~
2 -2z2 2
0 1 0 1 0 2 2 1-.l. 0 1 0 ' 1-.l. 0 1
-~z, 2 2z2 2 1 J. 0 l. 0 lz~ 0 -2Z2 2 2
I~" l 2z, 0 . 1 2
A-53

A-54
Change of basis used to block diagonalize .A(.-,l) with respect to these projections:
Lifted Representations for c•(pgg2) at (z, 1):
nt (F)= [Ft0 (z, 1)- z~Fp1 (z, 1) FtT(z, 1)- Fp,(z, 1)z; ] (z,t) - FtT(z, 1)- Fp,(z, 1)z~ Ft
0(z, 1)- z~ Fp 1 (z, 1)
n2 (F)= [Ft0 (z, 1) + z;Fp 1 (z, 1) FtT(z, 1) + Fp,(z, 1)z; ] (z,t) - FtT(z, 1) + Fp,(z, 1)z! Ft0 (z, 1) + z! Fp
1 (z, 1)

GROUP p3ml
General element F in C* (p3ml) :
F1 0 (z, w) Fe1(z, w) Fe12(z, w) Fp1 (z, w) Fp2 (z, w) Fp3 (z, w)
Fe12(w,zw) F10 (w,zw) Fe1(w,zw) Fp2(w,zw) Fp3 (w,zw) Fp 1 (w,zw)
Fe1(zw, z) Fe12(zw, z) F1 0(zw, z) Fp3 (zw,z) Fp 1 (zw,z) Fp2(zw,z)
Fp1 (z, zw) Fp2(z, zw) Fp3 (z, zw) F1 0 (z, zw) Fe1(z, zw) Fe12(z, zw)
Fp2(zw, w) Fp3 (zw, w) Fp 1 (zw, w) Fe12(zw, w) F10(zw, w) Fe1(zw, w)
Fp3 (w, z) Fp 1 (w, z) Fp2 (w, z) Fe1(w, z) Fe12(w, z) F1 0 (w,z)
Torus Point: (w2 ,w) for all wET such that Im(w) > 0 and Re(w) >-!all have non-trivial and
equal isotropy subgroup.
Typical element in A(w2,w):
F(w2, w) =
F1 0 (w2 , w) Fe1(w2, w) Fe1'J(w2, w) FP• (w2' w) Fp2 (w2 ,w) Fp3 (w2 , w)
Fe12(w,w) F1 0 (w, w) Fe1(w,w) Fp2 (w, w) Fp3 (w, w) Fp1 (w,w)
Fe1(w, w2) Fe12(w, w2) Ft 0 (w,w2 )
Fp3 (w, w2 )
Fp1 (w, w2)
Fp2 (w, w2)
Fp1(w2 ,w)
Fp'J(w 2 , w) Fp 3 (w2 , w) F1 0 (w2
, w) Fe1( w2 , w) Fe12(w2, w)
FP'J(w, w) Fp3 (w, w) Fp 1 (w,w) FC1'J(w,w) F10 (w,w) Fe1(w, w)
A set of orthogonal minimal projections in the commutant with sum I:
1 0 0 1 0 0 2 -2 0 1 0 0 1 0 2 -2 0 0 1 0 0 1
2 -2 1 0 0 1 0 0 -2 2
0 1 0 0 1 0 -2 2 0 0 1 0 0 1
-2 2
1 0 0 1 0 0 2 2 0 1 0 0 1 0 2 2 0 0 1 0 0 1
2 2 1 0 0 1 0 0 2 2 0 1 0 0 1 0 2 2 0 0 1 0 0 1 2 2
Fp 3 (w, w2)
Fp 1 (w,w2)
Fp'J(w, w2)
FC1(w, w2)
Fe1'J(w,w2)
Ft 0 (w, w2)
Change of basis used to block diagonalize A(w'l,w) with respect to these projections:
0 0 121 2
0 121 2 0
121 2 0 0 121
2 0 0
0 121 2 0 0 0 121
2
0 0 1 .1 0 121 0 -22'J 2 1 .1 0 0 121 0 0 -22'J 2
0 1 ..\. 0 0 0 12~ -22'J 2
Lifted Representations for C*(p3ml) at (w2 , w):
[
F1o(w, w)- Fp3(w, w) FC1'J(W, w2)- FP1 (w, w2) FC1(w2' w)- Fp2(w 2
' w) ] ITtw2,w)(F) = Fe1(w, w)- Fp1 (w, w) F1 0 (w, w2)- Fp2(w, w2) Fe1'J(w2, w)- Fp3(w 2
, w) Fe1'J(w, w)- Fp2 (w, w) Fe1(w, w2)- Fp3(w, w2 ) F1 0 (w2
, w)- Fp 1 (w2, w)
A-55
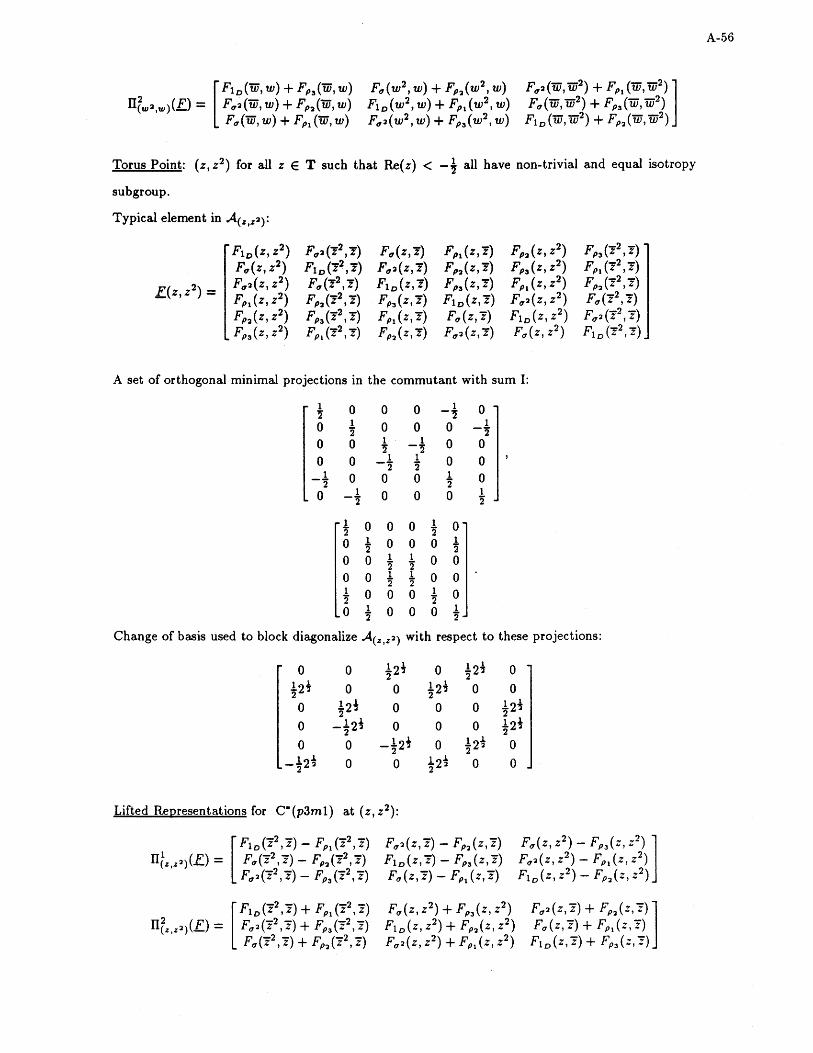
Torus Point: (z, z2) for all z E T such that Re(z) < -j all have non-trivial and equal isotropy
subgroup.
Typical element in A(z,z2):
F10 (z, z2 )
Fe1(z, z2)
Fe12(z, z2)
Fp 1 (z, z2)
Fp,(z,z2 )
Fp 3 (z,z2 )
FC1,('z2, z) F1 0 (z2 , z) Fe1(z2 , z) Fp,(z2
, z) Fp3 (z2
, z) FPl (z2' z)
Fe1(z, z) Fe12(z, z) F1 0 (z, z) Fp3 (z, z) Fp 1 (z,z) Fp,(z, z)
Fp1 (z, z) Fp,(z, z) Fp3 (z, z) F1 0 (z, z) Fu(z, z) Fu,(z,z)
Fp,(z, z2)
Fp3 (z,z 2)
Fp 1 (z, z2)
Fu,(z, z2)
Ft 0 (z, z2 )
Fu(z,z 2)
A set of orthogonal minimal projections in the commutant with sum I:
1 0 0 0 1 0 2 -2 0 1 0 0 0 1
2 -2 0 0 1 1 0 0 2 -2 0 0 1 1 0 0 -2 2
1 0 0 0 1 0 -2 2 0 1 0 0 0 1
-2 2
1 0 0 0 1 0 2 2 0 ! 0 0 0 1
2
0 0 1 1 0 0 2 2 0 0 1 1 0 0 2 2 1 0 0 0 1 0 2 2 0 1 0 0 0 1
2 2
Fp3 (z2 , z) Fp 1 (z
2, z)
Fp,(z2 ,z) Fu(z2
, z) Fu2 (z2 , z) Ft 0 (z2 , z)
Change of basis used to block diagonalize A(z,z2) with respect to these projections:
0 0 12~ 2 0 121 2 ., 0
12~ 2 0 0 12~
2 0 0
0 12! 2 0 0 0 12!
2
0 -!2! 0 0 0 12! 2
0 0 1 .1. 0 121 0 -222 2 1 .1. 0 0 121 0 0 -22:a 2
Lifted Representations for C*(p3ml) at (z, z2):
A-56
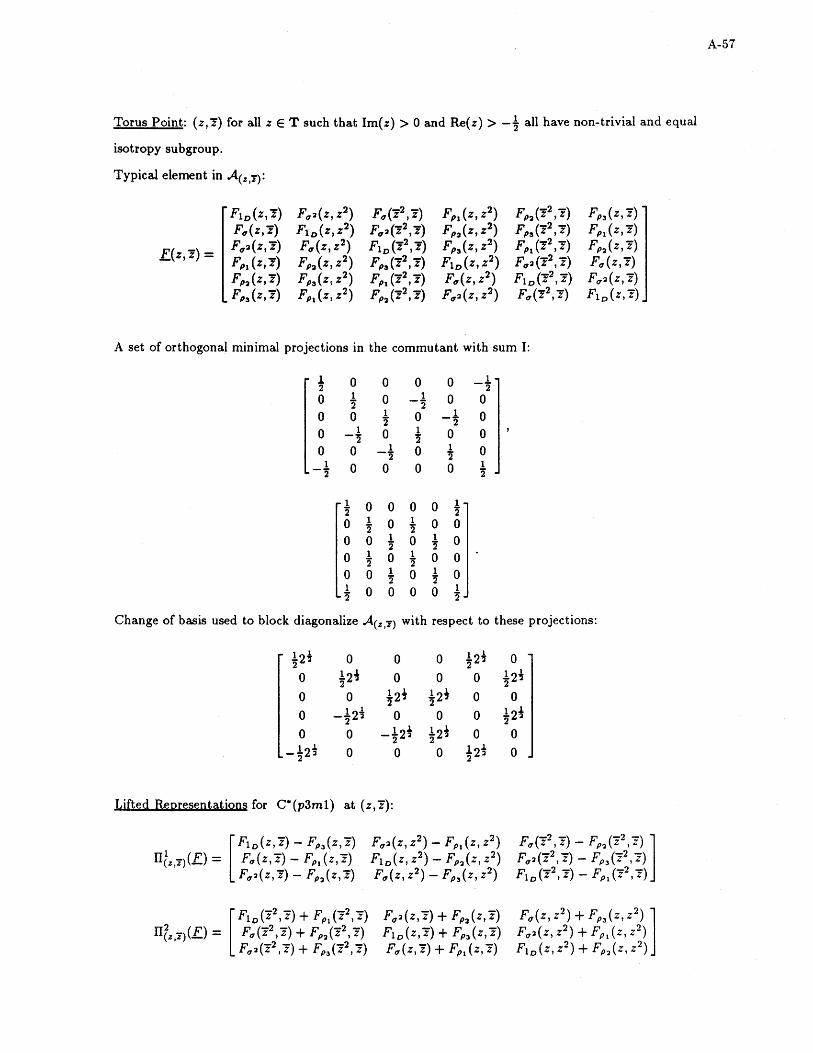
Torus Point: (z,z) for all z E T such that Im(z) > 0 and Re(z) >-tall have non-trivial and equal
isotropy subgroup.
Typical element in .A(z,zr
F(z,z) =
F1 0 (z, z) F(l(z,z) F(12(z, z) Fp 1 (z, z) Fp2 (z, z) Fp3 (z, z)
F(12(z, z2)
Ft 0 (z, z2)
F(l(z, z2)
Fp2 (z, z2 )
Fp3 (z, z2 )
Fp1 (z, z2 )
F(1(z2, z)
F(12(z2 ,z} FtD(:z2,-z) Fp3 (z2 , z) Fp1 (-z2, z) Fp2(-z2, z)
FPt (z, z2) Fp2 (z, z2)
Fp3 (z, z2)
F1 0 (z, z2 )
F(l(z, z2 )
F(12(z, z2)
Fp2(-z2 ,z) Fp3 (z2,z) Fp1 (-z2 ,z} F(12(z2 , z) F1 0 (z2
, z) F(1(z2, z)
A set of orthogonal minimal projections in the commutant with sum I:
1 0 0 0 0 1 2 -2 0 1 0 1 0 0 2 -2 0 0 1 0 1 0 2 -2 0 1 0 1 0 0 -2 2 0 0 1 0 1 0 -2 2 1 0 0 0 0 1
-2 2
1 0 0 0 0 1 2 2 0 1 0 1 0 0 2 2 0 0 ! 0 1 0 2 2 0 1 0 1 0 0 2 2 0 0 1 0 1 0 2 2 1 0 0 0 0 1 2 2
Fp3 (z, z) Fp1 (z, z) Fp2 (z, z) F(l(z, z) F(12(z, z) F1 0 (z, z)
Change of basis used to block diagonalize .A(z,T) with respect to these projections:
121 2 ., 0 0 0 121 2 ., 0
0 12-! 2
0 0 0 121 2 .,
0 0 12-! 12-! 0 0 2 2
0 1 1 0 0 0 121 -22~ 2
0 0 1 .1 !21 0 0 -222 2 1 .1 0 0 0 12~ 0 -222 2
Lifted Representations for C*(p3ml) at (z, z):
A-57

A-58
Torus Point: ( -eiri, e-jri).
Typical element in .A( -ei ri ,e-f .. i):
F1o Fq, Fq Fpl Fp, FP3 Fq F1o Fq, Fp, FP3 Fpl
F( -eiri' e-jri) = Fq, Fq F1o FP3 FPl Fp, ( -eiri, e-jri) FPl Fp, Fps F1o F(l, F(l Fp, FP3 FPl F(l F1o Fq, FP3 FPl Fp, F(l, F(l Fto
A set of orthogonal minimal projections in the commutant with sum I: 1 1 1 1 1 1 3 -6 -6 6 -3 6
1 1 1 1 1 1 -6 3 -6 6 6 -3
1 1 1 1 1 1 -6 -6 3 -3 6 6
1 1 1 1 1 1 6 6 -3 3 -6 -6
1 1 1 1 1 1 -3 6 6 -6 3 -6
1 1 1 1 1 1 6 -3 6 -6 -6 3 1
i 1 1 1 1
6 6 -6 -6 -6 1 1 1 1 1 1 6 6 6 -6 -6 -6 1 1 1 1 1 1 6 6 6 -6 -6 -6
1 1 1 1 1 1 -6 -6 -6 6 6 6
1 1 1 1 1 1 -6 -6 -6 6 6 6
1 1 1 1 1 1 -6 -6 -6 6 6 6
1 1 1 1 1 1 6 6 6 6 6 6 1 1 1 1 1 1 6 6 6 6 6 6 1 1 1 1 1 1 6 6 6 6 6 6 1 1 1 1 1 1 6 6 6 6 6 6 1 1 1 1 1 1 6 6 6 6 6 6 1 1 1 1 1 1 6 6 6 6 6 6
1 1 1 1 1 1 3 -6 -6 -6 3 -6 1 1 1 1 1 1
-6 3 -6 -6 -6 3 1 1 1 1 1 1
-6 -6 3 3 -6 -6 1 1 1 1 1 1
-6 -6 3 3 -6 -6 1 1 1 1 1 1 3 -6 -6 -6 3 -6
_1 1 _1 _1 _1 1 6 3 6 6 6 3
Change of basis used to block diagonalize .A ~ .. , _1 .. ,) with respect to these projections: (-e ,e
0 131 3
161 6
161 6 0 131
3 1 -i31 161 161 1 -i31 2 6 6 2
1 -i31 16J. 16J. 1 -i31 -2 6 l 6 l -2 1 13J. 1 J. 16J. 1 -i31 2 6 l -66, 6 l -2 0 -k31 -t61 161
6 0 131 3
1 131 -i61 161 1 -i31 -2 6 6 2
Projection 4 is equiv to 1

Lifted Representations for C*(p3ml) at ( -et"i, e-jri):
ll1 (F)= (-ei•i,e-j•i) -
[Flo- !FO'~ + Fp~- !Fp1 - !FO'- !Fp3 !F0'~3! - !F0'3! + iFp1 31 - !Fp3 3!
na . . (F) =F (-et"i e-jri) + F (-et"i e-jri) + F (-et"i e-jri) ( -e1•• ,e-1••) - 10 ' 0':1 ' 0' '
+ Fp1 ( -e*"i, e-jri) + Fp~( -e*"i, e-iri) + Fp3 ( -ei"i, e-i"i)
. 2 . ~ . Torus Pomt: ( e- 3 "', -e 3"
1 ).
Typical element in .A(e-1•i,-e1ri):
Flo FO'~ FO' FP1 Fp~ FP3 FO' F1 0 FO'~ Fp~ FP3 FPt
F(e-i"i, -e'i"i) = FO'~ FO' Flo FP3 FPt Fp~ ( e-ill'i, -e'i"i) FPt Fp~ FP3 Flo FO'~ FO' FP:I FP3 FPt FO' Flo FO':~
FP3 FP1 Fp~ FO'~ FO' Flo
A set of orthogonal minimal projections in the commutant with sum 1:
1 1 1 1 1 1 1 1 1 1 1 1 3 -6 -6 6 -3 6 3 -6 -6 -6 3 -6
-t 1 1 1 1 1 1 1 1 1 1 1 3 -6 6 6 -3 -6 3 -6 -6 -6 3
1 1 1 1 1 1 1 1 1 1 1 1 -6 -6 3 -3 6 6 -6 -6 3 3 -6 -6
1 1 1 1 1 1 1 1 1 1 1 1 6 6 -! ! -6 -6 -6 -6 ! ! -6 -6 1 1 1 1 1 1 1 1 1 1 1 1
-3 6 6 -6 3 -6 3 -6 -6 -6 3 -6 1 1 1 1 1 1 1 1 1 1 1 1 6 -3 6 -6 -6 ! -6 3 -6 -6 -6 3
1 1 1 1 1 1 1 1 1 1 1 1 6 6 6 6 6 6 6 6 6 -6 -6 -6 l l l l l 1 l ! 1 _l _1 -i 6 6 6 6 6 6 6 6 6 6 6 1 1 1 1 1 1 1 1 1 1 1 1 6 6 6 6 6 6 6 6 6 -6 -6 -6 1 1 1 1 ! 1 ' -i _1 -t l 1 1 6 6 6 6 6 6 6 6 6 6 1 1 1 1 1 1 1 1 1 1 1 1 6 6 6 6 6 6 -6 -6 -6 6 6 6 1 l l l 1 l _l _l _l l l l 6 6 6 6 6 6 6 6 6 6 6 6
Change of basis used to block diagonalize .A _1 .. i ! ri with respect to these projections: (e ,-e )
0 131 3 0 13~ 3 'J 161
6 161 6
1 1 ~ 1 1 ~ 161 161 2 -63:~ 2 -63:~ 6 6 1 1 ~ 1 1 ~ 161 161 -2 -63:~ -2 -63:~ 6 6
1 131 -! 1 ~ 16~ -t61 2 6 -63:~ 6 'J
0 13~' -3 'J 0 13~ 3 'J 16~ 6 'J -i61
-! 131 l -i31 16~ -t61 6 2 6 'J
A-59

Projection 2 is equivalent to 1
Lifted Representations for C*(p3m1) at (e-fri, -e!"'i):
Torus Point: (1, 1).
Typical element in A(1,1):
F10 (1,1) F17 (1, 1)
F( ) F17~(1, 1)
-1,1 = FPt(1,1) Fp~(1, 1) Fp3 (1, 1)
F17~(1, 1) F1 0 (1,1) F17 (1,1) Fp~(1, 1) Fp3 (1, 1) Fp1 (1, 1)
F 17 (1, 1) F17 ~(1, 1) F1 0 (1, 1) Fp3 (1,1) Fp1 (1,1) Fp~ (1, 1)
Fp 1 (1, 1) Fp~(1, 1) Fp3 (1,1) F1 0 (1,1) F17 (1,1) F17~(1,1)
Fp~(1, 1) Fp3 (1, 1) Fp1 {1, 1) F17 ~(1,1) F1 0 (l,1) F17 (1,1)
A set of orthogonal minimal projections in the commutant with sum I: 1 1 6 6 1 1 6 6 1 1 6 6
1 1 -6 -6
1 1 -6 -6
-i -l
1 1 6 -6 1 1 6 -6 1 1 6 -6
1 1 -6 6
1 1 -6 6
1 1 -6 6
1 1 -6 -6
1 1 -6 -6
1 1 -6 -6
1 1 6 6 1 1 6 6 1 1 6 6
1 1 6 6 1 1 6 6 1 1 6 6 1 1 6 6 1 1 6 6 1 1 6 6
1 1 6 6 1 1 6 6 1 1 6 6 1 1 6 6 1 1 6 6 1 1 6 6
1 1 6 6 1 1 6 6 1 1 6 6 1 1 6 6 1 1 6 6 1 1 6 6
Fp3 {1, 1) Fp1 (1, 1) Fp~(1, 1) F17 (1,1) F17 ~(1, 1) F1 0 (1, 1)
1 1 1 1 1 1 1 1 1 1 1 1 3 -6 -6 -3 6 6 3 -6 -6 3 -6 -6
1 1 1 1 1 1 1 1 1 1 1 1 -6 3 -6 6 -3 6 -6 3 -6 -6 3 -6 -t -t i t t -i -t -t i -t -t i
1 1 1 1 _.l 1 1 1 1 1 1 1 -3 6 6 3 6 -6 3 -6 -6 3 -6 -6 t -i t -t i -t -t i -t -t i -t .l .l _.l _l _.l l _.l _.l .l _l _.l 1 6 6 3 6 6 3 6 6 3 6 6 3
Change of basis used to block diagonalize A( 1 ,1) with respect to these projections:
0 1 2
1 -2 0
-! 1 2
0 1 2
1 -2 0 1 2
-!
A-60

Projection 4 is equivalent to 3
Lifted Representations for C*(p3m1) at (1, 1):
ll~1 ,1)(F) = [Ft 0 (1, 1) + F(72(1, 1) + F(7(1, 1) + Fp1 (1, 1) + Fp,(1, 1) + Fp3 (1, 1)]
ll(t,l)(F) =
tF173; - tF17,3i - tFp,3i + tFp3 3i l (1 1) F1 0 - !F17 :z - !F17 - Fp1 + !Fp:z + !Fp 3 '
A-61
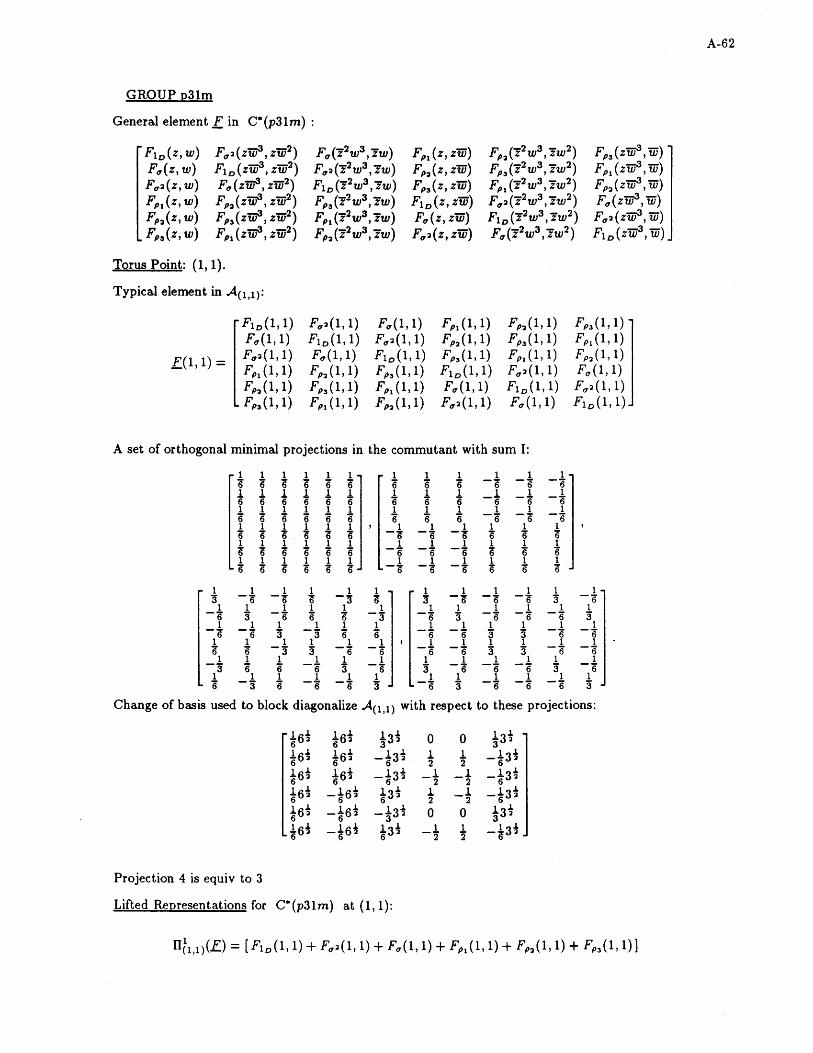
A-62
GROUP p31m
General element Fin C*(p31m) :
F1 0 (z, w) Fa2(z~,zw2) Fa(z2w3 ,zw) FPl (z, zw) F (z2w3 zw2 ) Fp3 (zw3 ,w) P2 ' Fa(z, w) F1 0 (z~, zw2
) Fa:~(z2w3 ,zw) Fp2(z, zw) F (z2w3 zw2 ) Fp 1 (z~,w) P3 '
Fa:~(z, w) Fa(z~,zw2) F1 0 ('Z2w3, zw) Fp3 (z, zw) F (z2w3 zw2) Fp2 (z~,w) Pt '
Fp1 (z, w) Fp2 (z"iiP, zw2) F (-2 3- ) F1 0 (z, zw) Fa2(z2w3, zw2) Fa(z~,w) p3 Z W , ZW
Fp2 (z, w) Fp3 ( z"iiP, zw2) F (-2 3- ) Fa(z, zw) F1o(z2w3' zw2) Fa2(z~,w) Pt Z W , ZW
Fp3 (z, w) Fp1 ( z"iiP, zw2) F (-2 3- ) Fa2(z,zw) Fa(z2w3
, zw2) F1 0 (zw3
, w) p2 Z W , ZW
Torus Point: (1, 1).
Typical element in .A(1,1):
F1 0 (1,1) Fa2(1, 1) Fa(1, 1) Fp1 (1,1) Fp2(1, 1) Fp3 (1,1) Fa(1, 1) F1 0 (1, 1) Fa2(1,1) Fp2(1, 1) Fp3 (1, 1) Fp1 (1,1)
F(1, 1) = Fa:~(1, 1) Fa(1,1) F10 (1,1) Fp3 (1, 1) Fp 1 (1, 1) Fp2(1, 1) FP1 (1, 1) FP2 (1, 1) Fp3 (1, 1) F1 0 (1,1) Fa2(1, 1) Fa(1,1) Fp2(1, 1) Fp3 (1,1) Fp1 (1,1) Fa(1,1) F1 0 (1, 1) Fa:~ (1, 1) Fp3 (1, 1) Fp1 (1, 1) Fp2 (1, 1) Fa2(1, 1) Fa(1,1) F1 0 (1, 1)
A set of orthogonal minimal projections in the commutant with sum 1:
1 1 1 1 1 1 1 1 1 1 1 1 6 6 6 6 6 6 6 6 6 -6 -6 -6 1 1 1 1 1 1 1 1 1 1 1 1 6 6 6 6 6 6 6 6 6 -6 -6 -6 1 1 1 1 1 1 1 1 1 1 1 1 6 6 6 6 6 6 6 6 6 -6 -6 -6 1 1 1 1 1 1 1 1 1 1 1 1 6 6 6 6 6 6 -6 -6 -6 6 6 6 1 1 1 1 1 1 1 1 1 1 1 1 6 6 6 6 6 6 -6 -6 -6 6 6 6 1 1 1 1 1 1 1 1 1 1 1 1 6 6 6 6 6 6 -6 -6 -6 6 6 6
1 1 1 1 1 1 1 1 1 1 1 1 3 -6 -6 6 -3 6 3 -6 -6 -6 3 -6 1 1 1 1 1 1 1 1 1 1 1 1
-6 3 -6 6 6 -3 -6 3 -6 -6 -6 3 1 1 1 1 1 1 1 1 1 1 1 1
-6 -6 3 -3 6 6 -6 -6 3 3 -6 -6 1 1 1 1 1 1 1 1 1 1 1 1 6 6 -3 3 -6 -6 -6 -6 3 3 -6 -6
1 1 1 1 1 1 1 1 1 1 1 1 -3 6 6 -6 3 -6 3 -6 -6 -6 3 -6
1 1 1 1 1 1 1 1 1 1 1 1 6 -3 6 -6 -6 3 -6 3 -6 -6 -6 3
Change of basis used to block diagonalize .A(1,1) with respect to these projections:
161 6
161 6
1a! 3 0 0 1a! 3 161 161 1 .L 1 1 1 .L 6 6 -632 2 2 -632 16.\. 16.\. -i-31 _l -! -i-31 6 2 6 2 2 16.\. -!61 1a.L 1 -! 1 .L 6 2 6 2 2 -632 16.\. 6 2 -i-61 -sa! 0 0 1a.L 3 2
161 -!61 131 1 1 -!31 6 6 -2 2
Projection 4 is equiv to 3
Lifted Representations for C*(p31m) at (1, 1 ):

A-63
lll1,1)(F) = [ F1 0 (1, 1) + F(1~(1, 1) + F(1(1, 1)- Fp1 {1, 1)- Fp~(1, 1)- Fp3 (1, 1)]
II3 (F)_ [Flo- ~Fq~- ~Fq + ~Fp1 - Fp~ + ~Fp3 ~F(1~3-i - ~F(13; + ~Fp1 3;- ~Fp3 3; l (1 1) (l,l) - - ~Fq31 - ~F(1~3; - ~Fp3 3; + ~Fp1 3; F10 - ~Fq~ + Fp~ - ~Fp1 - ~Fq - ~Fp3 '
Torus Point: (z, 1) for all z E T such that z #;. 1 all have non-trivial and equal isotropy subgroup.
Typical element in A(z,l):
F1 0 (z, 1) Fq2(z, z) Fq(z2 , z) Fp1 (z, z) Fp,(z2,z) Fp3 (z, 1) F(1(z,1) F10 (z, z) Fq2(z2 ,z) Fp2(z, z) Fp3(z2,z) Fp 1 (z, 1)
F(z, 1) = Fq2(Z, 1) Fq(z, z) F10 (z2 ,z) Fp3(z, z) Fp1 (z2, z) Fp,(z, 1) Fp1 (z, 1) Fp,(z, z) Fp3 (z2 , z) F10 (z, z) F(1~(z2 , z) F(1(z,1) Fp,(z, 1) Fp3 (z, z) Fp. (:z2, z) Fq(z,z) F10 (z2, z) Fq2(z,1) Fp3 (z, 1) Fp 1 (z, z) Fp,(z2 , z) Fq2(z, z) F(1(z2 , z) F10 (z, 1)
A set of orthogonal minimal projections in the commutant with sum I: 1 0 0 0 0 1 1 0 0 0 0 1 2 -2 2 2 0 1 0 -~ 0 0 0 1 0 1 0 0 2 2 2 0 0 1 0 1 0 0 0 1 0 1 0 2 -2 2 2 0 1 0 1 0 0
, 0 1 0 1 0 0 -2 2 2 2
0 0 1 0 1 0 0 0 1 0 1 0 -2 2 2 2 1 0 0 0 0 1 1 0 0 0 0 1 -2 2 2 2
Change of basis used to block diagonalize A(z,1) with respect to these projections:
0 121 2 ., 0 121 2 ., 0 0
0 0 121 2 0 121 2 ., 0
121 2 0 0 0 0 121
2
0 0 1 1
0 121 0 -22~ 2
-~2~ 0 0 0 0 1 2J. 2 ~
0 -~21 0 121 2 0 0
Lifted Re12resentations for C*(p31m) at (z, 1):
[
F1 0 (z2, z)- Fp 1 (z2
, z) Fq~(z, 1)- Fp2(z, 1) Fq(z, z)- Fp3 (z, z) ] n[z,1)(F) = Fq(z2 , z) - Fp~(z2 , z) F1 0(z, 1)- Fp3(z, 1) Fq2( z, z) - Fp 1 (z, z)
Fq2(z2 , z)- Fp3(z2 , z) Fq(z, 1)- Fp1 (z, 1) F1 0 (z, z)- Fp,(z, z)
[
F10 (z, 1) + Fp3 (z, 1) F(1~(z, z) + Fp 1 (z, z) F(1(z2, z) + Fp,(z2
, z) ] nlz,1)(F) = Fq(Z, 1) + FPl (z, 1) F1o(z, z) + Fp,(z, z) Fq':l(z2
, z) + FP3 (z2' z)
Fq2(z, 1) + Fp,(z, 1) Fq(z, z) + Fp 3 (z, z) F1 0 ('z2 ,z) + Fp 1 (z2
, z)
Torus Point: (1, e-j1ri).
Typical element F(1,e-1""i) in A(l,e-i•i):
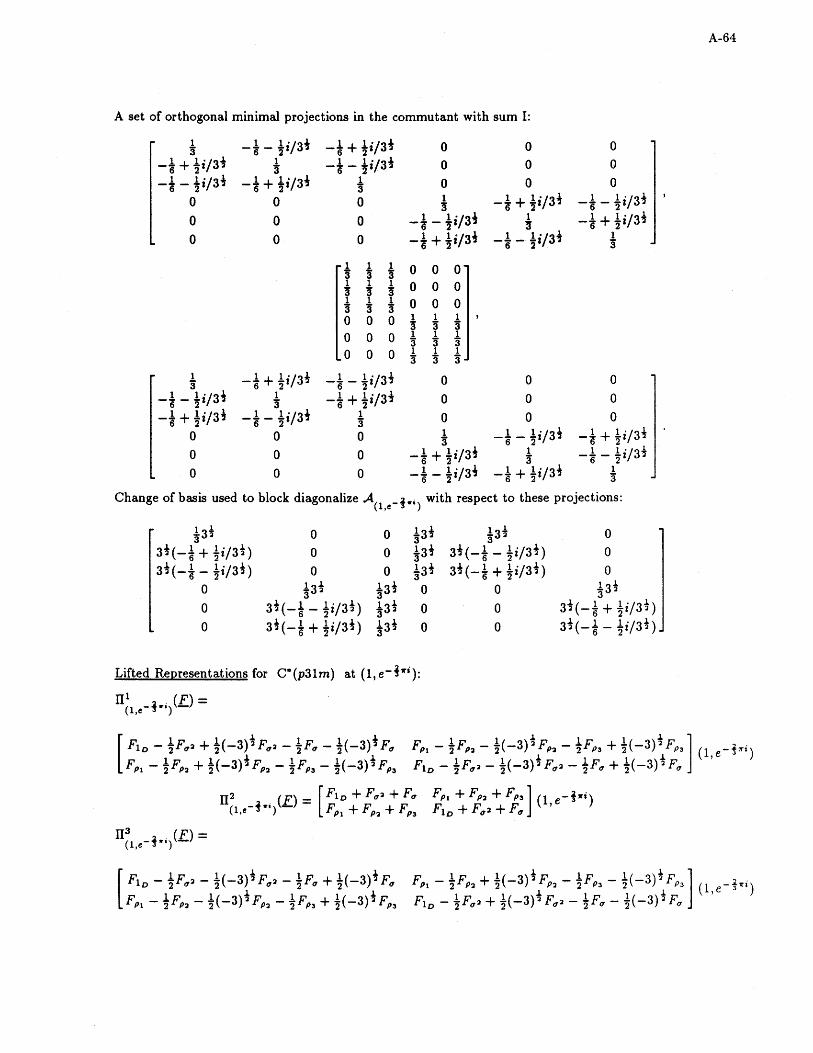
A set of orthogonal minimal projections in the commutant with sum 1:
1 -i- tifa1 -i + tifa1 0 0 0 3 -i + tiJa1 i -!- tiJa1 0 0 0
-!- tiJa' -i + tiJa' 1 0 0 0 3 0 0 0 1 -i + tiJa' -i- ji/3; ! 0 0 0 -i- ji/3; 1 -i + ji/3; 3 0 0 0 -i + !i/3; -i- !i/3; 1
3
1 1 1 0 0 0 3 3 3 1 1 1 0 0 0 3 3 3 1 1 i 0 0 0 3 3 0 0 0 1 1 1
3 3 3 0 0 0 1 1 1
3 3 3 0 0 0 1 1 1
3 3 3 1 -i + !ifa' 1 1 "ja 1 0 0 0 3 -6- 2 1 .,
1 1 ·;a 1 1 -i + jiJa' 0 0 0 -6- 2 1 ., 3 -i + !i/3; -i- !i/3; 1 0 0 0 3
0 0 0 1 -i- !iJa' 1 1 "/3 1 3 -6 + 2 1 .,
0 0 0 -! + !i/3! 1 1 1 '/31 3 -6- 2 1 .,
0 0 0 -!- !iJa' 1 1 '/3 1 1 -6 + 21 ., 3
Change of basis used to block diagonalize A( -i•• with respect to these projections: 1,e )
!a! 3 0 0 13i
3
a1( -! + !i/31) 0 0 !a! 3
a!(-t- !i/31) 0 0 !a! 3
0 131 3
131 3 0
0 31( -!- !i/3!) 131 3 0
0 a1(-t + !i/31) !a! 3 0
Lifted Representations for C*(p31m) at (1, e-i"'i):
TI 1 (F)-(1,e-i•') - -
[ F1 0 - !Fql- ~( -3)1 Fql- !Fq + ~( -3)1 Fq
FPl- !FPl- !(-a)1FPl- !FP3 + !(-a)!FP3
13l 3 :l 0
a1(-t- !iJa1) 0 .1( 1 1"/3.1) al -6 + 2' l 0
0 13.1 3 l 0 31(-t + !i/31) 0 .1( 1 1 '/3.1) 3l -6- 21 ~
A-64
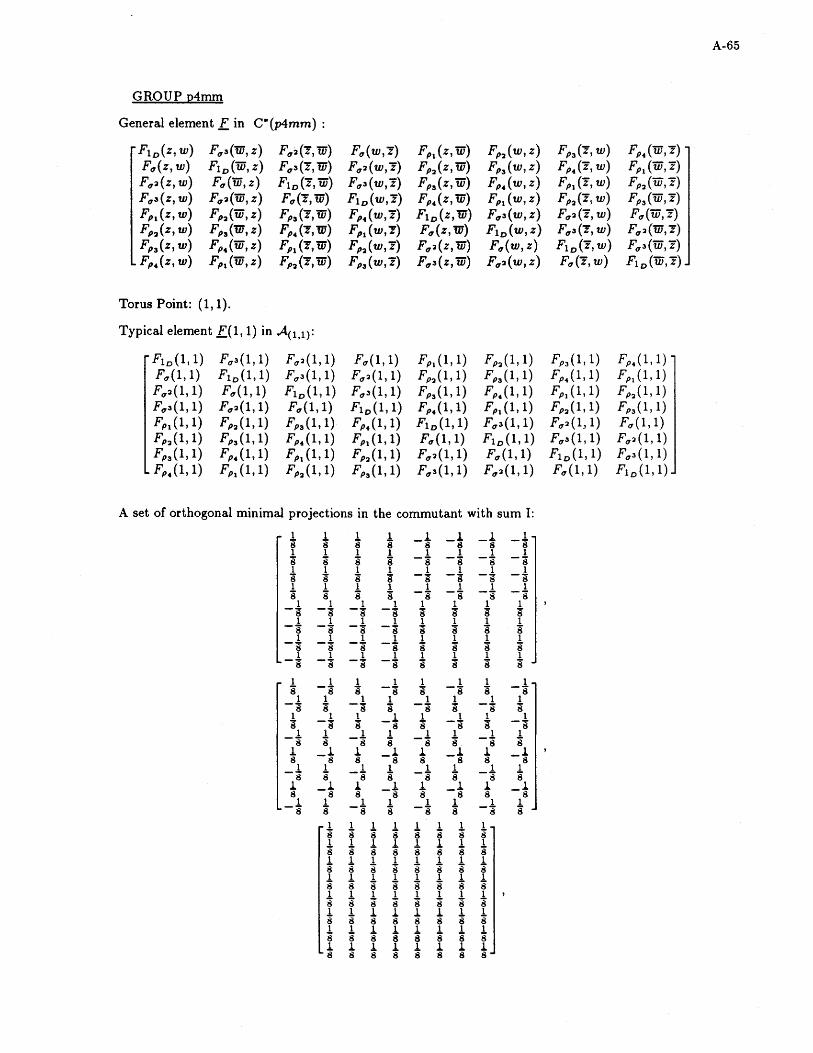
A-65
GROUP J24mm
General element Fin C*(p4mm):
F1D(z, w) F(7:s(w, z) F(7:a(z, w) F(7(w,z) Fp1 (z, w) Fpl(w, z) Fp3 (z, w) Fp,.(w,z) F(7(z, w) F1D(w, z) F(7:s(z, w) F(7l(w, z) Fpl(z, w) Fp3 (w, z) Fp,.(z, w) Fp 1 (w,z) Ft7l(z, w) F(7(w, z) F1D(z,w) F(7:s(w, z) Fp3 (z, w) Fp .. (w, z) Fp 1 (z, w) Fpl(w,z)· F(7:s(z, w) F(7l(w, z) F(7(z, w) F1D(w,z) Fp .. (z, w) Fp1 (w, z) Fpl(z, w) Fp3 (w, z) Fp 1 (z, w) Fpl(w,z) Fp3 (z, w) Fp .. (w,z) F1D(z, w) Ft7:s(w, z) F(7l(z, w) F(7(w, z) Fpl(z, w) Fp3 (w, z) Fp .. (z, lli) Fp1 (w, z) F(7(z, w) F1D(w,z) F(7:s(z, w) Ft7'l(w, z) Fp3 (z, w) Fp .. (w,z) Fp1 (z,w) Fpl(w,z) F(7'J(z, w) Ft7(w, z) F1D(z,w) F(7:s(w, z) Fp4 (z, w) Fp1 (w,z) Fpl(z,w) Fp3 (w,z) F(7:s(z, w) Ft7l(w, z) F(7(z, w) F1D(w, z)
Torus Point: (1, 1).
Typical element F(1, 1) in A(1,1):
F1D(1,1) Ft7:s(1, 1) Ft7'l(1, 1) F(7(1, 1) Fp1 (1,1) FP'l(1, 1) Fp3 (1, 1) Fp .. (1, 1) F(7(1, 1) F1D(1, 1) Ft7:s(1, 1) Ft7'l(1, 1) FPl(1, 1) Fp3 (1, 1) Fp4 (1, 1) FPl (1, 1) Ft7'l(1,1) F(7(1, 1) F1D(1, 1) Ft7:s(1, 1) Fp3 (1, 1) Fp .. (1,1) Fp
1 (1, 1) Fp'J( 1, 1)
Ft7:s(1, 1) Ft7l(1, 1) Ft7{1, 1) F1D{1, 1) Fp4 {1, 1) FPl (1, 1) Fpl(1, 1) Fp3 {1, 1) Fp1 (1, 1) Fpl(1, 1) Fp3 (1,1) Fp4 (1,1) F1D(1, 1) Ft7:s(1, 1) Ft7'l{1,1) F(7(1, 1) Fpl(1, 1) Fp3 (1,1) Fp4 (1,1) Fp1 (1,1) Ft7(1,1) F1D(1, 1) Ft7:s(1, 1) Ft7'l(1,1) Fp3 (1, 1) Fp4 (1,1) Fp1 (1,1) Fpl(1, 1) Ft7l(1, 1) Ft7(1,1) F1D(1, 1) Ft7:s(1, 1) Fp4 (1,1) Fp1 (1,1) Fpl(1, 1) Fp3 (1, 1) Ft7:s(1, 1) Ft7'l(1,1) Ft7(1,1) F1D(1, 1)
A set of orthogonal minimal projections in the commutant with sum I:
1 l 1 1 1 1 1 1 8 s 8 8 -8 -8 -8 -8 1 1 1 1 1 1 1 1 8 8 8 8 -8 -8 -8 -8 1 1 1 1 1 1 1 1 8 8 8 8 -8 -8 -8 -8 1 1 1 1 1 1 1 1 8 8 8 8 -8 -8 -8 -8
1 1 1 1 1 1 1 1 -8 -8 -8 -8 8 8 8 8
1 1 1 1 1 1 1 1 -8 -8 -8 -8 8 8 8 8
1 1 1 1 1 1 1 1 -8 -8 -8 -8 8 8 8 8
1 1 1 1 1 1 1 1 -8 -8 -8 -8 8 8 8 8
1 1 1 1 1 1 1 1 8 -8 8 -8 8 -8 8 -8
1 1 1 1 1 1 1 1 -8 8 -8 8 -8 8 -8 8
1 1 1 1 1 1 1 1 8 -8 8 -8 8 -8 8 -8
1 1 1 1 1 1 1 1 -8 8 -8 8 -8 8 -8 8 l _1 l -i l -t 1 1 s s s s s -8 1 1 1 1 1 1 1 1 -8 8 -8 8 -8 8 -8 8
1 _l l _l 1 _l 1 -t 8 8 s 8 8 8 8 1 1 1 1 -i 1 1 1 -8 8 -8 8 8 -8 8
1 1 1 1 1 1 l 1 8 8 8 8 8 8 8 8 1 1 1 l 1 1 1 1 8 8 8 8 8 8 8 8 1 1 1 1 1 1 1 1 8 8 8 8 8 8 8 8 1 1 1 1 1 1 1 1 8 8 8 8 8 8 8 8 1 1 1 1 1 1 1 1 8 8 8 8 8 8 8 8 1 1 l 1 1 1 1 1 8 8 8 8 8 s 8 8 1 1 1 1 1 1 1 1 8 8 8 8 8 8 8 8 l 1 1 l 1 l l 1 8 8 8 8 8 s 8 8
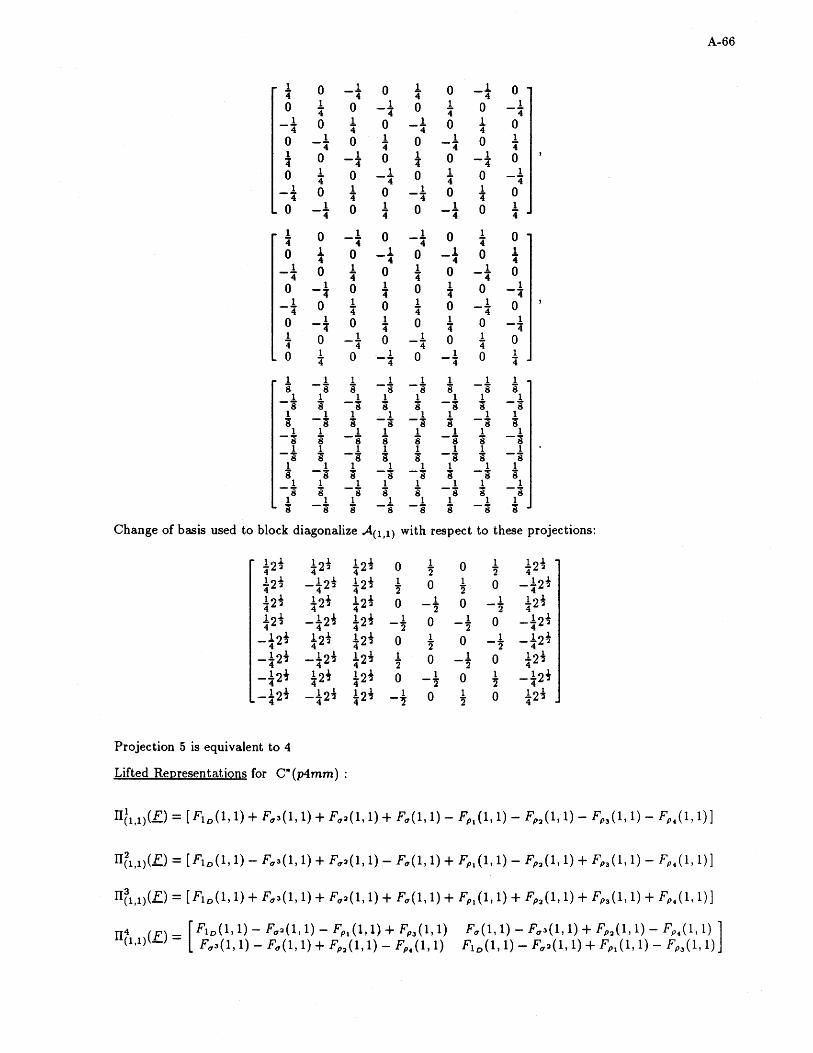
A-66
1 0 -i 0 1 0 1 0 4 4 -4 0 1 0 1 0 1 0 1
4 -4 4 -4 1 0 1 0 1 0 1 0 -4 4 -4 4
0 1 0 1 0 1 0 1 -4 4 -4 4
1 0 1 0 1 0 1 0 4 -4 4 -4 0 1 0 1 0 1 0 1
4 -4 4 -4 1 0 1 0 1 0 1 0 -4 4 -4 4
0 1 0 1 0 1 0 1 -4 4 -4 4 1 0 _! 0 1 0 1 0 4 4 -4 4 0 ! 0 1 0 1 0 1
4 -4 -4 4 1 0 1 0 1 0 1 0 -4 4 4 -4
0 1 0 1 0 1 0 1 -4 4 4 -4
1 0 1 0 1 0 1 0 -4 4 4 -4 0 1 0 1 0 1 0 1
-4 4 4 -4 1 0 1 0 1 0 1 0 4 -4 -4 4 0 1 0 1 0 1 0 1
4 -4 -4 4 1 1 1 1 -i 1 1 1 8 -8 8 -8 8 -8 8
1 1 1 1 1 1 1 1 -8 8 -8 8 8 -8 8 -8
1 1 1 1 1 1 1 1 8 -8 8 -8 -8 8 -8 8
1 1 1 1 1 1 1 1 -8 8 -8 8 8 -8 8 -8
1 1 1 1 1 1 1 1 -8 8 -8 8 8 -8 8 -8
1 1 1 1 1 1 1 1 8 -8 8 -8 -8 8 -8 8 1 1 1 1 1 1 1 1
-8 8 -8 8 8 -8 8 -8 1 1 1 1 1 1 1 1 8 -8 8 -8 -8 8 -8 8
Change of basis used to block diagonalize A(l,1) with respect to these projections:
12.l. 12.l. 12! 0 1 0 1 12! 4 2 4 2 4 2 2 4 12! -t2! 12! 1 0 1 0 -i2! 4 4 2 2 12.l. 12.l. 12! 0 1 0 1 12! 4 2 4 l 4 -2 -2 4 12! -i2! 12! 1 0 1 0 -i2; 4 4 -2 -2
-i2; 12! 12! 0 1 0 1 1 .l. 4 4 2 -2 -422
1 1 1 1 121 1 0 1 0 121 -42~ -42~ 4 ~ 2 -2 4 ~
-i21 121 121 0 1 0 1 1 1
4 4 -2 2 -42~
-i21 1 1 121 1 0 1 0 121 -42~ 4 ~ -2 2 4 ~
Projection 5 is equivalent to 4
Lifted ReQresentations for C*(p4mm):
II(t,l)(F) = [F1 0 (1, 1) + F0 3(1, 1) + F0 2(1, 1) + F0 (1, 1) + Fp 1 (1, 1) + Fp2 (1, 1) + Fp3(1, 1) + Fp4 (1, 1)]
II4 (F)= [F1 0 (1, 1)- Fo2(1, 1)- Fp 1 (1, 1) + Fp3(1, 1) Fo(1, 1)- Fo3(1, 1) + Fp 2 (1, 1)- Fp4 (1, 1) l <1·1) - Fo3(1, 1)- Fo(1, 1) + Fp2 (1, 1)- Fp
4 (1, 1) Ft 0 (1, 1)- F0 2(1, 1) + Fp 1 (1, 1)- Fp3(1, 1)
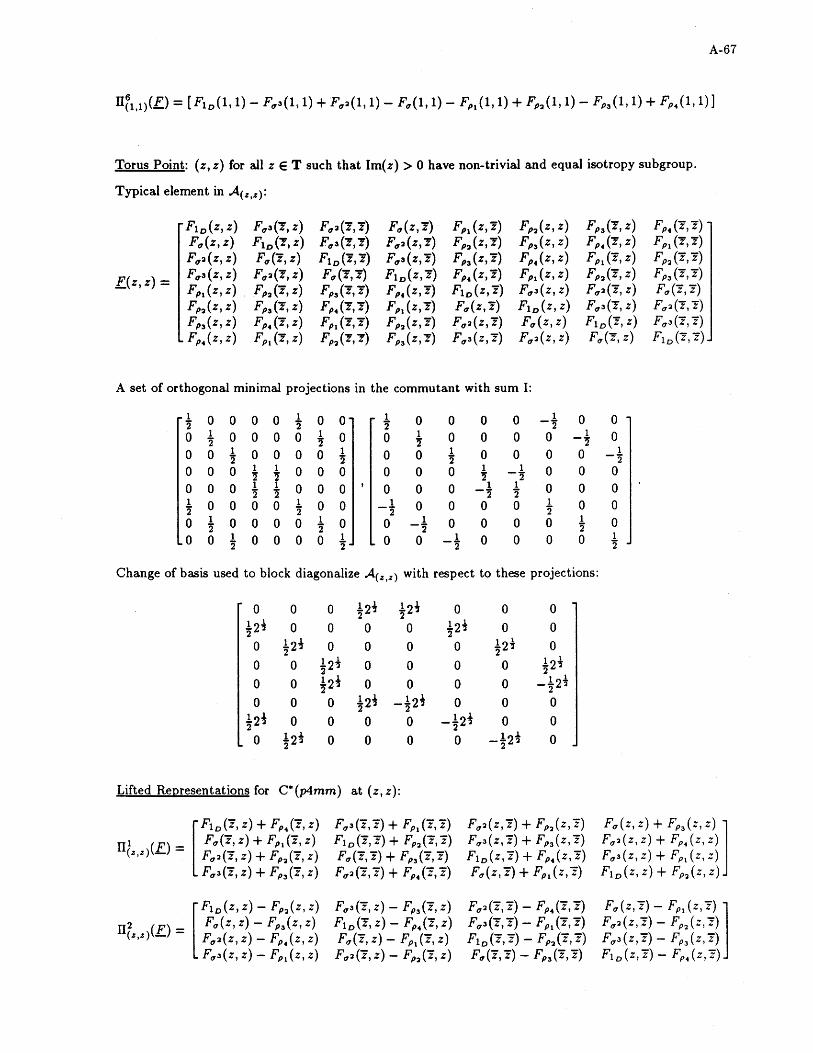
A-67
Torus Point: (z, z) for all z E T such that Im(z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in .A(z,z):
F10 (z, z) F(73(z, z) F(72('Z, z) F(T(z, z) F,1 (z, z) F,2(z, z) F,3(z, z) F,. {z, z) FD(z,z) F10 (z, z) F(73 ('!, Y) F(T'l(Z, '!) F,2(z,Y) F,3{z,z) F,.(Y,z) F,. (z, z) FD2(z, z) F(T(z, z) F10 (z,z) F(T3(z, z) F,3(z, z) F,4 (z,z) Fp 1 (z, z) Fp'J(z,z)
F(z, z) = FD3(z, z) F(72('Z, z) F(T(z, z) F10 (z, z) Fp4 (z, z) Fp 1 (z, z) Fp2 (z, z) Fp3(z, z) Fp1 (z,z) Fp2 (z, z) Fp3 (z, z) Fp4 (z, z) F10 (z, z) FD3(z,z) F(T'J(z, z) Fo(z, z) Fp2 (z, z) Fp3 (z, z) Fp.(z, z) Fp1 (z, z) F(T(z, z) F10 (z, z) F(T3(z, z) Fo'J(z, z) Fp3(z, z) Fp4 (z, z) Fp1 (z, z) Fp2 (z, z) F(72(z, z) F0 (z,z) F10 (z, z) F0 3(z, z) Fp 4 (z,z) Fp 1 (z, z) Fp2 (z, z) Fp3(z, z) Fo3(Z, z) FD'J(z, z) F0 (z, z) F10 (z, z)
A set of orthogonal minimal projections in the commutant with sum 1:
1 0 0 0 0 1 0 0 1 0 0 0 0 1 0 0 2 2 2 -2 0 1 0 0 0 0 1 0 0 1 0 0 0 0 1 0 2 2 2 -2 0 0 1 0 0 0 0 1 0 0 1 0 0 0 0 1
2 2 2 -2 0 0 0 1 1 0 0 0 0 0 0 1 1 0 0 0 2 2 2 -2 0 0 0 1 1 0 0 0 ' 0 0 0 1 1 0 0 0 2 2 -2 2 1 0 0 0 0 1 0 0 1 0 0 0 0 1 0 0 2 2 -2 2 0 1 0 0 0 0 1 0 0 1 0 0 0 0 1 0 2 2 -2 2 0 0 1 0 0 0 0 1 0 0 1 0 0 0 0 1
2 2 -2 2
Change of basis used to block diagonalize .A(z,z) with respect to these projections:
0 0 0 121 2
12i 2 0 0 0
121 2 0 0 0 0 12i
2 0 0
0 12i 2 0 0 0 0 121
2 0
0 0 121 0 0 0 0 121 2 2 ~
0 0 121 0 0 0 0 1 1
2 -22~
0 0 0 121 2 -~21 0 0 0
121 2 0 0 0 0 -~21 0 0
0 12l 0 0 0 0 1 .1 0 2 -22'J
Lifted Representations for C*(p4mm) at (z, z):
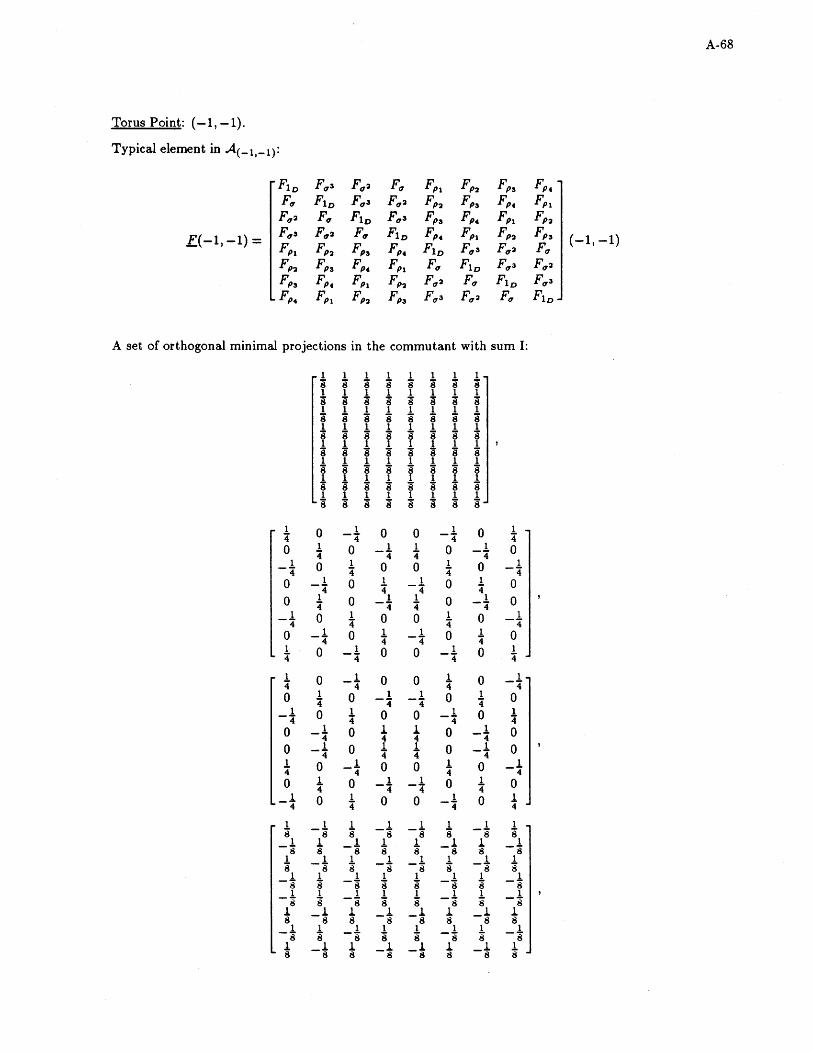
A-68
Torus Point: ( -1, -1).
Typical element in A(- 1,-1):
FlD Ff73 Ff7l Ff7 FPt Fp, FP3 FP• Ff7 F1D Ff73 Ff7l Fp, FP3 FP• FPt Ff7l Ff7 F1D Ff73 FP3 Fp. FPt Fp,
F(-1, -1) = Ff73 Ff7, Ff7 FtD Fp. Fp. Fpl FP3 ( -1, -1) FP• Fp, FP3 Fp. FtD Ff73 Ff7l Ff7 Fp, FP3 FP4 FPt Ff7 FlD Ff73 Ff7, FP3 Fp. FPt Fp, Ff7, Ff7 F1D Ff73 Fp. FP• Fp, FP3 Ff73 Ff7, Ff7 F1D
A set of orthogonal minimal projections in the commutant with sum 1:
1 1 1 1 1 1 1 1 s s s s s s s s 1 1 1 1 1 1 1 1 s 8 8 8 s 8 8 8 1 1 1 1 1 1 1 1 8 s s 8 s s s 8 1 1 1 1 1 1 1 1 s 8 s s s 8 s s 1 1 1 1 1 1 1 1 8 s s s 8 s 8 8 1 1 1 1 1 1 1 1 8 s 8 8 s 8 s 8 1 1 1 1 1 1 1 1 s s s 8 s s s s 1 1 1 1 1 1 1 1 s s s s s s s s
1 0 1 0 0 1 0 1 4 -4 -4 4 0 1 0 1 1 0 1 0 4 -4 4 -4
1 0 1 0 0 1 0 1 -4 4 4 -4 0 1 0 1 1 0 1 0 -4 4 -4 4 0 1 0 1 1 0 1 0 4 -4 4 -4
1 0 1 0 0 1 0 1 -4 4 4 -4 0 -i 0 1 1 0 1 0 4 -4 4 1 0 1 0 0 1 0 1 4 -4 -4 4
1 0 -i 0 0 ! 0 1 4 4 -4 0 1 0 1 1 0 1 0 4 -4 -4 4
1 0 1 0 0 1 0 1 -4 4 -4 4 0 1 0 ! 1 0 1 0 -4 4 4 -4 0 1 0 1 1 0 1 0 -4 4 4 -4 1 0 _! 0 0 1 0 1 4 4 4 -4 0 1 0 1 1 0 ! 0 4 -4 -4 4
1 0 ! 0 0 -i 0 ! -4 4 4
1 1 1 1 1 1 1 1 8 -8 8 -8 -8 8 -8 8
1 1 1 1 1 1 1 1 -8 8 -8 8 8 -8 8 -8
1 1 1 1 1 1 1 1 8 -8 8 -8 -8 8 -8 8
1 1 1 1 1 1 ! 1 -8 8 -8 8 8 -8 8 -8
1 1 1 1 1 1 ! 1 -8 8 -8 8 8 -8 8 -8 ! _! l -i -i l -i ! 8 8 8 8 8
1 1 1 1 1 1 1 1 -8 8 -8 8 8 -8 8 -8 l -i ! -i _l ! _l l 8 8 8 8 8 8

A-69
1 1 i 1 1 1 1 1 8 8 8 -8 -8 -8 -8 1 1 1 1 1 1 1 1 8 8 8 8 -8 -8 -8 -8 1 1 1 1 1 1 1 1 8 8 8 8 -8 -8 -8 -8 1 1 1 1 1 1 1 1 8 8 8 8 -8 -8 -8 -8
1 1 1 1 1 1 1 1 -w -w -8 -w w 8 8 8 1 1 1 1 1 1 1 1
-8 -w -8 -8 8 8 8 8 1 1 1 1 1 1 1 1 -w -w -8 -w w i i 8 1 1 1 1 1 1 1 1 -w -w -8 -8 8 8 8 8
1 1 1 1 1 1 1 1 w -8 w -w w -w i -w 1 1 1 1 1 1 1 1 -w i -w 8 -w 8 -8 8
1 1 1 1 1 1 1 1 8 -8 8 -8 i -8 8 -8
1 1 1 1 1 1 1 1 -8 8 -8 i -8 8 -w 8
1 1 1 1 1 1 1 1 8 -8 8 -8 8 -8 8 -8 1 1 1 1 1 1 1 1
-8 8 -8 8 -8 8 -8 8 1 1 1 1 1 1 1 1 8 -8 i -w i -w i -w
1 1 1 1 1 1 _1 1 -w 8 -w 8 -w i 8 i
Change of basis used to block diagonalize .A(- 1,- 1) with respect to these projections:
121 0 1 1 0 121 121 121 4 2 2 4 4 4
121 1 0 0 1 -i-2; 121 -i-21 4 2 2 4 121 0 1 1 0 121 !21 121 4 -2 -2 4 4 4
121 1 0 0 1 1 l 121 -i-21 4 -2 -2 -42:l 4 ~ 121 1 0 0 1 -i-2; -i-21 121 4 2 -2 4 12l 0 1 1 0 121 1 1 -t21 4 :l -2 2 4 -42~
121 1 0 0 1 -t21 -t21 121 4 -2 2 4
121 0 1 1 0 121 -i-21 -i-21 4 2 -2 4
Projection 3 is equiv to 2
Lifted ReQresentations for C*{p4mm) at ( -1, -1):
ll{_ 1,-1)(F) =F1 0 {-1, -1) + Fa3{-1, -1) + Fa:l{-1, -1) + Fa{-1, -1)
+ Fp1 ( -1, -1} + Fp:l( -1, -1} + Fp3( -1, -1) + FPt ( -1, -1)
n~-1,-l)(.E) =
ll(_1,- 1)(F) =F1 0 ( -1, -1)- Fa3( -1, -1) + Fa:l( -1, -1)- Fa( -1, -1)
- Fp1(-1, -1) + Fp:l(-1, -1)- Fp3{-1, -1) + Fp4 (-1, -1)
ll(-t,-t)(F) =Ft 0 ( -1, -1) + Fa3( -1, -1) + Fa:l( -1, -1) +Fa( -1, -1)
- Fp1 ( -1, -1)- Fp,( -1, -1)- Fp3( -1, -1)- FPt ( -1, -1)
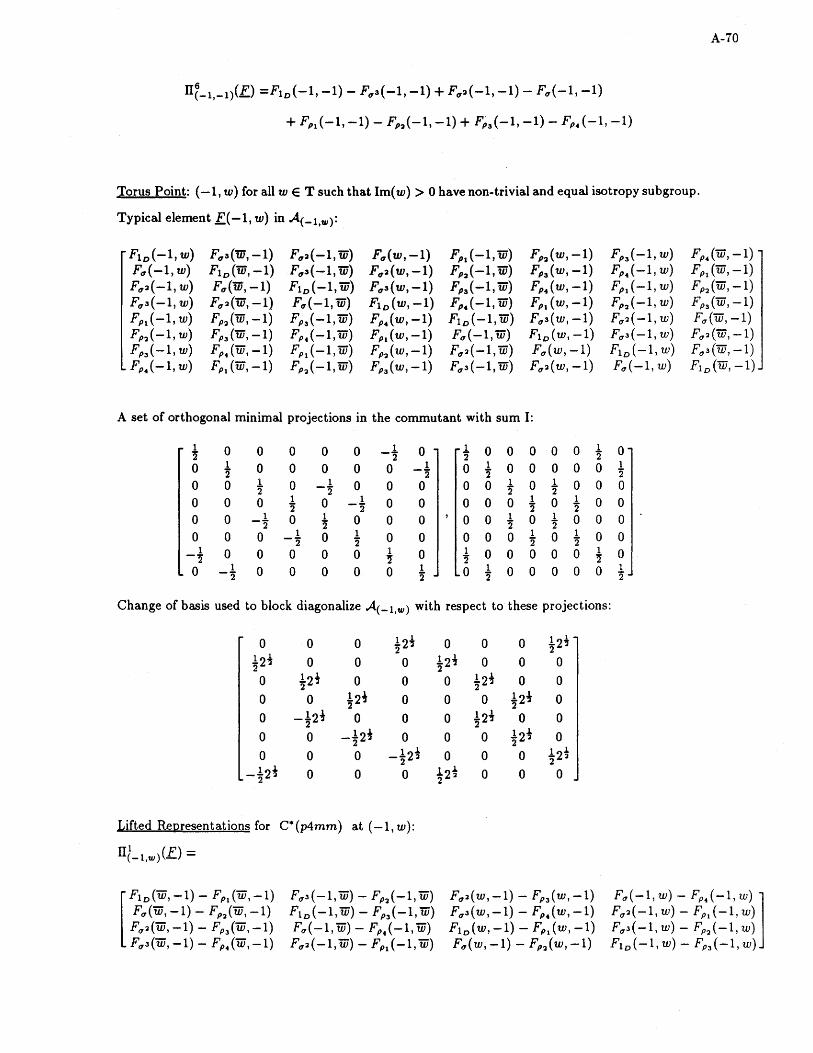
A-70
ll~- 1 ,-t)(F) =Ft0 ( -1, -1)- F~3( -1, -1) + F~,( -1, -1)- F~( -1, -1)
+ FPl ( -1, -1)- Fp,( -1, -1) + Fp3( -1, -1)- Fp. ( -1, -1)
Torus Point: ( -1, w) for all wE T such that Im( w) > 0 have non-trivial and equal isotropy subgroup.
Typical element F( -1, w) in .A(-l,w):
Ft 0 (-1, w) F~( -1, w) F~,(-1, w) F~J(-1, w) Fp1 ( -1, w) Fp,( -1, w) Fp3 ( -1, w) Fp.( -1, w)
F~3(lii, -1) F1 0 (w, -1) F~(w,-1) F~,(w, -1) Fp,(w, -1) Fp3 (w, -1) Fp.(w, -1) Fp 1 (w, -1)
F~,(-1,w) F~3(-1, w) F10 (-1,w) F~(-1,w) Fp 3 (-1,w) Fp.(-1,w) Fp 1 (-1,w) Fp,(-1, w)
F~(w, -1) F~,(w,-1)
F~3(w,-1) F1 0 (w, -1) Fp.(w, -1) Fp1 (w,-1) Fp,(w, -1) Fp3 (w, -1)
Fp1 (-1,w) Fp2 (-1, w) Fp3 ( --1, w) Fp.(-1, w) F1 0 (-1, w) F~(-1,w) p~,(-1,w)
F~3(-1, w)
Fp2 (w, -1) Fp3 (w, -1) Fp4 (w, -1) Fp 1 (w, -1) F~3(W, -1) Ft 0 (w, -1) F~(w, -1) F~l(W, -1)
A set of orthogonal minimal projections in the commutant with sum 1:
1 0 0 0 0 0 1 0 1 0 0 0 0 0 2 -2 2 0 1 0 0 0 0 0 1 0 1 0 0 0 0 2 -2 2 0 0 1 0 1 0 0 0 0 0 1 0 1 0 2 -2 2 2 0 0 0 1 0 1 0 0 0 0 0 1 0 1
2 -2 2 2 0 0 1 0 1 0 0 0
, 0 0 1 0 1 0 -2 2 2 2
0 0 0 1 0 1 0 0 0 0 0 1 0 1 -2 2 2 2 1 0 0 0 0 0 1 0 1 0 0 0 0 0 -2 2 2
0 1 0 0 0 0 0 1 0 1 0 0 0 0 -2 2 2
1 2 0 0 0 0 0 1 2 0
Fp3 ( -1, w) Fp4 (-1,w) Fp 1 ( -1, w) Fp,( -1, w) F~2( -1, w) F~3( -1, w) Ft 0 (-1,w) F~(-1, w)
0 1 2 0 0 0 0 0 1 2
Fp.(w, -1) Fp 1 (w, -1) Fp2 (w, -1) Fp3 (w, -1) F~(w, -1) F~2(w, -1) F~3(tv, -1) Ft 0 (w, -1)
Change of basis used to block diagonalize .A(-1,w) with respect to these projections:
0 0 0 12! 2 0 0 0 12!
2 12! 2 0 0 0 12!
2 0 0 0
0 12! 2 0 0 0 121 2 ~ 0 0
0 0 12! 2 0 0 0 12!
2 0
0 -!2; 0 0 0 12! 2 0 0
0 0 -!21 0 0 0 121 2 0
0 0 0 1 J. 0 0 0 121 -222 2 1 l. 0 0 0 121 0 0 0 -222 2
Lifted Re:Qresentations for c•(p4mm) at ( -1, w):
ll{-l,w)(F) =
[ F1 0 (W, -1)- F,, (W, -1) F ~3 ( -1, w) - F p, ( -1, w) F~2(w,-1)- Fp3(w,-1) F.( -1, w)- F,,( -1, w) ] F~(w, -1)- Fp,(w, -1) F10 (-1,w)- Fp3(-1,w) F~3(w,-1)- Fp4 (w,-1) F~,( -1, w)- Fp
1 ( -1, w)
F~,(w,-1)- Fp3(w,-1) F~(-1,w)- Fp.(-1,w) F10
(w, -1)- Fp 1 (w, -1) F~J( -1, w)- Fp,( -1, w) F~3(w,-I)- Fp.(w,-1) F~,( -1, w)- Fp 1 ( -1, w) F~(w, -1)- Fp2 (w, -1) Ft D ( -1' w) - Fp3 ( -1, w)
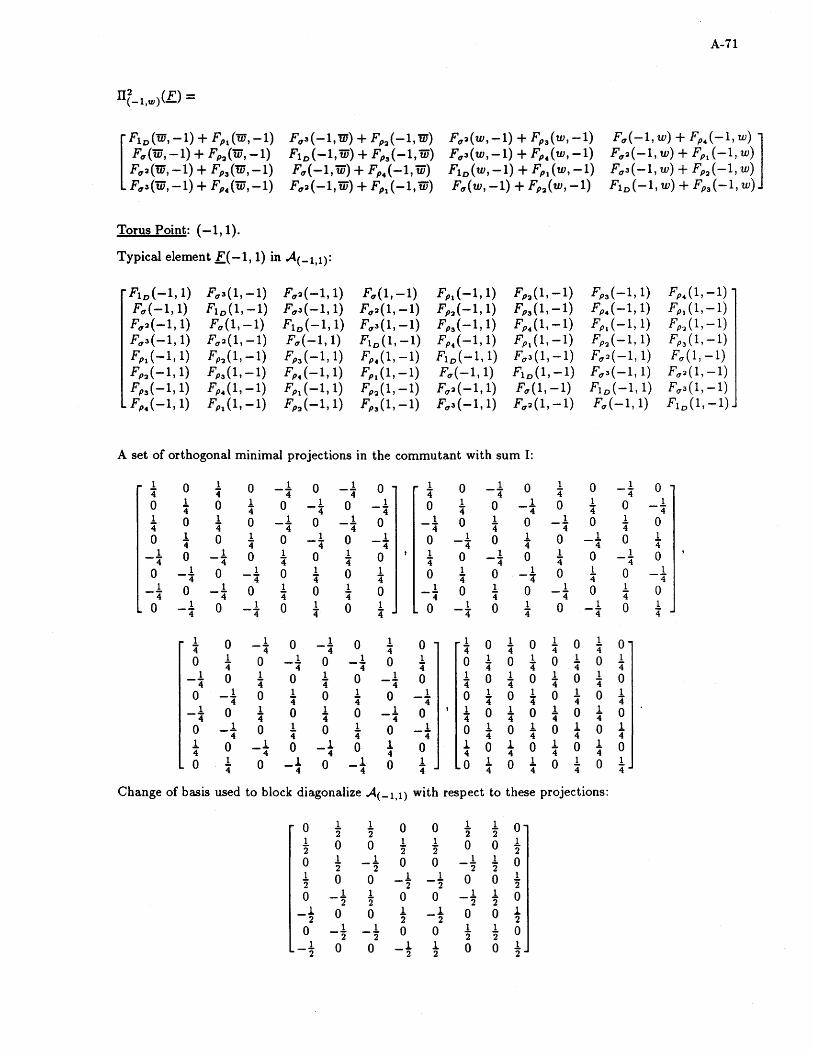
A-71
[
F1D(w, -1) + Fp1 (w, -1) F~3{-1, w) + Fp2 (-1, w) F~2(w, -1) + Fp3(w, -1) F~{-1, w) + Fp4 ( -1, w) ] F~(w, -1) + Fp2(w, -1) F1D{-1, w) + Fp3{-1, w) F~3(w, -1) + Fp 4 (w, -1) F~2{-1, w) + Fp 1 ( -1, w) F~2(w, -1) + Fp3(w, -1) F~( -1, w) + Fp.( -1, w) F1D(w, -1) + Fp1 (w, -1) F~3( -1, w) + Fp2 ( -1, w) F~3(w, -1) + Fp4 (w,-1) F~2(-1, w) + Fp1(-1, w) F~(w, -1) + Fp2(w, -1) F1D( -1, w) + Fp3 ( -1, w)
Torus Point: ( -1, 1).
Typical element F( -1, 1) in .A(-1,1):
F1D(-1, 1) F~3(1, -1) F~2( -1, 1) F~(1,-1) Fp1 ( -1, 1) Fp2(1, -1) Fp3( -1, 1) Fp4 (1, -1) F~{-1,1) F1D{1, -1) F~3( -1, 1) F~2(l, -1) Fp2( -1, 1) Fp3(1,-1) Fp4 (-1, 1) Fp
1 (1, -1)
F~2{-1, 1) F~(1,-1) F1D{-1,1) F~3(1, -1) Fp3( -1, 1) Fp4 (1,-1) Fp1 (-1, 1) FP2 (1, -1) F~3(-1, 1) Fq2{1, -1) Fq( -1, 1) F1 0 (1, -1) Fp4 (-1,1) Fp1 {1,-1) Fp2( -1, 1) Fp3(1,-1) FP1 ( -1, 1) Fp2(1, -1) Fp3( -1, 1) Fp4 (1, -1) F1 0 ( -1, 1) Fq3(1, -1) F~2(-1, 1) F(7(1, -1) Fp2 (-1, 1) Fp3(1, -1) Fp4 {-1,1) Fp 1 {1, -1) F~{-1, 1) F1 0 {1, -1) F~J(-1, 1) F~2(1, -1) Fp3( -1, 1) Fp4 (1,-1) Fp1 ( -1, 1) Fp2 (1, -1) F~2(-1,1) F~(1,-1) F1 0 ( -1, 1) F~3(1, -1) Fp4 (-1,1) FPl {1, -1) Fp2( -1, 1) Fp3 (1, -1) F~3( -1, 1) F~2(1, -1) Fq(-1, 1) F1 0 (1, -1)
A set of orthogonal minimal projections in the commutant with sum 1:
1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 4 4 -4 -4 4 -4 4 -4 0 1 0 1 0 _l 0 1 0 1 0 1 0 1 0 1
4 4 4 -4 4 -4 4 -4 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 4 4 -4 -4 -4 4 -4 4 0 ! 0 1 0 1 0 -~ 0 1 0 1 0 1 0 1
4 4 -4 -4 4 -4 4 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 -4 -4 4 4 4 -4 4 -4
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 -4 -4 4 4 4 -4 4 -:r
1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 -4 -4 4 4 -4 4 -4 4 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
-4 -4 4 4 -4 4 -4 4
1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 4 -4 -4 4 4 4 4 4 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
4 -4 -4 4 4 4 4 4 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 -4 4 4 -4 4 4 4 4
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 -4 4 4 -:r 4 4 4 4
1 0 1 0 l 0 1 0 ! 0 1 0 ! 0 1 0 -:r 4 4 -4 4 4 4 4 0 _! 0 1 0 1 0 1 0 1 0 1 0 ! 0 1
4 4 4 -4 4 4 4 4 1 0 _1 0 _1 0 1 0 1 0 1 0 ! 0 ! 0 4 4 4 4 4 4 4 4
0 1 0 1 0 1 0 l 0 1 0 1 0 1 0 1 4 -4 -4 4 4 4 4 4
Change of basis used to block diagonalize .A(- 1,1) with respect to these projections:
0 1 1 0 0 1 1 0 2 2 2 2 1 0 0 1 1 0 0 1 2 2 2 2 0 1 1 0 0 1 1 0 2 -2 -2 2 1 0 0 1 1 0 0 1 2 -2 -2 2 0 1 1 0 0 1 1 0 -2 2 -2 2
_1 0 0 1 _1 0 0 1 2 2 2 2
0 1 1 0 0 1 1 0 -2 -2 2 2 -~ 0 0 -~ 1 0 0 1
2 2
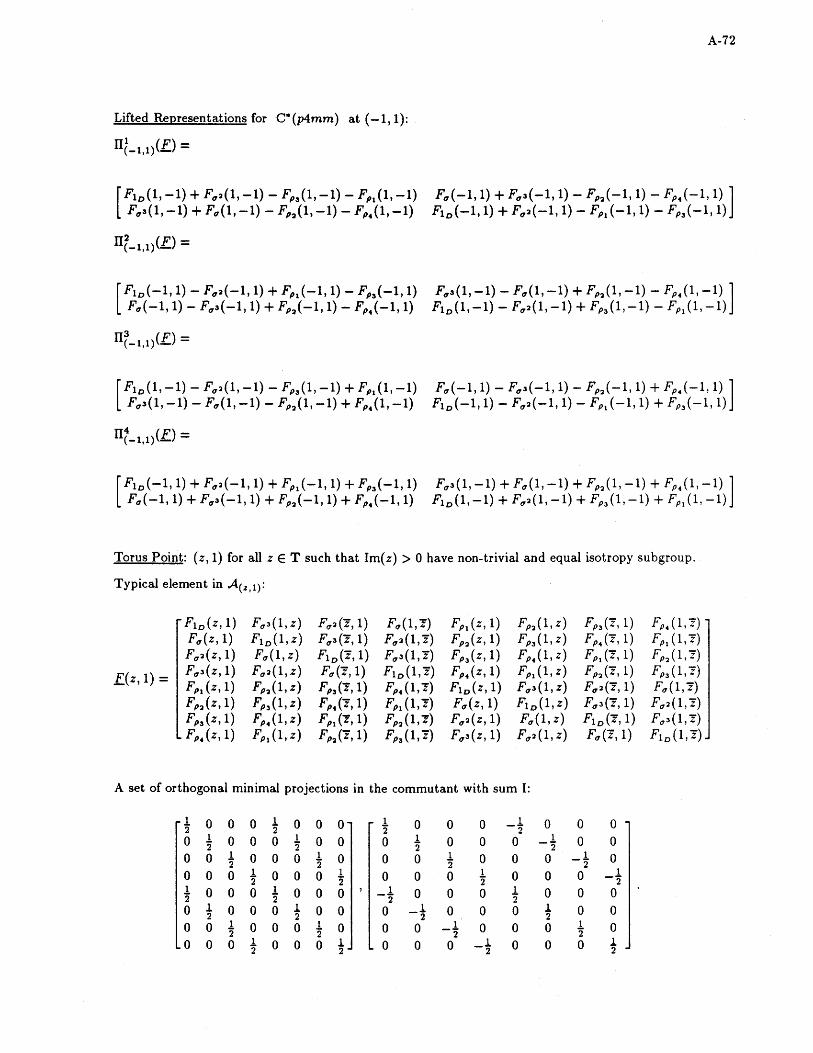
Lifted Representations for C*(p4mm) at ( -1, 1):
nt-l,l)(F) =
A-72
[ Ft0 {1, -1) + F172(1, -1)- Fp3 (1, -1)- Fp 1 (1, -1) F17 ( -1, 1) + F17:s( -1, 1)- Fp2( -1, 1) - Fp 4 ( -1, 1) l F17:s(1, -1) + F17 (1, -1)- Fp2(1, -1)- Fp4 (1, -1) Ft 0 (-1, 1) + F172( -1, 1)- Fp1 ( -1, 1)- Fp3 ( -1, 1)
IIl-t,t)(F) =
[ Ft0 ( -1, 1)- F172( -1, 1) + Fp 1 ( -1, 1)- Fp3 ( -1, 1) F17:s(l, -1)- F17 (1, -1) + Fp2(1, -1) - Fp 4 (1, -1) l F0'(-1, 1)- F17:s(-1, 1) + Fp2(-1, 1)- Fp
4(-1, 1) Ft
0(1,-1)- F172(1,-1) + Fp3 (1,-1)- Fp 1 (1,-1)
II~-t,1)(F) =
[ Ft 0 (1, -1) - F172(1, -1) - Fp3 (1, -1) + Fp 1 (1, -1) Fu( -1, 1) - F17 :s( -1, 1) - Fp2( -1, 1) + Fp .. ( -1, 1) l F17:s(l, -1)- F17 (1, -1)- Fp2(1, -1) + Fp
4(1, -1) Ft
0( -1, 1)- F172( -1, 1)- Fp 1 ( -1, 1) + Fp3 ( -1, 1)
II( -t,t)(F) =
[Ft 0 (-1, 1) + F172(-1, 1) + Fp 1 (-1, 1) + Fp3 (-1, 1) F17:s(1,-1) + F17 (1,-1) + Fp2 (1, -1) + Fp 4 (1, -1) l FIT( -1, 1) + F17:s( -1, 1) + Fp2( -1, 1) + Fp
4 ( -1, 1) Ft
0(1, -1) + F172(1, -1) + Fp 3 (1, -1) + Fp 1 (1, -1)
Torus Point: (z, 1) for all z E T such that Im(z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(z,l):
Ft0 (z, 1) F17:s(1,z) F172(z, 1) Fu(1, z) Fp 1 (z, 1) Fp2(1,z) Fp3 (z, 1) Fp. (1, z) F17 (z, 1) Ft 0 (1,z) F17:s(z, 1) F17 2(1, z) Fp2(z, 1) Fp3 (1, z) Fp4 (z, 1) Fp
1 (1, z)
F172(z, 1) F17 (1,z) Ft 0 (z, 1) F17:s(1, z) Fp 3 (z, 1) Fp4(1, z) Fp 1 (z, 1) Fp2(1, z)
F(z, 1) = F17:s(z, 1) F172(1,z) Fu(z, 1) Ft 0 (1, z) Fp 4 (z, 1) Fp 1 (1,z) Fp2 (z, 1) Fp 3 (1, z) Fp 1 (z,1) Fp2(1, z) Fp3 (z, 1) Fp4 (1, z) Ft 0 (z, 1) F17:s(1, z) F17 2(z, 1) Fu(1, z) Fp2(z, 1) Fp 3 (1,z) Fp4 (z, 1) Fp 1 (1, z) F17 (z,1) Ft 0 (1, z) F17 3(z, 1) F17:z(1, z) Fp3 (z, 1) Fp 4 (1,z) Fp1 (z, 1) Fp2(1, z) F172(z, 1) F17 (1,z) F10 (z, 1) F17:s(1, z) Fp4 (z, 1) Fp 1 (1,z) Fp2 (z, 1) Fp3 (1, z) F17 3 ( Z, 1) F172(1, z) FO'(z, 1) Ft 0 (1,z)
A set of orthogonal minimal projections in the commutant with sum 1:
1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 2 2 2 -2 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 2 2 2 -2 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 2 2 2 -2 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1
2 2 2 -2 1 0 0 0 1 0 0 0
, 1 0 0 0 1 0 0 0 2 2 -2 2 0 l 0 0 0 l 0 0 0 _l 0 0 0 l 0 0 2 2 2 2 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 2 2 -2 2 0 0 0 l 0 0 0 l 0 0 0 _l 0 0 0 l
2 2 2 2
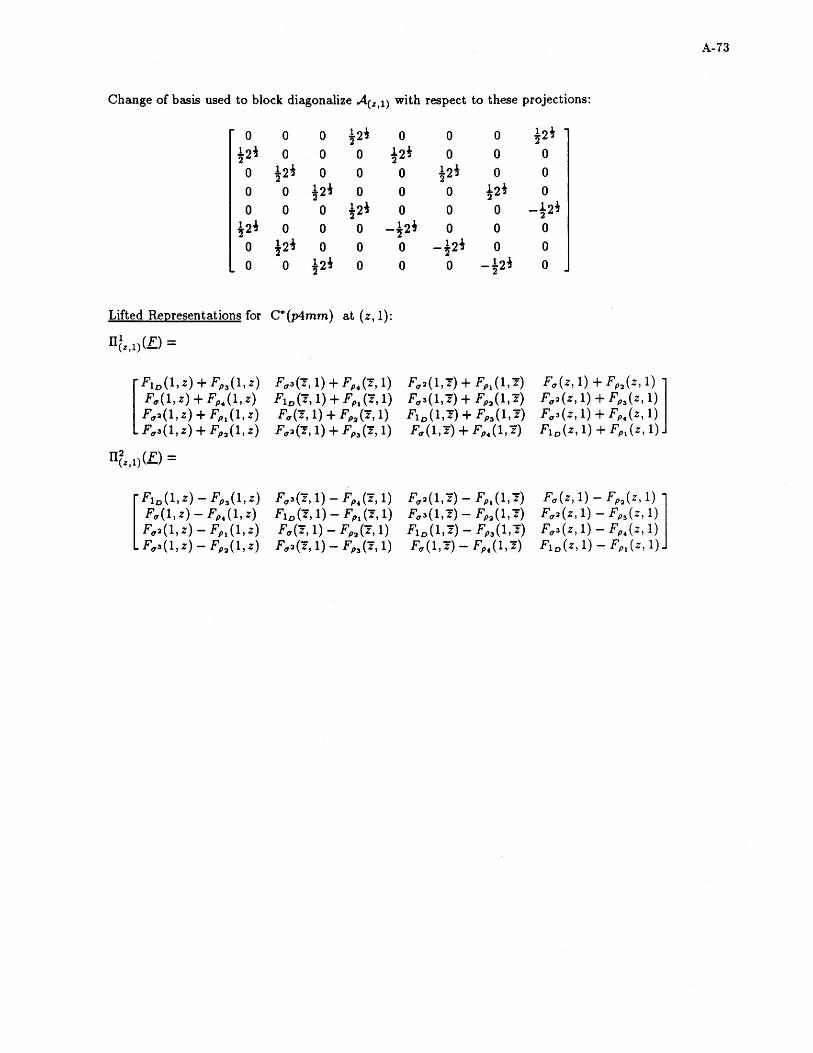
Change of basis used to block diagonalize .A(z,l) with respect to these projections:
!21 0
0
0
!21 0
0
0
0
!21 0
0
0
-!2; 0
0
Lifted Representations for C*{p4mm) at {z, 1):
ntz,l)(F) =
0
0 121 2
0
0
0
-!2' 0
0
0
0
!21 0
0
0
-!2;
12.1 2 l
0
0
0
-!2; 0
0
0
[
F10 {1, z) + Fp3(1, z) Ff73(z, 1} + Fp,.(z, 1) Ff7l{1, z) + Fp1 {1, z) Ff7(z, 1) + Fp2 (z, 1) ] Ff7(1,z) + Fp,.(1,z) F10 (z, 1) + Fp 1 (z, 1} Ff73{1,z} + Fp2(1,z) Ff72(z, 1} + Fp3(z, 1) Ff72(l, z} + Fp 1 (1, z) Ff7(z, 1} + Fp2 (z, 1) F10 {1, z) + Fp3 {1, z) Ff73 (z, 1) + Fp 4 (z, 1) Ff7,(1,z) + Fpl(1,z} Ff72(z, 1} + Fp3(z, 1) Ff7(1,z) + Fp,.(l,z) F1 0 (z, 1) + Fp 1 (z, 1)
TI~z,l)(F) =
A-73
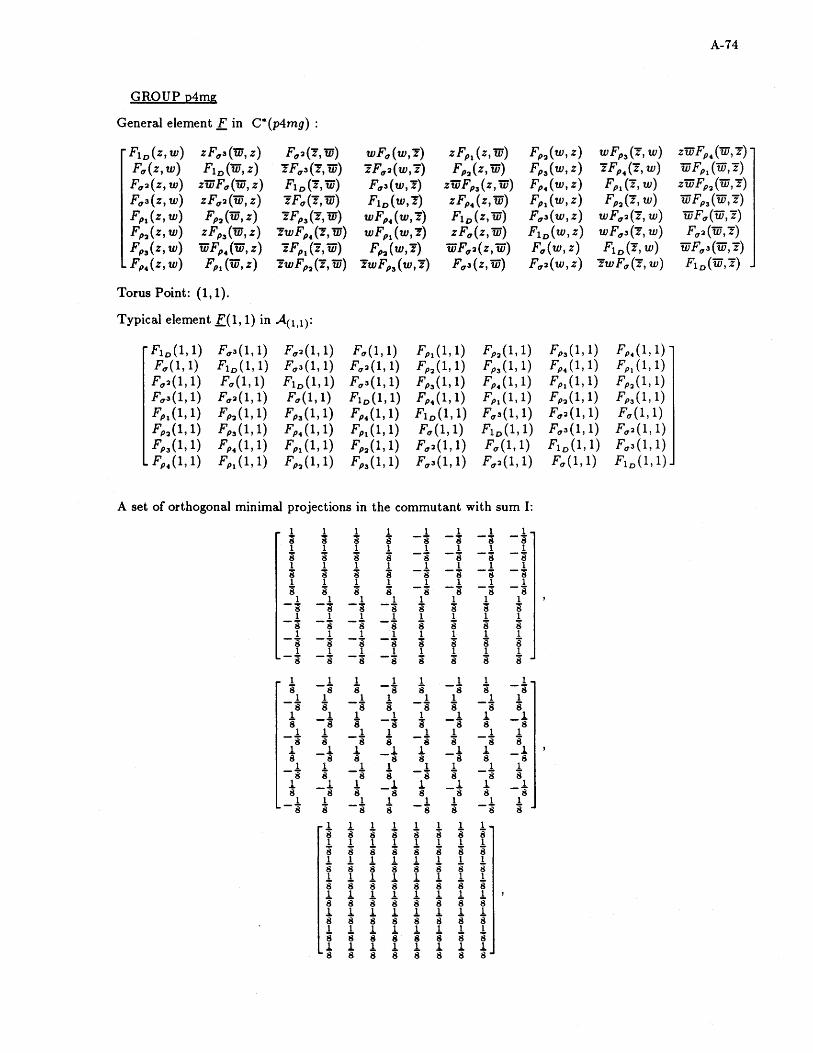
GROUP p4mg
General element Fin C*(p4mg) :
F1 0 (z, w) F(7(z, w) F(7~(z, w) F(73(z, w) Fp1 (z, w) Fp~(z, w) Fp3 (z, w) Fp4 (z, w)
zF(73(w, z) F10 (iii, z)
zwF(7(w,z) zF(7,(iii, z) Fp,(iii,z)
zFp3(w, z) iiiFp4 (iii,z)
Fp1 (iii, z)
Torus Point: (1, 1).
F(7,(z, w) zF(73(z, w) F1 0 (z,w) zF(7(z, iii) zFp3(z,iii)
zwFp4 (z, w) zFp1 (z,iii) zwFp~(z, iii)
Typical element F{1, 1) in A(1,1):
F1 0 (1,1) F173(1, 1) F17,(1, 1) F17 (1, 1) F10 (1, 1) F173(1, 1) F17~(1,1) F17 (1, 1) F1 0 (1,1) F173(1, 1) F17 ~(1, 1) F17 (1, 1) Fp1 {1,1) Fp,(1, 1) Fp3(1,1) Fp,(l, 1) Fp3(1,1) Fp4 (1, 1) FP3(1, 1) FP• (1, 1) Fp1 (1,1) Fp 4 (1, 1) Fp1 (1,1) Fp,(1, 1)
wF(7(w,z) zF(7,(w,z) F(73(w, z) F1 0 (w, z)
wFp4 (w, z)
zFp1 (z, w) Fp,(z, iii)
wFp3(z, w) zFp
4(z, w)
Fp 1 (z, w) Fp,(z, w)
wF(7~(z, w) wFp1 (w, z) Fp,(w,z)
zwFp3(w,z)
zwFp3(z, w) zFp4 (z, iii) F1 0 (z, w) zF(7(z, w)
iiiF(7,(z, iii) F(73(Z, iii)
Fp~(w, z) Fp3 (w, z) Fp4 (w, z) Fp 1 (w, z) F(73(w, z) F1 0 (w,z) F(7(w,z) F(7,(w, z)
wF(73(z, w) F10 {z, w)
zwF17 (z,w)
F17 (1,1) FPl (1, 1) Fp~(1, 1) Fp3(1, 1) Fp4 (1, 1) F17 ,(1, 1) Fp~(1, 1) Fp3(1, 1) Fp. (1, 1) FPl (1, 1) F17 3(1, 1) Fp3(1, 1) Fp4 (1, 1) Fp
1 (1, 1) Fp,(1, 1)
F1 0 (1,1) Fp4 (1,1) Fp1 (1,1) Fp~(1, 1) Fp3 (1, 1) Fp4 (1, 1) F1 0 {1,1) F(73(1,1) F17,{1, 1) F17 (1, 1) Fp1 (1,1) F17 (1,1) F1 0 (l,1) F173(1,1) F17,(1, 1) Fp,(1, 1) F17 ,(1, 1) F17 (1, 1) F1 0 (1, 1) F173(1, 1) Fp3(1, 1) F173(1,1) F17,{1, 1) F17 (1,1) F1 0 (1, 1)
A set of orthogonal minimal projections in the commutant with sum I:
1 ! i i 1 1 _! 1 8 8 -8 -8 8 -8 1 1 1 1 1 1 1 1 8 8 8 8 -8 -8 -8 -8 1 1 1 1 1 1 1 1 8 8 8 8 -8 -8 -8 -8 1 1 1 1 1 1 1 1 8 8 8 8 -8 -8 -8 -8
1 1 1 1 1 1 1 1 -8 -8 -8 -8 8 8 8 8 1 1 1 1 1 1 1 1 -8 -8 -8 -8 8 8 8 8
1 1 1 1 1 1 1 1 -8 -8 -8 -8 8 8 8 8
1 1 1 1 1 1 1 1 -8 -8 -8 -8 8 8 8 8
1 1 1 1 1 1 1 1 8 -8 8 -8 8 -8 8 -8
1 1 1 1 1 1 -1 1 -8 8 -8 8 -8 8 8 8 ! 1 1 1 1 1 ! 1 8 -8 8 -8 8 -8 8 -8
1 ! _! ! -i 1 _! 1 -8 8 8 8 8 8 8 1 -i 1 -i 1 -i 1 -i 8 8 8 8
1 ! _! ! 1 1 1 1 -8 8 8 8 -8 8 -8 8 1 _1 1 _1 1 -i 1 -i 8 8 8 8 8 8
1 1 1 1 1 1 1 1 -8 8 -8 8 -8 8 -8 8
1 1 1 1 ! 1 1 ! 8 8 8 8 8 8 8 8 1 1 1 1 1 1 1 1 8 8 8 8 8 8 8 8 ! 1 1 1 1 ! 1 1 8 8 8 8 8 8 8 8 1 1 1 ! 1 1 1 1 8 8 8 8 8 8 8 8 1 1 1 1 ! 1 1 1 8 8 8 8 8 8 8 8 1 1 1 ! ! ! 1 ! 8 8 8 8 g g g g 1 1 1 1 1 1 1 1 8 8 8 i 8 8 8 8 ! ! ! ! ! 1 ! 1 g g g g g g g g
A-74
zwFp.(w,z) wFp
1(w,z)
zwFp,(w,z) wFp3 (w,z) wF17 (w,z) F17~(w, z)
wF17 3(w,z) F1 0 (w, z)
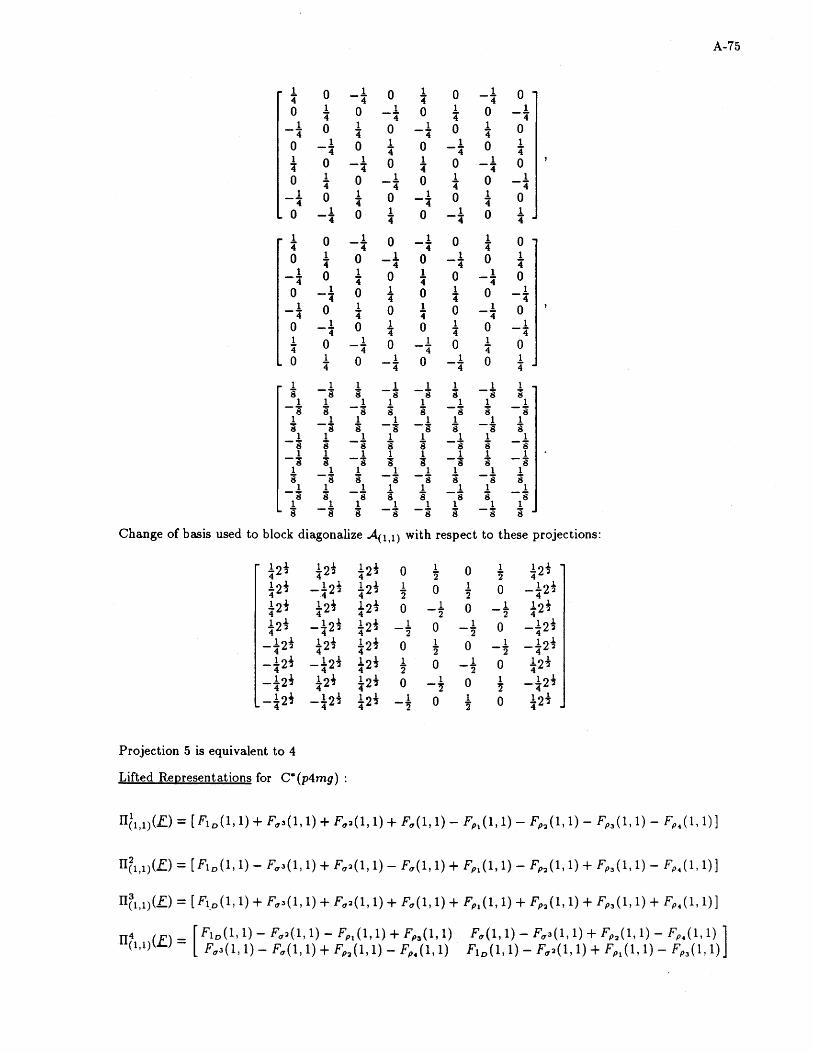
A-75
1 0 -i 0 1 0 1 0 4 4 -4 0 1 0 1 0 1 0 1
4 -4 4 -4 1 0 1 0 1 0 1 0 -4 4 -4 4
0 1 0 1 0 1 0 1 -4 4 -4 4 1 0 1 0 1 0 1 0 4 -4 4 -4 0 1 0 1 0 1 0 1
4 -4 4 -4 1 0 1 0 1 0 1 0 -4 4 -4 4
0 1 0 1 0 1 0 1 -4 4 -4 4 1 0 1 0 1 0 1 0 4 -i -4 4 0 1 0 -i 0 1 0 1
4 -i 4 1 0 1 0 1 0 1 0 -4 4 4 -4
0 1 0 1 0 1 0 1 -4 4 4 -4
1 0 1 0 1 0 1 0 -4 4 4 -4 0 1 0 1 0 1 0 1
-4 4 4 -4 1 0 1 0 1 0 1 0 4 -4 -4 4 0 1 0 1 0 1 0 1
4 -4 -4 4 1 1 1 1 1 1 1 1 8 -8 8 -8 -8 8 -8 8
1 1 1 1 1 1 1 1 -8 8 -8 8 8 -8 8 -8
1 1 1 1 1 1 1 1 8 -~ ~ -~ -~ s -s 8
1 1 1 1 1 1 1 1 -8 8 -8 8 8 -8 8 -8
1 1 1 1 1 1 1 1 -~ ~ -~ ~ ~ -~ 8 -~
1 1 1 1 1 1 1 1 8 -8 8 -8 -8 8 -8 8
1 1 1 1 1 1 1 1 -8 8 -8 8 8 -8 8 -8
1 1 1 1 1 1 1 1 8 -8 8 -8 -8 8 -8 8
Change of basis used to block diagonalize .A(1,1) with respect to these projections:
121 121 121 0 1 0 1 12J. 4 4 4 2 2 4 :l 121 1 J. 121 1 0 1 0 -i21 4 -42:l 4 2 2 121 121 121 0 1 0 1 121 4 4 4 -2 -2 4 121 -!21 12J. 1 0 1 0 -i21 4 4 l -2 -2
-!21 12J. 12J. 0 1 0 1 -t21 4 l 4 l 2 -2 1 1 1 1 121 1 0 1 0 121 -421 -421 4 2 -2 4 1
-t2i 121 121 0 1 0 1 -t21 4 4 -2 2 -!21 1 1 121 1 0 1 0 121 -421 4 -2 2 4
Projection 5 is equivalent to 4
Lifted ReQresentations for C*(p4mg) :
llf1,1)(F) = [F1 0 (1, 1)- Fq3(1, 1) + Fql(1, 1)- F<7(1, 1) + Fp 1 (1, 1)- Fp2 (1, 1) + Fp3(1, 1)- Fp 4 (1, 1)]
nf1 ,1) (F) = { F1.o ( 1, 1) + Fq3 ( 1, 1) + Fql ( 1, 1) + F<T ( 1, 1) + Fp 1 ( 1, 1) + Fp:l ( 1, 1) + Fp 3 ( 1, 1) + Fp. ( 1, 1)]
TI\ 1
(F)= [ Ft 0 (1, 1)- F<72(1, 1)- Fp 1 (1, 1) + Fp3 (1, 1) F<T(l, 1)- Fq3(1, 1) + Fp 2 (1, 1)- Fp4 (1, 1) l ( ')- Fq3(1, 1)- F<T(l, 1) + Fp2 (1, 1)- Fp4 (1, 1) Ft 0 (l,l)- Fql(1, 1) + Fp 1 (1, 1)- Fp3(1, 1)
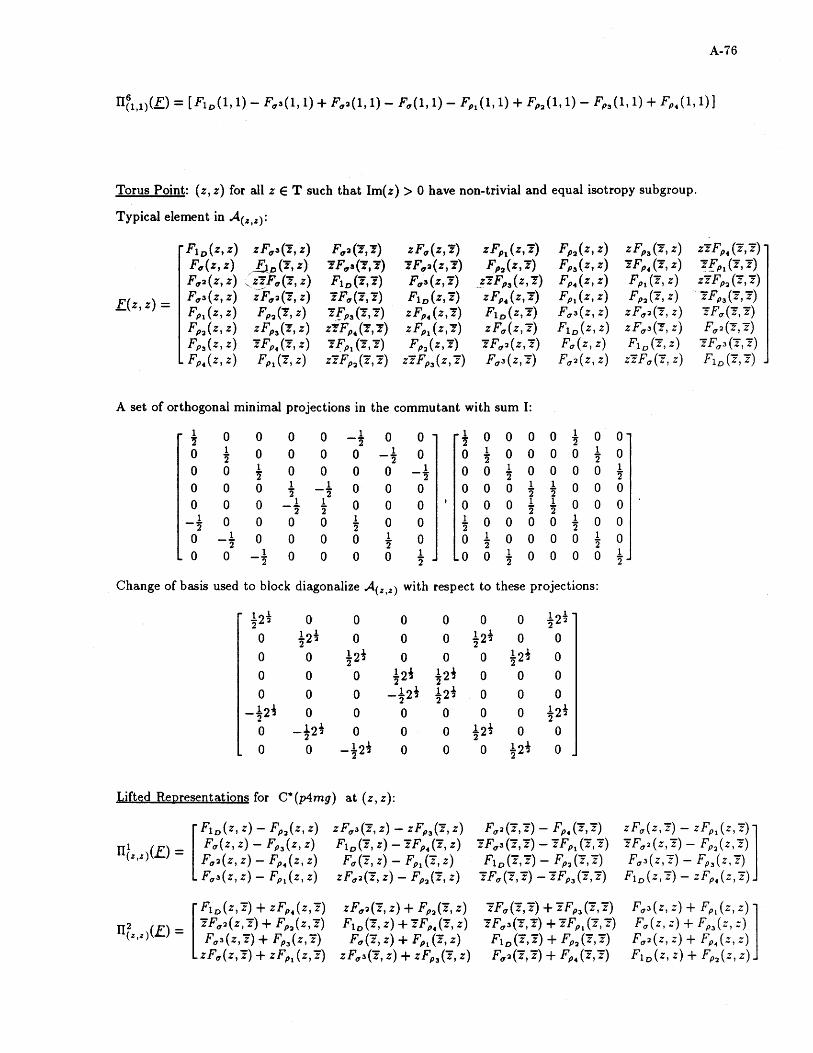
A-76
Torus Point: (z, z) for all z E T such that Im(z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(z,z):
F(z, z) =
Ft 0 (z, z) zF~3(z, z) F~(z,z) Ft 0 (z,z) F~,(z,z) ~~~(z,z) F~3(z, z) iF~,(z, z) Fp 1 (z,z) Fp,(z,z) Fp,(z, z) zFp3(z, z) Fp3(z,z) zFp,.(z,z) Fp,.(z,z) Fp 1 (z,z)
F~,(z,z) zF~3(z, z) F1 0 (z,z) zF~(z, z) zfp3(z,z) zzFp,.(z, z) zFp1 (z, z) zzFp,(z, z)
zF~(z, z) zF~,(z,z) F~3(z, z) Ft 0 (z, z) zFp,. (z, z) zFp1 (z, z) Fp,(z, z)
zzFp3(z, z)
zFp1 (z, z) Fp,(z, z)
-~zFp3 (z, z) zFp4 (z, z) F1 0 (z, z) zF~(z, z) zF~,(z,z)
F~3(z, z)
Fp,(z,z) Fp3 (z,z) Fp4 (z, z) Fp 1 (z, z) F~3(z,z) F1 0 (z, z) Fo(z, z) F17 2(z, z)
A set of orthogonal minimal projections in the commutant with sum 1:
1 0 0 0 0 1 0 0 1 0 0 0 0 1 0 2 -2 2 2 0 1 0 0 0 0 1 0 0 1 0 0 0 0 1
2 -2 2 2 0 0 1 0 0 0 0 1 0 0 1 0 0 0 0 2 -2 2 0 0 0 1 1 0 0 0 0 0 0 1 1 0 0 2 -2 2 2 0 0 0 1 1 0 0 0 ' 0 0 0 1 1 0 0 -2 2 2 2 1 0 0 0 0 1 0 0 1 0 0 0 0 1 0 -2 2 2 2 0 1 0 0 0 0 1 0 0 1 0 0 0 0 1
-2 2 2 2 0 0 1 0 0 0 0 1 0 0 1 0 0 0 0 -2 2 2
Change of basis used to block diagonalize A(z,z) with respect to these projections:
12.!. 2 2 0 0 0 0 0 0 12.!. 2 2
0 12.!. 2 2 0 0 0 121 2 0 0
0 0 121 2 0 0 0 12.1 2 2 0
0 0 0 12-! 2
12-! 2 0 0 0
0 0 0 -!2; 12-! 2 0 0 0
-!21 0 0 0 0 0 0 1 2.1 2 2
0 -!2; 0 0 0 121 2 0 0
0 0 -!2; 0 0 0 12-! 2 0
Lifted Representations for C*(p4mg) at (z, z):
[ F, 0 (z, z)- F,,(z, z) zF173(z, z)- zFp3(z, z) F172(z,z)- Fp,.(z,z)
ll{z,z)(F) = Fo(z, z)- Fp3(z, z) F1 0 ("z, z)- zFp,.(z, z) zF173(z, z)- zFp 1 (z, z) F~2(z, z)- Fp,.(z, z) F~(z, z)- Fp 1 (z, z) F1o (z, z)- Fp2 (z, z) F17 3(Z, z)- Fp 1 (z, z) zF172(z, z)- Fp2(z, z) zFo(z,z)- zFp3(z,z)
[ F,0 (z, Z) + zF,, (z, Z) zF~2(z, z) + Fp2(z, z) zF~(z, z) + zFp3(z, z) II2 (F)= zFo2(Z, z) + FP2(z, z) Ft 0 (z, z) + zFp,.(z, z) zF173(z, z) + zFp 1 (z, z)
(z,z) - F173(z, z) + Fp3(z, z) F~(z, z) + Fp 1 (z, z) Ft 0 (z, z) + Fp2 (z, z)
zF17 (z, z) + zFp 1 (z, z) zF173(z, z) + zFp3(z, z) F~2(z, z) + Fp" (z, z)
0
0 1 2 0 0
0 0 1 2
zFp3(z,z) zFp,.(z, z) Fp 1 (z, z) Fp,(z,z) zF172(z, z) zF~3(z, z) F1 0 (z, z) zzF0 (z, z)
zzFp,. (z, z) ~fP1 (z, z) zzFp2(z,z) zFp3(z, z) zFo(z, z) F17 2(z, z)
zF173(z,z) F1 0 (z, z)
:_F.(z, Z~- zF,, (z, ~)] zF172(z, z)- Fp2(z, z) Fo3(Z, z)- Fp3(z, z)
F1 0 (z, z)- zFp4 (z, z)
F •' ( z, z) + F,, ( z, z) ] F17 (z, z) + Fp3 (z, z) F17 2(z, z) + Fp 4 (z, z) F1 0 (z, z) + Fp2(z, z)
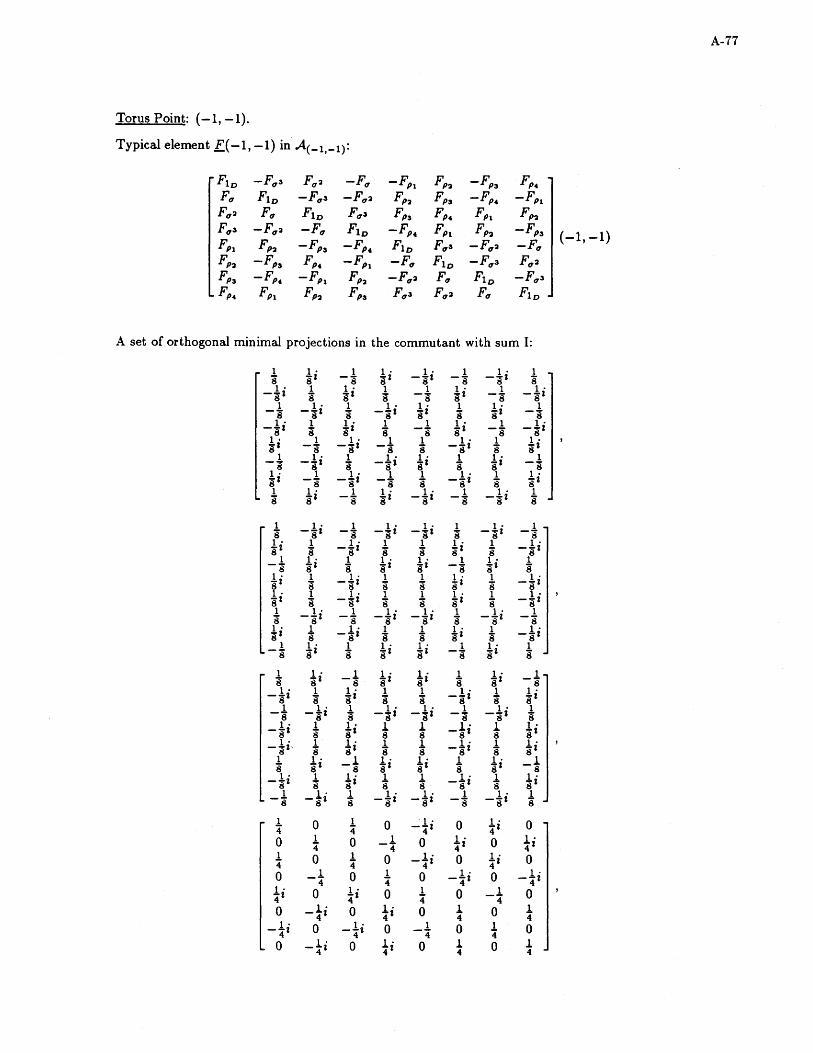
A-77
Torus Point: (-1,-1).
Typical element F( -1, -1) in A(-l,-l):
Flo -F~3 F~, -F~ -FP• Fp, -FP3 Fp,. F~ Flo -F~3 -F~, Fp, FP3 -Fp,. -Fp. F~, F~ Flo F~3 FP3 Fp,. Fp• Fp, F~3 -F~, -F~ Flo -Fp,. FP• Fp, -FP3 (-1, -1) Fp. Fp, -Fp3 -Fp,. Flo F~3 -F~, -F~ Fp, -FP3 Fp,. -FPt -F~ Flo -F~3 F~,
FP3 -Fp,. -FPt Fp, -F~, F~ Flo -F~3 Fp,. FPl FP2 Fp3 F~3 F~, F~ Flo
A set of orthogonal minimal projections in the commutant with sum I:
1 1 • 1 1 . 1 . 1 1 • 1 8 81 -8 81 -81 -8 -81 8 1 . 1 1 • 1 1 1 . 1 1 .
-81 8 81 8 -8 81 -8 -81 1 1 • 1 1 . 1 • 1 1 . 1
-8 -81 8 -8z 8~ 8 8~ -8 1 • 1 1 . 1 1 1 • 1 1 .
-81 8 8~ 8 -8 8' -8 -81 1 • 1 1 • 1 1 1 . 1 1 • 8' -8 -8z -8 8 -8z 8 8'
1 1 . 1 1 . 1 . 1 1 . 1 -8 -8z 8 -8z 8' 8 8' -8 1 . 1 1 . 1 1 1 . 1 1 . 8' -8 -8z -8 8 -8z 8 8~ 1 1 . 1 1 . 1 . 1 1 . 1 8 8' -8 8' -8z -8 -8z 8
1 1 . 1 1 . 1 . 1 1 . 1 8 -8z -8 -81 -8z 8 -8z -8 1 . 1 1 . 1 1 1 . 1 1 . 8' 8 -8z 8 8 8' 8 -8z
1 1 . 1 1 . 1 . 1 1 . 1 -8 8' 8 8' 8' -8 8' 8 1 . 1 1 . 1 1 1 . 1 1 . 8' 8 -8z 8 8 8' 8 -8z 1 . 1 1 . 1 1 1 . 1 1 • 8' 8 -8z 8 8 8' 8 -8z 1 1 . 1 1 . 1 . 1 1 . 1 8 -8z -8 -8z -8z 8 -8z -8 1 . 1 1 • 1 1 1 . 1 1 . 8' 8 -8z 8 8 8' 8 -8z
1 1 . 1 1 . 1 . 1 1 . 1 -8 8' 8 8' 8~ -8 8' 8
1 1 • -l 1 • 1 . 1 1 . -i 8 8' 8' 8' 8 8' 1. 1 1 • 1 1 1 • 1 1 .
-8z 8 8~ 8 8 -8z 8 8~ 1 1 . 1 1 . 1 . 1 1 . 1 -8 -81 8 -81 -8z -8 -81 8 1 . 1 1 . 1 1 1 • 1 1 .
-81 8 8' 8 8 -81 8 81 1 . 1 1 . 1 1 1 . 1 1 .
-81' 8 8' 8 8 -81 8 8' 1 1 . 1 1 . 1 . 1 1 . 1 8 81 -8 81 81 8 81 -8 1 . 1 1 . 1 1 1 . 1 1 .
-81 8 81 8 8 -81 8 81 1 1 . 1 1 . 1 . 1 1 . 1 -8 -81 8 -8z -81 -8 -81 8
1 0 1 0 1 . 0 1 . 0 4 4 -41 41 0 1 0 _1 0 1 • 0 1 •
4 4 4' 4' 1 0 1 0 1 . 0 1 . 0 4 4 -41 41 0 _1 0 1 0 1 .
0 1 .
4 4 -41 -41 1 .
0 1 . 0 1 0 1 0 4' 41 4 -4 0 -ti 0 1• 0 1 0 1
4' 4 4 1 . 0 1 . 0 1 0 1 0 -4z -41 -4 4
0 1 . 0 1• 0 1 0 1 -41 4' 4 4

A-78
t 1 • 1 1 • 1 . 1 1 • 1 -g% -i -g% g% -s g% i 1 • 1 1 • 1 1 1 • 1 1 • i% i -i% i -i -i% -i gZ
1 1 . 1 1 . 1 . 1 1 . 1 -s g% 8 g% -gl i -g% -s 1 . 1 1 . 1 1 1 . 1 1 . g% i -gl i -s -gl -s g% 1 . 1 1 . 1 1 1 . 1 1 . ' -~% -i 81 -~ i Jl i -wz 1 1 . 1 1 . 1. 1 1 . 1 -s g% i gl -g% i -g% -i 1 . 1 1 . 1 1 1 . 1 1 . -wz -~ Jl -~ i Jl i -g% 1 1 . 1 1 . 1 . 1 1 . 1 i -sl -s -g% 81 -8 8% 8 1 0 1 0 1 . 0 1 . 0 4 4 41 -4% 0 1 0 1 0 1 . 0 1 .
4 -4 -41 -41 1 0 1 0 1 . 0 1 . 0 4 4 41 -41 0 -t 0 1 0 1 . 0 1 •
4 4' 4% 1 . 0 1 . 0 1 0 1 0 -41 -4% 4 -4
0 1 . 0 1 . 0 1 0 1 41 -41 4 4 1 . 0 1 . 0 1 0 1 0 4' 4' -4 4 0 1 . 0 1 . 0 1 0 1
4' ..;..4z 4 4
Change of basis used to block diagonalize Ac _1,-1) with respect to these projections:
121 121 121 1 0 121 1 0 4 4 4 2 4 2
-t2!i 12!i -t2!i 0 1 12!i 0 1 4 2 4 2
-!2; -!2; -t2! 1 0 -!2; 1 0 2 2 -t2!i 12!i 121 . 0 1 121i 0 1
4 -4 ~% -2 4 -2 12!i 12!i -t2!i 1 . 0 -t2!i 1 . 0 4 4 2% -2% -!2; 12! 12! 0 1 • -!2; 0 1 .
4 4 -21 2z 12!i 121 . -t2!i 1 . 0 121 . 1 • 0 4 4 ., z -2z -4 "z 2' 12! -!2; -!2; 0 1 . 12! 0 1 . 4 -21 4 2'
Projection 6 is equivalent to 4
Lifted Re12resentations for C*(p4mg) at ( -1, -1):
rrt-1.-1)(F) =Fp4 (-1, -1)- F11,(-1, -1) + Ft0 (-1, -1)- Fp,(-1, -1)
+ Fa3( -1, -1)i + F11 ( -1, -1)i- Fp 1 ( -1, -1)i- Fp3( -1, -1)i
IIf_ 1,-1)(.E) =F10 ( -1, -1)- F113( -1, -1)i- F112( -1, -1)- F11 ( -1, -l)i
- Fp1 ( -1, -1)i + Fp,( -1, -1)- Fp3( -1, -1)i- Fp 4 ( -1, -1)
II( -1,-l)(F) =F10 ( -1, -1) + Fa3( -1, -1)i- Fa,( -1, -1) + F11 ( -1, -1)i
+ Fp1(-1, -1)i + Fp,(-1, -1) + Fp3(-1, -1)i- Fp4 (-1, -1)
II(_ 1,- 1)(F) =Fp4 (-1, -1)- Fa,{-1, -1) + F10{-1, -1)- Fp,(-1, -1)
- Fq3( -1, -1)i- Fl1( -1, -1)i + FP1 ( -1, -1)i + Fp3( -1, -1)i
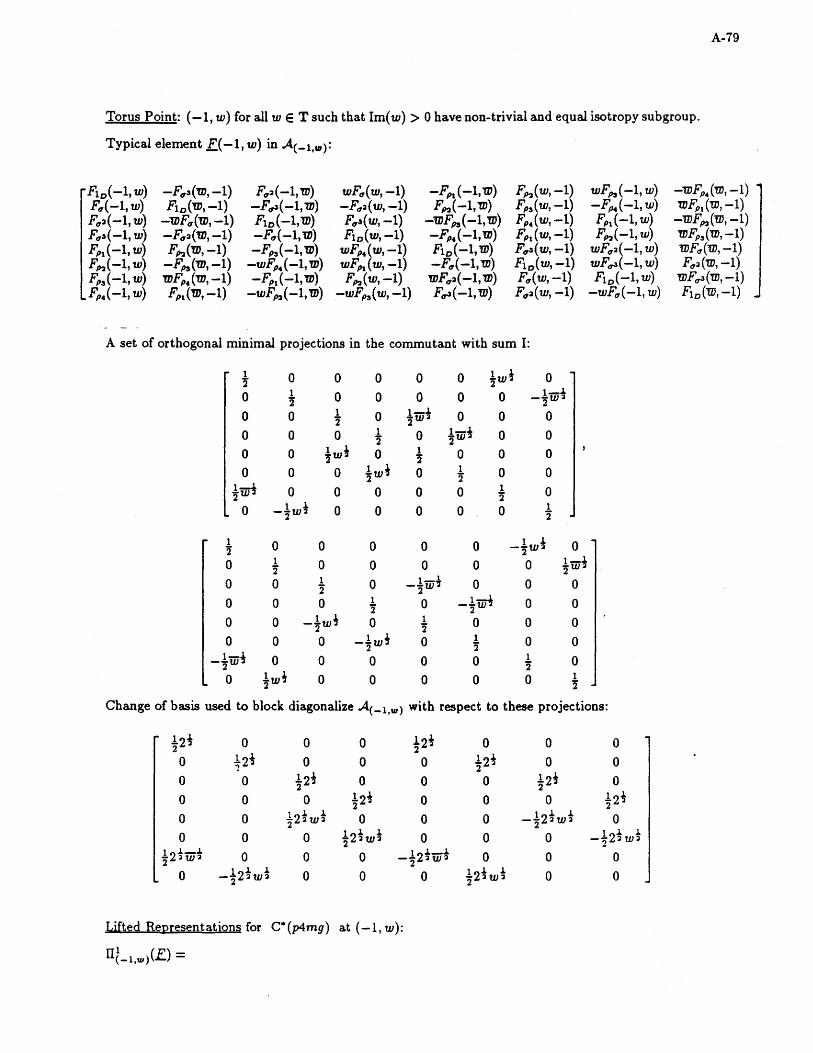
A-79
Torus Point: ( -1, w) for all w E T such that Im( w) > 0 have non-trivial and equal isotropy subgroup.
Typical element F( -1, w) in .A(-l,w):
-F6~(-m, -1) Ft0 (lD,-1)
-lDF6(lD, -1) -F62(m,-l) FP2(lD,-1}
-FPs(lD, -1} TDFp4 (TD, -1) Fp1 (m,-1)
F62(-1,TD) -F~(-1,TD) Ft0 (-l,-1D) -F6(-1,1D) -Fp3 ( -1, 1D)
-wFp4 ( -1, 1D) -Fp1 ( -1, -m)
-wFP2( -1, 1D)
wF6(w,-1) -F62(w,-1) F6,(w,-1) Ft0 (w,-1)
wFp4 (w,-1) wFPt(w, -1) Fh(w,-1)
-wFp3 ( w, -1)
A set of orthogonal minimal projections in the commutant with sum 1:
1 0 0 0 0 0 1w! 0 2 2
0 1 0 0 0 0 0 1-.l. 2 -2W2
0 0 1 0 1-; 0 0 0 2 2w 0 0 0 1 0 1-; 0 0 2 2w 0 0 .!.w1 0 1 0 0 0 2 2 0 0 0 .!.w! 0 1 0 0 2 2
.!.U}i 0 0 0 0 0 1 0 2 2 0 -!w! 0 0 0 0 0 1
2
1 0 0 0 0 0 1 J. 0 2 -2W2 0 1 0 0 0 0 0 1-.l
2 2W2
0 0 1 0 1-1 0 0 0 2 -2w 0 0 0 1 0 -!w1 0 0 2 0 0 -!w1 0 1 0 0 0 2 0 0 0 -!w1 0 1 0 0 2 1-; 0 0 0 0 0 1 0 -2w 2 0 .!.w1 0 0 0 0 0 1
2 2
wFp3 (-1,w) -Fp4 (-1,w) Fp1 (-1,w) FP2(-1,w)
wF62(-1,w) wFcr1( -1, w) F10 (-1,w)
-wF6 (-1,w)
Change of basis used to block diagonalize .A(-l,w) with respect to these projections:
.!.2-i 2 0 0 0 .!.2-i
2 0 0 0
0 ~2; 0 0 0 .!.2-i 2 0 0
0 0 12-i 2 0 0 0 12-i
2 0
0 0 0 12-i 2 0 0 0 !2;
2
0 0 1 J. J. 222W2 0 0 0 1 J. J. -222W2 0
0 0 0 1 J. J. 222W2 0 0 0 1 J. J. -222 W2 12~w~ 2 0 0 0 121-.l. -2 2W2 0 0 0
0 1 J. J. -222W2 0 0 0 1 J. J. 222W2 0 0
Li(t~d Re12Ie~~n tat iQD~ for C*(p4mg) at ( -1, w):
rrt -l,w) (.E) =
-lDFp4 (lD, -1) lDFp1 (m,-1)
-1DFP2(1D, -1) 1DFp3 (1D, -1) lDF~(lD, -1) F~2(TD, -1)
TDF~.l(TD, -1) Ft0 (UJ,-1)
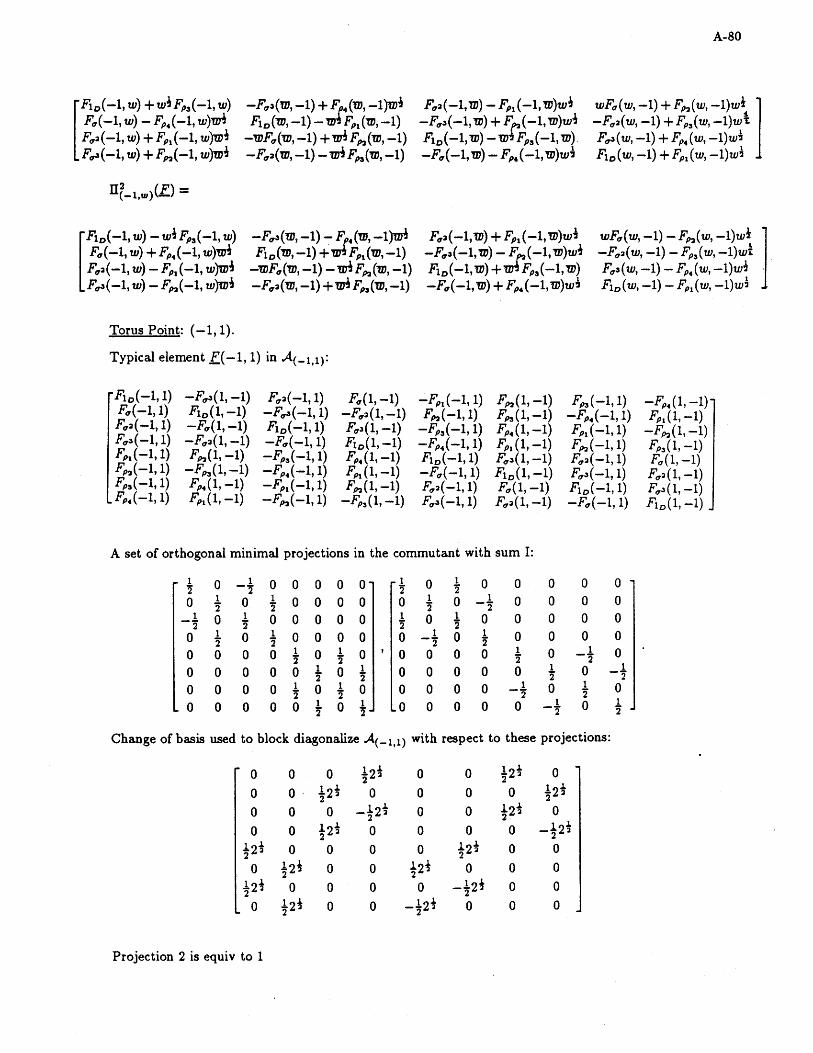
A-80
FC7(-1,w)- Fp4 (-1,w)~ Ft0 (m,-1) -lD~Fp1 (m,-1) -FC7,(-1,lD) +Ffj(-1,lD)wi -FC7,(w, -1) +Fp3 (w, -1)wL
[
F10(-1, w) +wiFp3 ( -1, w) -FC73(tD,-1) +Fp4 (1D, -1)mi Fe1,( -1,1D)- Fp1 ( -1, lD)wi wFe1(w, -1) + Fp,(w, -1)wt~ l FC7,( -1, w) + Fp1(-1, w)mi -lDFC7(lD,-1) +~FP2(lD, -1) Ft0 (-1, lD} -lD Fp3 ( -1, w). F~(w, -1) + Fp4 (w, -1)w! F~(-1,w) +FP2(-1, w)mi -FC7,(m,-1) -~Fp,(lD,-1) -FC7(-1, lD} -Fp4 (-1,1D)wi Ft0 (w, -1) + Fp1(w, -1)w!
FC7(-1, w) +Fp4 (-1, w)lDi Ft0 (1D,-1) +~Fp1 (1D,-1) -FC7,(-1, lD)- Fp,(-1, lD)w! -FC1,(w, -1)- Fp,(w, -1)wl
[
F10( -1, w)- w! Fp3 ( -1, w) -FC7,(1D, -1)- Fp4 {lD, -1}1Di Fe1,( -1, lD) + Fp1 ( -1, lD)w! wFe1( w, -1)- F p,( w, -l)w~ l Fe12(-1, w)- Fp1 (-1, w)mi -lDFC7(1D,-1) -~FP2(1D, -1) F10(-1, lD) +~Fp3(-1;m) Fe1"(w, -1)- Fp4 (w, -1)w! · F~( -1, w) -Fp,(-1, w)lDi -FC7,(tD, -1) +-miFp3 (1D,-1) -Fe1( -1, lD) +Fp4 (-1,1D)wi Ft 0 (w, -1)- Fp1(w, -1)wi
Torus Point: ( -1, 1).
Typical element F( -1, 1) in A(-l,l):
Ft0 (-1, 1) -FC73(l, -1) FC7,(-1, 1) Fe1(1, -1) -Fp1(-1, 1) Fp,(1, -1) Fp,( -1, 1) -Fp4 (1, -1) Fe1(-1, 1) Ft0 (1, -1) -Fe1"( -1, 1) -Fe12(1, -1) FP2( -1, 1) Fp,(1, -1) -Fp4 ( -1, 1) Fp1 (1, -1) F(72(-1, 1) -Fe1(1, -1) Ft0 (-1, 1) Fe13(1, -1) -Fp,(-1, 1) Fp4 (1, -1) Fp1 ( -1, 1) -FP2(1, -1) Fe1"( -1, 1) -FC7,(1, -1) -FC7(-1, 1) Ft0 (1,-1) -Fp4 (-l, 1) Fp1 (1, -1) FP2( -1, 1) Fp,(1, -1) Fp1 ( -1, 1) Fp,(1, -1) -Fp3 (-1, 1) Fp4 (1, -1) Ft0 (-1, 1) FC7,(1, -1) FC7,( -1, 1) Fe1(1, -1) Fp,( -1, 1) -Fp3 (1, -1) -Fp4 (-1, 1) FPl (1, -1) -Fe1( -1, 1) Ft0 (1, -1) Fe1"( -1, 1) Fe12(1, -1) Fp3 (-1, 1) Fp4 (1, -1) -Fp1(-1, 1) FP2(1, -1) FC7,( -1, 1) Fe1(1, -1) Ft0 ( -1, 1) FC73(1, -1) Fp4 ( -1, 1) Fp1 (1, -1) -Fp,(-1,1) -Fp,(1, -1) Fe1"( -1, 1) FC7,(1, -1) -Fe1( -1, 1) Ft0 (1, -1)
A set of orthogonal minimal projections in the commutant with sum 1:
1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 0 2 -2 2 2 0 1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 2 2 2 -2
1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 0 -2 2 2 2 0 1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 2 2 -2 2 0 0 0 0 1 0 1 0 ' 0 0 0 0 1 0 1 0 2 2 2 -2 0 0 0 0 0 l 0 1 0 0 0 0 0 1 0 1
2 2 2 -2 0 0 0 0 1 0 1 0 0 0 0 0 1 0 1 0 2 2 -2 2 0 0 0 0 0 1 0 1 0 0 0 0 0 1 0 1
2 2 -2 2
Change of basis used to block diagonalize .A(-l,l) with respect to these projections:
0 0 0 121 0 0 121 0 2 2
0 0· 121 0 0 0 0 121 2 2
0 0 0 -!21 0 0 12.1 0 2 ,
0 0 12.1 0 0 0 0 -!21 2 ,
12.1 2 , 0 0 0 0 12.1 2 , 0 0
0 121 2 0 0 121
2 0 0 0
121 2 0 0 0 0 -t21 0 0
0 121 2 0 0 -t21 0 0 0
Projection 2 is equiv to 1
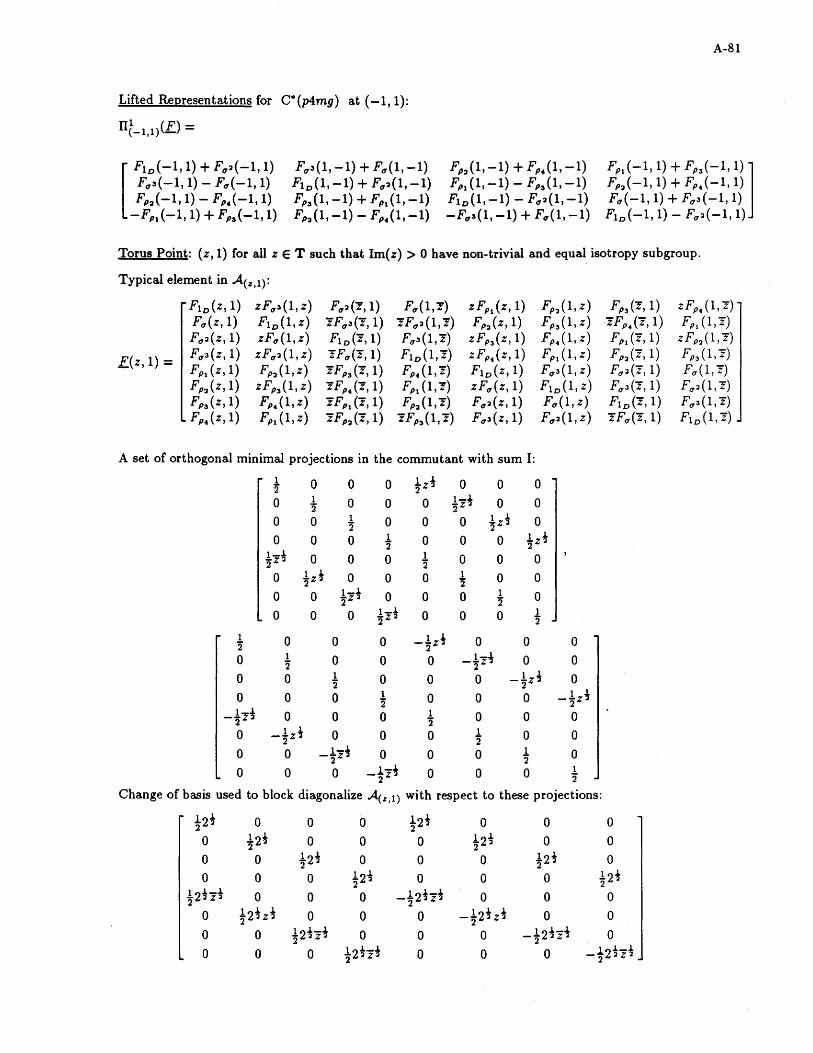
Lifted Representations for C*(p4mg) at ( -1, 1):
II(-l,l)(F) =
Fq3(1, -1) + F()'(1, -1) F1 0 (1, -1) + F()',(1, -1) Fp3(1,-1) + Fp1 (1,-1) Fp,(l,-1)- Fp4 (1,-1)
A-81
Torus Point: (z, 1) for all z E T such that Im(z) > 0 have non-trivial and equal isotropy subgroup.
Typical element in A(z,l):
F10 (z, I) zFq3(I, z) F()',(Y, I) F()'(1,z) zFp1 (z,1) Fp,(I, z) Fp3(Y, I) zFP• (1, z) F()'(z,1) F1 0 (1,z) zFq3(z, 1) zF()',(1, z) Fp,(z, I) Fp3(1,z) zFp.(z, 1) Fp
1 (1, z)
Fql(Z, 1) zF0'(1,z) F1 0 (z, 1) Fu3{1, z) zFp3 (z, 1) Fp4(1,z) Fp 1 (z, 1) zFp2 (1, z)
F(z, 1) = Fu3(z, I) zFu2(1, z) zFu(z, 1) F1 0 (1,z) zFp4 (z, 1) Fp 1 (1, z) Fp2 (z, 1) Fp3 (1, z) Fp1 (z, 1) Fp,(1, z) zFp3 (z, 1) Fp. (1, z) F10 (z, 1) Fu3{1,z) Fu:z(z, 1) Fu(1, z) Fp,(z, 1) zFp3 (1, z) zFp.(z, 1) Fp1 (1, z) zFu(z, 1) F1 0 (1,z) Fu3(z, 1) Fu:z(1, z) Fp3 (z, 1) Fp4 (1, z) zFp 1 (z, 1) Fp,(l, z) Fu,(z, 1) Fu(1,z) F10 (z, 1) Fu3(1, z) Fp,. (z, 1) Fp 1 (1,z) zFp,(z, 1) zFp3 (1, z) Fu3(Z, 1) Fu,(1,z) zFu(z, 1) F1 0 (1, z)
A set of orthogonal minimal projections in the commutant with sum I:
1 0 0 0 1z1 0 0 0 2 2
0 1 0 0 0 1-1 0 0 2 2% 0 0 1 0 0 0 1z1 0 2 2 0 0 0 1 0 0 0 1z1 2 2
1-.l 0 0 0 1 0 0 0 2%2 2 0 1z1 0 0 0 1 0 0 2 2 0 0 1-.l 0 0 0 1 0 2Zl 2 0 0 0 1-.l. 0 0 0 1 2z2 2
1 0 0 0 -!z! 0 0 0 2 0 1 0 0 0 1-~ 0 0 2 -2z 0 0 1 0 0 0
1 1 0 2 -2z' 0 0 0 1 0 0 0 -!z! 2
-j:z! 0 0 0 1 0 0 0 2 0 -!z! 0 0 0 1 0 0 2 0 0 1-.l. 0 0 0 1 0 -2Zl 2 0 0 0 1-1 0 0 0 1 -2z 2
Change of basis used to block diagonalize A(z,l) with respect to these projections:
l2.l 2 2 0 0 0 121 2 0 0 0
0 121 2 0 0 0 121
2 0 0
0 0 121 2 0 0 0 121
2 0
0 0 0 121 2 0 0 0 121
2 12.l.-.l. 2 2%2 0 0 0 121-.l. - 2 z2 0 0 0
0 !21z1 0 0 0 -!21z1 0 0
0 0 12.l.-.l. 2 2%2 0 0 0 12.1-.l. -2 :zz2 0
0 0 0 12.1-.l 2 2Z2 0 0 0 12.l.-.l. -2 2%2

A-82
Lifted Representations for C*(p4mg) at (z, 1):
ntz,l)(F) =
[
Ft 0 (z, 1) + z~ Fp1 (z, 1) F(T(z, 1) + Fp,(z, 1)zi F(12(z, 1) + z~Fp3 (z, 1) F(13(z, 1) + z~ Fp4 (z, 1)
II~z,l)(F) =
zF(13(1,z)+Fp,(1,z)z~ F(1,(z,1)+Fp3 (z,1)z~ F(1(1,z)+z1Fp.(1,z) l Ft 0 (1, z) + Fp3 (1, z)z~ zF(13(z, 1) + -zi Fp.(z, 1) zF(1,(1, z) + Fp 1 (1, z)z1' zF(1(1, z) + Fp4 (1, z)z~ F10 (z, 1) + Fp 1 (z, 1)z1 F()'3(1, z) + z! Fp,(1, z) zF()'2(1, z) + Fp 1 (1, z)zi zFO'(z, 1) + Fp,(z, 1)z1 Ft0 (1, z) + Fp3 (1, z)zi
[
F10 (z, 1)- z1 Fp 1 (z, 1) zF()'3(1, z)- Fp, (1, z)zi FO',(z, 1)- Fp3(z, 1)z! F(1(1, z)- z1 Fp. (1, z) l F()'(z, 1)- Fp,(z, 1)z1 F10(1, z)- Fp
3(1, z)z! zF(13(z, 1)- -zi Fp.(z, 1) zF()'2(1, z)- Fp
1 (1, z)'zi
F(12(z, 1)- z1 Fp3 (z, 1) zF()'(1, z)- Fp. (1, z )z!- F10 (z, 1) - Fp 1 (z, 1)z! F()'3(1, z) - z1 Fp2 (1, z) F(13(z, 1)- z! Fp4 (z, 1) zF()'2(1, z)- Fp
1 (1, z)z! zF()'(z, 1) - Fp,(z, 1 )z-1 F10 ( 1, z) - Fp3 (1, z)z1
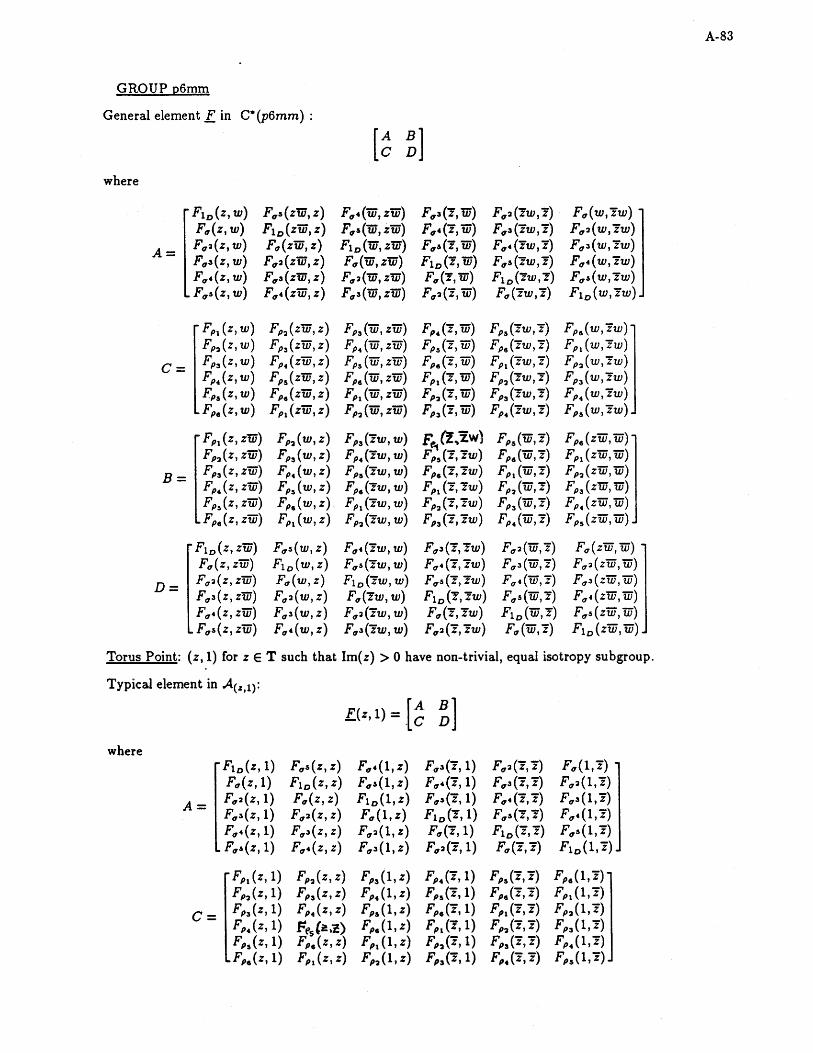
GROUP p6mm
General element Fin C*(p6mm) :
where
A=
C=
B=
D=
F10 (z, w) Ft~(z, w) Ft~l(z, w) Ft~.s(z, w) Ft7c(z, w) Ft7s(z, w)
Fp1 (z, w) Fp,(z, w) Fp,(z, w) Fp4 (z, w) Fp,(z, w) Fp.(z, w)
Fp1 (z, zw) Fp,(z, zw) Fp,(z,zw) Fp4 (z, zw) Fp,(z, zw) Fp.(z, zw)
F1 0 (z, zw) Ft1(z, zw) Ft12(z, zw) Ft1.s(z, zw) Ft7c(z, zw) Ft1s(z, zw)
Ft1s(zw,z) F1 0 (zw, z) Ft~(zw, z) Ft1,(zw,z) Ft1:s(zw, z) Ft1c(zw, z)
Fp,(zw, z) Fp,(zw, z) Fp.(zw,z) Fp,.(zw, z) Fp.(zw,z) Fp 1 (zw,z)
Fp,(w, z) Fp3 (w, z) Fp.(w, z) Fp,. (w, z) Fp.(w, z) Fp1 (w, z)
Ft7s(w, z) F1 0 (w, z) Ft~(w,z) Ft7,(w,z) Ft~"(w, z) Ft7c(w,z)
Ft1c(w, zw) Ft1s(w,zw) F1 0 ("W,zw) Ft1(w,zw) Ft1,(w,zw) Ft1:s(w,zw)
Fp,(w,zw) Fp.(w,zw) Fp5 (w,zw) Fp.(w,zw) Fp 1 (w,zw) Fp,(w,zw)
Fp,(zw,w) Fp4 (zw,w) Fp5 (zw, w) Fp.(zw, w) Fp 1 (zw, w) Fp,(zw, w)
Ft~•(zw, w) Ft1a(zw, w) F1 0 (zw, w) Ft1(zw, w) Ft1,(zw, w) Ft1.s(zw, w)
Ft1:s(z, w) Ft1c(z, w) Ft1a(z, w) Ft 0 (z,w) Ft1(z, w) Ft7,(z, w)
Fp4 (z, w) Fp 5 (z, w) Fp.(z,w) Fp 1 (z, w) Fp,(z, w) Fp,(z, w)
&. (!,.zw) F:a(z, zw) Fp.(z, zw) FPl (z, zw) Fp,(z,zw) Fp,(z, zw)
Ft~"(z, zw) Ft1c(z, zw) Ft1a(z, zw) F10 (z,zw) Ft1(z, zw) Ft1,(z, zw)
Ft1,(zw,z) · Ft1:s(zw, z) Ft~•(zw, z) Ft1a(zw,z) F10 (zw,z) Ft1(zw, z)
Fp5 (zw,z) Fp.(zw, z) Fp 1 (zw, z) Fp,(zw, z) Fp,(zw, z) Fp.(zw, z)
Fp5 (w,z) Fp.(w, z) Fp 1 (w,z) Fp,(w,z) Fp3 (w, z) Fp.(w,z)
Ft1,(w,z) Ft1,(w,z) Ft1·(w, z) Ft1a(w, z) F1 0 (w,z) Ft1(w,z)
Ft1(w,zw) Ft1,(w,zw) Ft7:s(w, zw) Ft~•(w, zw) Ft1a(w,zw) Ft 0 (w,zw)
Fp.(w,zw) Fp 1 (w,zw) Fp,(w,zw) Fp 3 (w,zw) Fp.(w, zw) Fp 5 (w,zw)
Fp.(zw,w) Fp 1 (zw,w) Fp,(zw,w) Fp3(zw,w) Fp 4 (zw,w) Fp5 (zw,w)
Ft1(zw, w) Ft1,(zw,w) Ft13(zw, w) Ft1·(zw, w) Ft1a(zw, w) Ft 0 (zw,w)
Torus Point: (z, 1) for z E T such that Im(z) > 0 have non-trivial, equal isotropy subgroup.
Typical element in .A(.z,l):
where
A=
C=
Ft 0 (z, 1) Ft7(z,1) Ft12(Z, 1) Ft1:s(z, 1) Ft~•(z, 1) Ft7r.(z,1)
Fp 1 (z, 1) Fp,(z, 1) Fp3 (z, 1) Fp4 (z, 1) Fp,.(z, 1) Fp.(z, 1)
F(z,l)=l~ ~]
Ft~a(z, z) F1 0 (z, z) Ft1(z,z) Ft12(z, z) Ft1,(z, z) Ft~•(z,z)
Fp,(z, z) Fp3 (z, z) Fp4 (z, z) t:es c~ ~i!) Fp.(z, z) Fp 1 (z, z)
Ft~•(1, z) Ft7r.(1, z) Ft 0 (1,z) Ft7(1,z) Ft7,(1,z) Ft7:s(l,z)
Fp3 (1,z) Fp4 (1, z) Fp11 (1,z) Fp.(1, z) Fp1 (1, z) Fp2 (1, z)
Ft1:s(z, 1) Ft1c(z, 1) Ft1,(z, 1) F10(z, 1) Ft1(z, 1) Ft~,(z, 1)
Fp.(z, 1) Fp 11 (z, 1) Fp.(z, 1) Fp 1 (z, 1) Fp,(z, 1) Fp,(z, 1)
Ft7,(z, z) Ft1:s(z, z) Ft7c(z, z) Ft1,(z, z) F10 (z, z) Ft1(z,z)
Fp 11 ('Z, z) Fp.(z, z) Fp1 (z, z) Fp,(z, z) Fp,(z, z) Fp.(z, z)
Ft7(1, z) Ft72(1, z) Ft73(1, z) Ft7·(1, z) Ft7,(1, z) F1 0 (1, z)
Fp.(1, z) Fp 1 (1, z) Fp,(l, z) Fp3 (l, z) Fp.(1,z) Fp11 (1, z)
A-83
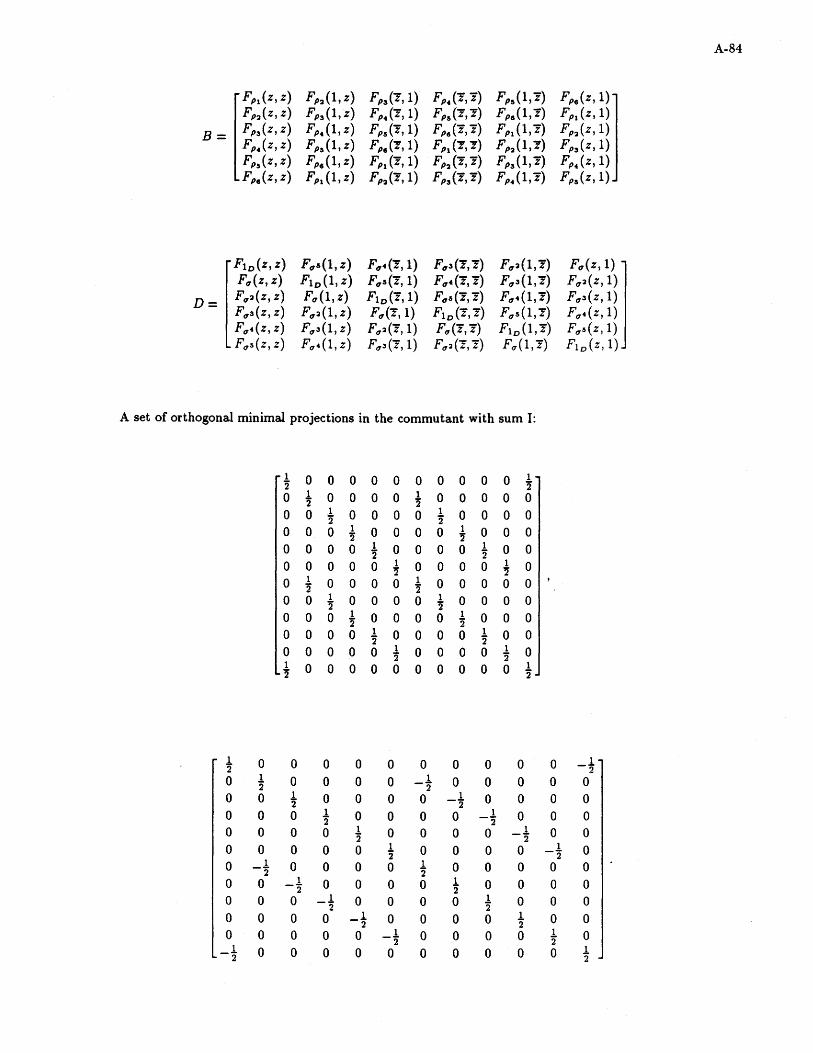
A-84
Fp1 (z,z) Fp2(1, z) Fp3('z, 1) Fp.(z, z) Fp5 (1, 'Z) Fp6 (z, 1) Fp2 (z, z) Fp3(1, z) Fp.(z, 1) Fp5 (z, z) Fp6 (1, z) Fp 1 (z,1)
B= Fp3(z,z) Fp4 (1,z) Fp5 (Z', 1) Fp6 (z, z) Fp 1 (1, z) Fp2 (z, 1) Fp4 (z, z) Fp5 (1,z) Fp6 {'z, 1) Fp1 (z, z) Fp2(1, z) Fp3(z, 1) Fp5 (z, z) Fp6 (1,z) Fp1 (z, 1) Fp2 (z, z) Fp3(1, z) Fp4 (z, 1) Fp6 (z, z) Fp1 (1,z) Fp2 (z, 1) Fp3(z, z) Fp. (1, z) Fp5 (z, 1)
F1 0 (z, z) F0 s{1, z) Fo•(z, 1) Fo3(z, z) F0 2(1, %) Fo(z, 1) F(1(z,z) F10 (1,z) F(1s(z, 1) F(1·(z, z) F(13(1, z) F(12(Z, 1)
D= F(12(z, z) F(1(1,z) F10 ('Z, 1) Fo!!J(z, z) F(1. (1, z) F(13(Z, 1) F(13(z, z) F(12(1,z) F(1(z, 1) F10 (z, z) F(1!!J(1, z) F(1t(Z, 1) F(1•(z, z) F(13(1,z) F(12('Z, 1) F(1(z, z) Ft 0 (1, z) F(15(Z, 1) F(15(z, z) F(1•(1,z) F(13(z, 1) F0 2(z, z) F(1(1, z) Ft 0 (z, 1)
A set of orthogonal minimal projections in the commutant with sum 1:
1 0 0 0 0 0 0 0 0 0 0 1 2 2 0 1 0 0 0 0 1 0 0 0 0 0 2 2 0 0 1 0 0 0 0 1 0 0 0 0 2 2 0 0 0 1 0 0 0 0 1 0 0 0 2 2 0 0 0 0 1 0 0 0 0 1 0 0 2 2 0 0 0 0 0 1 0 0 0 0 1 0 2 2 0 1 0 0 0 0 1 0 0 0 0 0 ' 2 2 0 0 1 0 0 0 0 1 0 0 0 0 2 2 0 0 0 1 0 0 0 0 1 0 0 0 2 2 0 0 0 0 1 0 0 0 0 1 0 0 2 2 0 0 0 0 0 1 0 0 0 0 1 0 2 2 1 0 0 0 0 0 0 0 0 0 0 1 2 2
1 0 0 0 0 0 0 0 0 0 0 1 2 -2 0 1 0 0 0 0 1 0 0 0 0 0 2 -2 0 0 1 0 0 0 0 1 0 0 0 0 2 -2 0 0 0 1 0 0 0 0 1 0 0 0 2 -2 0 0 0 0 ! 0 0 0 0 1 0 0 2 -2 0 0 0 0 0 1 0 0 0 0 1 0 2 -2 0 1 0 0 0 0 1 0 0 0 0 0 -2 2 0 0 1 0 0 0 0 1 0 0 0 0 -2 2 0 0 0 _! 0 0 0 0 1 0 0 0 2 2 0 0 0 0 -t 0 0 0 0 ! 0 0 2 0 0 0 0 0 1 0 0 0 0 1 0 -2 2
_! 0 0 0 0 0 0 0 0 0 0 ! 2 2
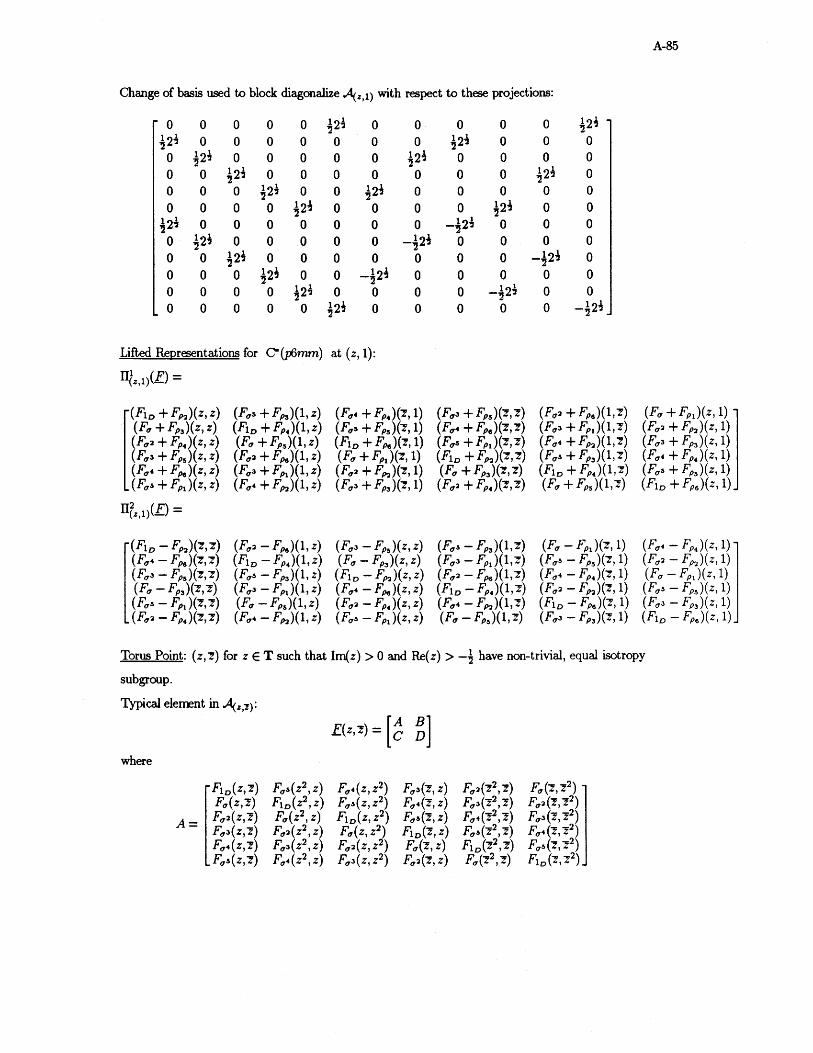
Olange of basis used to block diagonalize A(z,l) with respect to these projections:
0 0 !2~ 0
0 ~2! 0 0 0 0 0 0
~2! 0 0 ~2! 0 0 0 0 0 0 0 0
0 0 0
~2! 0 0 0 0
~2! 0 0 0
0 0 0 0 0
!2! 0 0 0 0
121 '2 .,
0
!2! 0 0 0 0 0 0 0 0 !2! 0 0 0 0 0 0 0 0 0 -~2! 0 0
~2! 0
Lifted Representations for C*(p}mm) at (z, 1):
ntz,l)(.E) =
0 0
121 '2 .,
0 0 0 0
-~2! 0 0 0 0
0
!2! 0 0 0 0 121 -'2 .,
0 0 0 0 0
0 0 0 0 0
~2! 0 0 0 0
-~2! 0
0 0 0
121 '2 .,
0 0 0 0
-~2! 0 0 0
121 '2 "2
0 0 0 0 0 0 0 0 0 0 121 -'2 "2
A-85
(Fq2 + Fp.)(z, z) (Fe1 + Fp6 )(1, z) (F10 + FP6)(2', 1) (Fq& + Fp1 )(2', z) (Fe1• + Fp2 )(1, z) (Fq3 + Fp3 )(z, 1)
[
(Flo+ Fp2)(z, z) (Fq& + Fp3 )(1, z) (Fe1• + Fp4 )(!, 1) (Fq3 + Fp6 )(!, 2') (Fe12 + Fp6 )(1, z) (Fe1 + Fp1 )(z, 1) (Fe1 + Fp3 )(z, z) (F10 + Fp4 )(1, z) (Fq& + Fp6 )(2', 1) (Fe1• + Fp6 )(2', z) (Fq3 + Fp1)(1, z) (Fq2 + F P2)(z, 1)
(Fq3 + Fp5 )(z, z) (Fe12 + F P6)(1, z) (Fe1 + Fp1 )(:, 1) (F10 + Fp2 )(':, ~) (Fq& + Fp3 )(1, z) (Fe1• + Fp.)(z, 1) (Fe1• + FP&)(z, z) (Fq3 + Fp1 )(1, z) (Fq:~ + FP2)(~, 1) (Fe1 + Fp3 )(~, z) (Flo+ Fp4 )(1, z) (Fq& + Fp5 )(z, 1) (Fq& + Fp1 )(z, z) (Fe1• + F P2)(1, z) (Fq3 + Fp3 )(!, 1) (Fq:~ + Fp4 )(2', z) (Fe1 + Fp5 )(1, z) (Flo+ Fp6 )(z, 1)
TI[z,l)(F) =
Torus Point: (z, z) for z E T such that Im(z) > 0 and Re(z) > -! have non-trivial, equal isotropy
subgroup.
Typical elerrent in A(z.~):
where
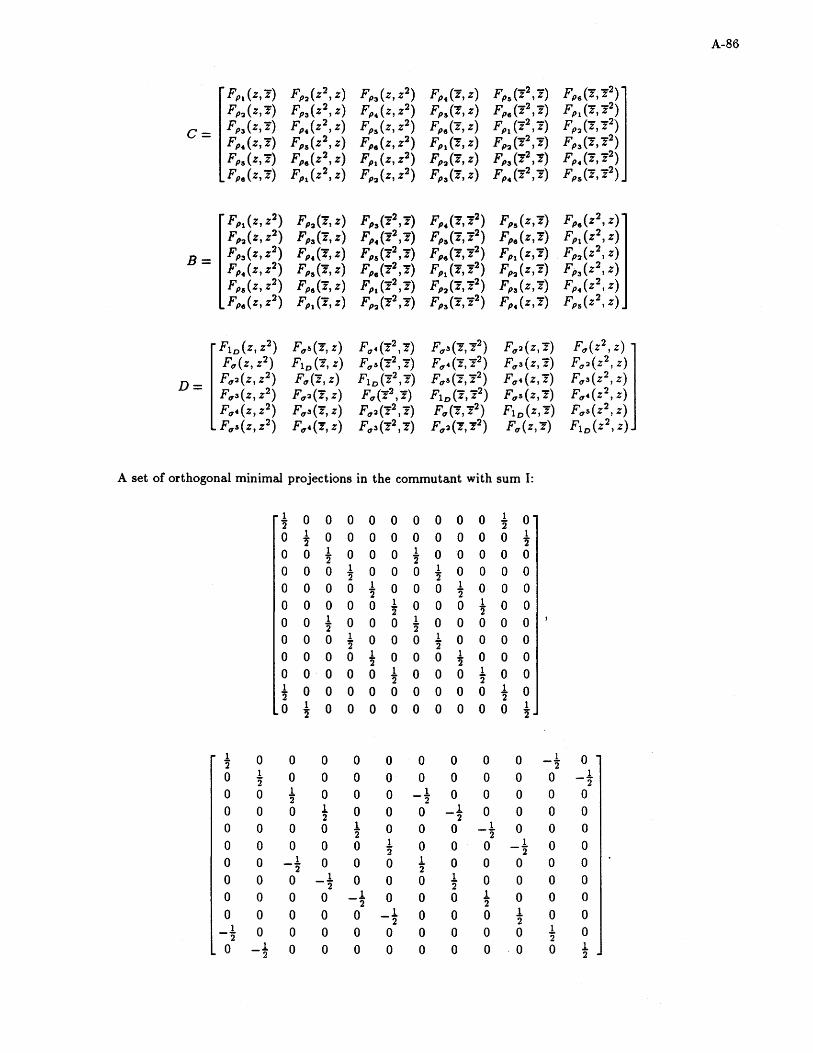
A-86
Fp 1 (z, z) Fp,(z 2 ,z) Fp3 (z, z2 ) Fp4 (z, z) Fp5 (z2 , z) Fp6(z, z-2)
Fp,(z, z) Fp3 (z 2 ,z) Fp4 (z, z2 ) Fp 5 (z, z) Fp6(z2 , z) Fp.(z, z 2)
C= Fp3 (z, z) Fp4 (z 2 , z) FPt>(z, z2) Fp6(z, z) Fp. (z2
, z) Fp,(z, z 2)
Fp4 (z, z) Fp5 (z 2 ,z) Fp6(z, z2 ) Fp 1 (z, z) Fp,(z2 ,z) Fp 3 (z, z2)
Fp5 (z, z) Fp6(z 2 , z) Fp 1 (z, z2 ) Fp,(z, z) Fp3 (z2 ,z) Fp.(z, z 2)
Fp6(z, z) FP• (z2, z) Fp,(z, z2 ) Fp3 (z, z) Fp.(z2 ,z) Fpa(z, z-2)
Fp1 (z, z2 ) Fp,(z, z) Fp3 (z2 ,z) Fp.(z, z 2) Fp5 (z,z) Fp6(z 2 , z)
Fp,(z, z2 ) Fp3 (z, z) Fp4 (z2 ,z) Fpa(z, z-2) Fp6(z,z) Fp1 (z2 , z)
B= Fp3 (z, z2 ) Fp4 (z,z) Fp5 (z2 ,z) Fp6(z, z-2) Fp1 (z, z) Fp,(z2, z)
Fp4 (z, z2 ) Fp5 (z, z) Fp6(z2 ,z) Fp 1 (z, z2) Fp,(z,z) Fp3 (z 2 ,z) Fp5 (z, z 2 ) Fp6(z, z) Fp.(z2 ,z) Fp,(z, z2) Fp3 (z, z) Fp4 (z 2 , z) Fp6(z, z2 ) Fp1 (z, z) Fp,(z2
, z) Fp3 (z, z 2) Fp4 (z,z) Fpt>(z 2
, z)
F1 0 (z, z 2) F(1r.(z, z) F(1.(z2 , z) F(13(z, z2) F(1,(z, z) F(1(z 2 ,z) F(1(z, z 2 ) F1 0 (z, z) F(1r.(z2 , z) F(1·(z, z2) F(13(z, z) F(1-:~(z 2 ,z)
D= Ft12(z, z2 ) F(1(z, z) F1 0 (z2 ,z) F(1s(z, z 2 ) F(1·(z, z) F(1:s(z 2 ,z) F(13(z, z2 ) F(1-:~(z, z) F(1(z2 , z) F1 0 (z, z 2
) F(1r.(z, z) F(1•(z 2 ,z) F(1•(z, z2 ) F(13(z, z) F(1-:~(z2 , z) F(1(z, z2) F1 0 (z, z) F(1r.(z 2 ,z) F(1r.(z, z 2) F(1•(z, z) F(13(z2 , z) F(1,(z, z 2 ) F(1(z, z) Ft 0 (z 2 , z)
A set of orthogonal minimal projections in the commutant with sum I:
1 0 0 0 0 0 0 0 0 0 1 0 2 2 0 1 0 0 0 0 0 0 0 0 0 1
~ ~ 0 0 1 0 0 0 1 0 0 0 0 0 2 2 0 0 0 1 0 0 0 1 0 0 0 0 2 2 0 0 0 0 1 0 0 0 1 0 0 0 2 2 0 0 0 0 0 1 0 0 0 1 0 0 2 2 0 0 1 0 0 0 1 0 0 0 0 0
, 2 2
0 0 0 1 0 0 0 1 0 0 0 0 2 2 0 0 0 0 1 0 0 0 1 0 0 0 2 2 0 0 0 0 0 1 0 0 0 1 0 0 2 2 1 0 0 0 0 0 0 0 0 0 1 0 2 2 0 1 0 0 0 0 0 0 0 0 0 1
2 2
1 0 0 0 0 0 0 0 0 0 1 0 2 -2 0 1 0 0 0 0 0 0 0 0 0 1
2 -2 0 0 1 0 0 0 1 0 0 0 0 0 2 -2 0 0 0 1 0 0 0 1 0 0 0 0 2 -2 0 0 0 0 1 0 0 0 1 0 0 0 2 -2 0 0 0 0 0 1 0 0 0 1 0 0 2 -2 0 0 1 0 0 0 1 0 0 0 0 0 -2 2 0 0 0 1 0 0 0 1 0 0 0 0 -2 2 0 0 0 0 1 0 0 0 1 0 0 0 -2 2 0 0 0 0 0 _1 0 0 0 1 0 0 2 2
1 0 0 0 0 0 0 0 0 0 1 0 -2 2 0 _l 0 0 0 0 0 0 0 .o 0 l
2 2
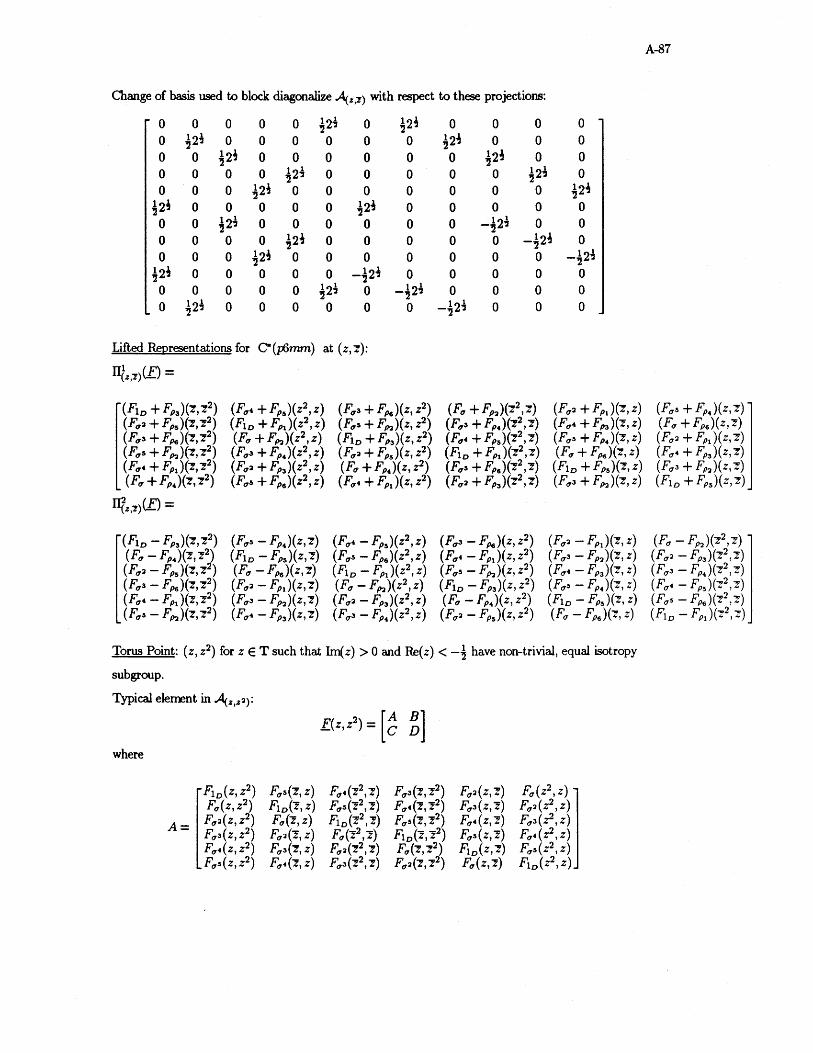
Change of basis used to block diagonalize A(z,::r) with respect to these projections:
0 0 0 0 0 121 0 12~ 0 0 0 0 '2 ., '2 0 ~2! 0 0 0 0 0 0 ~2~ 0 0 0 0 0 12~ 0 0 0 0 0 0 12! 0 0 ~ ~ 0 0 0 0 121 0 0 0 0 0 121 0 ~ ., ~ ., 0 0 0 12! 0 0 0 0 0 0 0 12~ '2 '2
~2! 0 0 0 0 0 ~2! 0 0 0 0 0 0 0 121 0 0 0 0 0 0 121 0 0 ~ ., -~ '2 0 0 0 0 12! 0 0 0 0 0 -~2! 0 '2 0 0 0 12! 0 0 0 0 0 0 0 -~2! '2
~2; 0 0 0 0 0 -~2; 0 0 0 0 0 0 0 0 0 0 121 0 1 1 0 0 0 0 '2 '2 -~2'2 0 12! 0 0 0 0 0 0 1 1 0 0 0 '2 -'22'2
Lifted Representations for G-(p)mm) at (z, -z):
IT(z,::r)(E) =
(F10 + Fp3 )("Z, '%2) (F11• + Fp5 )(z2, z) (F113 + FP&)(z, z2) (Fu + Fp,)('%2, '!) (F11, + Fp1 )('%, z) (F11 , + Fp5 )(-z, ~2 ) (F10 +Fp1 )(z2,z) (F11s + Fp,)(z, z2) ( F113 + Fp4 )(-z2 , -z) (Fu• + Fp3)(!, z) (F113 + FP&)(-z, z2) (Fu +Fp,)(z2,z) (F1 0 + Fp3 )(z, z2) (F11• + Fp5 )(z2, -z) (F11s + Fp4 )(z, z) ( F11s + F p, )('!, '!2) ( F113 + Fp4 )( z2, z) (Fu, + Fp5 )(z, z2) (F1 0 + FpJ('%2, '!) (F11 + FP&)(-z,z) (Fu• + Fp1 )('!, z
2) (Fu, +Fp3 )(z2,z) (Fu + Fp4 )(z, z2) (Fus + Fp6 )(z2, '%) (Ft0 + Fp5 )('%, z) (Fu + Fp4 )('%, '!2) (F11s + Fp6 )(z2, z) (F11• + Fp1)(z,z2) (F11, + Fp3)('!
2 , z) (F113 + Fp,)(-z, z)
Jifz,::r)(E) =
(F1 0 - Fp3 )('!, z2) (F1111- Fp4 )(z, '!) (F11•- Fp5 )(z2, z) (F113- FP&)(z, z2) (F11,- FpJ(-z, z) ( Fu - Fp4 )(z, '%2) (Fto- Fp5 )(z, z) (F115- Fp6 )(z2, z) (F11•- Fp1 )(z, z2) (F113 - Fp,)(z, z) (F11,- Fp5 )('!, -z2) (F11 - Fp6 )(z, z) (Ft0 - Fp1 )(z
2, z) (F115- Fp,)(z, z2) (F11• - Fp3 )(-z, z) ( F173 - F P& )(z, z2) (F11,- Fp1 )(z, z) (F11 - Fp,)(z2 ,z) (F10 - Fp3 )(z, z2) (F115 - Fp4 )('!, z) ( F11• - Fp1 )('!, '%2) (F113- Fp,)(z, '%) (Fu,- Fp3 )(z2, z) (F11 - Fp4 )(z, z2) (Ft0 - Fp5 )(z, z) (Fu5- Fp,)(z,z2) (F11• - Fp3 )(z, z) (F113- Fp4 )(z2, z) (F11, - Fp5 )(z, z2 ) (F11 - Fp6 )(-z, z)
Torus Point: (z, z2) for z E T such that Im(z) > 0 and Re(z) < -! have non-trivial, equal isotropy
subgroup.
Typical elerrent in A(z,z2):
where
A-87
(F11 11 + Fp4 )(z, '!) (F11 + Fp6 )(z, z) (Fu, + Fp1 )(z, z) (F11 • + Fp3 )(z, '!) (Fu3 + Fp,)(z,z) (F1 0 + Fp5)(z, -z)
(F11 -Fp,)(-z2 ,-z) (Fu,- Fp3 )(z2 ,z) (F113 -Fp.)('!2 ,z) (F114 - Fp5)('!2 , z) (Fu5 -Fp6 )(z2 ,z) (Ft 0 -FpJ(:z2,z)
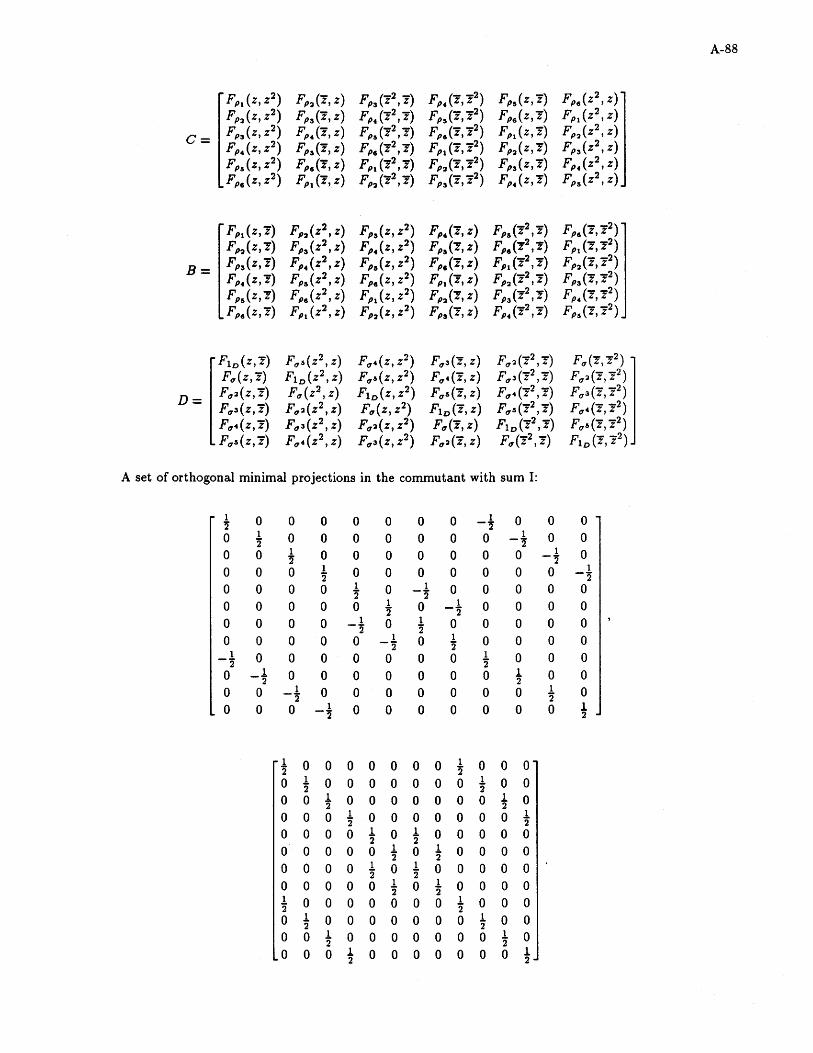
A-88
Fp 1 {z, z2) Fp2(z, z) Fp3(z2, z) Fp.(z, z2) Fp5 (z, z) Fp6 (z2, z) Fp2(z, z2) Fp3(z, z) Fp.(z2
, z) Fps(z, z-2) Fp6(z, z) Fp 1 (z2, z)
C= FP3(z, z2) Fp.(z, z) Fp5 (z2, z) Fp6(z, -z2) FPl {z, z) Fp2 (z2, z) Fp4 (z, z2) Fp 5 (z, z) Fp6 (z2 , z) Fpl(z, -z2) Fp2(z, z) Fp3(z2, z) Fp5 (Z, z2) Fp6 (z, z) Fp 1 (z2, z) Fp2(z, -z2) Fp3(z, z) Fp 4 (z2, z) Fp6 (z, z2) Fp 1 (z, z) Fp2(z2, z) Fp3(z, -z2) FP• (z, z) Fp5 (z2, z)
Fp1 (z, z) Fp,(z2, z) Fp3(z, z2) Fp4 (z, z) Fp5 (z2,z) Fp.(z, z2) Fp,(z, l') Fp3(z2, z) Fp4 (z,z2) Fp5 (l', z) Fp.(z2
, Y) FPl (z, z2)
B= Fp3(z, z) Fp4 (z2, z) Fp5 (z, z2) Fp6 (z, z) Fpl(z-2, z) Fp2(z, z-2) Fp4 (z, z) Fp5 (z2 , z) Fp6 (z, z2) Fp1 (z, z) Fp,(z2,z) Fp3(z, -z2) Fp5 (z, z) Fp6 (z2 , z) FPl (z, z2) Fp,(z, z) Fp3(z2, Y) Fp,.(z, z
2) Fp6 (z, z) Fp 1 (z2, z) Fp,(z, z2) Fp3(z, z) Fp,.(z2
, z) Fpa(z, -z2)
F10 (z, z) F11 a(z2, z) F11.(z, z2) F113(z, z) F11,("z2, z) F11 (z, z2 )
F11(z, z) F1 0 {z2,z) F11a(z, z2) F11•(z, z) F113(z2, z) F11 2(z, z
2 )
D= F11,(z, z) F11 (z2, z) F10 (z, z2) F11a(z, z) F11• (z2
, z) F113(z, z2) F113(z, z) F112(z2, z) F11 (z, z2) F10 (z, z) F11a(z2 , z) Fq·(z, z 2 )
F11•(z, z) F11 3(z2, z) F112(z, z2) F11 (z, z) F1 0 (z2, z) F11a(z, z2) F11a(z, z) F11•(z2, z) F113(z, z2) F11,(z, z) F11(z2
, z) F1 0 (z, z2)
A set of orthogonal minimal projections in the commutant with sum I:
1 0 0 0 0 0 0 0 1 0 0 0 2 -2 0 1 0 0 0 0 0 0 0 1 0 0 2 -2 0 0 1 0 0 0 0 0 0 0 1 0 2 -2 0 0 0 1 0 0 0 0 0 0 0 1
2 -2 0 0 0 0 1 0 1 0 0 0 0 0 2 -2 0 0 0 0 0 1 0 1 0 0 0 0 2 -2 0 0 0 0 1 0 1 0 0 0 0 0 -2 2 0 0 0 0 0 1 0 1 0 0 0 0 -2 2
1 0 0 0 0 0 0 0 1 0 0 0 -2 2 0 1 0 0 0 0 0 0 0 1 0 0 -2 2 0 0 1 0 0 0 0 0 0 0 1 0 -2 2 0 0 0 1 0 0 0 0 0 0 0 1
-2 2
1 0 0 0 0 0 0 0 1 0 0 0 2 2 0 1 0 0 0 0 0 0 0 1 0 0 2 2 0 0 ..!. 0 0 0 0 0 0 0 1 0 2 2 0 0 0 1 0 0 0 0 0 0 0 1
2 2 0 0 0 0 ..!. 0 1 0 0 0 0 0 2 2 0 0 0 0 0 ..!. 0 1 0 0 0 0
2 2 0 0 0 0 1 0 1 0 0 0 0 0 2 2 0 0 0 0 0 1 0 1 0 0 0 0 2 2 1 0 0 0 0 0 0 0 1 0 0 0 2 2 0 ..!. 0 0 0 0 0 0 0 ..!. 0 0 2 2 0 0 1 0 0 0 0 0 0 0 1 0 2 2 0 0 0 ..!. 0 0 0 0 0 0 0 1
2 2
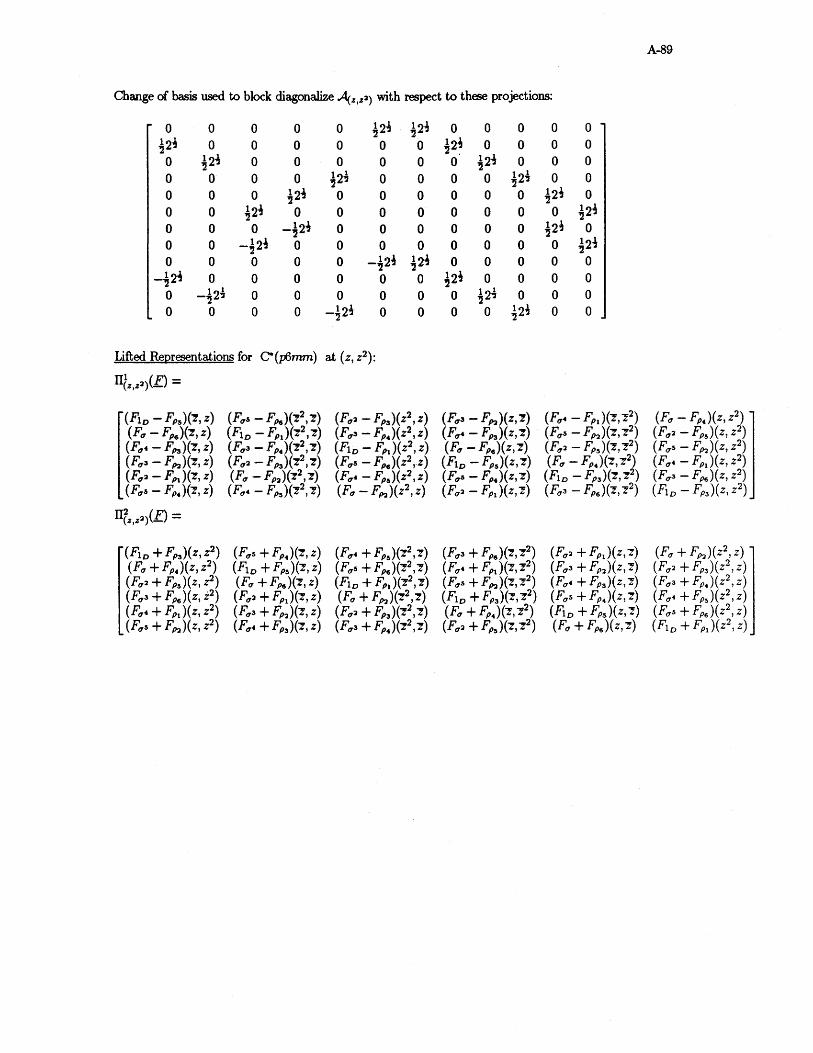
A-89
Change of basis used to block diagonalize A(z,z::l) with respect to these projections:
0 0 0 0 0 12! 121 0 0 0 0 0 ~ ~ ~
121 0 0 0 0 0 0 12! 0 0 0 0 ~ ~ ~ . 0 12! 0 0 0 0 0 0 12! 0 0 0
~ ~ 0 0 0 0 121 0 0 0 0 121 0 0 ~ ~ ~ ~
0 0 0 12! 0 0 0 0 0 0 121 0 ~ ~
0 0 ~21 0 0 0 0 0 0 0 0 ~2; 0 0 0 -~21 0 0 0 0 0 0 121 0 ~ 0 0 -~21 0 0 0 0 0 0 0 0 121
~
0 0 0 0 0 -~21 12! 0 0 0 0 0 ~
-~2; 0 0 0 0 0 0 ~21 0 0 0 0 0 1 1 0 0 0 0 0 0 121 0 0 0 -~2~ ~ ., 0 0 0 0 -~2; 0 0 0 0 12!
~ 0 0
Lifted ReQresentations for C"(]X)mm) at (z, z2):
11{z,z::li.E) =
(Flo- Fp5 )(l', z) (FO's - F P6)('!2,l') (FO'::a- Fp3 )(z2 , z) ( FO':s - F P'l )( z, '!) (FO'•- Fp1 )(l', '!2) (FO'- Fp4 )(z, z2)
(FO'- Fp6 )(%, z) (F1 0 - Fp1)(!2 , -:) (FO':s - Fp4 )(z2, z) (FO' .. - Fp3 )(z, -:) (FO's - Fp:~)(-:, -:2) (FO'::a- Fp5 )(z, z2)
(FO' .. - FP3)(l', z) (FO':s - Fp4 )(l'2, '!) (Flo- Fp1 )(z2, z) (FO'- Fp6 )(z, '!) (FO'::a - Fps)(l', '!2) (FO's- FP'l)(z, z2) ( FO':s - F P'l )('%, z) (FO'::a - Fp;s)(-:2 I'%) (FO's- Fp6 )(z2 ,z) (Flo- Fp5 )(z, '%) (FO' - Fp .. )(-:, '!2) (FO' .. - FpJ(z, z2)
(FO'::a- Fp1 )(-:, z) (FO' - F p::a)(-:2, -:) (FO'.- Fp5 )(z2, z) (FO'a- Fp4 )(z, '%) (Fto - Fp3 )(-:, -:2) (F0'3- FP6)(z, z2)
(FO's- Fp,.)(l', z) (FO' .. - Fps)(l'2' '!) (FO'- F P'l)(z2, z) (FO':~- Fp1 )(z,l') (Fu3 - Fp6 )(l', z2) (Flo- Fp3)(z, z2)
II[z,z2 )(.E) =
(Flo+ Fp3 )(z, z2) (FO's + Fp4 )(-:, z) ( FO' .. + Fps )(-:2 ''%) (Fq3 + Fp6 )(-:, -:2) (FO'::a + FpJ(z, '!) (Fu + FP'l)(z2, z)
(FO' + Fp4 )(z, z2) (Flo+ Fp5 )(l', z) (FO's + Fp6 )('!2, '!) ( FO' .. + FP1 )('!, '!2) (F0'3 + Fp:~)(z, z) (Fu::~ +Fp3)(z2 ,z) (FO'::a + Fp5 )(z, z2) (FO' + FP6)(-:, z) (Fto + FP1 )(%2
, '!) (FO's +FP'l)(%,z2) (FO' .. + Fp 3 )(z, z) (Fq3 + Fp4 )(z2 , z) (Fu3 + Fp6 )(z, i 2) (FO', + Fp1 )(-:, z) (FO' + FP::a)('%2,-:) (Fto + FP3)('%, -:2) (Fus + Fp,.)(z, '%) (Fu• +Fp5 )(z2 ,z) ( FO' .. + Fp1 )( z, z2) (Fq3 + Fp:~)(l', z) (Fu::a + Fp3 )(z2,z) (FO' + Fp,.)(l', z2) (flo +Fp5 )(z,z) (Fus + Fp6 )(z2
, z) (FO's + FP'l)(z, z2) (FO' .. + Fp3 )(-:, z) (F0'3 + Fp4 )(-:
2, -:) (F0'2 + Fp5 )(-:, -:2) (Fu + Fp6 )(z, '%) (F1 0 + Fp1 )(z2 , z)
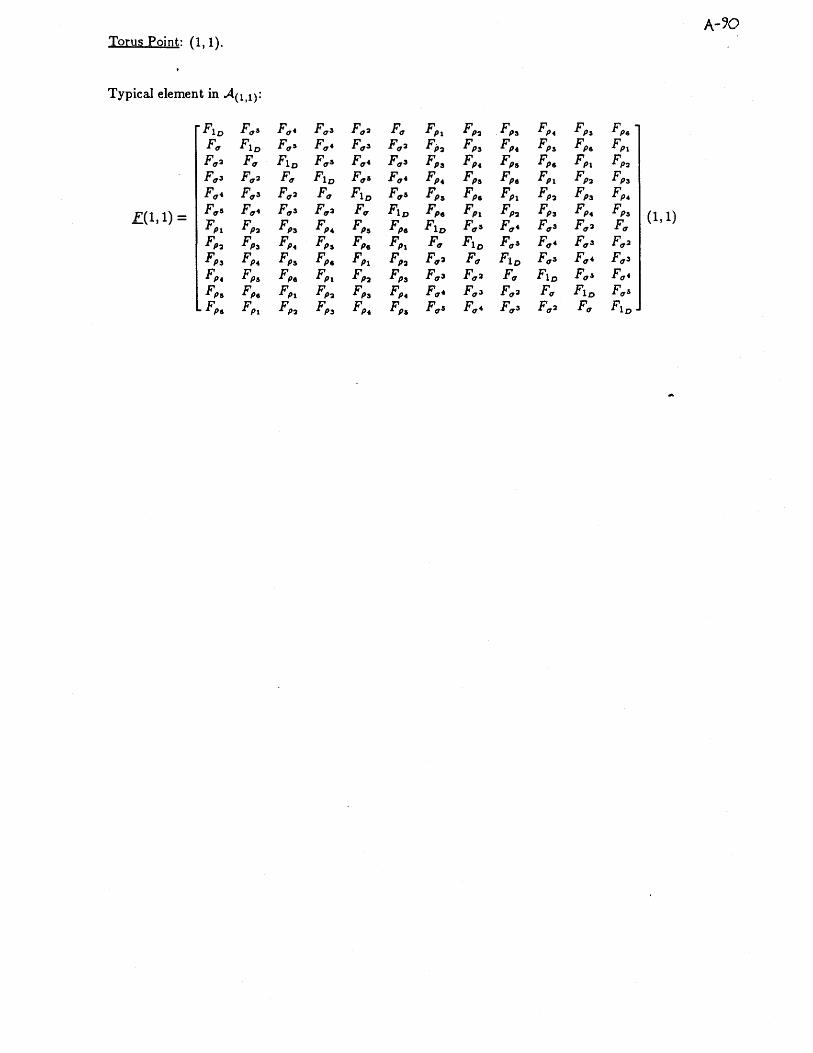
A-'0 Torus Point: (1, 1).
Typical element in A(l,l):
Flo F~s F~· F~:s F~2 F~ FP1 FP2 Fp:s FP• Fp,. Fpe F~ Flo F~s F~· F~:s F~2 FP2 Fp:s FP• Fp,. Fps FP1 F~2 F~ Flo F~s F~· F~:s Fp:s Fp. Fp,. Fpa FP1 FP2 F~:s F~2 F~ Flo F~a F~· Fp,. Fp,. Fps FPl Fp, Fp:s F~· F~:s F~, F~ Flo F~a Fp,. Fpa Fpl Fp, Fp:s Fp,.
F(1, 1) = F~a F~· F~:s F~, F~ FlD FP• FPt Fp, Fp:s Fp,. Fp,. (1, 1) FP1 FP2 FP3 Fp,. Fp,. FP• Flo F~a F~· F~:s F~, F~
FP2 FP:s Fp,. Fp,. Fp• FPt F~ FlD F~s F~· F~:s F~,
Fp:s Fp,. Fp,. Fpa FPt FP2 F~, F~ Flo F~a F~· F~:s
FP• Fp,. FP• FPt FP2 Fp:s F~:s F~2 F~ FlD F~s F~· Fp,. Fpa FP1 FP2 FP:s Fp,. F~· F~:s F~, F~ F1 0 F~s
Fps FPl Fp, Fp:s Fp,. Fp,. F~a F~· F~:s F~, F~ Flo
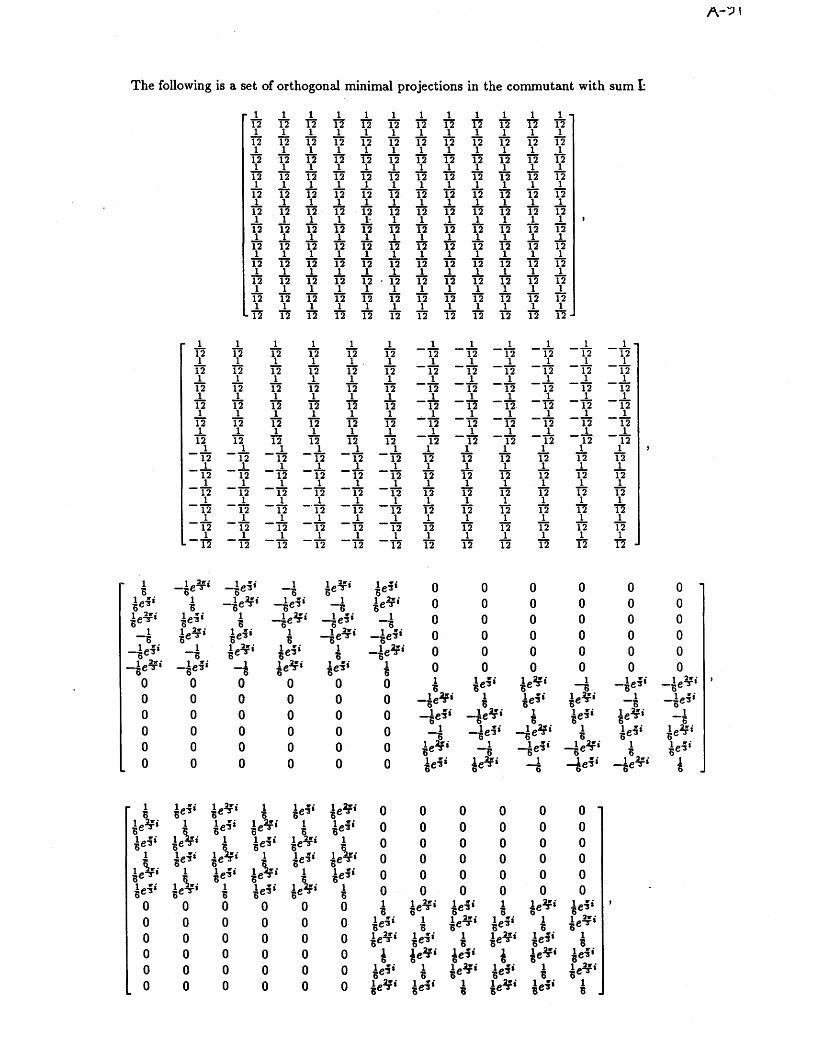
A-?\
The following is a set of orthogonal minimal projections in the commutant with sum I:
1 1 1 1 1 1 1 1 1 1 1 1 i2 i2 i2 i2 i2 i2 i2 i2 i2 i2 i2 i2 1 1 1 1 1 1 1 1 1 1 1 1
i2 12 i2 i2 i2 i2 i2 i2 12 i2 12 i2 1 1 1 1 1 1 1 1 1 1 1 1
12 i2 i2 i2 i2 i2 i2 i2 112 i2 i2 i2 1 1 1 1 1 1 1 1 1 1 1
T2 T2 T2 T2 T2 T2 T2 T2 T2 T2 T2 i2 1 1 1 1 1 1 1 1 1 1 1 1 i2 i2 T2 i2 i2 T2 12 T2 T2 T2 T2 T2 1 .1. 1 1 1 1 1 1 1 1 1 1
12 12 T2 T2 i2 T2 T2 T2 T2 T2 F2 i2 1 1 1 1 1· 1 1 1 1 1 1 1
T2 T2 T2 T2 i2 T2 T2 T2 i2 T2 T2 12 1 .1. .1. 1 .1. 1 1~ .1. .1. 1 .1. 1
12 12 12 T2 12 T2 12 12 T2 12 T2 1 1 1 1 1 1 1 1 1 1 1 1
T2 T2 T2 T2 T2 T2 T2 T2 12 T2 T2 T2 .1. 1 .1. 1 .1. 1 1 1 1 1 1 1 12 T2 12 T2 12 ·T2 12 T2 T2 T2 T2 T2 1 1 1 1 1 1 1 1 1 1 1 1
T2 T2 T2 T2 12 T2 T2 T2 T2 T2 T2 T2 1 1 1 1 1 1 1 1 1 1 1 1 12 T2 T2 T2 T2 T2 T2 T2 T2 T2 T2 T2
1 1 1 1 1 1 1 1 1 1 1 1 T2 T2 T2 T2 T2 T2 -12 -12 -n -n -12 -n 1 1 1 1 1 1 1 1 1 1 1 1
T2 12 12 12 12 12 -n -n -n -12 -12 -12 1 1 1 1 1 1 1 1 1 1 1 1 12 T2 T2 T2 T2 T2 -12 -n -12 -n -12 -n 1 1 1 1 1 1 1 1 1 1 1 1
T2 T2 T2 12 T2 12 -12 -n -12 -n -n -12 1 1 1 1 1 1 . 1 1 1 1 1 1
T2 T2 T2 T2 T2 12 -n -n -n -n -n -n 1 1 1 1 1 1 1 1 1 1 1 1 12 T2 T2 12 12 T2 -12 -12 -12 -n -n -12
1 1 1 1 1 1 1 1 1 1 1 1 -12 -n -n -n -n -n T2 T2 T2 T2 T2 T2
1 1 1 1 1 1 1 1 .1. 1 1 1 -12 -n -n -n -12 -n 12 T2 12 12 T2 T2
1 1 1 1 1 1 1 1 1 1 1 1 -n -n -n -n -n -n T2 T2 T2 T2 T2 T2 1 1 1 1 1 1 1 1 1 1 1 1 -n -n -n -n -n -n T2 T2 T2 T2 T2 T2 1 1 1 1 1 1 1 1 1 1 1 1 -n -n -n -n -n -12 T2 T2 T2 T2 T2 T2 1 1 1 1 1 1 1 1 1 1 1 1 -n -n -12 -n -n -12 T2 T2 T2 12 12 12
1 1 , ... --ie-3' 1 1elfi leii 0 0 0 0 0 0 0 - 0e7' 6 t) f , ...
~eii 1 1 'fi --%eii 1 0 0 0 0 0 0 0 -oe 6 0e7' 1 , ... le-ii 1 1 'f"
ie!'. 1 0 0 0 0 0 0 0 e71
f ,,... 0 6e • 6 1 leii 1 -~eii 0 0 0 0 0 0 -0 oe~• t) t) 6e~'
--%eii 1 1 ,,.. . le-3' 1 1 'f" 0 0 0 0 0 0 -0 oe-.r• fe'fi
0 6e • -te'fi -~e-3' ~ ieii 1 0 0 0 0 0 0 1; 1
0 0 0 0 0 0 1 %e-3i 1e':fi 1 -%eii 1 ,,... ,
1o'f. 0 6 -oe-.r• 0 0 0 0 0 0 1 ie-3' 1e'fi 1 -%eii 6e • 0 0 -0 0 0 0 0 0 0 ~eii ~e'fi 1 ieii te'fi -i 11,,... 1 0 0 0 0 0 0 1 --%ei' 1 1e-3'
1 ,,.. .
lJ:i 6e~•
1!¥• 0 oe-.r•
0 0 0 0 0 0 1 --ie-3' 1 ie-3' 0 6 6 0 0 0 0 0 0 0 ie-ii
1 ,,.. . 1 -ieii 1 , ... 1 1e~• 6 -ae-.r• 1
1 leii le'fi 1 le-3' le'fi 0 0 0 0 0 0 0 t) 0 0 t) 0 1 ,,... 1 leii le'fi 1 1eii 0 0 0 0 0 0 oe~• te\.•
0 0 0 0 ie-3' 1 %e-3i le'fi 1 0 0 0 0 0 0 0 0 0
te\• 1 ieii le'fi 1 1eii 0 0 0 0 0 0 te\i
a ie~i 1 1 1 ~ei' 1 ieii 0 0 0 0 0 0 0 1 ,,...
te\• 1e-3i oe-.r• 1 ie-ii 1 0 0 0 0 0 0 0 t) 0 0 0 0 0 0 0 0 1 1 ,,.. .
pe!'. 1 1e'fi pe!'. a t>e~• 1 1
0 0 0 0 0 0 ie-3' 1 1ei' 1 0 oe~•
fe'fi 0 oe-.r•
0 0 0 0 0 0 le'fi 1e-3i 1 1eii 1 0 f ';" 0 0 0 0
0 0 0 0 0 0 i p;~', 1 ie'fi p;~·. 1e • a
0 0 0 0 0 0 ie-3' 1 1ei' 1 0 0
fe'fi 0 0
0 0 0 0 0 0 le'fi ieii 1 1eii 1 0 0 0 0 0
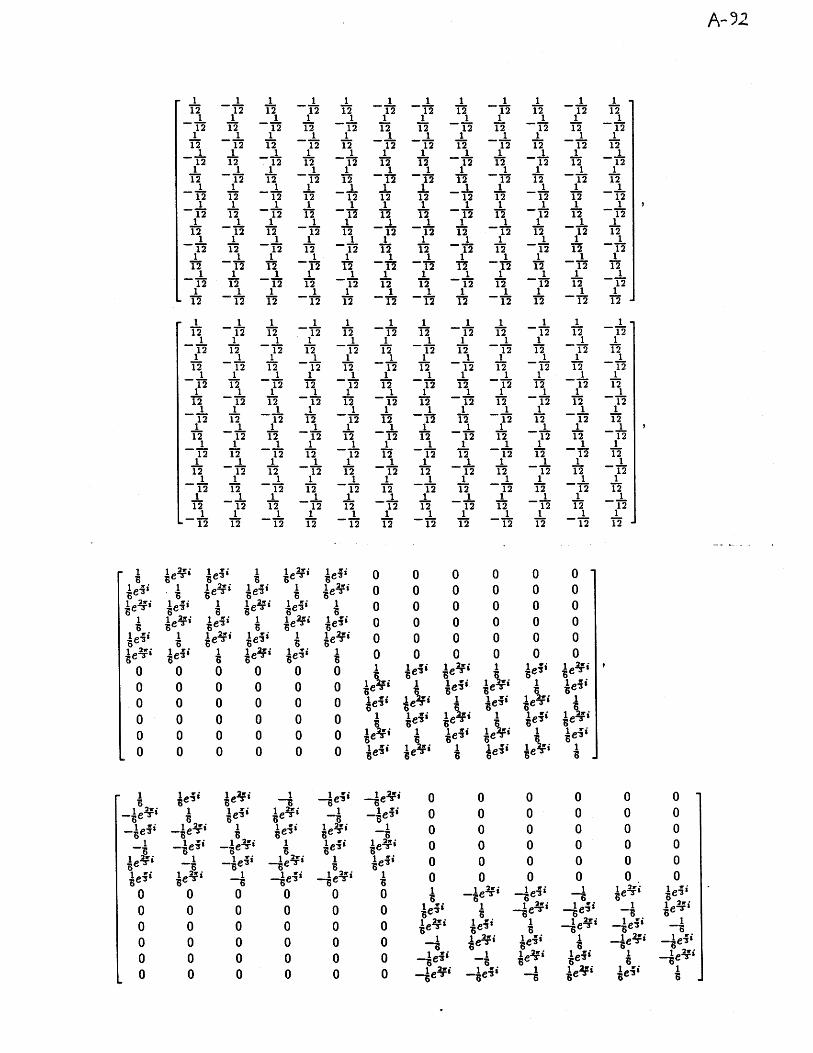
1 1 1 1 1 1 1 1 1 1 1 1 i2 -12 i2 -12 i2 -n -n 12 -n i2 -n i2
1 1 1 1 1 1 1 1 1 1 1 1 -12 i2 -n i2 -12 i2 i2 -12 12 -12 i2 -n
1 1 1 1 1 1 1 1 1 1 1 1 i2 -n i2 -n i2 -n -n i2 -n i2 -n i2
1 1 1 1 1 1 1 1 .l.. 1 1 1 -n i2 -n i2 -n i2 i2 -n 12 -n i2 -n 1 1 1 1 1 1 1 1 1 1 1 1
i2 -n T2 -n T2 -n -n i2 -n T2 -n i2 1 1 1 1 1 1 1 1 1 1 1 1 -n T2 -n T2 -n i2 T2 -n T2 -12 i2 -n 1 1 1 1 1 1 1 1 1 1 1 1 -n T2 -n T2 -n i2 T2 -n T2 -n i2 -n
1 -1
12
1 1 1 1 1 1 1 1 1 1 T2 T2 -n T2 -n -12 T2 -n T2 -n T2
1 1 1 1 1 1 1 1 1 1 1 1 -n T2 -n T2 -n i2 T2 -n T2 -n T2 -n 1 1 1 1 1 1 1 1 1 1 1 1
T2 -n T2 -n T2 -n -n 11 -n T2 -n T2 1 1 1 1 1 1 1 1 1 1 1 1 -n i2 -12 T2 -12 i2 T2 -n T2 -n i2 -n
1 1 1 1 1 1 1 1 1 1 1 1 12 -n 12 -n T2 -n -n T2 -n T2 -12 12
1 1 1 1 1 1 1 1 1 1 1 1 12 -n 12 -n T2 -n T2 -12 12 -12 T2 -n
1 1 1 1 1 1 1 1 1 1 1 1 -n T2 -n 12 -n T2 -n T2 -12 T2 -12 12 1 1 1 1 1 1 1 1 1 1 1 1
T2 -12 T2 -12 T2 -12 T2 -n T2 -n 12 -12 1 1 1 1 1 1 1 1 1 1 1 1 -n 12 -n 12 -n i2 -12 T2 -12 T2 -n T2
1 1 1 1 1 1 1 1 1 1 1 1 12 -n T2 -n T2 -n T2 -n T2 -n T2 -n
1 1 1 1 1 1 1 1 1 1 1 1 -n I2 -n T2 -n T2 -n T2 -n T2 -12 T2 1 1 1 1 1 1 1 1 1 1 .l.. 1
T2 -n T2 -n T2 -n i2 -12 i2 -n 12 -n 1 1 1 1 1 1 1 1 1 1 1 1 -n 12 -n i2 -n i2 -n T2 -n i2 -n i2
1 1 1 1 1 1 1 1 1 1 1 1 i2 -n 12 -n i2 -n T2 -n T2 -n i2 -12
1 1 1 1 1 1 1 1 1 1 1 1 -n i2 -n T2 -12 i2 -12 T2 -n 12 -n T2 1 1 1 1 1 1 1 1 1 1 1 1
i2 -n T2 -n i2 -n i2 -n i2 -n i2 -n 1 1 1 1 1 1 1 1 1 1 1 1 -n i2 -12 T2 -12 12 -n i2 -n 12 -12 i2
1 1 ,,.. 1e-Ji 1 1 ,,..
1e-Ji 0 0 0 0 0 0 ~ ~e-:r• f ,,.. ~ ~e-:r' f ,,..
1e-Ji 1 ~e-:r' 1e-Ji 1 ~e-:r' 0 0 0 0 0 0 ~ ·~ f ,,.. ~ 1 ,,..
1e-Ji 1 1e-Ji 1 0 0 0 0 0 0 ~e'"'3"'' felfi
~ ~e-:r' fe¥i
~ 1 1e-Ji 1 %e-Ji 0 0 0 0 0 0 ~ ~
fe¥i ~ ~
1e-Ji 1 1e-Ji 1 1 ,,.. 0 0 0 0 0 0
~ ~ ~ ~ ~ ~e-:r' 1 ,,..
!e-Ji 1 1 ,,. . !eii 1 0 0 0 0 0 0 ~e'"'3"'' ~ ~e'"'3"'' ~
0 0 0 0 0 0 1 %eii 1elfi 1 1e-Ji 1 , ... '
1e"\• '8
1e\i '8 'Se'"'3"''
0 0 0 0 0 0 1 1e-Ji 1 1e-Ji ~ 1 , ... ~ ~
1e\• '8
0 0 0 0 0 0 !eii ~e'"'3"'' 1 !e-Ji 1 1 ,.,. ~ 1 ,.,.
0 0 0 0 0 0 1 1eii 1 1e-Ji
1e\;.i '8 'Se'"'3"''
1e\.i '8 'Se'"'3"''
0 0 0 0 0 0 1 1e-Ji 1 !e-Ji '8 !e\.• '8 ~ '8
0 0 0 0 0 0 !eii 1 !eii !e'fi 1 '8 '8
1 %e!i 1elfi 1 -%e!i 1 ¥' 0 0 0 0 0 0 ~ ~ , ,e '
1 ':fi 1 lei• 1elfi 1 -!eii 0 0 0 0 0 0 -~e 1'8lfi
'8 , -!e-Ji 1 !e-Ji 1elfi 1 0 0 0 0 0 0 -'Be ~ '8 -'8
1 -!e-Ji 1 , ... 1 !e-Ji
1 ,,... 0 0 0 0 0 0
-~ -~e'"'3"''
-t!¥•
~e-:r•
1e2Ji 1 -!eii 1 1e-Ji 0 0 0 0 0 0 ~ -~
-t!¥• ~
!eii 1elfi 4 4e-Ji 1 0 0 0 0 0 0
~ '8 1 , .... ie!•. -1
1 ,,.·. 1e-Ji 0 0 0 0 0 0 1
'8 -'8e'"'3"'' ~e'"'3"'' P 2r•
0 0 0 0 0 0 1e-3i 1 -%e-3i 1
fe':fi '8 ,e-:r' -~ ~e-:r'
1e-Ji 1 1 2r • 4e3i 1 0 0 0 0 0 0 '8
fe':fi ~ ,e'"'3"'' ,
0 0 0 0 0 0 -% p;~ii 1 1 J;' -!eii
'8 ~ ,e '
0 0 0 0 0 0 -!e-li 1 1e-Ji 1 1elfi , ~ fe':fi
'8 , 0 0 0 0 0 0 1e¥i -!e-li 1 !e-li 1 , , '8 '8
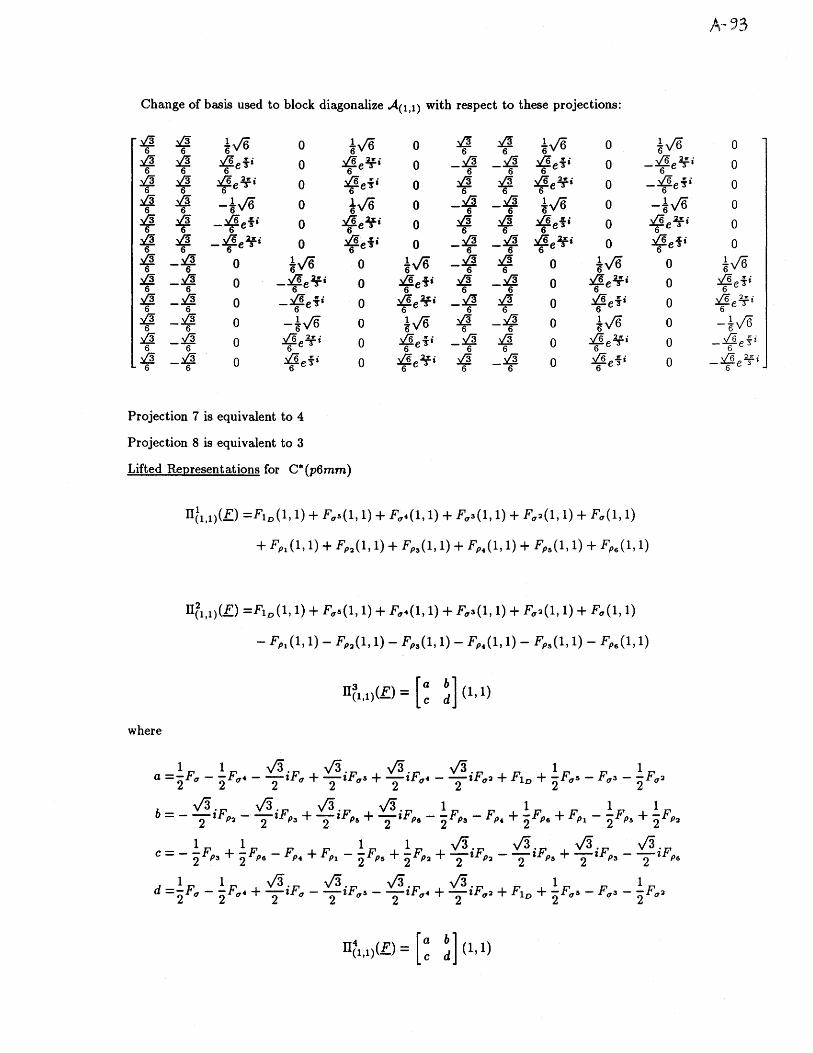
A·-93
Change of basis used to block diagonalize .A(l,l) with respect to these projections:
:& :& tv'6 0 tv'6 0 :& :& tv'6 0 tv'6 0 6 6 6 6 :& :& :l!efi 0 :1! :l•i 0 _:& -~ ~efi 0 ::f1 211' i 0 6 6 6 6e'T 6 6 6 - 6 ea
4 :& ~ 2•i 0 4-efi 0 :& :& :l!elfi 0 _::f1.efi 0 6 ea 6 6 6 6
~ ~ -iv'6 0 lv'6 0 ~ ~ tJ6 0 -iv'6 0 6 6 - 6 - 6 ~ ~ ~efi 0 ~elfi 0 ~ ~ =iiefi 0 =iieAf-i 0 6 6 - 6 6 6 6 6 6 ~ ~ ~elfi 0 :l!efi 0 ~ ~ ~elfi 0 ~efi 0 6 6 - 6 6 - 6 - 6 6 6 :& _:& 0 t¥'6 0 tv'6 ~ ~ 0 tv'6 0 i/6 6 6 - 6 6 :& _:& 0 _:f!elfi 0 ~efi :& -~ 0 :l!elfi 0 :l!efi
6 6 6 6 6 6 6 6 ~ _:& 0 _:f!efi 0 ~elfi _:& ~ 0 :l!efi 0 ::f1 211'i
6 6 6 6 6 6 6 6 eT
~ -~ 0 -lv'6 0 !v'6 ~ -~ 0 !v'6 0 -!/6 6 6 6 6 ~ -~ 0 :11. 211' i 0 :l!efi -~ ~ 0 :IJ.. 2lr i 0 _.i§:eii 6 6 6e'T 6 6 6 6
eT 6
~ -~ 0 :IJ.efi 0 :l!elfi ~ -~ 0 :l!eii 0 :11 2£i 6 6 6 6 6 6 6 - 6 e 3
Projection 7 is equivalent to 4
Projection 8 is equivalent to 3
Lifted Representations for c• (p6mm)
IIh,1)(F) =F1 0 (1, 1) + Fu&(1, 1) + Fu•(1, 1) + F173(1, 1) + Fu,(1, 1) + Fu(1, 1)
+ Fp 1 (1, 1) + Fp:l(1, 1) + Fp3(1, 1) + Fp4 (1, 1) + Fp&(1, 1) + Fp6 (1, 1)
IIf1,1)(F) =F1 0 (1, 1) + Fu&(1, 1) + Fu•(l, 1) + Fu3(l, 1) + Fu:l(1, 1) + Fu(1, 1)
- Fp 1 (1, 1)- Fp2 (1, 1)- Fp3(1, 1)- Fp 4 (1, 1)- Fp&(1, 1)- Fp6 (1, 1)
nf,,l)(F) = [: ! ] (1, 1)
where
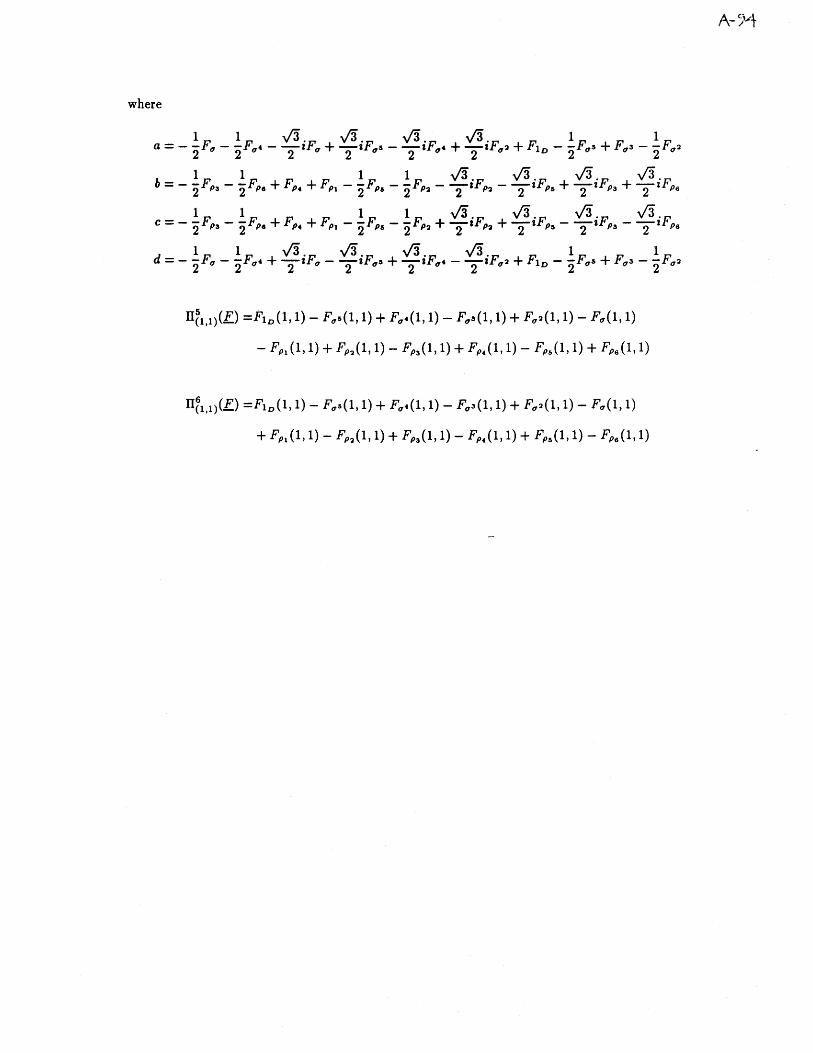
where
1 1 J3. J3. J3. J3. 1 1 a=- 2Fa- 2Fa• - 2'Fa + T'Fas - T'Fa• + T'Fa2 + F1v - '2Fas + Fa3 - '2Fu2
1 1 1 1 v'3. -13. v'3. J3. b =- 2FP3 - 2Fpe + Fp4 + FPt - 2FPs - 2FP2 - T1FP2 - 21Fpa + T 1FP3 + T 1FP6
1 1 1 1 v'3. v'3. v'3. v'3. c =- 2FP3- 2FPe + Fp. + FP•- 2FPs- 2FP2 + 2aFP2 + 2'Fp,.- 2'FP3- 2zFP6
1 1 v'3. v'3. v'3. v'3. 1 1 d =- 2Fa- 2Fa• + T'Fa- T'Far. + 21Fa• - T'Fa2 + Ftv - 2Far. + Fa3 - 2Fa2
5 . ll(t,t)(F) =Ftv(1, 1)- Far.(1, 1) + Fa•(1, 1)- Fa3(1, 1) + Fu2(1, 1)- Fa(1, 1)
- Fp 1 (1, 1) + Fp2(1, 1)- Fp3(1, 1) + Fp4(1, 1)- Fp5 (1, 1) + Fp6(1, 1)
ll(1,1)(F) =Ftv(1, 1)- Fa5(1, 1) + Fa•(l, 1)- Fa3(1, 1) + Fu2(1, 1)- Fa(1, 1)
+ Fp 1 (1, 1)- Fp2(1, 1) + Fp3(1, 1)- Fp4 (1, 1) + Fp5 (1, 1)- Fp6 (1, 1)
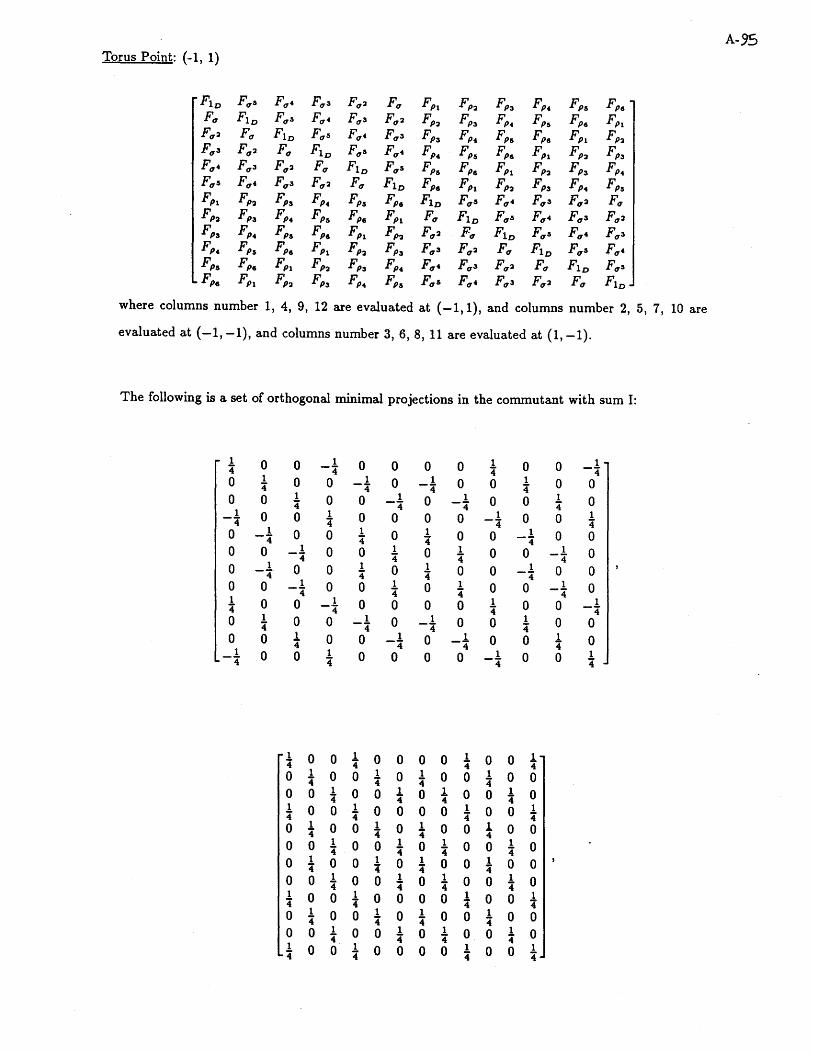
A-95 Torus Point: (-1, 1)
Flo Fqa Fqt Fq:s Fq'l Fq Fp. FP'J Fp:s Fp. Fpa Fps Fq Flo Fqa Fqt Fq:s Fq'l FP'J Fp:s Fp. Fpa Fps Fp. Fq'l Fq Flo Fqa Fqt Fq:s Fp:s Fp" Fpa Fps Fp. Fp'J Fq:s Fq'l Fq Flo Fqa Fq• Fp,. Fpa Fp. FP• FP'J FP:s Fqt Fq:s Fq'l Fq F1 0 Fqa Fps FPs Fp. Fp'J FP:s Fp,. Fqs Fqt Fq:s Fq'J Fq Flo Fps Fp. Fp'J Fp:s Fp,. Fpa Fp. FP'J Fp:s Fp,. Fps Fps F10 Fqa Fq" Fq:s Fq'l Fq FP'J Fp:s Fp,. Fpa Fps FP1 Fq Flo Fq5 Fq" Fq:s Fq'l FP:s Fp,. FP5 FP& FPl FP2 Fq2 Fq Flo Fqa Fq" Fq:s Fp,. Fps FP• Fp• Fp, FP:s Fq:s Fq'l Fq F1 0 Fqa Fq" Fpa Fps FP• FP2 Fp:s Fp,. Fq" Fq:s Fq'l Fq Flo Fqa Fp,. Fp. FP'l FP:s Fp,. Fpa Fqa Fq" Fq:s Fq, Fq F10
where columns number 1, 4, 9, 12 are evaluated at ( -1, 1), and columns number 2, 5, 7, 10 are
evaluated at ( -1, -1), and columns number 3, 6, 8, 11 are evaluated at (1, -1).
The following is a set of orthogonal minimal projections in the commutant with sum I:
1 0 0 1 0 0 0 0 1 0 0 1 4 -4 4 -4 0 1 0 0 1 0 1 0 0 1 0 0 4 -4 -4 4 0 0 1 0 0 1 0 1 0 0 1 0 4 -4 -4 4
1 0 0 1 0 0 0 0 1 0 0 1 -4 4 -4 4 0 1 0 0 1 0 1 0 0 1 0 0 -4 4 4 -4 0 0 1 0 0 1 0 1 0 0 1 0 -4 4 4 -4 0 1 0 0 1 0 1 0 0 1 0 0 -4 4 4 -4 0 0 1 0 0 1 0 1 0 0 1 0 -4 4 4 -4 1 0 0 1 0 0 0 0 1 0 0 1 4 -4 4 -4 0 1 0 0 1 0 1 0 0 1 0 0 4 -4 -4 4 0 0 ! 0 0 1 0 1 0 0 1 0 4 -4 -4 4
1 0 0 1 0 0 0 0 1 0 0 1 -4 4 -4 4
1 0 0 1 0 0 0 0 1 0 0 1 4 4 4 4 0 1 0 0 1 0 1 0 0 1 0 0 4 4 4 4 0 0 1 0 0 ! 0 ! 0 0 1 0 4 4 4 4 1 0 0 1 0 0 0 0 1 0 0 1 4 4 4 4 0 1 0 0 1 0 1 0 0 1 0 0 4 4 4 4 0 0 1 0 0 1 0 1 0 0 1 0 4 4 4 4 0 1 0 0 1 0 1 0 0 1 0 0 4 4 4 4 0 0 1 0 0 1 0 1 0 0 1 0 4 4 4 4 1 0 0 1 0 0 0 0 1 0 0 1 4 4 4 4 0 1 0 0 1 0 1 0 0 1 0 0 4 4 4 4 0 0 1 0 0 1 0 1 0 0 1 0 4 4 4 4 1 0 0 1 0 0 0 0 1 0 0 1 4 4 4 4
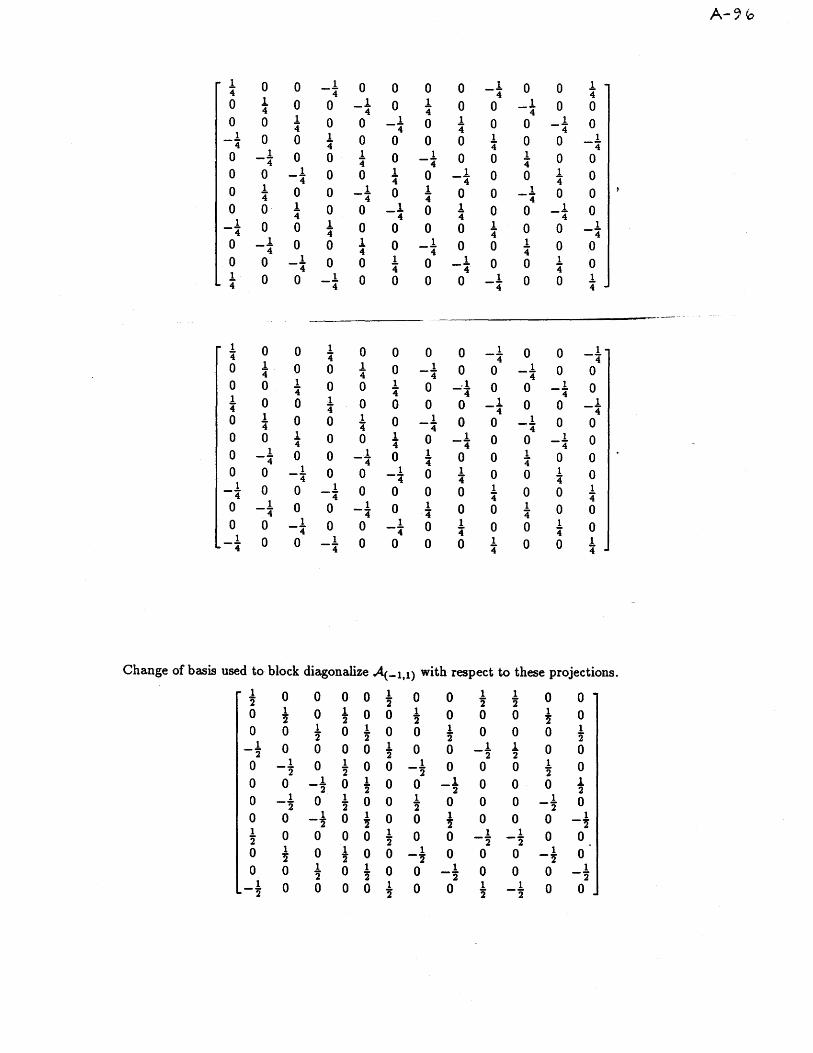
1 4 0
0 1 -4
0 0
0
0 _1
4 0
0 1 4
1 4 0 0 1 4 0 0
0 0
0 1 4 0
0
-i 0 1 4 0
0
0 1 4 0 0 1 4 0
0
0 1 4 0
0 1 -4
0 1 4 0
0
0 0 1 4 0
0 1 4 0
1 -4 0
0 1 4 0 0
0 0 1 4 0
0
1 4 0 0 1 4 0 0
0 0
0 _1
4 0 0 1 4 0
1 -4 0
0 1 4 0
0
0 1 4 0 0 1 4 0
0
0 1
-4 0 0 1 4 0
1 -4 0 0 1 4 0
0 0 1 4 0 0 1 4 0
0 1 4 0 0
1 -4 0 1 4 0
0
0
1 -4 0 1 4 0
0 1 4 0 0
0
0 1 4 0
0 1
-4 0 1 4 0 0
0
0 .1
-4 0 0
-! 0 1 4 0 0 1 4 0
1 -4 0
0 1 4 0 0
0
0 1 4 0 0
_1 4
1 -4 0
0
0 0 1 4 0
0 1 4
0 _!
4 0 0 1 4 0
-i 0
0 1 4 0 0
0
1 -4 0 1 4 0
0 1 4 0 0
0
0 1
-4 0
0 1 4 0
1 -4 0 0 1 4 0
0
0
1 -4 0 1 4 0 0 1 4 0
1 4 0
0
1 -4 0 0
0 0 1 4 0 0 1 4
Change of basis used to block diagonalize A( _1,1) with respect to these projections.
1 2 0 0
1 -2 0 0
0 0 1 2 0
0
0
i 0 0
0
0 1 2 0
0 0 ~ i 0 0 0 ~ 0 0 0 1
2 0 ~ 0 0 -i 0
0 ~ i 0 0 0
-i 0 ! 0 0 0 0 ~ 0 1 0 0 2 ~ 0 ~ 0 0 0 0 ~
0 1 2 0
0 1
-2 0 1 2 0 0
0 0 1 2 0 0
1 2 0 0
1 -2 0
0
0 0
1 2 0 0 1 2 0 0
0
0
0 1 2 0 0 1 2 0
0
0 1 2 0 0 1 2 0
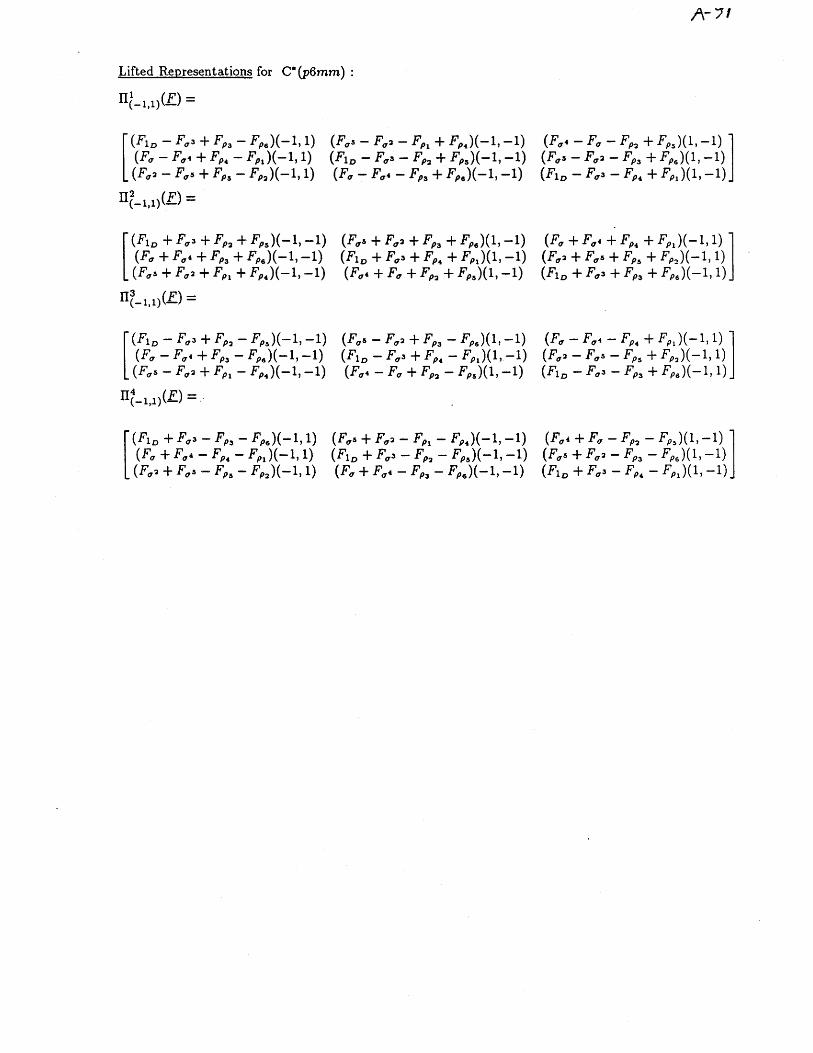
A-71
Lifted Representations for C* (p6mm) :
TI(-l,l)(F) =
[
(Flo- Fu3 + Fp3 - Fp6 )(-1, 1) (Fu- Fu• + Fp4 - Fp 1 )( -1, 1) (Ful- Fu:s + Fp 5 - Fp2 )( -1, 1)
n[_1,l)(F) =
(Fu:s- Fql- Fp 1 + Fp4 )( -1, -1) (Fu•- Fa- Fp2 + Fp5 )(1, -1) ] (Flo- Fu3- Fp2 + Fp5 )(-1, -1) (Fu:s- Ful- Fp3 + Fp6 )(1, -1) (Fu- Fu•- Fp3 + Fp6 )(-1, -1) (F1 0 - Fa3- Fp4 + FpJ(1, -1)
[
(Flo +Fu3 +Fp2 +FpJ(-1,-1) (Fa:s +Ful +Fp3 +Fp6 )(1,-1) (Fu +Fu• +Fp4 +FpJ(-1,1)] (Fu + Fu• + Fp3 + Fp6 )( -1, -1) (F1 0 + Fa3 + Fp4 + FpJ(1, -1) (Ful + Fu:s + Fp5 + Fp.;z)( -1, 1) (Fu:s + Ful + Fp 1 + Fp4 )( -1, -1) (Fu• + Fu + Fp2 + Fp5 )(1, -1) (Flo+ Fu3 + Fp3 + Fp6 )( -1, 1)
n~-l,l)(F) =
[
(Flo- Fu3 + Fp2 - Fp5 )(-1, -1) (Fu:s- Ful + Fp3 - Fp6 )(1, -1) (Fu- Fa•- Fp4 + FpJ(-1, 1)] (Fu- Fu• + Fp3 - Fp6 )( -1, -1) (Flo- Fu3 + Fp4 - FpJ(1, -1) (Ful- Fu:s- Fp5 + Fp2 )( -1, 1) (Fus- Fu'J + Fp 1 - Fp4 )( -1, -1) (Fu•- Fa+ Fp2 - Fp5 )(1, -1) (F1 0 - Fu3- Fp3 + Fp6 )( -1, 1)
nt-l,l)(F) = .·
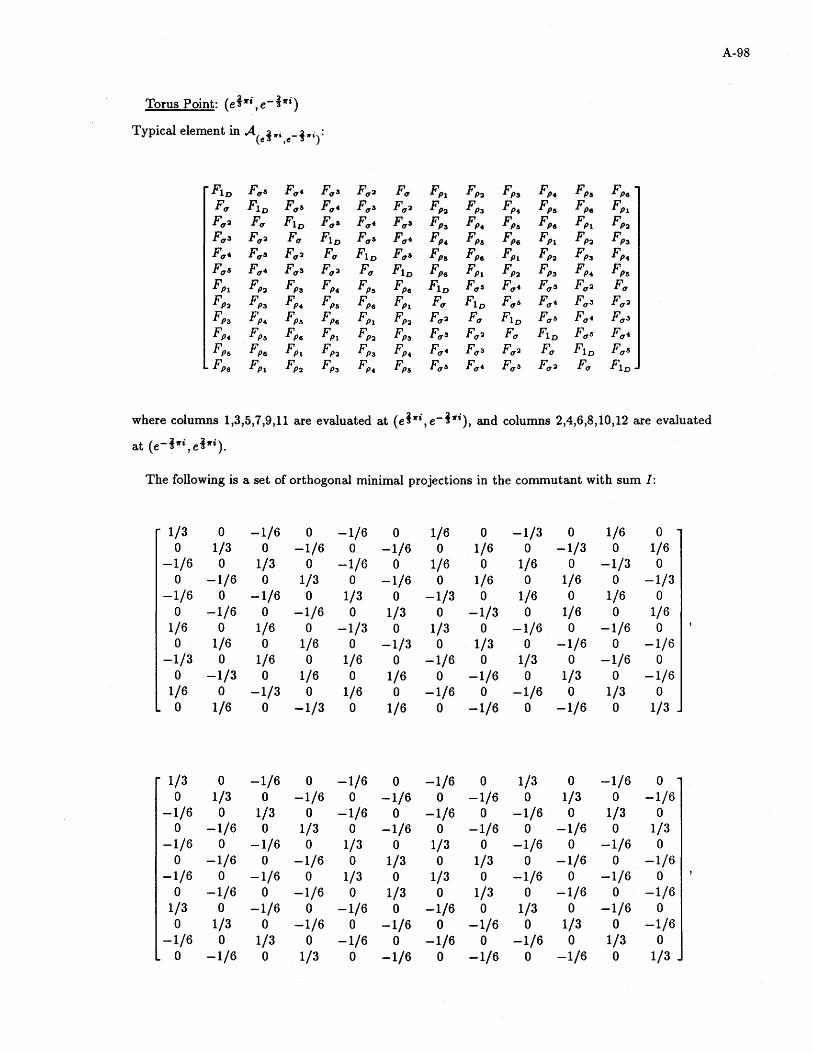
A-98
Torus Point: (ei1ri ,e-i1ri)
Typical element in A j•i -j•i : (e ,e )
Flo F6 a F(l• F6 3 F6 2 F(l FPt Fp, Fp3 Fp. Fpa FP6 F(l Flo F6 a F(l. F6 3 F6 2 Fp, FP3 FP• Fpa FP6 FPl F6 2 F(l Flo F6 s F(l. F6 3 FP3 Fp. FPs Fp6 FPt Fp, F6 3 F6 2 F(l Flo F6 a F(l• Fp. Fpa FP6 FPt Fp, FP3 F(l. F6 3 F6 2 F(l F1 0 F6 s Fpa FP6 Fpl FP2 FP3 FP• F(ls F(l• F6 3 F6 2 F(l Flo FP6 FPt FP2 Fp3 FP• Fpr. FPt FP2 FP3 FP• FPr. FP6 Flo F6 a F(l. F6 3 F6 2 F(l FP'l FP3 FP• FPr. FP6 FPl F(l Flo F(lt> F(l• F6 3 F6 2 FP3 Fp. Fpa FP6 FPl FP2 F6 2 F(l Flo F(lr. F(l• F6 3 Fp. Fpa FP6 FPt FP2 FP3 F6 3 F6 2 F(l Flo F6 a F(l• Fpa FP6 FPt FP'l FP3 Fp. F(l• F6 3 F6 2 F(l Flo F(lr. FP6 FPt FP2 FP3 FP• Fpa F6 a F(l• F6 3 F6 2 F(l Flo
where columns 1,3,5,7,9,11 are evaluated at (eill'i, e-ill''), and columns 2,4,6,8,10,12 are evaluated
at ( e-ill'i, eill'').
The following is a set of orthogonal minimal projections in the commutant with sum I:
1/3 0 -1/6 0 -1/6 0 1/6 0 -1/3 0 1/6 0 0 1/3 0 -1/6 0 -1/6 0 1/6 0 -1/3 0 1/6
-1/6 0 1/3 0 -1/6 0 1/6 0 1/6 0 -1/3 0 0 -1/6 0 1/3 0 -1/6 0 1/6 0 1/6 0 -1/3
-1/6 0 -1/6 0 1/3 0 -1/3 0 1/6 0 1/6 0 0 -1/6 0 -1/6 0 1/3 0 -1/3 0 1/6 0 1/6
1/6 0 1/6 0 -1/3 0 1/3 0 -1/6 0 -1/6 0 0 1/6 0 1/6 0 -1/3 0 1/3 0 -1/6 0 -1/6
-1/3 0 1/6 0 1/6 0 -1/6 0 1/3 0 -1/6 0 0 -1/3 0 1/6 0 1/6 0 -1/6 0 1/3 0 -1/6
1/6 0 -1/3 0 1/6 0 -1/6 0 -1/6 0 1/3 0 0 1/6 0 -1/3 0 1/6 0 -1/6 0 -1/6 0 1/3
1/3 0 -1/6 0 -1/6 0 -1/6 0 1/3 0 -1/6 0 0 1/3 0 -1/6 0 -1/6 0 -1/6 0 1/3 0 -1/6
-1/6 0 1/3 0 -1/6 0 -1/6 0 -1/6 0 1/3 0 0 -1/6 0 1/3 0 -1/6 0 -1/6 0 -1/6 0 1/3
-1/6 0 -1/6 0 1/3 0 1/3 0 -1/6 0 -1/6 0 0 -1/6 0 -1/6 0 1/3 0 1/3 0 -1/6 0 -1/6
-1/6 0 -1/6 0 1/3 0 1/3 0 -1/6 0 -1/6 0 0 -1/6 0 -1/6 0 1/3 0 1/3 0 -1/6 0 -1/6
1/3 0 -1/6 0 -1/6 0 -1/6 0 1/3 0 -1/6 0 0 1/3 0 -1/6 0 -1/6 0 -1/6 0 1/3 0 -1/6
-1/6 0 1/3 0 -1/6 0 -1/6 0 -1/6 0 1/3 0 0 -1/6 0 1/3 0 -1/6 0 -1/6 0 -1/6 0 1/3
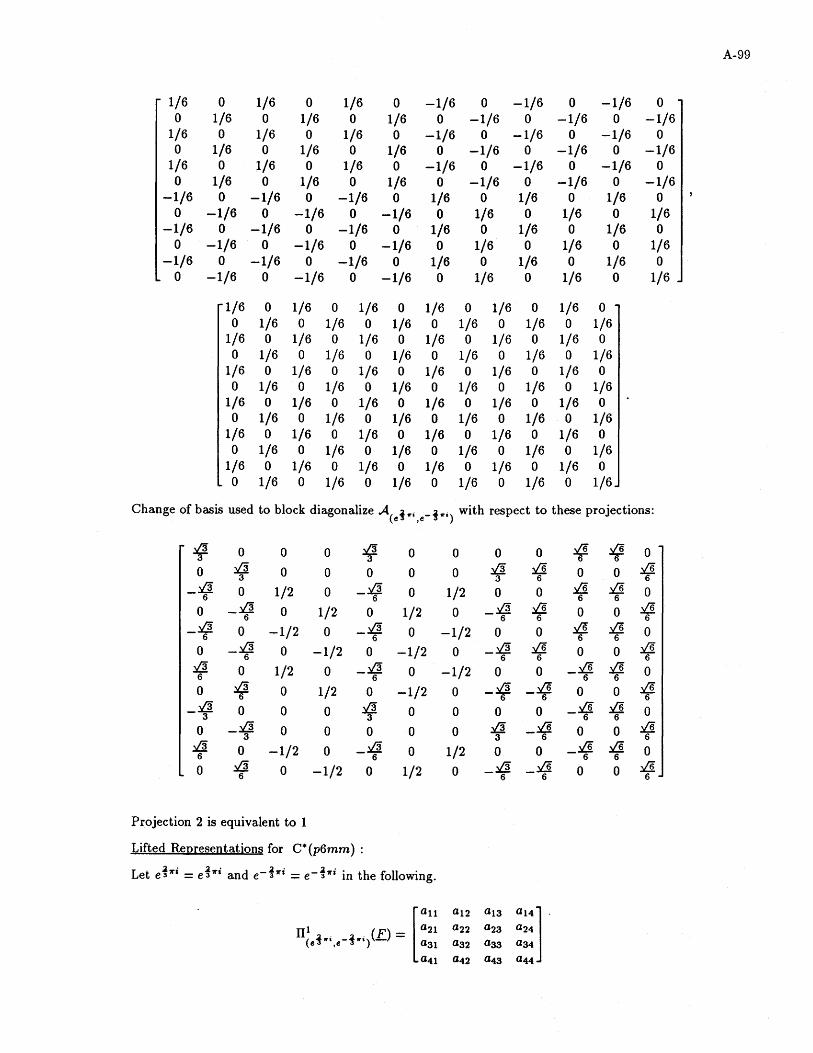
A-99
1/6 0 1/6 0 1/6 0 -1/6 0 -1/6 0 -1/6 0 0 1/6 0 1/6 0 1/6 0 -1/6 0 -1/6 0 -1/6
1/6 0 1/6 0 1/6 0 -1/6 0 -1/6 0 -1/6 0 0 1/6 0 1/6 0 1/6 0 -1/6 0 -1/6 0 -1/6
1/6 0 1/6 0 1/6 0 -1/6 0 -1/6 0 -1/6 0 0 1/6 0 1/6 0 1/6 0 -1/6 0 -1/6 0 -1/6
-1/6 0 -1/6 0 -1/6 0 1/6 0 1/6 0 1/6 0 0 -1/6 0 -1/6 0 -1/6 0 1/6 0 1/6 0 1/6
-1/6 0 -1/6 0 -1/6 0 1/6 0 1/6 0 1/6 0 0 -1/6 0 -1/6 0 -1/6 0 1/6 0 1/6 0 1/6
-1/6 0 -1/6 0 -1/6 0 1/6 0 1/6 0 1/6 0 0 -1/6 0 -1/6 0 -1/6 0 1/6 0 1/6 0 1/6
1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6
1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6
1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6
1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6
1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6
1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6 0 1/6
Change of basis used to block diagonalize A( j.-i -j.-i) with respect to these projections: e ,e
£1. 0 0 0 £1. 0 0 0 0 ~ ~ 0 3 3 6
0 ~ 0 0 0 0 0 ~ ~ 0 0 ~ 3 3 6 6 _:/i 0 1/2 0 _:/i 0 1/2 0 0 ~ :11. 0 6 6 6 6
0 -~ 0 1/2 0 1/2 0 _£1_ ~ 0 0 :11. 6 6 6 6
_£1_ 0 -1/2 0 _£1_ 0 -1/2 0 0 :11. :11. 0 6 6 6 6
0 -~ 0 -1/2 0 -1/2 0 _£1_ :11 0 0 :11. 6 6 6 6
il 0 1/2 0 _il 0 -1/2 0 0 _:11 ~ 0 6 6 6 6
0 :a 0 1/2 0 -1/2 0 _il ~ 0 0 :11. 6 6 - 6 6 _:a 0 0 0 :fi 0 0 0 0 £§_ :11 0 3 3 - 6 6
0 -~ 0 0 0 0 0 :fi :11. 0 0 :11. 3 3 - 6 6 :a 0 -1/2 0 _:a 0 1/2 0 0 :11. :11. 0 6 6 6 6
0 :a 0 -1/2 0 1/2 0 _£1_ -~ 0 0 :11. 6 6 6 6
Projection 2 is equivalent to 1
Lifted Reuresentations for C'" (p6mm) : 2 . 2 . _2 . 2 . • .
Let e 3 "'' = e 3 1n and e 3"" = e- 3 "'' m the followmg.
[au a12 a13 a14] . Ill F - a21 a22 a23 a24
(ei.-i,e-i"'i)(_)- a31 a32 a33 a34
a41 a42 a43 a44
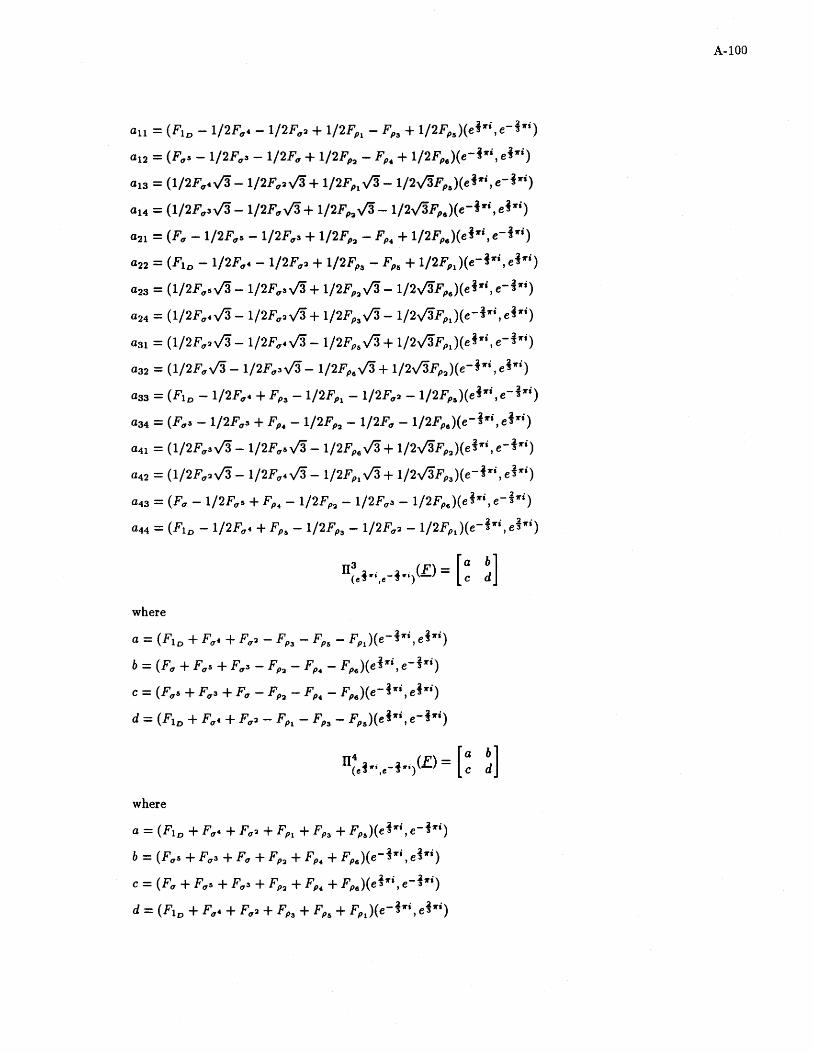
au =(Flo - 1/2Fa• - 1/2Fa~ + 1/2Fp1 - Fp3 + 1/2Fpa)(eix-i, e-ill'i)
a12 =(Faa- 1/2Fa:s- 1/2Fa + 1/2Fp~ - Fp4 + 1/2Fp6 )(e-jx-i, ei11'i)
a13 = (1/2Fa•Vl- 1/2Fa~Vl + 1/2Fp1 Vl- 1/2VlFp5 )(eix-i, e-jx-i)
a14 = (1/2Fa:sVl- 1/2FaVl + 1/2Fp~Vl- 1/2VlFp6 )(e-i•i, ei•i)
a21 =(Fa - 1/2Fas - 1/2Fa:s + 1/2Fp~ - Fp4 + 1/2Fp6 )(eix-i, e-j1ri)
a22 =(Flo - 1/2Fa• - 1/2Fa~ + 1/2Fp3 - Fp5 + 1/2Fp1 )(e-jx-i, ei"'i)
a23 = {1/2FaaVl- 1/2Fa:s.J3 + 1/2Fp~ .J3- 1/2.J3Fp6 )(eix-i, e-ill'i)
a24 = {1/2Fa•Vl- 1/2Fa~.J3 + 1/2Fp3 .J3- 1/2.J3FpJ(e-ix-i, ei"'i)
aa1 = (1/2Fa~V3- 1/2Fa•V3- 1/2Fpa V§ + 1/2.J3Fp1 )(eill'i, e-ix-i)
aa2 = (1/2Fa.J3- 1/2Fa:sV3- 1/2Fp6 -J3 + 1/2-JaFp~)(e-ill'i, eill'i)
aaa =(Flo- 1/2Fa• + Fp3 -1/2Fp1 - 1/2Fa~- 1/2Fp5 )(eix-i ,e-i1ri)
a34 =(Faa - 1/2Fa:s + Fp4 - 1/2Fp~ - 1/2Fa- 1/2Fp6 )(e-ill'i, ej1ri)
a41 = (1/2Fa:sV3- 1/2FaaV3- 1/2Fp6 V§ + 1/2-J3Fp~)(ejll'i, e-j1ri)
a42 = (1/2Fa~.J3- 1/2Fa• .J3- 1/2Fp1 .J3 + 1/2-J3Fp3 )(e-ill'i, etll'i)
a4a =(Fa- 1/2Faa + Fp.- 1/2Fp~- 1/2Fa:s- 1/2Fp6 )(eill'i, e-j1ri)
a44 =(Flo - 1/2Fa• + Fp 5 - 1/2Fp3 - 1/2Fa~ - 1/2Fp1 )(e-j1ri, ej1ri)
where
a= (Flo+ Fa• +Fa~- Fp3 - FPs- FpJ(e-ill'i, eill'i)
b =(Fa+ Fas + Fa:s- Fp~- FP•- Fp6 )(eill'i, e-ill'i)
c =(Faa+ Fa:s +Fa- Fp~- FP• - Fp6 )(e-ix-i, eill'i)
d =(Flo + Fa• +Fa~ - FP1 - FP3- Fpa)(eix-i, e-jx-i)
where
a= (Flo + Fa• +Fa~ + Fp 1 + Fp3 + Fpa)(ef"'i, e-j1ri)
b = (Faa+ Fa:s +Fa + Fp~ + Fp. + Fp6 )(e-ill'i, eill'i)
c = (Fa +Faa + Fa:s + Fp~ + Fp4 + Fp6 )(efll'i, e-jx-i)
d = (F1 0 + Fa• +Fa~+ Fp3 + FPa + FpJ(e-f"'i, ef11'i)
A-100

![arXiv:1610.09010v3 [math.RT] 26 May 2017Hecke algebras, the Brauer and BMW algebras, walled Brauer algebras, Jones–Temperley–Lieb algebras, as well as centralizer algebras for](https://img.pdfslide.us/doc/110x75/5e54aa9ed50abe21bd3f9542/arxiv161009010v3-mathrt-26-may-2017-hecke-algebras-the-brauer-and-bmw-algebras.jpg)









![arXiv:2004.05596v1 [math.RA] 12 Apr 2020 · GRADED ALGEBRAS, ALGEBRAIC FUNCTIONS, PLANAR TREES, AND ELLIPTIC INTEGRALS VESSELIN DRENSKY Dedicated to the 70-th anniversary of Antonio](https://img.pdfslide.us/doc/110x75/5f36d8269fcd663bef31069a/arxiv200405596v1-mathra-12-apr-2020-graded-algebras-algebraic-functions-planar.jpg)















