Embed Size (px)
Citation preview

4.7 1
BUILDING A STOCHASTIC TERMINAL AIRSPACE CAPACITY
FORECAST FROM CONVECTIVE WEATHER FORECASTS
Diana Michalek∗
and Hamsa Balakrishnan
Massachusetts Institute of Technology, Cambridge, Massachusetts
1. INTRODUCTION
The global commercial aviation industry gener-ated $485 billion dollars in 2007, after a steady in-crease in revenue over the last decade. In the UnitedStates alone, this activity included 660 million pas-senger enplanements and the transport of over 11million tons of freight (IATA, 2008; Bureau of Trans-portation Statistics, 2008a). This increase in de-mand for air travel has coincided with increased de-lays in the National Airspace System (NAS). Ac-cording to Joint Economic Commitee Majority Staff(2008) estimates, the annual cost of domestic airtravel delays to the U.S. economy was $41 billionin 2007. This figure includes $19 billion in coststo airlines, and $12 billion in costs to passengers.What’s more, 76.9% of NAS delays in 2007 wereweather-related, an increase over previous years (Bu-reau of Transportation Statistics, 2008b). This situ-ation will only get worse, as demand for airspace isprojected to climb further in the coming years, andit will become increasingly important to operate theairspace system efficiently even in the face of storms(IATA, 2007).
Researchers have been working on the challengeof minimizing delays for several decades, mostly inthe field of Air Traffic Flow Management (ATFM).ATFM is the process of making strategic decisions afew hours ahead of the time of operations, to balancethe demand for aircraft operations with the capac-ity of the NAS. The capacity of airspace is affectedby the presence of hazardous weather, since aircraftmust avoid unstable regions and are often forced todeviate from their planned trajectories. Historically,ATFM models have taken expected capacity to bea known input, and have only focused on optimiz-ing routing decisions based on this input. Underclear weather conditions, these expected capacitiesare fairly stable and tend to reflect reality. However,under stormy weather conditions, capacity is highly
∗Corresponding author address: Diana Michalek, 77 Mas-
sachusetts Avenue, Bldg. E40-149, Cambridge, MA 02139.
E-mail: [email protected]
variable, and the use of estimated capacity for plan-ning is unrealistic. More recently, researchers havedeveloped stochastic models for TFM, which take asinput a probabilistic weather forecast or a probabil-ity distribution for capacity.
The missing piece has been a realistic model ofairspace capacity under hazardous weather condi-tions. Such a model is critical for decreasing weather-related delays, yet it has been a challenging prob-lem due to the chaotic nature of weather and to theunique requirements of ATFM forecasts. More con-cretely, forecasts for ATFM must be reasonably pre-cise and fine-grained. Knowing that there is a 30%chance of rain in Boston today, for instance, doesnot help to determine if there will be a route openfrom the east into Boston Logan Airport at 5PM, orif flights should incur delay on the ground and avoidentrance into Boston between 5 and 9PM.
In this paper we present the first steps towardscreating a stochastic forecast of terminal capacity,by using currently available weather forecasts. Wefocus on terminal airspace, or airspace surroundingan airport, since it is the bottleneck of aircraft op-erations. We consider a scenario in which short-term routing decisions must be made based on avail-able forecast data. We find that the quality of aforecast can be measured in terms of how likely itis for a trajectory through forecast weather to beblocked by true weather conditions. This leads toa model for route robustness, which correlates fea-tures of a particular trajectory with blockage. Wepresent the steps taken in creating this model, aswell results using weather forecast data for Hartfield-Jackson Atlanta International Airport (ATL) termi-nal area from the summer of 2007. In addition, weshow how route robustness can be mapped into aprobabilistic forecast of terminal airspace capacity.Although this work focuses on the terminal area, themethodology developed can be modified to modelen-route airspace.
The structure of this paper is as follows. Sec-tion 2 gives an overview of relevant TFM modelsand existing weather forecast research and opera-

tional products. Section 3 introduces the LincolnLab Convective Weather Forecast, which is used inthis work. Section 4 describes the issues with try-ing to model capacity by studying errors in weatherforecasts at individual pixels. Section 5 introducesa trajectory-based approach to modeling capacity,and contains the main contributions of this paper.Finally, Section 6 contains conclusions and futurework.
2. RELATED WORK
In this section we present Traffic Flow Manage-ment models whose objectives include minimizingdelays. These models take as input airspace capac-ity or weather conditions. In addition, we brieflydescribe currently available forecasts of airspace ca-pacity and weather. This discussion will highlightthe gap between TFM input requirements and thestate of weather forecasting.
2.1 ATFM Models
Early work in TFM involved large-scale integerprogramming models which determined how to routea set of aircraft from their planned departure loca-tions to their planned destinations while minimizingthe cost of delays. Capacity was the major systemconstraint and limited how many aircraft could si-multaneously occupy a region of airspace. Modelsinvolving both a static set of capacities for each sec-tor of airspace, as well as multiple capacity scenar-ios, each associated with a probability of occurrence,were developed (Bertsimas and Patterson, 2000; Bert-simas and Odoni, 1997).
More recently there has been work on algorithmsto efficiently synthesize routes through regions ofairspace affected by convective weather. This workrequires fine-grained and time-varying weather fore-cast data as static weather input, and focuses on syn-thesizing short and flyable routes which do not gettoo close to regions of airspace impacted by weather(Prete and Mitchell, 2004; Krozel et al., 2006). How-ever, the weather forecasts are treated as groundtruth, and routes are not evaluated against actualweather scenarios.
Finally, the Route Availability Planning Tool(RAPT) product uses Lincoln Lab ConvectiveWeather Forecasts to model jet route blockage de-terministically. The product is used operationallyto help controllers determine if aircraft can take off(DeLaura and Allan, 2003).
2.2 Capacity Estimation
Some recent work has begun to look at the prob-lem of creating stochastic models of capacity. Krozelet al. (2007) considers the problem of estimating thecapacity of a sector of en-route airspace by comput-ing a theoretical capacity given weather in the re-gion. This is done through the application of con-tinuous maximum flow theory. However, this workrelies on static weather forecasts and does not incor-porate uncertainty intervals or any measure of fore-cast accuracy. This research is taken a step furtherby Mitchell et al. (2006), which considers weatherforecasts accompanied by a region of uncertainty.However, the uncertainty profiles are randomly gen-erated.
We expand on this line of research by using max-imum flow theory to help identify bottlenecks in re-gions of airspace, and to help synthesize routes whichare then validated against observed weather.
2.3 Convective Weather Forecasts
There are several aviation weather forecasts avail-able for the United States. In general, weather fore-casts take the form of a grid, where each grid cell,or pixel, corresponds to a 2-dimensional section ofairspace. Each pixel is associated with a value indi-cating the severity level of weather at that point.
MIT Lincoln Laboratory’s Convective WeatherForecast product is a state-of-the-art 0-2 hour fore-cast, used throughout the United States to aid airtraffic control (Wolfson et al., 2004). The forecast isstatic, meaning that each pixel contains one deter-ministic value indicating weather severity, with noadditional estimate of the likelihood that the fore-cast is correct, or a distribution over possible sever-ity. Specific details about the forecast are providedin Section 3.
Due to randomness in the weather and the result-ing inaccuracy of weather forecasts, creating a planfor routes is not realistic using static forecasts alone.Indeed, flying through a region of airspace that turnsout to be stormy would compromise safety. Thishas lead to research into developing probabilisticweather forecasts for aviation. NCWF-2 is one suchforecast developed by the National Center for Atmo-spheric Research, which at each pixel gives a proba-bility p that the pixel will contain convective weather.Initial validation of the forecasts show that these val-ues of p have significant errors associated with them,and tend to be large overestimates of true values(Seseske et al., 2006).
Another probabilistic weather forecast that hasbeen proposed is based on polygons (Sheth et al.,
2

150 149 140
152 142150
125
128
151 147 142 128
107
109
109
147 142 129 118
88
105
88
87
82
72127
102
124 118
102 98
105 89
89 72 56
1 km
1 km
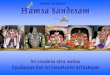
Figure 1. Sample Lincoln Lab Convective WeatherForecast near ATL.
2006). In this model, a weather cell is representedby a polygon, and the probability that weather willoccur at a point in the polygon decreases with in-creased distance from the center. This structure isthen used to estimate flight lengths and deviationdelays. However, the model is not validated againstbehavior of weather, and for the polygons to havemuch meaning, they might have to be very largeand hence not useful for fine-grained ATFM.
3. LINCOLN LAB CONVECTIVEWEATHER FORECAST
In order to create a realistic model of terminalarea capacity, it is necessary to start with some avail-able weather forecast. In this section we present thedetails of Lincoln Lab’s Convective Weather Fore-cast (CWF), which we use in modeling terminal ca-pacity.
The 0-2 hour CWF consists of a grid of 1km x1km pixels covering a region of the NAS (Wolfsonet al., 2004). The region will contain the entire con-tinental United States as of 2008, though we onlyuse data from Atlanta’s Hartsfield-Jackson Airport(ATL) for the purposes of this work. Each pixel con-tains a value of Vertically Integrated Liquid (VIL),indicated by an integer value in the range [0, 255].Figure 1 shows a sample forecast for ATL. A VILvalue above a certain threshold (133, in practice)corresponds to weather of severity level 3 or higher,which is commonly considered hazardous weatherthat pilots are thought to avoid. A forecast has ahorizon every 5 minutes between 5 and 120 minutes,and is updated every 5 minutes. In other words, attime T0, forecasts are available for time T0 + 5, T0 +10, T0+15, . . . , T0+120. The forecast data is accom-panied by observed VIL values for the same regionof airspace at that time, allowing for validation ofthe quality of the forecast.
This static forecast is useful in obtaining a gen-
eral idea of what weather will look like, and is usedin various decision support tools by air traffic con-trollers and airlines. Lincoln Lab, as well as otherforecast products, provide daily statistics such asrates of false positives, false negatives, and a skillscore, but these vary daily and by storm. However,no large-scale historical validation of accuracy hasbeen performed.
The natural first step in modeling airspace ca-pacity is to see if historical trends in forecast skillcan be correlated with capacity. In effect, it seemsdesirable to compute the conditional distribution ofactual weather given a forecast. This approach isfurther discussed in the next section.
4. A PIXEL-BASED MODEL
One possible approach to developing a stochas-tic model of airspace capacity using deterministicforecast data is to determine a distribution for theprobability that hazardous weather occurs at pixel x
given the forecast value at pixel x. This probabilis-tic forecast can then be mapped into a distributionfor capacity. This section discusses our attempts inthis direction, and the associated issues.
Let wx(t) be the observed weather at pixel x attime t. Let fx(t, τ) be the τ -minute weather forecastfor pixel x at time t. In other words, fx(t, τ) is theforecast made at time t − τ for time t. We wouldlike to know the conditional distribution Pr(wx(t) =v | fx(t, τ) = u). Note that this distribution wouldlikely be independent of the pixel x, but might de-pend on the geographical area.
After trying to approximate this distribution us-ing historical weather data from 8 days of stormyweather conditions surrounding ATL, we found thatthe deterministic forecasts have large errors whenmeasured using this metric, making their use forATFM potentially problematic.
Figure 2 shows a sample of results from this ap-proach. The two figures contain a histogram of theVIL that actually occurred after a VIL of level 3(VIL in the range [133, 162]) was predicted, for fore-cast horizons of 30 and 60 minutes. Although bothplots look like they have a roughly Gaussian curve,even the 30-minute forecast results in non-hazardousweather more than half of the time. This wouldtranslate to wasted capacity if the static forecastwere followed.
Several conclusions can be reached from these re-sults. First, it is possible that the forecasts get thegeneral weather trends right, but are incorrect in theposition of the weather cells. This turns out to be amajor shortcoming of the pixel-based approach. A
3

0 50 100 150 200 2500
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
Actual VIL
Cou
nt
Histogram of Actual Weather for a Level−3, 30−minute forecast in ATL.070605 070608 070614 070615 070619 070625 070628 070619
57.1%
42.9%
mean − 118.48
stddev − 47.58
max − 146
0 50 100 150 200 2500
2000
4000
6000
8000
10000
12000
14000
Actual VIL
Cou
nt
Histogram of Actual Weather for a Level−3, 60−minute forecast in ATL.070605 070608 070614 070615 070619 070625 070628 070619
68.6%
31.4%
mean − 100.41
stddev − 54.90
max − 3
Figure 2. Plot of true VIL when Level 3 VIL (in the range [133, 162]) is forecast. Results for 30-minute and60-minute forecast are on the left and right, respectively.
10km x 10km storm cell forecast, for example, mightbe displaced by 10km to the west when observed, re-sulting in no correct pixel predictions. For planningpurposes, however, this forecast is quite good be-cause moving an aircraft’s planned trajectory 10kmeast might be acceptable.
Along similar lines, different storm types havedifferent implications for ATFM. A storm consistingof many small sparsely distributed cells of weatheractivity (called a popcorn storm), might have verylow forecast accuracy in pixel-by-pixel comparisons,because it is hard to predict the exact location of asmall cell. However, there may be routes throughthe non-stormy sections between the popcorn cells,resulting in no practical loss in capacity.
These observations suggest that a route-centricapproach may be a better way to think about weatherforecasts used for TFM. Identifying persistent routesthrough weather might identify opportunities for in-creased capacity even in the presence of storms andof inaccurate forecasts. The remainder of this paperoutlines how we validate static forecasts and corre-late path characteristics with capacity.
5. ROUTE-BASED CAPACITY FORECAST
The main contribution of this paper is a route-based approach to modeling terminal airspace ca-pacity. In this section we first formalize the ter-minal area capacity problem. Then we describe ourdata-driven approach to measuring the robustness ofa trajectory through airspace. The high-level steps
taken are: 1) Compute the theoretical capacity ofa region R of airspace using an algorithm for con-tinuous maximum flow developed in Mitchell (1988)and Mitchell et al. (2006). The resulting minimumcut contains the bottlenecks for flow in R. 2) Usethe minimum cut to generate paths through R bysolving set of integer programs. 3) For each gener-ated path p, solve another linear program to find apath p′ in the neighborhood of p, in the observedairspace. 4) Using data from steps 2 and 3, build amodel for the probability that a route will be avail-able by correlating blockage with various features ofa path in the forecast space, such as mean distanceto weather. 5) Use this model for path robustness todetermine a probability distribution for the capacityof R.
5.1 Problem Formulation
Consider the following version of the terminalairspace capacity problem. The input is a termi-nal area, defined by two concentric circles: an outercircle CO of radius R, and an inner circle CI of ra-dius r. The outer circle CO represents the points atwhich aircraft first enter the terminal airspace, andR is typically about 40 nautical miles, or 75 km. Theinner circle CI represents the point at which aircraftstart their final descent into the airport. Figure 3illustrates the model of the terminal area described.
We are interested in determining the answers tothe following questions:
4

Rr
LL forecastCO
CI
Figure 3. Model of terminal area flow. Flow comesin through the outer circle of radius R, CO, and intothe inner circle CI . The red region within the ter-minal region represents a weather hazard accordingto the static weather forecast for some time t.
1. If aircraft arrive at C0 t minutes from the cur-rent time, how many will be able to get throughto CI? This is the question of theoretical ca-pacity.
2. If aircraft are routed along trajectories that areclear according to the t-minute weather fore-cast, what is the probability that that thesetrajectories will be clear in the weather thatactually materializes?
This paper aims to answer the second question.We believe this question is an important one for airtraffic control for several reasons. First, it aims tocapture trends in how true weather cells differ frompredictions. And second, it better takes into accountthe realities of scheduling aircraft routes. Theoret-ical capacity might suggest that N aircraft will beable to enter airspace over the next hour, but maynot indicate the possibility (which is critical for plan-ning) that these aircraft must necessarily arrive fromthe West, for instance. Furthermore, it is possiblefor a forecast of theoretical capacity to exactly matchthe true theoretical capacity, yet require that aircraftuse trajectories that are very far from original plans.
5.2 Dynamic Weather Grid
Since we assume that aircraft move inwards to-wards the airport from the outer circle, we can splice
together weather data for time instants t that in-crease from the outer to inner circle. This effectivelycreates a dynamic weather grid.
Figure 4. Sample forecast region, created by splicingtogether consecutive 5-minute forecasts. This is fora 30-minute time horizon on July 29, 2007, whereaircraft reach the outer circle at time 21:00. Theregions with Level 3 and higher weather become ob-stacles in the forecast grid.
Figure 4 illustrates how this is done, showing asample aircraft coming in, for reference. We assumeaircraft arrive at CO at time t, with a t0- minutetime horizon. This captures all planning that canoccur at time t − t0.
5.3 Synthesizing Paths
Given a t0-minute time horizon, we can modelpaths through airspace which are likely to stay open.Our approach is a data-driven approach to explor-ing route robustness. This section outlines the stepstaken in creating a dataset of paths through weather-constrained airspace.
Theoretical Capacity
First we compute the theoretical capacity in adynamic forecast grid. This computation identifiesthe bottlenecks for flow in the region. To computethe theoretical capacity, we follow the developments
5

on continuous maximum flow extended to the caseof airspace in Mitchell et al. (2006), Krozel et al.(2007), and Mitchell (1988). This work presents apolynomial-time algorithm for computing the maxi-mum flow through a polygon with holes, from a setof source edges to a set of sink edges. In our case, thepolygon represents the terminal airspace, the holesrepresent weather, and C0 and CI are sets of sourcesand sinks, respectively. The algorithm involves thecreation of a discrete critical graph, where a shortestpath through this graph gives the cost of the mini-mum cut through the continuous region, and is alsoequal to the maximum flow.
The minimum cut gives the bottleneck for flowthrough the airspace, and all trajectories would nec-essarily have to pass through this bottleneck region.
Finding Paths in the Forecast Grid
We identify potential aircraft trajectories throughthe forecast grid by solving the following modifiedshortest path problem as an integer program:
Given a snapshot of the weather forecast for theterminal region taken at time t− t0, construct a di-rected graph G(N ,A) such that the set of nodesN contains all pixels free of weather hazards, andeach set of adjacent nodes form an arc a ∈ A aslong as the arc moves towards the center. At timet, a unit of flow is sent from a set of source nodesS = {s1, . . . , sl} ⊆ N to a set of sink nodes T ={t1, t2, . . . tm} ⊆ N , and must pass through a nodeK ∈ N . K could correspond to points of interest,such as the midpoint of the minimum cut or arrivalgates. For simplicity, we use a standard transfor-mation and introduce a supersource S̄ and a su-persink T̄ , and route one unit of flow between thetwo through the source nodes and sink nodes (Ahujaet al., 1993). Define NX(i, j) to be the node k ∈ Nwhich constitutes a straight next arc if (i, j) is used.In other words, nodes i, j, k form a straight line inthe weather grid, pointing towards the center. Theobjective is to find the minimum cost flow f suchthat out of all minimum cost flows, f has the mini-mum number of turns.
This problem is modeled by the IP below, andcan be solved with different sets of sources and sinksand nodes K to generate a large set of candidatepaths for a given weather forecast scenario.
xij := flow on arc (i, j) ∈ A
zij := 1 if (i, j) ∈ A is a turn, 0 otherwise.
min∑
(i,j)∈A
cijxij + λ∑
(i,j)∈A
zij
s.t.∑
j∈N :(i,j)∈A
xij −∑
j∈N :(j,i)∈A
xji = bi ∀i ∈ N (1)
∑
j∈N :(K,j)∈A
xKj = 1 (2)
zij ≥ xij −∑
k∈NX(i,j):(j,k)∈A
xjk ∀(i, j) ∈ A (3)
x ∈ {0, 1}n (4)
z ∈ {0, 1}n (5)
Constraints (1) are the flow balance constraints,with bi := −1 for a supersource S̄, bi := +1 fora supersink T̄ , and bi := 0 for all other nodes i
in N . Constraint (2) ensures that the path goesthrough node K. These first two constraints alongwith the non-negativity constraint (4) finds shortest-paths through the airspace region. However, theseconstraints alone do not limit the number of turns inthe resulting trajectory. It is however desirable thataircraft trajectories have a limited number of turnsfor simplicity. Constraints (3) serve to minimize thenumber of turns in the path without changing thepath length. All arcs that follow (i, j), except (j, k)for k = NX(i, j), pay a penalty in the objective func-tion. We set λ to be sufficiently small (less than themaximum length of any path) to ensure that a longerroute but with fewer turns is never chosen. Finally,x and z are binary variables because a single pathcannot be split up, and the existence of a turn is abinary quality.
We generate paths for many pairs of source andsink sets, each passing through each segment of theminimum cut.
Validating Paths in Observed Weather Grid
Given a set of paths through a region of airspace,we validate the paths against observed weather. Wedefine a route u as open if there exists a correspond-ing route in the forecast grid which is within B kmof u and does not pass through any actual weatherhazards.
We synthesize open routes by solving an IP iden-tical to the one defined in the previous section, ex-cept over a modified graph G′(N ′,A′), and withoutthe requirement of passing through node K. G′ cor-responds to the dynamic grid of observed weatherin the neighborhood of u. N ′ contains all nodes in
6

the truth grid that are within B km of the fore-cast route u, and A′ contains all pairs of adjacentnodes in N ′. The buffer B allows for slight pertur-bations in the path (on the order of several kilome-ters), which represents only a slight change from theoriginal planned trajectory of u.
Figure 5 contains a few examples of routes syn-thesized in the forecast gird, side-by-side with thesame routes validated against true weather. Weatherscenarios corresponding to time horizons of 10, 30,and 60 are included to show the difference in pixelaccuracy at different forecast horizons. The figurealso shows two routes that become blocked, and onethat remains open, subject to slight changes in theplanned trajectory.
5.4 Creating a Dataset of Routes
This section describes details of steps taken togenerate a dataset of trajectories through forecastweather with corresponding trajectories through trueweather.
Selection of Weather Scenarios
A dataset was created containing routes for sev-eral weather scenarios during the 18 worst weatherdays in June and July 2007, ranked according toweather-related delays.
Though the Lincoln Lab CWF data as describedis simply a matrix of integers in the range [0, 255],the archives of this data are kept in a proprietaryformat, and each day of data takes several hoursto extract and decompress, leaving 30 GB of un-compressed binary data. To identify the times ofday which contain stormy weather, we extracted theforecasts for airspace surrounding ATL and watchedvisualizations of the entire two month time periodto identify the stormiest hours. This resulted in anaverage of 4 weather scenarios per day, spaced 30minutes apart, for a total of over 300 trajectories inforecast weather. Four datasets were created, cor-responding to the 10, 30, 60, and 90 minute timehorizons.
Dataset Details
Tables 1 contains overall statistics of route block-age for the datasets. The vast majority of synthe-sized routes end up being open in the true weathergrid, even for a time horizon of 60 minutes, whichhad poor pixel-based accuracy. This suggests thatsubject to minor adjustments, planning at a 10-, 30-,60-, and 90-minute time horizon is quite reasonable.This is encouraging, and shows that moving awayfrom fixed jet routes gives us the flexibility in the
airspace to allow that to happen.
Horizon t0 Size (# Paths) Viability rate (%)10 356 8730 369 8760 335 8090 323 74
Table 1. Overall dataset statistics. Each timehorizon contains over 300 paths through differentweather forecast scenarios, and the viability rateshows the rate that these routes are viable in ob-served weather.
For each path, eight features of interest were in-dentified and each feature was correlated with routeblockage. The eight features, chosen for their possi-ble correlation with route blockage, are listed below:
1 Mean VIL along path2 Standard Deviation of VIL along path3 Min distance to level 3+ weather along path4 Mean distance to level 3+ weather along path5 Number of turns in path6 Theoretical capacity for weather scenario7 Number of segments in the minimum cut8 Length of path’s minimum cut segment
5.5 Robust Routes
This section introduces a method for route ro-bustness based on creating correlations of featureswith blockage.
Figure 6. Individual features give conditional prob-abilities of route blockage. This figure shows thisprobability (black line) as well as raw data (his-togram) for Feature 4 at a 30-minute time horizon.
7

Figure 5. Sample routes in a dynamic forecast grid on are in the left-hand column, and corresponding routesin the actual weather are on the right-hand column. The top weather scenario is from June 8, 2007 at1930hrs with 10-minute time horizon. The second is from June 28, 2007 at 2300hrs with 30-minute timehorizon. The bottom is from June 8, 2007 at 2100hrs with 60-minute time horizon. Notice that the middleroute is viable in the observed weather, while the other two are not.8

Intuitively, if a route through airspace is openaccording to the forecast, but has an average VIL ofjust below Level 3, we expect it is more likely to beblocked in the actual weather than a similar routewith average VIL at Level 0. Using this idea, weestimate the conditional probability that a route isblocked given its value for various features. The fol-lowing equation is used to compute these conditionalprobabilities:
P( u blocked |fi(u) = v) =P(fi(u) = v & u blocked)
P(fi(u) = v)(6)
=#(blocked & fi = v)
#(fi = v)(7)
where fi(u) is the value of Feature i for route u.Since the denominator in equation 7 may be 0 in
the case of continuous data, the feature values mustbe binned where necessary. Due to sampling error,these conditional probabilities contain some noise.To account for this noise, smoothing was used tocreate revised estimates of the desired conditionalprobabilities. The smoothed conditional probabilityP( u blocked |fi(u) = v) was computed by takingthe average of 5 neighboring bins (bin v as well as 2bins on each side of v), weighted by the number ofpaths in each bin.
Figure 6 shows a histogram of the raw data forFeature 4 in the 30-minute time horizon. The green(red) section of the bar shows how many routes hav-ing value v ended up being open (blocked) when theroute was validated against true weather conditions.In addition, the light gray line overlaying the plotshows the raw conditional probabilities as computedby equation (6), along with confidence intervals. Theblack line corresponds to the smoothed conditionalprobability that a route is blocked given Feature 4.
Similar correlations for a few other features at10- and 60- minute time horizons are show in Fig-ure 7 and Figure 8. The remaining features and timehorizons are omitted in the interest of space con-straints. Looking at these figures, there is correla-tion between features and blockage, and the correla-tion is especially strong for the shorter time horizonof 10 minutes. This is to be expected, since weatherforecasts for a shorter time horizon are known to bemore accurate. We see for mean VIL (Feature 1),standard deviation of VIL (Feature 2), and numberof turns (Feature 5), that as the value of the fea-ture increases, so does likelihood of blockage. Thesetrends agree with intuition. Indeed, high VIL val-ues along a path indicate the route moves through
some weather-affected regions, which are more likelyto show up as level 3 or higher in the true weather.Likewise, higher standard deviation of VIL indicatesincreased variability in weather conditions along thepath, and hence higher likelihood that weather willmaterialize. And a high number of turns indicatethat a route requires lots of maneuvering to avoidweather, so is more likely to be exposed to movingcells. For feature 3 (minimum distance to weather),we see that synthesized routes that are very closeto weather end up being blocked more of the time,and that routes that are very far from any fore-cast weather stay viable. The same trend is foundwith average distance to weather (Feature 4). Fi-nally, theoretical capacity (Feature 6) shows the gen-eral trend that increased theoretical capacity cor-relates with decreased likelihood of being blocked.The plots for Feature 7 were left out, because theyshowed very little correlation with blockage. This isprobably because the number of segments in a mini-mum cut can occur both if the theoretical capacity isvery high (there is 1 large cut segment, for instance),or very low (there is a very small cut segment). Thehigh capacity case would make routes more likely tobe viable, since they are less likely to be close to ad-verse weather cells, while the reverse is true for lowcapacity.
5.6 From Routes to Capacity
The route blockage model can be used to create astochastic model of capacity. This section presentsan initial version of such a model. For an airportwith m arrival gates (in the case of ATL, m = 4),and for a given time horizon t0, we can forecast ca-pacity in the following way. First, four routes aresynthesized through the forecast grid, each sourcedfrom a different quadrant of the outer circle CO.This can be done using the IP in Section 5.3. Next,for each synthesized route, let the overall viabilityrate for the given time horizon (listed in Tables 1)be the probability that the route will be blocked inthe true weather grid. Let C be the clear-weathercapacity of the airspace. Then the capacity of thethe airspace can be forecast as Ck
mwith probability
Pr( exactly k of the synthesized routes are open),which will be a binomial distribution.
6. CONCLUSION
A route-based approach to modeling airspace ca-pacity turns out to be fruitful for estimating airspacecapacity using actual weather data. By analyzingstormy weather data from the summer of 2007, wewere able to show that certain features of a candidate
9

Figure 7. Plots showing how the values of the first 6 features correlate with route blockage at a 10-minutetime horizon. The histogram showing the distribution of feature values and blockage is overlaid with thesmoothed probability that a route is blocked given each feature value. Features 2, 3, and 4 correlate especiallywell.
Figure 8. Plots showing how the values of the first 6 features correlate with route blockage, for 60-minutetime horizon.
10

trajectory through airspace correlate with blockagein true weather. We found that VIL levels along thetrajectory and in neighboring regions, along withthe complexity of the route (number of turns), tobe good individual predictors for blockage. Further-more, we introduced an integer program for syn-thesizing turn-constrained routes through forecastregions, which turned out to produce routes thattended to be viable in the true weather grid, sub-ject to slight shifts in position. This is promising forshort-term route planning under uncertain weatherconstraints. Future work includes the incorporationof departures, additional weather features such asecho tops, and ultimately, using these probabilisticcapacity forecasts for ATFM.
7. Acknowledgments
The authors are grateful to Marilyn Wolfson, RichDe Laura and Mike Robinson at MIT Lincoln Labfor help with CIWS data and fruitful discussions.
References
Ahuja, R. K., T. L. Magnanti, and J. Orlin, 1993:Network Flows: Theory, Algorithms, and Appli-cations. Prentice Hall.
Bertsimas, D. and A. Odoni, 1997: A critical surveyof optimization models for tactical and strategicaspects of air traffic flow management. Tech. rep.,NASA Ames Research Center.
Bertsimas, D. and S. S. Patterson, 2000: The trafficflow management rerouting problem in air trafficcontrol: A dynamic network flow approach. Trans-portation Science.
Bureau of Transportation Statistics, 2008a: http:
//www.transtats.bts.gov/.
Bureau of Transportation Statistics, 2008b: Un-derstanding the reporting of causes of flightdelays and cancellations. http://www.bts.gov/
help/aviation/html/understanding.html, Re-trieved 19 April 2008.
DeLaura, R. and S. Allan, 2003: Route selectiondecision support in convective weather: A casestudy. USA/Europe Air Traffic Management R&DSeminar, Budapest.
IATA, 2007: Passenger and Freight Forecasts 2007to 2011. http://www.iata.org/NR/rdonlyres/
E0EEDB73-EA00-494E-9408-2B83AFF33A7D/0/
traffic_forecast_2007_2011.pdf.
IATA, 2008: Industry Statistics Factsheet.http://www.iata.org/NR/rdonlyres/
65A3F2C3-3656-4243-8396-3D77CB31C2FC/
0/factsheet_industry_stats_apr20082.pdf,Retrieved 19 April 2008.
Joint Economic Commitee Majority Staff, 2008:Your flight has been delayed again. Tech. rep.
Krozel, J., C. Lee, and J. S. B. Mitchell, 2006: Turn-constrained route planning for avoiding hazardousweather. Air Traffic Control Quarterly, 14 (2),159–182.
Krozel, J., J. S. B. Mitchell, V. Polishchuk, andJ. Prete, 2007: Capacity estimation for airspaceswith convective weather constraints. AIAA Guid-ance, Navigation and Control Conference and Ex-hibit, Hilton Head, South Carolina.
Mitchell, J. S., 1988: On maximum flows in polyhe-dral domains. SCG ’88: Proceedings of the fourthannual symposium on Computational geometry.
Mitchell, J. S. B., V. Polishchuk, and J. Krozel,2006: Airspace throughput analysis consideringstochastic weather. AIAA Guidance, Navigation,and Control Conference, Keystone, Colorado.
Prete, J. and J. S. B. Mitchell, 2004: Safe routingof multiple aircraft flows in the presence of time-varying weather data. AIAA Guidance, Naviga-tion, and Control Conference and Exhibit, Provi-dence, Rhode Island.
Seseske, S. A., M. P. Kay, S. Madine, J. E. Hart, J. L.Mahoney, and B. Brown, 2006: 2006: QualityAssessment Report: National Convective WeatherForecast 2 (NCWF-2). Submitted to FAA Avia-tion Weather Technology Transfer (AWTT) Tech-nical Review Panel.
Sheth, K., B. Sridhar, and D. Mulfinger, 2006: Im-pact of probabilistic weather forecasts on flightrouting decisions. AIAA Aviation Technology, In-tegration and Operations Conference, Wichita,KS.
Wolfson, M., et al., 2004: Tactical 0-2 hour convec-tive weather forecasts for FAA. 11th Conferenceon Aviation, Range and Aerospace Meteorology,Hyannis, MA.
11





















![LEM Education Model[1]](https://img.pdfslide.us/doc/110x75/577d2abb1a28ab4e1ea9f0a8/lem-education-model1.jpg)