Embed Size (px)
Citation preview

Buckling of bilayer laminates: A
novel approach to synthetic papillae
Sachin S. Velankar, Derek Breid, Sourav Chatterjee, Jiani Niu,
Victoria Lai, Rachmadian Wulandana
Department of Chemical Engineering
University of Pittsburgh
Collaborator: Roger T. Hanlon, Paloma Gonzalez, Justine Allen,
Trevor Wardill
Marine Biological Laboratory
Woods Hole, MA

Buckling of bilayer laminates: A novel approach to synthetic papillae
Research goals
• Discover details of
papillae expression and
elucidate biomechanics
• Practical implementation
of synthetic papillae
• FEM modeling of
complex materials
Current Impact
• Developed easy-to-use
method for simulating
elastic instabilities
• New platform for
reversibly morphing
surfaces
• Image analysis software
for analyzing active skin
mechanics
Planned Impact
• Elucidate biomechanics
of papillae expression
• Easy-to-use method for
simulating shape changes
of muscular hydrostats
Status quo
• Cephalopods can
camouflage themselves by
expressing papillae to change
the texture of their skin.
• The biomechanics of
papillae expression is not
known. Muscular hydrostat
and skin buckling are two
hypotheses.
• No demonstrations of
reversible surface texture at
the flip of a switch in synthetic
systems.
New insights
• Cuttlefish skin can strain few
10% in-plane. Indentation
modulus is ~ 1kPa.
• Reversible surface texture
can be realized even with
small strain compression by
driving elastic instabilities.
Main Achievements : Numerical
modeling of muscular hydrostats:
Easy-to-use; can predict shape
changes due to complex
arrangements of muscles
How it works: Specify muscle
arrangement as am orientation field.
Specify shrinkage along muscle
direction & volume-conserving
expansion orthogonally. Solve FEM
model
Limitations: Muscle force model is
inexact: only shape changes can be
predicted; no forces or speeds
Model of constant-volume muscle
deformation raising a papilla
Main Achievement: Composites of
shape-memory alloys (SMAs) and
elastomers as a platform for
reversibly morphing surfaces. Rapid,
low-voltage operation.
How it works: Compressive strain in
elastomer can be harnessed to drive
buckling instabilities.
Limitations: “Tall” features difficult
to realize. Actuation is fast;
deactuation is limited by cooling
speed
Surface features at the flip of a switch
Main Achievements: Software for video
analysis of active skin
How it works: Image correlation algo-
rithms optimized to handle large changes
in mean color of the skin.
Limitations: Possible errors due to 3D
nature of papillae Rectangular grid distorts as skin
deforms
6V DC, ~30 s

Cephalopod camouflage
• Octopus, cuttlefish
• Texture control
• Mechanisms
– Compression-induced
skin buckling
– Muscular hydrostats
Picture courtesy Roger Hanlon
Kier, 1989

3: Program goals
• Biomechanics of papillae expression (collaboration with Roger
Hanlon)
– Examine musculature of papillae
– Measure mechanical properties of skin
• Implementation of synthetic texturing surfaces
– Mimic papillae using synthetic materials
– Implement surfaces that will texture in predetermined ways
• Numerical simulation
– Develop and validate random imperfection method for elastic instabilities
– Develop simulations for muscular hydrostats (added)

4: Progress towards goals
• Biological experiments
– Indentation experiments with AFM and non-AFM
– Automated video analysis of skin motion
• Implementation of synthetic papillae
– Development of SMA/elastomer composites for morphing surface
applications
– Implementation of morphing surfaces by buckling
• Numerical simulations
– Detailed validation of new technique for elastic instabilities
– Developing FEM simulations of muscular hydrostats
• Other related research enabled by this grant

4: Progress towards goals
• Biological experiments
– Indentation experiments with AFM and non-AFM
– Automated video analysis of skin motion
• Implementation of synthetic papillae
– Development of SMA/elastomer composites for morphing surface
applications
– Implementation of morphing surfaces by buckling
• Numerical simulations
– Detailed validation of new technique for elastic instabilities
– Developing FEM simulations of muscular hydrostats
• Other related research enabled by this grant

AFM trials
• Insufficient indentation
• What are we indenting?
– Single layer epithelial layer is
few microns thick
– Does the “zero” displacement
already indent the epithelial
layer
• Skin motion is a huge problem

New instrument: non-AFM
• Same principle as AFM but with 500 micron indentation
– Cantilever deflection probed optically
– Milligram forces can be measured
• Smaller with vibration table

Indentation results
• Modulus is ~ 0.86 kPa +/- 0.2
– Soft !
– But still comparable to other animal tissues
– May be much larger in orthogonal direction
• Not much difference between the papillae and non-
papillae region
– 0.86 on papilla vs 0.7 off papilla

Challenge for mechanical measurements
• “Fresh” skin is too active to be tested
~ 27 hours ~ 40 hours + warmed

Video analysis of active skin
• Sepia officinalis neural stimulation
– Paloma Gonzales and Justine
Allen @ MBL
• Quantify deformation
– How much area changes?
– How much stretching?
– Homogeneous or not?
• Autocorrelation analysis to track
displacements
– Changes in mean intensity cause
trouble
– Image processing algorithms must
be optimized

Particle tracking
• 30 - 40 % change in area
• Peak rate ~ 0.3 s-1
• Skin is under sufficient tension that it
does not buckle
• Currently applying this to more video
including live animal

4: Progress towards goals
• Biological experiments
– Indentation experiments with AFM and non-AFM
– Automated video analysis of skin motion
• Implementation of synthetic papillae
– Development of SMA/elastomer composites for morphing surface
applications
– Implementation of morphing surfaces by buckling
• Numerical simulations
– Detailed validation of new technique for elastic instabilities
– Developing FEM simulations of muscular hydrostats
• Other related research enabled by this grant

Overall idea
• Other buckling instabilities can be harnessed to realize “snapping”
behavior, directional buckling, wave motion…
smart material
smart material smart material
with controlled
delamination
without
delamination

Buckling for reversible texture
• This is viable
• Can we do this using “synthetic muscles”
– Rapidly at the flip-of-a-switch
– Reversibly
– Spatially-reconfigurable texture
• Develop composites of shape-memory alloys and elastomers as a
general platform

Surface texturing via buckling
• Reversible compression can drive buckling instabilities
– SMA-elastomer composites: General platform for reversible texture
– The surface film can be patterned for controlling shape of buckle
– Low voltage
– Spatial and directional control
• Implementation movie

Reversible surface texture at the flip of a switch
• Actuation at 4.5 V
– Have done this with 2xAA
• Strain ranges from 1.5 - 3.7%
– Max strain ~4.5% for bare SMA wire
• Even small strain can induce surface texture if we use it to drive
buckling
– Other buckling transitions can be driven too
– Delamination gives high amplitude too

Surface texture at the flip of a switch
• Fully reversible over several cycles
• Spatially reconfigurable
• Low voltage operation
• Modest temperature
• No moving parts
• Lengthscale can be tuned from few micron to cm
• Examine fundamentals…

Shear lag model with plane strain
• Shear transferred from the SMA to the elastomer
via shear stress at wire/elastomer interface
• Stress transferred to the elastomer to film
via shear stress at elastomer/film interface
• Film is linearly elastic
• Elastomer is linearly elastic
2 wewR
x
f
ef
dh
dx
f
f f
uE
x
f w
ef e
u uG
H

Shear lag model
– Stress builds up “from the ends”
– Film compression reduces for thick
films or compliant elastomer
2
2
12
f
f SMA
wf
f e
hEu x
REuhE G
x H
uf
Message #1: Stress transfer is critical
• Simply having a “strong” actuator is not sufficient: stress transfer
to the surface needs to be adequate
• Generally applicable to any type of embedded actuator trying to
induce surface strain
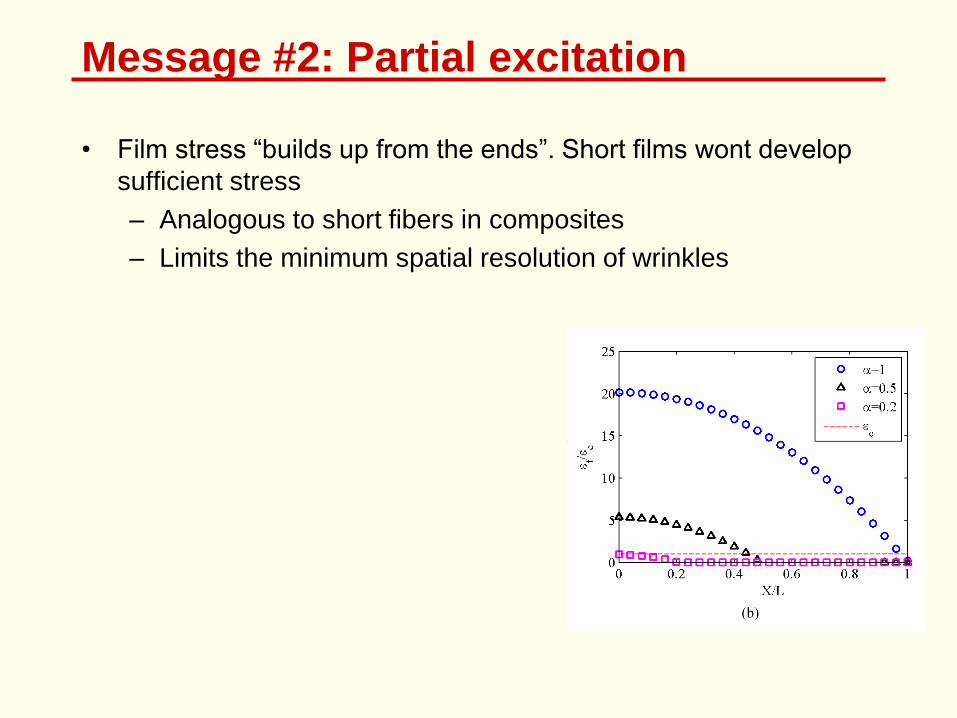
Message #2: Partial excitation
• Film stress “builds up from the ends”. Short films wont develop
sufficient stress
– Analogous to short fibers in composites
– Limits the minimum spatial resolution of wrinkles

4: Progress towards goals
• Biological experiments
– Indentation experiments with AFM and non-AFM
– Automated video analysis of skin motion
• Implementation of synthetic papillae
– Development of SMA/elastomer composites for morphing surface
applications
– Implementation of morphing surfaces by buckling
• Numerical simulations
– Detailed validation of new technique for elastic instabilities
– Developing FEM simulations of muscular hydrostats
• Other related research enabled by this grant

Progress on simulations
• Complete: Original proposal on FEM simulations of
buckling instabilities
• Now: developing models of muscular hydrostats

Muscular hydrostats
• Muscular structure that deforms at constant volume
Kier, 1989
contract tangential
muscle fibers
contract axial
muscle fibers
Allen, 2009

Musculature of a papilla
• Physical picture from MBL group
Movie : Basia Goszczynska Schematic Justine Allen

Modeling of muscular hydrostats
• Volume conservation: muscle shrinks along the muscle fiber direction
and expands orthogonally
• Capture complex arrangement of muscles
– Specify mean muscle fiber orientation
– Contract in that direction + expand perpendicular
• Muscles and non-muscle tissue behave elastically

Force models
• Strain and strain rate
dependence of force
Van Leeuwen and Kier, 1997
active passive

Input parameters
• Force model parameters
are not known
– Many are micro-scale
Van Leeuwen and Kier, 1997

uniaxial random in-plane
Minimal computation approach for shape changes
• Thermal expansion approach
– Usually isotropic
– Make anisotropic to conserve volume
specify geometry &
muscle fiber orientation actuate new shape

Validation
• Tentacle extension
• Papillae expression

Caveats
• Volume changes are small but not zero
– Few percent is typical
• Force model is not real
– Shape changes are good but no kinematic information

4: Progress towards goals
• Biological experiments
– Indentation experiments with AFM and non-AFM
– Automated video analysis of skin motion
• Implementation of synthetic papillae
– Development of SMA/elastomer composites for morphing surface
applications
– Implementation of morphing surfaces by buckling
• Numerical simulations
– Detailed validation of new technique for elastic instabilities
– Developing FEM simulations of muscular hydrostats
• Other related research enabled by this grant

Two other related projects
• Thin films supported by viscous liquids
• Swelling behavior of polymer films
• Both relevant to developing 3D surface features

Viscous-driven wrinkling
– Convenient for metrology in molten polymers
film
prestretched rubber membrane
viscous liquid

Validation
• 5 micron plastic film floating on viscous polymer
• Buckling is rate-dependent
– Not an equilibrium phenomenon
0.03 s-1 0.006 s-1

quantitative
• small film length: shear lag model
– stress builds up “from the ends”
• “infinite” film length: empirical
– non-linear after initial instability
viscous liquid thickness H
film thickness h
film length L

Swelling of polymer films
• Crosslinked polymer film swollen with solvent
• Buckle delamination
– Swelling causes compressive stress
– Compressive stress causes delamination
– Tsukruk : nanoscale
• Fold formation : buckle has a concentrated
curvature
– Tall folds persist after drying

Variety of folding patterns • Large parameter space
– film modulus
– film thickness
– drop volume
– nature of solvent…
• Drop volume has an interesting effect
– Perimeter delamination and folding
Map of pattern development
• Thin films and/or large drop volumes induce delamination and folding
• Evaporation behavior is also complex: self-adhering folds vs. blisters
corrals
no
delamination

5: Scientific or technological transitions
• Initiative with BioE folks at U. Pittsburgh about creating muscular
hydrostats
• Talking with COMSOL for implementing random modulus into their
software
6: Interactions with other groups and organizations
• William Kier, UNC
• Paul Ashby, LBNL
• Matt Shawkey
• Jeff Urbach & Dan Blair

7: Papers published in 2012 • Zhang, J.-T.; Wang, L.; Lamont, D. N.; Velankar, S. S.; Asher, S. A. "Fabrication of Large-
Area Two-Dimensional Colloidal Crystals", Angew. Chemie-Int. Ed. 2012, 51, 6117.
• Wolf, M. T.; Daly, K. A.; Brennan-Pierce, E. P.; Johnson, S. A.; Carruthers, C. A.; D'Amore,
A.; Nagarkar, S. P.; Velankar, S. S.; Badylak, S. F. "A hydrogel derived from decellularized
dermal extracellular matrix", Biomaterials 2012, 33, 7028.
• Velankar, S. S.; Lai, V.; Vaia, R. A. "Swelling-induced delamination causes folding of
surface-tethered polymer gels", ACS App. Mat. Int. 2012, 4, 24.
• Nagarkar, S. P.; Velankar, S. S. "Morphology and rheology of ternary fluid/fluid/solid
systems", Soft Matter , 2012, 8, 8464.
• Medberry, C. J.; Crapo, P. M.; Siu, B. F.; Carruthers, C. A.; Wolf, M. T.; Nagarkar, S. P.;
Agrawal, V.; Jones, K. E.; Kelly, J.; Johnson, S. A.; Velankar, S. S.; Watkins, S. C.; Badylak,
S. F. "Hydrogels Derived from Central Nervous System Extracellular Matrix", Biomaterials,
2012, in press.
• Zhang, J.-T.; Wang, L.; Chao, X.; Velankar, S.S.; and Asher, S. A., “Vertical spreading of
two-dimensional crystalline colloidal arrays”, J. Mater. Chem. C, 2013, in press.

Invited presentations
• “Interfacial jamming phenomena in ternary liquid/liquid/solid systems”,
Georgetown University, April 2012.

8: Nature of the research
• Biological research is transformational
– Papillae are a key part of cephalopod camouflage. The mechanisms
underlying expression of papillae are altogether unknown. At the
conclusion of this research, we aim to discover the mechanism by which
papillae are expressed.
• Numerical research is transformational
– The numerical technique of random imperfections enables non-experts to
simulate complex buckling and post-buckling behavior using off-the-shelf
software. The method has broad applicability for simulation of elastic
instabilities. The ability to simulate elastic instabilities coupled to other
physical phenomena (thermal, electrical, viscous, transport) is a
tremendous advantage.
• Synthetic papillae research is evolutionary
– Research on surface-buckling is well-developed. Our research aims for
practical application of this research to realize synthetic papillae using SMA-
elastomer composites. This permits a wide range of surface textures to be
realized with rapid actuation, reversibility, and spatial addressability.

Acknowledgements
• Funding: AFOSR, Hugh DeLong
• Derek Breid, Sourav Chatterjee, Jiani Niu, Victoria Lai, Andrew
Flowers, Rachmadian Wulandana
• Lots of exchanges with Justine Allen, Paloma Gonzalez, Roger
Hanlon, William Kier