Embed Size (px)
Citation preview

IEEE SoutheastCon Hardware ChallengeCameron McSweeney, Kendall Knapp Brian Roskuszka, Daniel Hofstetter
Advisors: Dr. Jing Wang, Dr. Yufeng Lu, Dr. In Soo Ahn

Overview
● Introduction● Review of Literature and Prior Work● Subsystem Level Functional Requirements and Specifications● Engineering Efforts Completed to Date● Parts List● Deliverables for ECE 499; Division of Labor; Schedule for Completion● Discussion and Future Directions● References

Introduction

Introduction
● Build a fully autonomous competition robot○ Must fit inside a 12”x12”x12” cube at start of competition○ No weight requirement○ Must complete 4 tasks within 4 minutes
● Tasks to be completed:○ Electronic component detection○ Magnetic field sensing○ Accurate knob turning○ Dart firing toward target
● Competition winner based upon points system

Review of Literature and Prior Work

Literature Review
● Hardware competition is an annual event in SoutheastCon.● Students are required to build a small autonomous robot for completing
various tasks such as navigation, detection, etc. ● SoutheastCon 2017 Hardware Competition Rules
○ Robot Requirements○ Arena Specifications
■ Arena dimensions and construction■ Task details ■ Scoring system
○ Competition Procedures

Competition Rules - Robot Requirements
● Starting dimensions must be less than 12 in3
○ Can later exceed this limit○ Can have multiple robotic units
■ Must be tethered together■ Cannot wirelessly communicate between units
○ Cannot exceed arena walls by more than 3 inches
● Must have clearly labeled start button● Must have easily accessible “off” switch● Must not cause harm to spectators or arena● May only be accessed by teams to move to arena during match
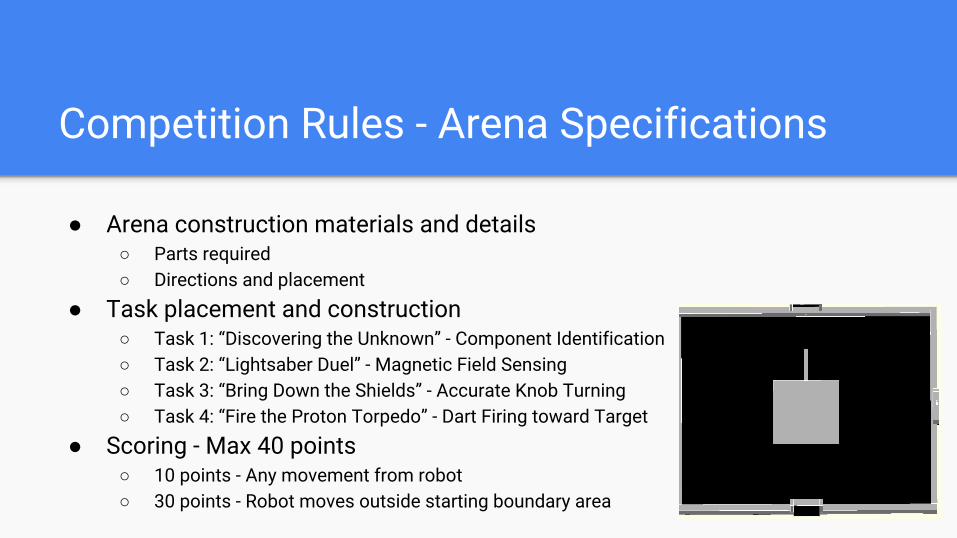
Competition Rules - Arena Specifications
● Arena construction materials and details○ Parts required○ Directions and placement
● Task placement and construction○ Task 1: “Discovering the Unknown” - Component Identification○ Task 2: “Lightsaber Duel” - Magnetic Field Sensing○ Task 3: “Bring Down the Shields” - Accurate Knob Turning○ Task 4: “Fire the Proton Torpedo” - Dart Firing toward Target
● Scoring - Max 40 points○ 10 points - Any movement from robot ○ 30 points - Robot moves outside starting boundary area

Competition Rules - Task 1 Specifics● Task 1: “Discovering the Unknown”
○ Six copper pads; 5 arranged in pentagon around 6th center pad○ Middle pad is common○ Five external pads randomly connected to Wire, Resistor, Capacitor, Inductor, Diode○ Locations of each component must be stored for Task 3○ Correct decoding can be shown via LCD
● Scoring - Max 135 points○ 10 points - Touch any part of Task 1○ 15 points - Correctly decode 1 component location○ 35 points - Correctly decode 2 component locations○ 60 points - Correctly decode 3 component locations○ 90 points - Correctly decode 4 component locations○ 125 points - Correctly decode 5 component locations

Competition Rules - Task 2 Specifics● Task 2: “Lightsaber Duel”
○ Must hit the arena “Lightsaber” while magnetic field is on■ Electromagnet - 1A current, 40 turns 20 AWG wire■ Field is on 5 times in 2 second intervals over 30 seconds■ Penalty for hitting lightsaber when field is off
● Scoring - Max 290 points, no negative scores○ 10 points - Touch any part of Task 2○ 30 points - Register first hit on lightsaber○ 60 points - 1 additional, legal hit detected○ 110 points - 2 additional, legal hits detected○ 170 points - 3 additional, legal hits detected○ 250 points - 4 additional, legal hits detected○ -50 points - Penalty for any illegal hit

Competition Rules - Task 3 Specifics
● Task 3: “Bring Down the Shields”○ Turn knob multiples of 360°○ Alternate directions (e.g. Clockwise, then Counterclockwise)○ Number of rotations determined by Component ID task○ Allowed 15° error each direction
● Scoring - Max 325 points○ 10 points - Touch any part of Task 3○ 45 points - Correctly dial 1 digit○ 95 points - Correctly dial 2 digits○ 155 points - Correctly dial 3 digits○ 230 points - Correctly dial 4 digits○ 325 points - Correctly dial all 5 digits
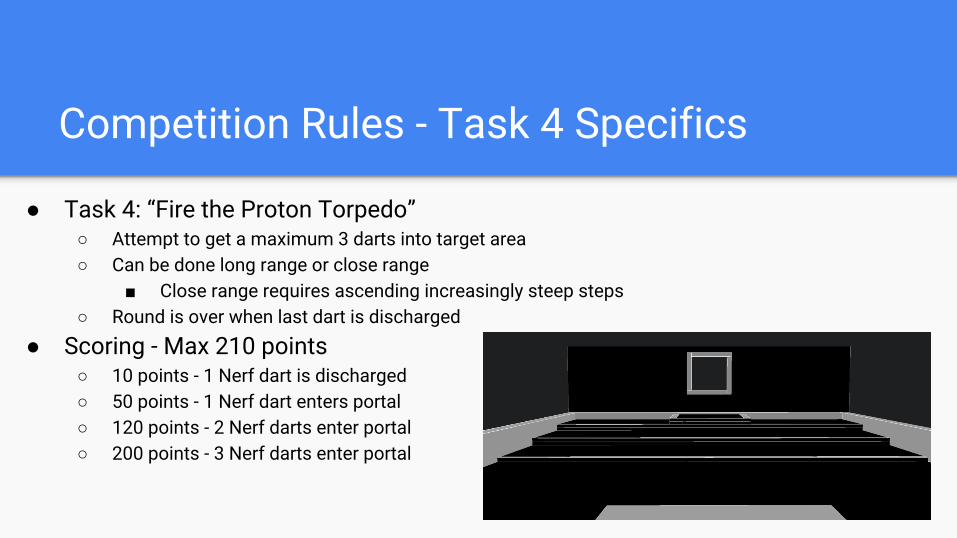
Competition Rules - Task 4 Specifics
● Task 4: “Fire the Proton Torpedo”○ Attempt to get a maximum 3 darts into target area○ Can be done long range or close range
■ Close range requires ascending increasingly steep steps○ Round is over when last dart is discharged
● Scoring - Max 210 points○ 10 points - 1 Nerf dart is discharged○ 50 points - 1 Nerf dart enters portal○ 120 points - 2 Nerf darts enter portal○ 200 points - 3 Nerf darts enter portal

Competition Rules - Competition Procedures
● At least 2 preliminary matches ○ Robots are sequestered during each round, except when called to compete
■ Cannot be charging■ 2 minutes allowed to transport robot to arena■ Returned to sequestration area until round is complete■ 30 minutes guaranteed between rounds to modify robot in any way
● Final Round○ Top 4 teams from preliminaries compete○ Preliminary scores do not matter

Subsystem Level Functional Requirements

Subsystems
● Master Subsystem● Vision ● Navigation● Component ID● Lightsaber Duel● Knob Turning● Dart Firing
System Level Block Diagram
Master Subsystem
● Coordinates all other subsystems
● Relays information between subsystems

Vision Subsystem
● Calculations done inside subsystem
● Position data sent to master subsystem

Navigation Subsystem

Component Identification - Task 1 Subsystem
Lightsaber Duel - Task 2 Subsystem
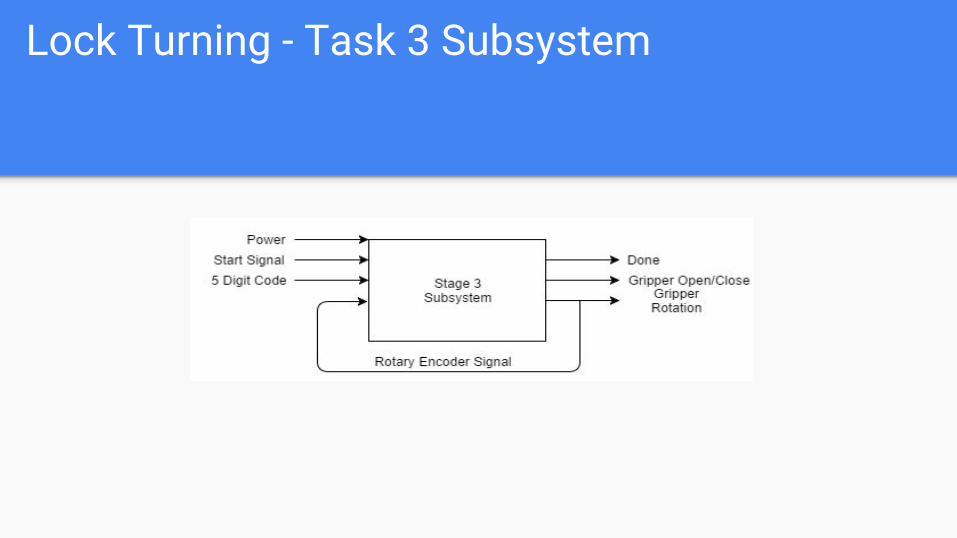
Lock Turning - Task 3 Subsystem

Dart Firing - Task 4 Subsystem
● Calibrated before competition
● No aiming necessary
● Competition ends after darts are fired

Engineering Efforts Completed to Date

Chassis Construction
● Two 2 ⅝” Drive wheels○ 12V DC Motors
● 10” square chassis● Rotating top platform● 1” Steel ball caster wheels● Platform base height: 4 ¾”● Clearance height: 3”● Platform rotation motor still
under consideration

Task 1 - Component Identification
● Components identified by transient response○ Increasing/decreasing○ Voltage level
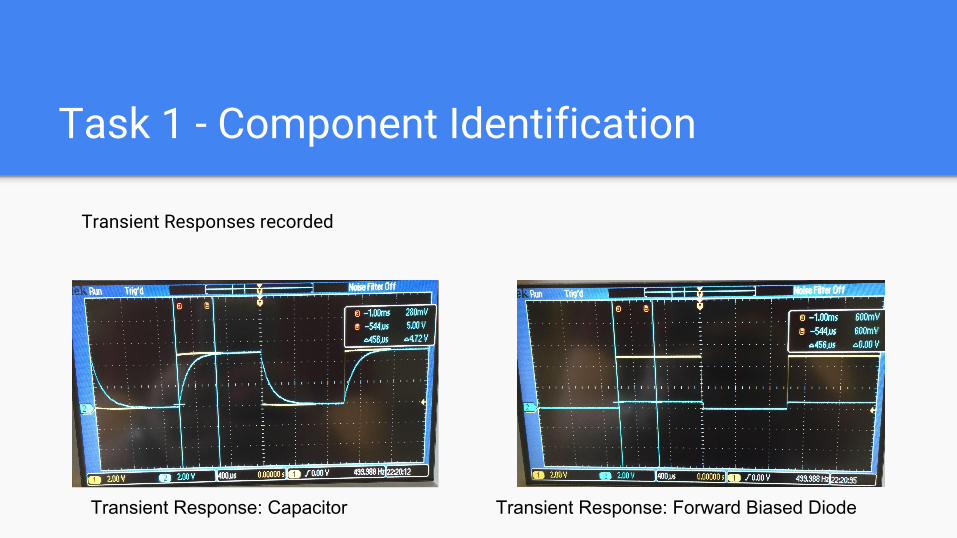
Task 1 - Component Identification
Transient Responses recorded
Transient Response: Capacitor Transient Response: Forward Biased Diode
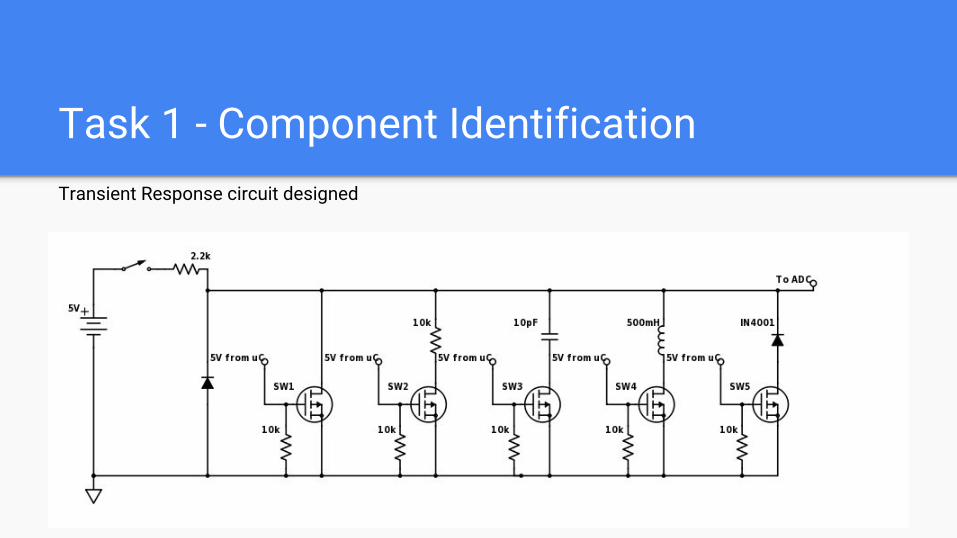
Task 1 - Component IdentificationTransient Response circuit designed

Task 1 - Component Identification
● Physical circuit built with FET switches

Task 1 - Component Identification
Identification code written - works correctly and consistently
Image of connected ATMega128

Task 2 - Lightsaber Duel
● Magnetic Field Detection○ InvenSense MPU-9250 Sensor
● Robot’s Lightsaber○ Hitec HS-322HD Servo Motor
○ Plastic or Rubber Arm
● Detecting Lightsaber Contact○ Allegro ACS712 Hall-Effect Current
Sensor
○ MEMSIC 2125 Dual-axis accelerometer

Task 3 - Lock Rotation
● Gripper Arm○ Purchased a gripper arm
and servo motor to grab onto the knob.
● Arm Rotation○ DC Motor with rotary
encoder to rotate the arm

Task 4 - Dart Firing
● Nerf guns too bulky and difficult to fire
● Prototype developed by Nick Schmidt
○ Loaded before competition
○ Metal tube - pull pin to release spring
○ Travels over 10 ft
● Mechanism needed to pull pin
○ May use spool of string attached to drive
motor

Testing Arena

Vision Subsystem
Original Image Sobel Edge Detection Blurred Canny Edge Detection

Vision Subsystem
● Binary image with threshold = 150
● Create distance estimate from several data points
● ~.5 in accuracy
● Does not work with angles

Navigation Subsystem - Distance Sensors
● Infrared - not accurate
● Ultrasonic - accurate to less than .1in
● Touch - could be used to sense contact with arena wall

Navigation Subsystem - Locomotion
● Two-wheel configuration
● 12V DC Motors with Rotary Encoders
● Caster wheels to support the rear of the chassis

Navigation Subsystem - Locomotion

Parts List

Parts List - Arena
● 2 Quarts Paint $20● Wood $40● Vibration Sensor $3● Rotary Encoder $5
Total $68

Parts List - General Robot
● 2 Drive motors On hand● 8 Diodes - voltage protection On hand● 2 Caster wheels $6.50● 1 4’x8’ particle board - platforms $20● 1 Rotating Lazy Susan device $4.50● 1 Motor On hand● 2 Sonar distance sensors On hand● 1 Lead Acid battery $15
Total $46

Parts List - Task 1
● 1 Linear Movement Stepper Motor $20● 6 Springs On hand● 5 Logic-level FETs $5● 1 Diode On hand● 1 LCD screen On hand● 2 Buttons $1● 1 2.2kΩ resistor On hand● 1 Proto-board $3● 1 Dual H-Bridge On hand
Total $28

Parts List - Task 2
● 1 Standard Servo Motor On hand● 1 Hall-Effect Current Sensor $5● 1 Magnetic Field Sensor $16● 1 Plastic or Rubber Robotic Arm $2
Total $23
Parts List - Task 3
● 1 Gripper Kit $16● 1 Servo Motor $10
Total $26
Parts List - Task 4
● 3 Nerf Jolt Guns $20
Parts List - Possible Future Expenses
Current Amount Spent: $211
● 2 Sonar distance sensors $60● 1 Vision System $100● 1 Robot Chassis $70● 3 Dart Launchers $30
Total: $471
Deliverables for ECE 499; Division of Labor; Schedule for Completion

ECE 499 Deliverables
● Final Project Report
● Final Project Presentation
● Final Project Demo
● Industry Advisory Board Poster Presentation
● Bradley Student Scholarship Expo

Division of Labor
Team Member Functionality Stage
Cameron Robotic Controls 1: Component ID
Daniel Navigation 2: Lightsaber Swing
Brian Circuit Design
Robot Chassis Layout/Design
3: Turning Knob
Kendall Vision System
Help with Navigation Sensors
4: Launching Dart

Schedule for Completion
Task Deadline
Have moving robot Dec. 6
Individual tasks functioning Jan. 27 (requires work during break)
Integrate subsystems Feb. 24
Fine-tune system Mar. 24
Competition Mar. 30

Discussion and Future Directions
Discussion
● More work needs to be done for each task before integrating them
● Specific problems to deal with will be identified once robot is built and
tested○ May use distance sensors without camera system
○ Concern for robotic arm positioning
○ Dart accuracy
● Prioritize points-heavy tasks○ Need to maximize points at competition
References

References
[1] SoutheastCon 2017 Hardware Competition Rules [Online]. Available: http://sites.ieee.org/southeastcon2017/student-program/student-hardware-competition/

IEEE SoutheastCon Hardware ChallengeCameron McSweeney, Kendall Knapp Brian Roskuszka, Daniel Hofstetter
Advisors: Dr. Jing Wang, Dr. Yufeng Lu, Dr. In Soo Ahn