Embed Size (px)
Citation preview
Fakulteta za elektrotehniko, računalništvo in informatiko
Smetanova ulica 17 2000 Maribor, Slovenija
Sebastjan Kolenc
BREZŽIČNO SENZORSKO OMREŽJE MiWi
Diplomsko delo
Maribor, marec 2014
BREZŽIČNO SENZORSKO OMREŽJE MiWi
Diplomsko delo
Študent: Sebastjan Kolenc
Študijski program: VS Elektrotehnika
Smer: Telekomunikacije
Mentor: Izr. prof. dr. Dušan Gleich

iii

Brezžično senzorsko omrežje MiWi
iv
ZAHVALA
Zahvaljujem se mentorju prof. dr. Dušanu Gleichu za pomoč in potrpežljivo vodenje pri pisanju diplomskega dela. Prav tako se zahvaljujem vsem domačim, ki so me dolga leta spodbujali h končnemu cilju.

Brezžično senzorsko omrežje MiWi
v
BREZŽIČNO SENZORSKO OMREŽJE MiWi
Ključne besede: Brezžično senzorsko omrežje, WPAN, ZigBee, MiWi, standard IEEE 802.15.4, ZigBee Alliance, industrijsko okolje.
Povzetek
V diplomskem delu smo na kratko opisali brezžični protokol MiWi, kateri izhaja iz
protokola ZigBee (IEEE 802.15.4). ZigBee je bil v osnovi zamišljen kot WPAN odprt
standard za radijsko omrežje, ki bi bil alternativa za ostala brezžična omrežja Bluetooth in
Wireless. Protokol je primeren za uporabo v brezžičnih senzorskih omrežjih, primernih za
industrijsko okolje. Gre preprosto zato, da imamo neko množico elementov (gradniki
ZigBee omrežja oz. senzorska vozlišča) omrežja, povezanih med seboj tako, da tvorijo
omrežje za prenos podatkov na kratkih razdaljah 10-100m. Vendar so ti podatki količinsko
zelo majhni. Prednost takega omrežja je v tem, da se podatki pošiljajo v majhnih paketih
(količinsko omejeni), hkrati pa so gradniki omrežja aktivni samo takrat, ko pride do
prenosa podatkov (paketov). Takrat kadar ni prenosa podatkov se gradnik (njegov radijski
del) izklopi in s tem privarčuje pri energiji. To pomeni, da so takšni gradniki omrežja
primerni za aplikacije v težko dostopnih območjih (industrijska okolja), ker ne potrebujejo
vzdrževanja in bi bila zamenjava vira energije (baterija) za njihovo delovanje možna z
velikimi napori in stroški.
Ker je po določenem obdobju uporabe ZigBee protokola, združenje ZigBee Aliance ta
protokol postopoma nadgrajevalo, je postal zelo kompleksen. Zato se je porodila ideja,
kako napraviti omrežje, ki temelji na ZigBee protokolu in je bolj prijazno do uporabnika.
Tako je nastal protokol MiWi, ki je opisan v diplomski nalogi. V diplomski nalogi, je v
praktičnem delu predstavljeno, kako postaviti enostavno “peer-to-peer“ brezžično
senzorsko povezavo v brezžičnem senzorskem omrežju z uporabo protokola MiWi ter
praktični primer pošiljanja podatkovnega paketa določene dolžine in vsebine preko
omrežja.

Brezžično senzorsko omrežje MiWi
vi
MiWi WIRELESS SENSOR NETWORK
Key words: Wireless sensor network, WPAN, ZigBee, MiWi, standard IEEE 802.15.4, ZigBee Aliance, industrial environment.
Abstract
In these thesis we briefly described the MiWi wireless protocol which derives from the
protocol ZigBee (IEEE 802.15.4). ZigBee was basically conceived as a WPAN (wireless
personal area network) is an open standard for radio network that would be an alternative
to other wireless networks Bluetooth and Wireless. The protocol is suitable for use in
wireless sensor networks suitable for industrial environments. It is simply that we have a
set of elements (building blocks of ZigBee network or Sensor node) networks connected
to each other to form a network to transmit data over short distances 10-100m. However
these data are quantitatively very small. The advantage of this system is that the data is
sent in small packages (limited quantity) as well as network components active only when
there is a transfer of data (packets). At that time when there is no data transfer the widget
(its radio module) switched off and thereby saving energy. This means that such network
components are suitable for applications in hard to reach areas (industrial environment)
because it does not require maintenance and the replacement of the energy source
(battery) for their operation possible with considerable effort and cost.
Because after a certain period of ZigBee protocol Association Aliance ZigBee protocol that
progressively build on it has become very complex. Therefore the idea of how to make
network based on the ZigBee protocol more user-friendly. This has resulted in MiWi
protocol which is described in my graduate thesis. In this graduate thesis, the practical
work illustrates how to set up simple “peer-to-peer” wireless sensor link in a wireless
sensor network using MiWi protocol and a practical example of sending a data packet
certain length and content over the network.
Brezžično senzorsko omrežje MiWi
vii
KAZALO VSEBINE
1 UVOD .............................................................................................................. 1
1.1 Namen in cilj diplomskega dela ............................................................................. 1
1.2 Omejitev raziskave .................................................................................................. 2
2 PREDSTAVITEV DELOVNE SKUPINE IEEE 802.15 ..................................... 3
3 WPAN STANDARD IEEE 802.15.4 ................................................................. 5
4 IEEE 802.15.4 ZIGBEE ................................................................................... 7
4.1 Zgodovina razvoja ZigBee ..................................................................................... 7
4.2 Opis ZigBee protokola ............................................................................................ 8
4.3 Tipi naprav, definirani v ZigBee protokolu ......................................................... 10
4.4 Arhitektura protokola ZigBee .............................................................................. 11
4.5 Omrežna plast (NWK) ........................................................................................... 12
4.6 Aplikacijsko podporna plast (APS) ..................................................................... 14
4.7 Aplikacijsko ogrodje (AF) ..................................................................................... 15
4.8 Objekt ZigBee naprave (ZDO) .............................................................................. 16
4.9 Profil ZigBee naprave ........................................................................................... 18
4.10 Topologija omrežja ZigBee .................................................................................. 19
5 IEEE 802.15.4 MIWI ...................................................................................... 23
5.1 Uvod v nastanek MiWi protokola ......................................................................... 23
5.2 Razvoj MiWi protokola .......................................................................................... 23
Brezžično senzorsko omrežje MiWi
viii
5.3 Razlaga MiWi protokola ....................................................................................... 24
5.4 Pregled MiWi protokola ........................................................................................ 24
5.5 Tipi naprav v MiWi omrežju ................................................................................. 25
5.6 Topologija naprav v MiWi protokolu ................................................................... 26
5.6.1 Zvezdna omrežna topologija (ang. star network configuration) ........................... 26
5.6.2 Grozdna omrežna topologija (ang. cluster tree configuration) ............................. 27
5.6.3 Mešana omrežna topologija (ang. mesh network configuration) ......................... 28
5.7 Večdostopovno omrežje (ang. multi-acess network) ........................................ 29
5.8 Naloge naslavljanja v MiWi protokolu ................................................................ 29
5.9 Pošiljanje sporočil v MiWi protokolu .................................................................. 31
5.10 Usmerjanje prometa ............................................................................................. 32
5.10.1 Učenje o sosednjih koordinatorjih ....................................................................... 33
5.10.2 Broadcast sporočila (ang. broadcast messages) ................................................ 34
5.10.3 Poročila v MiWi protokolu .................................................................................... 35
5.11 Sporočila in servisi v skladu ............................................................................... 39
5.11.1 Iskanje vozlišč v omrežju s pomočjo EUI ............................................................ 40
5.11.2 Odpiranje vtičnice k napravi (ang. opening socket to a device) .......................... 42
5.11.3 Vtičnik skupine grozda (ang. cluster socket) ....................................................... 42
5.12 Upoštevanje uporabnika ...................................................................................... 44
5.12.1 Kateremu omrežju se pridružiti? .......................................................................... 44
5.12.2 Okrevanje iz napak .............................................................................................. 44
5.12.3 Zamenjava EUI, ki ščiti pred selitvijo vozlišč ....................................................... 45
5.12.4 Sprejem odgovora na odprt vtičnik ...................................................................... 46
5.12.5 Omrežni otoki ...................................................................................................... 46
5.12.6 Varnost ................................................................................................................ 48
6 IMPLEMENTACIJA MIWI PROTOKOLA S POMOČJO PROGRAMSKEGA
RAZVOJNEGA OKOLJA KEIL UVISION4 .......................................................... 49
6.1 Strojne komponente ............................................................................................. 49
Brezžično senzorsko omrežje MiWi
ix
6.2 SPaRC Mosquito v.2 osnovni modul .................................................................. 49
6.3 Radijski modul Microchip MRF24J40MA ............................................................ 51
6.4 ZENATM brezžični omrežni analizator .................................................................. 52
6.5 Pregled oken z osnovnimi nastavitvami ZENA brezžičnega analizatorja
omrežja ............................................................................................................................. 54
7 SKLEP ........................................................................................................... 61
8 LITERATURA ................................................................................................ 63
9 PRILOGE ....................................................................................................... 65
Brezžično senzorsko omrežje MiWi
x
KAZALO SLIK
SLIKA 1: SEDEM PLASTNA OSI ARHITEKTURA OMREŽJA ................................................ 5
SLIKA 2: PLASTI, KI JIH POKRIVA STANDARD IEEE 802.15.4 ......................................... 6
SLIKA 3: RAZDELITEV ZIGBEE KANALOV PO FREKVENČNIH PODROČJIH ......................... 12
SLIKA 4: POLOŽAJ NWK, MAC IN PHY PLASTI V OSI STRUKTURI ............................... 13
SLIKA 5: POLOŽAJ APLIKACIJSKO PODPORNE PODPLASTI (APS) V OSI STRUKTURI ........ 14
SLIKA 6: POLOŽAJ APLIKACIJSKEGA OGRODJA V OSI STRUKTURI ................................. 16
SLIKA 7: POLOŽAJ OBJEKTA ZIGBEE NAPRAVE (ZDO) V OSI STRUKTURI ...................... 17
SLIKA 8: PROFIL ZIGBEE NAPRAVE ........................................................................... 18
SLIKA 9: ZVEZDNA TOPOLOGIJA ................................................................................ 20
SLIKA 10: DREVESNA TOPOLOGIJA ........................................................................... 20
SLIKA 11: MEŠANA TOPOLOGIJA ............................................................................... 21
SLIKA 12: MODEL ZIGBEE OMREŽJA ......................................................................... 21
SLIKA 13: ZVEZDNA OMREŽNA TOPOLOGIJA ............................................................... 27
SLIKA 14: GROZDNA OMREŽNA TOPOLOGIJA .............................................................. 27
SLIKA 15: MEŠANA OMREŽNA TOPOLOGIJA ................................................................ 28
SLIKA 16: STRUKTURA KRATKEGA NASLOVA V MIWI PROTOKOLU ................................ 30
SLIKA 17: DODELJEVANJE KRATKIH NASLOVOV V MIWI OMREŽJU ................................ 30
SLIKA 18: STRUKTURA GLAVE PAKETA V MIWI PROTOKOLU......................................... 31
SLIKA 19: ODLOČITVENI ALGORITEM ZA PAKETNO USMERJANJE V MIWI PROTOKOLU ..... 34
SLIKA 20: VRSTNI RED ISKANJA EUI NASLOVOV ......................................................... 41
SLIKA 21: ZAPOREDJE ZA VTIČNIK PRI ODPRTI ZAHTEVI IN ODZIVU ................................ 43
SLIKA 22: NASTANEK OMREŽNIH OTOKOV V MIWI PROTOKOLU .................................... 47
SLIKA 23: OSNOVNI MODUL SPARCMOSQUITO V.2 ................................................... 50
Brezžično senzorsko omrežje MiWi
xi
SLIKA 24: ARHITEKTURA OSNOVNEGA MODULA SPARCMOSQUITO V.2 ........................ 50
SLIKA 25: RADIJSKI MODUL MICROCHIP MRF24J40MA ............................................. 51
SLIKA 26: ARHITEKTURA MODULA MICROCHIP MRF24J40MA .................................... 51
SLIKA 27: KOMUNIKACIJSKI SIGNALI MED PIC MIKROKRMILNIKOM NA MODULU
SPARCMOSQUITO V.2 IN MODULOM MICROCHIP MRF24J40MA ......................... 52
SLIKA 28: MICROCHIP ZENATM
BREZŽIČNI OMREŽNI ANALIZATOR ................................. 52
SLIKA 29: GLAVNO OKNO OB ZAGONU ZENA BREZŽIČNEGA ANALIZATORJA OMREŽJA .... 53
SLIKA 30: KONFIGURACIJSKO OKNO V PLASTI ZA MIWI NAPRAVO ................................. 54
SLIKA 31: KONFIGURACIJSKO OKNO V PLASTI ZA ODDAJNIK ......................................... 56
SLIKA 32: KONFIGURACIJSKO OKNO V PLASTI ZA NASTAVITVE VARNOSTI ...................... 57
SLIKA 33: KONFIGURACIJSKO OKNO V PLASTI ZA NASTAVITVE NWK/MAC PLASTI ......... 58
SLIKA 34: KONFIGURACIJSKO OKNO V PLASTI ZA NASTAVITVE PIC ............................... 60
Brezžično senzorsko omrežje MiWi
xii
KAZALO TABEL
TABELA 1: FREKVENČNI PASOVI IN PODATKOVNE HITROSTI .......................................... 10
TABELA 2: NAPRAVE, DEFINIRANE V IEEE 802.15.4 PROTOKOLU ................................ 25
TABELA 3: NAPRAVE, DEFINIRANE V MIWI PROTOKOLU ............................................... 26
TABELA 4: SPECIFIKACIJA POLJA ZA NADZOR OKVIRJEV (ANG. FRAME CONTROL) ........... 32
TABELA 5: POROČILA V MIWI PROTOKOLU ................................................................. 35
TABELA 6: POROČILO OPEN_CLUSTER_SOCKET_REQUEST ............................. 36
TABELA 7: POROČILO OPEN_CLUSTER_SOCKET_RESPONSE .......................... 36
TABELA 8: POROČILO OPEN_P2P_SOCKET_REQUEST ....................................... 36
TABELA 9: POROČILO OPEN_P2P_SOCKET_RESPONSE .................................... 37
TABELA 10: POROČILO EUI_ADDRESS_SEARCH_REQUEST .............................. 37
TABELA 11: POROČILO EUI_ADDRESS_SEARCH_RESPONSE ........................... 38
TABELA 12: POROČILO ACK_REPORT_TYPE ........................................................ 38
TABELA 13: POROČILO CHANNEL_HOPPING_REQUEST ..................................... 38
TABELA 14: POROČILO RESYNCHRONIZATION_REQUEST ................................. 39
TABELA 15: POROČILO RESYNCHRONIZATION_RESPONSE .............................. 39
Brezžično senzorsko omrežje MiWi
xiii
UPORABLJENE KRATICE
6LoWPAN (IPv6 Low power Wireless Personal Area Networks) – brezžično osebno
omrežje z majhno oddajno močjo, ki uporablja IPv6 protokol
ACK (Acknowledge) – potrditev
AF (Application Framework) – aplikacijsko ogrodje
AIB (APS Information Base) – APS informacijska baza
AODV (Ad-hoc On-demand Distance Vector) – vektor dolžine na zahtevo
APS (Application Support sub-layer) – podplast za podporo aplikaciji
APSDE (Application Support Data Entity) – aplikacijsko podprt podatkovni dostop
APSME (APS Management Entity) – APS upravljanje dostopa
BAN (Body Area Network) – delovna skupina telo omrežja
BI (Beacon Interval) – interval beacon okvirja
BSO (Body Sensor Network) – telesno senzorsko omrežje
CRC (Cyclic Redundancy Check) – ciklično preverjanje pravilnosti (prenosa podatkov)
CSMA/CA (Carrier Sense Multiple Access With Collision Avoidance) – dostop do kanala z
izogibanjem trkov
DSSS (Direct-Sequence Spread Spectrum) – direktna sekvenca razpršenega spektra
DTACK (Data Transfer Acknowledge) – prenos podatkov s potrditvijo
EUI (Extended Organizationally Unique Identifier) – organiziran razširjeni edinstveni
identifikator
FFD (Full Function Device) – vrsta naprave, ki deluje z vsemi podprtimi funkcijami
HART – tehnologija za robustno brezžično omrežje za namen meritev in nadzora
IEC (International Electrotechnical Commission) – mednarodna elektrotehniška zveza
IEEE (Institute of Electrical and Electronics Engineers) – Inštitut inženirjev elektrotehnike
in elektronike
IETF (Internet Engineering Task Force) – Združenje internetnih inženirjev
ISA (International Society of Automation-wireless systems for industrial automation) –
Mednarodno združenje za brezžične sisteme v industrijski avtomatizaciji
ISM (Industrial, Scientific and Medical radio bands) – industrijski, znanstveni in medicinski
radijski pasovi
ISO (International Organization for Standardization) – Mednarodna organizacija za
standardizacijo
LED (Light-Emitting Diode) – svetleča dioda
Brezžično senzorsko omrežje MiWi
xiv
LR-WPAN (Low Rate-Personal Area Network) – nizko hitrostno brezžično zasebno
omrežje
LSB (Least Significant Bit) – najmanj pomemben bit
MAC (Media Access Control) – krmiljenje dostopa do prenosnega medija
MSB (Most Significant Bit) – najbolj pomemben bit
NVM (Non Volatile Memory) – spominski element, ki izgubi podatke, ko mu vzamemo
napajanje
NWK (Network Layer) – omrežna plast
OEM (Original Equipment Manufacturer) – originalna oprema proizvajalca
OSI (Open Systems Interconnection) – povezani odprti sistem
P2P (Peer-to-Peer) – omrežje vozlišč, kjer se vozlišča imenujejo peer in so vsa med seboj
enakovredna
PAN (Personal Area Network) – računalniško omrežno organizirano osebno omrežje
PANID (Personal Area Network Identifire) – identifikator računalniško omrežno
organiziranega osebnega omrežja
PCB (Printed Circuit Board) – tiskano vezje
PHY (Physical Layer) – fizična plast
PIC (Peripheral Interface Controller) – nadzorni vmesnik periferije
PSK (Phase-Shift Keying) – modulacija s fazim pomikom
QoS (Quality of Service) – kvaliteta storitev
QPSK (Quadrature Phase-Shift Keying) – kvadro modulacija s fazim pomikom
RAM (Random-Access Memory) – bralno-pisalni pomnilnik
RFD (Reduce Function Device) – naprava, ki deluje z omejenim številom funkcij
RSSI (Received Signal Strength Indicator) – indikator moči sprejetega signala
SAP (Service Access Point) – servisna dostopovna točka
SPI (Serial Peripheral Interface) – serijski periferni vmesnik
SSID (Service Set Identifire) – ime brezžičnega lokalnega omrežja
TCP/IP (Transmission Control Protocol/Internet Protocol) – protokol za nadzor
prenosa/internetni sklad protokolov
TG (Task Group) – opravilna skupina
TIM (Traffic Indication Map) – zemljevid prometa
USB (Universal Serial Bus) – univerzalno serijsko vodilo
VLC (Visible Light Communication) – komunikacija s pomočjo vidne svetlobe
W3C (World Wide Web Consortium) – svetovno Web združenje
Brezžično senzorsko omrežje MiWi
xv
WirelessHART – brezžična tehnologija za robustno brezžično omrežje za namen meritev
in nadzora
WLAN (Wireless Local Area Network) – brezžično lokalno omrežje
WPAN (Wireless Personal Area Network) – brezžično osebno omrežje
ZC (ZigBee Coordinator) – ZigBee koordinator
ZDO (ZigBee Device Object) – ZigBee naprava
ZED (ZigBee End Device) – ZigBee končna naprava
ZR (ZigBee Router) – ZigBee usmerjevalnik
Brezžično senzorsko omrežje MiWi
1
1 UVOD
V preteklosti smo opažali hitri razvoj žičnih omrežij. To pomeni povezavo posameznih
enot na neko centralno enoto preko ožičenja. Slaba stran takih omrežij je dolžina med
centralno enoto in enotami, ki komunicirajo z njo ter strošek polaganja kablov in vse večja
ožičenost objektov. Problem se je pojavil predvsem pri nekaterih tehnologijah (standardih
za prenos podatkov RS 232, RS485), kjer smo omejeni s številom enot, ki komunicirajo
med seboj v omrežju ter njihovo razdaljo glede na uporabljeno tehnologijo.
Zato so arhitekti omrežij prišli na idejo o brezžičnih omrežjih, kjer se izognemo zgoraj
omenjenemu problemu ožičenja. Hkrati pa je v zadnjih letih opaziti hiter razvoj naprav, ki
imajo vgrajeno množico senzorjev za opazovanje njihovega delovanja v nekem
industrijskem procesu. Ti senzorji so med seboj povezani na neko centralno enoto, ki na
podlagi pridobljenih parametrov iz senzorjev ustrezno ukrepa v industrijskem procesu, v
katerem so vgrajeni. Z brezžičnimi omrežji se izognemo nepotrebnim stroškom ožičevanja
senzorjev, ki so velikokrat zelo zahteven in drag proces. Zato bo v prihodnosti vse več
brezžičnih povezav, ki bodo izpodrinile obstoječe žične povezave.
Pri nadzoru industrijskih procesov je obdelava podatkov v realnem času ključnega
pomena. Pri teh prenosih ne potrebujemo neke velike hitrosti prenosa, ampak je bolj
pomembno, da nimamo velikih zakasnitev med prenosom. Hkrati je poudarek tudi na
prenosu podatkov preko brezžičnega omrežja za veliko število senzorjev. Seveda pa je
odločilnega pomena tudi to, da imamo zelo majhno porabo energije med samim
prenosom in v določenem časovnem obdobju obratovanja končne naprave.
V preteklosti so bile brezžične komunikacije uporabljene tudi v komercialne namene, za
povezovanje PC-jev, dlančnikov, mobilnih naprav Bluetooth in so dosegle velik uspeh,
vendar se niso uveljavile v industrijskih aplikacijah, ker imajo določene omejitve in
slabosti, ki so opisane v naslednjih poglavjih.
1.1 Namen in cilj diplomskega dela
Namen in cilj diplomskega dela je pregled in razdelitev standardov za brezžična osebna
omrežja WPAN [1], predstavitev delovne skupine IEEE 802.15 [1] in njene štiri standarde
(IEEE 802.15.1 do IEEE 802.15.7) ter novo nastalo skupino 6LoWPAN [2], ki je nastala
zaradi potreb po internetnem protokolu v napravah z nizko porabo energije. Te naprave
Brezžično senzorsko omrežje MiWi
2
imajo omejeno procesno moč in so še vedno sposobne sodelovati v internetni strukturi.
Podrobneje smo opisali protokol ZigBee [3], iz katerega je bil izpeljan protokol MiWi [4]. V
bistvu je protokol MiWi okrnjena verzija protokola ZigBee. Hkrati pa smo s tem želeli
prikazati, v katero skupino spada že prej omenjeni brezžični protokol MiWi. Tu je potrebno
poudariti, da so vsi štirje standardi v osnovi namenjeni za brezžična osebna omrežja
WPAN. Raziskovalne aktivnosti na področju brezžičnih senzorskih omrežij so danes zelo
aktualna tema. O tem je bilo že veliko napisanega tako v tujih kot tudi v domačih
strokovnih in znanstvenih prispevkih ter literaturi. Smernicam in trendom s tega področja,
ki so predstavljeni v različnih razpravah, pa danes sledi tudi industrijski razvoj. Osnovni cilj
diplomskega dela je predstaviti arhitekturo in delovanje brezžičnega protokola MiWi za
komunikacijske potrebe v industrijskih aplikacijah.
Cilj diplomskega dela je prikazati uporabo MiWi protokola na preprostem primeru
brezžičnega senzorskega omrežja tipa P2P, s praktičnim primerom pošiljanja
podatkovnega paketa določene dolžine in vsebine preko omrežja.
1.2 Omejitev raziskave
Zaradi kompleksnosti in razsežnosti raziskav na tem področju smo se v diplomskem delu
omejili na preprost primer brezžičnega senzorskega omrežja tipa P2P, katerega
komunikacija temelji na osnovi enostavnega MiWi protokola. Gre za preprosto
problematiko, da s številom povezav v brezžičnem senzorskem omrežju bliskovito
narašča tudi zahtevnost reševanja teh povezav v omrežju. Osredotočili smo se na samo
eno povezavo in to podrobno analizirali ter predstavili mehanizme vzpostavljanja
komunikacije, povezovanja in prenosa podatkov. Zagotovili smo tudi, da je brezžično
senzorsko omrežje imelo zelo majhno porabo električne energije, dovolj visoko varnost pri
prenosu podatkov in zelo majhne zakasnitve pri prenosu podatkov.
Brezžično senzorsko omrežje MiWi
3
2 PREDSTAVITEV DELOVNE SKUPINE IEEE 802.15
IEEE 802.15 [1] je mednarodno združenje v okviru združenja IEEE strokovnjakov, ki je
definiralo WPAN standarde. To mednarodno združenje vsebuje več skupin (sedem
skupin), ki raziskujejo vsaka svoje področje. Te skupine, ki vse spadajo pod okrilje IEEE
802.15, so razdeljene takole:
IEEE 802.15.1: Delovna skupina 1 (ang. WPAN/Bluetooth)
Ta skupina temelji na Bluetooth tehnologiji. Njena naloga je definirati (PHY) fizično plast in
(MAC) plast za brezžično povezovanje nepremičnih, premičnih in prenosnih naprav ter
dostop do osebnega omrežja.
IEEE 802.15.2: Delovna skupina 2 (ang. Coexistence)
Njena naloga je definirati obstoj WPAN v primerjavi z drugimi brezžičnimi napravami, ki
delujejo v nelicenciranem frekvenčnem pasu, kot je WLAN. Ta skupina sedaj miruje.
IEEE 802.15.3: Delovna skupina 3 (ang. High rate WPAN)
Njena naloga je definirati PHY in MAC standard za hitre prenose podatkov v WPAN
(11 do 55 Mbit/s).
IEEE 802.15.4: Delovna skupina 4 (ang. Low rate WPAN)
Njena naloga je definirati standarde za zagotavljanje prenosa za nižje podatkovne hitrosti
in sestaviti nezahtevna omrežja. Velik poudarek ima na tem, da naprave v omrežju
porabijo zelo malo energije tako v stanju prenosa kot v stanju mirovanja. Ta skupina je
definirala fizično plast (PHY) in plast podatkovne povezave (MAC). Hkrati pa ta
tehnologija temelji na OSI modelu. Sem spada tudi protokol ZigBee (IEEE 802.15.4) ter
protokol MiWi, ki smo ga natančno opisali v diplomskem delu.
IEEE 802.15.5: Delovna skupina 5 (ang. Mesh networking)
Tu je definirana arhitektura ogrodja WPAN naprav, ki spodbujajo stabilno in razširjeno
brezžično mešano omrežje. Ta standard je sestavljen iz dveh delov. To sta nizkohitrostno
WPAN mešano omrežje in visokohitrostno WPAN mešano omrežje. Nizkohitrostno WPAN
mešano omrežje temelji na IEEE 802.15.4, medtem ko visokohitrostno WPAN mešano
omrežje temelji na IEEE 802.15.3. Skupni imenovalec obeh mešanih omrežij je
inicializacija omrežja, naslavljanje in večpodročno skakanje. Prav tako nizkohitrostno
Brezžično senzorsko omrežje MiWi
4
WPAN mešano omrežje podpira pošiljanje podatkov v vse smeri (ang. multicasting),
zanesljiv prenos podatkov do skupine (ang. broadcasting) ter sledenje podatkom. Podpira
tudi funkcijo varčevanja z energijo. Visoko hitrostno WPAN mešano omrežje podpira
večpodročno, časovno usklajeno storitev skakanja.
IEEE 802.15.6: Delovna skupina 6 (BAN)
Ta skupina je osredotočena na tehnologijo BAN. Zahteve za to tehnologijo so zelo majhne
moči, nizke frekvence ter kratek domet omrežja.
IEEE 802.15.7: Delovna skupina 7 (VLC)
Ta skupina temelji na VLC. To so standardi za prostorsko komunikacijo s pomočjo vidne
svetlobe.
Delovna skupina IEEE 802.15 pripravlja standard in razvoj naprav glede na spodnje
zahteve:
nizka cena razvoja posamezne naprave,
majhna poraba energije na posamezni napravi,
čim manjša velikost naprav,
zagotavljanje dovolj visoke varnosti pri komunikaciji v omrežju,
souporaba z drugimi brezžičnimi omrežji.
Znotraj delovne skupine IEEE 802.15 so najpomembnejše štiri skupine. Te skupine
drugače imenujemo tudi TG. Te štiri skupine so IEEE 802.15.1 do IEEE 802.15.4 in se
med seboj razlikujejo predvsem po hitrosti prenašanja podatkov, porabi energije ter
kvaliteti storitev QoS.
QoS pomeni zagotavljanje boljše kvalitete storitev delujočega omrežja. To pomeni
pravilno razporejanje različnih prioritet glede na stopnjo zahtevnosti aplikacij, ki jih
omrežje izvaja.
6LoWPAN je mednarodna delovna skupina združenja IETF [5], ki razvija in promovira
internetne standarde in tesno sodeluje z W3C [6] in ISO [7] / IEC [8], organi za
standardizacijo, ki se ukvarjajo predvsem s standardi za Internet Protocol (TCP/IP). To je
odprta organizacija za standardizacijo, brez formalnega članstva ali članskih zahtev.
Brezžično senzorsko omrežje MiWi
5
3 WPAN STANDARD IEEE 802.15.4
IEEE 802.15.4 je standard, ki opisuje PHY plast in MAC plast za nizkohitrostno WPAN
omrežje (LR-WPAN). Vzdržuje ga skupina IEEE 802.15. To je osnova za brezžične
protokole ZigBee, MiWi, ISA100.11a [9] in WirelessHART [10]. Naprave po tem standardu
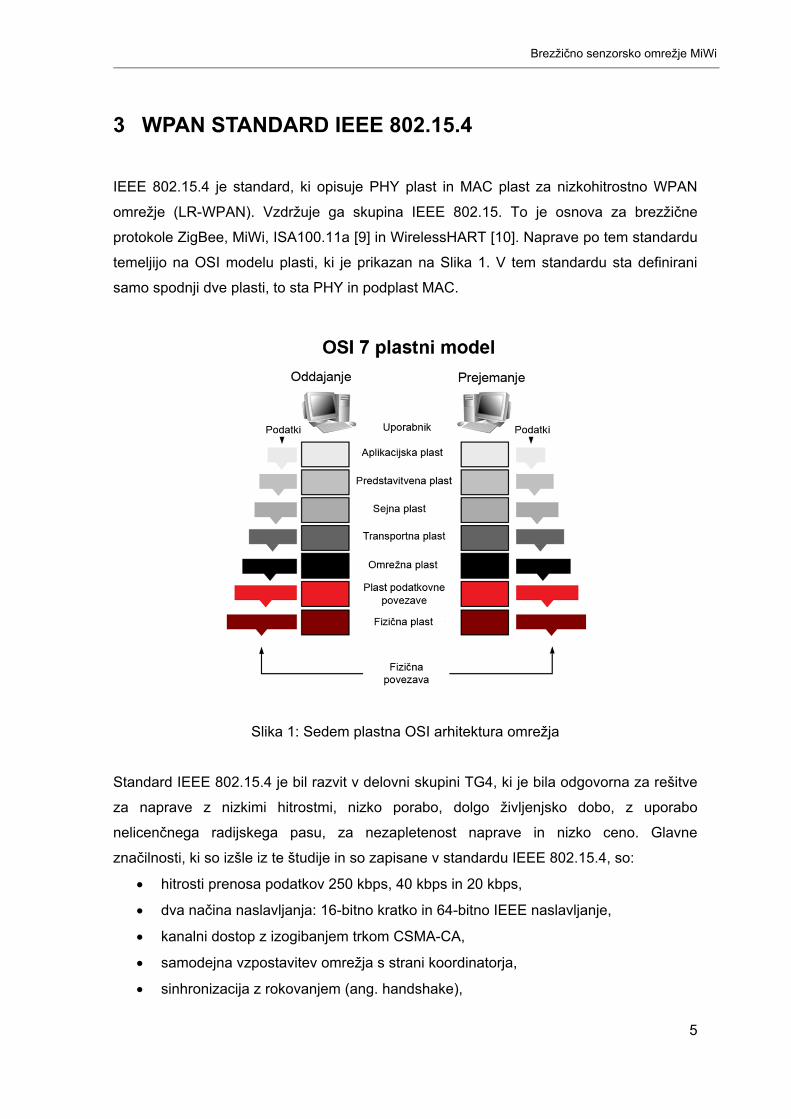
temeljijo na OSI modelu plasti, ki je prikazan na Slika 1. V tem standardu sta definirani
samo spodnji dve plasti, to sta PHY in podplast MAC.
Slika 1: Sedem plastna OSI arhitektura omrežja
Standard IEEE 802.15.4 je bil razvit v delovni skupini TG4, ki je bila odgovorna za rešitve
za naprave z nizkimi hitrostmi, nizko porabo, dolgo življenjsko dobo, z uporabo
nelicenčnega radijskega pasu, za nezapletenost naprave in nizko ceno. Glavne
značilnosti, ki so izšle iz te študije in so zapisane v standardu IEEE 802.15.4, so:
hitrosti prenosa podatkov 250 kbps, 40 kbps in 20 kbps,
dva načina naslavljanja: 16-bitno kratko in 64-bitno IEEE naslavljanje,
kanalni dostop z izogibanjem trkom CSMA-CA,
samodejna vzpostavitev omrežja s strani koordinatorja,
sinhronizacija z rokovanjem (ang. handshake),
Brezžično senzorsko omrežje MiWi
6
upravljanje s porabo energije za zagotovitev nizke porabe energije,
16 kanalov v pasu 2,4 GHz ISM, 10 kanalov v 915 MHz in 1 kanal v pasu 868
MHz.
Aplikacije, ki temeljijo na standardu IEEE 802.15.4, se uporabljajo tako v industriji kot v
domači uporabi. Uporabljajo se na različnih področjih. Ta področja so: industrija (nadzor in
krmiljenje zahtevnih industrijskih procesov), avtomatizacija in varnost tako doma kot v
industriji (tu gre za nadzor nad krmiljenjem ogrevanja, prezračevanja in klimatizacije,
nadzor razsvetljave, protivlomni sistemi, protipožarni sistemi), medicina (postavitev
senzorjev za nadzor telesnih funkcij v rehabilitaciji in telesni vadbi), kmetijstvo (tu gre za
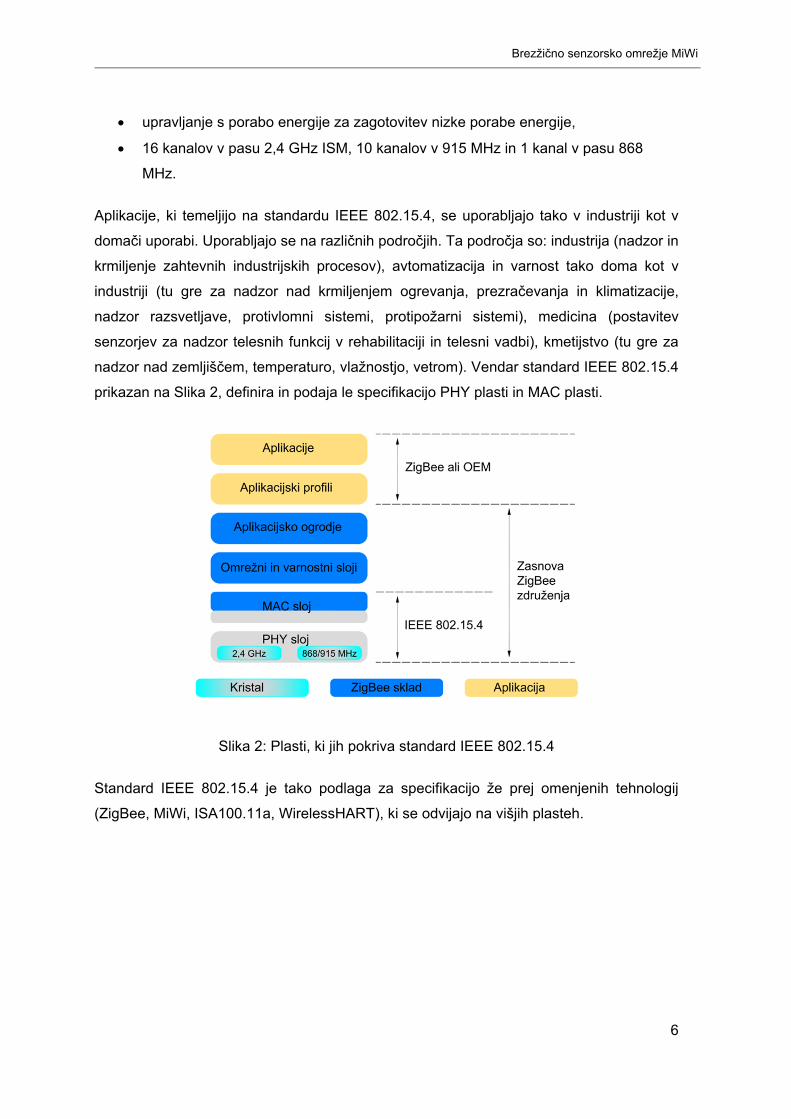
nadzor nad zemljiščem, temperaturo, vlažnostjo, vetrom). Vendar standard IEEE 802.15.4
prikazan na Slika 2, definira in podaja le specifikacijo PHY plasti in MAC plasti.
Slika 2: Plasti, ki jih pokriva standard IEEE 802.15.4
Standard IEEE 802.15.4 je tako podlaga za specifikacijo že prej omenjenih tehnologij
(ZigBee, MiWi, ISA100.11a, WirelessHART), ki se odvijajo na višjih plasteh.
Brezžično senzorsko omrežje MiWi
7
4 IEEE 802.15.4 ZIGBEE
Standard IEEE 802.15.4 podaja zahteve oziroma specifikacije za PHY plast in MAC plast.
Vse preostale višje plasti v modelu OSI so definirane s strani ZigBee Alliance [11]
(združenje, ki je definiralo brezžični protokol ZigBee).
4.1 Zgodovina razvoja ZigBee
Brezžično omrežje tipa ZigBee je bilo prvič predstavljeno leta 1998, ko je večina
razvijalcev in postavljalcev ugotovila, da vsa ostala omrežja, ki so se trenutno uporabljala
(IR, RF, WiFi, Bluetooth), postajajo neprimerna za določene aplikacije. Zato so nekateri
inženirji videli potrebo po digitalnih radijskih omrežjih, ki bi bila sposobna
samoorganizacije in nadzora. Standard IEEE 802.15.4 je bil določen maja 2003. V poletju
leta 2003 je podjetje Philips Semiconductors, ki je bilo največje v omrežni podpori z
udeležbo, postalo član ZigBee Alliance in napredovalo v glavno članico tega združenja.
ZigBee Alliance je združenje, ki združuje člane (podjetja in posameznike), ki se ukvarjajo
z razvojem in nadzorom nad ZigBee tehnologijo. ZigBee Alliance je oktobra 2004
naznanila, da se je v začetku tega leta njeno članstvo več kot podvojilo in povečalo
združenje za več kot 100 podjetij v 22 državah. V aprilu 2005 se je povečalo na več kot
150 podjetij, decembra 2005 pa je zrastlo na preko 200 podjetij. 14. decembra so bile
potrjene specifikacije za protokol ZigBee. 13. junija 2005 je ZigBee Alliance v javnost
izdalo ZigBee specifikacijo IEEE 802.15.4, ki je bila definirana oz. potrjena kot ZigBee
specifikacija iz leta 2004. Septembra 2004 je ZigBee Alliance izdala v javnost kompletno
specifikacijo in standard IEEE 802.15.4. Nato je bila izdana leta 2007 dopolnitev IEEE
802.15.4, danes poznan kot ZigBee Specification [12], ki je tudi danes zadnja verzija
protokola ZigBee. Leta 2009 je ZigBee Alliance izdala ZigBee RF4CE specifikacijo, ki
vsebuje daljinski nadzor omrežja in definira preprosto, robustno in poceni komunikacijsko
omrežje. To omrežje omogoča brezžično povezavo v aplikacijah za potrošniško
elektroniko.
Brezžično senzorsko omrežje MiWi
8
4.2 Opis ZigBee protokola
ZigBee lahko predstavimo kot neko rešitev (standard) brezžičnih omrežij v stavbah z zelo
nizkimi stroški in zelo majhno porabo električne energije. To je dvostranska komunikacija.
Protokol je bil vzdrževan pri ZigBee Alliance (združenje proizvajalcev in razvijalcev ZigBee
protokola), ki razvija specifikacije in certificira pravilno implementacijo. Zadnja verzija
specifikacije je bila izdana leta 2007. Uporablja se v uporabniški elektroniki, doma za
avtomatizacijo stavb, v industriji za nadzor kor PC periferija, v medicini kot medicinski
senzorji, otroške igrače in igre.
V njem je uporabljen nedavno raziskan algoritemski protokol Ad-hoc On-demand
Distance Vector (AODV) [13], katerega osnovni princip temelji na varčevanju in
samodejni izgradnji malohitrostnega ad-hoc omrežja vozlišč. To pomeni, da se
komunikacija v omrežju uporablja samo takrat, kadar je povezava potrebna. Omrežno
vozlišče, ki potrebuje povezavo, pošlje broadcast zahtevo (v obliki sporočila) za povezavo.
Ostala AODV vozlišča pošljejo to sporočilo naprej in si zapomnijo, od katerega vozlišča so
dobili sporočilo, hkrati pa kreirajo začasne poti, če bodo kdaj rabila to potrebno vozlišče.
Ko vozlišče sprejme takšno sporočilo in že ima pot do željenega vozlišča, pošlje sporočilo
nazaj preko začasne poti proti zahtevanemu vozlišču. Potrebno vozlišče potem začne
uporabljati pot, ki ima najmanjše število skokov (preskokov) skozi ostala vozlišča.
Neuporabljene poti v tabeli poti se po določenem času reciklirajo (pobrišejo).
Če povezava ne uspe, se pošlje nazaj v vozlišče, ki oddaja napako povezave in postopek
se ponovi.
V omrežjih, kjer nimamo omogočen prenos signalizacije (ang. non-beacon enabled
networks), je uporabljen CSMA-CA [14] mehanizem dostopa do kanala. V takšnem
omrežju ima ZigBee usmerjevalnik svoje sprejemnike neprestano vključene, zato to
zahteva malo bolj zmogljivejše napajanje. Tipičen primer osnovnega gradnika takšnega
omrežja je brezžično stikalo za luč. ZigBee vozlišče v luči konstantno sprejema od
trenutka, ko je spojeno na vir energije, medtem ko je baterijsko napajano stikalo v stanju
mirovanja, dokler stikalo ni sproženo. Stikalo se takrat zbudi in pošlje ukaz na luč. Nato
čaka na potrditev in gre nazaj v stanje mirovanja. V takšnih omrežjih je luč kot ZigBee
usmerjevalnik ali ZigBee koordinator, medtem ko je stikalo tipična ZigBee končna
naprava.
V omrežjih, kjer imamo omogočen prenos signalizacije (ang. beacon enabled networks),
omrežna vozlišča, imenovana ZigBee usmerjevalniki, periodično oddajajo signalizacijo, da
potrdijo svojo prisotnost drugim omrežnim vozliščem. Vozlišča lahko mirujejo med
Brezžično senzorsko omrežje MiWi
9
periodičnimi prenosi signalizacije, ker s tem zmanjšajo cikel delovanja (ang. duty cycle) in
podaljšajo čas delovanja baterije. Dolžina intervalov med prenosom signalizacije je
odvisna od frekvenčnega pasu, uporabljenega za ZigBee (868/915 MHz ali 2,4 GHz).
Višja, kot je frekvenca, krajši so intervali in večja je zahteva po časovni točnosti. To pa ni
več v kontekstu (ang. low-cost) cenene naprave. Beacon je nek okvir podatkov (paket), ki
se pošilja v nekem časovnem intervalu (ang. beacon interval). Ta okvir (paket) je v bistvu
sinhronizacija omrežja. Pošilja jih ZC, da pripravi ostale naprave na prenos podatka, hkrati
pa ta paket ostale naprave v omrežju »prebudi«. Spravi jih iz stanja mirovanja v stanje
pripravljenosti. S tem se poraba energije na napravah zmanjša.
Beacon predstavlja paket specifične bitne dolžine, od katerega je približno polovica bitov
glava in CRC polje. Tako kot pri ostalih paketih (okvirjih) glava vsebuje izvorni in ciljni
MAC naslov ter vse ostale informacije v zvezi s komunikacijskim procesom. Ciljni naslov
je vedno nastavljen tako, da se pošlje k vsem napravam v omrežju, zato se imenuje MAC
naslov (ang. broadcast medium access control). To prisili vse naprave na določenem
kanalu, da sprejmejo in obdelajo vsak beacon okvir. CRC polje služi za detekcijo napak
pri pošiljanju. Ostala koristna vsebina beacon okvirja vsebuje podatke:
beacon interval (BI): to je čas, ki poteče med dvema poslanima beacon okvirjema,
časovni zapis (ang. time stamp): ko naprava sprejme beacon okvir, uporabi
vrednost za nastavitev časa lokalne ure,
podatkovne hitrosti, ki so podprte v omrežju (ang. supported rates),
ime omrežja (SSID),
nastavitev parametrov (ang. parameter sets): informacija o metodi signalizacije v
omrežju,
tabela indikacije prometa (TIM): omrežje pošlje povratno informacijo o tem, katera
naprava je v stanju mirovanja, in v svojem notranjem pomnilniku še vedno
zadržuje podatkovne okvirje.
S povečevanjem beacon intervala zmanjšamo število beacon okvirjev in možnost
zasičenja, vendar to povzroči zamudo pri procesu gostovanja (ang. roaming) zato, ker
naprave v omrežju pri skeniranju lahko izpustijo beacon okvir in morajo zato počakati na
novega.
Z zmanjševanjem beacon intervala povečamo število beacon okvirjev, in s tem povečamo
odzivnost naprav v omrežju, toda s tem vodimo omrežje v zasičenje oziroma v prekinitev
delovanja. S tem silimo naprave v omrežju, da so dalj časa v stanju pripravljenosti in
Brezžično senzorsko omrežje MiWi
10
povečujemo porabo energije naprav v omrežju. V idealnem omrežju beacon okvirji
dominirajo nad ostalim prometom v omrežju.
V splošnem ZigBee protokoli zmanjšajo čas oddajanja oziroma zasedenosti medija (ang.
radio), s tem pa zmanjšajo porabo energije (baterija).
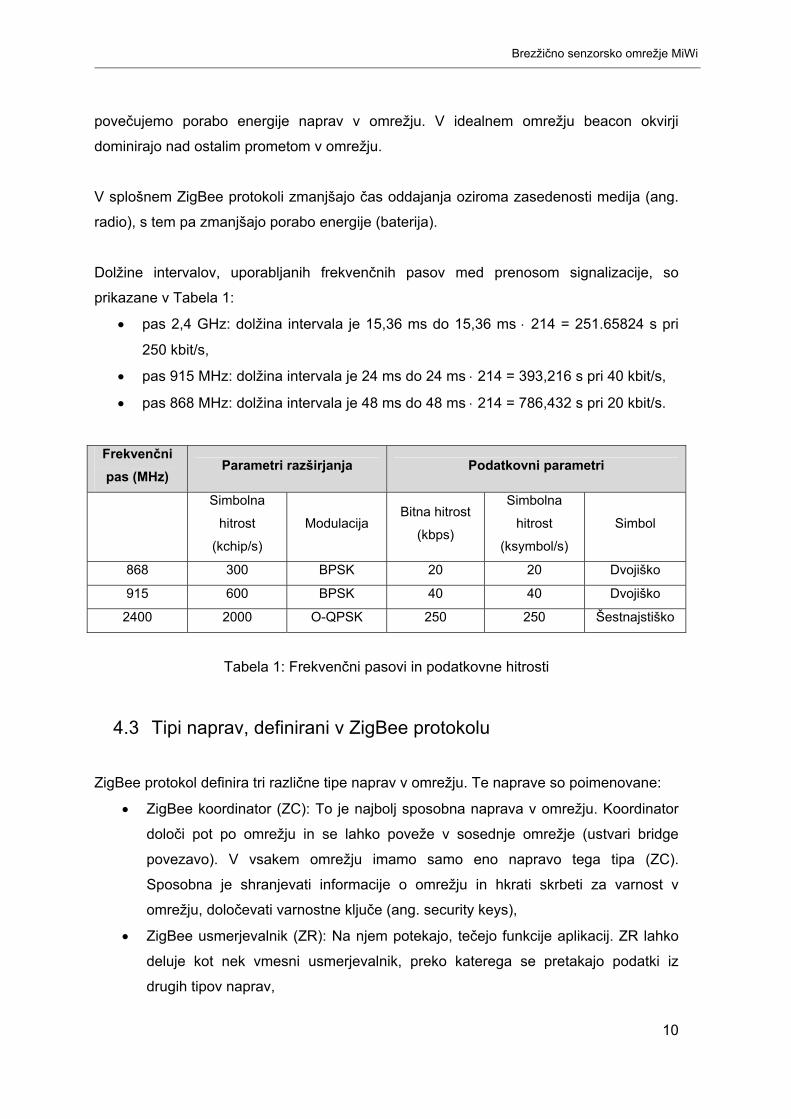
Dolžine intervalov, uporabljanih frekvenčnih pasov med prenosom signalizacije, so
prikazane v Tabela 1:
pas 2,4 GHz: dolžina intervala je 15,36 ms do 15,36 ms 214 = 251.65824 s pri
250 kbit/s,
pas 915 MHz: dolžina intervala je 24 ms do 24 ms 214 = 393,216 s pri 40 kbit/s,
pas 868 MHz: dolžina intervala je 48 ms do 48 ms 214 = 786,432 s pri 20 kbit/s.
Frekvenčni
pas (MHz) Parametri razširjanja Podatkovni parametri
Simbolna
hitrost
(kchip/s)
Modulacija Bitna hitrost
(kbps)
Simbolna
hitrost
(ksymbol/s)
Simbol
868 300 BPSK 20 20 Dvojiško
915 600 BPSK 40 40 Dvojiško
2400 2000 O-QPSK 250 250 Šestnajstiško
Tabela 1: Frekvenčni pasovi in podatkovne hitrosti
4.3 Tipi naprav, definirani v ZigBee protokolu
ZigBee protokol definira tri različne tipe naprav v omrežju. Te naprave so poimenovane:
ZigBee koordinator (ZC): To je najbolj sposobna naprava v omrežju. Koordinator
določi pot po omrežju in se lahko poveže v sosednje omrežje (ustvari bridge
povezavo). V vsakem omrežju imamo samo eno napravo tega tipa (ZC).
Sposobna je shranjevati informacije o omrežju in hkrati skrbeti za varnost v
omrežju, določevati varnostne ključe (ang. security keys),
ZigBee usmerjevalnik (ZR): Na njem potekajo, tečejo funkcije aplikacij. ZR lahko
deluje kot nek vmesni usmerjevalnik, preko katerega se pretakajo podatki iz
drugih tipov naprav,
Brezžično senzorsko omrežje MiWi
11
ZigBee končna naprava (ZED): To je končna naprava v omrežju, ki vsebuje ravno
prav funkcionalnosti, da lahko nemoteno komunicira s sosednjimi napravami
(sosednje vozlišče, koordinator, usmerjevalnik). Nima pa sposobnosti, da bi
preusmerjal podatke iz sosednjih naprav. Ta odnos med napravami omogoča, da
je naprava večino časa v stanju spanja (ang. sleep mode) ter na ta način
privarčuje veliko energije. ZED ne potrebuje veliko notranjega pomnilnika, ker ni
naprava, ki bi se s pomočjo zahtevnih algoritmov o nečem odločala.
4.4 Arhitektura protokola ZigBee
ZigBee arhitektura je sestavljena iz skupine blokov, ki jih poimenujemo plasti (ang.
layers). Vsaka plast opravi specifičen nabor storitev (storitev servisov) za plast nad seboj.
Podatkovni nosilec (ang. data entity) priskrbi servis za prenos podatkov (ang. data
transmission service) in upravljanje (ang. management entity) z vsemi ostalimi servisi.
Vsak servis vzpostavi nek vmesnik za plast nad njim skozi SAP (ang. service access
point). Vsak SAP podpira mnogo preprostih servisnih gradnikov (ang. service primitives),
s pomočjo katerih preprosto oziroma enostavno dosežemo uspešno izvrševanje
zahtevane funkcionalnosti.
ZigBee arhitektura, ki je prikazana na Slika 1, temelji na poznanem modelu OSI [15]. Ta je
po definiciji sedemplastni model, toda definira samo tiste plasti, ki so pomembne za
doseganje funkcionalnosti na nameravanem tržišču. Standard IEEE 802.15.4 definira dve
najnižji plasti, to sta:
fizična plast (ang. PHY-physical layer),
plast podatkovne povezave (ang. MAC-medium access control).
ZigBee združenje gradi na temelju zagotavljanja omrežne plasti (NWK) in ogrodja (ang.
framework) za aplikacijsko plast, ki je vsebovan v aplikacijsko podporni podplasti (APS), v
aplikacijskem objektu (ZDO), definiranem s strani izdelovalca.
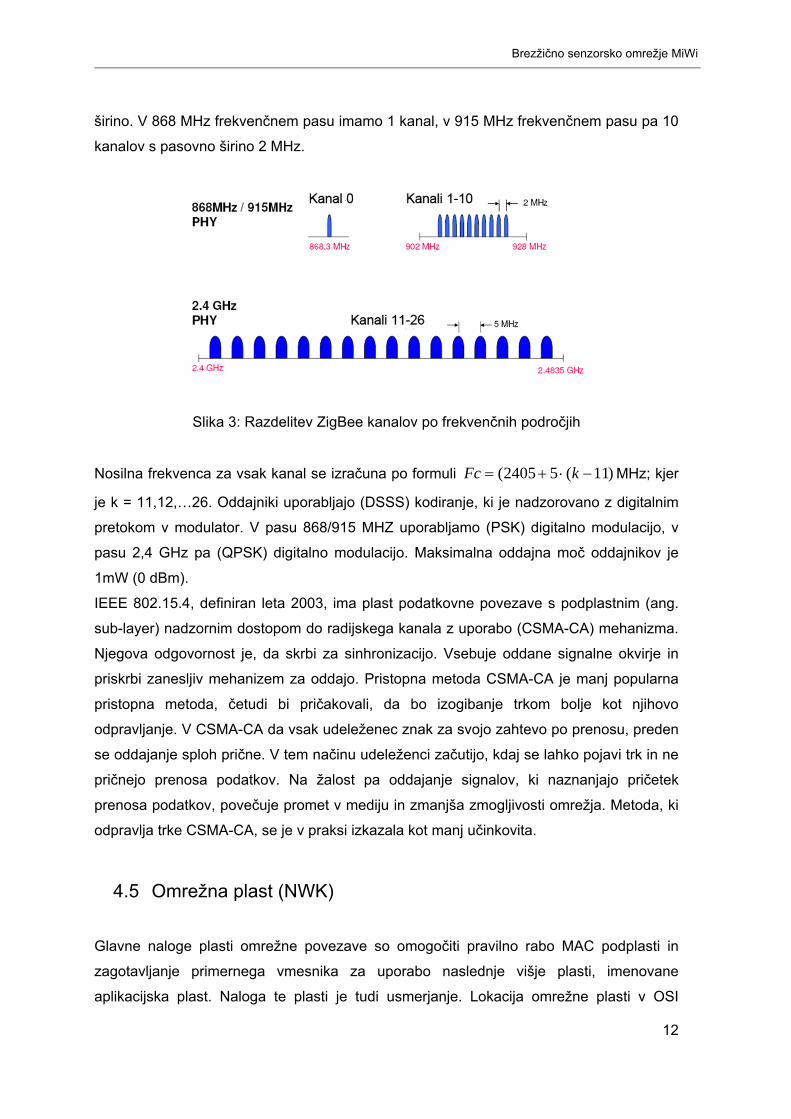
IEEE 802.15.4, definiran leta 2003, prikazan na Slika 3, ima dve fizični plasti, ki delujeta
na dveh ločenih frekvenčnih področjih: 868/915 MHz in 2,4 GHz. Nižje frekvenčno
področje fizične plasti pokriva oba frekvenčna pasa, tako evropskega 868 MHz, kot 915
MHz frekvenčni pas, ki se uporablja v državah, kot so USA in Avstralija. Višji frekvenčni
pas fizične plasti 2,4 GHz je uporabljen navidezno po celem svetu. V 2,4 GHz
frekvenčnem pasu imamo 16 ZigBee kanalov, kjer vsak kanal zahteva 5 MHz pasovno
Brezžično senzorsko omrežje MiWi
12
širino. V 868 MHz frekvenčnem pasu imamo 1 kanal, v 915 MHz frekvenčnem pasu pa 10
kanalov s pasovno širino 2 MHz.
Slika 3: Razdelitev ZigBee kanalov po frekvenčnih področjih
Nosilna frekvenca za vsak kanal se izračuna po formuli )11(52405( kFc MHz; kjer
je k = 11,12,…26. Oddajniki uporabljajo (DSSS) kodiranje, ki je nadzorovano z digitalnim
pretokom v modulator. V pasu 868/915 MHZ uporabljamo (PSK) digitalno modulacijo, v
pasu 2,4 GHz pa (QPSK) digitalno modulacijo. Maksimalna oddajna moč oddajnikov je
1mW (0 dBm).
IEEE 802.15.4, definiran leta 2003, ima plast podatkovne povezave s podplastnim (ang.
sub-layer) nadzornim dostopom do radijskega kanala z uporabo (CSMA-CA) mehanizma.
Njegova odgovornost je, da skrbi za sinhronizacijo. Vsebuje oddane signalne okvirje in
priskrbi zanesljiv mehanizem za oddajo. Pristopna metoda CSMA-CA je manj popularna
pristopna metoda, četudi bi pričakovali, da bo izogibanje trkom bolje kot njihovo
odpravljanje. V CSMA-CA da vsak udeleženec znak za svojo zahtevo po prenosu, preden
se oddajanje sploh prične. V tem načinu udeleženci začutijo, kdaj se lahko pojavi trk in ne
pričnejo prenosa podatkov. Na žalost pa oddajanje signalov, ki naznanjajo pričetek
prenosa podatkov, povečuje promet v mediju in zmanjša zmogljivosti omrežja. Metoda, ki
odpravlja trke CSMA-CA, se je v praksi izkazala kot manj učinkovita.
4.5 Omrežna plast (NWK)
Glavne naloge plasti omrežne povezave so omogočiti pravilno rabo MAC podplasti in
zagotavljanje primernega vmesnika za uporabo naslednje višje plasti, imenovane
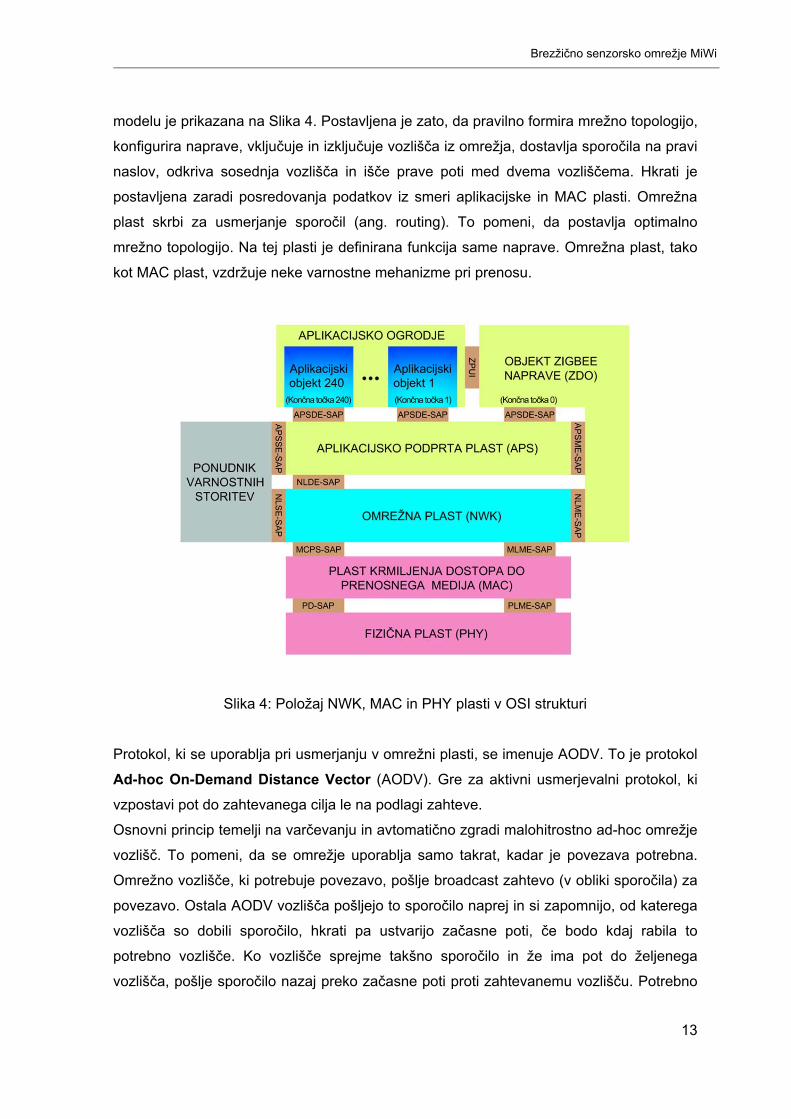
aplikacijska plast. Naloga te plasti je tudi usmerjanje. Lokacija omrežne plasti v OSI
Brezžično senzorsko omrežje MiWi
13
modelu je prikazana na Slika 4. Postavljena je zato, da pravilno formira mrežno topologijo,
konfigurira naprave, vključuje in izključuje vozlišča iz omrežja, dostavlja sporočila na pravi
naslov, odkriva sosednja vozlišča in išče prave poti med dvema vozliščema. Hkrati je
postavljena zaradi posredovanja podatkov iz smeri aplikacijske in MAC plasti. Omrežna
plast skrbi za usmerjanje sporočil (ang. routing). To pomeni, da postavlja optimalno
mrežno topologijo. Na tej plasti je definirana funkcija same naprave. Omrežna plast, tako
kot MAC plast, vzdržuje neke varnostne mehanizme pri prenosu.
Slika 4: Položaj NWK, MAC in PHY plasti v OSI strukturi
Protokol, ki se uporablja pri usmerjanju v omrežni plasti, se imenuje AODV. To je protokol
Ad-hoc On-Demand Distance Vector (AODV). Gre za aktivni usmerjevalni protokol, ki
vzpostavi pot do zahtevanega cilja le na podlagi zahteve.
Osnovni princip temelji na varčevanju in avtomatično zgradi malohitrostno ad-hoc omrežje
vozlišč. To pomeni, da se omrežje uporablja samo takrat, kadar je povezava potrebna.
Omrežno vozlišče, ki potrebuje povezavo, pošlje broadcast zahtevo (v obliki sporočila) za
povezavo. Ostala AODV vozlišča pošljejo to sporočilo naprej in si zapomnijo, od katerega
vozlišča so dobili sporočilo, hkrati pa ustvarijo začasne poti, če bodo kdaj rabila to
potrebno vozlišče. Ko vozlišče sprejme takšno sporočilo in že ima pot do željenega
vozlišča, pošlje sporočilo nazaj preko začasne poti proti zahtevanemu vozlišču. Potrebno
Brezžično senzorsko omrežje MiWi
14
vozlišče potem začne uporabljati pot, ki ima najmanjše število skokov (preskokov) skozi
ostala vozlišča. Neuporabljene poti v tabeli poti se po določenem času reciklirajo
(izbrišejo).
Če povezava ne uspe, se pošlje nazaj v vozlišče, ki oddaja sporočilo »napaka povezave«
in postopek se ponovi.
4.6 Aplikacijsko podporna plast (APS)
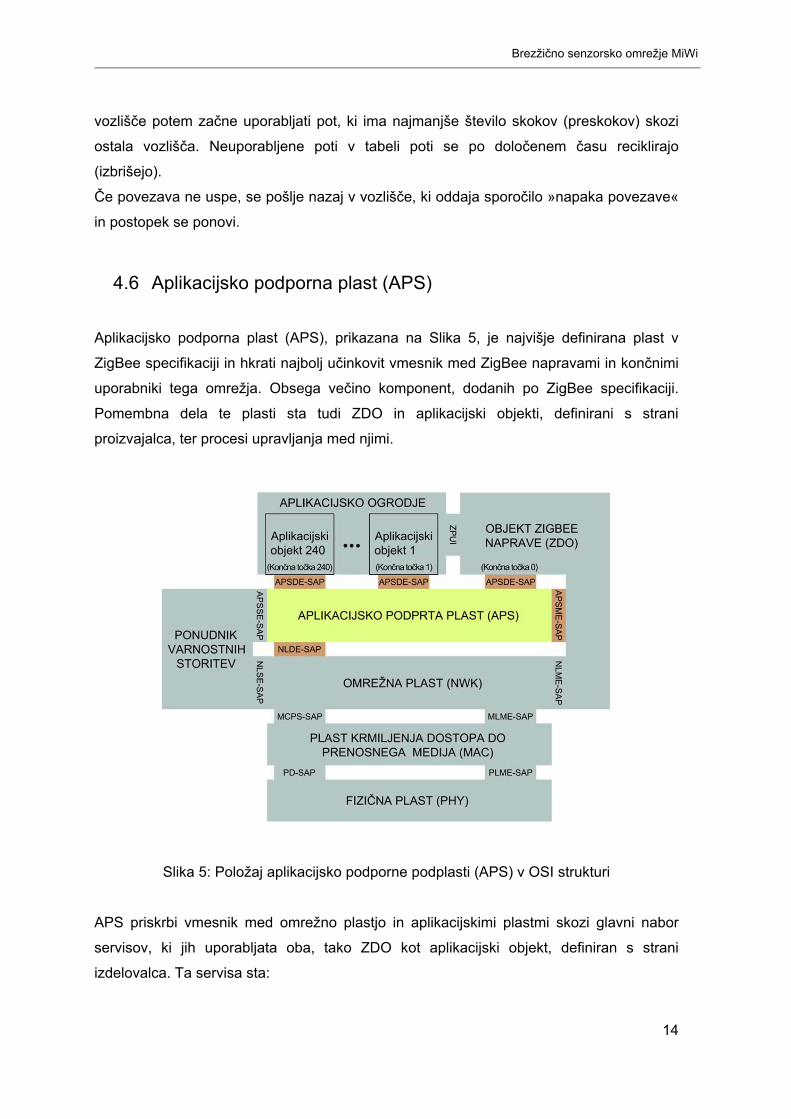
Aplikacijsko podporna plast (APS), prikazana na Slika 5, je najvišje definirana plast v
ZigBee specifikaciji in hkrati najbolj učinkovit vmesnik med ZigBee napravami in končnimi
uporabniki tega omrežja. Obsega večino komponent, dodanih po ZigBee specifikaciji.
Pomembna dela te plasti sta tudi ZDO in aplikacijski objekti, definirani s strani
proizvajalca, ter procesi upravljanja med njimi.
Slika 5: Položaj aplikacijsko podporne podplasti (APS) v OSI strukturi
APS priskrbi vmesnik med omrežno plastjo in aplikacijskimi plastmi skozi glavni nabor
servisov, ki jih uporabljata oba, tako ZDO kot aplikacijski objekt, definiran s strani
izdelovalca. Ta servisa sta:
Brezžično senzorsko omrežje MiWi
15
podatkovni servis,
upravljalni servis.
APSDE priskrbi podatkovni oddajni servis preko nase povezanega SAP, APSDE-SAP-u.
APSME priskrbi upravljalni servis preko nase povezanega SAP, APSME-SAP-u in
vzdržuje podatkovno bazo z upravljanimi objekti, poznanimi pod imenom AIB.
ZigBee arhitektura vsebuje mnogo plasti in njihovih komponent, vključno z IEEE 802.14.5-
2003 MAC plastjo, PHY plastjo in ZigBee NWK plastjo. Vsaka komponenta nudi aplikacijo
s svojim naborom servisov in s svojimi zmožnostmi. ZigBee aplikacijsko plast sestavljajo:
APS, ZDO in aplikacijski objekt, definiran s strani izdelovalca.
Odgovornost APS vsebuje:
vzdrževanje tabele za povezave, definirane kot sposobnost prilagajanja dveh
naprav skupaj, ki temelji na njihovih servisih in potrebah,
odpošiljanje sporočil med povezanimi napravami,
definicija naslova skupine, odstranjevanje in filtracija sporočil naslovljenih skupin,
preslikava naslovov iz 64 bit IEEE naslovov v 16 bit NWK naslove,
fregmentacija in ponovna sestava ter zanesljiv prenos podatkov.
Odgovornost ZDO vsebuje:
definiranje vloge naprave znotraj omrežja,
raziskovanje naprav v omrežju in določitev katero servisno aplikacijo priskrbeti,
začetek in/ali odgovor ob zahtevi za povezavo,
vzpostavljanje varne povezave med omrežnimi napravami.
4.7 Aplikacijsko ogrodje (AF)
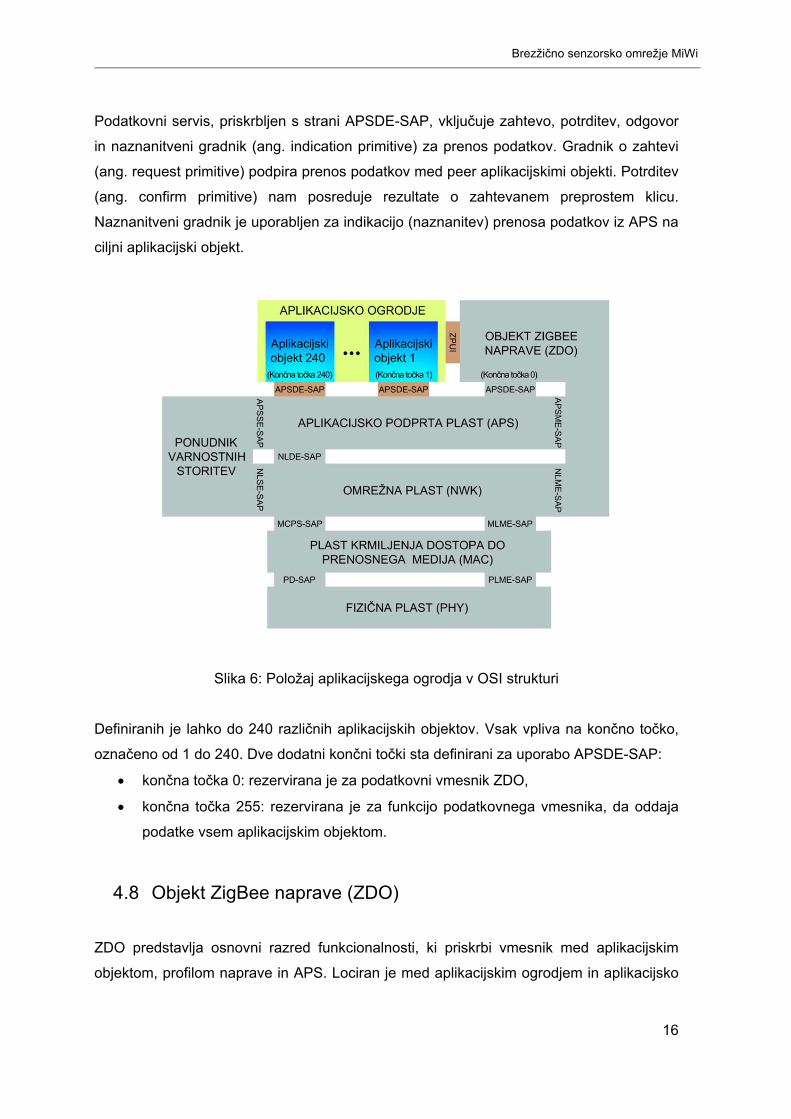
Aplikacijsko ogrodje, prikazano na Slika 6, je okolje, v katerem aplikacijski objekti
gostujejo na ZigBee napravah. Znotraj aplikacijskega ogrodja aplikacijski objekt pošilja in
sprejema podatke skozi APSDE-SAP. Aplikacijski objekt opravi funkcije skozi naslednje
ZDO javne vmesnike:
nadzor in upravljanje protokolnih plasti v ZigBee napravah,
posvetitev standardnim omrežnim funkcijam.
Brezžično senzorsko omrežje MiWi
16
Podatkovni servis, priskrbljen s strani APSDE-SAP, vključuje zahtevo, potrditev, odgovor
in naznanitveni gradnik (ang. indication primitive) za prenos podatkov. Gradnik o zahtevi
(ang. request primitive) podpira prenos podatkov med peer aplikacijskimi objekti. Potrditev
(ang. confirm primitive) nam posreduje rezultate o zahtevanem preprostem klicu.
Naznanitveni gradnik je uporabljen za indikacijo (naznanitev) prenosa podatkov iz APS na
ciljni aplikacijski objekt.
Slika 6: Položaj aplikacijskega ogrodja v OSI strukturi
Definiranih je lahko do 240 različnih aplikacijskih objektov. Vsak vpliva na končno točko,
označeno od 1 do 240. Dve dodatni končni točki sta definirani za uporabo APSDE-SAP:
končna točka 0: rezervirana je za podatkovni vmesnik ZDO,
končna točka 255: rezervirana je za funkcijo podatkovnega vmesnika, da oddaja
podatke vsem aplikacijskim objektom.
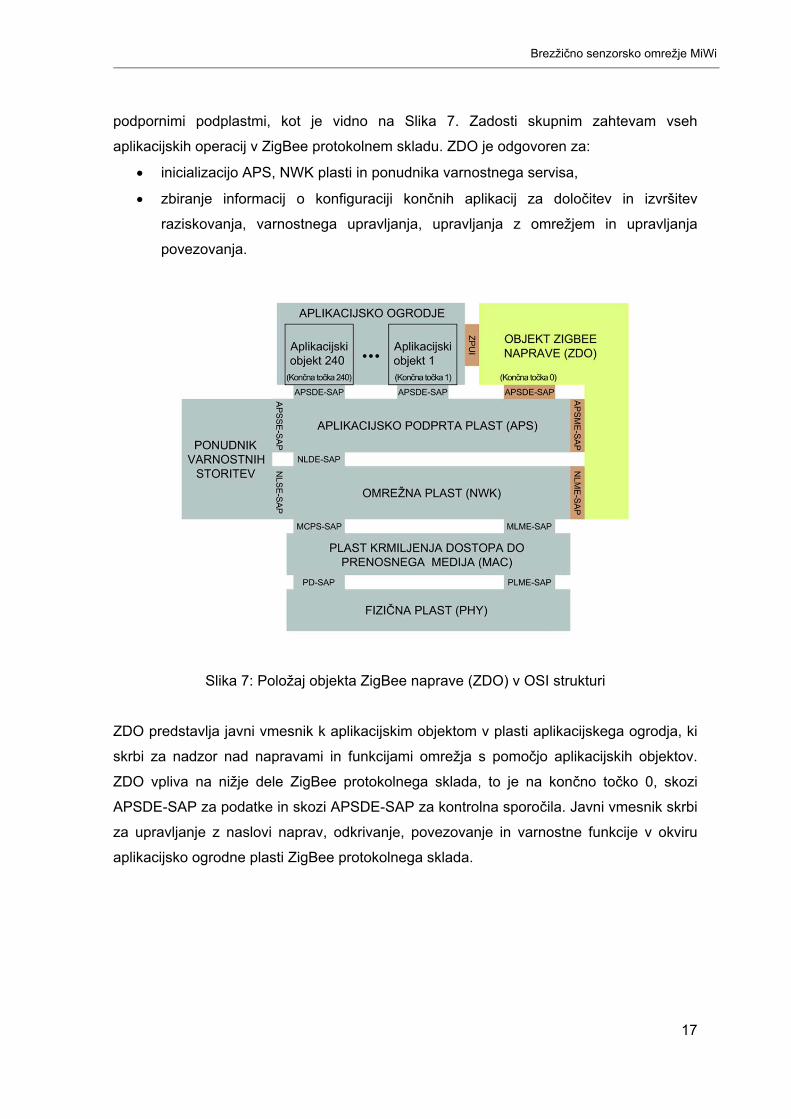
4.8 Objekt ZigBee naprave (ZDO)
ZDO predstavlja osnovni razred funkcionalnosti, ki priskrbi vmesnik med aplikacijskim
objektom, profilom naprave in APS. Lociran je med aplikacijskim ogrodjem in aplikacijsko
Brezžično senzorsko omrežje MiWi
17
podpornimi podplastmi, kot je vidno na Slika 7. Zadosti skupnim zahtevam vseh
aplikacijskih operacij v ZigBee protokolnem skladu. ZDO je odgovoren za:
inicializacijo APS, NWK plasti in ponudnika varnostnega servisa,
zbiranje informacij o konfiguraciji končnih aplikacij za določitev in izvršitev
raziskovanja, varnostnega upravljanja, upravljanja z omrežjem in upravljanja
povezovanja.
Slika 7: Položaj objekta ZigBee naprave (ZDO) v OSI strukturi
ZDO predstavlja javni vmesnik k aplikacijskim objektom v plasti aplikacijskega ogrodja, ki
skrbi za nadzor nad napravami in funkcijami omrežja s pomočjo aplikacijskih objektov.
ZDO vpliva na nižje dele ZigBee protokolnega sklada, to je na končno točko 0, skozi
APSDE-SAP za podatke in skozi APSDE-SAP za kontrolna sporočila. Javni vmesnik skrbi
za upravljanje z naslovi naprav, odkrivanje, povezovanje in varnostne funkcije v okviru
aplikacijsko ogrodne plasti ZigBee protokolnega sklada.
Brezžično senzorsko omrežje MiWi
18
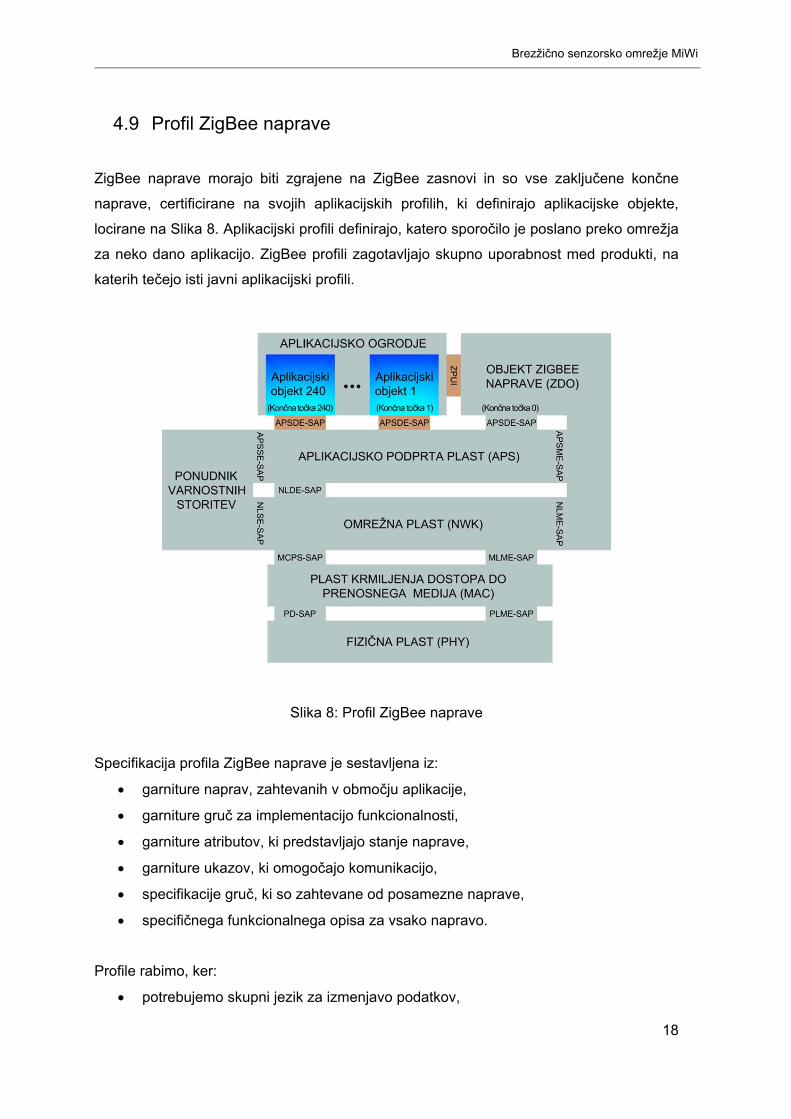
4.9 Profil ZigBee naprave
ZigBee naprave morajo biti zgrajene na ZigBee zasnovi in so vse zaključene končne
naprave, certificirane na svojih aplikacijskih profilih, ki definirajo aplikacijske objekte,
locirane na Slika 8. Aplikacijski profili definirajo, katero sporočilo je poslano preko omrežja
za neko dano aplikacijo. ZigBee profili zagotavljajo skupno uporabnost med produkti, na
katerih tečejo isti javni aplikacijski profili.
Slika 8: Profil ZigBee naprave
Specifikacija profila ZigBee naprave je sestavljena iz:
garniture naprav, zahtevanih v območju aplikacije,
garniture gruč za implementacijo funkcionalnosti,
garniture atributov, ki predstavljajo stanje naprave,
garniture ukazov, ki omogočajo komunikacijo,
specifikacije gruč, ki so zahtevane od posamezne naprave,
specifičnega funkcionalnega opisa za vsako napravo.
Profile rabimo, ker:
potrebujemo skupni jezik za izmenjavo podatkov,
Brezžično senzorsko omrežje MiWi
19
potrebujemo dobro definiran nabor akcij med procesiranjem,
potrebujemo skupno uporabnost med različnimi proizvajalci,
potrebujemo enostavnost in zanesljivost za končne uporabnike,
potrebujemo potrošniško prilagodljivost za produkte,
dovolijo kreiranje trdnih oblik testnih programov,
potrebujemo realistične specifikacije aplikacij, razvite skozi OEM izkušnje.
Profile delimo v dve skupini:
javni profili,
profili, določeni s strani proizvajalca.
Javni profili so:
nadzor v industriji,
hišna avtomatizacija,
avtomatizacija večjih objektov,
aplikacije v telekomunikacijah,
osebna nega in bolnišnična nega,
napredno merjenje različnih veličin.
4.10 Topologija omrežja ZigBee
Topologija je standardni izraz, ki ga največ omrežnih strokovnjakov uporablja, ko
govorijo o načrtovanju omrežja. Izraz topologija, bolj natančno omrežna topologija, se
nanaša na ureditev ali fizično postavitev naprav, kablov in drugih omrežnih
komponent ter njihovih povezav v omrežju. Namesto izraza topologija se uporabljajo
tudi fizična ureditev, razporeditev, oblika omrežja. Razlikovati pa je potrebno med
izrazoma logična in fizična topologija. Fizična topologija se nanaša na fizično
postavitev postaj in medija, logična topologija pa na pot paketov (informacij) po
omrežju. Omrežna topologija vpliva na lastnosti omrežja.
Brezžično senzorsko omrežje MiWi
20
ZigBee omrežna plast (NWK) podpira naslednje topologije omrežja:
Zvezdna topologija (ang. star):
Slika 9: Zvezdna topologija
Drevesna topologija (ang. tree):
Slika 10: Drevesna topologija
Brezžično senzorsko omrežje MiWi
21
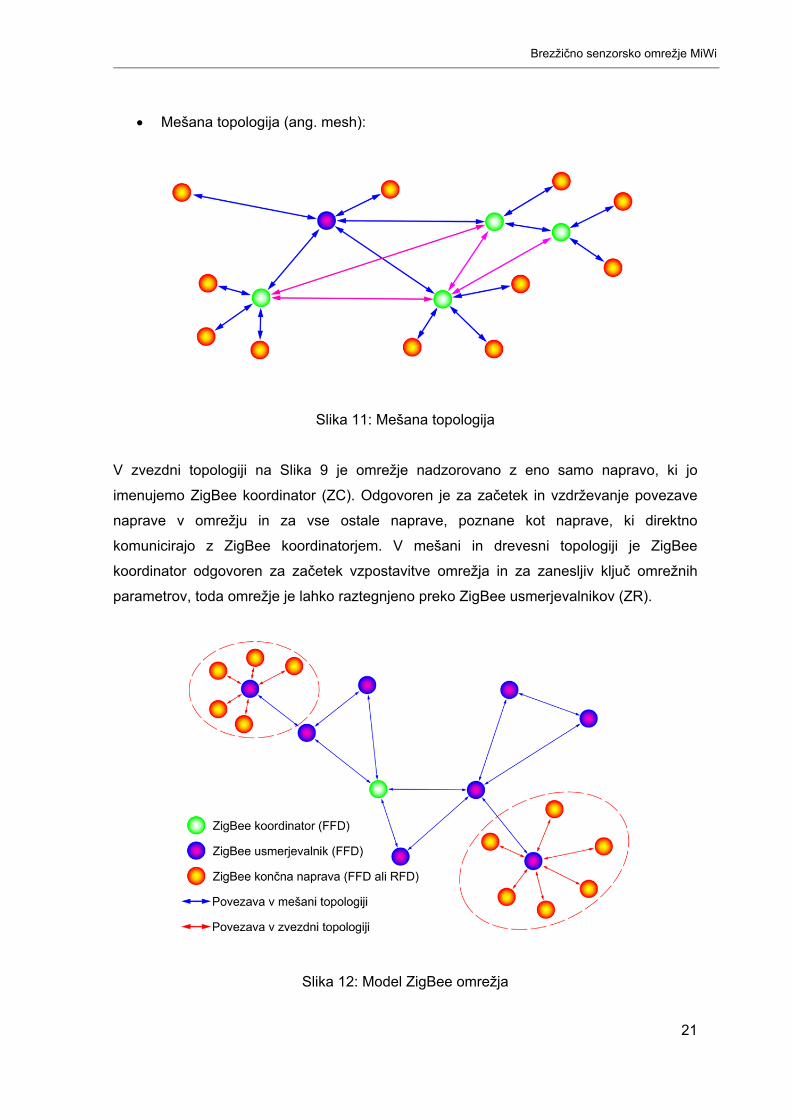
Mešana topologija (ang. mesh):
Slika 11: Mešana topologija
V zvezdni topologiji na Slika 9 je omrežje nadzorovano z eno samo napravo, ki jo
imenujemo ZigBee koordinator (ZC). Odgovoren je za začetek in vzdrževanje povezave
naprave v omrežju in za vse ostale naprave, poznane kot naprave, ki direktno
komunicirajo z ZigBee koordinatorjem. V mešani in drevesni topologiji je ZigBee
koordinator odgovoren za začetek vzpostavitve omrežja in za zanesljiv ključ omrežnih
parametrov, toda omrežje je lahko raztegnjeno preko ZigBee usmerjevalnikov (ZR).
Slika 12: Model ZigBee omrežja

Brezžično senzorsko omrežje MiWi
22
V drevesni topologiji, prikazani na Slika 10, usmerjevalniki prenašajo podatke in kontrolna
sporočila preko omrežja z uporabo hierarhične usmerjevalne strategije. Drevesna
topologija uporablja signalno orientirano komunikacijo, kot je opisana v IEEE 802.14.5-
2003 specifikaciji. Mešana omrežja, kot je na Slika 11, lahko dovolijo samo polno P2P
komunikacijo. ZigBee usmerjevalniki v mešani topologiji ne oddajajo stalne enakomerne
signale, opisane v IEEE 802.14.5-2003 specifikaciji. Ta specifikacija opisuje samo intra-
PAN omrežja, to so omrežja, katerih komunikacije se pričnejo in zaključijo znotraj istega
omrežja.
Brezžično senzorsko omrežje MiWi
23
5 IEEE 802.15.4 MIWI
5.1 Uvod v nastanek MiWi protokola
Ker je celoten protokol ZigBee postal za številne aplikacije preobsežen in preveč
kompleksen, uporablja velik delež alternativnih brezžičnih omrežij lastniške protokole,
skladne z IEEE 802.15.4. MiWi je preprost protokol za stroškovno ugodnejša omrežja z
nizko količino prenosa podatkov in s kratkimi razdaljami v pasu 2,4 GHz, ki velja po vsem
svetu. MiWi in MiWi P2P sta nova brezžična protokola, ki ju je definiralo podjetje
Microchip Technology [16]. Uporabljata majhen digitalen nizkomočnostni oddajnik, ki
temelji na standardu IEEE 802.15.4 (standard za WPAN).
5.2 Razvoj MiWi protokola
Razvoj v regionalno veljavnih pasovih 868 MHz (Evropa in Azija) ter 915 MHz (ZDA) z
MiWi ni mogoč, ker Microchip zavestno stavi na svetovne standarde.
MiWi temelji tako kot ZigBee na standardu IEEE 802.15.4 za brezžična osebna omrežja
(WPAN) in je alternativa za brezžično komunikacijo, ki jo lahko preprosto uporabimo.
Protokol MiWi je občutno manj obsežen kot ZigBee in je primeren predvsem za
uporabnike, ki ne potrebujejo polne zmogljivosti protokola ZigBee, ampak želijo uporabiti
standardni sprejemnik/oddajnik v stroškovno ugodnih zvezdastih omrežjih (ang. star) in
mešanih omrežjih (ang. mash) in P2P, ki so skladna z IEEE 802.15.4. Za sisteme, ki
uporabljajo protokole MiWi, ni potrebno certificiranje. Sklad protokolov je na voljo s prosto
licenco, če se uporablja v kombinaciji z mikrokrmilnikom in sprejemnikom/oddajnikom
MRF24J40 podjetja Microchip. Ta ponudba Microchipa velja tudi za sisteme, ki
uporabljajo protokol ZigBee.
MiWi temelji na plasteh MAC in PHY in se konča že nad omrežno plastjo. Zato omogoča
občutno več svobodnega prostora za lastni razvoj, to pa vsekakor na račun združljivosti in
območja zmogljivosti z uporabo ugodnejšega mikrokrmilnika. Maksimalna velikost
omrežja je zato prav tako nekoliko manjša. Sočasno pa zahteva manjšo velikost spomina.
Programska oprema je manj kompleksna in zmanjšuje potrebne vire strojne opreme. Zato
povsem zadostuje manjši mikrokrmilnik. MiWi tako omogoča preproste, ne preveč
zahtevne aplikacije, ki se mrežijo. Poleg stroškovne prednosti ima MiWi protokol tudi
Brezžično senzorsko omrežje MiWi
24
prednosti glede miniaturizacije in energijske učinkovitosti aplikacije. Protokol omogoča
uporabo funkcije za odkrivanje in nameščanje omrežja, za povezovanje z enim omrežjem
in za odkrivanje vozlišč v omrežju in preusmerjanje le-teh. Ne rešuje problemov, ki so
specifični za aplikacije. Na primer kako izbirate, s katerim omrežjem se želite povezovati,
odločitev, kdaj naj bo povezava prekinjena in kako pogosto komunicirate medsebojno.
Zato je primeren predvsem za osamljene brezžične aplikacije, na primer le vrednotenje
senzorja, krmiljenja gretja v stanovanju ali preprosto krmiljenje luči. Takoj, ko se zahteva
obsežna združljivost in dolgoletna investicijska varnost z zahtevo modularne nadgradnje,
zadane MiWi ob svoje meje.
5.3 Razlaga MiWi protokola
Omrežje, ki uporablja MiWi protokol, je sposobno imeti največ 1024 vozlišč. Vsak
koordinator je sposoben imeti 128 otrok z največ 8 koordinatorjev v omrežju. Paketi lahko
potujejo do največ štiri skoke v omrežju in največ dva skoka stran od PAN koordinatorja.
Pri razlagi MiWi protokola bosta uporabljena dva specifična izraza. Prvi izraz je skupina ali
grozd (ang. cluster). Ta izraz se nanaša na skupino vozlišč, ki tvorijo omrežje. Grozd MiWi
protokola je lahko globok do 3 vozlišča in je nadzorovan z glavo skupine ali grozda (ang.
cluster head). V tej razlagi MiWi protokola bo glava skupine ali grozda kar sam PAN
koordinator.
Naslednji izraz je vtičnica (ang. socket). Vtičnica se nanaša na tako imenovano indirektno
sporočilo v MiWi aplikacijskem vmesniku. Nanaša se na virtualno povezavo med dvema
napravama. Bolje kot to, da imamo izključno žično povezavo med napravami, naprave z
več tipov vtičnic delijo skupni komunikacijski medij in uporabljajo skupne metode
sodelovanja z aplikacijami in napravami. Ko je nova naprava ali aplikacija dodana v
omrežje, zahteva konfiguracijo za komuniciranje z drugimi napravami ali aplikacijami. Z
uporabo vtičnic, vozlišča v omrežju lahko najdejo partnerja za komunikacijo dinamično,
brez da imajo kakršnokoli informacijo o njem.
5.4 Pregled MiWi protokola
MiWi protokol temelji na MAC in PHY plasteh ter njihovih specifikacijah IEEE 802.11.4 in
je ustvarjen za enostaven razvoj omrežij na frekvenčnih področjih 2,4 GHz in nižje.
Protokol zagotavlja funkcije za iskanje, oblikovanje in pridruževanje omrežju, hkrati pa
Brezžično senzorsko omrežje MiWi
25
dobro zagotavlja odkrivanje vozlišč in poti do njih v omrežju. Protokol ne zagotavlja
nobene selektivnosti glede tega, kateremu omrežju se pridružiti, kako ugotoviti, katera pot
je pokvarjena in kako pogosto naprave lahko komunicirajo med seboj.
MiWi protokol uporablja IEEE 802.15.4 standard kot osnovo za razvoj svoje MAC plasti.
Podobno kot v IEEE 802.15.4 MiWi protokol uporablja potrditveni mehanizem prenosa
podatkov DTACK v MAC plasti. Ta metoda uporablja posebno ACK zastavico (ang. flag) v
glavi paketa. Ko je ta ACK zastavica aktivna, pomeni, da se je pojavila zahteva o prejeti
potrditvi s strani oddajnika, ki jo pošlje sprejemnik. Ta potrditev od sprejemnika k
oddajniku pove, da je sprejemnik prejel okvir. Če je okvir poslan z aktivno ACK zastavico
in potrditev s strani prejemnika ni bila poslana v nekem časovno omejenem obdobju, bo
oddajnik ponovno nekajkrat poizkusil oddati okvir, preden bo javil napako v prenosu. Na
tem mestu je pomembno opomniti, da sprejem potrditve pomeni, da je MAC plast pravilno
sprejela okvir. Vendar to ne pomeni, da je bil okvir tudi pravilno obdelan (procesiran).
Mogoče je, da je MAC plast v vozlišču, ki sprejema, sprejel potrditev okvirja pravilno,
vendar je bil zaradi pomanjkanja procesne moči okvir zavržen v višjih plasteh. Kot rezultat
prejšnje ugotovitve višje plasti aplikacije lahko zahtevajo dodaten odgovor na potrditev.
5.5 Tipi naprav v MiWi omrežju
Protokol IEEE 802.15.4 definira naprave, ki temeljijo na funkcionalnosti. V osnovi imamo
dve vrsti naprav, prikazani v Tabela 2.
Tip naprave Ponujani servisi Napajanje Konfiguracija
sprejemnika v mirovanju
FFD Vsi ali večina Glavno napajanje Vključen
RFD Omejen nabor Baterijsko napajanje Izključen
Tabela 2: Naprave, definirane v IEEE 802.15.4 protokolu
MiWi protokol definira tri tipe naprav, prikazane v Tabela 3, ki temeljijo na njihovih
funkcijah v omrežju. Te naprave so:
PAN koordinator (ang. PAN coordinator),
koordinator (ang. Coordinator),
končna naprava (ang. End device).
Brezžično senzorsko omrežje MiWi
26
Tip naprave Tip naprave po IEEE Funkcija naprave
PAN koordinator FFD
Eden v omrežju. Oblikuje omrežje, dodeljuje
omrežne naslove, shranjuje tabele
povezovanja.
Koordinator FFD
V omrežju. Po potrebi. Povečuje fizično velikost
omrežja. Lahko celo opravlja nadzorno ali
kontrolno funkcijo.
Končna naprava FFD ali RFD Opravlja nadzorno ali kontrolno funkcijo.
Tabela 3: Naprave, definirane v MiWi protokolu
V zgornji Tabela 3 so prikazani tipi MiWi naprav in njihov odnos do IEEE naprav.
Funkcionalnost MiWi brezžične omrežne protokolne plasti nam pomaga določiti tip IEEE
funkcionalnosti, ki jo naprava zahteva.
5.6 Topologija naprav v MiWi protokolu
Glede na definirane naprave v poglavju Pregled MiWi protokola je najbolj pogosto
uporabljena naprava tipa PAN koordinator. To je naprava, ki začne graditi omrežje, določi
kanal za komunikacijo in določi PAN ID omrežja. Vse ostale naprave, ki se hočejo
pridružiti PAN-u, se morajo ravnati po navodilih PAN koordinatorja, če se hočejo povezati
v omrežje. Poznamo tri tipe topologij v omrežnem protokolu MiWi:
zvezdna omrežna topologija,
grozdna omrežna topologija,
mešana omrežna topologija.
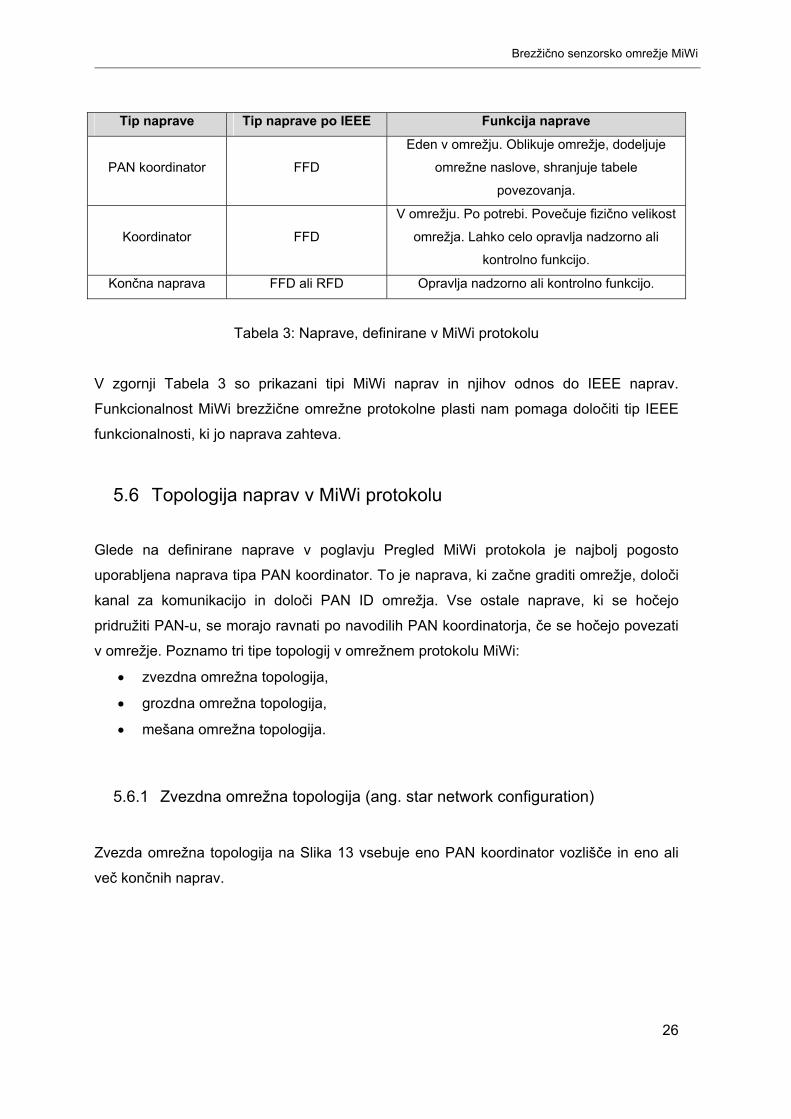
5.6.1 Zvezdna omrežna topologija (ang. star network configuration)
Zvezda omrežna topologija na Slika 13 vsebuje eno PAN koordinator vozlišče in eno ali
več končnih naprav.
Brezžično senzorsko omrežje MiWi
27
Slika 13: Zvezdna omrežna topologija
V tej omrežni topologiji vse končne naprave komunicirajo le s PAN koordinatorjem. Če
hoče neka končna naprava poslati podatek drugi končni napravi, ga lahko pošlje samo
preko PAN koordinatorja, ki ta podatek usmeri od končne naprave, ki je poslala podatek, h
končni napravi, ki bo sprejela ta podatek.
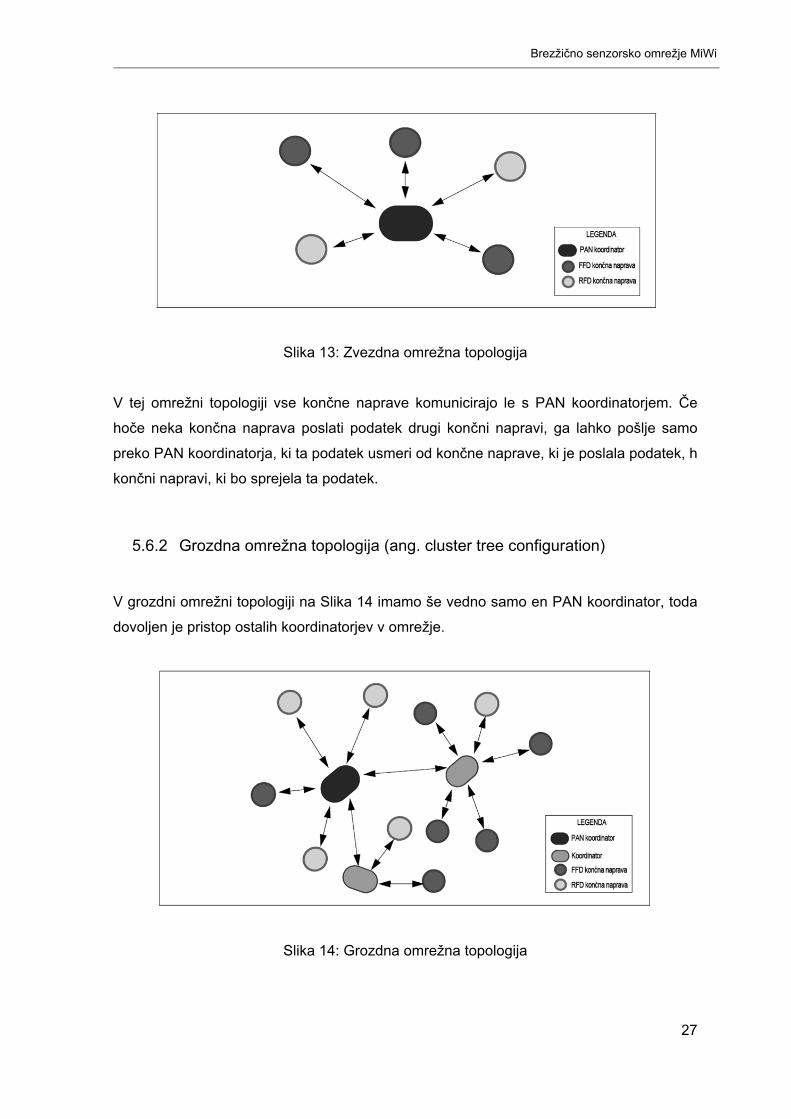
5.6.2 Grozdna omrežna topologija (ang. cluster tree configuration)
V grozdni omrežni topologiji na Slika 14 imamo še vedno samo en PAN koordinator, toda
dovoljen je pristop ostalih koordinatorjev v omrežje.
Slika 14: Grozdna omrežna topologija
Brezžično senzorsko omrežje MiWi
28
Ta oblika definira strukturo v obliki drevesa, kjer je PAN koordinator koren drevesa, ostali
koordinatorji so veje drevesa, končne naprave pa so listi drevesa. V tej konfiguraciji
morajo vsa sporočila biti poslana skozi omrežje glede na pot, ki jo določa drevesna
struktura. Grozdno omrežno topologijo imenujemo tudi multihop omrežje (to je omrežje z
večjim številom skokov), ker so sporočila usmerjena preko več kot enega vozlišča, da
dosežejo cilj.
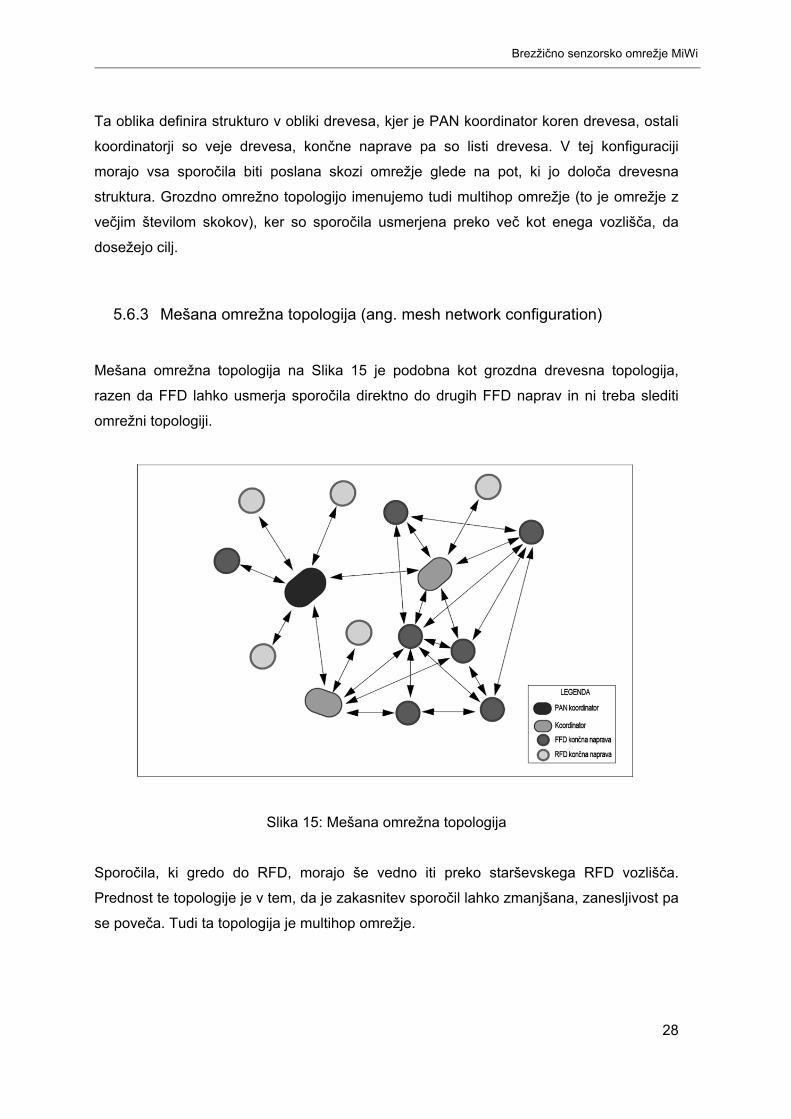
5.6.3 Mešana omrežna topologija (ang. mesh network configuration)
Mešana omrežna topologija na Slika 15 je podobna kot grozdna drevesna topologija,
razen da FFD lahko usmerja sporočila direktno do drugih FFD naprav in ni treba slediti
omrežni topologiji.
Slika 15: Mešana omrežna topologija
Sporočila, ki gredo do RFD, morajo še vedno iti preko starševskega RFD vozlišča.
Prednost te topologije je v tem, da je zakasnitev sporočil lahko zmanjšana, zanesljivost pa
se poveča. Tudi ta topologija je multihop omrežje.
Brezžično senzorsko omrežje MiWi
29
5.7 Večdostopovno omrežje (ang. multi-acess network)
V IEEE 802.15.4 omrežju pomeni večdostopovno omrežje to, da imajo vsa vozlišča v
omrežju enak dostop do medija, preko katerega komunicirajo. Poznamo dva tipa
mehanizma za dostop do medija v večdostopovnem omrežju. To sta:
beacon mehanizem dostopa do medija,
non-beacon mehanizem dostopa do medija.
V »ang. beacon« mehanizmu za dostop do omrežja je vozliščem dovoljeno oddajati samo
v vnaprej definiranih časovnih režah. PAN koordinator periodično pošlje super okvir (ang.
superframe), ki je prepoznan kot beacon okvir, in vsa vozlišča v omrežju se sinhronizirajo
na ta okvir. Vsakemu vozlišču je dodeljena specifična časovna reža v superokvirju, v
kateri lahko sprejema in oddaja podatke. Superokvir lahko vsebuje tudi skupno časovno
režo, v kateri vsa vozlišča med seboj tekmujejo za dostop do kanala (komunikacijskega
medija).
V »ang. non-beacon« mehanizmu za dostop do omrežja je vsem vozliščem v omrežju
dovoljeno oddajati kadarkoli, ko je kanal aktiven. Microchipova verzija MiWi protokola
podpira samo non-beacon mehanizem za dostop do omrežja.
5.8 Naloge naslavljanja v MiWi protokolu
MiWi protokol uporablja naslavljanje iz protokola IEEE 802.15.4. V specifikaciji so podani
trije tipi naslavljanja.
Razširjen organiziran unikaten identifikator (EUI). To je 8-bitno število, ki je globalno
gledano unikatno. Vsaka naprava, ki uporablja specifikacijo IEEE 802.15.4, vsebuje
unikaten EUI naslov. Zgornji trije biti naslova EUI so zakupljeni od IEEE. Spodnjih pet
bitov naslova EUI pa je na razpolago uporabniku, dokler so globalno gledano unikatni.
PAN identifikator (PANID). To je 16-bitni naslov, ki definira skupino vozlišč. Vsa vozlišča
v PAN-u si delijo skupen PANID. Naprava prevzame PANID omrežja takrat, ko je izbrana,
da se pridruži PAN-u.
Kratki naslov (ang. short address). Drugače ga imenujemo tudi naslov naprave. To je
16-bitni (2-zložni) naslov, ki je dodeljen napravi od njenega starša. Ta kratki naslov je
Brezžično senzorsko omrežje MiWi
30
unikaten v PAN-u in se uporablja za naslavljanje ter pošiljanje sporočil po omrežju. IEEE
standard določa, da ima PAN koordinator vedno naslov 0000h. Dodelitev naslova je sedaj
v domeni PAN koordinatorja.
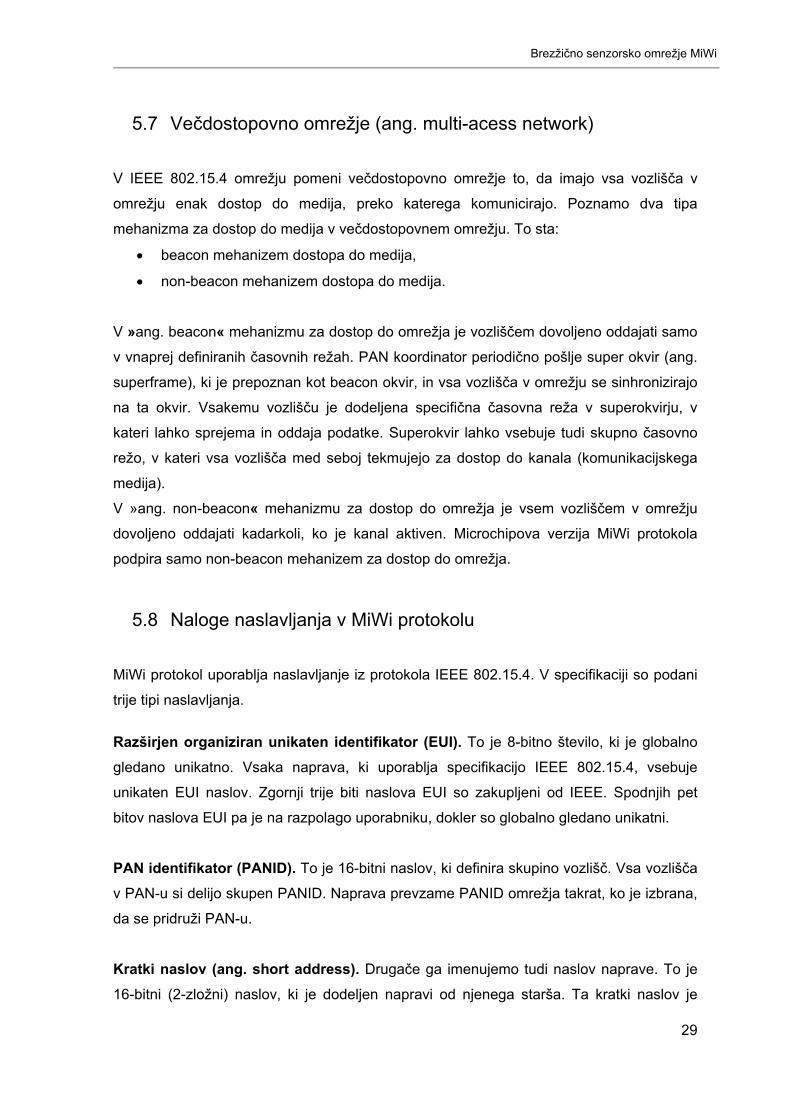
Slika 16: Struktura kratkega naslova v MiWi protokolu
MiWi protokol uporablja 16 bitov v kratkem naslovu, da pomaga usmerjati in izmenjevati
informacije o vozliščih. Polje bitov in naslov so vidni na Slika 16. Starševsko polje številk
(ang. parents bit number, biti 10−8) je unikatno za vsak koordinator v omrežju, vključno s
PAN koordinatorjem. Ker je starševsko polje velikosti 3 bitov, je to omejitev za število
koordinatorjev v omrežju. Lahko imamo največ 8 koordinatorjev. Otroško polje številk
(ang. childrens number, biti 6−0) od kateregakoli koordinatorja v omrežju je enako 00h. To
kaže na dejstvo, da delujejo kot koordinator. Ostale vrednosti za to polje so določene
glede na tip naprave (FFD ali RFD naprava) kakor tudi njegova funkcija v PAN-u.
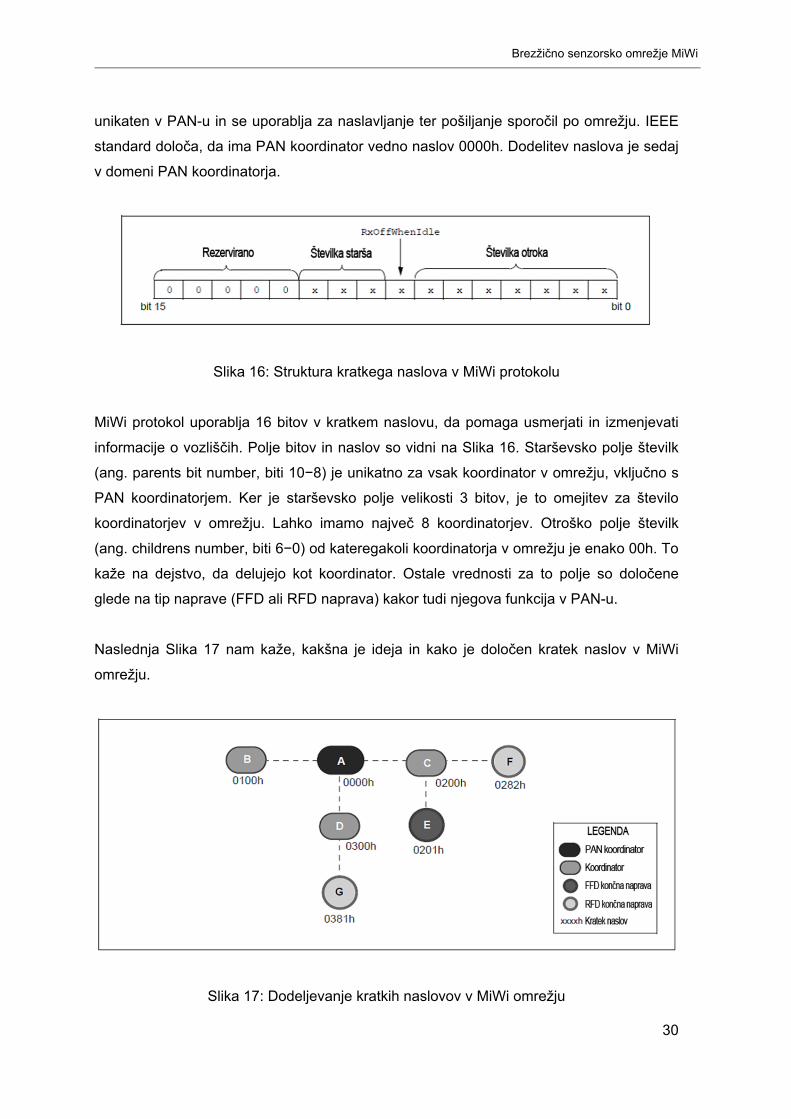
Naslednja Slika 17 nam kaže, kakšna je ideja in kako je določen kratek naslov v MiWi
omrežju.
Slika 17: Dodeljevanje kratkih naslovov v MiWi omrežju
Brezžično senzorsko omrežje MiWi
31
Bit 7, na Slika 16, je polje RxOffWhenIdle, ki je nasprotno definirano kot RxOnWhenIdle
v IEEE 802.15.4. Ko je ta bit nastavljen, pomeni, da bo naprava izklopila radijski del, ko je
v stanju Idle in je nesposobna sprejemati pakete. Vsaka druga naprava, različna od starša
te naprave, lahko usmerja vsak paket, ki ima ta bit nastavljen na starša naprave. Cilj
starša naprave je shraniti paket za otroka, dokler se le-ta ne zbudi in zahteva ta paket. Če
ta bit ni nastavljen v naslovu naprave, je ta naprava vedno sposobna sprejemati pakete.
Biti 15 do 11 so v tej implementaciji vedno na vrednosti 0.
5.9 Pošiljanje sporočil v MiWi protokolu
Ko je omrežje vzpostavljeno, je naslednja pomembna stvar, kako poslati sporočilo po
omrežju. Vsaka naprava, ki je član MiWi omrežja, bo uporabila svoj kratek naslov za
komunikacijo preko omrežja. Ta kratek naslov pomaga drugim napravam v omrežju
določiti lokacijo vozlišča in kako priti do te naprave.
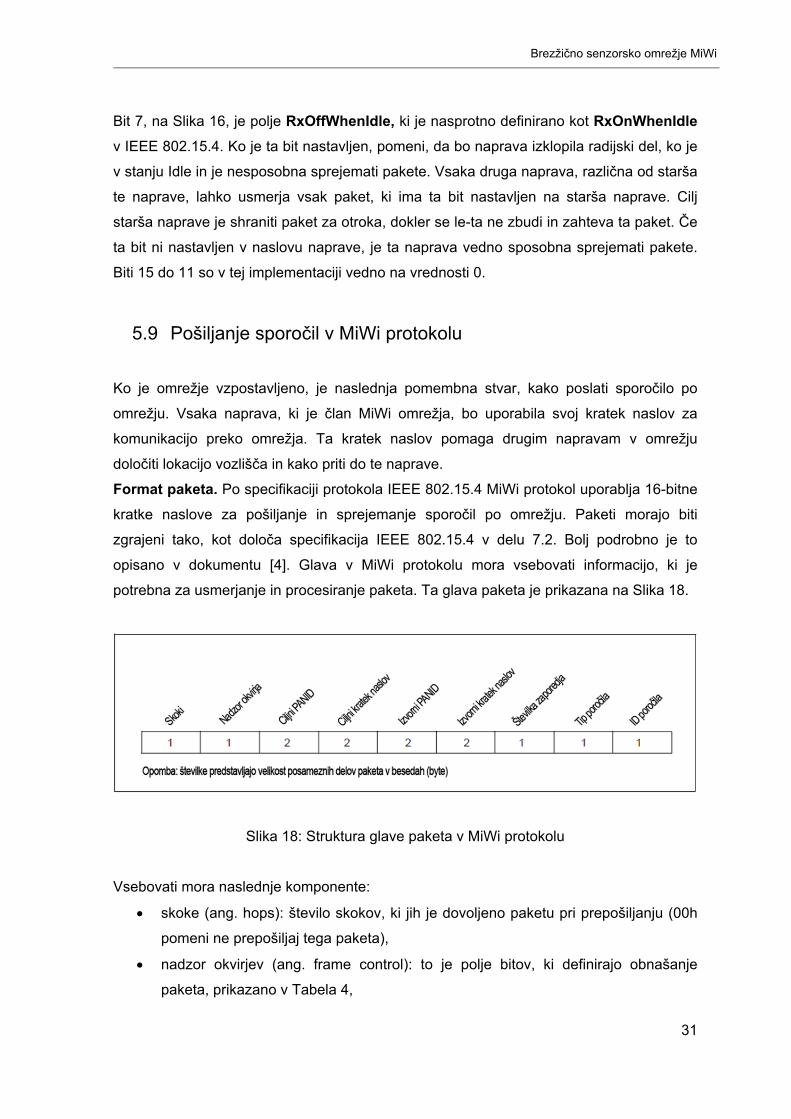
Format paketa. Po specifikaciji protokola IEEE 802.15.4 MiWi protokol uporablja 16-bitne
kratke naslove za pošiljanje in sprejemanje sporočil po omrežju. Paketi morajo biti
zgrajeni tako, kot določa specifikacija IEEE 802.15.4 v delu 7.2. Bolj podrobno je to
opisano v dokumentu [4]. Glava v MiWi protokolu mora vsebovati informacijo, ki je
potrebna za usmerjanje in procesiranje paketa. Ta glava paketa je prikazana na Slika 18.
Slika 18: Struktura glave paketa v MiWi protokolu
Vsebovati mora naslednje komponente:
skoke (ang. hops): število skokov, ki jih je dovoljeno paketu pri prepošiljanju (00h
pomeni ne prepošiljaj tega paketa),
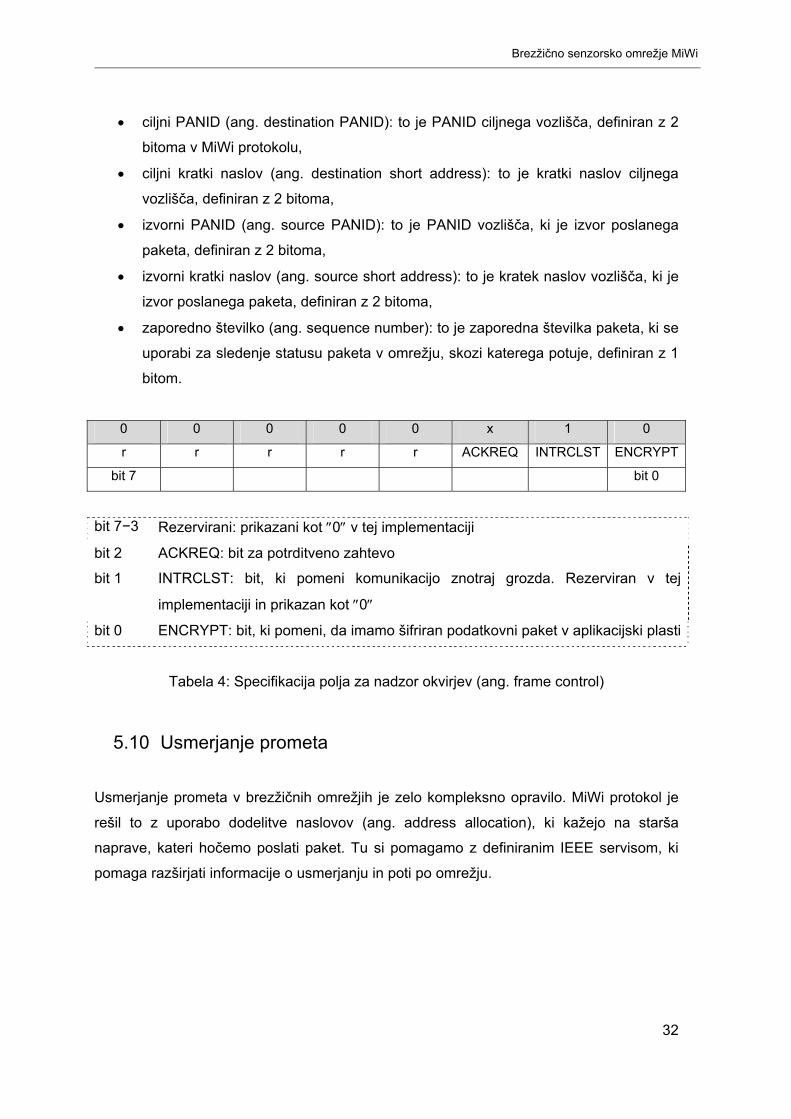
nadzor okvirjev (ang. frame control): to je polje bitov, ki definirajo obnašanje
paketa, prikazano v Tabela 4,
Brezžično senzorsko omrežje MiWi
32
ciljni PANID (ang. destination PANID): to je PANID ciljnega vozlišča, definiran z 2
bitoma v MiWi protokolu,
ciljni kratki naslov (ang. destination short address): to je kratki naslov ciljnega
vozlišča, definiran z 2 bitoma,
izvorni PANID (ang. source PANID): to je PANID vozlišča, ki je izvor poslanega
paketa, definiran z 2 bitoma,
izvorni kratki naslov (ang. source short address): to je kratek naslov vozlišča, ki je
izvor poslanega paketa, definiran z 2 bitoma,
zaporedno številko (ang. sequence number): to je zaporedna številka paketa, ki se
uporabi za sledenje statusu paketa v omrežju, skozi katerega potuje, definiran z 1
bitom.
0 0 0 0 0 x 1 0
r r r r r ACKREQ INTRCLST ENCRYPT
bit 7 bit 0
bit 7−3 Rezervirani: prikazani kot 0 v tej implementaciji
bit 2 ACKREQ: bit za potrditveno zahtevo
bit 1 INTRCLST: bit, ki pomeni komunikacijo znotraj grozda. Rezerviran v tej
implementaciji in prikazan kot 0
bit 0 ENCRYPT: bit, ki pomeni, da imamo šifriran podatkovni paket v aplikacijski plasti
Tabela 4: Specifikacija polja za nadzor okvirjev (ang. frame control)
5.10 Usmerjanje prometa
Usmerjanje prometa v brezžičnih omrežjih je zelo kompleksno opravilo. MiWi protokol je
rešil to z uporabo dodelitve naslovov (ang. address allocation), ki kažejo na starša
naprave, kateri hočemo poslati paket. Tu si pomagamo z definiranim IEEE servisom, ki
pomaga razširjati informacije o usmerjanju in poti po omrežju.
Brezžično senzorsko omrežje MiWi
33
5.10.1 Učenje o sosednjih koordinatorjih
Ena od nalog usmerjevalnega algoritma je tudi določevanje naslednjega skoka za vse
odhajajoče pakete. MiWi protokol za redni omrežni promet in raziskovanje teh poti
uporablja IEEE mehanizem spajanja omrežja. Ko se katerakoli naprava hoče povezati v
omrežje, najprej pošlje beacon paket o zahtevi. Vsi koordinatorji, ki so slišali ta beacon
paket o zahtevi, pošljejo v omrežje informacijski beacon paket, ki vsebuje informacije o
sosednjih napravah v njihovem omrežju. V MiWi protokolu so 3 zlogi (ang. byte) dodatne
informacije pripeti k podatkovni vsebini (ang. payload) beacon okvirja in pomagajo pri
usmerjanju prometa. Ti trije dodatni zlogi so:
ID protokola (Protocol ID): ta zlog (ang. byte) pomaga pri razlikovanju MiWi
protokola od ostalih protokolov v IEEE 802.15.4, ki lahko delujejo na istem
radijskem področju. Vrednost ID protokola mora biti vedno 4Dh,
številka verzije (ang. version number): to je verzija specifikacije protokola,
lokalni koordinatorji (ang. local coordinators): To polje je bitna mapa (ang. bitmap),
ki kaže kateri koordinatorji so trenutno vidni s strani koordinatorja, ki pošilja
beacon okvir. Vsak bit v zlogu predstavlja enega od 8 možnih koordinatorjev. Bit 0
pomeni 0000h (to je vrednost PAN koordinatorja), bit 1 pomeni, da ta koordinator
lahko direktno komunicira z 0100h koordinatorjem. V polju lokalnih koordinatorjev,
v beacon podatkovnem polju (ang. payload) se vsi koordinatorji v omrežju učijo o
vseh možnih poteh po omrežju, brez da pošljejo enkratno unikatno zahtevo po
povezavi,
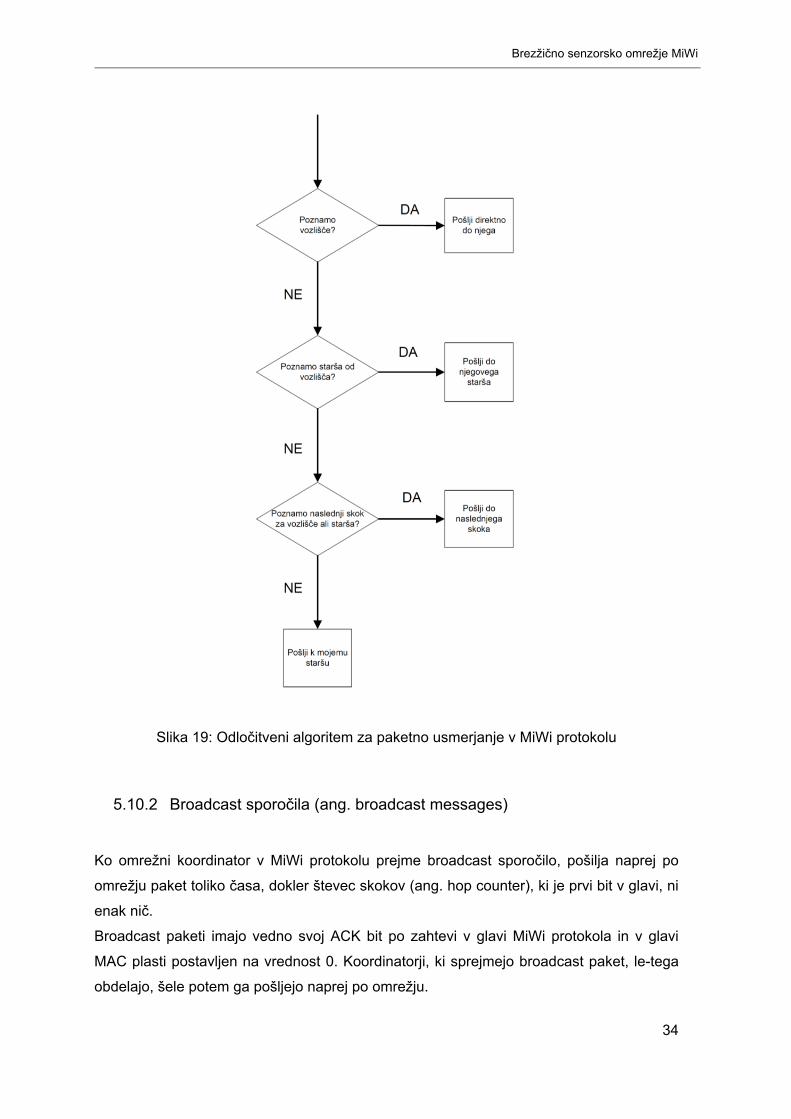
usmerjanje do drugih naprav (ang. routing to other devices): usmerjanje v omrežju
MiWi protokola postane enostavno takrat, ko imamo znanje o sosednjih
koordinatorjih in kaj ti sosednji koordinatorji lahko vidijo. Pošiljanje paketa do
naslednjega vozlišča sledi logiki (algoritmu), ki je prikazana na Slika 19.
Brezžično senzorsko omrežje MiWi
34
Slika 19: Odločitveni algoritem za paketno usmerjanje v MiWi protokolu
5.10.2 Broadcast sporočila (ang. broadcast messages)
Ko omrežni koordinator v MiWi protokolu prejme broadcast sporočilo, pošilja naprej po
omrežju paket toliko časa, dokler števec skokov (ang. hop counter), ki je prvi bit v glavi, ni
enak nič.
Broadcast paketi imajo vedno svoj ACK bit po zahtevi v glavi MiWi protokola in v glavi
MAC plasti postavljen na vrednost 0. Koordinatorji, ki sprejmejo broadcast paket, le-tega
obdelajo, šele potem ga pošljejo naprej po omrežju.
Brezžično senzorsko omrežje MiWi
35
5.10.3 Poročila v MiWi protokolu
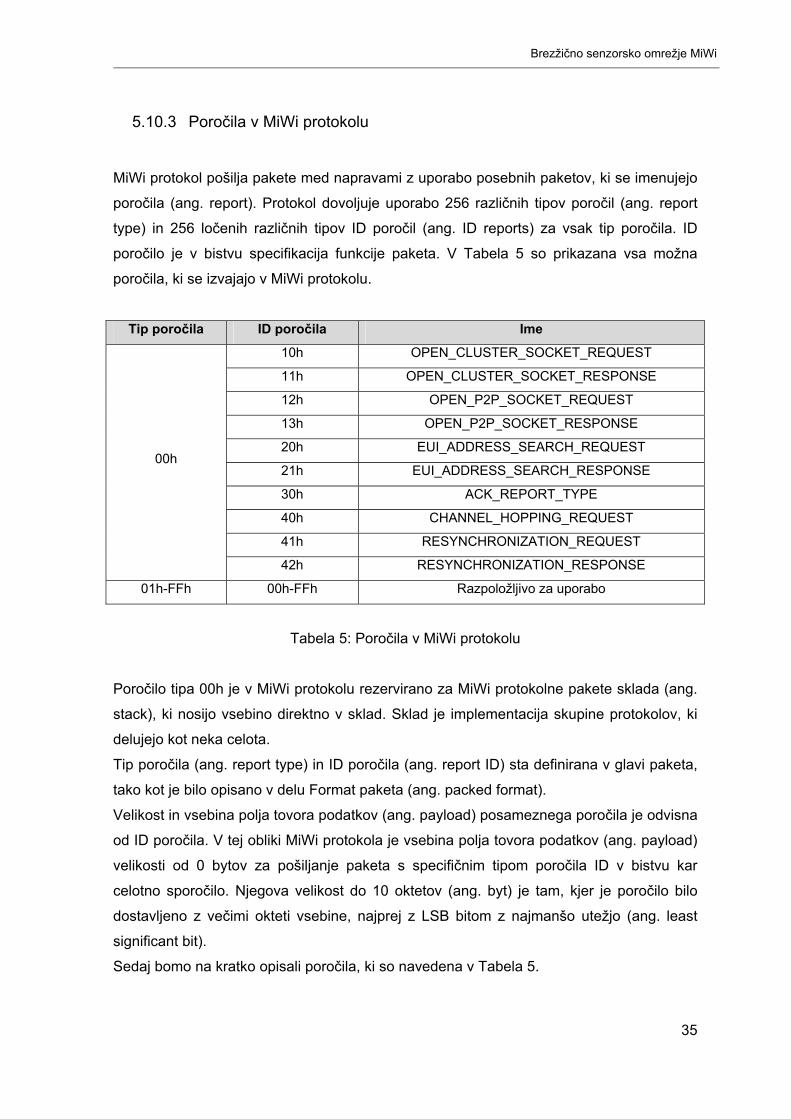
MiWi protokol pošilja pakete med napravami z uporabo posebnih paketov, ki se imenujejo
poročila (ang. report). Protokol dovoljuje uporabo 256 različnih tipov poročil (ang. report
type) in 256 ločenih različnih tipov ID poročil (ang. ID reports) za vsak tip poročila. ID
poročilo je v bistvu specifikacija funkcije paketa. V Tabela 5 so prikazana vsa možna
poročila, ki se izvajajo v MiWi protokolu.
Tip poročila ID poročila Ime
00h
10h OPEN_CLUSTER_SOCKET_REQUEST
11h OPEN_CLUSTER_SOCKET_RESPONSE
12h OPEN_P2P_SOCKET_REQUEST
13h OPEN_P2P_SOCKET_RESPONSE
20h EUI_ADDRESS_SEARCH_REQUEST
21h EUI_ADDRESS_SEARCH_RESPONSE
30h ACK_REPORT_TYPE
40h CHANNEL_HOPPING_REQUEST
41h RESYNCHRONIZATION_REQUEST
42h RESYNCHRONIZATION_RESPONSE
01h-FFh 00h-FFh Razpoložljivo za uporabo
Tabela 5: Poročila v MiWi protokolu
Poročilo tipa 00h je v MiWi protokolu rezervirano za MiWi protokolne pakete sklada (ang.
stack), ki nosijo vsebino direktno v sklad. Sklad je implementacija skupine protokolov, ki
delujejo kot neka celota.
Tip poročila (ang. report type) in ID poročila (ang. report ID) sta definirana v glavi paketa,
tako kot je bilo opisano v delu Format paketa (ang. packed format).
Velikost in vsebina polja tovora podatkov (ang. payload) posameznega poročila je odvisna
od ID poročila. V tej obliki MiWi protokola je vsebina polja tovora podatkov (ang. payload)
velikosti od 0 bytov za pošiljanje paketa s specifičnim tipom poročila ID v bistvu kar
celotno sporočilo. Njegova velikost do 10 oktetov (ang. byt) je tam, kjer je poročilo bilo
dostavljeno z večimi okteti vsebine, najprej z LSB bitom z najmanšo utežjo (ang. least
significant bit).
Sedaj bomo na kratko opisali poročila, ki so navedena v Tabela 5.
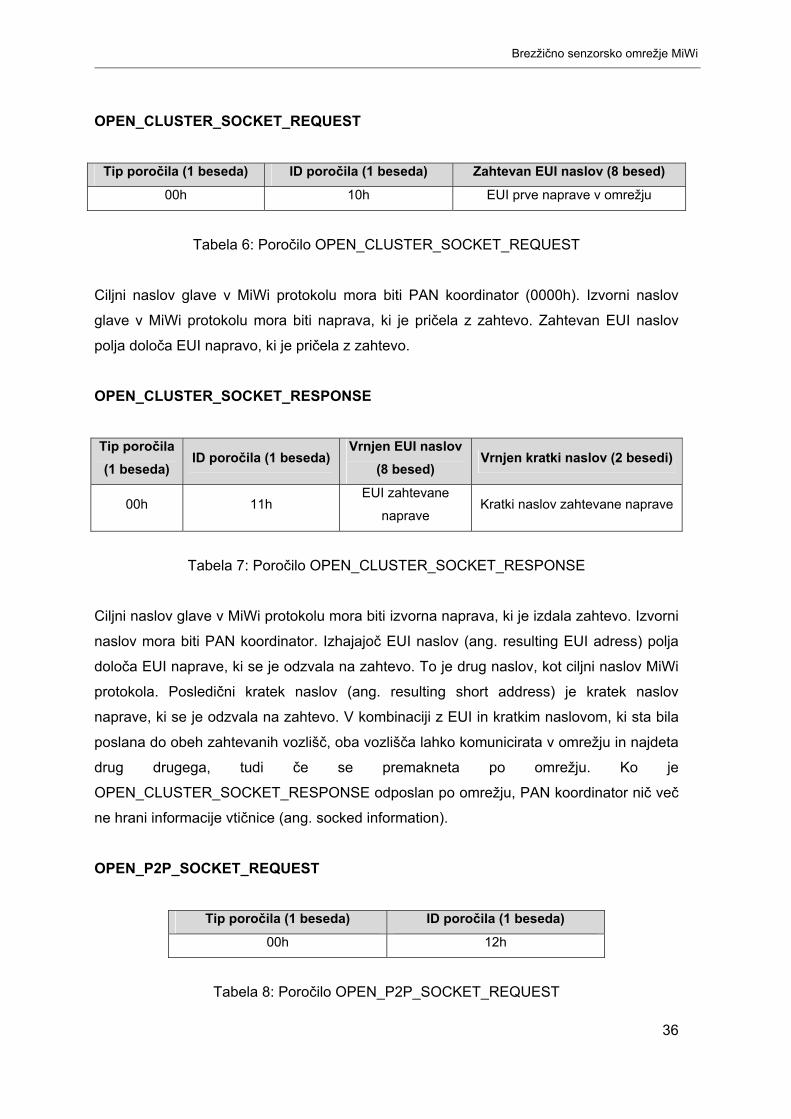
Brezžično senzorsko omrežje MiWi
36
OPEN_CLUSTER_SOCKET_REQUEST
Tip poročila (1 beseda) ID poročila (1 beseda) Zahtevan EUI naslov (8 besed)
00h 10h EUI prve naprave v omrežju
Tabela 6: Poročilo OPEN_CLUSTER_SOCKET_REQUEST
Ciljni naslov glave v MiWi protokolu mora biti PAN koordinator (0000h). Izvorni naslov
glave v MiWi protokolu mora biti naprava, ki je pričela z zahtevo. Zahtevan EUI naslov
polja določa EUI napravo, ki je pričela z zahtevo.
OPEN_CLUSTER_SOCKET_RESPONSE
Tip poročila
(1 beseda) ID poročila (1 beseda)
Vrnjen EUI naslov
(8 besed) Vrnjen kratki naslov (2 besedi)
00h 11h EUI zahtevane
naprave Kratki naslov zahtevane naprave
Tabela 7: Poročilo OPEN_CLUSTER_SOCKET_RESPONSE
Ciljni naslov glave v MiWi protokolu mora biti izvorna naprava, ki je izdala zahtevo. Izvorni
naslov mora biti PAN koordinator. Izhajajoč EUI naslov (ang. resulting EUI adress) polja
določa EUI naprave, ki se je odzvala na zahtevo. To je drug naslov, kot ciljni naslov MiWi
protokola. Posledični kratek naslov (ang. resulting short address) je kratek naslov
naprave, ki se je odzvala na zahtevo. V kombinaciji z EUI in kratkim naslovom, ki sta bila
poslana do obeh zahtevanih vozlišč, oba vozlišča lahko komunicirata v omrežju in najdeta
drug drugega, tudi če se premakneta po omrežju. Ko je
OPEN_CLUSTER_SOCKET_RESPONSE odposlan po omrežju, PAN koordinator nič več
ne hrani informacije vtičnice (ang. socked information).
OPEN_P2P_SOCKET_REQUEST
Tip poročila (1 beseda) ID poročila (1 beseda)
00h 12h
Tabela 8: Poročilo OPEN_P2P_SOCKET_REQUEST
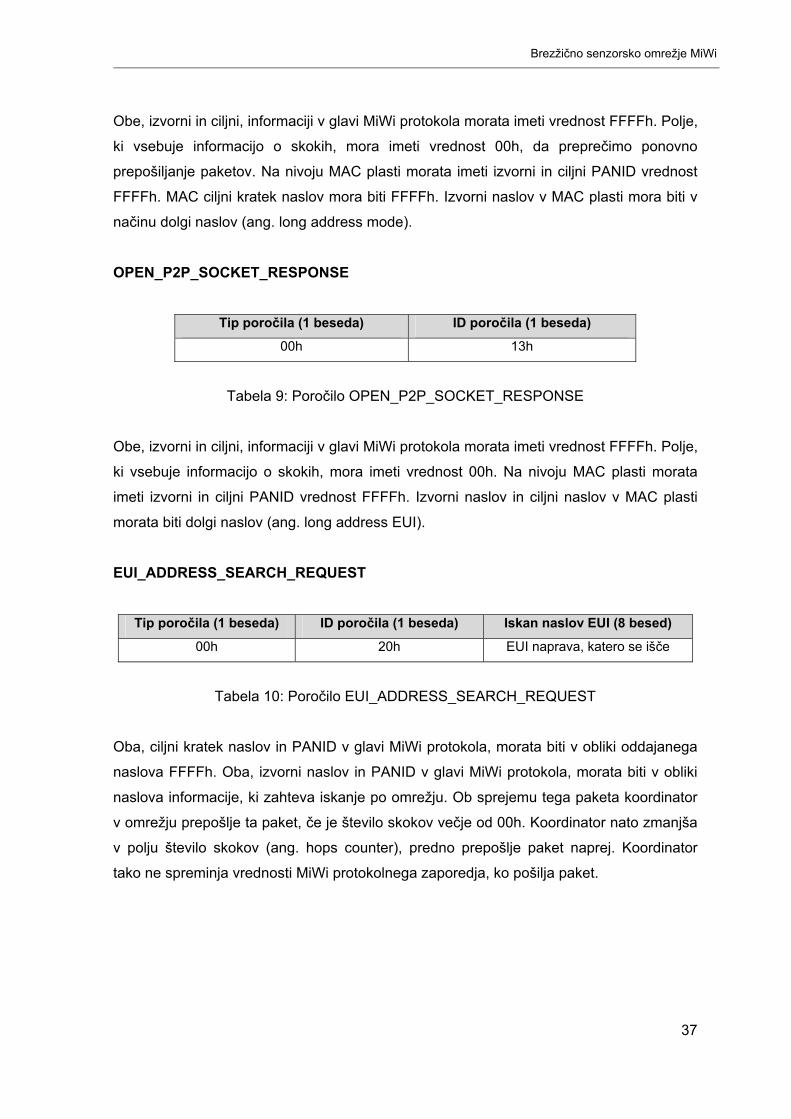
Brezžično senzorsko omrežje MiWi
37
Obe, izvorni in ciljni, informaciji v glavi MiWi protokola morata imeti vrednost FFFFh. Polje,
ki vsebuje informacijo o skokih, mora imeti vrednost 00h, da preprečimo ponovno
prepošiljanje paketov. Na nivoju MAC plasti morata imeti izvorni in ciljni PANID vrednost
FFFFh. MAC ciljni kratek naslov mora biti FFFFh. Izvorni naslov v MAC plasti mora biti v
načinu dolgi naslov (ang. long address mode).
OPEN_P2P_SOCKET_RESPONSE
Tip poročila (1 beseda) ID poročila (1 beseda)
00h 13h
Tabela 9: Poročilo OPEN_P2P_SOCKET_RESPONSE
Obe, izvorni in ciljni, informaciji v glavi MiWi protokola morata imeti vrednost FFFFh. Polje,
ki vsebuje informacijo o skokih, mora imeti vrednost 00h. Na nivoju MAC plasti morata
imeti izvorni in ciljni PANID vrednost FFFFh. Izvorni naslov in ciljni naslov v MAC plasti
morata biti dolgi naslov (ang. long address EUI).
EUI_ADDRESS_SEARCH_REQUEST
Tip poročila (1 beseda) ID poročila (1 beseda) Iskan naslov EUI (8 besed)
00h 20h EUI naprava, katero se išče
Tabela 10: Poročilo EUI_ADDRESS_SEARCH_REQUEST
Oba, ciljni kratek naslov in PANID v glavi MiWi protokola, morata biti v obliki oddajanega
naslova FFFFh. Oba, izvorni naslov in PANID v glavi MiWi protokola, morata biti v obliki
naslova informacije, ki zahteva iskanje po omrežju. Ob sprejemu tega paketa koordinator
v omrežju prepošlje ta paket, če je število skokov večje od 00h. Koordinator nato zmanjša
v polju število skokov (ang. hops counter), predno prepošlje paket naprej. Koordinator
tako ne spreminja vrednosti MiWi protokolnega zaporedja, ko pošilja paket.
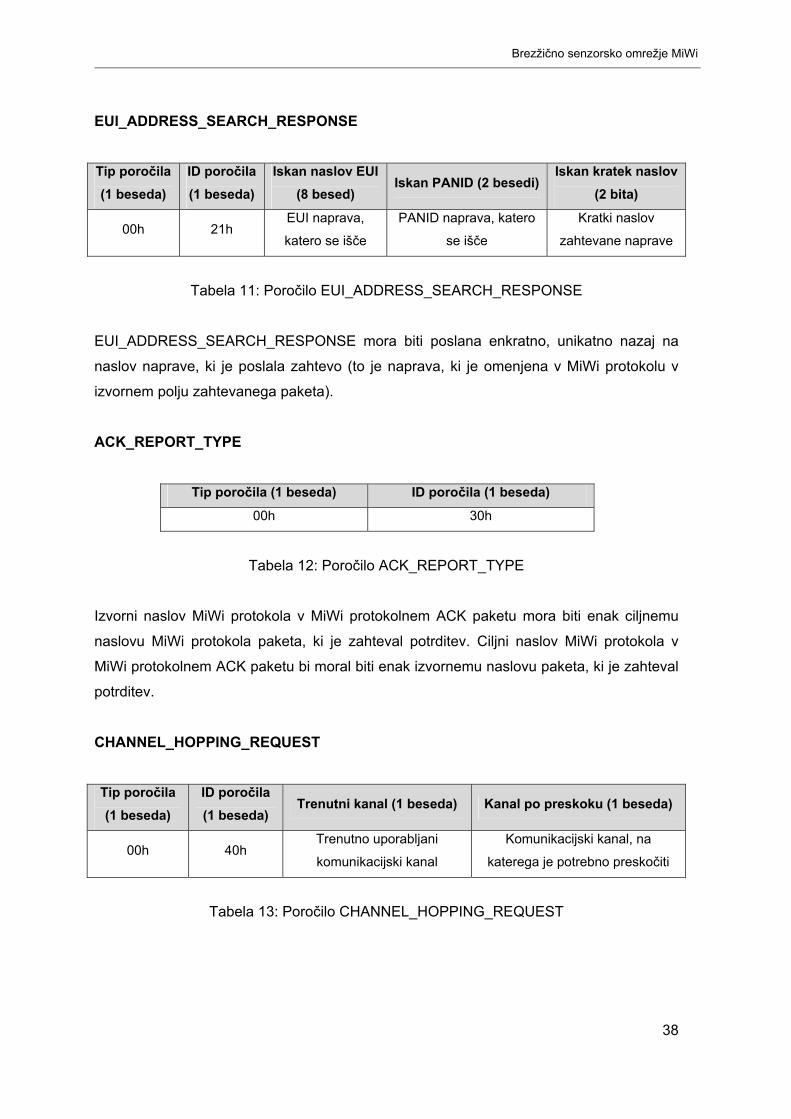
Brezžično senzorsko omrežje MiWi
38
EUI_ADDRESS_SEARCH_RESPONSE
Tip poročila
(1 beseda)
ID poročila
(1 beseda)
Iskan naslov EUI
(8 besed) Iskan PANID (2 besedi)
Iskan kratek naslov
(2 bita)
00h 21h EUI naprava,
katero se išče
PANID naprava, katero
se išče
Kratki naslov
zahtevane naprave
Tabela 11: Poročilo EUI_ADDRESS_SEARCH_RESPONSE
EUI_ADDRESS_SEARCH_RESPONSE mora biti poslana enkratno, unikatno nazaj na
naslov naprave, ki je poslala zahtevo (to je naprava, ki je omenjena v MiWi protokolu v
izvornem polju zahtevanega paketa).
ACK_REPORT_TYPE
Tip poročila (1 beseda) ID poročila (1 beseda)
00h 30h
Tabela 12: Poročilo ACK_REPORT_TYPE
Izvorni naslov MiWi protokola v MiWi protokolnem ACK paketu mora biti enak ciljnemu
naslovu MiWi protokola paketa, ki je zahteval potrditev. Ciljni naslov MiWi protokola v
MiWi protokolnem ACK paketu bi moral biti enak izvornemu naslovu paketa, ki je zahteval
potrditev.
CHANNEL_HOPPING_REQUEST
Tip poročila
(1 beseda)
ID poročila
(1 beseda) Trenutni kanal (1 beseda) Kanal po preskoku (1 beseda)
00h 40h Trenutno uporabljani
komunikacijski kanal
Komunikacijski kanal, na
katerega je potrebno preskočiti
Tabela 13: Poročilo CHANNEL_HOPPING_REQUEST
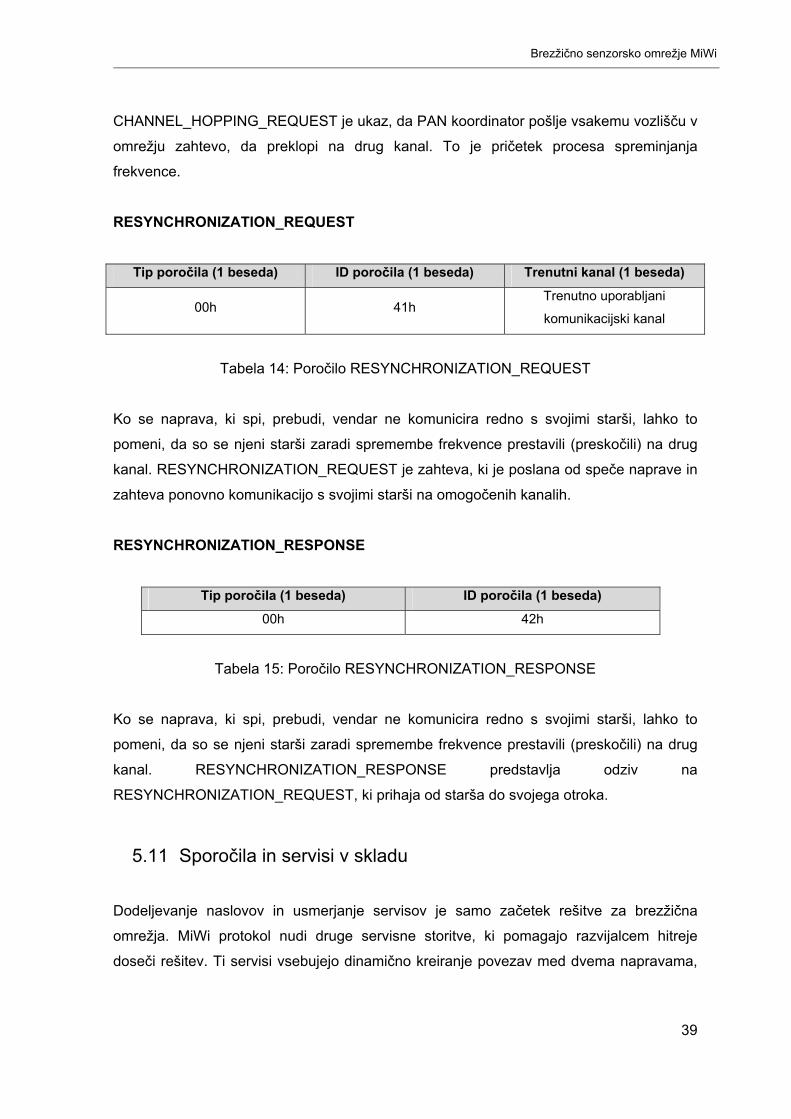
Brezžično senzorsko omrežje MiWi
39
CHANNEL_HOPPING_REQUEST je ukaz, da PAN koordinator pošlje vsakemu vozlišču v
omrežju zahtevo, da preklopi na drug kanal. To je pričetek procesa spreminjanja
frekvence.
RESYNCHRONIZATION_REQUEST
Tip poročila (1 beseda) ID poročila (1 beseda) Trenutni kanal (1 beseda)
00h 41h Trenutno uporabljani
komunikacijski kanal
Tabela 14: Poročilo RESYNCHRONIZATION_REQUEST
Ko se naprava, ki spi, prebudi, vendar ne komunicira redno s svojimi starši, lahko to
pomeni, da so se njeni starši zaradi spremembe frekvence prestavili (preskočili) na drug
kanal. RESYNCHRONIZATION_REQUEST je zahteva, ki je poslana od speče naprave in
zahteva ponovno komunikacijo s svojimi starši na omogočenih kanalih.
RESYNCHRONIZATION_RESPONSE
Tip poročila (1 beseda) ID poročila (1 beseda)
00h 42h
Tabela 15: Poročilo RESYNCHRONIZATION_RESPONSE
Ko se naprava, ki spi, prebudi, vendar ne komunicira redno s svojimi starši, lahko to
pomeni, da so se njeni starši zaradi spremembe frekvence prestavili (preskočili) na drug
kanal. RESYNCHRONIZATION_RESPONSE predstavlja odziv na
RESYNCHRONIZATION_REQUEST, ki prihaja od starša do svojega otroka.
5.11 Sporočila in servisi v skladu
Dodeljevanje naslovov in usmerjanje servisov je samo začetek rešitve za brezžična
omrežja. MiWi protokol nudi druge servisne storitve, ki pomagajo razvijalcem hitreje
doseči rešitev. Ti servisi vsebujejo dinamično kreiranje povezav med dvema napravama,
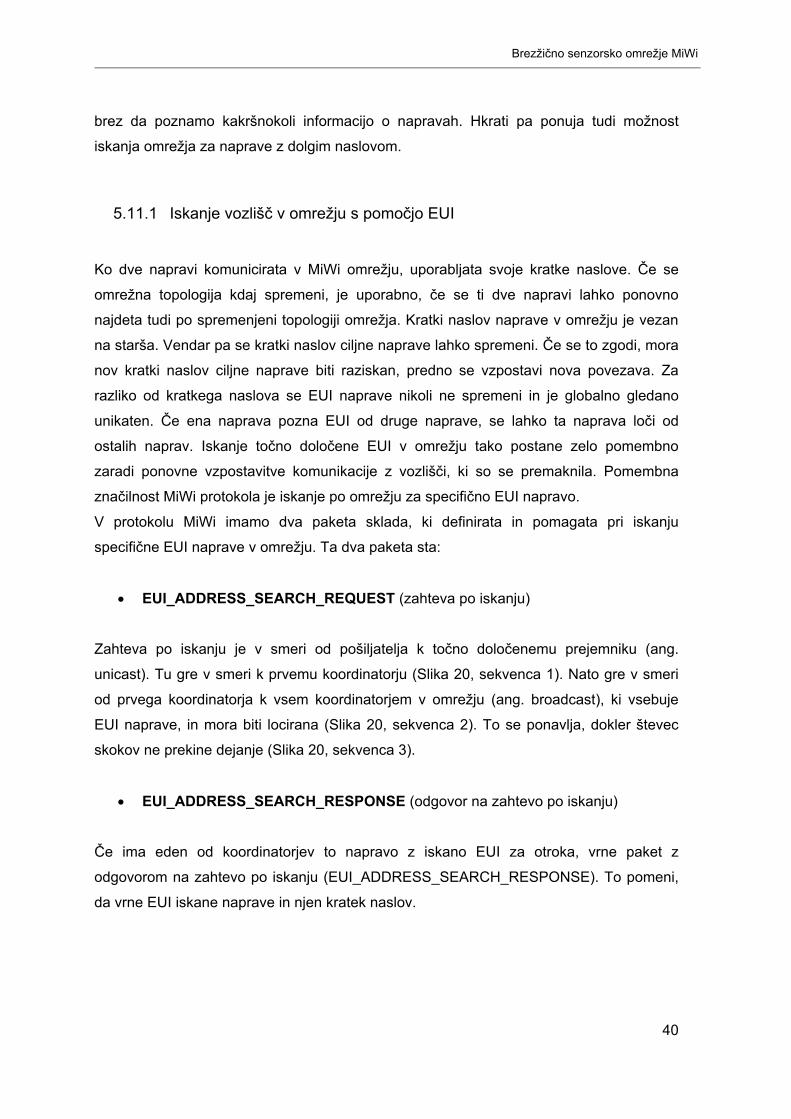
Brezžično senzorsko omrežje MiWi
40
brez da poznamo kakršnokoli informacijo o napravah. Hkrati pa ponuja tudi možnost
iskanja omrežja za naprave z dolgim naslovom.
5.11.1 Iskanje vozlišč v omrežju s pomočjo EUI
Ko dve napravi komunicirata v MiWi omrežju, uporabljata svoje kratke naslove. Če se
omrežna topologija kdaj spremeni, je uporabno, če se ti dve napravi lahko ponovno
najdeta tudi po spremenjeni topologiji omrežja. Kratki naslov naprave v omrežju je vezan
na starša. Vendar pa se kratki naslov ciljne naprave lahko spremeni. Če se to zgodi, mora
nov kratki naslov ciljne naprave biti raziskan, predno se vzpostavi nova povezava. Za
razliko od kratkega naslova se EUI naprave nikoli ne spremeni in je globalno gledano
unikaten. Če ena naprava pozna EUI od druge naprave, se lahko ta naprava loči od
ostalih naprav. Iskanje točno določene EUI v omrežju tako postane zelo pomembno
zaradi ponovne vzpostavitve komunikacije z vozlišči, ki so se premaknila. Pomembna
značilnost MiWi protokola je iskanje po omrežju za specifično EUI napravo.
V protokolu MiWi imamo dva paketa sklada, ki definirata in pomagata pri iskanju
specifične EUI naprave v omrežju. Ta dva paketa sta:
EUI_ADDRESS_SEARCH_REQUEST (zahteva po iskanju)
Zahteva po iskanju je v smeri od pošiljatelja k točno določenemu prejemniku (ang.
unicast). Tu gre v smeri k prvemu koordinatorju (Slika 20, sekvenca 1). Nato gre v smeri
od prvega koordinatorja k vsem koordinatorjem v omrežju (ang. broadcast), ki vsebuje
EUI naprave, in mora biti locirana (Slika 20, sekvenca 2). To se ponavlja, dokler števec
skokov ne prekine dejanje (Slika 20, sekvenca 3).
EUI_ADDRESS_SEARCH_RESPONSE (odgovor na zahtevo po iskanju)
Če ima eden od koordinatorjev to napravo z iskano EUI za otroka, vrne paket z
odgovorom na zahtevo po iskanju (EUI_ADDRESS_SEARCH_RESPONSE). To pomeni,
da vrne EUI iskane naprave in njen kratek naslov.
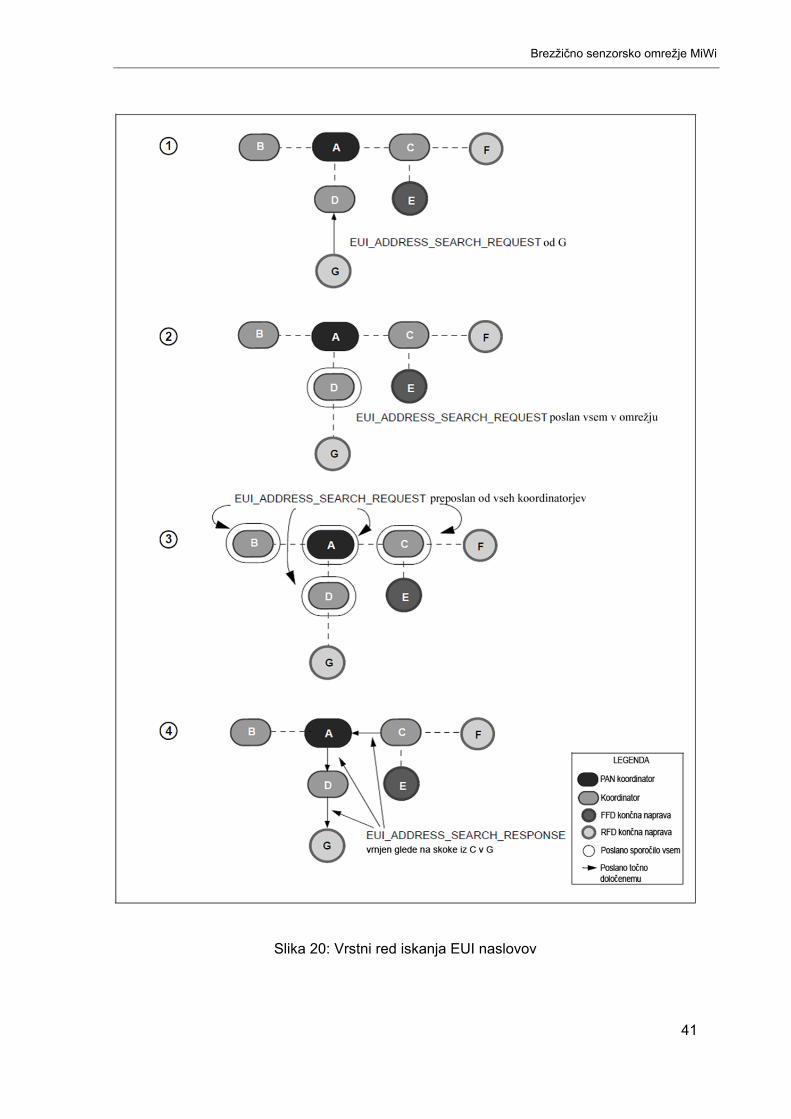
Brezžično senzorsko omrežje MiWi
41
Slika 20: Vrstni red iskanja EUI naslovov
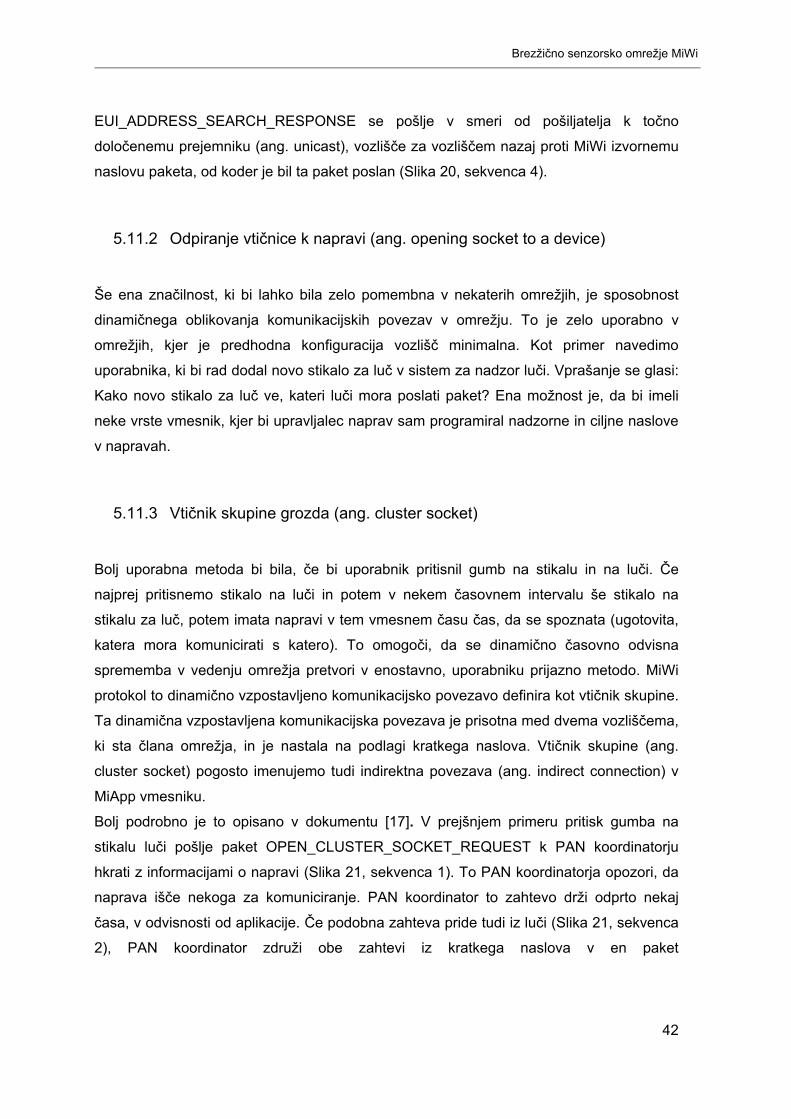
Brezžično senzorsko omrežje MiWi
42
EUI_ADDRESS_SEARCH_RESPONSE se pošlje v smeri od pošiljatelja k točno
določenemu prejemniku (ang. unicast), vozlišče za vozliščem nazaj proti MiWi izvornemu
naslovu paketa, od koder je bil ta paket poslan (Slika 20, sekvenca 4).
5.11.2 Odpiranje vtičnice k napravi (ang. opening socket to a device)
Še ena značilnost, ki bi lahko bila zelo pomembna v nekaterih omrežjih, je sposobnost
dinamičnega oblikovanja komunikacijskih povezav v omrežju. To je zelo uporabno v
omrežjih, kjer je predhodna konfiguracija vozlišč minimalna. Kot primer navedimo
uporabnika, ki bi rad dodal novo stikalo za luč v sistem za nadzor luči. Vprašanje se glasi:
Kako novo stikalo za luč ve, kateri luči mora poslati paket? Ena možnost je, da bi imeli
neke vrste vmesnik, kjer bi upravljalec naprav sam programiral nadzorne in ciljne naslove
v napravah.
5.11.3 Vtičnik skupine grozda (ang. cluster socket)
Bolj uporabna metoda bi bila, če bi uporabnik pritisnil gumb na stikalu in na luči. Če
najprej pritisnemo stikalo na luči in potem v nekem časovnem intervalu še stikalo na
stikalu za luč, potem imata napravi v tem vmesnem času čas, da se spoznata (ugotovita,
katera mora komunicirati s katero). To omogoči, da se dinamično časovno odvisna
sprememba v vedenju omrežja pretvori v enostavno, uporabniku prijazno metodo. MiWi
protokol to dinamično vzpostavljeno komunikacijsko povezavo definira kot vtičnik skupine.
Ta dinamična vzpostavljena komunikacijska povezava je prisotna med dvema vozliščema,
ki sta člana omrežja, in je nastala na podlagi kratkega naslova. Vtičnik skupine (ang.
cluster socket) pogosto imenujemo tudi indirektna povezava (ang. indirect connection) v
MiApp vmesniku.
Bolj podrobno je to opisano v dokumentu [17]. V prejšnjem primeru pritisk gumba na
stikalu luči pošlje paket OPEN_CLUSTER_SOCKET_REQUEST k PAN koordinatorju
hkrati z informacijami o napravi (Slika 21, sekvenca 1). To PAN koordinatorja opozori, da
naprava išče nekoga za komuniciranje. PAN koordinator to zahtevo drži odprto nekaj
časa, v odvisnosti od aplikacije. Če podobna zahteva pride tudi iz luči (Slika 21, sekvenca
2), PAN koordinator združi obe zahtevi iz kratkega naslova v en paket
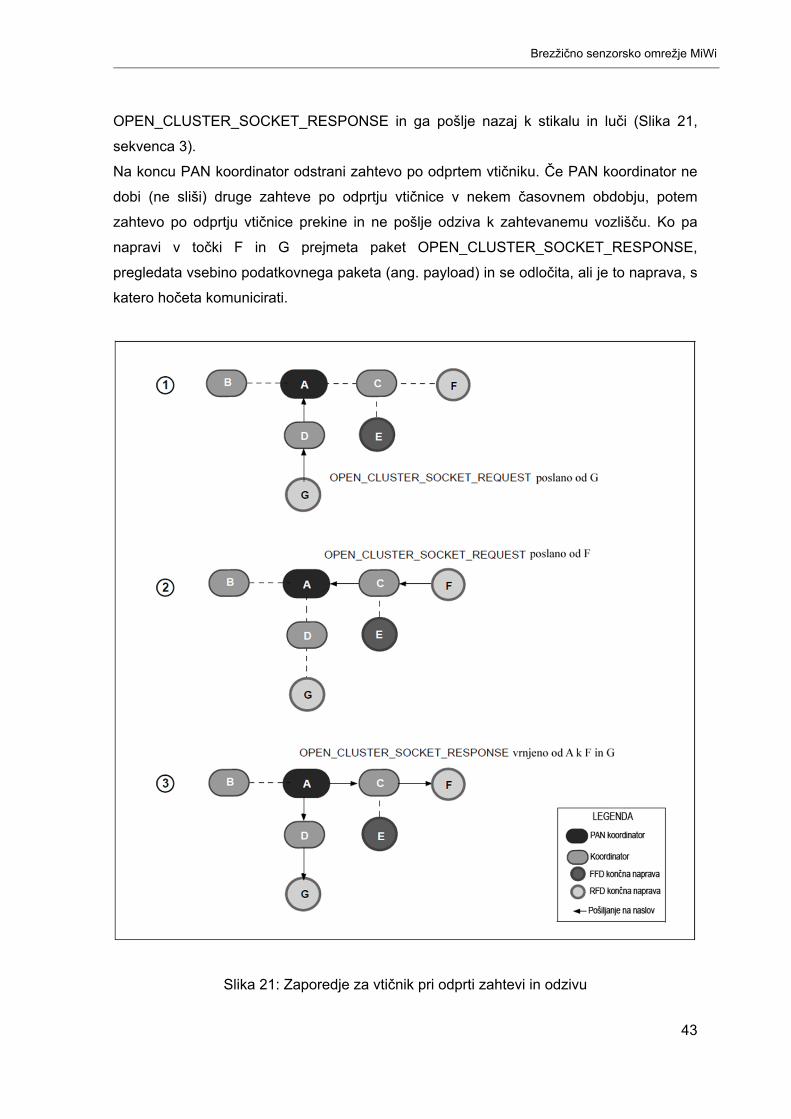
Brezžično senzorsko omrežje MiWi
43
OPEN_CLUSTER_SOCKET_RESPONSE in ga pošlje nazaj k stikalu in luči (Slika 21,
sekvenca 3).
Na koncu PAN koordinator odstrani zahtevo po odprtem vtičniku. Če PAN koordinator ne
dobi (ne sliši) druge zahteve po odprtju vtičnice v nekem časovnem obdobju, potem
zahtevo po odprtju vtičnice prekine in ne pošlje odziva k zahtevanemu vozlišču. Ko pa
napravi v točki F in G prejmeta paket OPEN_CLUSTER_SOCKET_RESPONSE,
pregledata vsebino podatkovnega paketa (ang. payload) in se odločita, ali je to naprava, s
katero hočeta komunicirati.
Slika 21: Zaporedje za vtičnik pri odprti zahtevi in odzivu
Brezžično senzorsko omrežje MiWi
44
To je odločitev, ki je sprejeta v aplikacijski plasti (ang. application layer decision) in ni
ponujena s strani plasti (ang. stack).
5.12 Upoštevanje uporabnika
Imamo lahko mnogo različnih situacij, ki se lahko zgodijo v omrežju, in niso same po sebi
obdelane v plasti (ang. stack). Vsaka od teh situacij mora biti pretehtana. Nekatere od teh
situacij morajo biti implementirane. Ostale so lahko implementirane, če sistem to zahteva.
5.12.1 Kateremu omrežju se pridružiti?
Značilnost omrežnega iskanja, vgrajenega v MiWi protokol, je, da protokol sam poišče
razpoložljive kanale v omrežju. Če jih ne najde, se sam odloči, kateremu omrežju se
pridruži. Ta odločitev je prepuščena aplikaciji. Nekatere aplikacije hočejo delati z enim
omrežjem preko drugega omrežja oziroma nekateri koordinatorji hočejo komunicirati
preko drugega koordinatorja v istem omrežju. Ko je preiskovanje omrežja zaključeno,
vsaka naprava šele tedaj dobi potrebo po iskanju glede na nek seznam in se odloči,
kateremu koordinatorju se bo pridružila.
5.12.2 Okrevanje iz napak
Okrevanje iz napak je zanimivo vprašanje v brezžičnih omrežjih. Nekateri razvijalci
zahtevajo od omrežij, da se dinamično ozdravijo, ko se pojavi napaka v delu omrežja.
Nekateri pa zahtevajo, da omrežje ostane nespremenjeno, tudi če se napaka v delu
omrežja ponavlja. Zaradi teh različnih variacij ob napakah v omrežju, MiWi protokolna
plast nima privzetih načinov za okrevanje iz napak.
MiWi protokol nudi ACK na obeh plasteh, tako na MAC plasti kot na plasteh MiWi
protokola. To omogoča uporabnikom, da je njihov paket dosegel ciljni naslov pravilno ali
pa ugotovi, da paket ni dosegel cilja. ACK se lahko uporablja za ugotavljanje, kje v
omrežju se pojavljajo napake.
Odločitev o tem, kdaj komunicirati z vozliščem in zakaj ni več na razpolago (napaka
paketa, majhen RSSI, majhen podatkovni prenos), ni značilnost te implementacije.
Trenutna plast ne podpira teh zahtev. Če se pojavi aplikacija s takšnimi zahtevami, se jo
Brezžično senzorsko omrežje MiWi
45
doda v aplikacijsko plast, ali pa se spremeni funkcionalnost trenutne plasti, če pride do
take zahteve s strani uporabnika.
Ena izmed možnih napak se pojavi, kadar starš naprave odpove. V nekaterih omrežjih je
to rešeno tako, da naprava, ki je vezana na to starševsko napravo, ki je odpovedala,
najde novega starša, medtem ko je v drugih omrežjih ta naprava zapuščena, dokler se ne
vrne njen starš nazaj. Nekatere implemantacije imajo rajši, da se ta del okvarjene
povezave seli na drug del omrežja in tam zopet zaživi, medtem ko imajo druge
implementacije to urejeno tako, da se ob napaki (odpovedi) komunikacija seli v drugo
omrežje.
Še en izziv, ki ni rešen v plasti, je, kako razlikovati vozlišče od koordinatorja (ali končne
naprave) in PAN koordinatorja, če PAN koordinator odpove. Ker MiWi plast ne ugotovi,
kdaj je naprava v stanju brez povezave (ang. offline), tudi ne more pričeti s tem procesom.
Sprememba koordinatorja v PAN koordinatorja lahko povzroči spor, ki ima za posledico,
da se koordinatorjevi starejši otroci izklopijo iz omrežja. V mislih moramo imeti, da je
naslov PAN koordinatorja vedno 0000h. To pomeni, da mora sedaj koordinator spremeniti
svoj naslov (če hoče zamenjati PAN koordinatorja) in hkrati s tem morajo tudi vsi prejšnji
naslovi njegovih otrok biti spremenjeni. Kateri koordinator bo prevzel vlogo PAN
koordinatorja, je zopet bolje, da je v domeni aplikacije. Veliko omrežij lahko deluje v redu,
tudi če nimajo PAN koordinatorja. Tudi usmerjanje in vklapljanje naprav v omrežju deluje
brez prisotnosti PAN koordinatorja. Vendar pa ni dovoljeno vključevanje novih
koordinatorjev, dokler PAN koordinator ni povezan v omrežje.
5.12.3 Zamenjava EUI, ki ščiti pred selitvijo vozlišč
Vozlišča v brezžičnem omrežju lahko spremenijo svoje starše zaradi različnih vzrokov, ki
vključujejo tudi napake in mobilnost oziroma krajevne premike v omrežju. V taki situaciji
se kratki naslov naprave spremeni. Vozlišča, ki so komunicirala z vozliščem, ki se je
premaknilo drugam, ne bodo več dolgo zmožna komunicirati z njim. To je zaradi razloga,
ker naprave, ki skrbijo za vzdrževanje povezave, kljub mobilnosti vozlišč lahko najdejo
zahtevo po EUI naslovu vozlišča po vzpostavljeni komunikaciji s to napravo.
Brezžično senzorsko omrežje MiWi
46
5.12.4 Sprejem odgovora na odprt vtičnik
Plast zagotavlja sredstva za vzpostavitev dinamičnih poti med dvema napravama z
zahtevo po vzpostavitvi indirektne komunikacije (tako imenovan vtičnik v MiWi protokolu).
Ko zahteva vrne nek rezultat, to zgolj kaže na to, da je druga naprava iskala
komunikacijskega partnerja v isti časovni reži. To ne pomeni, da naprava hoče
komunicirati z drugo napravo. Odločitev o tem, ali je vrnjeno vozlišče sprejemljivo ali ne, je
v domeni aplikacijske plasti.
5.12.5 Omrežni otoki
Koordinator in PAN koordinator v MiWi protokolu se ne razlikujeta veliko glede na
funkcionalnost. Zaradi tega je mogoče ustvariti koordinatorja, ki lahko zamenja PAN
koordinatorja (prevzame njegovo vlogo), če ne najde primernega omrežja. To predstavlja
zanimiv izziv, če je celotno omrežje odvisno od energijskega cikla.
Na primer omrežje s PAN koordinatorjem, ki ima dva koordinatorja, ki sta locirana izven
svojih dosegov in z različnimi končnimi napravami. Če je celotno omrežje odvisno od
energijskega cikla in dva koordinatorja prideta v komunikacijo, bosta oba najprej iskala
PAN koordinatorja. Ker ne bosta videla PAN koordinatorja, bosta hotela vsak zase graditi
svoje omrežje, po možnosti še na drugem kanalu. Čez nekaj časa se bo izvorni PAN
koordinator vključil in hotel poiskati svoje omrežje. Našel bo dve različni omrežji, ki
spadata k vsakemu PAN koordinatorju posebej, in se hotel k enemu priključiti. To bo
povzročilo oblikovanje dveh različnih omrežij, ki ne moreta komunicirati med seboj,
namesto da bi to bilo eno samo večje omrežje.
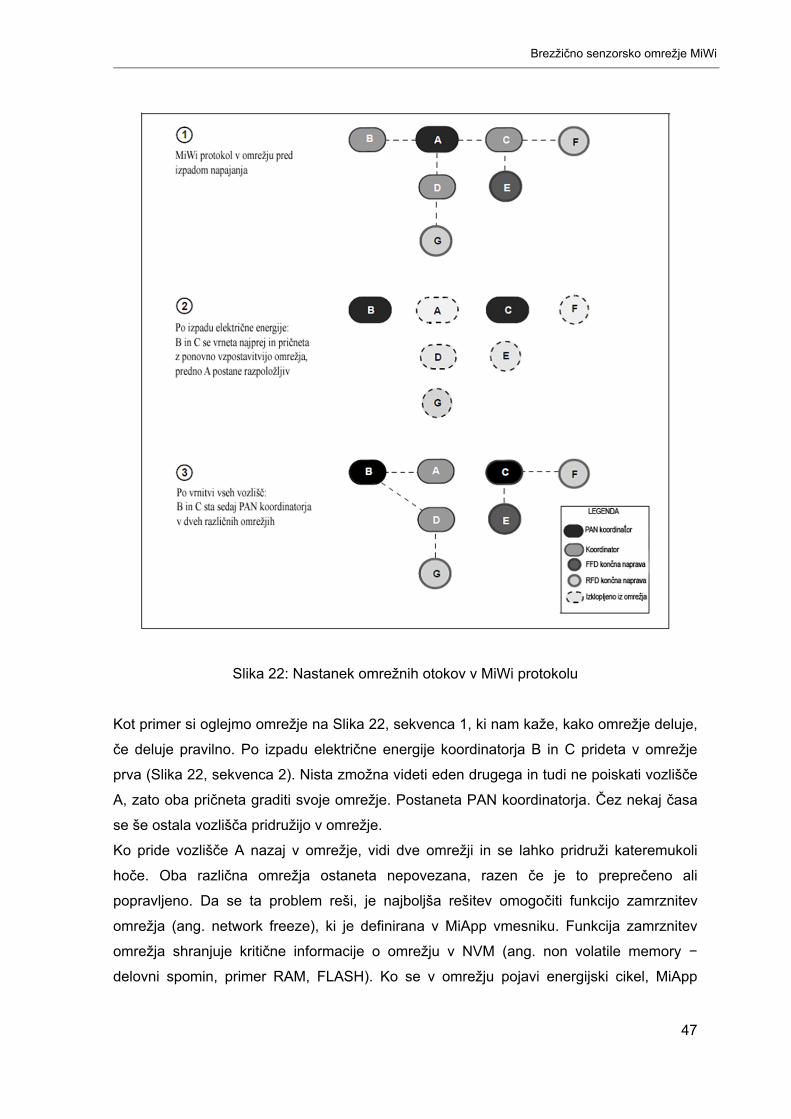
Brezžično senzorsko omrežje MiWi
47
Slika 22: Nastanek omrežnih otokov v MiWi protokolu
Kot primer si oglejmo omrežje na Slika 22, sekvenca 1, ki nam kaže, kako omrežje deluje,
če deluje pravilno. Po izpadu električne energije koordinatorja B in C prideta v omrežje
prva (Slika 22, sekvenca 2). Nista zmožna videti eden drugega in tudi ne poiskati vozlišče
A, zato oba pričneta graditi svoje omrežje. Postaneta PAN koordinatorja. Čez nekaj časa
se še ostala vozlišča pridružijo v omrežje.
Ko pride vozlišče A nazaj v omrežje, vidi dve omrežji in se lahko pridruži kateremukoli
hoče. Oba različna omrežja ostaneta nepovezana, razen če je to preprečeno ali
popravljeno. Da se ta problem reši, je najboljša rešitev omogočiti funkcijo zamrznitev
omrežja (ang. network freeze), ki je definirana v MiApp vmesniku. Funkcija zamrznitev
omrežja shranjuje kritične informacije o omrežju v NVM (ang. non volatile memory −
delovni spomin, primer RAM, FLASH). Ko se v omrežju pojavi energijski cikel, MiApp
Brezžično senzorsko omrežje MiWi
48
prebere podatke o omrežju iz NVM in povrne omrežje v stanje, ki je bilo pred energetskim
ciklom.
5.12.6 Varnost
V brezžičnih sistemih je varnost eden izmed pomembnih dejavnikov pri vzpostavitvi
komunikacije. Eno izmed orodij za zagotavljanje varnosti so tako imenovani ključi, ki so v
bistvu varnostne kode pri prepoznavanju objektov pred vzpostavitvijo komunikacije.
Obstajajo primeri, ko je potrebno prenesti ključ. V nekaterih aplikacijah se naprave lahko
pridružijo omrežju, ne da imajo vnaprej določen ključ, ampak dobijo dodeljen ključ šele
enkrat, ko so že v omrežju. Nekatera omrežja svoje ključe osvežujejo periodično.
Uporabniki spodbujajo implementacijo tako imenovanega procesa izmenjave ključa (ang.
key handling procedure) v aplikacijski plasti z ločenim poročilom o tipu (ang. report type)
in poročilom o ID (ang. report ID). Ena metoda za doseganje tega je prenos varnostnega
ključa in zaporedja števila ključev (ang. key sequence number) vsakokrat, ko se vozlišče
poveže v omrežje, hkrati pa se shranita oba podatka v RAM.
Ta pristop zadovolji samo minimalne zahteve o varnosti v omrežju, kajti varnostni ključ se
prenese vsakokrat, ko se vozlišče pridruži omrežju. Alternativa temu pristopu je postopek,
da se vsaki napravi dodeli nek privzeti ključ, s katerim se zaščiti poslan ključ. Ta pristop
nudi minimalno zaščito za ključe.
Tretji, bolj varen pristop, temelji na dodani novi funkciji, ki shrani podatke v NVM med
delovanjem. Tukaj se morata varnostni ključ in zaporedje števila ključev samo enkrat
prenesti, to je takrat, ko se naprava prvič poveže v omrežje. Tako pridobljena varnostna
informacija je zadržana v programskem spominu in je ni treba ponovno poslati po
omrežju, če naprava zapusti ali se ponovno pridruži omrežju. Te metode prenašanja
ključa so samo predlogi. Če je ta funkcionalnost zahtevana s strani aplikacije, je
prepuščena uporabniku, da on sam implementira zanj primerno metodo.
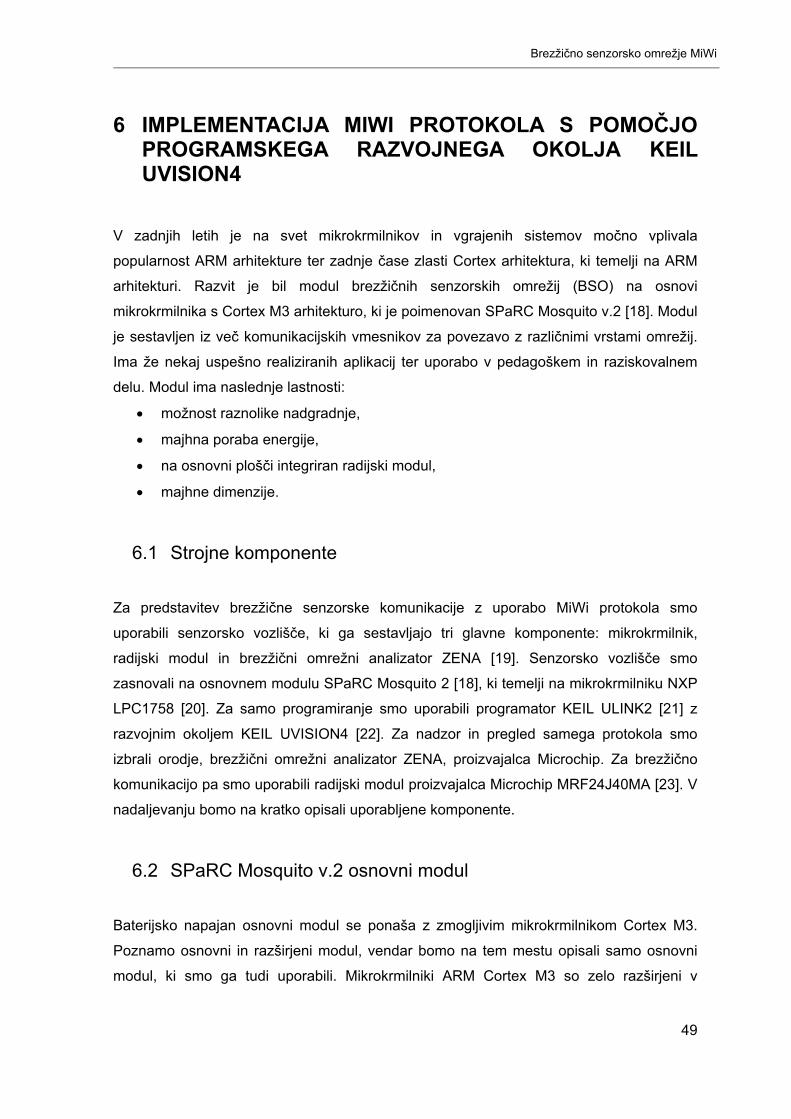
Brezžično senzorsko omrežje MiWi
49
6 IMPLEMENTACIJA MIWI PROTOKOLA S POMOČJO PROGRAMSKEGA RAZVOJNEGA OKOLJA KEIL UVISION4
V zadnjih letih je na svet mikrokrmilnikov in vgrajenih sistemov močno vplivala
popularnost ARM arhitekture ter zadnje čase zlasti Cortex arhitektura, ki temelji na ARM
arhitekturi. Razvit je bil modul brezžičnih senzorskih omrežij (BSO) na osnovi
mikrokrmilnika s Cortex M3 arhitekturo, ki je poimenovan SPaRC Mosquito v.2 [18]. Modul
je sestavljen iz več komunikacijskih vmesnikov za povezavo z različnimi vrstami omrežij.
Ima že nekaj uspešno realiziranih aplikacij ter uporabo v pedagoškem in raziskovalnem
delu. Modul ima naslednje lastnosti:
možnost raznolike nadgradnje,
majhna poraba energije,
na osnovni plošči integriran radijski modul,
majhne dimenzije.
6.1 Strojne komponente
Za predstavitev brezžične senzorske komunikacije z uporabo MiWi protokola smo
uporabili senzorsko vozlišče, ki ga sestavljajo tri glavne komponente: mikrokrmilnik,
radijski modul in brezžični omrežni analizator ZENA [19]. Senzorsko vozlišče smo
zasnovali na osnovnem modulu SPaRC Mosquito 2 [18], ki temelji na mikrokrmilniku NXP
LPC1758 [20]. Za samo programiranje smo uporabili programator KEIL ULINK2 [21] z
razvojnim okoljem KEIL UVISION4 [22]. Za nadzor in pregled samega protokola smo
izbrali orodje, brezžični omrežni analizator ZENA, proizvajalca Microchip. Za brezžično
komunikacijo pa smo uporabili radijski modul proizvajalca Microchip MRF24J40MA [23]. V
nadaljevanju bomo na kratko opisali uporabljene komponente.
6.2 SPaRC Mosquito v.2 osnovni modul
Baterijsko napajan osnovni modul se ponaša z zmogljivim mikrokrmilnikom Cortex M3.
Poznamo osnovni in razširjeni modul, vendar bomo na tem mestu opisali samo osnovni
modul, ki smo ga tudi uporabili. Mikrokrmilniki ARM Cortex M3 so zelo razširjeni v
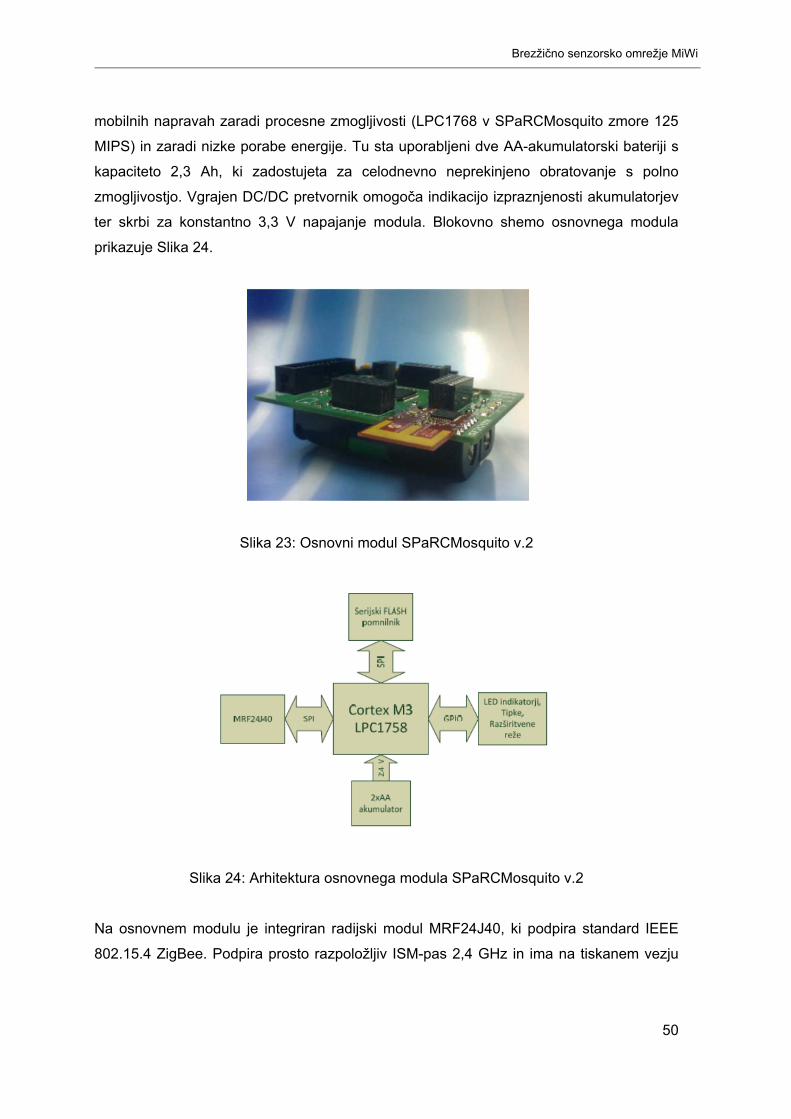
Brezžično senzorsko omrežje MiWi
50
mobilnih napravah zaradi procesne zmogljivosti (LPC1768 v SPaRCMosquito zmore 125
MIPS) in zaradi nizke porabe energije. Tu sta uporabljeni dve AA-akumulatorski bateriji s
kapaciteto 2,3 Ah, ki zadostujeta za celodnevno neprekinjeno obratovanje s polno
zmogljivostjo. Vgrajen DC/DC pretvornik omogoča indikacijo izpraznjenosti akumulatorjev
ter skrbi za konstantno 3,3 V napajanje modula. Blokovno shemo osnovnega modula
prikazuje Slika 24.
Slika 23: Osnovni modul SPaRCMosquito v.2
Slika 24: Arhitektura osnovnega modula SPaRCMosquito v.2
Na osnovnem modulu je integriran radijski modul MRF24J40, ki podpira standard IEEE
802.15.4 ZigBee. Podpira prosto razpoložljiv ISM-pas 2,4 GHz in ima na tiskanem vezju
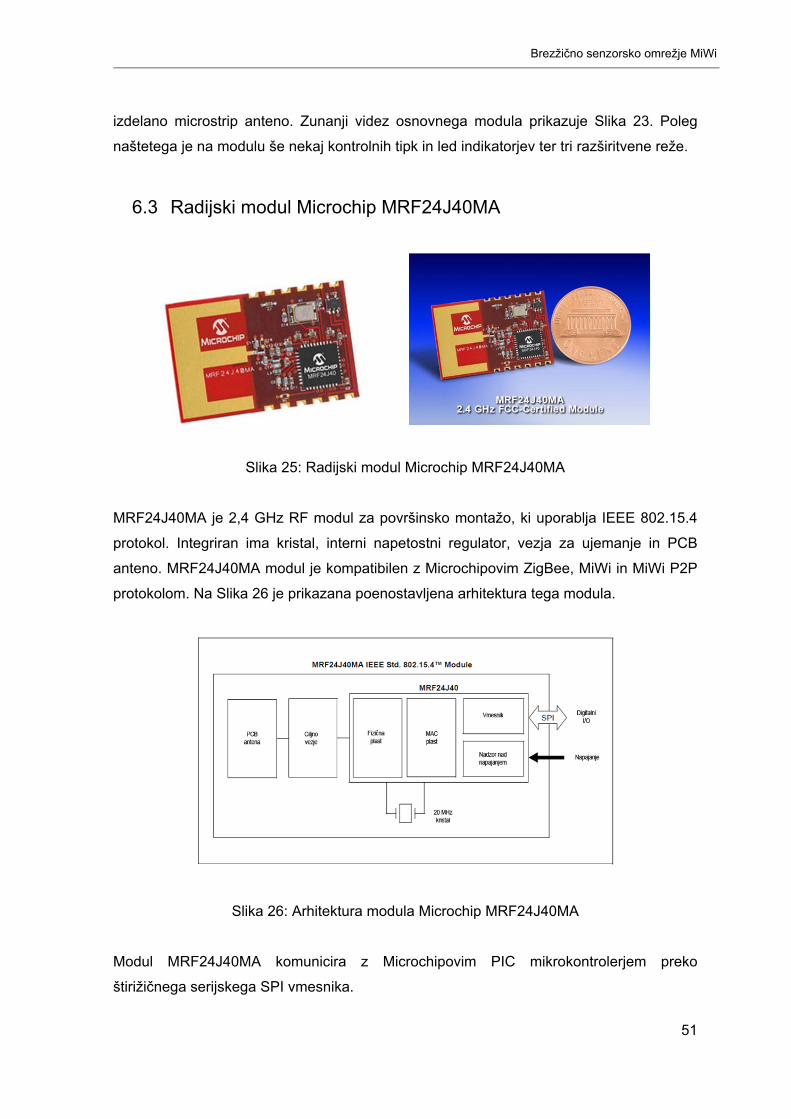
Brezžično senzorsko omrežje MiWi
51
izdelano microstrip anteno. Zunanji videz osnovnega modula prikazuje Slika 23. Poleg
naštetega je na modulu še nekaj kontrolnih tipk in led indikatorjev ter tri razširitvene reže.
6.3 Radijski modul Microchip MRF24J40MA
Slika 25: Radijski modul Microchip MRF24J40MA
MRF24J40MA je 2,4 GHz RF modul za površinsko montažo, ki uporablja IEEE 802.15.4
protokol. Integriran ima kristal, interni napetostni regulator, vezja za ujemanje in PCB
anteno. MRF24J40MA modul je kompatibilen z Microchipovim ZigBee, MiWi in MiWi P2P
protokolom. Na Slika 26 je prikazana poenostavljena arhitektura tega modula.
Slika 26: Arhitektura modula Microchip MRF24J40MA
Modul MRF24J40MA komunicira z Microchipovim PIC mikrokontrolerjem preko
štirižičnega serijskega SPI vmesnika.
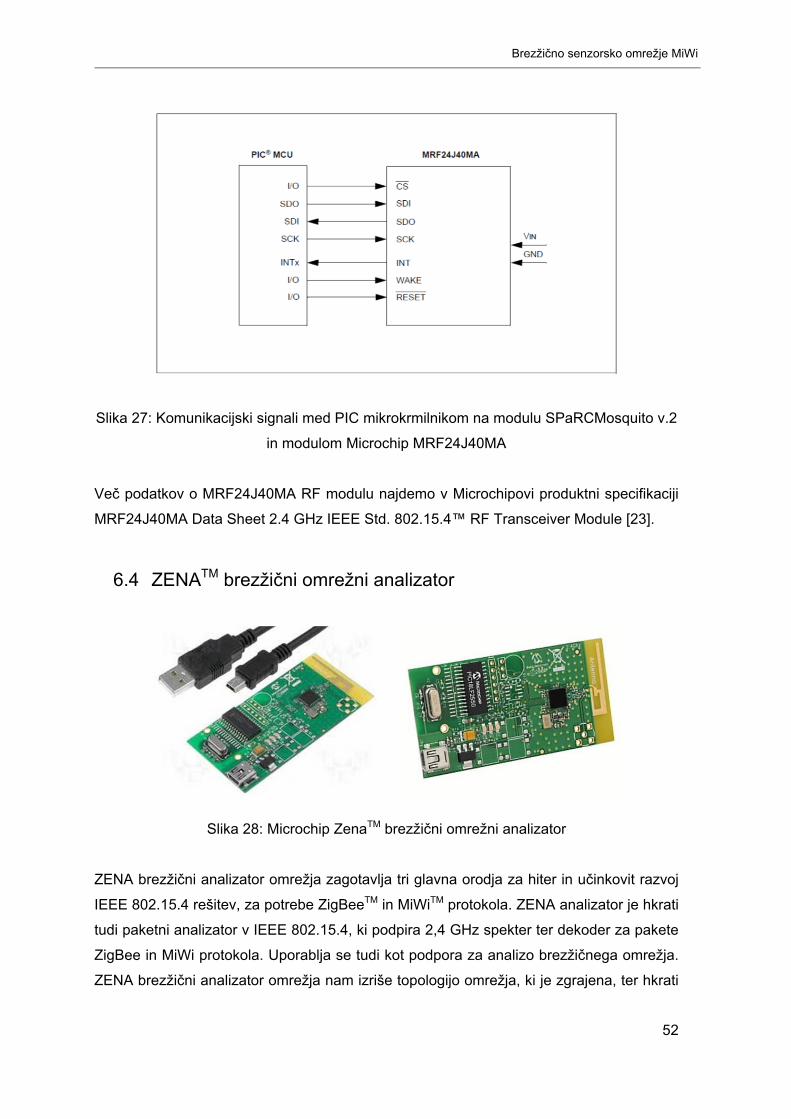
Brezžično senzorsko omrežje MiWi
52
Slika 27: Komunikacijski signali med PIC mikrokrmilnikom na modulu SPaRCMosquito v.2
in modulom Microchip MRF24J40MA
Več podatkov o MRF24J40MA RF modulu najdemo v Microchipovi produktni specifikaciji
MRF24J40MA Data Sheet 2.4 GHz IEEE Std. 802.15.4™ RF Transceiver Module [23].
6.4 ZENATM brezžični omrežni analizator
Slika 28: Microchip ZenaTM brezžični omrežni analizator
ZENA brezžični analizator omrežja zagotavlja tri glavna orodja za hiter in učinkovit razvoj
IEEE 802.15.4 rešitev, za potrebe ZigBeeTM in MiWiTM protokola. ZENA analizator je hkrati
tudi paketni analizator v IEEE 802.15.4, ki podpira 2,4 GHz spekter ter dekoder za pakete
ZigBee in MiWi protokola. Uporablja se tudi kot podpora za analizo brezžičnega omrežja.
ZENA brezžični analizator omrežja nam izriše topologijo omrežja, ki je zgrajena, ter hkrati
Brezžično senzorsko omrežje MiWi
53
uporabniku omogoča spremljanje paketov v omrežju, shranjevanje poti, ki jih paketi
uporabljajo v omrežju, ter ponovni pregled in spremljanje paketa v različnih uporabniško
določenih hitrostih. ZENA brezžični analizator omrežja ima vgrajen mini-B USB port, za
povezavo na PC. Napajanje dobi preko USB vodila. Vgrajeno ima tudi PCB anteno, preko
katere se poveže in sprejema podatke iz brezžičnega omrežja ter jih preko USB vodila
pošlje v PC, kjer se s pomočjo uporabniškega vmesnika lahko pregledajo.
Več podatkov o ZENA brezžičnem analizatorju omrežja najdemo v Microchipovih
uporabniških navodilih ZENA™ Wireless Network Analyzer [19].
Izbrati je potrebno zavihek MiWi v glavnem oknu prikazan na Slika 29, da pridemo v
naslednje uporabniško okno, v katerem so nastavitve za MiWi protokol.
Slika 29: Glavno okno ob zagonu ZENA brezžičnega analizatorja omrežja
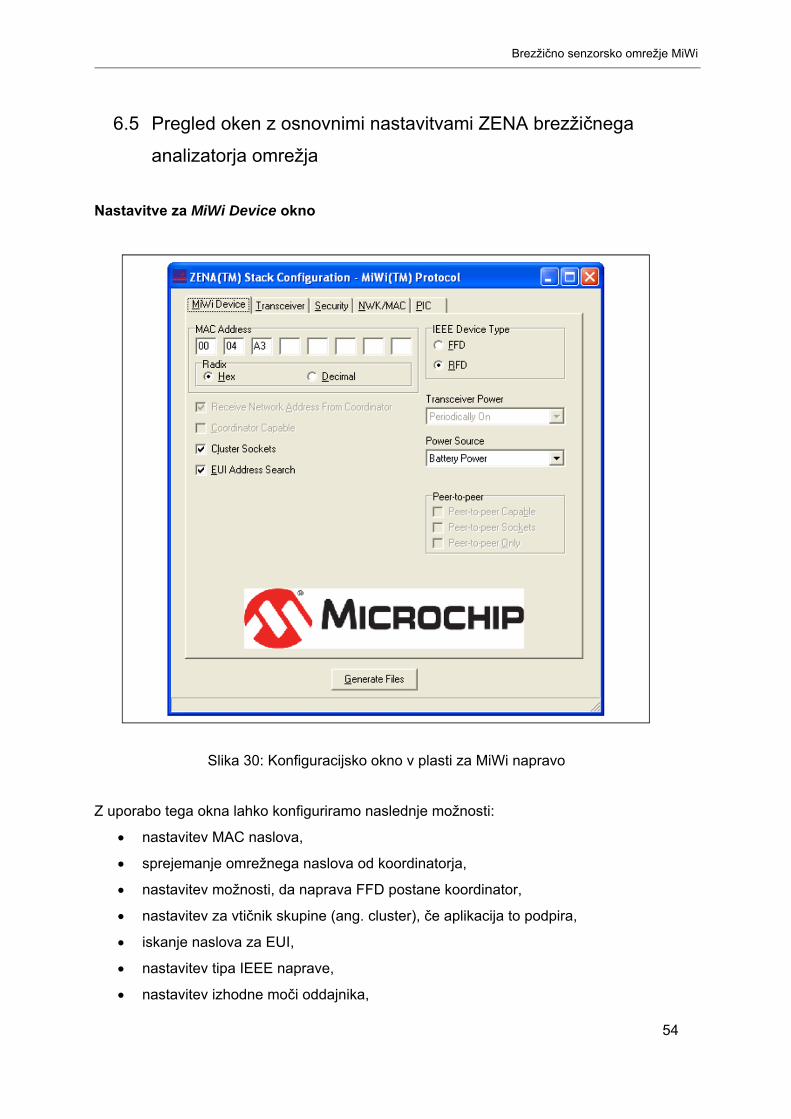
Brezžično senzorsko omrežje MiWi
54
6.5 Pregled oken z osnovnimi nastavitvami ZENA brezžičnega
analizatorja omrežja
Nastavitve za MiWi Device okno
Slika 30: Konfiguracijsko okno v plasti za MiWi napravo
Z uporabo tega okna lahko konfiguriramo naslednje možnosti:
nastavitev MAC naslova,
sprejemanje omrežnega naslova od koordinatorja,
nastavitev možnosti, da naprava FFD postane koordinator,
nastavitev za vtičnik skupine (ang. cluster), če aplikacija to podpira,
iskanje naslova za EUI,
nastavitev tipa IEEE naprave,
nastavitev izhodne moči oddajnika,

Brezžično senzorsko omrežje MiWi
55
izbor osnovnega napajanja aplikacije,
izbor osnovnega napajanja, ki je na razpolago aplikaciji,
možnost nastavitve P2P komunikacije,
možnost nastavitve P2P vtičnikov, če jih aplikacija podpira.
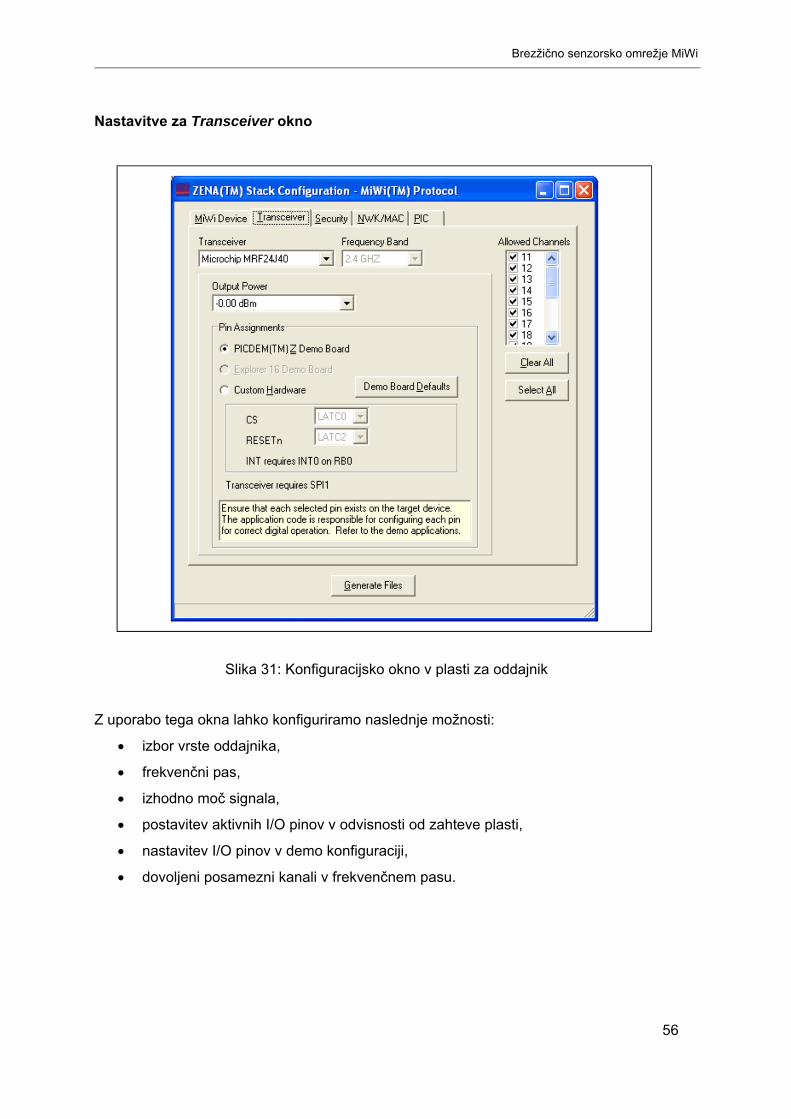
Brezžično senzorsko omrežje MiWi
56
Nastavitve za Transceiver okno
Slika 31: Konfiguracijsko okno v plasti za oddajnik
Z uporabo tega okna lahko konfiguriramo naslednje možnosti:
izbor vrste oddajnika,
frekvenčni pas,
izhodno moč signala,
postavitev aktivnih I/O pinov v odvisnosti od zahteve plasti,
nastavitev I/O pinov v demo konfiguraciji,
dovoljeni posamezni kanali v frekvenčnem pasu.
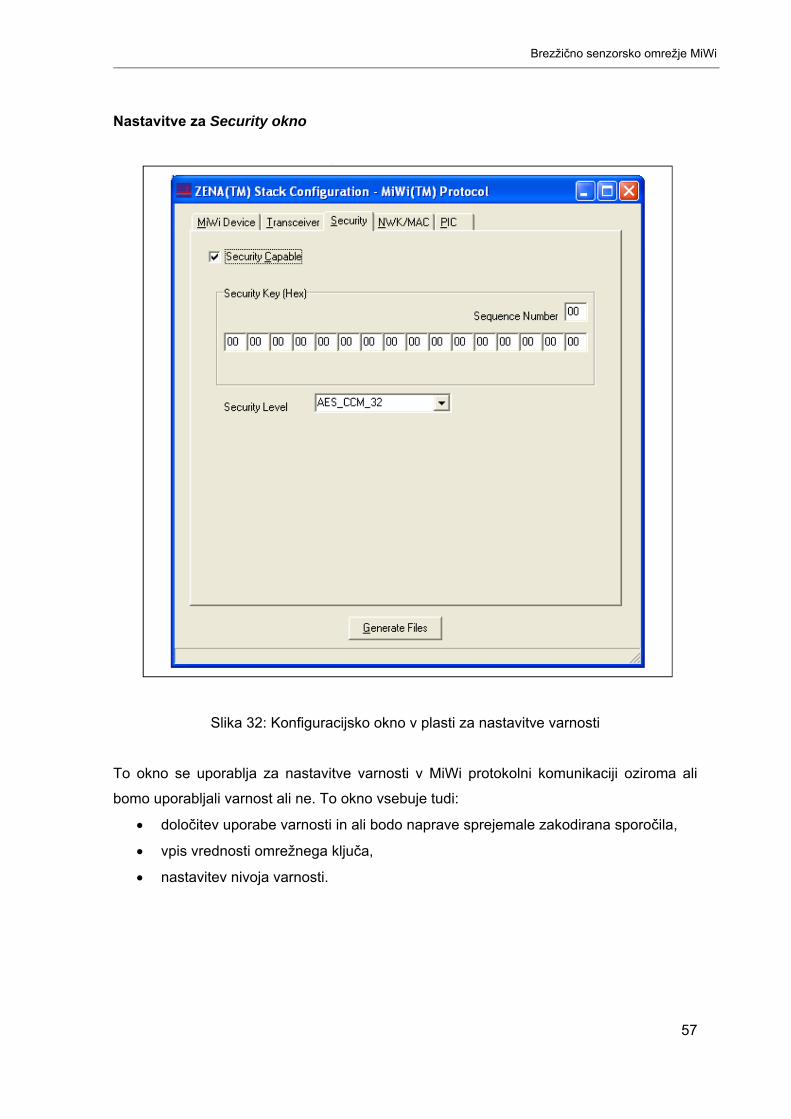
Brezžično senzorsko omrežje MiWi
57
Nastavitve za Security okno
Slika 32: Konfiguracijsko okno v plasti za nastavitve varnosti
To okno se uporablja za nastavitve varnosti v MiWi protokolni komunikaciji oziroma ali
bomo uporabljali varnost ali ne. To okno vsebuje tudi:
določitev uporabe varnosti in ali bodo naprave sprejemale zakodirana sporočila,
vpis vrednosti omrežnega ključa,
nastavitev nivoja varnosti.
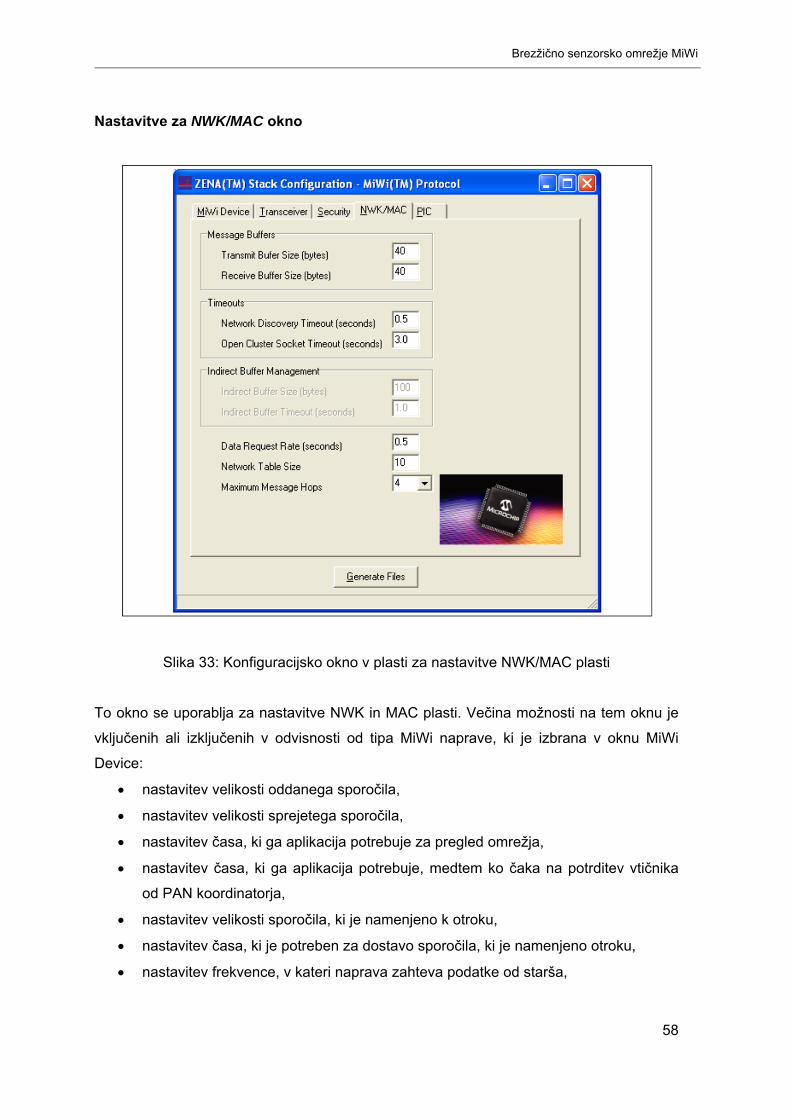
Brezžično senzorsko omrežje MiWi
58
Nastavitve za NWK/MAC okno
Slika 33: Konfiguracijsko okno v plasti za nastavitve NWK/MAC plasti
To okno se uporablja za nastavitve NWK in MAC plasti. Večina možnosti na tem oknu je
vključenih ali izključenih v odvisnosti od tipa MiWi naprave, ki je izbrana v oknu MiWi
Device:
nastavitev velikosti oddanega sporočila,
nastavitev velikosti sprejetega sporočila,
nastavitev časa, ki ga aplikacija potrebuje za pregled omrežja,
nastavitev časa, ki ga aplikacija potrebuje, medtem ko čaka na potrditev vtičnika
od PAN koordinatorja,
nastavitev velikosti sporočila, ki je namenjeno k otroku,
nastavitev časa, ki je potreben za dostavo sporočila, ki je namenjeno otroku,
nastavitev frekvence, v kateri naprava zahteva podatke od starša,

Brezžično senzorsko omrežje MiWi
59
nastavitev velikosti omrežne tabele, kjer se shranjujejo naslovi in poti posameznih
naprav v MiWi omrežju,
nastavitev največjega števila skokov za posamezno sporočilo, ki je še dovoljeno.
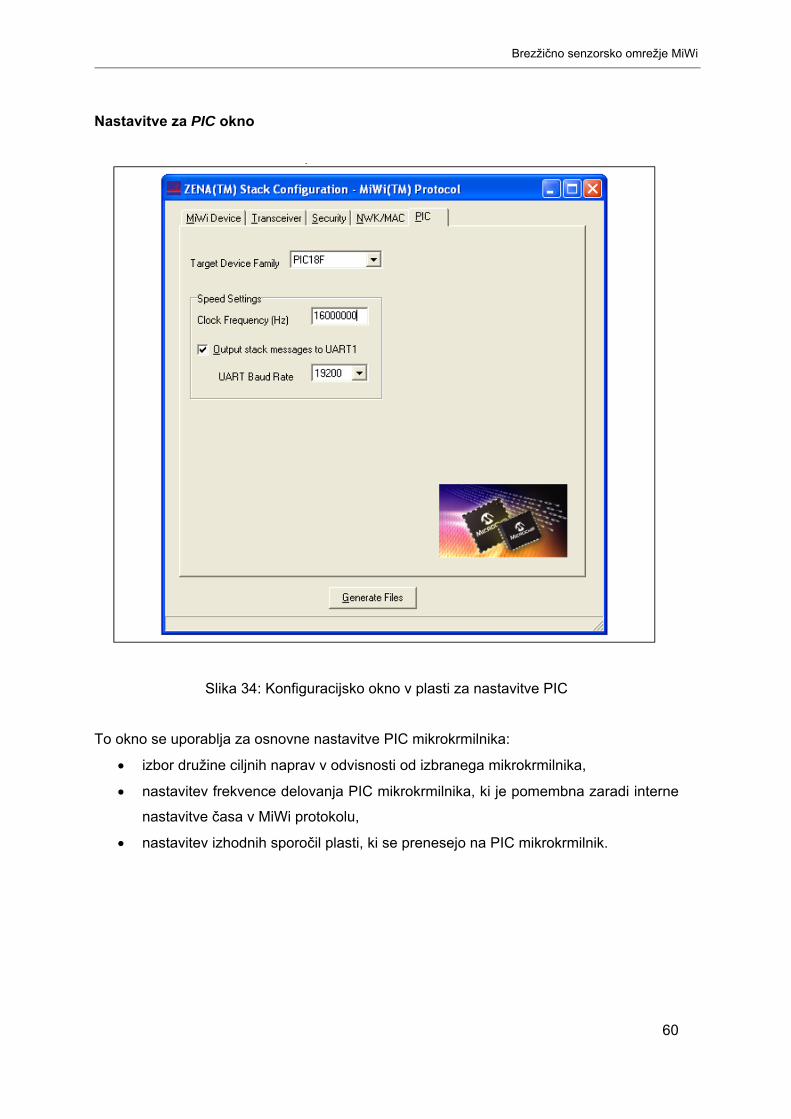
Brezžično senzorsko omrežje MiWi
60
Nastavitve za PIC okno
Slika 34: Konfiguracijsko okno v plasti za nastavitve PIC
To okno se uporablja za osnovne nastavitve PIC mikrokrmilnika:
izbor družine ciljnih naprav v odvisnosti od izbranega mikrokrmilnika,
nastavitev frekvence delovanja PIC mikrokrmilnika, ki je pomembna zaradi interne
nastavitve časa v MiWi protokolu,
nastavitev izhodnih sporočil plasti, ki se prenesejo na PIC mikrokrmilnik.
Brezžično senzorsko omrežje MiWi
61
7 SKLEP
Za razvijalce je MiWi protokol vstopna točka v brezžična omrežja, ker zagotavlja nizko
cenovno platformo za lahek in hiter razvoj brezžičnega omrežja kratkega dosega. Hkrati
MiWi protokol zagotavlja funkcije, ki lažje pomagajo pri implementaciji preprostih
brezžičnih omrežij. Namen tega protokola pa ni, da bi definiral vse možne scenarije in
zahtevane odločitve pri ustvarjanju brezžičnih rešitev.
MiWi protokol je vstopna točka za Microchipove brezžične rešitve, ki temeljijo na
standardu IEEE 802.15.4. Vsi uporabniki, ki rabijo bolj kompleksne rešitve v brezžičnih
omrežjih, bodo morali poseči po ZigBee oziroma bodo morali razširiti protokol MiWi glede
na svoje potrebe.
V diplomskem delu smo analizirali in preučili komunikacijski protokol MiWi za potrebe
komunikacij v industrijskih aplikacijah.
MiWi protokol smo za potrebe testiranja implementirali na enostavnem primeru
brezžičnega senzorskega omrežja P2P. Glavne komponente, ki smo jih pri tem uporabili,
so:
KEIL ULINK 2 razvojno okolje za procesorje iz družin Cortex-Mx, ARM7, ARM9,
C166, XE166, XC2000 in 8051, katerega naloga je bila povezati vrata USB
računalnika na naš ciljni sistem (preko JTAG, SWD ali OCDS). Omogočilo nam je
programiranje in razhroščevanje vgrajenih programov na ciljni strojni opremi
SPaRC Mosquito v.2
UVISION 4 programsko opremo smo uporabljali za urejanje izvorne kode
programa, odpravljanje napak in simulacijo v zmogljivem okolju
baterijsko napajan osnovni modul SPaRC Mosquito v.2 z mikrokrmilnikom NXP
LPC 1758 iz družine Cortex M3 smo uporabili za izvajanje aplikacij na modulu
SPaRC Mosquito v.2
radijski modul Microchip MRF24J40MA, ki je integriran in povezan s pomočjo SPI
vodila na modul SPaRC Mosquito v.2, smo uporabili za izvedbo in testiranje MiWi
protokola
s pomočjo Microchipovega ZenaTM brezžičnega omrežnega analizatorja in z
uporabo enostavnega grafičnega vmesnika smo spremljali, kako pride do
vzpostavitve komunikacijske povezave in kako se prenese podatek preko MiWi
Brezžično senzorsko omrežje MiWi
62
omrežja med modulom SPaRC Mosquito v.2, ki deluje kot PAN koordinator, in
med ZenaTM brezžičnim analizatorjem.
Ugotovili smo, da je v primeru uporabe topologije zvezda in samo MiWi PAN koordinatorja
sistem relativno enostavno obvladljiv. Če dodamo več RFD ali FFD končnih naprav in
uporabimo P2P topologijo ter več povezav med njimi, se bistveno oteži delo z vzpostavitjo
komunikacije med njimi. Potrebno je veliko programerskega znanja za realizacijo
implementacije protokola za omrežja z več vozlišči.
Bistvena razlika med protokoloma ZigBee in MiWi P2P je:
podatkovni nizi so v MiWi protokolu zelo majhni, od 3 KB do17 KB, medtem ko so
pri ZigBee v velikosti od 40 KB do100 KB, zato je MiWi protokol bolj primeren za
cenejše aplikacije z omejenim pomnilnikom,
protokolni sklad MiWi P2P podpira topologijo zvezda in topologijo P2P (ang. peer-
to-peer). V tem protokolu nimamo možnosti usmerjanja, ampak samo dostavo
sporočil v radijskem spektru izvorne naprave,
ZigBee je primeren za uporabo v industriji z velikim omrežjem, medtem ko je MiWi
primeren za majhna zasebna omrežja,
MiWi omogoča največ štiri skoke v omrežju, medtem ko ZigBee nima omejitev v
skokih,
MiWi omrežje ima lahko največ 1024 vozlišč za razliko od ZigBee, kjer jih je lahko
do 65536,
MiWi protokol se lahko brezplačno prenese s spleta, vendar se ga lahko
brezplačno uporablja samo z Microchip mikrokontrolerji.
Brezžično senzorsko omrežje MiWi
63
8 LITERATURA
[1] “WPAN,” 2013. [Online]. Available: http://www.ieee802.org/15/. [Accessed: 16-Dec-2013].
[2] IETF, “6LoWPAN,” 2013. [Online]. Available: https://ietf.org/wg/6lowpan/. [Accessed: 16-Dec-2013].
[3] ZigBee Alliance, “ZigBee,” 2013. [Online]. Available: http://www.mendeley.com/download-mendeley-desktop/welcome/?_registered&funnelType=client-desktop&skipDownload=true.
[4] Microchip, “Microchip MiWi Wireless Networking Protocol Stack,” 2010.
[5] “IETF,” 2013. [Online]. Available: http://www.ietf.org.
[6] “W3C,” 2013. [Online]. Available: http://www.w3.org.
[7] “ISO,” 2013. [Online]. Available: http://www.iso.org/iso/home.html.
[8] “IEC,” 2013. [Online]. Available: http://www.iec.ch.
[9] “ISA,” 2013. [Online]. Available: http://www.isa.org.
[10] “WirelessHART,” 2013. [Online]. Available: http://www.hartcomm.org.
[11] “ZigBee Alliance.” .
[12] ZigBee Alliance, “ZigBee Specification.” 2007.
[13] S. Das C. Perkins, E. Belding-Royer, “AODV,” 2003. [Online]. Available: http://www.ietf.org/rfc/rfc3561.txt.
[14] D. C. G. Montenegro, N. Kushalnagar, J. Hui, “Transmission of IPv6 Packets over IEEE 802.15.4 Networks,” 2007. [Online]. Available: http://www.ietf.org/rfc/rfc4944.txt.
[15] K. D. C. Shue, W. Haggerty, “OSI Connectionless Transport Services on top of UDP,” 1991. [Online]. Available: http://tools.ietf.org/html/rfc1240.
[16] “MICROCHIP TECHNOLOGY,” 2013. [Online]. Available: http://www.microchip.com.
[17] “MiWi ( TM ) P2P Stack Application Programming Interfaces,” no. c. 2008.
[18] “SPaRCMosquito v.2,” pp. 4–6, 2010.
[19] “ZENA TM Wireless Network Analyzer User ’ s Guide,” 2008.
Brezžično senzorsko omrežje MiWi
64
[20] N. X. P. Semiconductors, “UM10360 LPC17xx User manual,” no. August, 2010.
[21] “KEIL ULINK2.” [Online]. Available: http://www.keil.com/ulink2/.
[22] P. Addison, “KEIL UVISION4,” Jul. 2002.
[23] M. Technology, “MRF24J40MA,” 2008.

Brezžično senzorsko omrežje MiWi
65
9 PRILOGE