Embed Size (px)
Citation preview
Boyce/DiPrima/Meade 11th ed, Ch 4.1: Higher
Order Linear ODEs: General Theory
Elementary Differential Equations and Boundary Value Problems, 11th edition, by William E. Boyce, Richard C. DiPrima, and Doug Meade ©2017 by John
Wiley & Sons, Inc.
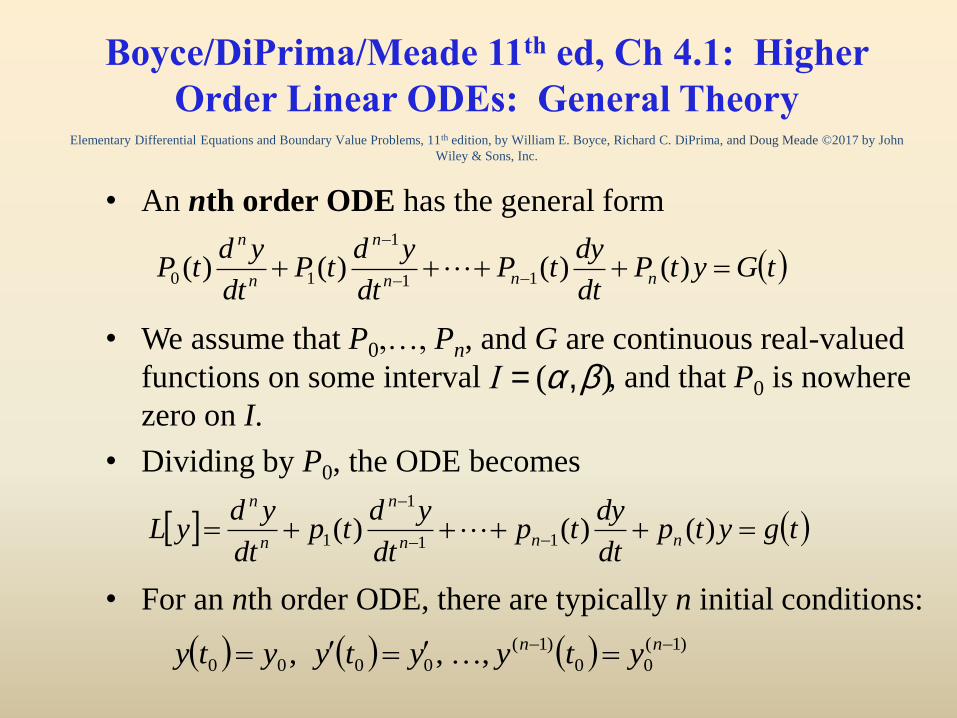
• An nth order ODE has the general form
• We assume that P0,…, Pn, and G are continuous real-valued
functions on some interval , and that P0 is nowhere
zero on I.
• Dividing by P0, the ODE becomes
• For an nth order ODE, there are typically n initial conditions:
tGytPdt
dytP
dt
ydtP
dt
ydtP nnn
n
n
n
)()()()( 11
1
10
tgytpdt
dytp
dt
ydtp
dt
ydyL nnn
n
n
n
)()()( 11
1
1
)1(
00
)1(
0000 ,,, nn ytyytyyty
I = (a,b)
Theorem 4.1.1
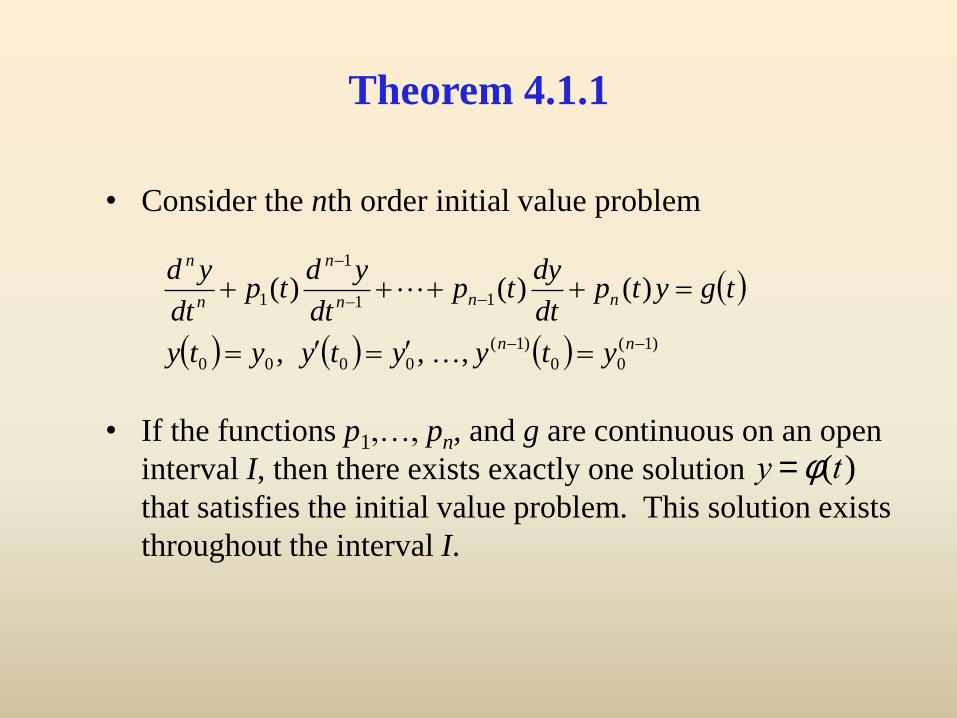
• Consider the nth order initial value problem
• If the functions p1,…, pn, and g are continuous on an open
interval I, then there exists exactly one solution
that satisfies the initial value problem. This solution exists
throughout the interval I.
)1(
00
)1(
0000
11
1
1
,,,
)()()(
nn
nnn
n
n
n
ytyytyyty
tgytpdt
dytp
dt
ydtp
dt
yd
y = f(t)
Homogeneous Equations
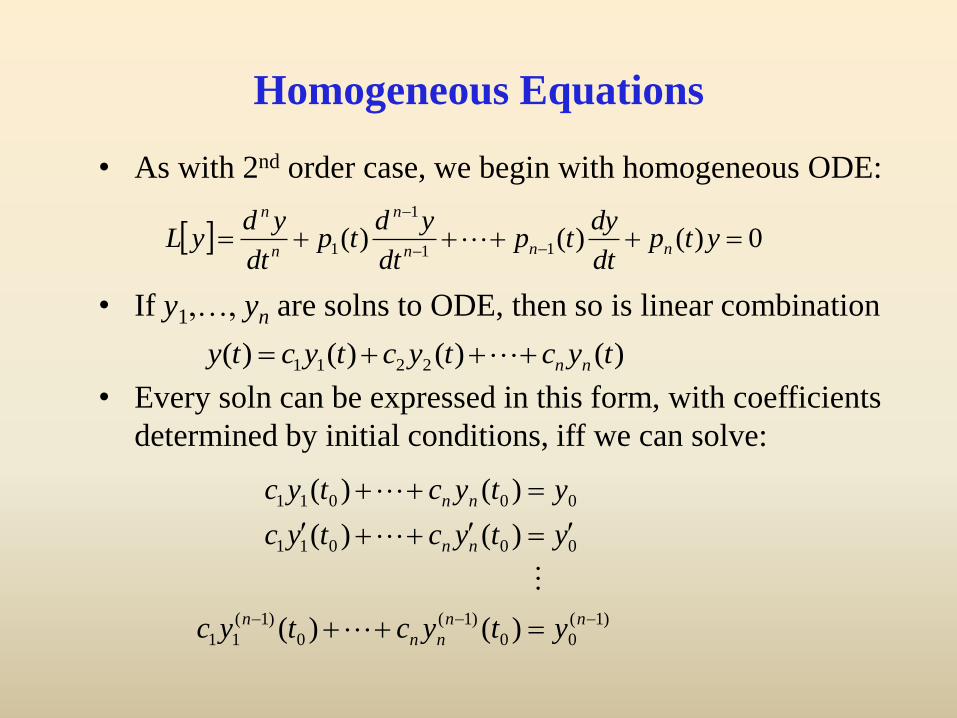
• As with 2nd order case, we begin with homogeneous ODE:
• If y1,…, yn are solns to ODE, then so is linear combination
• Every soln can be expressed in this form, with coefficients
determined by initial conditions, iff we can solve:
0)()()( 11
1
1
ytpdt
dytp
dt
ydtp
dt
ydyL nnn
n
n
n
)()()()( 2211 tyctyctycty nn
)1(
00
)1(
0
)1(
11
00011
00011
)()(
)()(
)()(
nn
nn
n
nn
nn
ytyctyc
ytyctyc
ytyctyc
Homogeneous Equations & Wronskian
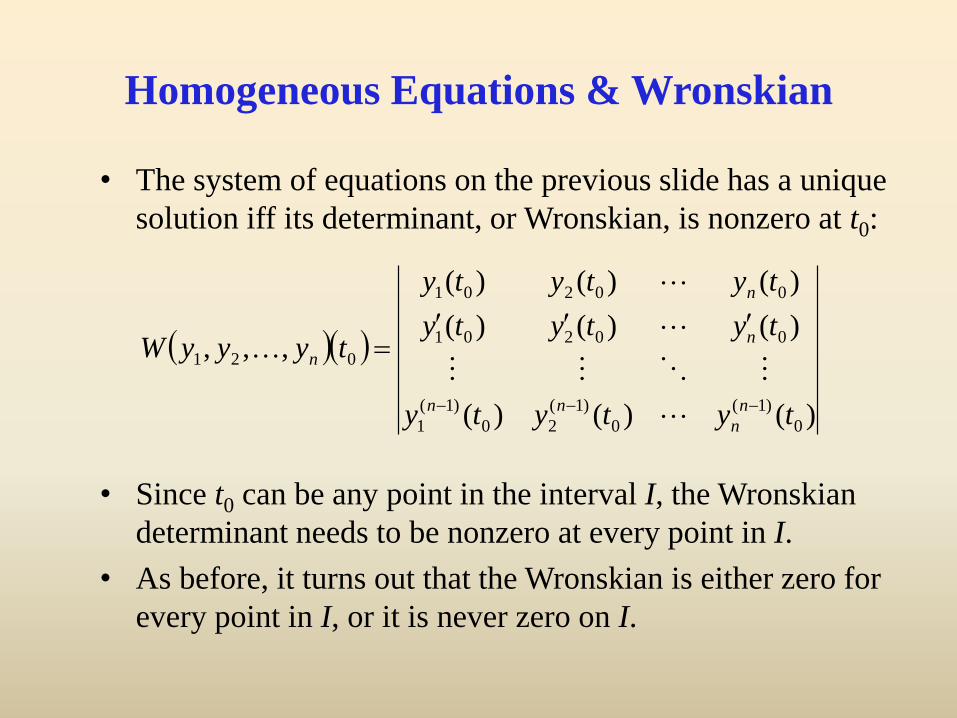
• The system of equations on the previous slide has a unique
solution iff its determinant, or Wronskian, is nonzero at t0:
• Since t0 can be any point in the interval I, the Wronskian
determinant needs to be nonzero at every point in I.
• As before, it turns out that the Wronskian is either zero for
every point in I, or it is never zero on I.
)()()(
)()()(
)()()(
,,,
0
)1(
0
)1(
20
)1(
1
00201
00201
021
tytyty
tytyty
tytyty
tyyyW
n
n
nn
n
n
n
Theorem 4.1.2
• Consider the nth order initial value problem
• If the functions p1,…, pn are continuous on an open interval I,
and if y1,…, yn are solutions with W(y1,…, yn)(t) ≠ 0 for at
least one t in I, then every solution y of the ODE can be
expressed as a linear combination of y1,…, yn:
)1(
0
)1(
0000
11
1
1
,,,
0)()()(
nn
nnn
n
n
n
ytyytyyty
ytpdt
dytp
dt
ydtp
dt
yd
)()()()( 2211 tyctyctycty nn
Linear Dependence and Independence
• Two functions f and g are linearly dependent if there exist
constants c1 and c2, not both zero, such that
for all t in I. Note that this reduces to determining whether f
and g are multiples of each other.
• If the only solution to this equation is c1 = c2 = 0, then f and g
are linearly independent.
• For example, let f(x) = sin2x and g(x) = sinx cosx, and consider
the linear combination
This equation is satisfied if we choose c1 = 1, c2 = -2, and hence
f and g are linearly dependent.
0)()( 21 tgctfc
0cossin2sin 21 xxcxc
Example 1
• Are the following functions linearly independent or
dependent on the interval I:
• Form the linear combination and set it equal to zero
• Evaluating this at t = 0, t = 1, and t = =1, we get
• The only solution to this system is
• Therefore, the given functions are linearly independent
2
321 )(,)(,1)( ttfttftf
t0
02321 tktkk
0
00
321
321
1
kkk
kkkk
0321 kkk
Example 2
• Are the following functions linearly independent or
dependent on any interval I:
• Form the linear combination and set it equal to zero
• Evaluating this at t = 0, t = 1, and t = =1, we get
• There are many nonzero solutions to this system of equations
• Therefore, the given functions are linearly dependent
24
2
321 4)(,3)(,2)(,1)( tttfttfttftf
0)4()3()2( 24
2321 ttktktkk
0
0402
43
42
321
kk
kkkkk
Theorem 4.1.3
• If {y1,…, yn} is a fundamental set of solutions of
on an interval I, then {y1,…, yn} are linearly independent on that interval.
• Conversely, if {y1,…, yn} are linearly independent solutions to the above differential equation, then they form a fundamental set of solutions on the interval I
0)()()()( 1
)1(
1
)(
ytpytpytpyyL nn
nn
Fundamental Solutions & Linear
Independence
• Consider the nth order ODE:
• A set {y1,…, yn} of solutions with W(y1,…, yn) ≠ 0 on I is
called a fundamental set of solutions.
• Since all solutions can be expressed as a linear combination
of the fundamental set of solutions, the general solution is
• If y1,…, yn are fundamental solutions, then W(y1,…, yn) ≠ 0
on I. It can be shown that this is equivalent to saying that
y1,…, yn are linearly independent:
0)()()( 1
)1(
1
)(
ytpytpytpy nn
nn
)()()()( 2211 tyctyctycty nn
0 iff 0)()()( 212211 nnn ccctyctyctyc
Nonhomogeneous Equations
• Consider the nonhomogeneous equation:
• If Y1, Y2 are solns to nonhomogeneous equation, then Y1 - Y2 is
a solution to the homogeneous equation:
• Then there exist coefficients c1,…, cn such that
• Thus the general solution to the nonhomogeneous ODE is
where Y is any particular solution to nonhomogeneous ODE.
)()()()( 11
1
1 tgytpdt
dytp
dt
ydtp
dt
ydyL nnn
n
n
n
0)()(2121 tgtgYLYLYYL
)()()()()( 221121 tyctyctyctYtY nn
)()()()()( 2211 tYtyctyctycty nn
Boyce/DiPrima/Meade 11th ed, Ch 4.2: Homogeneous
Differential Equations with Constant Coefficients
Elementary Differential Equations and Boundary Value Problems, 11th edition, by William E. Boyce, Richard C. DiPrima, and Doug Meade ©2017 by John
Wiley & Sons, Inc.
• Consider the nth order linear homogeneous differential
equation with constant, real coefficients:
• As with second order linear equations with constant
coefficients, y = ert is a solution for values of r that make
characteristic polynomial Z(r) zero:
• By the fundamental theorem of algebra, a polynomial of
degree n has n roots r1, r2, …, rn, and hence
01
)1(
1
)(
0
yayayayayL nn
nn
0
)( polynomial sticcharacteri
1
1
10
rZ
nn
nnrtrt arararaeeL
)())(()( 210 nrrrrrrarZ
Real and Unequal Roots
• If roots of characteristic polynomial Z(r) are real and
unequal, then there are n distinct solutions of the differential
equation:
• If these functions are linearly independent, then general
solution of differential equation is
• The Wronskian can be used to determine linear
independence of solutions.
trtrtr neee ,,, 21
tr
n
trtr necececty 21
21)(
Example 1: Distinct Real Roots (1 of 3)
• Consider the initial value problem
• Assuming exponential soln leads to characteristic equation:
• Thus the general solution is
03211
067)( 234
rrrr
rrrrety rt
tttt ececececty 3
4
2
321)(
1)0(,2)0(,0)0(,1)0(
067)4(
yyyy
yyyyy
Example 1: Solution (2 of 3)
• The initial conditions
yield
• Solving,
• Hence
1278
294
032
1
4321
4321
4321
4321
cccc
cccc
cccc
cccc
1)0(,2)0(,0)0(,1)0( yyyy
tttt ececececty 3
3
2
321)(
8
1,
3
2,
12
5,
8
114321 cccc
tttt eeeety 32
8
1
3
2
12
5
8
11)(
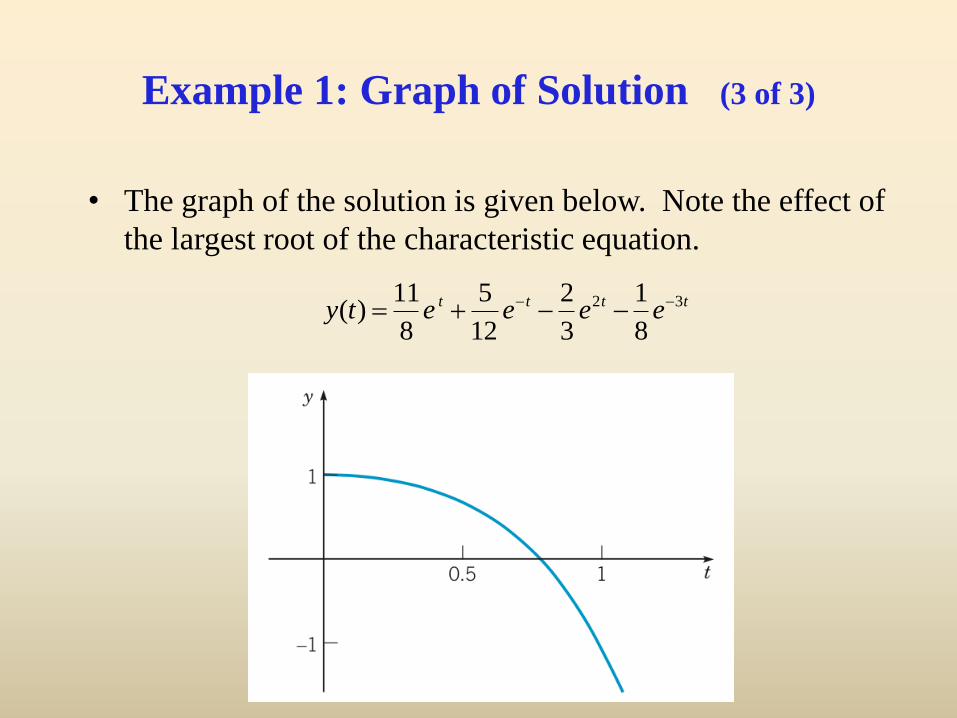
Example 1: Graph of Solution (3 of 3)
• The graph of the solution is given below. Note the effect of
the largest root of the characteristic equation.
tttt eeeety 32
8
1
3
2
12
5
8
11)(
Complex Roots
• If the characteristic polynomial Z(r) has complex roots, then
they must occur in conjugate pairs, .
• Note that not all the roots need be complex.
• Solutions corresponding to complex roots have the form
• As in Chapter 3.4, we use the real-valued solutions
tietee
tietee
ttti
ttti
sincos
sincos
tete tt sin,cos
l ± im
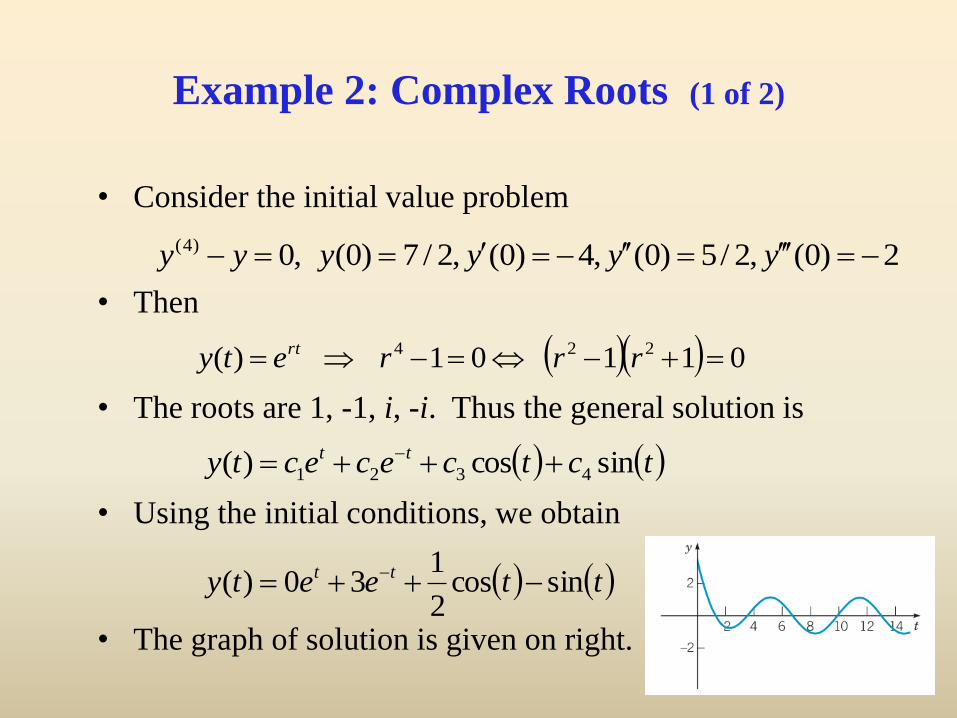
Example 2: Complex Roots (1 of 2)
• Consider the initial value problem
• Then
• The roots are 1, -1, i, -i. Thus the general solution is
• Using the initial conditions, we obtain
• The graph of solution is given on right.
01101)( 224 rrrety rt
2)0(,2/5)0(,4)0(,2/7)0(,0)4( yyyyyy
tctcececty tt sincos)( 4321
tteety tt sincos2
130)(
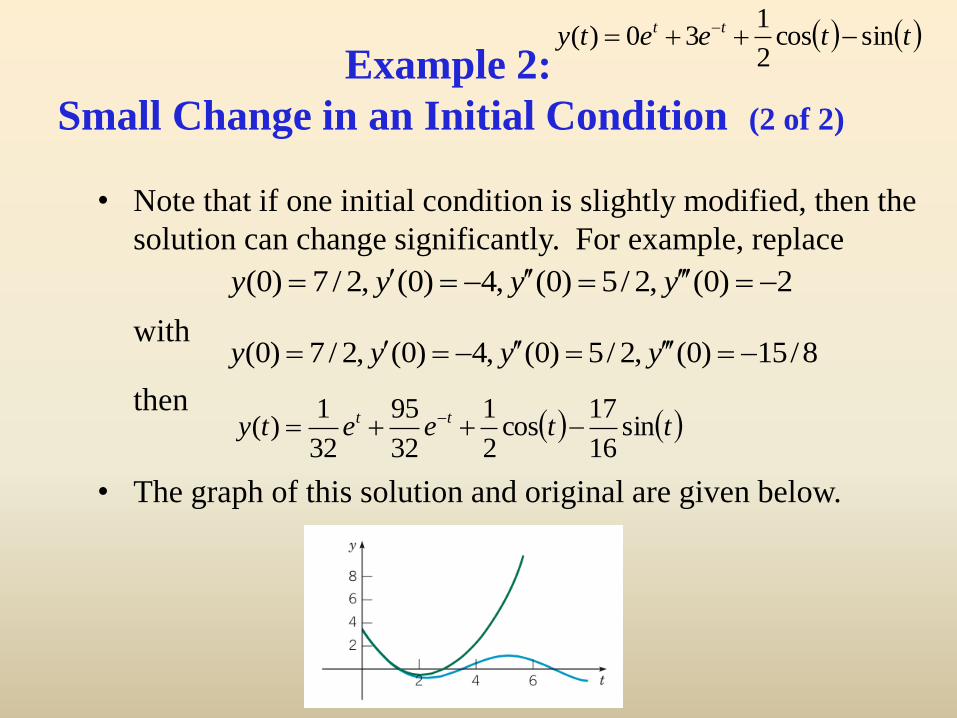
Example 2:
Small Change in an Initial Condition (2 of 2)
• Note that if one initial condition is slightly modified, then the
solution can change significantly. For example, replace
with
then
• The graph of this solution and original are given below.
tteety tt sincos2
130)(
2)0(,2/5)0(,4)0(,2/7)0( yyyy
8/15)0(,2/5)0(,4)0(,2/7)0( yyyy
tteety tt sin16
17cos
2
1
32
95
32
1)(
Repeated Roots
• Suppose a root rk of characteristic polynomial Z(r) is a
repeated root with multiplicty s. Then linearly independent
solutions corresponding to this repeated root have the form
• If a complex root is repeated s times, then so is its
conjugate . There are 2s corresponding linearly
independent solns, derived from real and imaginary parts of
or
trstrtrtr kkkk etettee 12 ,,,,
,sin,cos
,,sin,cos,sin,cos
11 teettet
ttettetete
ttrstrs
tttt
kk
tiustiutiutiu etettee 12 ,,,,
l + iml - im
Example 3: Repeated Roots
• Consider the equation
• Then
• The roots are i, i, -i, -i. Thus the general solution is
011012)( 224 rrrrety rt
02)4( yyy
ttcttctctcty sincossincos)( 4321
Example 4: Complex Roots of –1 (1 of 2)
• For the general solution of , the characteristic
equation is .
• To solve this equation, we need to use Euler’s equation to
find the four 4th roots of –1:
• Letting m = 0, 1, 2, and 3, we get the roots:
014 r
0)4( yy
-1 = cosp + isinp = eip or
-1 = cos(p + 2mp )+ isin(p + 2mp ) = ei(p+2mp ) for any integer m
(-1)1/4 = ei(p+2mp )/4 = cosp
4+mp
2
æ
èçö
ø÷+ isin
p
4+mp
2
æ
èçö
ø÷
ly.respective,2
1,
2
1,
2
1,
2
1 iiii
Example 4: Complex Roots of –1 (2 of 2)
• Given the four complex roots, extending the ideas from
Chapter 4, we can form four linearly independent real
solutions.
• For the complex conjugate pair , we get the solutions
• For the complex conjugate pair , we get the solutions
• So the general solution can be written as
2
1,
2
1,
2
1,
2
1 iiiir
2
1 i
y1 = et / 2 cos(t / 2 ), y2 = et / 2 sin(t / 2 )
2
1 i
y3 = e–t / 2 cos(t / 2 ), y4 = e–t / 2 sin(t / 2 )
c1y1 + c2y2 + c3y3 + c4y4
Boyce/DiPrima/Meade 11th ed, Ch 4.3: The Method of Undetermined
Coefficients
Elementary Differential Equations and Boundary Value Problems, 11th edition, by William E. Boyce, Richard C. DiPrima, and Doug Meade ©2017 by John Wiley & Sons, Inc.
• The method of undetermined coefficients can be used to
find a particular solution Y of an nth order linear, constant
coefficient, nonhomogeneous ODE
provided g is of an appropriate form.
• As with 2nd order equations, the method of undetermined
coefficients is typically used when g is a sum or product of
polynomial, exponential, and sine or cosine functions.
• Section 4.4 discusses the more general variation of
parameters method.
),(1
)1(
1
)(
0 tgyayayayayL nn
nn
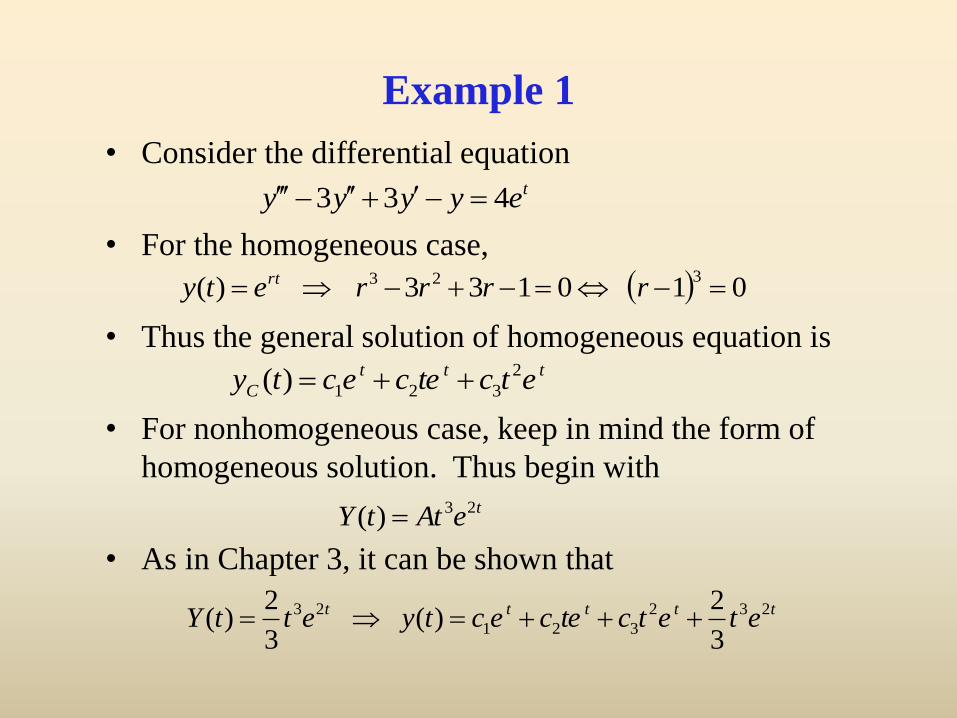
Example 1
• Consider the differential equation
• For the homogeneous case,
• Thus the general solution of homogeneous equation is
• For nonhomogeneous case, keep in mind the form of
homogeneous solution. Thus begin with
• As in Chapter 3, it can be shown that
teyyyy 433
teAttY 23)(
010133)(323 rrrrety rt
ttt
C etctececty 2
321)(
ttttt etetctecectyettY 232
321
23
3
2)(
3
2)(
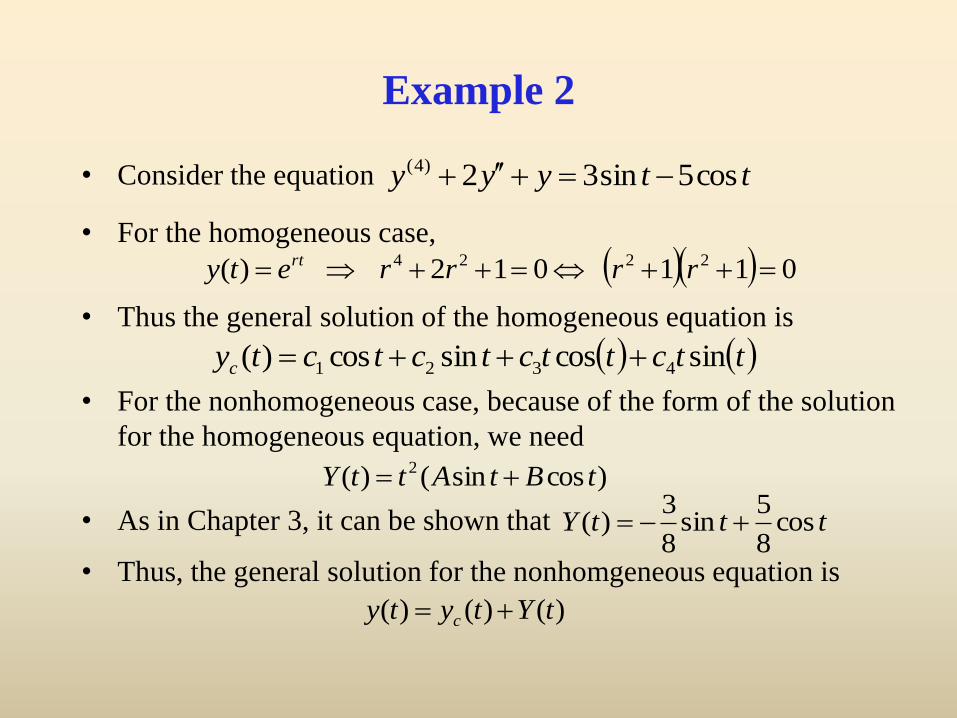
Example 2
• Consider the equation
• For the homogeneous case,
• Thus the general solution of the homogeneous equation is
• For the nonhomogeneous case, because of the form of the solution
for the homogeneous equation, we need
• As in Chapter 3, it can be shown that
• Thus, the general solution for the nonhomgeneous equation is
)cossin()( 2 tBtAttY
tttY cos8
5sin
8
3)(
ttyyy cos5sin32)4(
011012)( 2224 rrrrety rt
ttcttctctctyc sincossincos)( 4321
)()()( tYtyty c
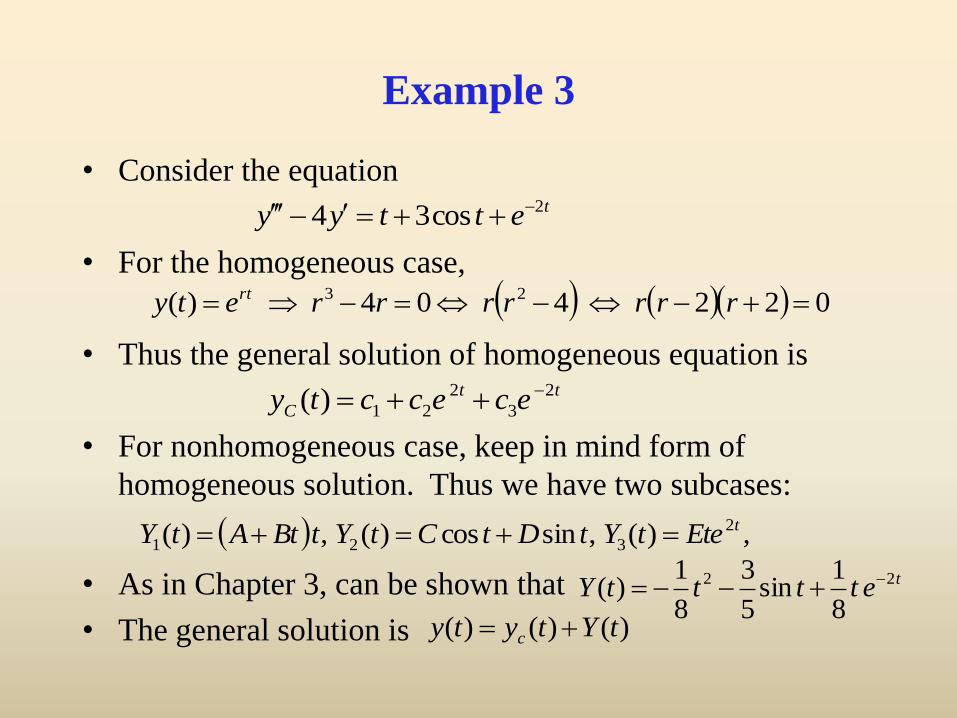
Example 3
• Consider the equation
• For the homogeneous case,
• Thus the general solution of homogeneous equation is
• For nonhomogeneous case, keep in mind form of
homogeneous solution. Thus we have two subcases:
• As in Chapter 3, can be shown that
• The general solution is
tettyy 2cos34
,)(,sincos)(,)( 2
321
tEtetYtDtCtYtBtAtY
022404)( 23 rrrrrrrety rt
tt
C ececcty 2
3
2
21)(
tettttY 22
8
1sin
5
3
8
1)(
)()()( tYtyty c
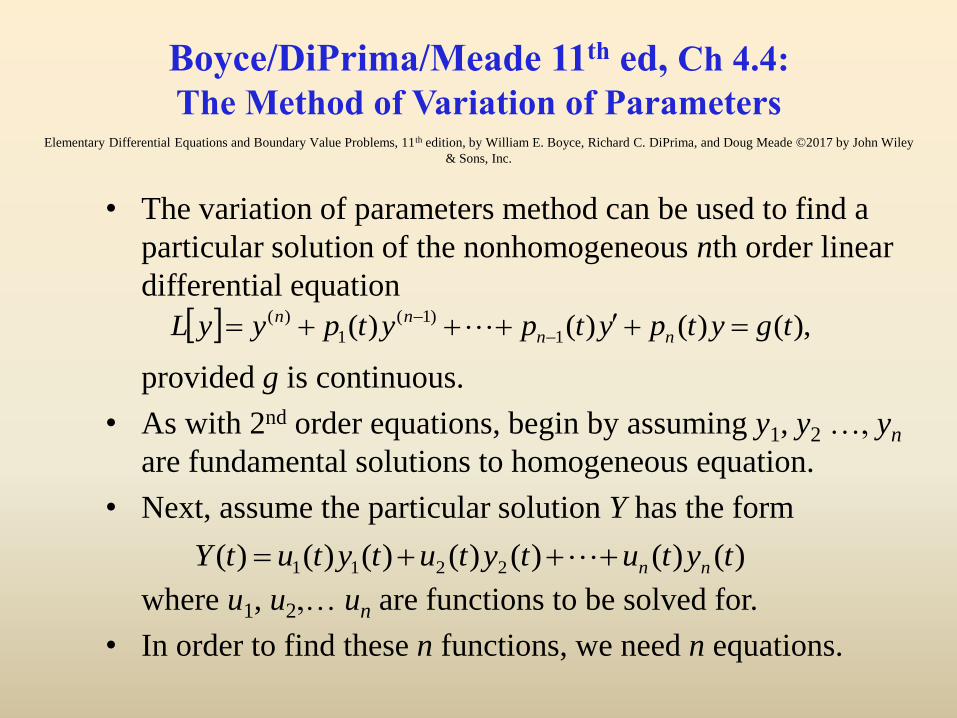
Boyce/DiPrima/Meade 11th ed, Ch 4.4:
The Method of Variation of Parameters
Elementary Differential Equations and Boundary Value Problems, 11th edition, by William E. Boyce, Richard C. DiPrima, and Doug Meade ©2017 by John Wiley
& Sons, Inc.
• The variation of parameters method can be used to find a
particular solution of the nonhomogeneous nth order linear
differential equation
provided g is continuous.
• As with 2nd order equations, begin by assuming y1, y2 …, yn
are fundamental solutions to homogeneous equation.
• Next, assume the particular solution Y has the form
where u1, u2,… un are functions to be solved for.
• In order to find these n functions, we need n equations.
),()()()( 1
)1(
1
)( tgytpytpytpyyL nn
nn
)()()()()()()( 2211 tytutytutytutY nn
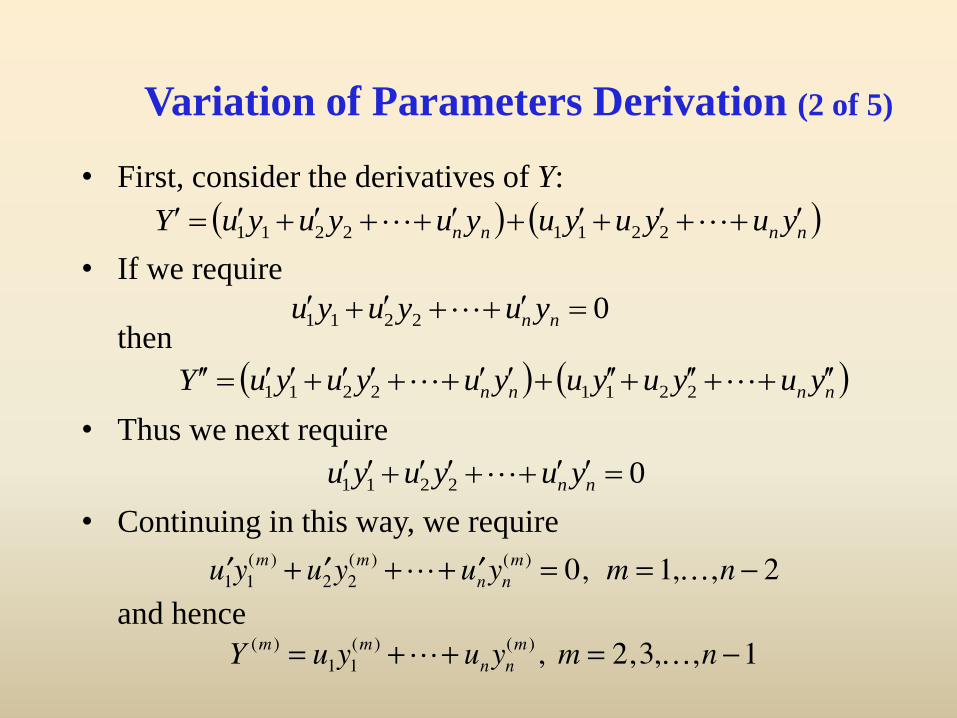
Variation of Parameters Derivation (2 of 5)
• First, consider the derivatives of Y:
• If we require
then
• Thus we next require
• Continuing in this way, we require
and hence
nnnn yuyuyuyuyuyuY 22112211
02211 nn yuyuyu
nnnn yuyuyuyuyuyuY 22112211
02211 nn yuyuyu
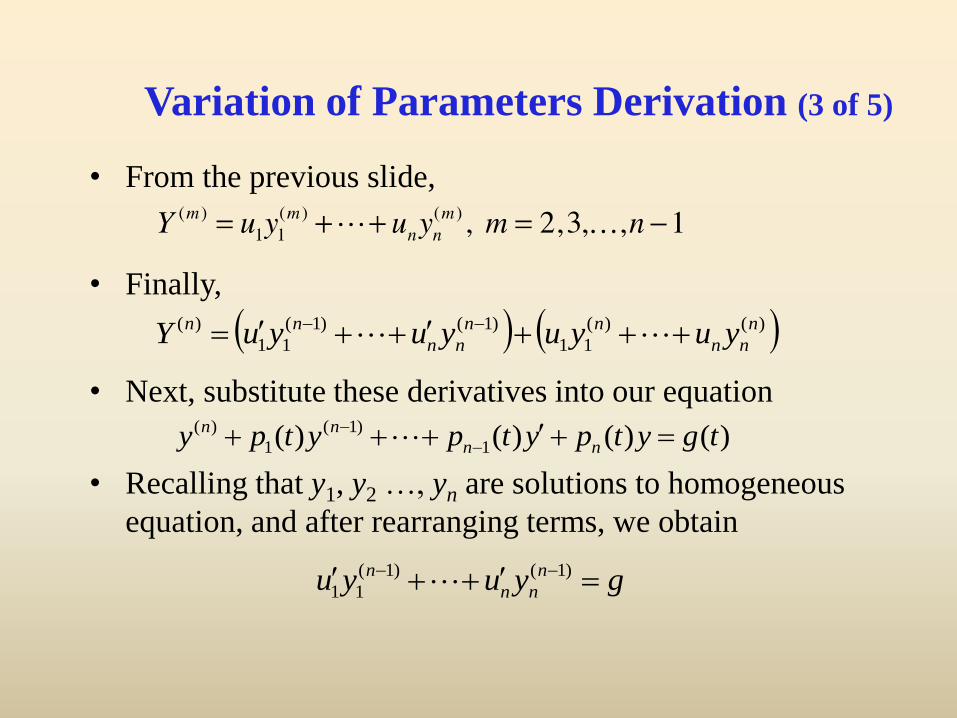
Variation of Parameters Derivation (3 of 5)
• From the previous slide,
• Finally,
• Next, substitute these derivatives into our equation
• Recalling that y1, y2 …, yn are solutions to homogeneous
equation, and after rearranging terms, we obtain
)()(
11
)1()1(
11
)( n
nn
nn
nn
nn yuyuyuyuY
gyuyu n
nn
n )1()1(
11
)()()()( 1
)1(
1
)( tgytpytpytpy nn
nn
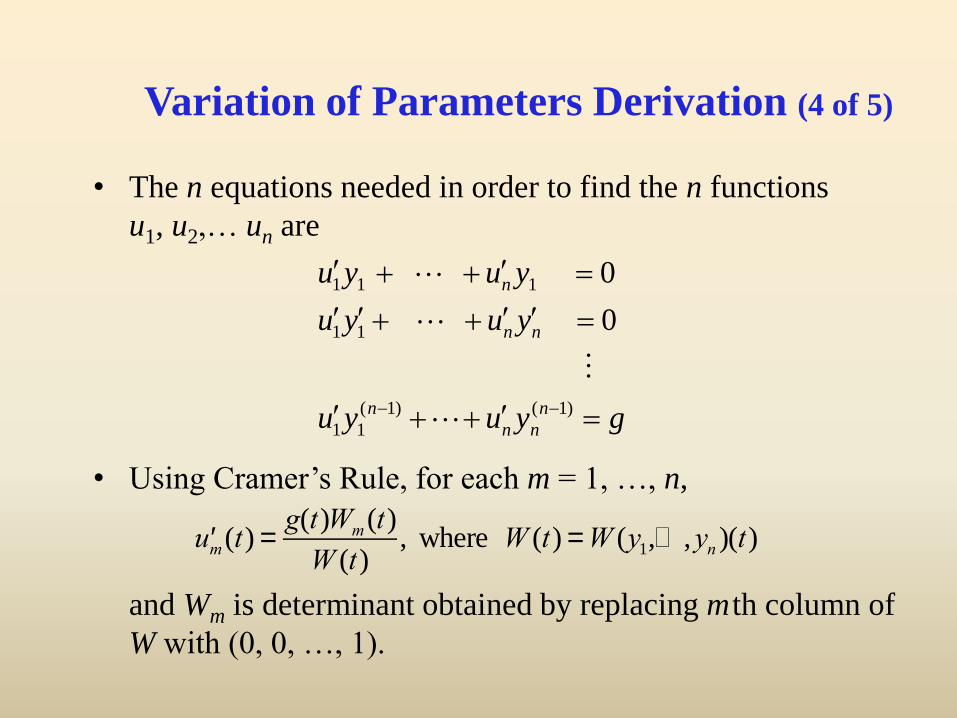
Variation of Parameters Derivation (4 of 5)
• The n equations needed in order to find the n functions
u1, u2,… un are
• Using Cramer’s Rule, for each m = 1, …, n,
and Wm is determinant obtained by replacing m th column of
W with (0, 0, …, 1).
gyuyu
yuyu
yuyu
n
nn
n
nn
n
)1()1(
11
11
111
0
0
¢um(t) =
g(t)Wm(t)
W (t), where W (t) =W (y1,… ,yn )(t)
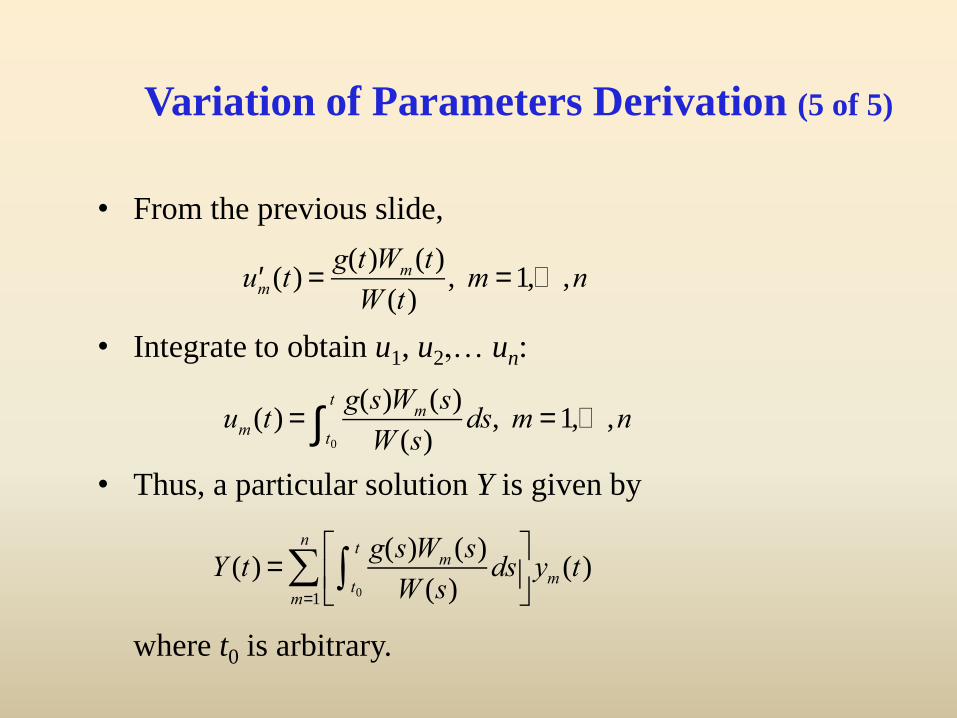
Variation of Parameters Derivation (5 of 5)
• From the previous slide,
• Integrate to obtain u1, u2,… un:
• Thus, a particular solution Y is given by
where t0 is arbitrary.
¢um(t) =
g(t)Wm(t)
W (t), m = 1,… ,n
um(t) =
g(s)Wm(s)
W (s)ds
t0
t
ò , m = 1,… ,n
Y (t) =g(s)Wm (s)
W (s)ds
t0
t
òé
ëê
ù
ûú ym (t)
m=1
n
å
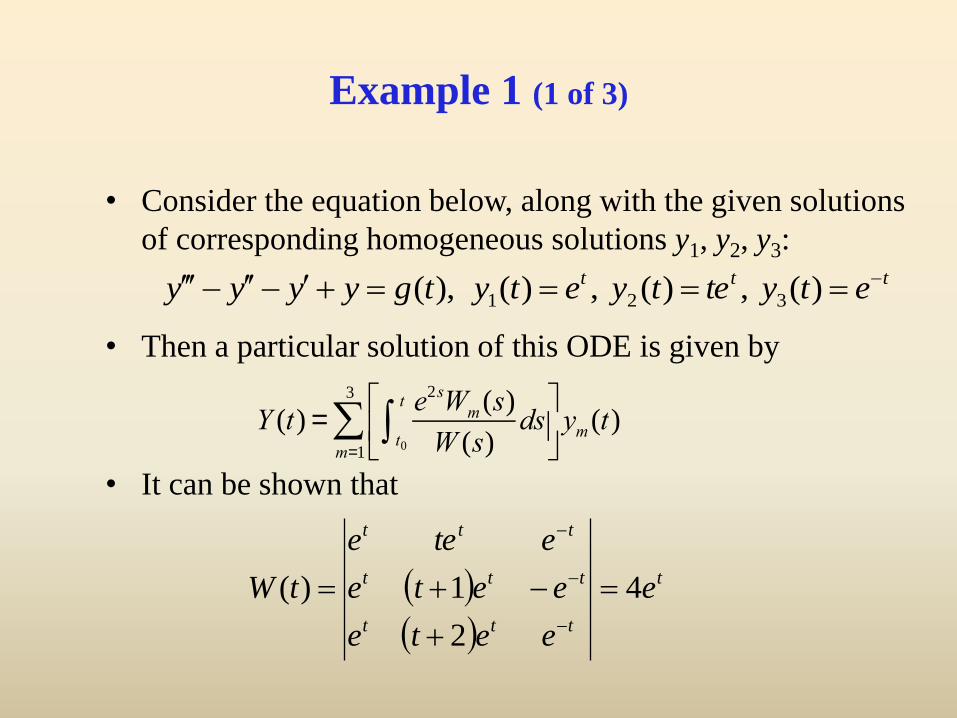
Example 1 (1 of 3)
• Consider the equation below, along with the given solutions
of corresponding homogeneous solutions y1, y2, y3:
• Then a particular solution of this ODE is given by
• It can be shown that
ttt etytetyetytgyyyy )(,)(,)(),( 321
Y (t) =e2sWm (s)
W (s)ds
t0
t
òé
ëê
ù
ûú ym (t)
m=1
3
å
t
ttt
ttt
ttt
e
eete
eete
etee
tW 4
2
1)(
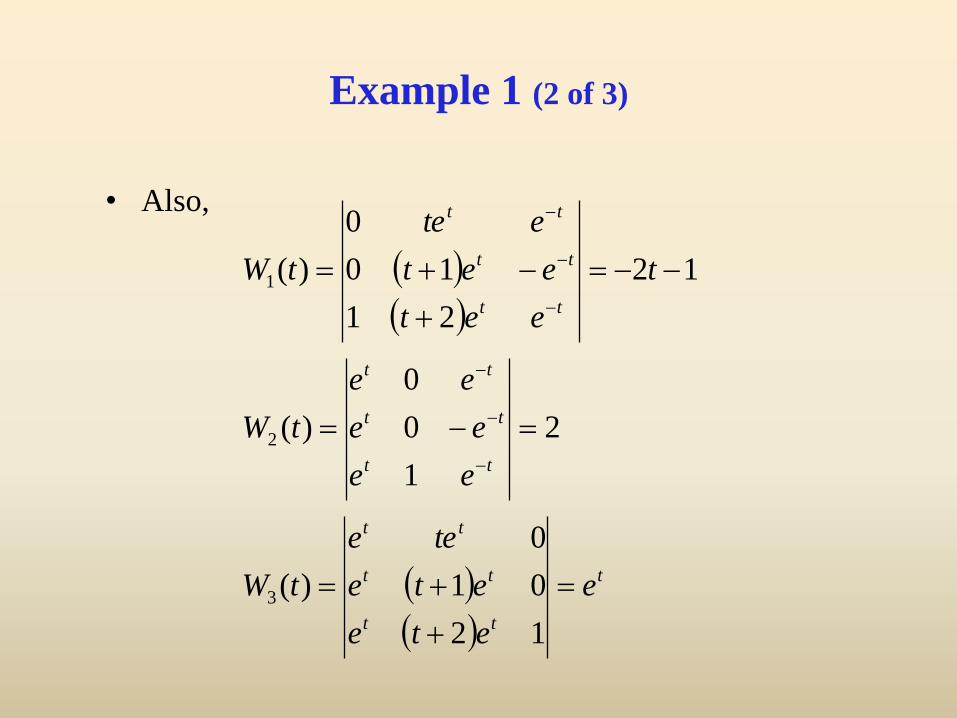
Example 1 (2 of 3)
• Also,
t
tt
tt
tt
tt
tt
tt
tt
tt
tt
e
ete
ete
tee
tW
ee
ee
ee
tW
t
eet
eet
ete
tW
12
01
0
)(
2
1
0
0
)(
12
21
10
0
)(
3
2
1
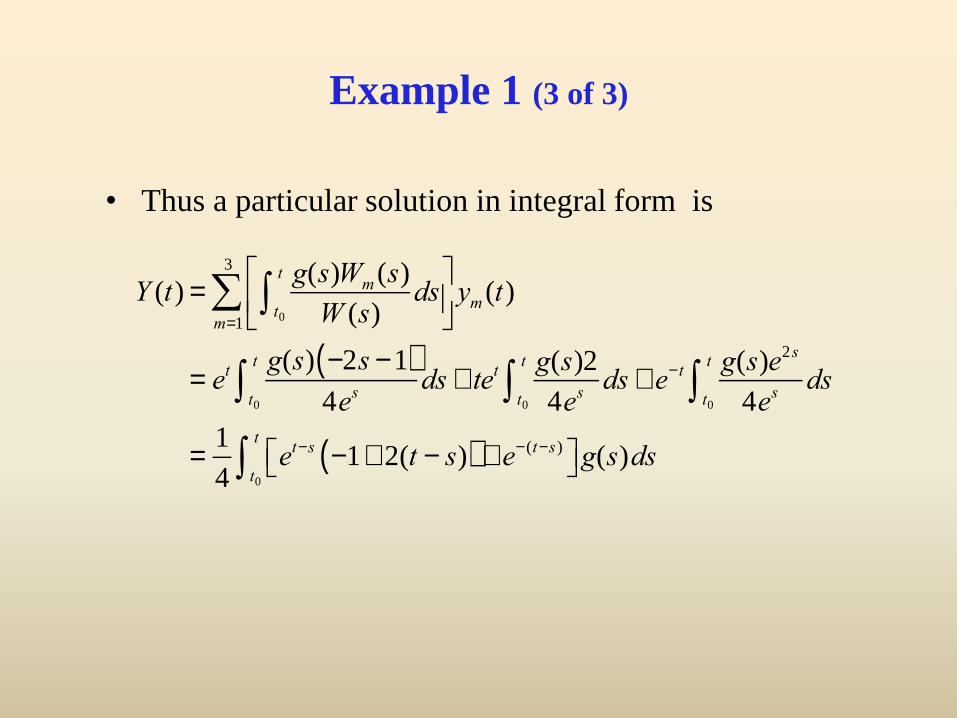
Example 1 (3 of 3)
• Thus a particular solution in integral form is
Y (t) =g(s)Wm (s)
W (s)ds
t0
t
òé
ëê
ù
ûú ym (t)
m=1
3
å
= etg(s) -2s -1( )
4esds
t0
t
ò + tetg(s)2
4esds
t0
t
ò + e-t g(s)e2s
4esds
t0
t
ò
=1
4et-s -1+ 2(t - s)( ) + e-(t-s)éë ùûg(s)ds
t0
t
ò



![INTRODUC¸AO˜ AS EQUAC¸` OES DIFERENCIAIS ORDIN˜ …satuf.net/2017_2/MAI/livro1.pdf · Este ´e um texto alternativo ao excelente livro Boyce-DiPrima [ 1] para a parte de equac¸oes](https://img.pdfslide.us/doc/110x75/5bea9b7f09d3f28d5d8bad2b/introducao-as-equac-oes-diferenciais-ordin-satufnet20172mai-este.jpg)


















![[William E. Boyce, Richard C. DiPrima] Elementary (BookZZ.org)](https://img.pdfslide.us/doc/110x75/55cf9326550346f57b9c2ea7/william-e-boyce-richard-c-diprima-elementary-bookzzorg.jpg)






