Embed Size (px)
Citation preview
Fast 3D Viscous Calculation Methods
Mark DrelaMIT Aero & Astro
Boeing/MIT Strategic Research Review6 May 14

Motivation
2D Inviscid+Integral-BL (IBL) methods have proven very effective
• Enormously faster than alternative Navier-Stokes for similar accuracy
• Can exploit any inviscid flow solver
• Compatible with inverse design methods
• Compatible with virtual displacements for linearized aeroelasticity
Navier Stokes
∼ 500 000 variables∼ 1 hr. runtime
Potential+BL (MSIS, TRANAIR-2D)
∼ 5 000 variables∼ 1 sec. runtime
⇒ Present goal is to extend inviscid+integral-BL methods to 3D
1/23

EIF/Defect Formulation
• Real flow decomposed into irrotational Equivalent Inviscid Flow qi
and rotational Viscous Defect ∆q, with . . .
– qi = q outside the rotational viscous layers
– qi · n 6= 0 on solid walls, accounts for presence of viscous layer
(qi is not the solution to the inviscid problem!)
RealViscous Flow i
( )r
( )r
( )rq
q
q∆ qi q−
EIF
Viscous Defect
iq n 0.EIF Wall BC:
qi q=
q = 0Wall BC:( EIF wall mass flux depends on integrated defect )
nn
• Originally employed by LeBalleur with boundary layer methods,but EIF/Defect formulation does not depend on BL approximations
2/23
EIF/Defect Formulation
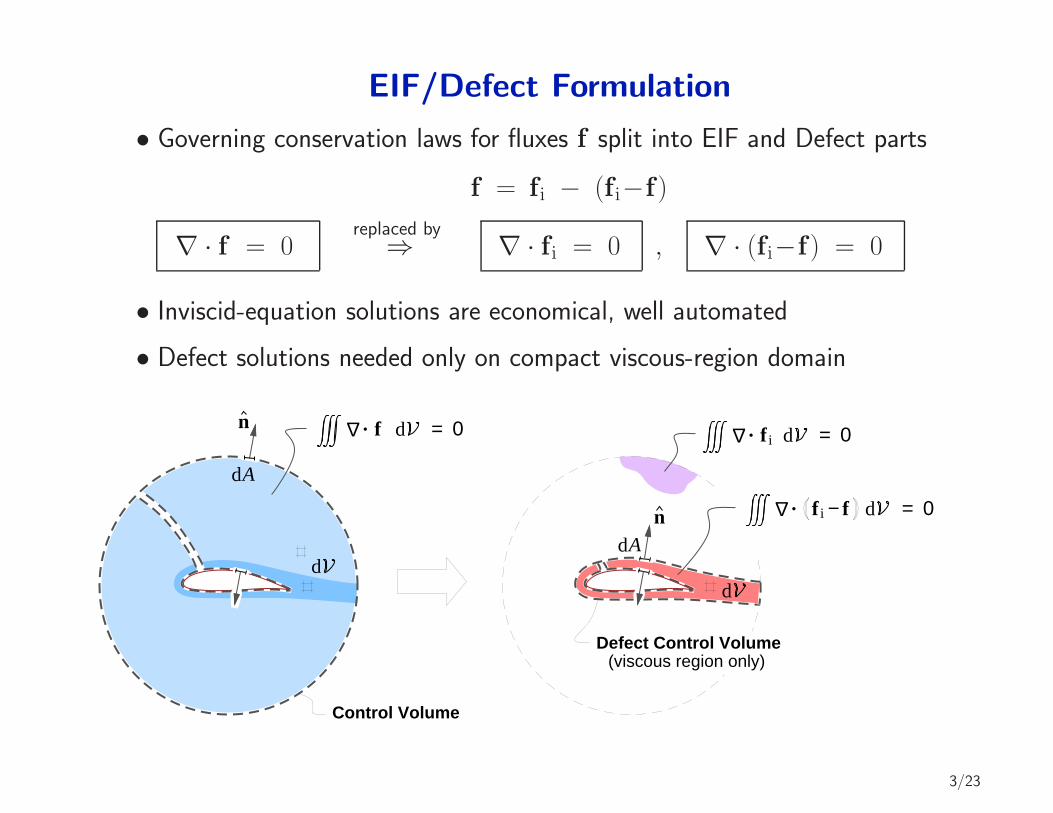
• Governing conservation laws for fluxes f split into EIF and Defect parts
f = fi − (fi−f)
∇ · f = 0replaced by
⇒ ∇ · fi = 0 , ∇ · (fi−f) = 0
• Inviscid-equation solutions are economical, well automated
• Defect solutions needed only on compact viscous-region domain
Control Volume
Defect Control Volume(viscous region only)
n
n
dd
Ad
Ad
. f d
∆ = 0
. −i ff d
∆ = 0
. f
∆ = 0i d
3/23

EIF/Defect Formulation
Defect conservation law on differential volume spanning viscous layer
∫∫∫∇· (fi−f) dV =
∫∫ ˜∇ ·[∫ yeyw
(
f i− f)
dy]
dx dz
+∫∫(fi−f)e · ne dAe
−∫∫(fi−f)w · nw dAw = 0
where f = fx x + fz z (in-plane flux)˜∇() = ∂()
∂x x + ∂()∂z z (in-plane gradient)
Defect Control Volume
Differential Defect Control Volume
...
... ...
......... ...
...
exit
n
n
y ( )x,ze
y ( )x,zw
ne
nw
w
e
A
x
Ad
d
d
dz
y,υ
x,z , u,w
4/23

Defect EquationsDefect equations on differential volumes spanning viscous layer
∫(mass i − mass) dy → ˜∇·M− ρiwqiw·nw = 0
∫(momi−mom) dy → ˜∇· ¯J − ˜∇·Mqiw − τw − (piw−pw)nw + ˜∇Π = 0
∫(qi · momi−q · mom) dy → ˜∇·E − ˜∇·M q2iw − ρiQ· ˜∇q2i − 2D = 0
∫(qi×momi−q×mom)·y dy → ˜∇·E◦− ˜∇·M q2iwψiw − ρiQ
◦· ˜∇q2i . . .− 2D◦ = 0
Conserved integral defects (fluxes), source terms
M ≡∫(ρiqi − ρq) dy Mass flux defect
¯J ≡∫(ρiqi q
Ti − ρqqT) dy Momentum flux defect
E ≡∫(ρiqi q
2i − ρq q2) dy K.E. flux defect
E◦ ≡∫(ρiqi q
2i ψi − ρq q2ψ) dy Curvature flux defect
Q ≡∫(qi − q) dy Volume flux defect
Π ≡∫(pi − p) dy Pressure defect
D ≡∫( ¯τ ·∇) · q dy Dissipation integral
...
iqρiqρ
iq n.ρwiw w
M J E, , E, ...=τττw
In-plane flow angle variable: ψ(y) ≡ arctan(w/u)5/23
Attractive Features of Defect Formulation
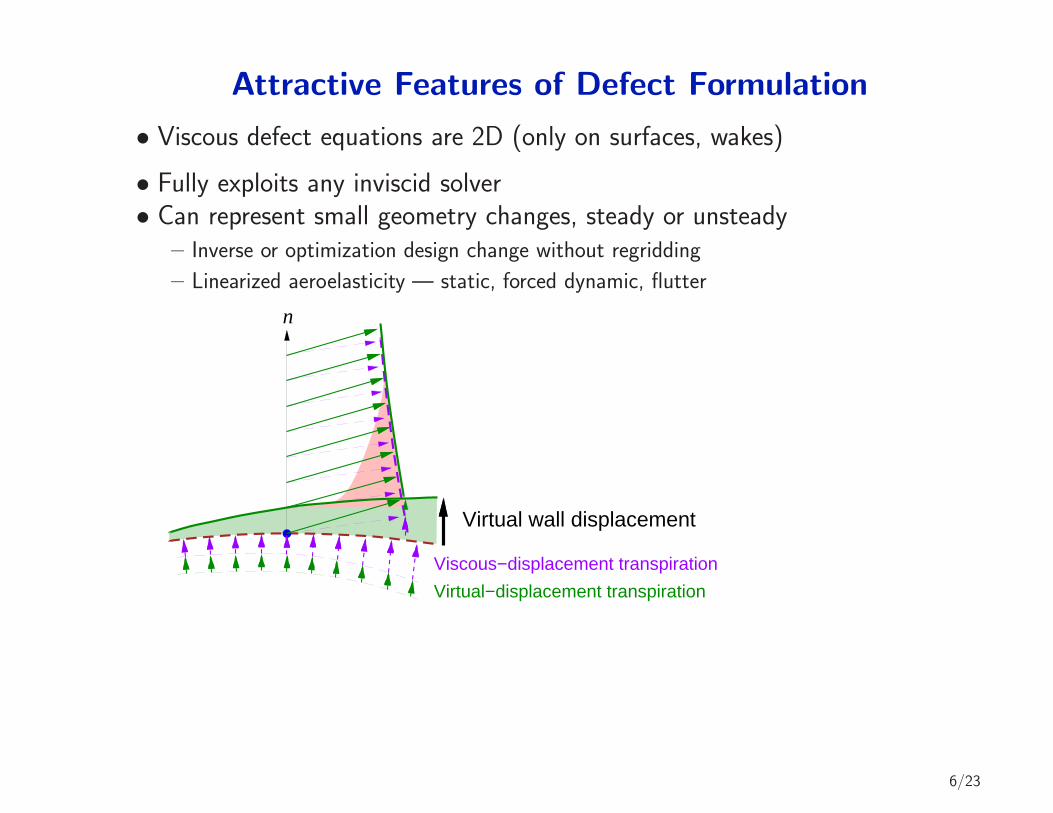
• Viscous defect equations are 2D (only on surfaces, wakes)
• Fully exploits any inviscid solver• Can represent small geometry changes, steady or unsteady
– Inverse or optimization design change without regridding
– Linearized aeroelasticity — static, forced dynamic, flutter
n
Virtual wall displacement
Virtual−displacement transpiration
Viscous−displacement transpiration
6/23
Central Ideas of Present Work
• Assume EIF is represented by any fast inviscid formulation . . .
– Vortex Lattice (AVL)
– Panel (PANAIR, PMARC, QUADPAN, etc.)
– Transonic Small Disturbance Potential
– Full Potential (TRANAIR)
– Euler (CART-3D, etc.)
• Develop complementary “surface-only” method (IBL3)to represent Viscous Defect for any EIF formulation
• Use modern sparse-matrix methods (ILU, GMRES . . . )to solve overall EIF+Defect problem
7/23

IBL3 Formulation
• Viscous defects represented by assumed profiles, parameterized by
δ A B Ψ (roughly equivalent to δ∗1 θ11 δ∗2 θ12)
• TS, CF-wave amplitudes and Reynolds stresses parameterized by
GC ψC
(
equivalent to ln[
u′12+u′2
2]
, arctan[
‖u′2‖/‖u′1‖
])
• Enormous reduction in number of unknowns from RANS
n
Viscous Defects(mass, mom., KE)
Navier Stokes
RealViscous Flow
i
Potential solvergrid resolutionrequired for( )rq q
i( )rq
EIF
δ Ψρ ρq ρe( ) j
j
Typical required Navier−Stokes grid resolution
6 DOFs per surface point
ν
200 to 600 DOFs per surface point
IBL3
ψGC C
8/23
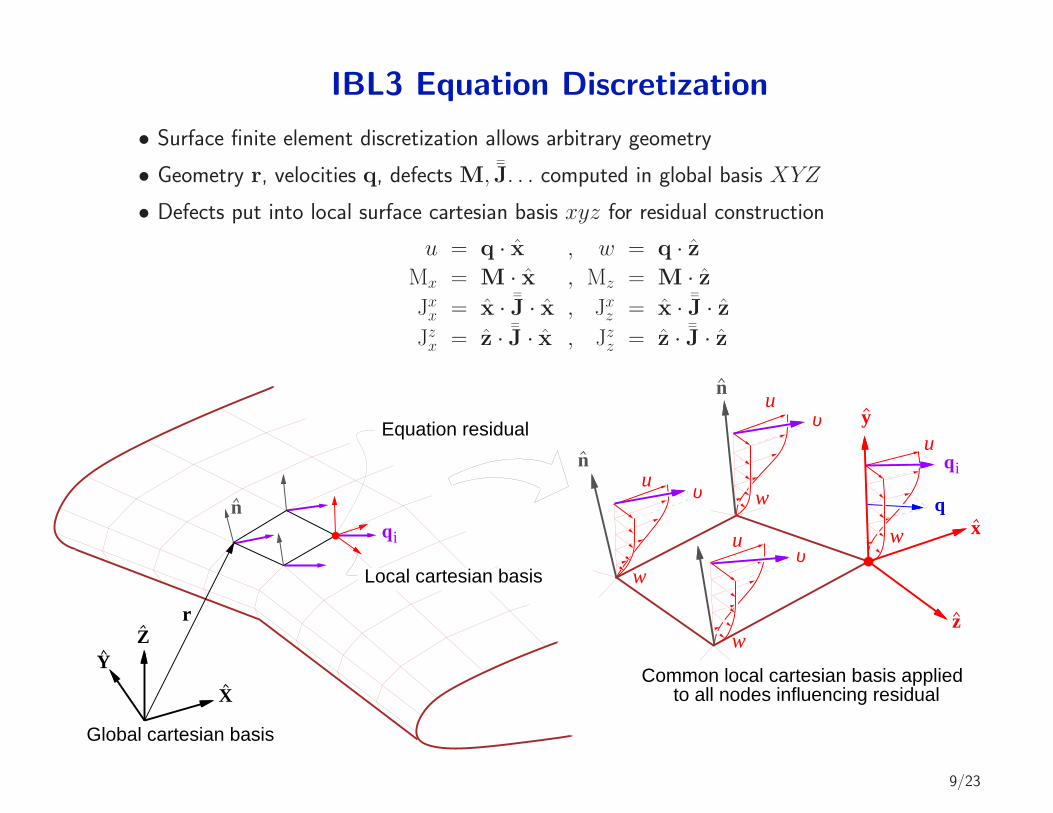
IBL3 Equation Discretization
• Surface finite element discretization allows arbitrary geometry
• Geometry r, velocities q, defects M, ¯J. . . computed in global basis XYZ
• Defects put into local surface cartesian basis xyz for residual construction
u = q · x , w = q · z
Mx = M · x , Mz = M · z
Jxx = x · ¯J · x , Jxz = x · ¯J · z
Jzx = z · ¯J · x , Jzz = z · ¯J · z
X
ZY
Global cartesian basis
Local cartesian basis
r
u
w x
z
q
q
i
y
n
n
u
w
w
u
u
w
qi
nυ
υ
υEquation residual
Common local cartesian basis applied to all nodes influencing residual
9/23

IBL3 Solution Approach
Finite-element discretization in local surface xyz basis
• Greatly simplified solution logic – no need to identify attachment lines, stag-nation points
• Simple Dirichlet, Neumann PCs – no edge stencils needed
• Compatible with simultaneous solution with inviscid flow
N
NN
N
−1+1 −1
+1
1
2
3
4
ζ ξ
ζ
ξ
x
z
ξ
ζ1 2
34
n
n
iW iW
iW
n
n
nS
S
S
S
S
10/23
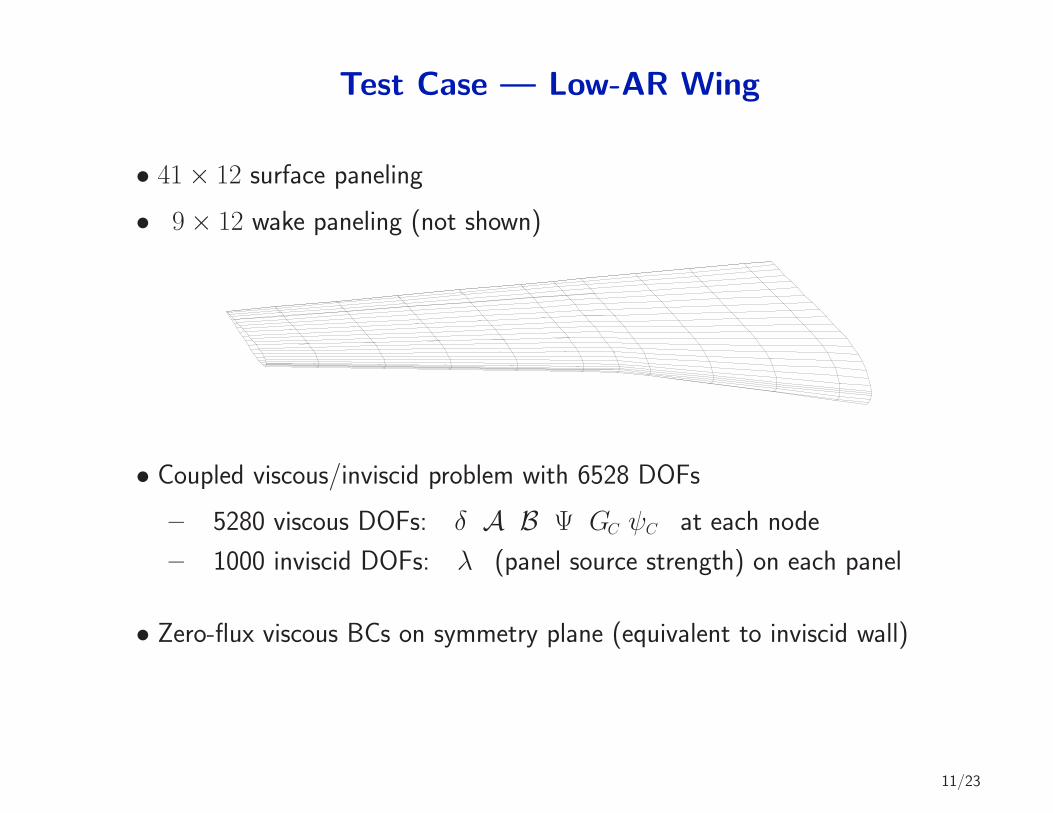
Test Case — Low-AR Wing
• 41× 12 surface paneling
• 9× 12 wake paneling (not shown)
• Coupled viscous/inviscid problem with 6528 DOFs
– 5280 viscous DOFs: δ A B Ψ GC ψC at each node
– 1000 inviscid DOFs: λ (panel source strength) on each panel
• Zero-flux viscous BCs on symmetry plane (equivalent to inviscid wall)
11/23

Test Case — Low-AR Wing
EIF and wall streamlines for laminar flow at Re = 40 000
α = 0.0° EIF streamlines
Skin friction lines
α = 4.0°
57% span
EIF streamlines
Skin friction lines
⇒ Separation lines are naturally captured within IBL3 surface grid
12/23
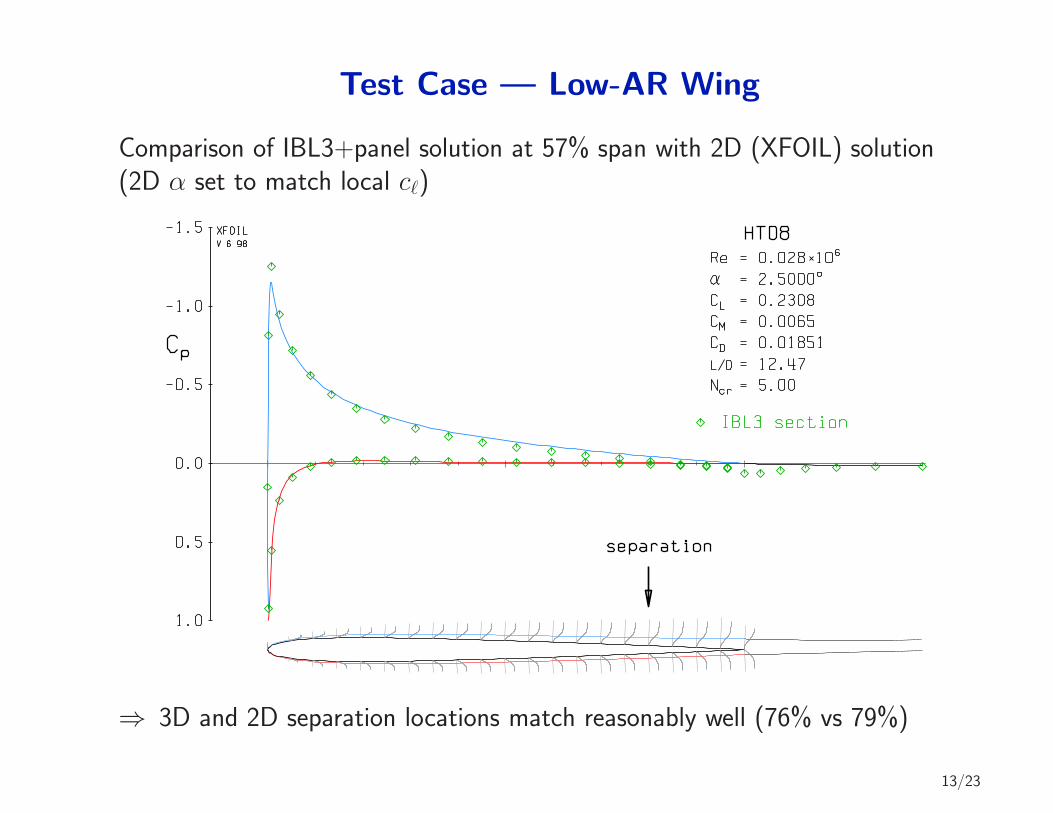
Test Case — Low-AR Wing
Comparison of IBL3+panel solution at 57% span with 2D (XFOIL) solution(2D α set to match local cℓ)
⇒ 3D and 2D separation locations match reasonably well (76% vs 79%)
13/23
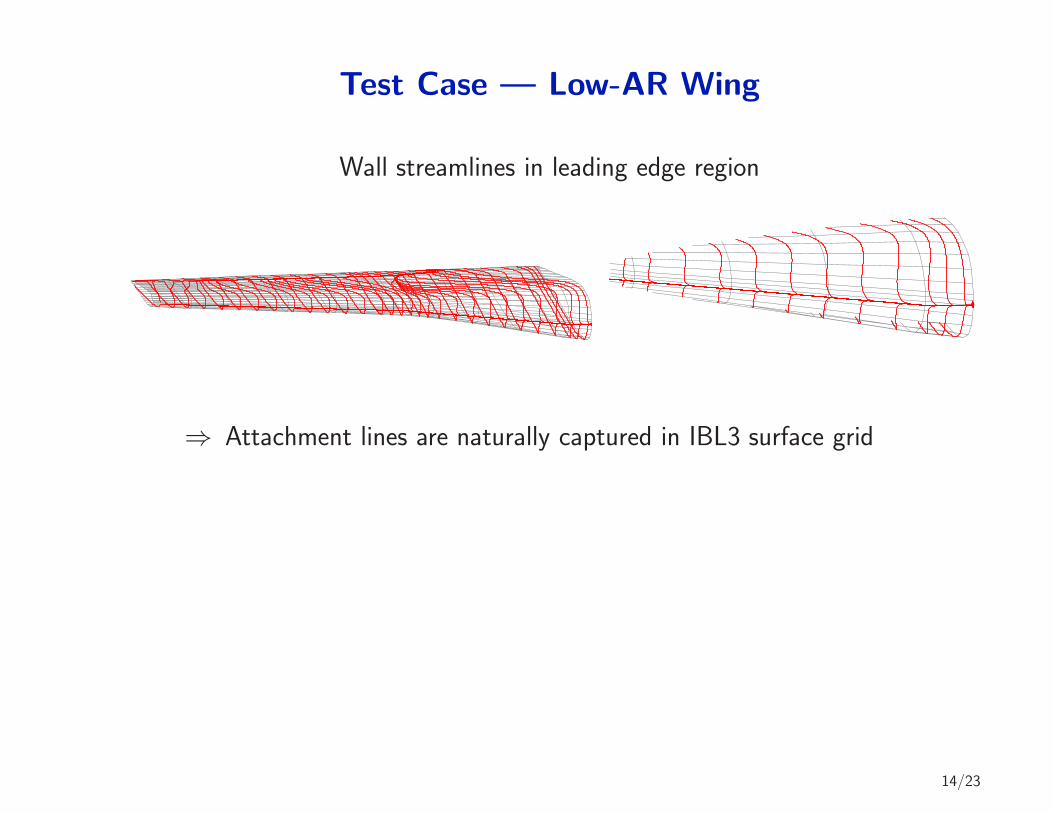
Test Case — Low-AR Wing
Wall streamlines in leading edge region
⇒ Attachment lines are naturally captured in IBL3 surface grid
14/23
Combined transition-prediction / turbulence-lag treatment
Reynolds shear stress coefficients:
Cτ1 ≡−u′1v
′
qi, Cτ2 ≡
−u′2v′
qi
Reynolds stress magnitude, angle variables:
GC ≡ lnCτ = ln(C2τ1+C2
τ2
)1/2
ψC ≡ arctanCτ2Cτ1
Governing equations:∂GC
∂t+ qc ·
˜∇GC = fG
∂ψC
∂t+ qc ·
˜∇ψC = fψ
Source functions fG, fψ model:
– laminar TS,CF wave growth for Cτ < Cτcrit– turbulence evolution, lags for Cτ > Cτcrit
15/23

Torpedo Test Case
“Torpedo” over a wall boundary layer
qSourceLeading edge
"Torpedo"
"Torpedo"
Computational grid
Side View
Inflow edge
Inflow edge
Outflow edge
16/23
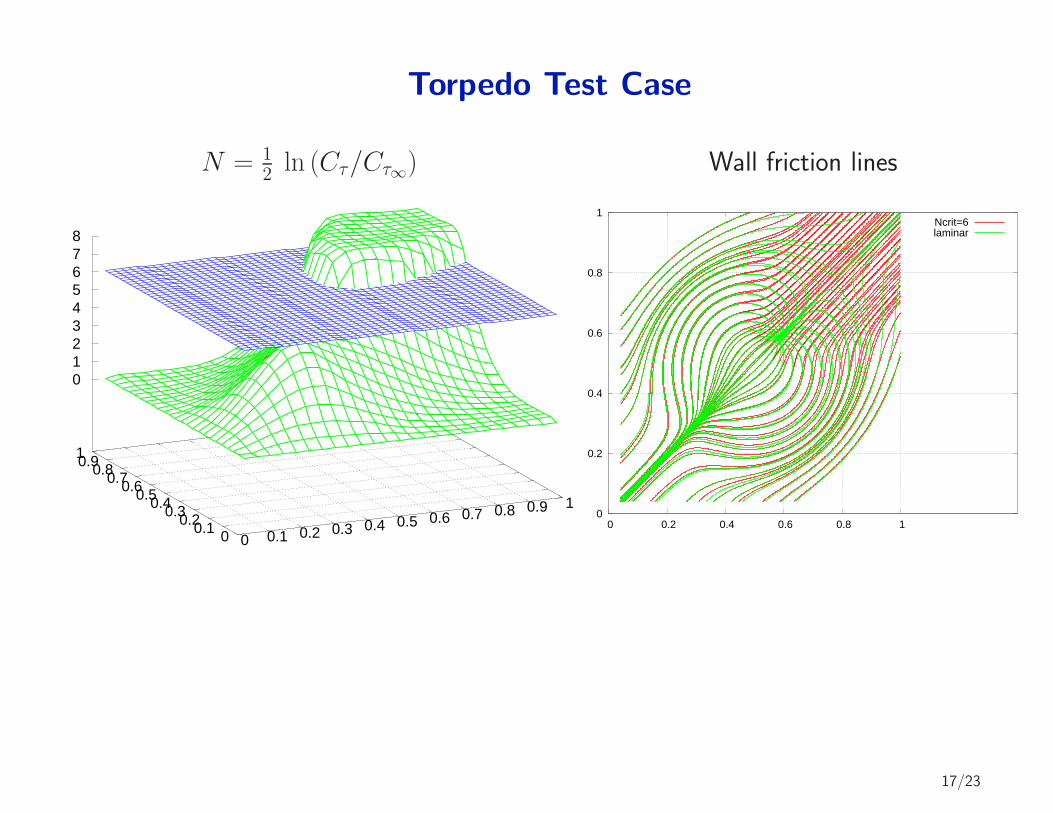
Torpedo Test Case
N = 12 ln (Cτ/Cτ∞) Wall friction lines
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 1 2 3 4 5 6 7 8
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
Ncrit=6laminar
17/23
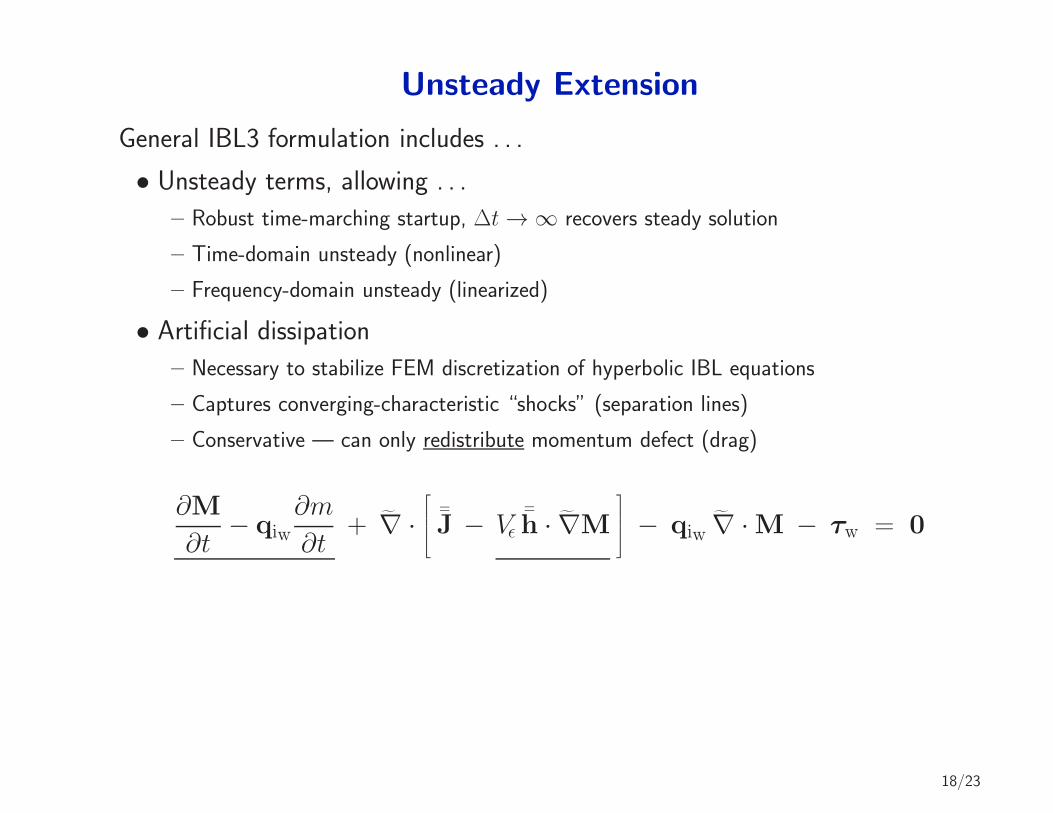
Unsteady Extension
General IBL3 formulation includes . . .
• Unsteady terms, allowing . . .
– Robust time-marching startup, ∆t→ ∞ recovers steady solution
– Time-domain unsteady (nonlinear)
– Frequency-domain unsteady (linearized)
• Artificial dissipation
– Necessary to stabilize FEM discretization of hyperbolic IBL equations
– Captures converging-characteristic “shocks” (separation lines)
– Conservative — can only redistribute momentum defect (drag)
∂M
∂t− qiw
∂m
∂t+ ˜∇ ·
¯J − Vǫ
¯h · ˜∇M
− qiw
˜∇ ·M − τw = 0
18/23
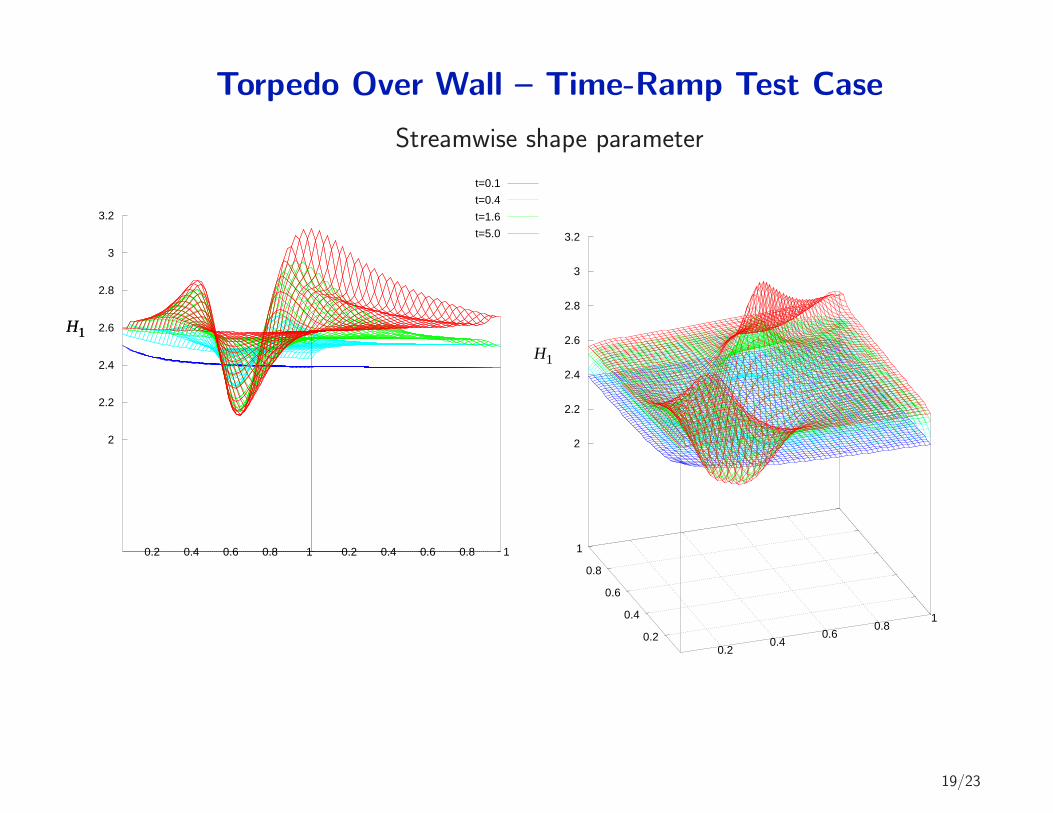
Torpedo Over Wall – Time-Ramp Test Case
Streamwise shape parameter
0.2 0.4 0.6 0.8 1 0.2 0.4 0.6 0.8 1
2
2.2
2.4
2.6
2.8
3
3.2
H1
t=0.1
t=0.4
t=1.6
t=5.0
H1
0.2 0.4
0.6 0.8
1
0.2
0.4
0.6
0.8
1
2
2.2
2.4
2.6
2.8
3
3.2
H1
19/23
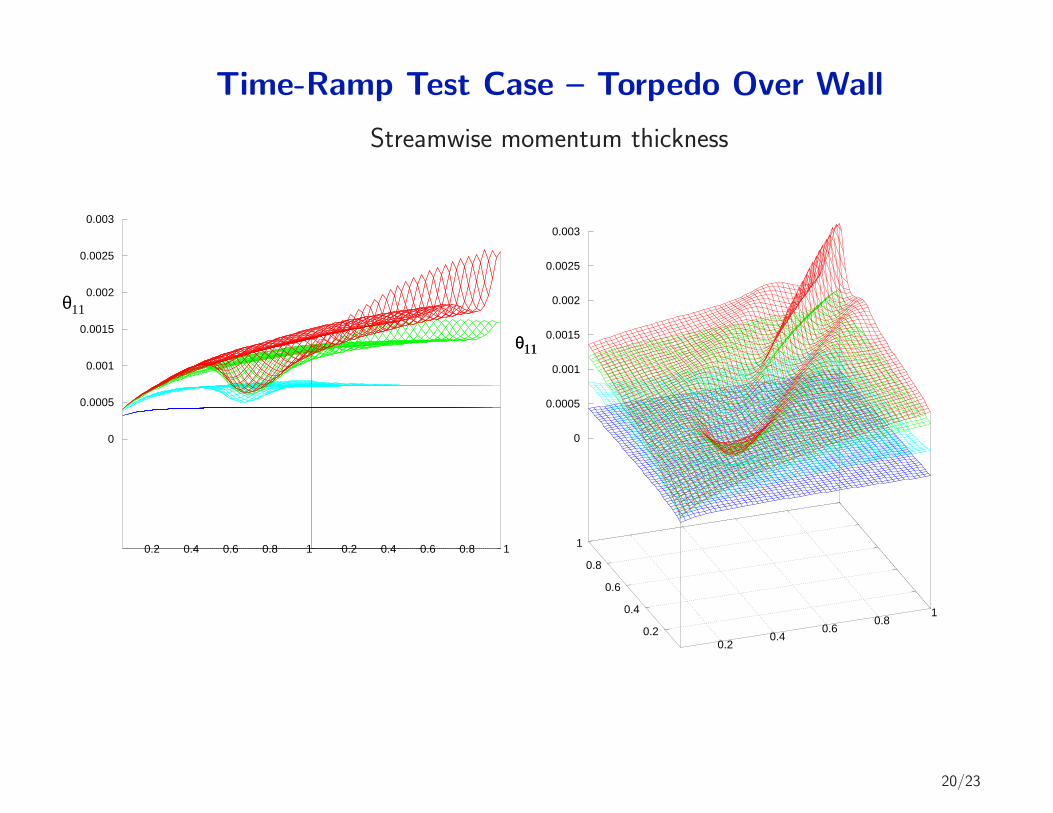
Time-Ramp Test Case – Torpedo Over Wall
Streamwise momentum thickness
0.2 0.4 0.6 0.8 1 0.2 0.4 0.6 0.8 1
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
θ11
0.2 0.4
0.6 0.8
1
0.2
0.4
0.6
0.8
1
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
θ11θ11
20/23
IBL3 Work Done to Date
• Development of FE discretization on general surface grids
• Full unsteady implementation
• Laminar closure method
• Envelope-eN 3D transition prediction method
• Development of turbulent closure method
• Combined laminar/transition/turbulent method
• IBL3 1.01 Routine Package, Documentation
• Strong coupling with simple inviscid solver (done)
• Paper: “Three-Dimensional Integral Boundary Layer Formulation for GeneralConfigurations”, 21st AIAA CFD Conference, San Diego, June 2013.
21/23
IBL3 Work Underway or Planned
• Continue testing, calibration
• Better wake treatment
• Implementation into TSD code (Drela, Sato)
• Implementation into TRANAIR (by Boeing)
22/23

People
• MIT:
– Mark Drela (IBL3, EIF coupling)
– PhD student David Moro (VGNS)
– Bob Haimes (geometry)
• Boeing:
– Dave Young & TRANAIR group
– Sho Sato (TSD code)
23/23





























