Embed Size (px)
Citation preview
© ABBSlide 1October 2, 2015
Risk Assessment for Human-Robot CollaborativeApplicationsWorkshop IROS 2015 –Physical Human-Robot Collaboration: Safety, Control, Learning andApplications
Björn Matthias, ABB Corporate Research, 2015-10-02
© ABBSlide 2October 2, 2015
Risk Assessment for HRC Applications
§ Motivation for collaborative robots
§ Working situation – humans and collaborativerobots
§ Risk assessment basics
§ Requirements on a collaborative robot forpower-and-force-limited operation
§ Asimovà FRIDAà DACRà YuMi
§ Characteristics of YuMi
§ Example YuMi application – risk assessment
§ Summary and outlook
Overview
© ABBSlide 3October 2, 2015
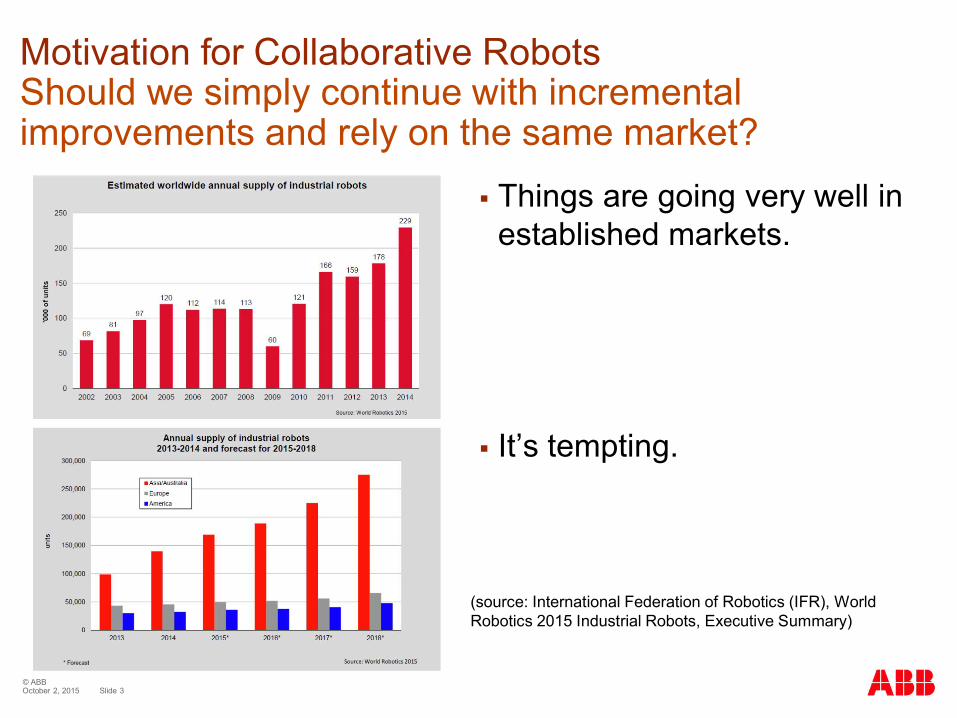
Motivation for Collaborative Robots
§ Things are going very well inestablished markets.
§ It’s tempting.
Should we simply continue with incrementalimprovements and rely on the same market?
(source: International Federation of Robotics (IFR), WorldRobotics 2015 Industrial Robots, Executive Summary)
© ABBSlide 4October 2, 2015
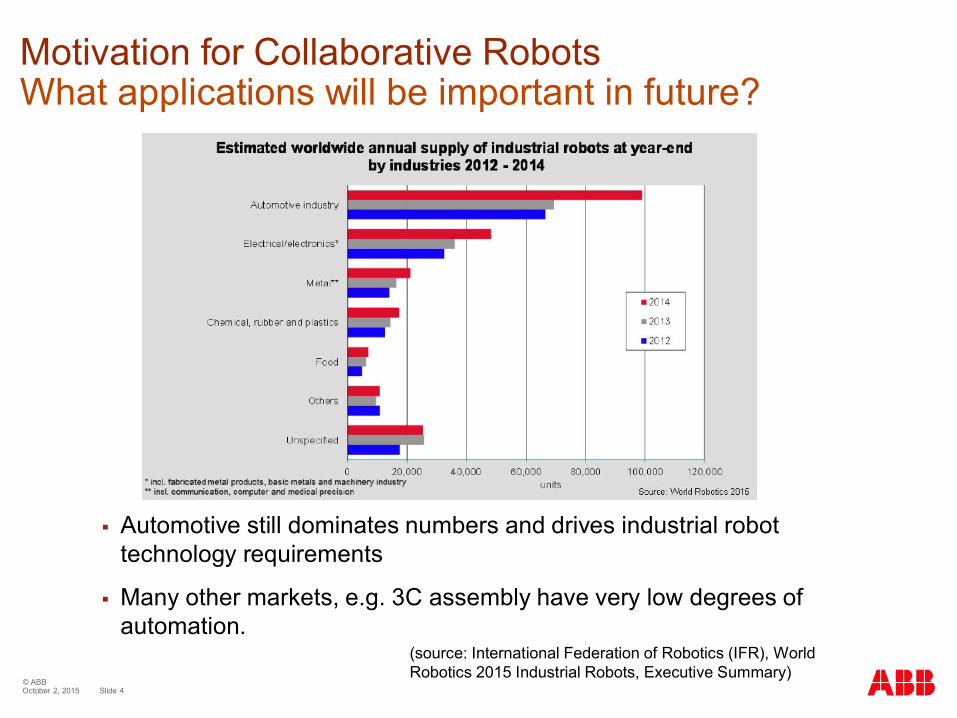
Motivation for Collaborative Robots
§ Automotive still dominates numbers and drives industrial robottechnology requirements
§ Many other markets, e.g. 3C assembly have very low degrees ofautomation.
What applications will be important in future?
(source: International Federation of Robotics (IFR), WorldRobotics 2015 Industrial Robots, Executive Summary)
© ABBSlide 5October 2, 2015
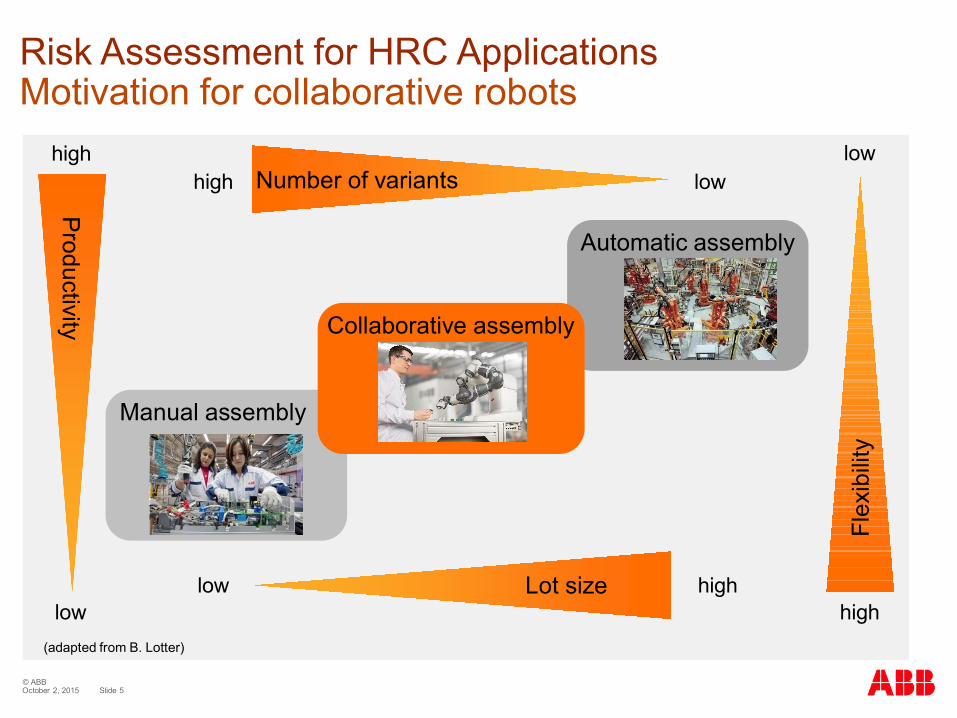
Risk Assessment for HRC ApplicationsMotivation for collaborative robots
(adapted from B. Lotter)
Number of variants lowhigh
Lot size highlow
Flex
ibilit
y
low
high
Productivity
low
high
Automatic assembly
Manual assembly
Collaborative assembly
© ABBSlide 6October 2, 2015
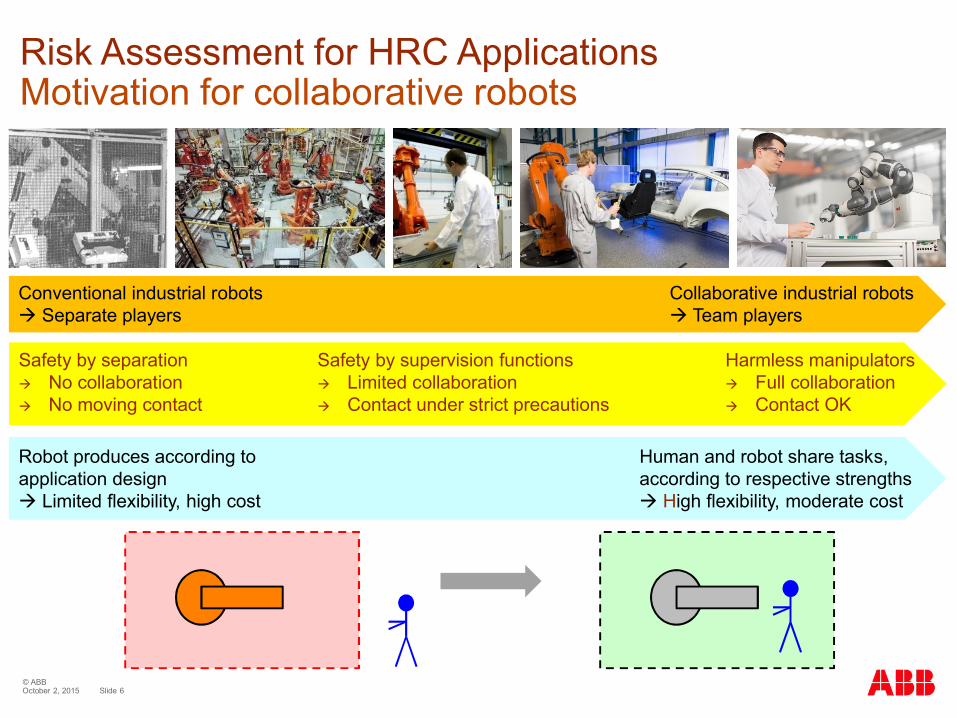
Risk Assessment for HRC ApplicationsMotivation for collaborative robots
Conventional industrial robotsà Separate players
Collaborative industrial robotsà Team players
Safety by separationà No collaborationà No moving contact
Safety by supervision functionsà Limited collaborationà Contact under strict precautions
Harmless manipulatorsà Full collaborationà Contact OK
Robot produces according toapplication designà Limited flexibility, high cost
Human and robot share tasks,according to respective strengthsà High flexibility, moderate cost
© ABBSlide 7October 2, 2015
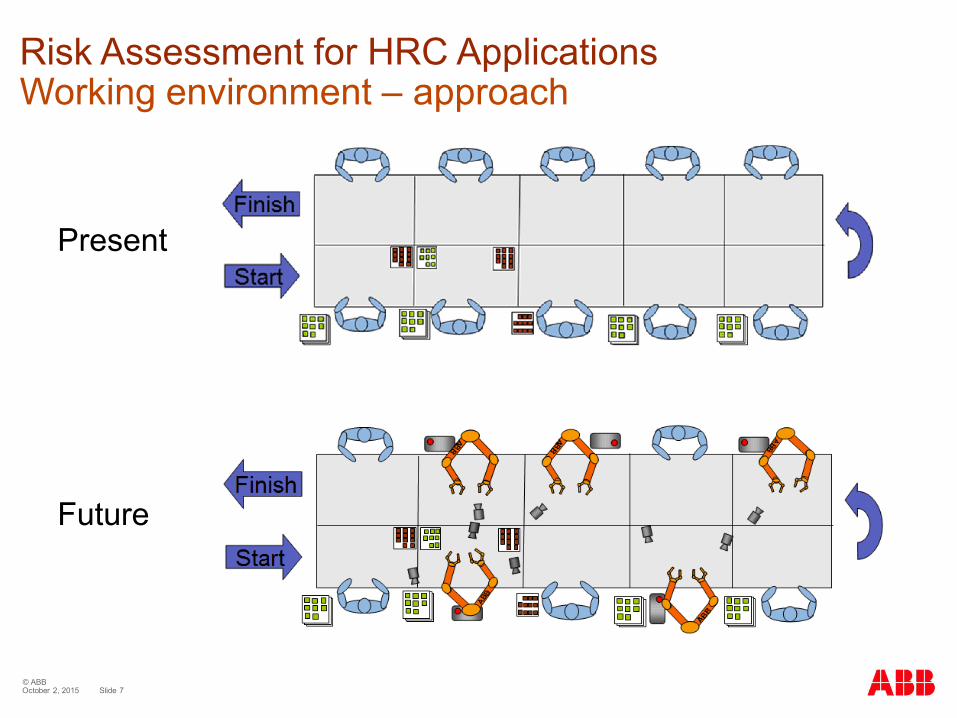
Risk Assessment for HRC ApplicationsWorking environment – approach
Present
Future
© ABBSlide 8October 2, 2015
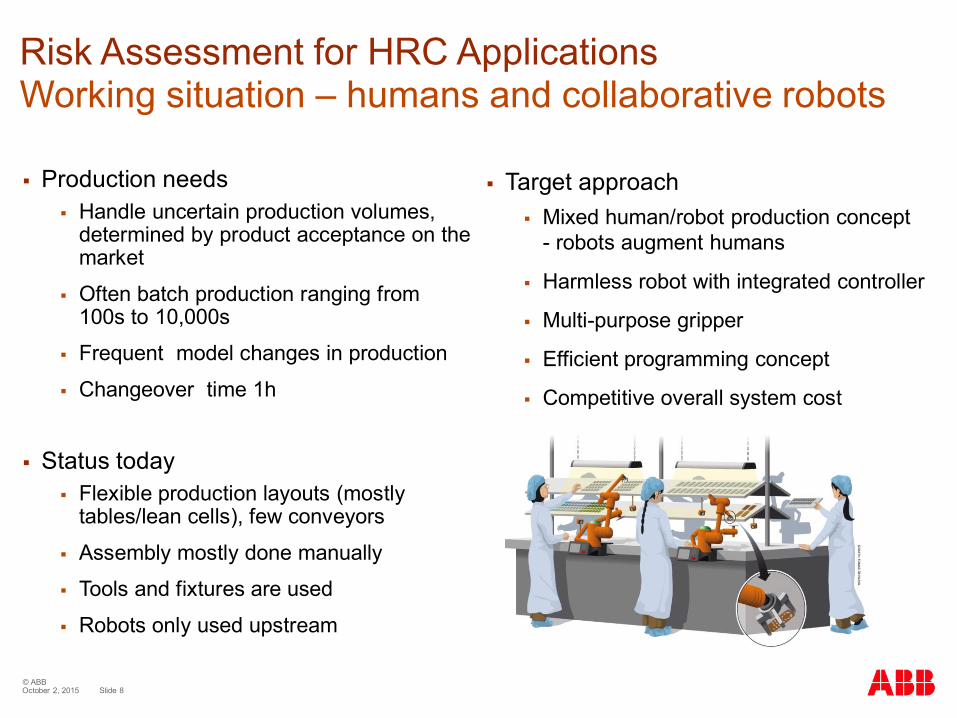
Risk Assessment for HRC Applications
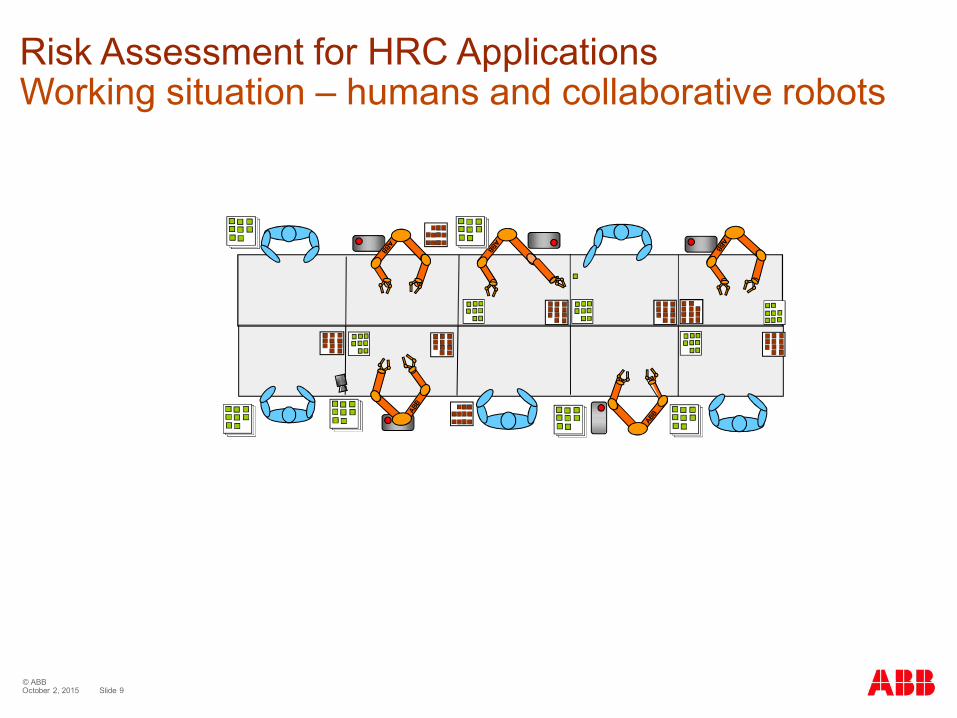
§ Production needs§ Handle uncertain production volumes,
determined by product acceptance on themarket
§ Often batch production ranging from100s to 10,000s
§ Frequent model changes in production
§ Changeover time 1h
§ Status today§ Flexible production layouts (mostly
tables/lean cells), few conveyors
§ Assembly mostly done manually
§ Tools and fixtures are used
§ Robots only used upstream
§ Target approach§ Mixed human/robot production concept
- robots augment humans
§ Harmless robot with integrated controller
§ Multi-purpose gripper
§ Efficient programming concept
§ Competitive overall system cost
Working situation – humans and collaborative robots
© ABBSlide 9October 2, 2015
Risk Assessment for HRC ApplicationsWorking situation – humans and collaborative robots
© ABBSlide 10October 2, 2015
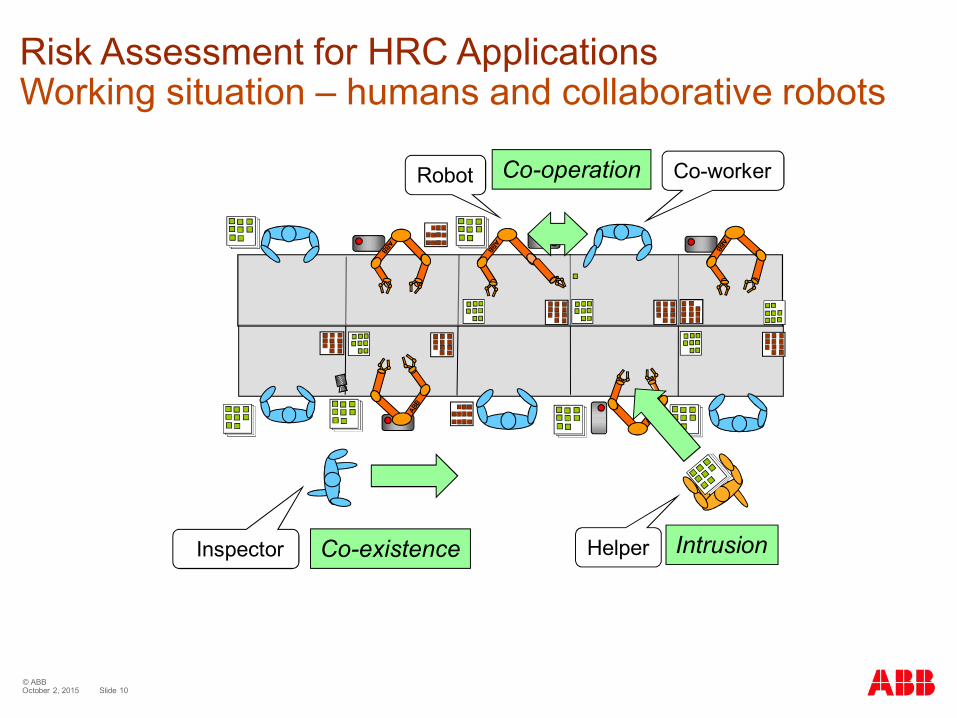
Risk Assessment for HRC ApplicationsWorking situation – humans and collaborative robots
Robot Co-worker
HelperCo-existence Intrusion
Co-operation
Inspector
© ABBSlide 11October 2, 2015
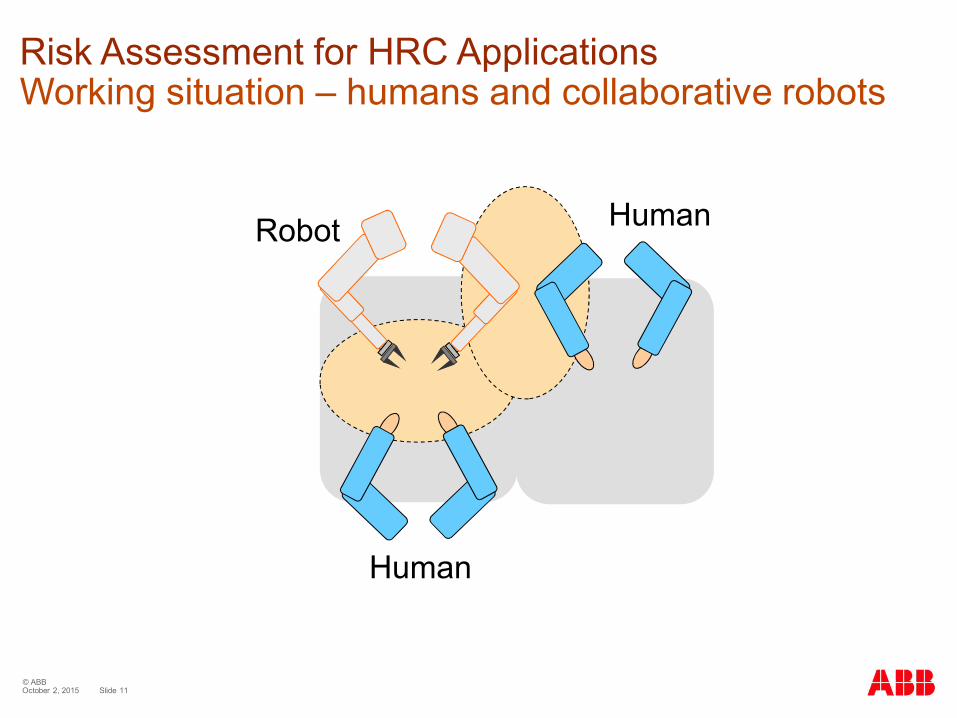
Human
Human
Robot
Risk Assessment for HRC ApplicationsWorking situation – humans and collaborative robots
© ABBSlide 12October 2, 2015
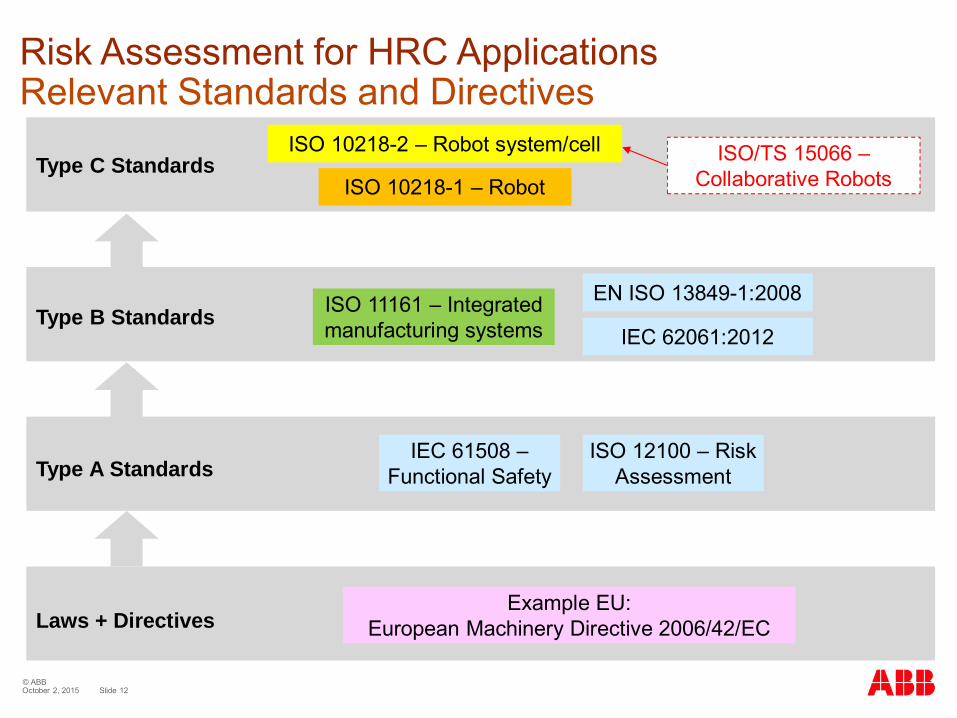
Risk Assessment for HRC ApplicationsRelevant Standards and Directives
Example EU:European Machinery Directive 2006/42/ECLaws + Directives
Type A Standards
Type B Standards
Type C Standards
IEC 61508 –Functional Safety
ISO 12100 – RiskAssessment
EN ISO 13849-1:2008
IEC 62061:2012
ISO 10218-1 – Robot
ISO 10218-2 – Robot system/cell
ISO 11161 – Integratedmanufacturing systems
ISO/TS 15066 –Collaborative Robots
© ABBSlide 13October 2, 2015
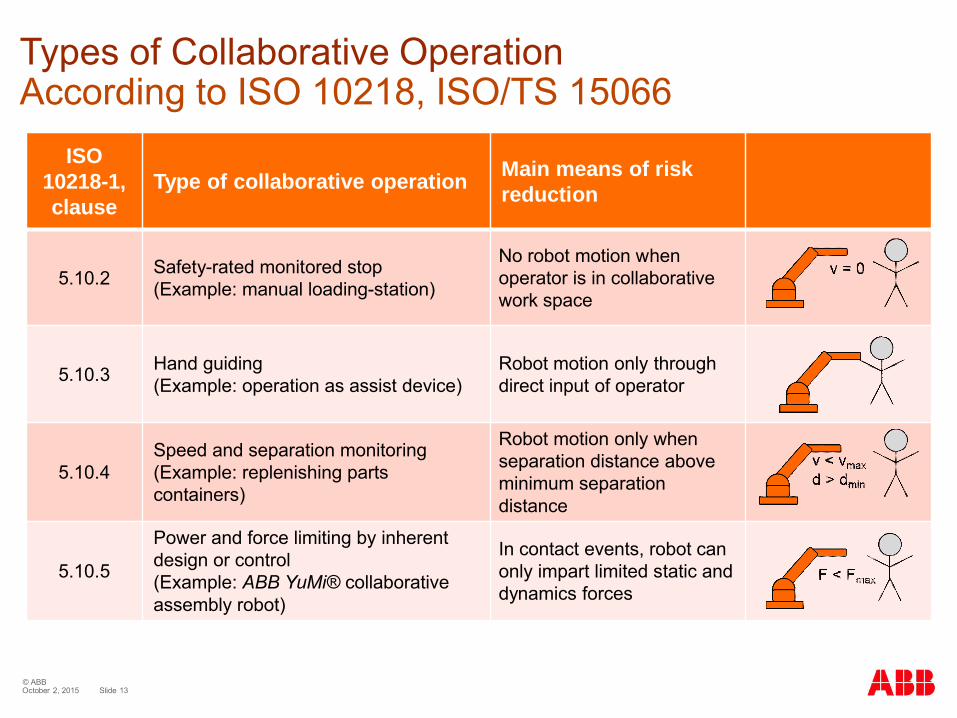
Types of Collaborative OperationAccording to ISO 10218, ISO/TS 15066
ISO10218-1,clause
Type of collaborative operation Main means of riskreduction
5.10.2 Safety-rated monitored stop(Example: manual loading-station)
No robot motion whenoperator is in collaborativework space
5.10.3 Hand guiding(Example: operation as assist device)
Robot motion only throughdirect input of operator
5.10.4Speed and separation monitoring(Example: replenishing partscontainers)
Robot motion only whenseparation distance aboveminimum separationdistance
5.10.5
Power and force limiting by inherentdesign or control(Example: ABB YuMi® collaborativeassembly robot)
In contact events, robot canonly impart limited static anddynamics forces
© ABBSlide 14October 2, 2015
Risk Assessment for HRC Applications
§ Use case identification
§ Hazard identification
§ Risk estimation
§ Risk reduction
§ Iterate until acceptable residual risk
Risk Assessment Basics
© ABBSlide 15October 2, 2015
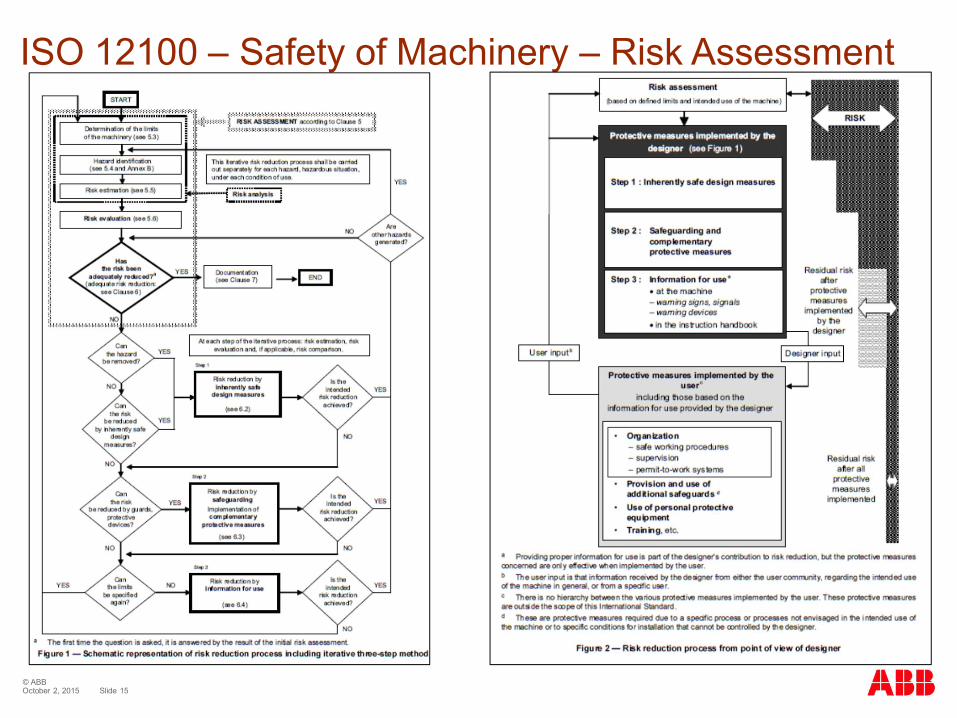
ISO 12100 – Safety of Machinery – Risk Assessment
© ABBSlide 16October 2, 2015
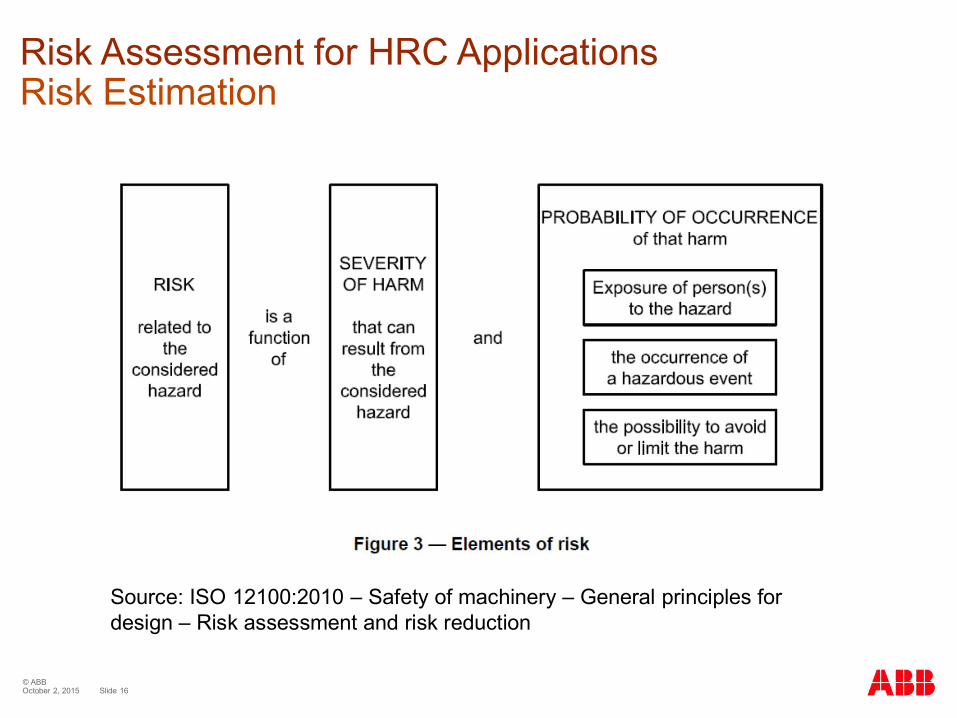
Risk Assessment for HRC ApplicationsRisk Estimation
Source: ISO 12100:2010 – Safety of machinery – General principles fordesign – Risk assessment and risk reduction
© ABBSlide 17October 2, 2015
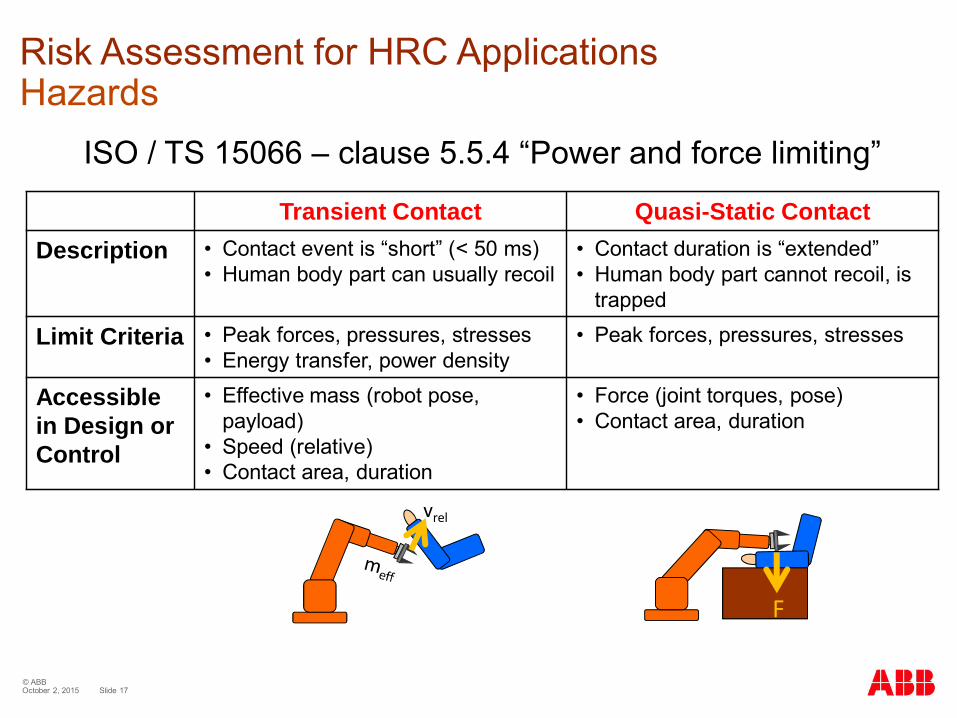
Risk Assessment for HRC ApplicationsHazards
vrel
F
Transient Contact Quasi-Static ContactDescription • Contact event is “short” (< 50 ms)
• Human body part can usually recoil• Contact duration is “extended”• Human body part cannot recoil, is
trapped
Limit Criteria • Peak forces, pressures, stresses• Energy transfer, power density
• Peak forces, pressures, stresses
Accessiblein Design orControl
• Effective mass (robot pose,payload)
• Speed (relative)• Contact area, duration
• Force (joint torques, pose)• Contact area, duration
ISO / TS 15066 – clause 5.5.4 “Power and force limiting”
© ABBSlide 18October 2, 2015
Risk Assessment for HRC Applications
§ Fits in a workspace intended for human worker
§ Can easily be moved from one location to another andrecommissioned
§ Has human-like reach and payload
§ Is inherently safe for collaborative operation
Requirements on Collaborative Robot for PFL
© ABBSlide 19October 2, 2015
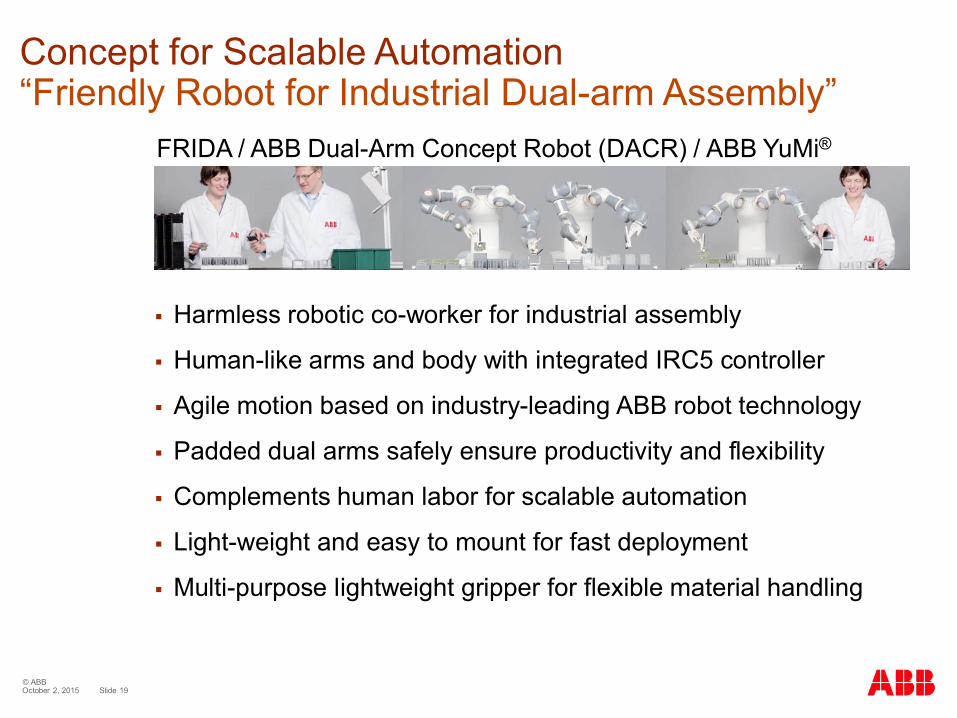
Concept for Scalable Automation“Friendly Robot for Industrial Dual-arm Assembly”
§ Harmless robotic co-worker for industrial assembly
§ Human-like arms and body with integrated IRC5 controller
§ Agile motion based on industry-leading ABB robot technology
§ Padded dual arms safely ensure productivity and flexibility
§ Complements human labor for scalable automation
§ Light-weight and easy to mount for fast deployment
§ Multi-purpose lightweight gripper for flexible material handling
FRIDA / ABB Dual-Arm Concept Robot (DACR) / ABB YuMi®
© ABBSlide 20October 2, 2015
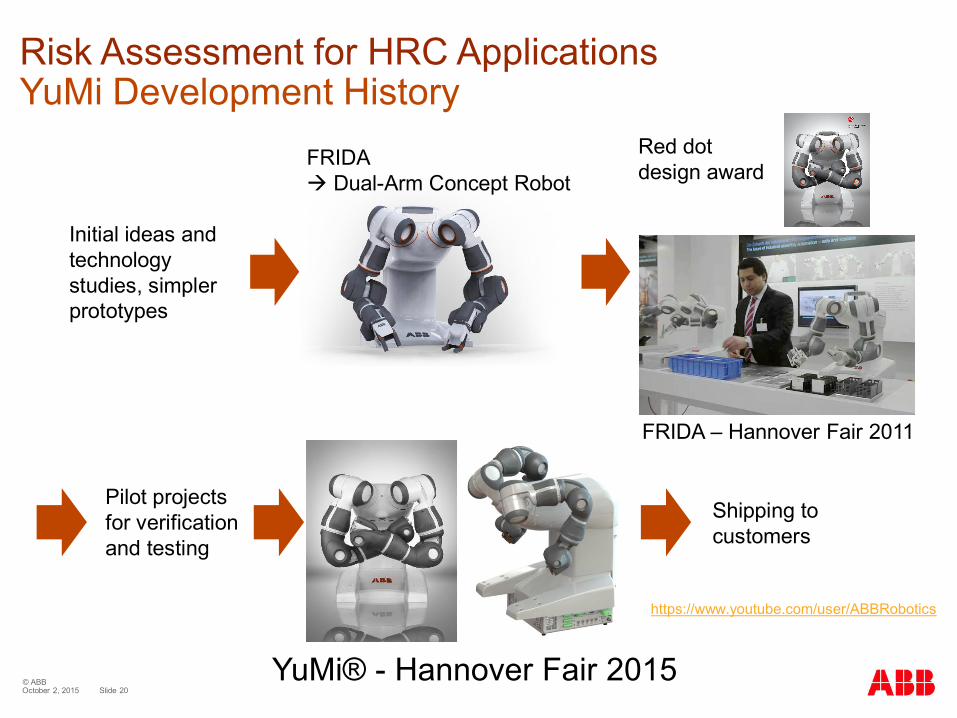
Risk Assessment for HRC ApplicationsYuMi Development History
FRIDAà Dual-Arm Concept Robot
Red dotdesign award
YuMi® - Hannover Fair 2015
FRIDA – Hannover Fair 2011
Pilot projectsfor verificationand testing
Shipping tocustomers
Initial ideas andtechnologystudies, simplerprototypes
https://www.youtube.com/user/ABBRobotics
© ABBSlide 21October 2, 2015
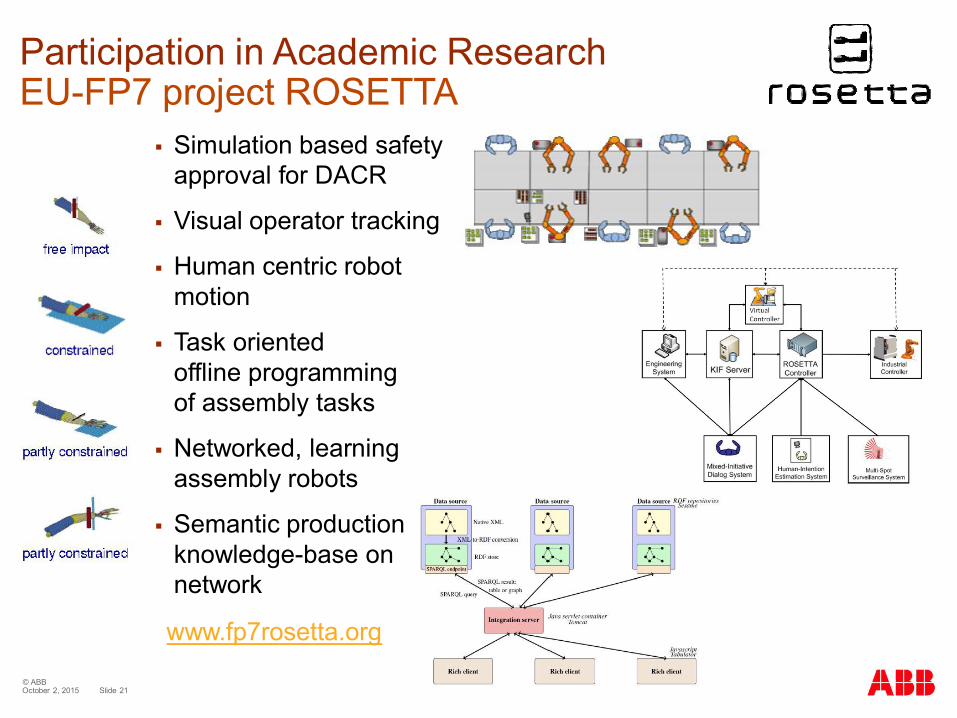
Participation in Academic ResearchEU-FP7 project ROSETTA
§ Simulation based safetyapproval for DACR
§ Visual operator tracking
§ Human centric robotmotion
§ Task orientedoffline programmingof assembly tasks
§ Networked, learningassembly robots
§ Semantic productionknowledge-base onnetwork
www.fp7rosetta.org
© ABBSlide 22October 2, 2015
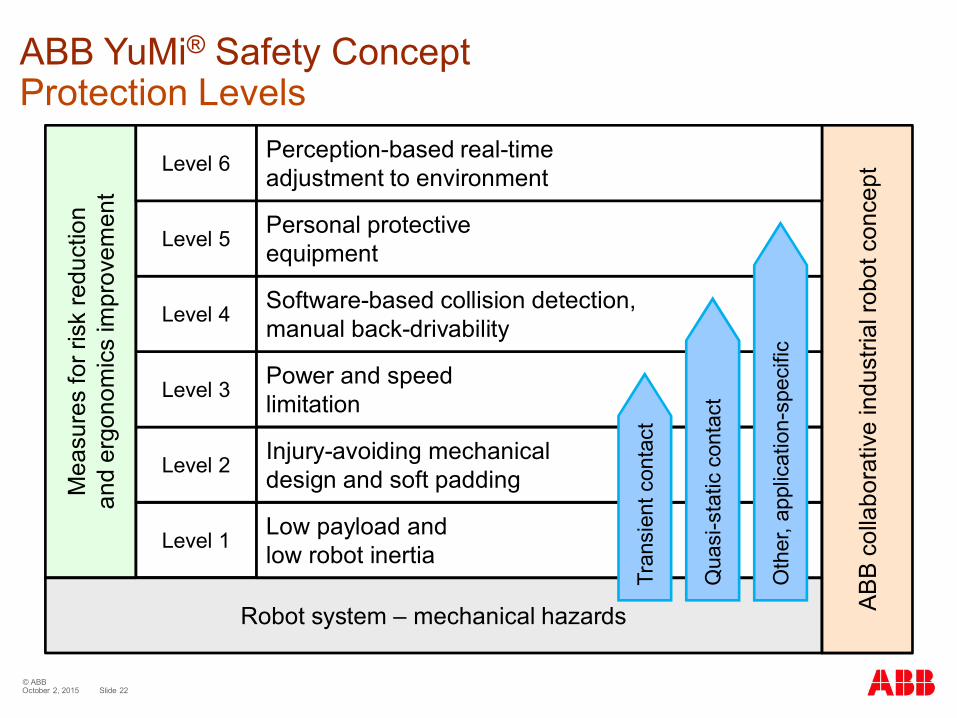
Level 1
Level 2
Level 3
Level 4
Robot system – mechanical hazards
Low payload andlow robot inertia
Injury-avoiding mechanicaldesign and soft padding
Power and speedlimitation
Software-based collision detection,manual back-drivability
Level 5 Personal protectiveequipment
AB
Bco
llabo
rativ
ein
dust
rialr
obot
conc
ept
Mea
sure
sfo
rris
kre
duct
ion
and
ergo
nom
ics
impr
ovem
ent
Level 6 Perception-based real-timeadjustment to environment
Oth
er,a
pplic
atio
n-sp
ecifi
c
Qua
si-s
tatic
cont
act
Tran
sien
tcon
tact
ABB YuMi® Safety ConceptProtection Levels
© ABBSlide 23October 2, 2015
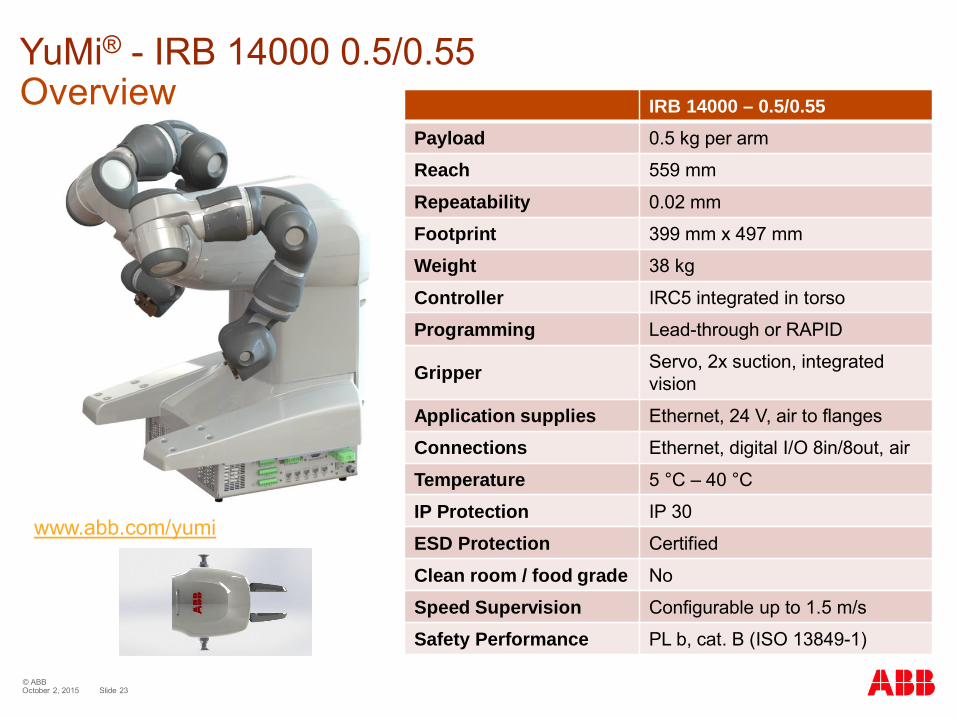
YuMi® - IRB 14000 0.5/0.55Overview IRB 14000 – 0.5/0.55
Payload 0.5 kg per arm
Reach 559 mm
Repeatability 0.02 mm
Footprint 399 mm x 497 mm
Weight 38 kg
Controller IRC5 integrated in torso
Programming Lead-through or RAPID
Gripper Servo, 2x suction, integratedvision
Application supplies Ethernet, 24 V, air to flanges
Connections Ethernet, digital I/O 8in/8out, air
Temperature 5 °C – 40 °C
IP Protection IP 30
ESD Protection Certified
Clean room / food grade No
Speed Supervision Configurable up to 1.5 m/s
Safety Performance PL b, cat. B (ISO 13849-1)
www.abb.com/yumi

© ABBSlide 24October 2, 2015
§ Collaborative Assembly(Plastic parts etc.)
§ Packaging of small goods
§ Multifunction hand for addcomponents
Small Parts Assembly Consumer Products Toy Industry
§ Collaborative Assembly§ Camera-based inspection
and assembly§ Accurate and fast
assembly§ Testing and packaging
§ Collaborative Assembly(toys)
§ Use of feeding and visionoptions
YuMi®Target growth markets
© ABBSlide 25October 2, 2015
Risk Assessment for HRC Applications
§ Internal application example
§ ABB Busch-Jaeger, Lüdenscheid
§ Pick-and-place operation
§ Co-existence in production
§ Customer application example
§ Continental
§ Packaging operation
§ Co-existence in production
Example YuMi Application – Risk Assessment
© ABBSlide 26October 2, 2015
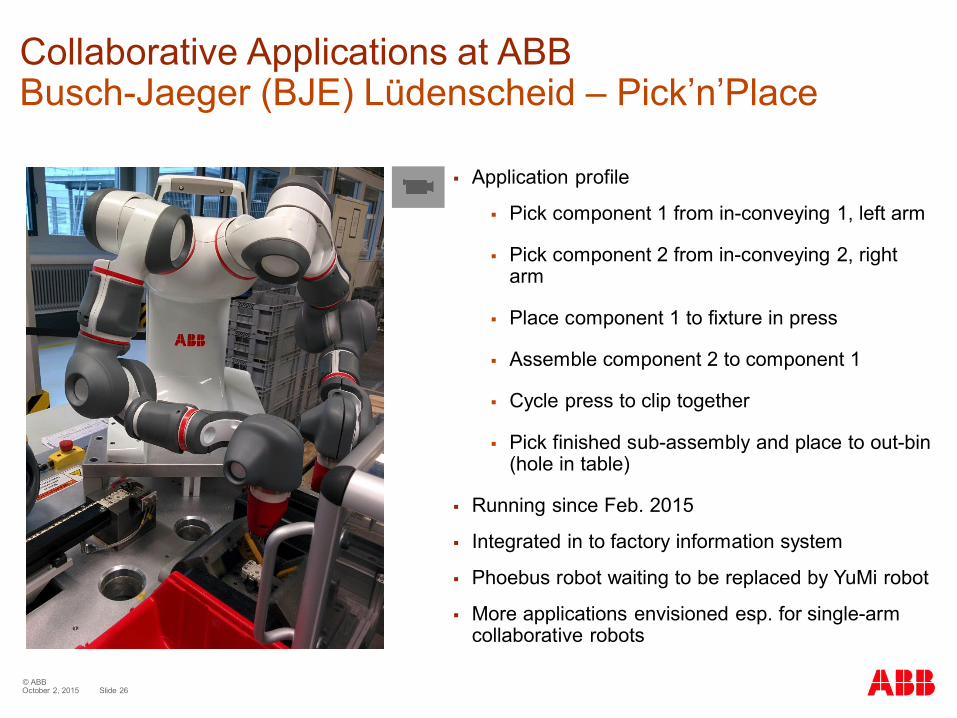
Collaborative Applications at ABB
§ Application profile
§ Pick component 1 from in-conveying 1, left arm
§ Pick component 2 from in-conveying 2, rightarm
§ Place component 1 to fixture in press
§ Assemble component 2 to component 1
§ Cycle press to clip together
§ Pick finished sub-assembly and place to out-bin(hole in table)
§ Running since Feb. 2015
§ Integrated in to factory information system
§ Phoebus robot waiting to be replaced by YuMi robot
§ More applications envisioned esp. for single-armcollaborative robots
Busch-Jaeger (BJE) Lüdenscheid – Pick’n’Place
© ABBSlide 27October 2, 2015
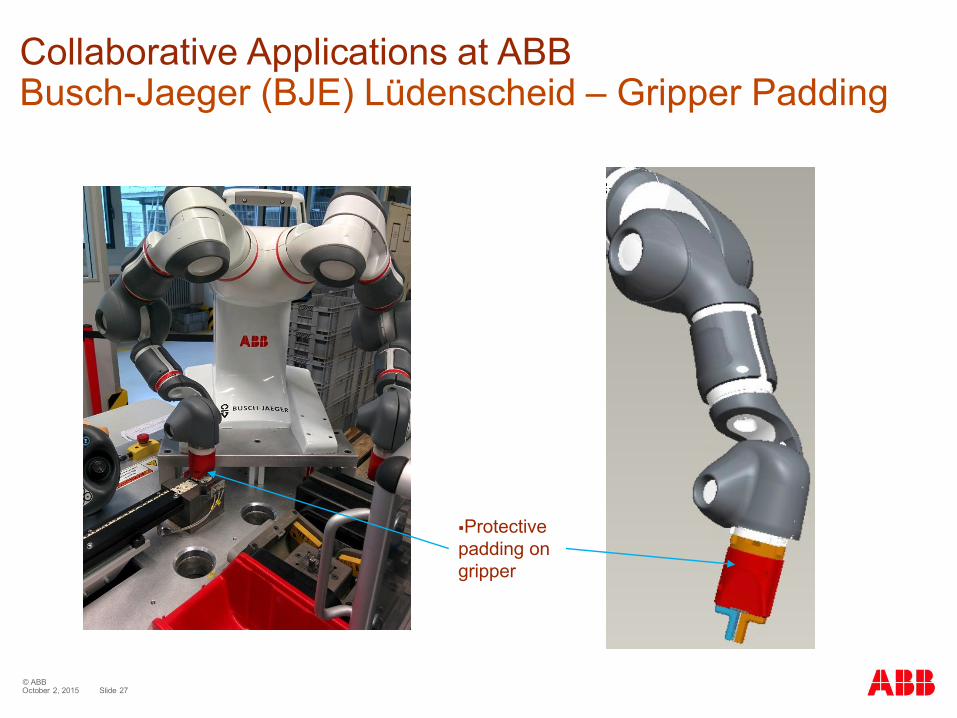
Collaborative Applications at ABBBusch-Jaeger (BJE) Lüdenscheid – Gripper Padding
§Protectivepadding ongripper
© ABBSlide 28October 2, 2015
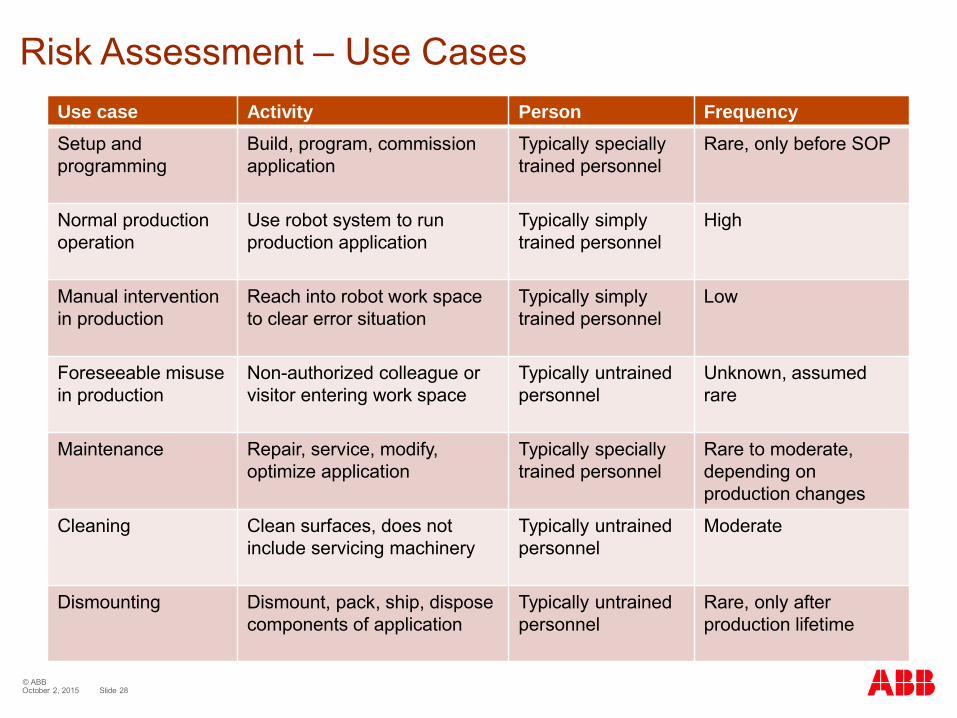
Risk Assessment – Use CasesUse case Activity Person FrequencySetup andprogramming
Build, program, commissionapplication
Typically speciallytrained personnel
Rare, only before SOP
Normal productionoperation
Use robot system to runproduction application
Typically simplytrained personnel
High
Manual interventionin production
Reach into robot work spaceto clear error situation
Typically simplytrained personnel
Low
Foreseeable misusein production
Non-authorized colleague orvisitor entering work space
Typically untrainedpersonnel
Unknown, assumedrare
Maintenance Repair, service, modify,optimize application
Typically speciallytrained personnel
Rare to moderate,depending onproduction changes
Cleaning Clean surfaces, does notinclude servicing machinery
Typically untrainedpersonnel
Moderate
Dismounting Dismount, pack, ship, disposecomponents of application
Typically untrainedpersonnel
Rare, only afterproduction lifetime
© ABBSlide 29October 2, 2015
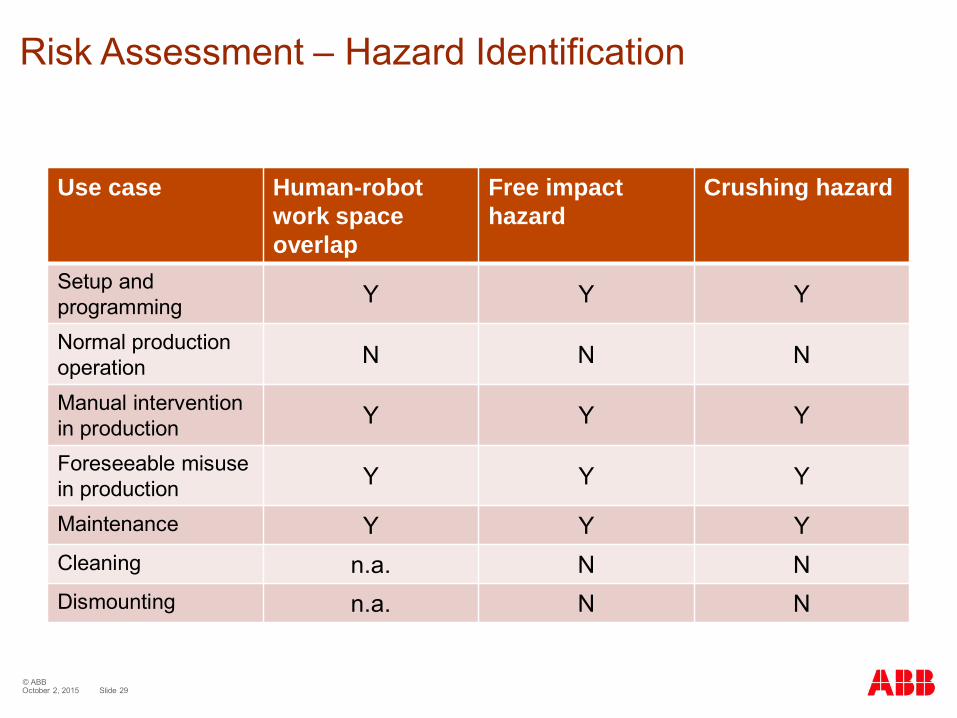
Risk Assessment – Hazard Identification
Use case Human-robotwork spaceoverlap
Free impacthazard
Crushing hazard
Setup andprogramming Y Y Y
Normal productionoperation N N N
Manual interventionin production Y Y Y
Foreseeable misusein production Y Y Y
Maintenance Y Y YCleaning n.a. N NDismounting n.a. N N
© ABBSlide 30October 2, 2015
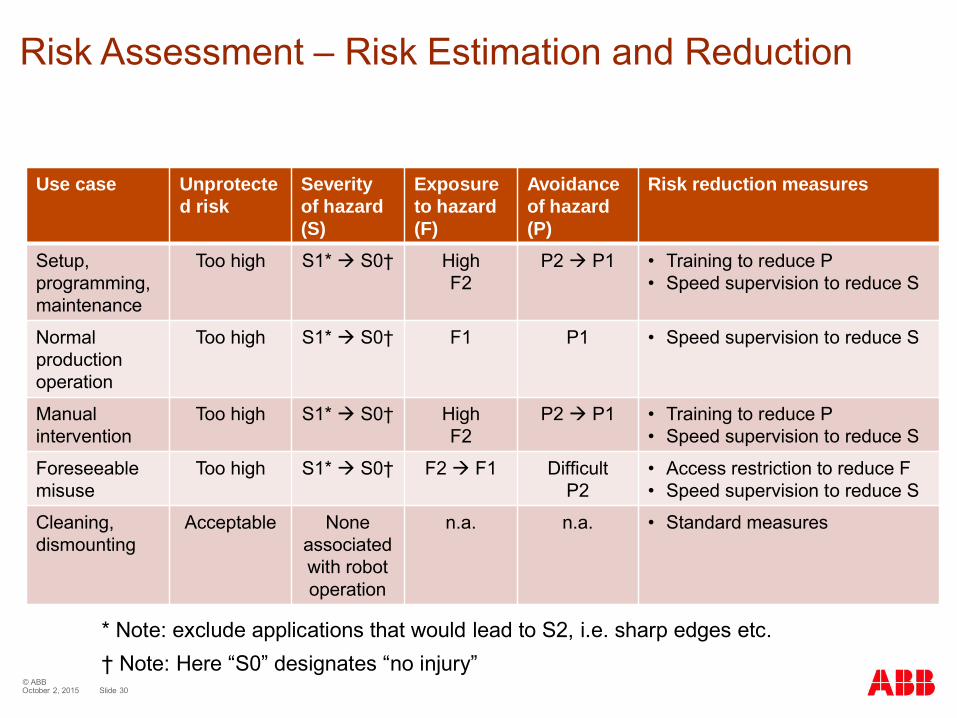
Risk Assessment – Risk Estimation and Reduction
Use case Unprotected risk
Severityof hazard(S)
Exposureto hazard(F)
Avoidanceof hazard(P)
Risk reduction measures
Setup,programming,maintenance
Too high S1*à S0† HighF2
P2à P1 • Training to reduce P• Speed supervision to reduce S
Normalproductionoperation
Too high S1*à S0† F1 P1 • Speed supervision to reduce S
Manualintervention
Too high S1*à S0† HighF2
P2à P1 • Training to reduce P• Speed supervision to reduce S
Foreseeablemisuse
Too high S1*à S0† F2à F1 DifficultP2
• Access restriction to reduce F• Speed supervision to reduce S
Cleaning,dismounting
Acceptable Noneassociatedwith robotoperation
n.a. n.a. • Standard measures
* Note: exclude applications that would lead to S2, i.e. sharp edges etc.† Note: Here “S0” designates “no injury”
© ABBSlide 31October 2, 2015
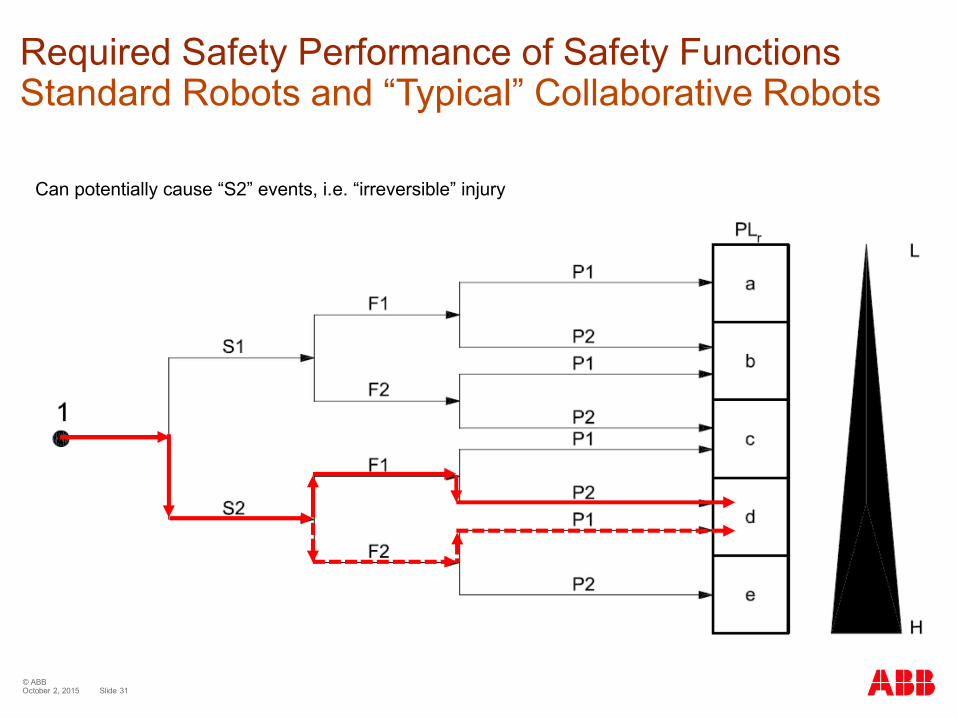
Required Safety Performance of Safety FunctionsStandard Robots and “Typical” Collaborative Robots
Can potentially cause “S2” events, i.e. “irreversible” injury
© ABBSlide 32October 2, 2015
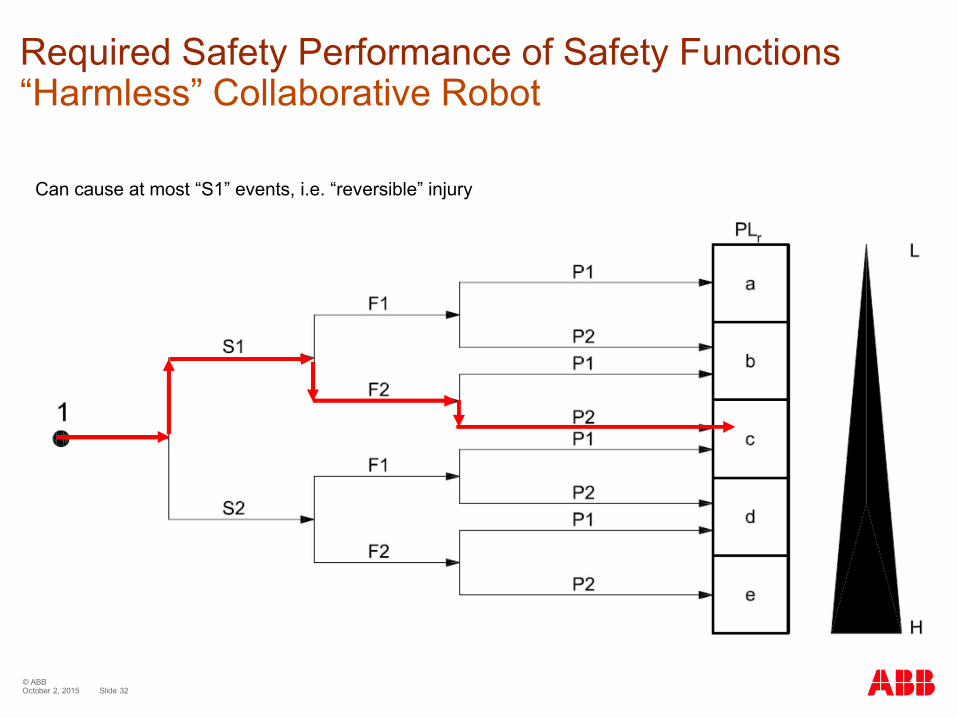
Required Safety Performance of Safety Functions“Harmless” Collaborative Robot
Can cause at most “S1” events, i.e. “reversible” injury
© ABBSlide 33October 2, 2015
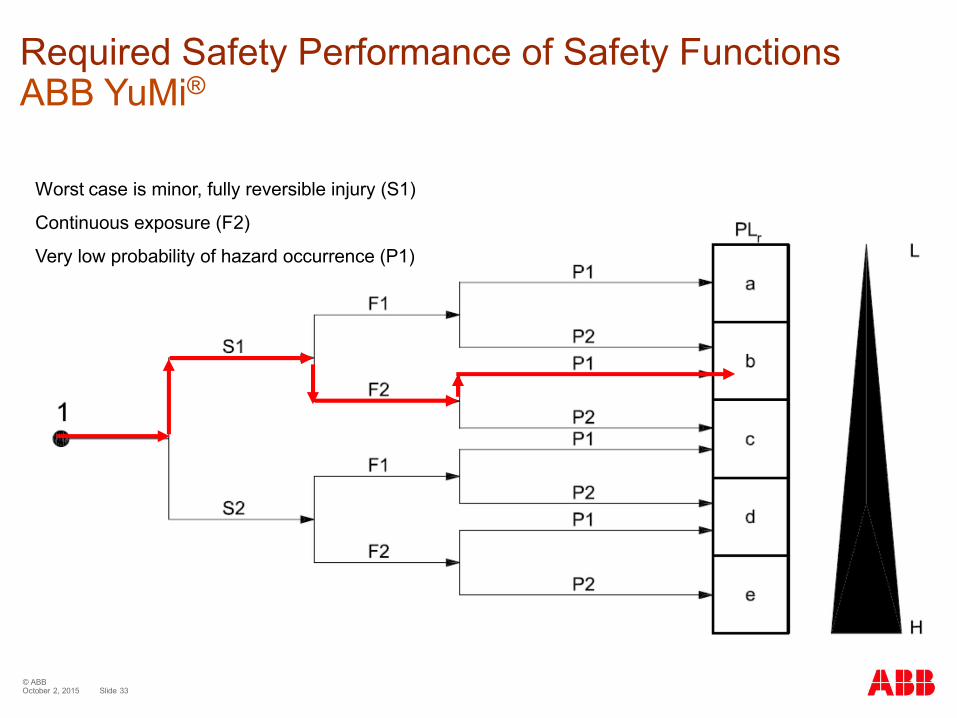
Required Safety Performance of Safety FunctionsABB YuMi®
Worst case is minor, fully reversible injury (S1)
Continuous exposure (F2)
Very low probability of hazard occurrence (P1)
© ABBSlide 34October 2, 2015
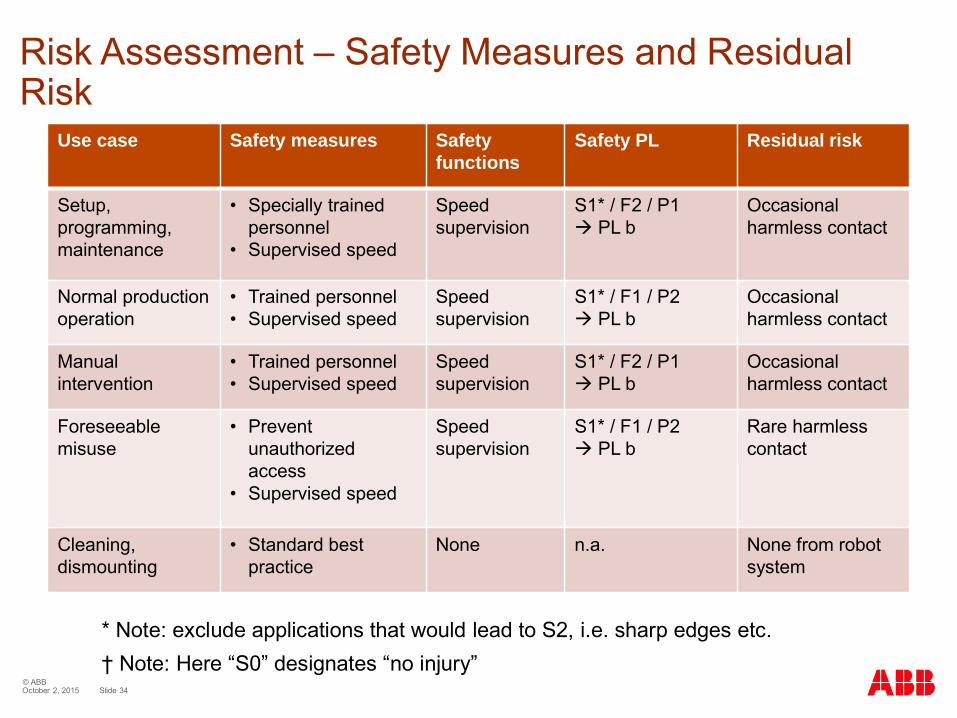
Risk Assessment – Safety Measures and ResidualRisk
Use case Safety measures Safetyfunctions
Safety PL Residual risk
Setup,programming,maintenance
• Specially trainedpersonnel
• Supervised speed
Speedsupervision
S1* / F2 / P1à PL b
Occasionalharmless contact
Normal productionoperation
• Trained personnel• Supervised speed
Speedsupervision
S1* / F1 / P2à PL b
Occasionalharmless contact
Manualintervention
• Trained personnel• Supervised speed
Speedsupervision
S1* / F2 / P1à PL b
Occasionalharmless contact
Foreseeablemisuse
• Preventunauthorizedaccess
• Supervised speed
Speedsupervision
S1* / F1 / P2à PL b
Rare harmlesscontact
Cleaning,dismounting
• Standard bestpractice
None n.a. None from robotsystem
* Note: exclude applications that would lead to S2, i.e. sharp edges etc.† Note: Here “S0” designates “no injury”
© ABBSlide 35October 2, 2015
Multi-HRC stations for scalable automation
§ Safety§ Many persons exposed to multiple robots§ Increased role of safety sensors?§ Risk assessment update after reconfiguration of line?
§ Flexibility§ Methods and tools for quick commissioning of new applications§ Optimal sequence of stations§ Optimal assignment of manufacturing steps to robots and workers
§ Productivity§ Best layout and operating parameters for ergonomics
… going to multiple HRC lines – New Questions



![Generating Calligraphic Trajectories with Model Predictive ...scalinon/papers/Berio-GI2017.pdf · similar to ours, Berio and Leymarie [3] apply the Sigma Lognormal handwriting model](https://img.pdfslide.us/doc/110x75/5ec09796c3261d0f3b0a3205/generating-calligraphic-trajectories-with-model-predictive-scalinonpapersberio-.jpg)

























