Biometrics and Sensors Venu Govindaraju CUBS, University at
Buffalo [email protected]
Slide 2
Organization Biometrics and Sensor research at UB Biometrics
Fingerprint Verification Signature Verification Hand Geometry
Multimodal biometrics Securing Biometric Data Sensors and
Devices
Slide 3
Research at UB Multimodal Identification Biometrics Fingerprint
Signature Hand Geometry Sensors Materials and Light Sources Analog
VLSI and Optical Detectors Packaging and Reliability
Engineering
Slide 4
Applications And Scope of Biometrics TechnologiesHorizontal
ApplicationsKey Vertical Markets FingerprintCivil IDGovernment
Sector Facial RecognitionSurveillance and ScreeningTravel and
Transportation Iris ScanPC / Network AccessFinancial Sector
MiddlewareRetail / ATM / Point of SaleHealth Care AFISeCommerce /
TelephonyLaw Enforcement Voice ScanPhysical Access / Time and
Attendance Hand GeometryCriminal ID Signature Verification
Keystroke Dynamics
Slide 5
Scope of Research In Biometrics BiometricsState of the
artResearch Problems Fingerprint 0.15% FRR at 1% FAR (FVC 2002)
Fingerprint Enhancement Partial fingerprint matching Face
Recognition 10% FRR at 1% FAR (FRVT 2002) Improving accuracy Face
alignment variation Handling lighting variations Hand Geometry 4%
FRR at 0% FAR (Transport Security Adminstration Tests) Developing
reliable models Identification problem Signature Verification 1.5%
(IBM Israel) Developing offline verification systems Handling
skillful forgeries Chemical Biometrics No open testing done yet
Development of sensors Materials research
Slide 6
Biometrics Biometrics and Sensor research at UB Biometrics
Fingerprint Verification Signature Verification Hand Geometry
Multimodal biometrics Securing Biometric Data Sensors and
Devices
Slide 7
Conventional Security Measures Token Based Smart cards Swipe
cards Knowledge Based Username/password PIN Disadvantages of
Conventional Measures Tokens can be lost or misused Passwords can
be forgotten Multiple tokens and passwords difficult to manage
Slide 8
Biometrics Definition Biometrics is the science of verifying
and establishing the identity of an individual through
physiological features or behavioral traits Examples Physical
Biometrics Fingerprint, Hand Geometry,Iris,Face Behavioral
Biometrics Handwriting, Signature, Speech, Gait Chemical Biometrics
DNA, blood-glucose
Slide 9
Fingerprint Verification Biometrics and Sensor research at UB
Biometrics Fingerprint Verification Signature Verification Hand
Geometry Multimodal biometrics Securing Biometric Data Sensors and
Devices
Slide 10
Fingerprint Verification Fingerprints can be classified based
on the ridge flow pattern Fingerprints can be distinguished based
on the ridge characteristics
Fourier Analysis Applied to fingerprints Fingerprint ridges can
be modeled as an oriented wave Local ridge orientation Local ridge
frequency
Slide 15
Fourier Analysis Energy Map Preprocessing Enhancement Feature
Extraction Matching Original ImageEnergy MapThresholded Map
Slide 16
Preprocessing Enhancement Feature Extraction Matching Original
ImageLocal Ridge Frequency Map Fourier Analysis Frequency Map
Slide 17
Preprocessing Enhancement Feature Extraction Matching Original
Image Local Ridge Orientation Map Fourier Analysis-Orientation
Map
Slide 18
Preprocessing Enhancement Feature Extraction Matching Original
ImageEnhanced Image FFT Based Enhancement
Slide 19
Common Feature Extraction Methods Thinning-based Method
Thinning produces artifacts Shifting of Minutiae coordinates
Preprocessing Enhancement Feature Extraction Matching Direct
Gray-Scale Extraction Method Difficult to determine location and
orientation Binarized Image is noisy.
Slide 20
Chaincoded Ridge Following Method Preprocessing Enhancement
Feature Extraction Matching
Slide 21
Minutiae Detection Several points in each turn are detected as
potential minutiae candidate One of each group is selected as
detected minutiae. Minutiae Orientation is detected by considering
the angle subtended by two extreme points on the ridge at the
middle point. Preprocessing Enhancement Feature Extraction
Matching
Slide 22
Pruning Detected Minutiae Ending minutiae in the boundary of
fingerprint images need to be removed with help of FFT Energy Map
Closest minutiae with similar orientation need to be removed
Preprocessing Enhancement Feature Extraction Matching
Slide 23
Pure localized feature Derived from minutiae representation
Orientation invariant Denote as (r 0, r 1, 0, 1, ) r 0, r 1 :
lengths of MN 0 and MN 1 0, 1 : relative minutiae orientation
w.r.t. M : angle of N 0 MN 1 Secondary Features Preprocessing
Enhancement Feature Extraction Matching
Slide 24
Dynamic Tolerance Areas Tolerance Area is dynamically decided
w.r.t. the length of the leg. Longer leg: Tolerates more distortion
in length than the angle. Shorter leg: tolerates less distortion in
length than the angle. A B O Preprocessing Enhancement Feature
Extraction Matching Dynamic tolerance Dynamic Windows
Slide 25
Feature Matching Preprocessing Enhancement Feature Extraction
Matching 1.For each triangle, generate a list of candidate matching
triangles 2.To recover the rotation between the prints. Find the
most probable orientation difference 3.Apply the results of the
pruning and match the rest of the points based on the reference
points established.
Slide 26
OD=0.7865 Validation Preprocessing Enhancement Feature
Extraction Matching 1.For each triangle, generate a list of
candidate matching triangles 2.To recover the rotation between the
prints. Find the most probable orientation difference 3.Apply the
results of the pruning and match the rest of the points based on
the reference points established.
Slide 27
Minutia Matching Preprocessing Enhancement Feature Extraction
Matching 1.For each triangle, generate a list of candidate matching
triangles 2.To recover the rotation between the prints. Find the
most probable orientation difference 3.Apply the results of the
pruning and match the rest of the points based on the reference
points established
Slide 28
Data Sets Fig(a) Sensors and technology used in acquisition
Fig(b) Paired fingerprintsFig(c) Database sets
Slide 29
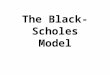
Preliminary Results Min Total Error = 1.16% ERR = 1.0% FRR at 0
FAR = 5.0% FARFRR Threshold Min Total Error = 0.19% FRR at 0 FAR =
0.38% State of the art
Slide 30
Signature Verification Biometrics and Sensor research at UB
Biometrics Fingerprint Verification Signature Verification Hand
Geometry Multimodal biometrics Securing Biometric Data Sensors and
Devices
Slide 31
Signature Verification Off line Signature Verification Online
Signature verification
Slide 32
Preprocessing Make signature invariant to scale, translation
and rotation. mean-std norm. Resampling Smoothing Preprocessing
Template generation Matching Preprocessing 0-160 -1.5-3.5 (-170)-
(-125) (-3.0)- (4.0)
Slide 33
Preprocessing Template generation Matching Extracting features.
Usually we can not expect more than 6 genuine signatures for
training for each subject. This is unlike handwriting recognition
Decide the consistent features. There are over 100 features for
signature, such as Width, Height, Duration, Orientation, X
positions, Y positions, Speed, Curvature, Pressure, so on. Template
Generation- Challenges
Slide 34
Simple Regression Model Similarity by R 2 : 91% R2=R2=
Preprocessing Template generation Matching Y = (y 1, y 2, , y n ) X
= (x 1, x 2, , x n ) Matching Similarity Measure Similarity by R 2
: 31%
Slide 35
Advantages: Invariant to scale and translation. Similarity
(Goodness-of-fit) makes sense. Disadvantages: One-one alignment,
brittle. One-One alignmentDynamic alignment Preprocessing Template
generation Matching Traditional Regression approach
Slide 36
DTW warping path in a n-by-m matrix is the path which has min
cumulative cost. The unmarked area is the constrain that path is
allowed to go. ( y 2 is matched x 2, x 3, so we extend it to be two
points in Y sequence.) Preprocessing Template generation Matching
Similarity = R 2 Dynamic Regression approach(1) Where (x 1i, y 1i,
v 1i ) are points in the sequence And a, b, c are the weights,
e.g., 0.5, 0.5, 0.25
Slide 37
Offline Signature Verification Shapes can be described using
structural or statistical features We use an analytical approach
that uses the attributes of structures. Extracting structural
features
Slide 38
Attributes of structural features Statistical analysis of the
feature attributes Attributes of structural features
Slide 39
Hidden Markov Models and SFSA Obtaining a stochastic model
Outgoing transitional probabilities The occurrence of the
structural features can be modeled as a HMM The HMM can be
converted to a SFSA by assigning observation and probability to the
transitions instead of to the states
Slide 40
Hand Geometry Biometrics and Sensor research at UB Biometrics
Fingerprint Verification Signature Verification Hand Geometry
Multimodal biometrics Securing Biometric Data Sensors and
Devices
Slide 41
Used where Robustness, Low cost are the concerns. Comparatively
less accurate. Combination with other Biometric techniques,
increases accuracy. Sufficient for verification where finger print
use may infringe on privacy. Hand Geometry
Slide 42
A snapshot of the top and side views of the users right hand
gives the contours outlining the hand. Features necessary to
identify the hand are extracted from these contours. Using simple
image processing techniques, the contours of the set of two images
of the hand are obtained. Hand-verification is done by correlating
these features. Research: New features and algorithms for better
discrimination between two hands. Feature Extraction
Slide 43
Multimodal Biometrics Biometrics and Sensor research at UB
Biometrics Fingerprint Verification Signature Verification Hand
Geometry Multimodal biometrics Securing Biometric Data Sensors and
Devices
Slide 44
Combination of biometric matchers Fingerprint matching Hand
geometry matching Signature matching Alice Bob : 26 12 : Alice Bob
: 0.31 0.45 : Alice Bob : 5.54 7.81 : Alice Bob : 0.95 0.11 :
Combination algorithm Combination of the matching results of
different biometric features provides higher accuracy.
Slide 45
Sequential combination of matchers Fingerprint matching Hand
geometry matching Signature matching Alice Bob : 0.95 0.11 :
Combination algorithm 1 Desired confidence achieved? Combination
algorithm 2 Desired confidence achieved? Combination algorithm 3 No
Yes
Slide 46
Securing Biometric Data Biometrics and Sensor research at UB
Biometrics Fingerprint Verification Signature Verification Hand
Geometry Multimodal biometrics Securing Biometric Data Sensors and
Devices
Slide 47
Securing password information It is impossible to learn the
original password given stored hash value of it.
Slide 48
Securing fingerprint information Wish to use similar functions
for fingerprint data:
Slide 49
Obstacles in finding hash functions Since match algorithm will
work with the values of hash functions, similar fingerprints should
have similar hash values rotation and translation of original image
should not have big impact on hash values partial fingerprints
should be matched Fingerprint spaceHash space h f1f1 f2f2 h(f 1 )
h(f 2 )
Slide 50
Sensors and Devices Biometrics and Sensor research at UB
Biometrics Fingerprint Verification Securing Biometric Data
Signature Verification Hand Geometry Sensors and Devices
Slide 51
Sensors and Biometrics Fingerprint Optical Sensors Capacitive
Sensors Thermal Sensors Ultrasound Sensors Signature Digitizer
Tablet Digitizer Pen Offline scanning Face Recognition Optical
Digital camera Thermal cameras Chemical Biometrics Sensor Arrays
Smart Devices (Research at UB)
Slide 52
CMOS CCDs Photodiodes Image Processing Tissues Cells Proteins
DNA and RNA Organic and Inorganic Dyes Molecular Imprinting Light
Sources (OLEDs, LEDs, Lasers) Signal Generators Driver Circuits
Power Supply Biosurfaces Biofouling Immobilization and
Stabilization Transduction mechanism Multi-Analyte detection
Photonic Bandgap (PBG) Resonators Evanescent Wave Devices (PBG)
Biosurfaces - Biofouling Bioinspired Pattern Recognition
Biomimetics Artificial Vision, Smell. Bioinspired Super Correlator
Biosurfaces Biofouling Nano-LEDs Bioinspired Photovoltaics, Biofuel
Cells Environmental Testing Low Power Light Sources Detector System
Sensing Layer Stimulator and Support System Analyte c) Deviceb)
Enabling Technologiesa) Fundamental Knowledge Sensors
Slide 53
Blocking Filter Output Device Stimulator and Support System
Detector System Sensing Layer Sensor Components
Slide 54
CMOS Integrated Sensor System
Slide 55
60 m 1.2 m thick Sensor System Components
Slide 56
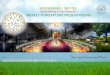
Response (%) *** * * ** * Protein * Analyte The sensors
selectively respond to Ovalbumin Orders of magnitude greater than
other components Each site can individually respond to different
analytes PIXIES Protein Imprinted Xerogels with Integrated Emission
Sites
Slide 57
A unique collaborative initiative that enables state-of-the-art
Biometric Science and Technology Creating a multi-disciplinary
environment attracting faculty and students from engineering and
sciences Preparing and educating future Biometric Scientists and
Engineers Targeting all the aspects of Biometrics from
authentication to materials and including them into a packaged
device Summary
Slide 58
www.cubs.buffalo.eduwww.cubs.buffalo.edu
www.photonics.buffalo.eduwww.photonics.buffalo.edu
www.cedar.buffalo.eduwww.cedar.buffalo.edu
www.packaging.buffalo.eduwww.packaging.buffalo.edu Financial
support of: National Science Foundation (NSF) Office of Naval
Research (ONR) Calspan UB Research Center (CUBRC) University at
Buffalo Center for Advanced Technology (UBCAT) Acknowledgements
Websites