Embed Size (px)
Citation preview

1
CS252A, Fall 2013 Computer Vision I
Radiometry and Reflectance
Computer Vision I CSE 252A Lecture 6
CS252A, Fall 2013 Computer Vision I
Announcements • HW1 assigned.
CS252A, Fall 2013 Computer Vision I
Beyond the pinhole Camera Getting more light – Bigger Aperture
CS252A, Fall 2013 Computer Vision I
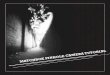
Pinhole Camera Images with Variable Aperture
1mm
.35 mm
.07 mm
.6 mm
2 mm
.15 mm
CS252A, Fall 2013 Computer Vision I
The reason for lenses We need light, but big pinholes cause blur.
CS252A, Fall 2013 Computer Vision I
Thin Lens
O
• Rotationally symmetric about optical axis. • Spherical interfaces.
Optical axis

2
CS252A, Fall 2013 Computer Vision I
Thin Lens: Center
O
• All rays that enter lens along line pointing at O emerge in same direction.
F
CS252A, Fall 2013 Computer Vision I
Thin Lens: Focus
O
Parallel lines pass through the focus, F
F
CS252A, Fall 2013 Computer Vision I
Thin Lens: Image of Point
O
All rays passing through lens and starting at P converge upon P’
So light gather capability of lens is given the area of the lens and all the rays focus on P’ instead of become blurred like a pinhole
F
P
P’
CS252A, Fall 2013 Computer Vision I
Thin Lens: Image of Point
O F
P
P’ Z’
f
Z
Relation between depth of Point (Z) and the depth where it focuses (Z’)
CS252A, Fall 2013 Computer Vision I
Thin Lens: Image Plane
O F
P
P’
Image Plane
Q’
Q
A price: Whereas the image of P is in focus, the image of Q isn’t.
CS252A, Fall 2013 Computer Vision I
Thin Lens: Aperture
O
P
P’
Image Plane • Smaller Aperture -> Less Blur • Pinhole -> No Blur

3
CS252A, Fall 2013 Computer Vision I
Field of View
O Field of View
Image Plane
f
Field of view is a function of f and size of image plane. CS252A, Fall 2013 Computer Vision I
Deviations from this ideal are aberrations Two types
2. chromatic
1. geometrical spherical aberration astigmatism distortion coma
Aberrations are reduced by combining lenses
Compound lenses
Deviations from the lens model
CS252A, Fall 2013 Computer Vision I
Spherical aberration
Rays parallel to the axis do not converge
Outer portions of the lens yield smaller focal lengths
CS252A, Fall 2013 Computer Vision I
Astigmatism An optical system with astigmatism is one where rays that propagate in
two perpendicular planes have different focus. If an optical system with astigmatism is used to form an image of a cross, the vertical and horizontal lines will be in sharp focus at two different distances.
object
CS252A, Fall 2013 Computer Vision I
Distortion magnification/focal length different for different angles of inclination
Can be corrected! (if parameters are know)
pincushion (tele-photo)
barrel (wide-angle)
CS252A, Fall 2013 Computer Vision I
Chromatic aberration (great for prisms, bad for lenses)

4
CS252A, Fall 2013 Computer Vision I
Chromatic aberration
rays of different wavelengths focused in different planes
cannot be removed completely
CS252A, Fall 2013 Computer Vision I
Chromatic aberration
rays of different wavelengths focused in different planes
cannot be removed completely
sometimes achromatization is achieved for more than 2 wavelengths
CS252A, Fall 2013 Computer Vision I
Only part of the light reaches the sensor Periphery of the image is dimmer
Vignetting
CS252A, Fall 2013 Computer Vision I
Vignetting: Spatial Non-Uniformity
camera Iris
Litvinov & Schechner, radiometric nonidealities
CS252A, Fall 2012 Computer Vision I
Radiometry • Read Chapter 4 of Ponce & Forsyth • Szeliski Sec. 2.2, 2.3 • Solid Angle • Irradiance • Radiance • BRDF • Lambertian/Phong BRDF
CS252A, Fall 2012 Computer Vision I
Appearance: lighting, surface reflectance

5
CS252A, Fall 2012 Computer Vision I
A local coordinate system on a surface • Consider a point P on the
surface • Light arrives at P from a
hemisphere of directions defined by the surface normal N
• We can define a local coordinate system whose origin is P and with one axis aligned with N
• Convenient to represent in spherical angles.
P
N
CS252A, Fall 2012 Computer Vision I
Foreshortening
The surface is foreshortened by the cosine of the angle between the normal and direction to the light.
CS252A, Fall 2012 Computer Vision I
Measuring Angle
• The solid angle subtended by an object from a point P is the area of the projection of the object onto the unit sphere centered at P.
• Definition is analogous to projected angle in 2D • Measured in steradians, sr • If I’m at P, and I look out, solid angle tells me how much of
my view is filled with an object CS252A, Fall 2012 Computer Vision I
Solid Angle
• By analogy with angle (in radians), the solid angle subtended by a region at a point is the area projected on a unit sphere centered at that point
• The solid angle subtended by a patch area dA is given by
dω =dAcosθr2
CS252A, Fall 2012 Computer Vision I
Differential solid angle when representing point on sphere in spherical coordinates
Note: (θ,ϕ) are spherical angles in this slide, θ is not foreshortening.
• Power is energy per unit time
• Radiance: Power traveling at some point in a specified direction, per unit area perpendicular to the direction of travel, per unit solid angle
• Symbol: L(x,θ,φ)
• Units: watts per square meter per steradian : w/(m2sr1)
– CSE 252A
€
L =P
(dAcosα)dω
x
dA
α
dω
(θ, φ)
Power emitted from patch, but radiance in direction different from surface normal

6
CS252A, Fall 2012 Computer Vision I
Radiance transfer
From definition of radiance
What is the power received by a small area dA2 at distance r from a small area dA1 emitting radiance L?
€
L =P
(dAcosθ)dω
From definition of solid angle
dω =dAcosθr2
P = LdA1 cosθ1dω1−>2
=Lr2dA1dA2 cosθ1 cosθ2
• How much light is arriving at a surface?
• Units of irradiance: Watts/m2 • This is a function of incoming angle. • A surface experiencing radiance
L(x,θ,φ) coming in from solid angle dω experiences irradiance:
• Crucial property: Total Irradiance arriving at the surface is given by adding irradiance over all incoming angles Total irradiance is
N φ
L(x,θ,φ)
x x
θ
CSE 252A
What is image irradiance E for a radiance L emitted from a point P?
E
L
Solution is a substantial example problem.
CSE 252A
δA
δA’
A small patch on the surface δA will project to a small patch on the image δA’. Let δω be the solid angle subtended by δA (or δA’) from the center of the lens
δω
δω
We’ll use this later.
From solid angle equation
CSE 252A
δA
δA’
Let Ω be the solid angle subtended by the lens from P.
– CSE 252A, Winter 2007
δA
δA’
The power δP emitted from the patch δA with radiance L and falling on the lens is:
δP ultimately strikes δA’, and the irradiance δP/δA’ is

7
– CSE 252A, Winter 2007
Image Irradianc: Substitute in for δA/δA/ €
E =π4
dz'#
$ % &
' ( 2
cos4α*
+ ,
-
. / L
E: Image irradiance L: emitted radiance d : Lens diameter z’: depth of image plane α: Angle of patch from optical axis
δA
δA’
CSE 252A
€
E =π4
dz'#
$ % &
' ( 2
cos4α*
+ ,
-
. / L