Embed Size (px)
Citation preview
Benny Neeman
Leon Ribinik
27/01/2009

Our Goal – People Tracking
We would like to be able to track and distinguish the different people in a movie.
Why?
For security purposes. Collecting statistics – e.g. “How many
people visit the mall each day?”. Much more…

Our Approach
Most tracking algorithms try to track the whole person.
We think heads are enough:One head per person.Heads are pretty much rigid.Easier to detect a whole head without losing
parts of the blob.In occlusion of bodies the heads are mostly
the last to be occluded.

Simplifying the Problem
Our algorithm is highly dependent on different factors:Shooting angle.People density in the movie.Camera distance from the scene.General stuff: lighting, noise, etc.
We can use parameters to handle different conditions conditions.
How do we do it?
First, we detect the foreground and the meaningful foreground contours.
Then, we detect the heads as the local maximum of the foreground contours.
The local maximum’s contour is approximately the ellipse representing the head.
How do we do it?(2)
The contour of the neck changes its curvature when touching the shoulders this fact can be used to avoid false positives.
We use trajectories to trace heads between frames.

How do we do it?(3) To avoid false negatives (actual heads
not being detected) we use hysteresis with two thresholds.
The center of the detected head ellipse detected is tested to be part of the foreground.

Parameters Background threshold. Hysteresis threshold. Maximum head distance between
frames. Parameters for defining head size. Parameter to define trajectory memory. More parameters…
Difficulties We’ve Encountered Getting good enough foreground
contours to start working with. The contours of the edge detector are more accurate but are not continuous.
Some heads overlap the foreground so their contour is not part of the foreground - false negative.
Algorithm mistakes other body parts for heads – false positive.

Our Limitations

If We Had Another Semester…
Combining contours from edge detector to get more accurate edges and find heads which don’t belong to the foreground contour.
Finding a transition between the heads in multiple cameras.
Improving the algorithm so it’d work on more general input.

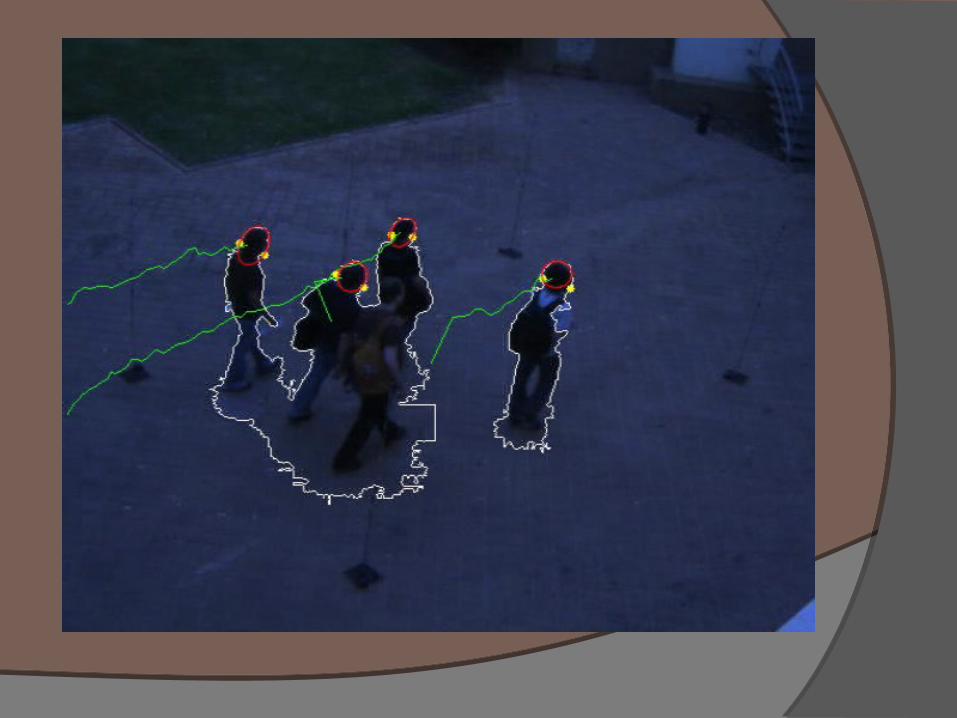
Demo
Summary
Combining numerous methods, we’ve managed to obtain a reasonable solution on a limited set of examples.
Expanding the algorithm to support generic input would require a lot of work and more methods.






















![Chris Brown - Beautiful People ft. Benny Benassi + [Lyrics On Screen]](https://img.pdfslide.us/doc/110x75/5556ccc9d8b42abb428b54ea/chris-brown-beautiful-people-ft-benny-benassi-lyrics-on-screen.jpg)