Embed Size (px)
Citation preview

Bayesian recursive variable selection
Li Ma
September 21, 2012
Abstract
We show that all model space priors for linear regression can be represented by a
recursive procedure that randomly adds variables into the model in a fashion analogous
to the classical forward-stepwise strategy. We show that this recursive representation
enjoys desirable properties that provide new tools for Bayesian inference. In partic-
ular, this representation transforms the computation of model space posteriors from
an integration problem to a recursion one. In high-dimensional problems, where ex-
act evaluation of the posterior is computationally infeasible, this enables one to infer
the structure of the posterior through computational strategies designed for approx-
imating recursions, without resorting to sampling algorithms such as Markov Chain
Monte Carlo. While sampling methods are powerful for exploring local structures of
the posterior but prone to poor mixing and convergence in high-dimensional spaces, our
approach can effectively identify the global structure of the posterior, which can then
be used either directly for inference or for suggesting good starting points for sampling
methods. In addition, the recursive representation also facilitates prior specifications
for incorporating structural features of the model space. For illustration, we show how
one may choose an appropriate prior to take into account model space redundancy
arising from strong correlation among predictors.
Keywords: Bayesian model selection, Bayesian model averaging, stochastic variable search,
dilution effect, high-dimensional inference, forward-stepwise selection.
1

1 Introduction
We consider variable selection in linear regression. Suppose the data are n observations with
p potential predictors and a response. Let Y = (y1, y2, . . . , yn) denote the response vector
and Xj = (x1j, x2j, . . . , xnj) the jth predictor vector for j = 1, 2, . . . , p. We consider linear
regression models of the form
Mγ : Y = 1nα + Xγβγ + ǫ
where 1n stands for an n-vector of “1”s; ǫ = (ǫ1, ǫ2, . . . , ǫn) is a vector of i.i.d. Gaussian noise
with mean 0 and variance 1/φ; γ = (γ1, γ2, . . . , γp) ∈ 0, 1p ≡ ΩM is the “model identifier”,
that is, a vector of indicators whose jth element γj = 1 if and only if the jth variable Xj
enters the model; Xγ and βγ represent the corresponding design matrix and coefficients.
Bayesian inference for model choice is based on the posterior probability for each of the
models under consideration, which is determined by
p(Mγ|Y ) =p(Mγ)p(Y |Mγ)
∑
γ p(Mγ)p(Y |Mγ)
where p(Mγ) is the prior probability assigned to model Mγ and p(Y |Mγ) is the marginal
likelihood under that model. In the current context of variable selection in linear regression,
p(Y |Mγ) =
∫
p(Y |θγ,Mγ)p(θγ|Mγ)dθγ
where θγ = (α,βγ, φ), representing the parameters under model Mγ and p(θγ|Mγ) is the
prior on these parameters given the model Mγ.
Recent decades have witnessed remarkable advance in the development of Bayesian vari-
able selection methods. The first studies on the choice of prior for model coefficients emerged
2
in the 1970’s and this topic has remained an active direction of research: see for example
Zellner (1971); Leamer (1978a,b); Zellner and Siow (1980); Zellner (1981, 1986); Stewart and
Davis (1986); Mitchell and Beauchamp (1988); Foster and George (1994); Kass and Wasser-
man (1995); George et al. (2000); Clyde and George (2000); Hansen and Yu (2001); Berger
and Pericchi (2001); Fernndez et al. (2001); Clyde and George (2004); Liang et al. (2008).
Tremendous progress has also been made in the development of algorithms for effectively
exploring the posterior distribution on the model space especially since the birth of Markov
Chain Monte Carlo (MCMC) methods such as Gibbs sampling and the Metropolis-Hastings
algorithm: see for example George and McCulloch (1993); Geweke (1996); Smith and Kohn
(1996); Clyde et al. (1996); George and McCulloch (1997); Raftery et al. (1997); Hoeting
et al. (1999); Jones et al. (2005); Hans et al. (2007); Clyde et al. (2011).
In comparison, less effort has been made in studying the choice of priors on the model
space p(Mγ), and the independence model (George and McCulloch, 1993; Chipman, 1996;
George and McCulloch, 1997; Raftery et al., 1997)
p(Mγ) =
p∏
i=1
wγi
i (1 − wi)1−γi (1)
where wi ∈ (0, 1) is the prior marginal inclusion probability of predictor Xi, has become a
popular choice mostly due to its simplicity. (Some recent exceptions include Li and Zhang
(2010) and George (2010).) For complex problems where it is hard to elicit prior information
on the wi’s, a common choice is to set wi ≡ w, e.g. w = 1/2, for all i.
Despite its popularity, inference using this simple independence prior on the model space
is unsatisfactory in several respects. First, this seemingly “non-informative” choice of the
prior in fact imposes strong assumptions on model complexity. In particular, it induces a
Binomial(p, w) on the model size—that is the number of predictors involved (Clyde and
George, 2004)—and favors large models when pw is large. One consequence of this on the
3
inference is the lack of control for multiple testing as pointed out recently by Scott and Berger
(2010). Empirical Bayes (George et al., 2000) and fully Bayes (Cui and George, 2008; Ley and
Steel, 2009; Carvalho and Scott, 2009) methods have been proposed to address this difficulty
by either estimating the value of w or placing a hyperprior on it. Second, it seems more
reasonable to allow the inclusion probability of each predictor given the others in the model
to depend on what those other predictors are. For example, when some predictors represent
the interactions of some other variables, one often wants to impose the constraint that the
inclusion probabilities of those “interaction” variables are non-zero only if the corresponding
main effects are included in the model. The independence prior does not allow specification
of such conditional inclusion probabilities.
A challenge faced by all existing Bayesian variable selection methods in high-dimensional
problems is efficient exploration of the posterior on model space. Almost all current meth-
ods are relying on sampling techniques such as Markov Chain Monte Carlo (MCMC) and
stochastic variable search (SVS) to achieve this goal. (For one exception, see Hans et al.
(2007).) The performance of these techniques for drawing models in high-dimensional situ-
ations, however, is hard to guarantee and to evaluate. They are efficient in exploring local
features of the posterior but are prone to being trapped locally instead of exploring the larger
landscape of the posterior. Consequently, it is desirable to have a way to more effectively
capture the global shape of the posterior—one can then couple it with sampling methods for
fine mapping of the posterior.
In this work we introduce a new perspective on Bayesian variable selection that offers solu-
tions to the aforementioned statistical and computational challenges in a principled manner.
The key to this perspective is an observation that all priors on model spaces in the regression
context, including of course the commonly adopted independence prior, can be represented
using a recursive constructive procedure that randomly generates models by adding variables
sequentially. This procedure is specified by two sets of parameters that respectively control
4
for model complexity and conditional inclusion probabilities of the predictors, facilitating
the incorporation of such prior information. Computationally, this representation allows the
posterior on model spaces to be calculated analytically through a sequence of recursions. In
high-dimensional problems, where exact evaluation of the posterior is computationally infea-
sible and sampling methods are typically inefficient, one can use this representation to learn
the general structure of the posterior using strategies designed for approximating recursions.
The rest of the work is organized as follows. In Section 2 we introduce the construction
of the recursive representation of model space priors. We show that this representation is
completely general—all model space priors (and posteriors) can be represented this way. We
then show how to carry out Bayesian inference with priors under this representation based
on a recipe for analytically computing posteriors through recursion. Next, we show that
this representation allows one to utilize computational strategies designed for approximating
recursions to infer the shape of the posterior in high-dimensional problems. Section 3 presents
several simulated and real data examples to illustrate its work. Additionally, in Section 4, we
carry out a case study that illustrates the flexibility of this representation for incorporating
model space structures. In particular, we provide an example showing how to incorporate
strong correlation among the predictors into account through prior specification under the
recursive representation. We conclude with some discussions in Section 5.
2 Methods
2.1 The forward-stepwise distribution
One way to construct a prior for Mγ, or equivalently one for γ, is by designing a random
mechanism that draws a model out of the collection of all possible models ΩM. In this
subsection we present such a procedure, and in the next we show its generality—all model
space priors can be constructed this way. Our proposed procedure starts from an initial model
5
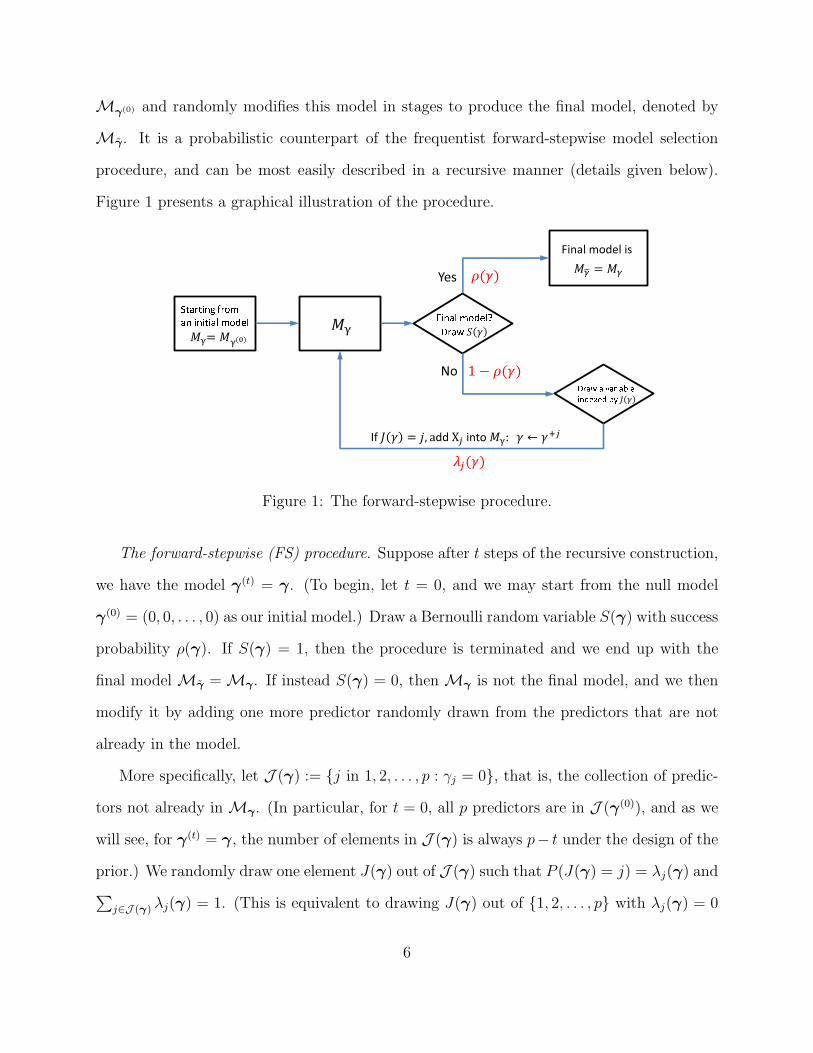
Mγ(0) and randomly modifies this model in stages to produce the final model, denoted by
Mγ. It is a probabilistic counterpart of the frequentist forward-stepwise model selection
procedure, and can be most easily described in a recursive manner (details given below).
Figure 1 presents a graphical illustration of the procedure.
Figure 1: The forward-stepwise procedure.
The forward-stepwise (FS) procedure. Suppose after t steps of the recursive construction,
we have the model γ(t) = γ. (To begin, let t = 0, and we may start from the null model
γ(0) = (0, 0, . . . , 0) as our initial model.) Draw a Bernoulli random variable S(γ) with success
probability ρ(γ). If S(γ) = 1, then the procedure is terminated and we end up with the
final model Mγ = Mγ. If instead S(γ) = 0, then Mγ is not the final model, and we then
modify it by adding one more predictor randomly drawn from the predictors that are not
already in the model.
More specifically, let J (γ) := j in 1, 2, . . . , p : γj = 0, that is, the collection of predic-
tors not already in Mγ. (In particular, for t = 0, all p predictors are in J (γ(0)), and as we
will see, for γ(t) = γ, the number of elements in J (γ) is always p− t under the design of the
prior.) We randomly draw one element J(γ) out of J (γ) such that P (J(γ) = j) = λj(γ) and∑
j∈J (γ) λj(γ) = 1. (This is equivalent to drawing J(γ) out of 1, 2, . . . , p with λj(γ) = 0
6
for all j /∈ J (γ).) If J(γ) = j, then we add Xj into Mγ to get a new model Mγ(t+1) . That is,
we let γ(t+1) = (γ(t+1)1 , γ
(t+1)1 , . . . , γ
(t+1)p ) be such that γ
(t+1)l = γl for all l 6= j and γ
(t+1)j = 1.
From now on we shall use γ+j to denote the indicator vector of this new model, where the
superscript “+j” stands for the additional inclusion of variable Xj into Mγ. This com-
pletes the (t + 1)th step of the recursive construction. The procedure then repeats itself on
γ(t+1) = γ+j, starting from the drawing of a stopping variable, until it eventually stops and
produces the final model Mγ. Note that if the procedure does not stop in the first p steps,
then it will reach the full model, γ(p) = γfull = (1, 1, . . . , 1). Because no further variables
can be added, we must have ρ(γfull) = 1 by design so the procedure always terminates.
Definition 1. A model Mγ, or equivalently a vector γ in 0, 1p, that arises from the
above random recursive procedure is said to have a forward-stepwise (FS) distribution. The
corresponding parameters for such a distribution are the stopping probability ρ(γ) and the
selection probabilities λ(γ) := λj(γ) : j ∈ J (γ), for each Mγ ∈ ΩM.
The stopping probabilities and the selection probabilities in the FS procedure characterize
two key aspects of model selection—the former on the size or complexity of the model
generated and the latter on the relevant predictors to be included, the order of their inclusion,
and the conditional inclusion probability given the variables already included in the model.
Later we will see through examples how we may incorporate prior information regarding
these aspects of the model through proper specification of these parameters.
2.2 Relationship to other model space priors
While the construction of the FS distribution seems quite peculiar, as is stated in the next
theorem, this class of distributions is actually as rich as it can possibly be: all probability
distributions—in particular all prior and posterior distributions—on the model space ΩM
belong to this class. Thus we lose no generality by considering Bayesian variable selection
7
with priors under the FS representation. (A proof is given in the Supplementary Materials.)
Theorem 1 (Generality of the FS distribution). All probability measures on ΩM are FS
distributions. That is, all distributions on ΩM can be represented by a FS procedure with the
corresponding parameters.
Remark: Note that this theorem only establishes the existence of an FS representation for
any given distribution on ΩM. It does not establish the uniqueness. In fact, different FS
procedures may give rise to the same model space distribution. To understand this, note that
the FS procedure generates samples on the “expanded model space” that incorporates the
order of variable inclusions. The induced FS distribution on ΩM is in essence the marginal
distribution on the model space after integrating out the different orderings.
Because the parameters ρ and λ directly correspond to two important aspects of model
selection decisions—model complexity and conditional inclusion probabilities of the predic-
tors, the FS representation can be used to motivate the choice of model space priors. For
example, a useful way to specify the prior stopping probabilities is to let ρ(γ) ≡ ρ|γ| where
|γ| denote the number of 1’s in γ or the number of predictors in Mγ. One could let ρs ≡ ρ,
a constant in [0, 1) for all s = 0, 1, 2, . . . p − 1. For values of ρ not too close to zero, this
imposes further parsimony over the size of the model than what is implicit through the use
of marginal likelihoods (Berger and Pericchi, 2001), as the total prior probability for models
including s predictors is ρ(1 − ρ)s for s < p and (1 − ρ)s for s = p. The prior expected size
of the model is thus (1/ρ − 1)[1 − (1 − ρ)p] which is decreasing in ρ and is close to 1/ρ − 1
for large p. To impose even stronger parsimony over the model size, one can let ρs be an
increasing function in s, such as ρs = 1 − e−as for some positive constant a.
Other choices for ρs can be used to incorporate different prior knowledge (or lack of
knowledge) about the model size. For example, if one believes that the actual model size is
between kmin and kmax where 0 ≤ kmin ≤ kmax ≤ p, but has no a priori reason to prefer any
one particular model size in this range over another, then one may wish to assign uniform
8

prior probability for the model size on the support kmin, kmin + 1, . . . , kmax. This can be
achieved by letting ρs = 0 for s < kmin, and ρs = 1/(kmax − s + 1) for kmin ≤ s ≤ kmax. In
particular, if one wishes to assign uniform prior probability on 0, 1, 2, . . . , p for the model
size, then one can let ρs = 1/(p − s + 1) for all s.
For the prior values of λj(γ), a simple choice is the uniform selection probabilities, that
is, to let λj(γ) ≡ 1/|J (γ)| for all j ∈ J (γ) and all γ ∈ Ωγ. This assumes no prior
knowledge about any particular predictor being more likely to be included than others. More
sophisticated choices of the prior selection probabilities may be used to take into account
the dependence structure among the predictors. For example, one may want to impose
the constraint that the conditional inclusion probability of a predictor that represents an
interaction be zero unless the corresponding main effects have been included in the model.
A more sophisticated example involves the so-called “dilution effect”, which arises from
strong correlation among the predictors as noted in George (1999) and George (2010). We
will devote Section 4 to illustrating how this effect can be accounted in the FS framework.
Note that if one adopts ρ(γ) ≡ ρ|γ| and the uniform values on λ(γ) as described above,
then by symmetry, the prior probability mass on each model of size t is
π(Mγ) = ρt
t−1∏
s=1
(1 − ρs)/
(
p
t
)
for all γ such that |γ| = t.
Any symmetric prior over ΩM—symmetric in the sense that any two models of the same
size receive equal prior probability—can thus be represented with appropriate choices of the
stopping probabilities ρ0, ρ1, . . . , ρp−1.
2.3 Bayesian variable selection with FS priors
Next we investigate how to draw inference using the FS representation for model space priors.
First note that one can of course still apply any of the existing methods for variable selection
9
based on sampling methods to a prior specified under the FS representation. But we will see
that the FS representation leads to an entirely new set of inferential tools that do not rely
on any sampling algorithms. More specifically, we will see that under the FS representation,
the posterior for any prior can be calculated analytically through a sequence of recursion.
The rest of this subsection is devoted to establishing this essential result.
Suppose a model Mγ is generated from an FS procedure. Also, suppose during the
corresponding recursive procedure, after t steps of recursion, we arrive at a model Mγ(t) =
Mγ. If S(γ) = 1, then Mγ = Mγ is the final model, and again we let θγ denote the
corresponding regression coefficients and variance, drawn from a prior p(θγ|Mγ). In this
case the likelihood under the final model is p(Y |θγ,Mγ). If instead S(γ) = 0, then Mγ
is not the final model. In this case, the final model Mγ, and thus the likelihood under it,
depends on further steps of the recursion procedure as characterized by the stopping and
selection variables.
The above description can be represented mathematically also in a recursive manner. For
any model Mγ of size t, we let q(γ|γ) denote the likelihood under the final model Mγ given
that the FS procedure does not terminate in the first t steps and the model reached at the
tth step is Mγ(t) = Mγ. Then we have
q(γ|γ) =
p(Y |θγ,Mγ) if S(γ) = 1 and the model coefficients are θγ
q(γ|γ+J(γ)) if S(γ) = 0 and the next variable to include is J(γ),
or equivalently,
q(γ|γ) = S(γ)p(Y |θγ,Mγ) + (1 − S(γ))q(γ|γ+J(γ)). (2)
10

Note that the likelihood q(γ|γ) is determined by γ along with the following sets of variables
Sγ⊂ = S(γ∗) for all Mγ∗ containing Mγ as a submodel
Jγ⊂ = J(γ∗) for all Mγ∗ containing Mγ as a submodel
θγ⊂ = θγ∗ for all Mγ∗ containing Mγ as a submodel.
That is, it depends on the stopping and selection variables along with the regression coeffi-
cients and variance for all models containing Mγ as a submodel.
Now we define Φ(γ) to be the marginal likelihood under the final model Mγ integrated
over the FS procedure given that the procedure does not stop in the first t steps and Mγ(t) =
Mγ. That is,
Φ(γ) =
∫ ∫
q(γ|γ)p(dθγ|Mγ)π(dMγ|γ(t) = γ)
=∑
γ:Mγ⊂Mγ
∫
q(γ|γ)p(dθγ|Mγ)π(Mγ|γ(t) = γ)
=∑
sγ⊂ , jγ⊂
∫
q(γ|γ)p(dθγ|Mγ)π(sγ⊂, jγ⊂) (3)
where π(·|γ(t) = γ) denotes the model space prior conditional on that the FS procedure
does not terminate in the first t steps and γ(t) = γ, and it is determined by the prior on
(Sγ⊂,Jγ⊂) denoted by π(sγ⊂, jγ⊂). The last summation is taken over all possible values of
Sγ⊂ and Jγ⊂.
Eqs. (2) and (3) together give rise to a recursive representation of Φ(γ)
Φ(γ) = ρ(γ)p(Y |Mγ) + (1 − ρ(γ))∑
j∈J (γ)
λj(γ)Φ(γ+j), (4)
with the convention that if γ = (1, 1, . . . , 1), the full model, then ρ(γ) = 1 and so Φ(γ) =
11
p(Y |Mγ). Note that in order to carry out this recursion, the marginal likelihood term
p(Y |Mγ) under each Mγ needs to be available. (To this end, convenient choices for the
conditional prior of the regression coefficients include the g-prior (Zellner, 1986) and the
hyper-g prior (Liang et al., 2008). We will adopt these choices in the numerical exam-
ples. More generally one may apply methods such as Laplace’s approximation to calculate
P (Y |Mγ) if other priors for the coefficients are adopted.)
But why do we even care about the Φ(γ) terms? They allow us analytically compute
any model space posterior through recursion! The recipe for achieving this is given in the
following theorem. (A proof is given in the Supplementary Materials.)
Theorem 2 (FS representation of a model space posterior). An FS representation for any
model space posterior can be computed analytically based on an FS representation for the
corresponding prior. Specifically, if the prior can be represented by an FS procedure with
parameters ρ and λ, then the posterior can be represented as follows. For each Mγ ∈ ΩM,
1. Posterior stopping probability:
ρpost(γ) = ρ(γ)p(Y |Mγ)/Φ(γ),
2. Posterior selection probabilities:
λpostj (γ) =
(1 − ρ(γ)) λj(γ)Φ(γ+j)
Φ(γ) − ρ(γ)p(Y |Mγ).
Remark: This theorem gives an analytic representation of the corresponding posterior distri-
bution. It allows us to compute the posterior exactly through the recursion formula Eq. (4),
to sample from this posterior directly by simulating the FS procedure with the updated
parameters, and to compute certain summary statistics analytically without using sampling
at all. These will be illustrated in our numerical examples.
12
Eq. (4) and Theorem 2 can be written in terms of Bayes factors (BFs) with respect to
a base model Mγb. Specifically, if we let Φb(γ) = Φ(γ)/P (Y |Mγb
) and BF(Mγ : Mγb) =
P (Y |Mγ)/P (Y |Mγb), then Eq. (4) becomes
Φb(γ) = ρ(γ)BF(Mγ : Mγb) + (1 − ρ(γ))
∑
j∈J (γ)
λjΦb(γ+j).
Accordingly, the posterior parameter updates in Theorem 2 becomes
ρpost(γ) = ρ(γ)BF(Mγ : Mγb)/Φb(γ) and λpost
j (γ) =(1 − ρ(γ))λj(γ)Φb(γ
+j)
Φb(γ) − ρ(γ)BF(Mγ : Mγb).
Thus one can carry out Bayesian variable selection using priors under the FS representation
completely in terms of the BFs. This will become very handy as it is often easier to compute
the BFs with respect to a baseline model than to compute the marginal likelihoods. (See
Section 3.1.) A simple choice of the baseline model is the null model. We will use this choice
in the rest of this work without further declaration.
2.4 Computational strategies in high-dimensional problems
Computing the exact model space posterior requires enumerating all models, as well as com-
puting and summing the marginal likelihood or Bayes factor for each of them. When the
number of potential predictors p is large (> 30), such brute-force integration is infeasible.
Traditionally, sampling methods such as MCMC are then employed to approximate the
integral through simulation. In a different vein, the FS representation through Eq. (4) con-
verts the problem of integration into one of recursion. Consequently, many computational
strategies for approximating recursive computation on trees can be adopted to effectively
approximate the posterior in high-dimensional problems. These strategies form an alterna-
tive to sampling algorithms such as MCMC and SVS for posterior inference, and hold much
13

promise for Bayesian analysis in high-dimensional settings. While sampling algorithms are
effective in exploring local details of the posterior distribution, approximate recursion algo-
rithms provide a means to learning the global shape of the posterior while avoiding difficulties
in mixing and convergence. When combined, the two types of algorithms can form a powerful
set of Bayesian armory for exploring large multi-modal posterior distributions.
One of the simplest approaches for approximating a recursion is to impose an upper limit
k on the depth of the recursion. We shall refer to this method as k-thresholding. In the
current context, this can be achieved by restricting the support of the prior to models of size
no more than k—simply let ρ(γ) = 1 for each model Mγ of size k. When the underlying
model indeed involves no more than k predictors (essentially a sparsity assumption), such an
assumption will actually result in a gain in statistical power in selecting the “true” model. If
otherwise, the “true” model falls out of the support of the posterior, but the method will still
identify relevant sub-models of size no more than k. If desired, one may then keep all the
variables with moderate to high marginal inclusion probabilities as estimated by draws from
the approximate posterior, (which effectively serves as a dimensionality reduction step,) and
carry out another round of selection on that sub-space of models spanned by these “candidate
variables” with a larger model size limit.
A more involved approximation technique, the k-step look-ahead, is a generalization of
k-thresholding. More specifically, one can start by imposing a size limit k on the support of
the FS procedure. After computing the corresponding posterior through a k-level recursion,
one can identify one or a small number of candidate “representative” models that receive high
posterior probability. One can then place a new “local” prior under the FS representation
with size limit k further along the branch of each of those models, and carry out another
iteration of k-level recursion to find its posterior. This procedure continues until the local FS
posteriors suggest termination through the posterior stopping probabilities. The reasoning
behind this algorithm is that large models typically involve good sub-models. Through this
14

procedure, one can effectively zoom into the parts of the model space that are likely to
receive the highest posterior probability.
Two examples of such k-step look-ahead procedures are given in the following boxes as
Algorithm 1 and Algorithm 2. How they work is illustrated in the next section through
Example 3. In the description of Algorithms 1 and 2, S denotes the set of predictors se-
lected by the algorithm, V the rest of the predictors, ΩVM the model space spanned by the
predictors in V , and ΩVM(k) the subset of models in ΩV
M of size no more than k. Algorithm 1
uses the hierarchical maximum a posteriori (hMAP) model (Wong and Ma, 2010) as the
“representative” model in each k-level recursion. (For the definition of the hMAP and the
motivation to use it instead of the more common MAP model, see Supplementary Materials.)
Algorithm 2 is a variant that adds only one additional variable in each k-level recursion. It
is computationally more demanding than Algorithm 1 but less aggressive in approximation.
Algorithm 1 k-step look-ahead variable selection using stepwise hMAP
1: Initialization: S ← ∅, V ← 1, 2, . . . , p.2: Demean: yi ← yi − y, xij ← xij − x·j for all i = 1, 2, . . . , n and j ∈ V .3: k-thresholding: Place an FS-prior on ΩV
M supported on ΩVM(k).
4: Compute the posterior FS distribution by recursions as prescribed in Eq. (4) and Theo-rem 2.
5: Find the hMAP model MVγhMAP .
6: Scurr ← variables in MVγhMAP , V ← V \Scurr, and S ← S ∪ Scurr.
7: if |Scurr| = k and |S| < p then
8: for each j ∈ V do
9: Regress predictor Xj on the variables in Scurr.10: Update xij ← eij, the corresponding residual, for each i = 1, 2, . . . , n.11: Regress Y on the variables in Scurr.12: Update yi ← ei, the corresponding residual, for each i = 1, 2, . . . , n.13: end for
14: Go to Step 3.15: else
16: The algorithm terminates and returns S.17: end if
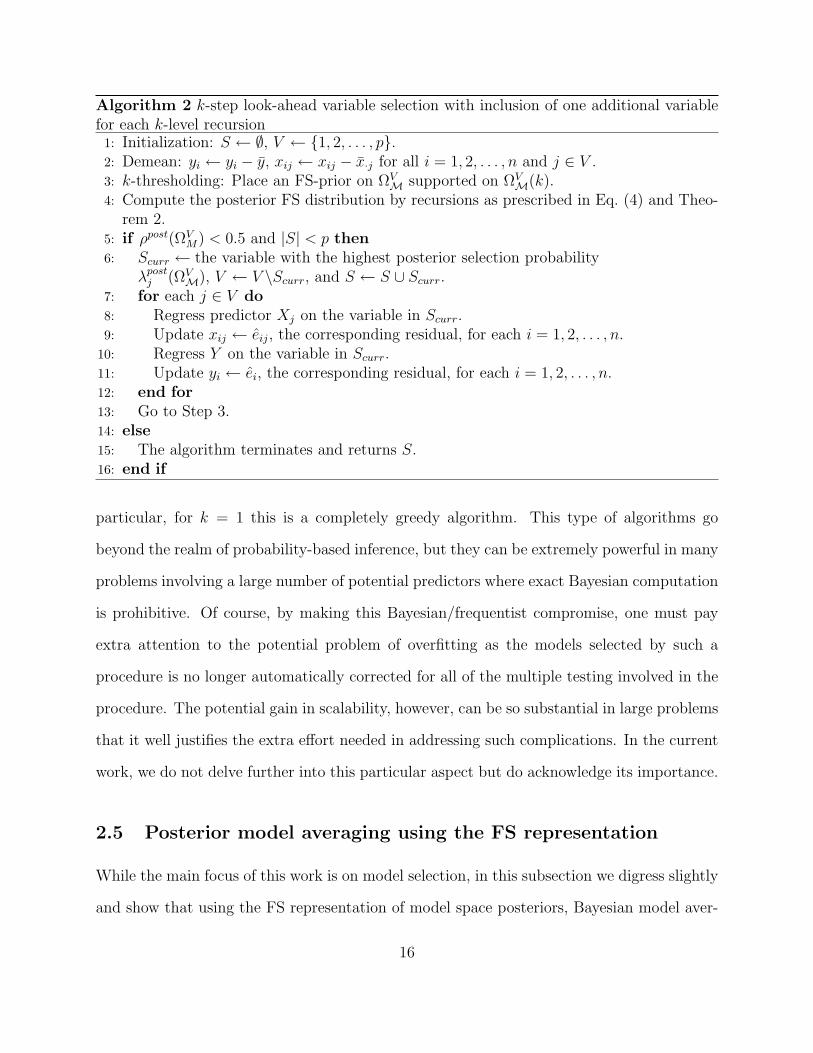
The k-step look-ahead is greedy to varying degrees depending on the choice of k. In
15
Algorithm 2 k-step look-ahead variable selection with inclusion of one additional variablefor each k-level recursion1: Initialization: S ← ∅, V ← 1, 2, . . . , p.2: Demean: yi ← yi − y, xij ← xij − x·j for all i = 1, 2, . . . , n and j ∈ V .3: k-thresholding: Place an FS-prior on ΩV
M supported on ΩVM(k).
4: Compute the posterior FS distribution by recursions as prescribed in Eq. (4) and Theo-rem 2.
5: if ρpost(ΩVM) < 0.5 and |S| < p then
6: Scurr ← the variable with the highest posterior selection probabilityλpost
j (ΩVM), V ← V \Scurr, and S ← S ∪ Scurr.
7: for each j ∈ V do
8: Regress predictor Xj on the variable in Scurr.9: Update xij ← eij, the corresponding residual, for each i = 1, 2, . . . , n.
10: Regress Y on the variable in Scurr.11: Update yi ← ei, the corresponding residual, for each i = 1, 2, . . . , n.12: end for
13: Go to Step 3.14: else
15: The algorithm terminates and returns S.16: end if
particular, for k = 1 this is a completely greedy algorithm. This type of algorithms go
beyond the realm of probability-based inference, but they can be extremely powerful in many
problems involving a large number of potential predictors where exact Bayesian computation
is prohibitive. Of course, by making this Bayesian/frequentist compromise, one must pay
extra attention to the potential problem of overfitting as the models selected by such a
procedure is no longer automatically corrected for all of the multiple testing involved in the
procedure. The potential gain in scalability, however, can be so substantial in large problems
that it well justifies the extra effort needed in addressing such complications. In the current
work, we do not delve further into this particular aspect but do acknowledge its importance.
2.5 Posterior model averaging using the FS representation
While the main focus of this work is on model selection, in this subsection we digress slightly
and show that using the FS representation of model space posteriors, Bayesian model aver-
16

aging (BMA) (Hoeting et al., 1999), which is essentially integration over the posterior, can
also be carried out through recursion. We let ∆ denote a quantity of interest. BMA is based
on the posterior distribution of ∆:
P (∆|Y ) =∑
γ
P (∆|Y ,Mγ)P (Mγ|Y ),
and in particular its posterior expectation
E(∆|Y ) =∑
γ
E(∆|Y ,Mγ)P (Mγ|Y ).
Under an FS representation of the posterior, these two formulas have a recursive represen-
tation as well. To see this, we first define, for each model Mγ, a quantity Ψ(γ) to be the
posterior expectation of ∆ given that Mγ arises during the random procedure that generates
the final model after |γ| steps. Then
Ψ(γ) = ρpost(γ)E(∆|Y ,Mγ) +(
1 − ρpost(γ))
∑
j∈J (γ)
λpostj (γ)Ψ(γ+j). (5)
Note that E(∆|Y ) = Ψ(γ(0)) and so it can be calculated recursively according to Eq. (5). It
follows that the posterior distribution P (∆|Y ) can also be computed this way by setting ∆
to the appropriate indicator function. Therefore, to carry out BMA, we can first use Theo-
rem 1 to recursively compute the corresponding posterior FS representation, then use Eq. (5)
to again recursively compute the model averaged quantities. Note that the existence of such
a recursive representation of BMA suggests that the computational strategies for approxi-
mating recursions introduced previously can also be adopted for carrying out approximate
BMA in high-dimensional problems.
Example 1 (BMA estimation of marginal inclusion probabilities). In this example we use
17
the above recipe to evaluate the posterior marginal inclusion probability of a variable Xi. In
this case, we let ∆ be the indicator for the event Xi is in the final model. For any model
Mγ, we define Ψ(γ) as in Eq. (5). Note that if Mγ contains Xi, then Eq. (5) reduces to
Ψ(γ) = 1. On the other hand, if Mγ does not contain Xi, then E(∆|Y ,Mγ) = 0, and so
Ψ(γ) =(
1 − ρpost(γ))
∑
j∈J (γ)
λpostj (γ)Ψ(γ+j)
=(
1 − ρpost(γ))
λposti (γ) +
∑
j∈J (γ)\i
λpostj (γ)Ψ(γ+j)
.
By the above recursion, we can calculate Ψ(γ(0)), which is exactly the posterior marginal
inclusion probability for variable Xi.
Remark: While the above example shows that marginal inclusion probabilities can be com-
puted recursively under the proposed framework, it does not suggest that this is the most
efficient way to evaluate those probabilities, especially when there are a large number of
potential variables and the investigator wants to evaluate the inclusion probability for each.
An alternative approach is to sample models from the posterior FS procedure, and estimate
the inclusion probabilities using the sample averages. Although some Monte Carlo error will
be introduced, sampling can be a much more efficient approach when there are many predic-
tors. For this reason, in our later numerical examples, we use sampling from the posterior
to estimate the marginal inclusion probabilities.
3 Numerical examples
In this section we use several numerical examples to illustrate variable selection using priors
under the FS representation. We adopt the g-prior and the hyper-g prior on the regression
coefficients and the noise variance given a model Mγ. Such choices are made due to the
18

availability of closed-form marginal likelihoods, P (Y |Mγ), and BFs. First we provide some
brief background in how the marginal likelihood and BFs are computed for the g-prior and
the hyper-g prior. We refer the interested reader to Liang et al. (2008) for more detail.
3.1 Bayes factors under g-prior and hyper-g prior
Given a particular model Mγ, Zellner’s g-prior in its most popular form is the following
prior on the regression coefficients and the noise variance
p(φ) ∝ 1/φ and βγ|φ,Mγ ∼ N(β0γ, g(XT X)−1/φ)
where β0γ and g are hyperparameters. Following the exposition in Liang et al. (2008), we
assume without loss of generality that the predictor variables X1, X2, . . . , Xp have all
been mean centered at zero. Then we can place a common non-informative flat prior on the
intercept α for all models. So p(α, φ) ∝ 1/φ. Under this prior setup, the marginal likelihood
for model Mγ is
p(Y |Mγ) =Γ((n − 1)/2)√
π(n−1)√
n
(
n∑
i=1
(yi − y)2
)−(n−1)/2
· (1 + g)(n−1−|γ|)/2
(
1 + g(1 − R2γ)
)(n−1)/2
where R2γ is the coefficient of determination for model Mγ. If we choose our baseline model
Mγbto be the null model—that is γb = (0, 0, . . . , 0). Then the Bayes factor for a model Mγ
versus Mγbis
BF(Mγ : Mγb) =
(1 + g)(n−1−|γ|)/2
(
1 + g(1 − R2γ)
)(n−1)/2.
Due to the simplicity of the BF in comparison to the marginal likelihood, we will carry out
the inference through Theorem 2 in terms of the BFs.
To avoid undesirable features of the g-priors such as Barlett’s paradox and the informa-
tion paradox (Berger and Pericchi, 2001), Liang et al. (2008) proposed the use of mixtures
19

of g-priors. In particular, they introduced the hyper-g prior, which adopts the following
hyperprior on g:
g
1 + g∼ Beta(1, a/2 − 1).
This prior also renders a closed form representation for the model-specific marginal likelihood,
and thus for the corresponding BFs. In particular, Liang et al. (2008) showed that the BF
of a model Mγ versus the null model Mγbis given by
BF(Mγ : Mγb) =
a − 2
|γ| + a − 2· 2F1
(
(n − 1)/2, 1; (|γ| + a)/2; R2γ
)
where 2F1(·, ·; ·; ·) is the hypergeometric function. More specifically, in the notations of Liang
et al. (2008),
2F1(a, b; c; z) =Γ(c)
Γ(b)Γ(c − b)
∫ 1
0
tb−1(1 − t)c−b−1
(1 − tz)adt.
Programming libraries are available for evaluating this function (Liang et al., 2008).
3.2 Examples
Example 2 (US Crime data). This is a classical data set introduced in Vandaele (1978)
and adopted in many articles including Raftery et al. (1997) and Clyde et al. (2011) to
compare methods for model selection and averaging. This data set contains 15 variables and
so an exhaustive computation of the marginal likelihood of all 215 models is possible. We
place a prior under the FS representation on this model space with constant prior stopping
probability ρs ≡ 0.5 for all s = 0, 2, . . . , p − 1 and uniform prior selection probabilities,
together with a g-prior with g = n on the coefficients for each model. After computing the
corresponding posterior FS representation, we randomly draw from this posterior—through
simulating the FS procedure—10,000 models, and use the sample average to estimate the
marginal inclusion probability of each predictor.
20
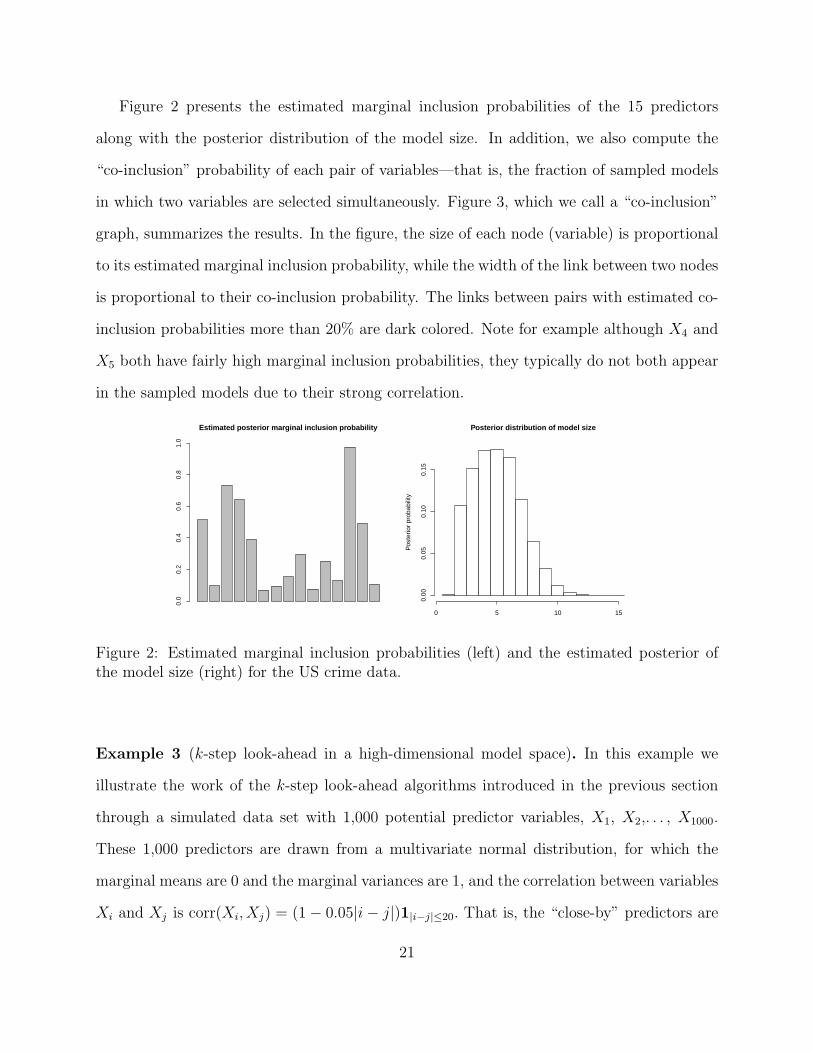
Figure 2 presents the estimated marginal inclusion probabilities of the 15 predictors
along with the posterior distribution of the model size. In addition, we also compute the
“co-inclusion” probability of each pair of variables—that is, the fraction of sampled models
in which two variables are selected simultaneously. Figure 3, which we call a “co-inclusion”
graph, summarizes the results. In the figure, the size of each node (variable) is proportional
to its estimated marginal inclusion probability, while the width of the link between two nodes
is proportional to their co-inclusion probability. The links between pairs with estimated co-
inclusion probabilities more than 20% are dark colored. Note for example although X4 and
X5 both have fairly high marginal inclusion probabilities, they typically do not both appear
in the sampled models due to their strong correlation.
Estimated posterior marginal inclusion probability
0.0
0.2
0.4
0.6
0.8
1.0
Posterior distribution of model size
Model size
Pos
terio
r pr
obab
ility
0 5 10 15
0.00
0.05
0.10
0.15
Figure 2: Estimated marginal inclusion probabilities (left) and the estimated posterior ofthe model size (right) for the US crime data.
Example 3 (k-step look-ahead in a high-dimensional model space). In this example we
illustrate the work of the k-step look-ahead algorithms introduced in the previous section
through a simulated data set with 1,000 potential predictor variables, X1, X2,. . . , X1000.
These 1,000 predictors are drawn from a multivariate normal distribution, for which the
marginal means are 0 and the marginal variances are 1, and the correlation between variables
Xi and Xj is corr(Xi, Xj) = (1 − 0.05|i − j|)1|i−j|≤20. That is, the “close-by” predictors are
21
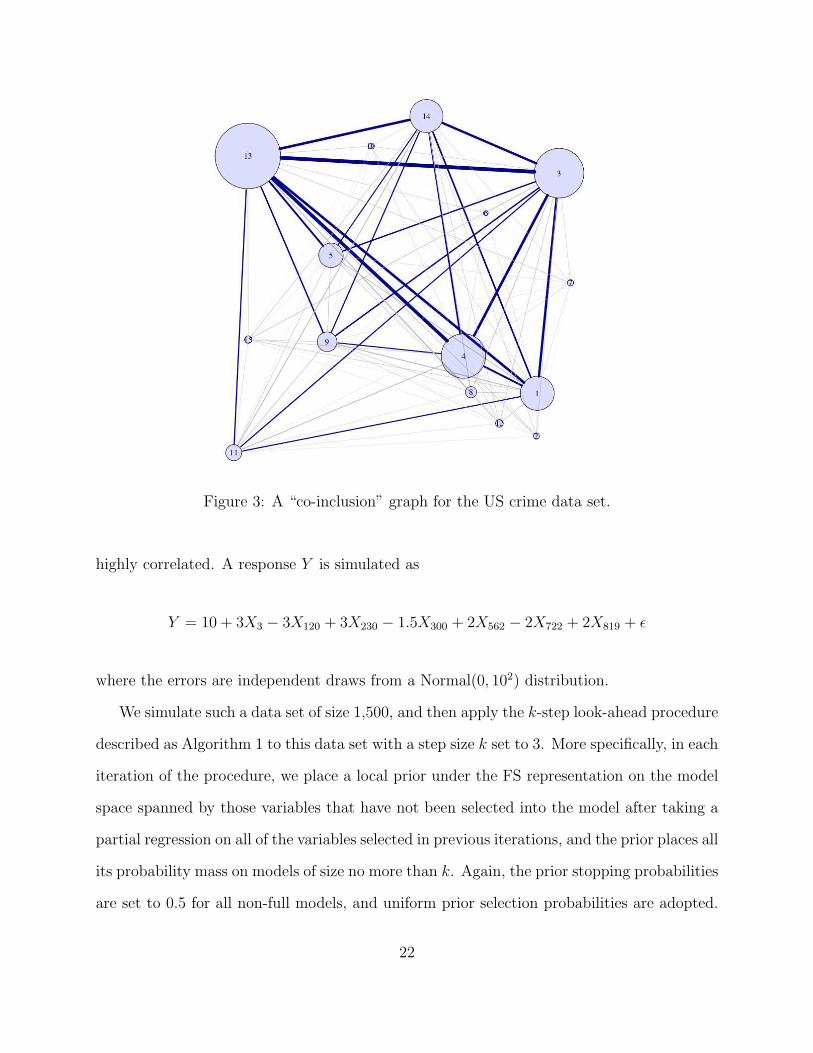
Figure 3: A “co-inclusion” graph for the US crime data set.
highly correlated. A response Y is simulated as
Y = 10 + 3X3 − 3X120 + 3X230 − 1.5X300 + 2X562 − 2X722 + 2X819 + ǫ
where the errors are independent draws from a Normal(0, 102) distribution.
We simulate such a data set of size 1,500, and then apply the k-step look-ahead procedure
described as Algorithm 1 to this data set with a step size k set to 3. More specifically, in each
iteration of the procedure, we place a local prior under the FS representation on the model
space spanned by those variables that have not been selected into the model after taking a
partial regression on all of the variables selected in previous iterations, and the prior places all
its probability mass on models of size no more than k. Again, the prior stopping probabilities
are set to 0.5 for all non-full models, and uniform prior selection probabilities are adopted.
22
A hyper-g prior with a = 3 is placed on the coefficients given each model. After computing
the corresponding posterior FS distribution through recursion, the variables present in the
hMAP model found at each iteration are added into the set of selected variables. Thus
in each iteration at most k variables can be selected. If the hMAP model at an iteration
reaches the maximum size k, then the procedure takes the next iteration and places a new
FS-prior on the model space spanned by the variables not yet selected after taking the partial
regression on the ones already included. This procedure terminates when the hMAP model
at an iteration falls short of the maximum size supported by the prior or the full model has
been reached.
For the current example, the k-step look-ahead terminated after three iterations. In
the first iteration, the hMAP model contains variables X3, X120 and X231. In the second
iteration, variables X560, X722, and X819 are added into the model. Finally, in the third
iteration, a single variable X300 is added and the procedure terminates. (The entire process
took about 5 minutes on a single Intel Core i7 CPU core at 3.8Ghz.) So the “best” model
this procedure selects is Y ∼ X3 + X120 + X231 + X300 + X560 + X722 + X819.
Due to the strong correlation among neighboring markers in this particular simulation
the procedure chose X231 and X560 instead of X230 and X562, but the selected model is indeed
very close to the underlying truth. Note that the algorithm automatically terminated after
three iterations of k-level recursion and the inclusion of the seven relevant variables into the
model. The relevant predictors (or their immediate neighbors) are identified by the algorithm
in an order matching their corresponding effect sizes.
In addition to finding a single representative model, we can also estimate the inclusion
probabilities of the variables as follows. At each iteration of k-step look-ahead, given those
already selected in the previous iterations, we sample 1,000 models from the k-thresholded
posterior FS-distribution on the model space spanned by the variables not yet selected.
These are then used to estimate the conditional inclusion probabilities of the variables given
23

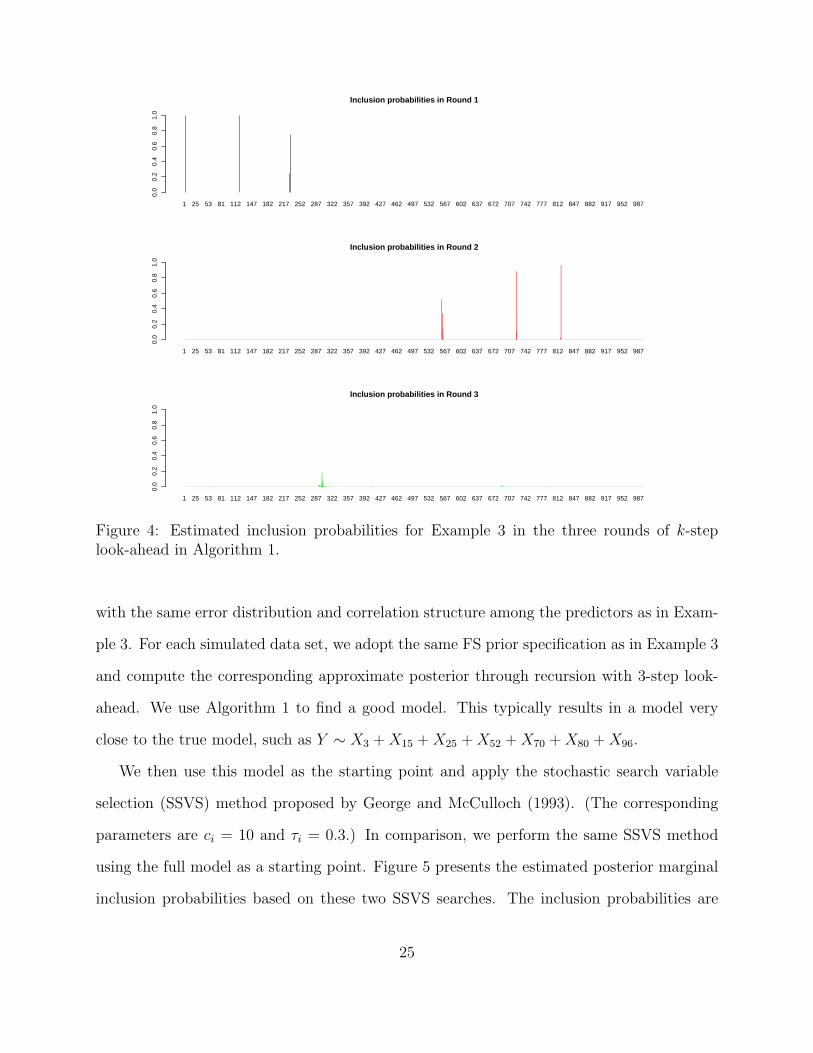
the variables selected in previous steps. We compute the conditional inclusion probability
for each variable not yet in the model in each iteration. The estimated conditional inclusion
probabilities are presented in Figure 4. Due to the correlation among the predictors, the
neighbors of the true predictors of the response also have moderate inclusion probabilities.
Looking at the lower panel in Figure 4, it may seem surprising that in the third iteration
of the k-step algorithm, despite the relatively low inclusion probabilities of all the avail-
able predictors, the algorithm was able to identify X300 in the hMAP model. This shows a
desirable aspect of inference using the FS representation. Although due to the strong cor-
relation among the predictors there are no predictors that stand out as should be included
with high probability, the recursive framework through Eq. (4) allows us to combine the
evidence for the inclusion of an additional predictor from all the neighbors around X300.
As a result, the posterior stopping probability on the model reached after two iterations,
Y ∼ X3 + X120 + X231 + X560 + X722 + X819, is small—about 32%, suggesting the inclusion
of another predictor, and then X300 is chosen as it has the highest conditional inclusion
probability among the variables not in the model. We have also applied Algorithm 2 to the
same simulated data set. The result is very similar and so is not reported here to avoid
redundancy. The performance of the algorithms is consistent across repeated simulations.
Our next example illustrates that one can combine the recursive approach with the stan-
dard sampling methods for inference. In particular, given the model chosen by our method
as a starting point, one can start his/her favorite sampling-based algorithms such as MCMC
or SVS to further explore the posterior around this model. This helps ensure that the chain
starts in a region of “good” models.
Example 4. We simulate data sets of size 1,000 with 100 predictors from the model:
Y = 10 + 3X3 − 3X15 + 3X25 − 1.5X50 + 2X70 − 2X80 + 2X95 + ǫ
24
1 25 53 81 112 147 182 217 252 287 322 357 392 427 462 497 532 567 602 637 672 707 742 777 812 847 882 917 952 987
Inclusion probabilities in Round 1
0.0
0.2
0.4
0.6
0.8
1.0
1 25 53 81 112 147 182 217 252 287 322 357 392 427 462 497 532 567 602 637 672 707 742 777 812 847 882 917 952 987
Inclusion probabilities in Round 2
0.0
0.2
0.4
0.6
0.8
1.0
1 25 53 81 112 147 182 217 252 287 322 357 392 427 462 497 532 567 602 637 672 707 742 777 812 847 882 917 952 987
Inclusion probabilities in Round 3
0.0
0.2
0.4
0.6
0.8
1.0
Figure 4: Estimated inclusion probabilities for Example 3 in the three rounds of k-steplook-ahead in Algorithm 1.
with the same error distribution and correlation structure among the predictors as in Exam-
ple 3. For each simulated data set, we adopt the same FS prior specification as in Example 3
and compute the corresponding approximate posterior through recursion with 3-step look-
ahead. We use Algorithm 1 to find a good model. This typically results in a model very
close to the true model, such as Y ∼ X3 + X15 + X25 + X52 + X70 + X80 + X96.
We then use this model as the starting point and apply the stochastic search variable
selection (SSVS) method proposed by George and McCulloch (1993). (The corresponding
parameters are ci = 10 and τi = 0.3.) In comparison, we perform the same SSVS method
using the full model as a starting point. Figure 5 presents the estimated posterior marginal
inclusion probabilities based on these two SSVS searches. The inclusion probabilities are
25

0 20 40 60 80 100
0.0
0.2
0.4
0.6
0.8
1.0
Predictor
Est
imat
ed m
argi
nal i
nclu
sion
pro
babi
lity
0 20 40 60 80 100
0.0
0.2
0.4
0.6
0.8
1.0
Figure 5: Estimated posterior marginal inclusion probabilities based on two SSVS searches.The solid curve is for the SSVS with the model selected by Algorithm 1 as the starting point.The dashed curve is for the SSVS with the full model as the starting point. The light verticallines indicate the seven predictors in the true model.
estimated based on 2,000 Gibbs iterations with an additional 1,000 burn-in iterations for the
SSVS starting from the full model. While the strong correlation structure makes stochastic
model search very challenging in this example, we can see that the chain that started at the
model selected by our method performs better in terms of sampling around the true model.
We find that if we keep running SSVS chains long enough then the effect of a good starting
point becomes less significant as one would expect. Thus the higher the dimensionality is,
the more important the benefit of a good starting point brings as it will take longer for the
SSVS to get to regions of good models, and take even longer to get reliable estimates of the
inclusion probabilities. We note that Algorithm 1 with 3-step look-ahead takes about two
seconds in this example on a single 3.8Ghz Intel Core-i7 CPU core.
4 Case study: Incorporating model space redundancy
In this subsection we carry out a case study to show that the FS representation of model
space priors provides much flexibility in incorporating prior information. In particular, we
show how one can address an interesting phenomenon called the dilution effect first noted by
26
George (1999). “Dilution” occurs when there is redundancy in the model space. More specif-
ically, consider the scenario where there is strong correlation among some of the predictors,
and any one of these predictors captures virtually all of the association between them and
the response. In this case models that contain different members of this class but are other-
wise identical are essentially the same. As a result, if, say, a symmetric prior specification is
adopted, these models will receive more prior probability than they properly should. At the
same time, other models that do not include members of this class will be down-weighted
in the prior. In real data, this phenomenon occurs to varying degrees depending on the
underlying correlation structure among the predictors.
Next, we present a very simple specification of the FS procedure producing a prior that
can effectively address this phenomenon. We do not claim that this approach is the “best”
way to deal with dilution, but rather use this as an example to illustrate the flexibility
rendered by the FS representation. The specification can be described in two steps.
Step I. Pre-clustering the predictors based on their correlation. First, we carry out a
hierarchical clustering over the predictor variables using the (absolute) correlation as the
similarity metric, which divides the predictors into K clusters—C1, C2, . . . , CK . We recom-
mend using complete linkage as this will ensure that the variables within each cluster are all
very “close” to each other. One needs to choose a correlation threshold s for cutting the cor-
responding dendrogram into clusters—in the case of complete linkage, this is the minimum
correlation for two variables to be in the same cluster. We recommend choosing a large s,
such as 0.9, to place variables into the same basket only if they are highly correlated.
Step II. Specification of the FS prior given the predictor clusters. Based on the predictor
clusters, we assign prior selection probabilities for a model Mγ to the variables not yet in
the model in the following manner. First, we place equal total prior selection probability
over each of the available clusters. Then within each cluster, we assign selection probability
evenly across the variables.
27

For example, consider the situation where there are a total of 10 predictors X1 through
X10, and following Step I, they form four clusters C1 = X1, X2, X3, C2 = X4, X10,
C3 = X5, X7, X9 and C4 = X6, X8. Let Mγ be the model that contains variables X1,
X4, X5, X6, and X8. That is, γ = (1, 0, 0, 1, 1, 1, 0, 1, 0, 0). If the FS procedure reaches Mγ
and the procedure does not stop, that is, S(γ) = 0, then five variables, X2, X3, X7, X9, X10,
from three clusters C ′1 = X2, X3, C ′
2 = X4, and C ′3 = X5 are available for further
inclusion. In this case we choose the selection probabilities λ(γ) to be: λ1(γ) = λ4(γ) =
λ5(γ) = λ6(γ) = λ8(γ) = 0, λ2(γ) = λ3(γ) = 1/3 × 1/2 = 1/6, λ4 = 1/3 and λ5 = 1/3.
Under such a specification, the predictors falling in the same cluster evenly share a fixed
piece of the prior selection probability, which ensures that the prior weight on the other
variables are not “diluted”.
Example 5. We simulate a data set with 60 predictors X1, X2, . . . , X60. They have the
following correlation structure:
corr(Xi, Xj) =
1 − 0.01|i − j| if i = j or maxi, j ≤ 50
0 if i 6= j and maxi, j > 50.
In other words, there is strong correlation among the first 50 predictors X1, X2, . . . , X50
while each of the other 10 variables is independent of all other predictors. We simulate a
response variable Y = 10+4X3 +3X60 + ǫ with ǫ being independent N(0, 102) noise. Due to
the high correlation among X1 through X50, many models that contain different subsets of
them but are otherwise identical are essentially the same. If a symmetric prior specification
is adopted then these models will receive too large a proportion of the prior probability mass.
For example, the first 50 variables possess 5/6 of the prior selection probability to be added
into the null model, while the “effective” number of predictors among them is much smaller.
Consequently, variables X51 to X60 will receive much less prior selection probability than they
28
609 10 7 8 1 2 3 4 5 6
18 19 20 21 22 17 15 16 13 14 11 12 34 35 30 31 32 33 29 27 28 23 24 25 26 47 45 46 50 48 49 38 39 36 37 43 44 42 40 4154 56
5753 58
52 5951 55
10.
80.
60.
40.
20
Cor
rela
tion
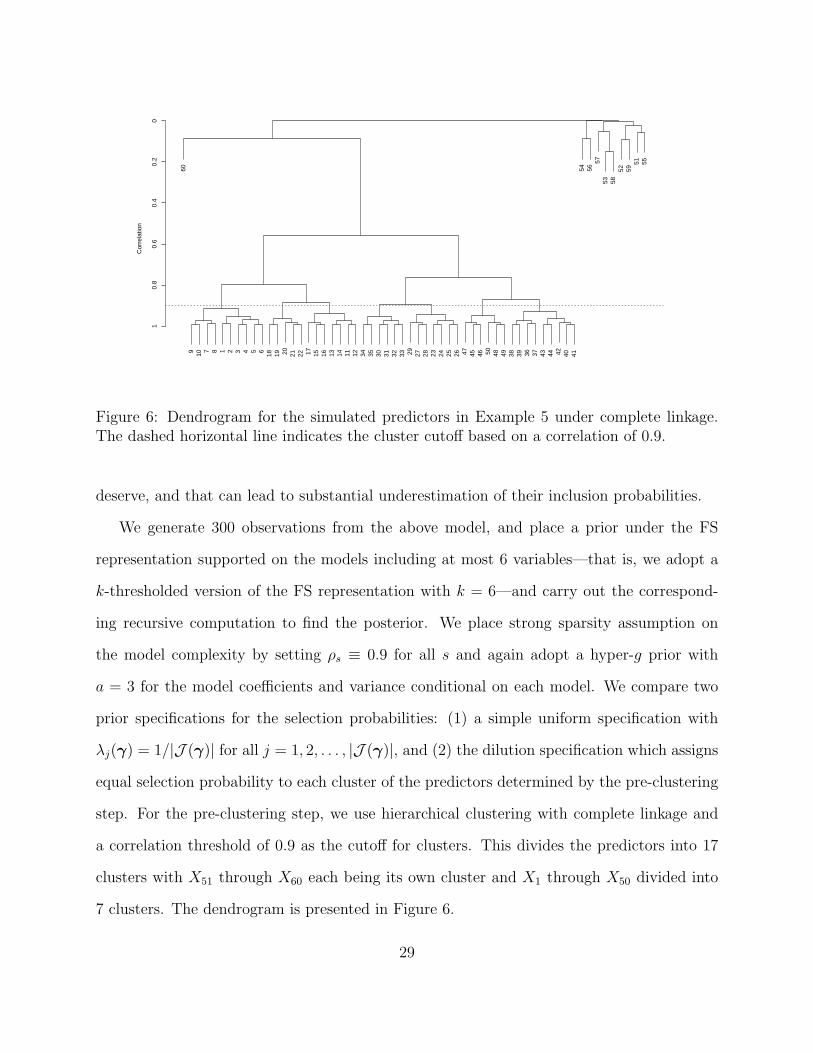
Figure 6: Dendrogram for the simulated predictors in Example 5 under complete linkage.The dashed horizontal line indicates the cluster cutoff based on a correlation of 0.9.
deserve, and that can lead to substantial underestimation of their inclusion probabilities.
We generate 300 observations from the above model, and place a prior under the FS
representation supported on the models including at most 6 variables—that is, we adopt a
k-thresholded version of the FS representation with k = 6—and carry out the correspond-
ing recursive computation to find the posterior. We place strong sparsity assumption on
the model complexity by setting ρs ≡ 0.9 for all s and again adopt a hyper-g prior with
a = 3 for the model coefficients and variance conditional on each model. We compare two
prior specifications for the selection probabilities: (1) a simple uniform specification with
λj(γ) = 1/|J (γ)| for all j = 1, 2, . . . , |J (γ)|, and (2) the dilution specification which assigns
equal selection probability to each cluster of the predictors determined by the pre-clustering
step. For the pre-clustering step, we use hierarchical clustering with complete linkage and
a correlation threshold of 0.9 as the cutoff for clusters. This divides the predictors into 17
clusters with X51 through X60 each being its own cluster and X1 through X50 divided into
7 clusters. The dendrogram is presented in Figure 6.
29
1 7 14 22 30 38 46 54
Inclusion probabilities: dilution
0.0
0.2
0.4
0.6
0.8
1.0
1 7 14 22 30 38 46 54
Inclusion probabilities: symmetric
0.0
0.2
0.4
0.6
0.8
1.0
Posterior for model size: dilution
Den
sity
0 1 2 3 4 5 6
0.0
0.2
0.4
0.6
Posterior for model size: symmetric
Den
sity
0 1 2 3 4 5 60.
00.
20.
40.
6
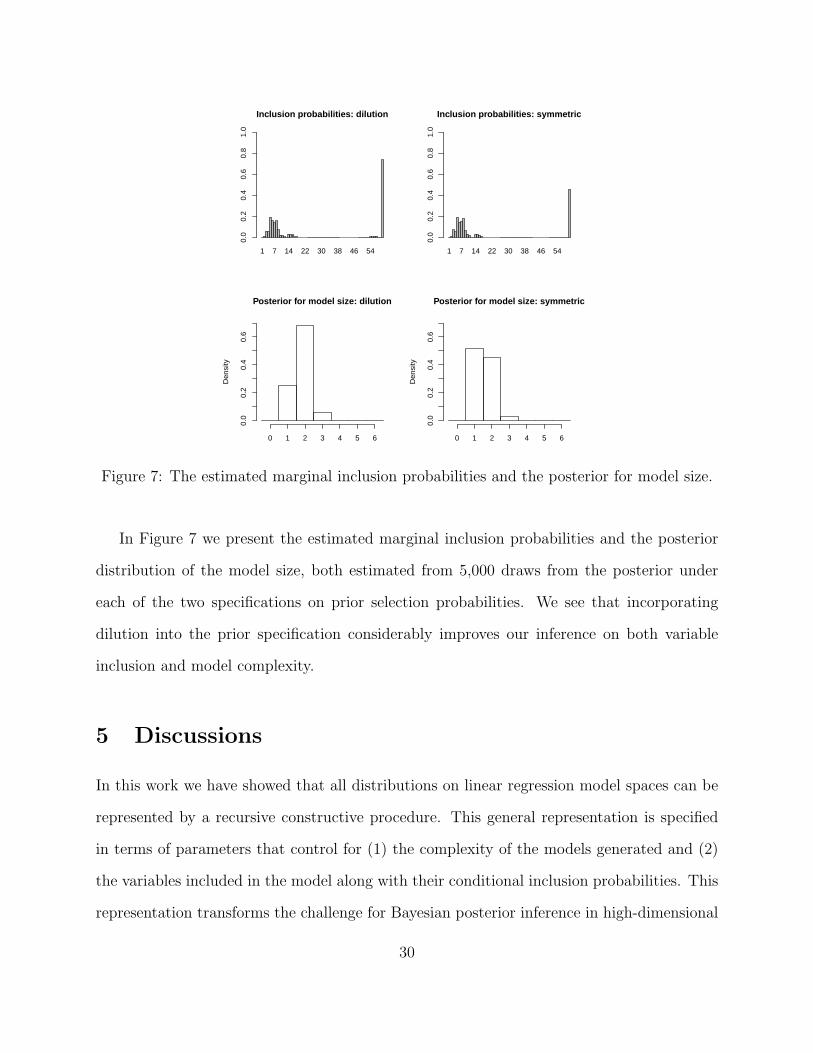
Figure 7: The estimated marginal inclusion probabilities and the posterior for model size.
In Figure 7 we present the estimated marginal inclusion probabilities and the posterior
distribution of the model size, both estimated from 5,000 draws from the posterior under
each of the two specifications on prior selection probabilities. We see that incorporating
dilution into the prior specification considerably improves our inference on both variable
inclusion and model complexity.
5 Discussions
In this work we have showed that all distributions on linear regression model spaces can be
represented by a recursive constructive procedure. This general representation is specified
in terms of parameters that control for (1) the complexity of the models generated and (2)
the variables included in the model along with their conditional inclusion probabilities. This
representation transforms the challenge for Bayesian posterior inference in high-dimensional
30
problems from integration (and sampling) into recursion, and so computational strategies
for approximating recursions can be adopted to exploring the structure of the posterior,
without resorting to sampling algorithms such as MCMC and SVS. This new approach to
posterior inference is in fact complementary to the traditional sampling-based methods. The
approximate recursion methods are effective at learning the global shape of the posterior and
thus can serve as a tool for choosing starting points for sampling methods, which are good
at exploring local features of the posterior.
We note that the construction of the FS procedure can be completely “reversed”—starting
from the full model, which includes all predictors, one can use an analogous recursive pro-
cedure to drop predictors one at a time until stopping. This gives rise to a corresponding
backward-stepwise (BS) representation. Similarly, one can introduce a “two-directional”
representation that also maintains the properties of the FS procedure. To avoid redundancy
in the presentation, we leave the details to the interested reader. The BS procedure is less
useful than the FS as the former imposes a penalty on model simplicity and often favors
more complex models. In the uncommon situation where one has reasons to believe that
the underlying model involves a majority of the potential predictors, however, the BS proce-
dure will be an appropriate choice. In problems with a large number of potential predictors
while the underlying model is expected to involve only a small number of them, the FS
representation seems to be the natural option.
An R package for the introduced method will be available in the near future.
Acknowledgment
The author is thankful to Jim Berger, Merlise Clyde, David Dunson, Fan Li, James Scott,
and Mike West for helpful discussions and comments. The author is especially grateful to
Quanli Wang for help in programming that substantially improved the software efficiency.
31
References
Berger, J. O. and L. R. Pericchi (2001). Objective Bayesian methods for model selection:
Introduction and comparison. Lecture Notes-Monograph Series 38, pp. 135–207.
Carvalho, C. M. and J. G. Scott (2009). Objective bayesian model selection in gaussian
graphical models. Biometrika 96 (3), 497–512.
Chipman, H. (1996). Bayesian variable selection with related predictors. Canadian Journal
of Statistics 24, 17–36.
Clyde, M., H. Desimone, and G. Parmigiani (1996). Prediction via orthogonalized model
mixing. Journal of the American Statistical Association 91 (435), pp. 1197–1208.
Clyde, M. and E. I. George (2000). Flexible empirical Bayes estimation for wavelets. Journal
of the Royal Statistical Society: Series B (Statistical Methodology) 62 (4), 681–698.
Clyde, M. and E. I. George (2004). Model uncertainty. STATIST. SCI 19, 81–94.
Clyde, M. A., J. Ghosh, and M. L. Littman (2011). Bayesian adaptive sampling for variable
selection and model averaging. Journal of Computational and Graphical Statistics 20 (1),
80–101.
Cui, W. and E. I. George (2008). Empirical Bayes vs. fully Bayes variable selection. Journal
of Statistical Planning and Inference 138 (4), 888–900.
Fernndez, C., E. Ley, and M. F. J. Steel (2001). Benchmark priors for Bayesian model
averaging. Journal of Econometrics 100, 381–427.
Foster, D. P. and E. I. George (1994). The risk inflation criterion for multiple regression.
The Annals of Statistics 22 (4), pp. 1947–1975.
32
George, E. I. (1999). Sampling considerations for model averaging and model search. invited
discussion of “Model averaging and model search”, by M. Clyde. In J. M. Bernado, J. O.
Berger, A. P. Dawid, and A. F. M. Smith (Eds.), Bayesian Statistics 6, pp. 175–177.
Oxford, UK: Oxford University Press.
George, E. I. (2010). Dilution priors: Compensating for model space redundancy. In Bor-
rowing Strength: Theory Powering Applications - A Festschrift for Lawrence Brown, pp.
158–165. IMS Collections.
George, E. I., I. George, and D. P. Foster (2000). Calibration and empirical Bayes variable
selection. Biometrika 87, 731–747.
George, E. I. and R. E. McCulloch (1993). Variable Selection Via Gibbs Sampling. Journal
of the American Statistical Association 88 (423), 881–889.
George, E. I. and R. E. McCulloch (1997). Approaches for Bayesian variable selection.
Statistica Sinica 7 (2), 339–373.
Geweke, J. (1996). Variable selection and model comparison in regression. In J. M. Bernado,
J. O. Berger, A. P. Dawid, and A. F. M. Smith (Eds.), Bayesian Statistics 5, pp. 339–348.
Oxford, UK: Oxford University Press.
Hans, C., A. Dobra, and M. West (2007, June). Shotgun Stochastic Search for “Large p”
Regression. Journal of the American Statistical Association 102 (478), 507–516.
Hansen, M. H. and B. Yu (2001). Model selection and the principle of minimum description
length. Journal of the American Statistical Association 96 (454), 746–774.
Hoeting, J. A., D. Madigan, A. E. Raftery, and C. T. Volinsky (1999). Bayesian model
averaging: A tutorial. Statistical Science 14 (4), pp. 382–401.
33
Jones, B., C. Carvalho, A. Dobra, C. Hans, C. Carter, and M. West (2005). Experiments in
stochastic computation for high-dimensional graphical models. Statistical Science 20 (4),
388–400.
Kass, R. E. and L. Wasserman (1995). A reference Bayesian test for nested hypotheses
and its relationship to the Schwarz criterion. Journal of the American Statistical Associ-
ation 90 (431), pp. 928–934.
Leamer, E. E. (1978a). Regression Selection Strategies and Revealed Priors. Journal of the
American Statistical Association 73 (363), 580–587.
Leamer, E. E. (1978b). Specification searches : ad hoc inference with nonexperimental data.
New York: Wiley.
Ley, E. and M. F. Steel (2009). On the effect of prior assumptions in Bayesian model
averaging with applications to growth regression. Journal of Applied Econometrics 24 (4),
651–674.
Li, F. and N. R. Zhang (2010). Bayesian variable selection in structured high-dimensional
covariate spaces with applications in genomics. JASA Theory and Methods 105, 1202–
1214.
Liang, F., R. Paulo, G. Molina, M. A. Clyde, and J. O. Berger (2008). Mixtures of g-Priors
for Bayesian Variable Selection. Journal of the American Statistical Association 103 (481),
410–423.
Mitchell, T. J. and J. J. Beauchamp (1988). Bayesian variable selection in linear regression.
Journal of the American Statistical Association 83 (404), pp. 1023–1032.
Raftery, A. E., D. Madigan, and J. A. Hoeting (1997). Bayesian model averaging for linear
regression models. Journal of the American Statistical Association 92 (437), pp. 179–191.
34
Scott, J. G. and J. O. Berger (2010). Bayes and empirical-Bayes multiplicity adjustment in
the variable-selection problem. ANNALS OF STATISTICS 38, 2587.
Smith, M. and R. Kohn (1996). Nonparametric regression using bayesian variable selection.
Journal of Econometrics 75 (2), 317 – 343.
Stewart, L. and W. W. Davis (1986). Bayesian posterior distributions over sets of possi-
ble models with inferences computed by Monte Carlo integration. Journal of the Royal
Statistical Society. Series D (The Statistician) 35 (2), pp. 175–182.
Vandaele, W. (1978). Participation in illegitimate activities—Ehrlich revisited. In A. Blum-
stein, J. Cohen, and D. Nagin (Eds.), Deterrence and Incapacitation, pp. 270–335. Wash-
ington, DC: National Academy of Sciences Press.
Wong, W. H. and L. Ma (2010). Optional Polya tree and Bayesian inference. Annals of
Statistics 38 (3), 1433–1459.
Zellner, A. (1971). An Introduction to Bayesian Inference in Econometrics. John Wiley and
Sons.
Zellner, A. (1981). Posterior odds ratios for regression hypotheses: General considerations
and some specific results. Journal of Econometrics 16 (1), 151–152.
Zellner, A. (1986). On assessing prior distributions and Bayesian regression analysis with g-
prior distributions. In in Bayesian Inference and Decision Techniques: Essays in Honour
of Bruno de Finetti, pp. 233–243. North-Holland.
Zellner, A. and A. Siow (1980). Posterior odds ratios for selected regression hypotheses.
Bayesian Statistics. Proceedings of the First Valencia International Meeting Held in Va-
lencia (Spain), 585–603.
35





























