Embed Size (px)
Citation preview
Bayesian Estimation andSegmentation of Spatial PointProcesses Using Voronoi Tilings
Rene Gaisbauer Tibor Schnurr | 18.06.2008 |Institut fur Stochastik
Seminar ”Stochastische Geometrie und ihreAnwendungen - Zufallige Netzwerke”
Seite 2 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Gliederung
MotivationZielVorteile der Bayesschen MethodeBeispiel
Idee und Grundlagen des ModellsMathematische DefinitionenIdee
Allgemeine Bayessche Formulierung
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Diskussion
Seite 3 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Gliederung
MotivationZielVorteile der Bayesschen MethodeBeispiel
Idee und Grundlagen des ModellsMathematische DefinitionenIdee
Allgemeine Bayessche Formulierung
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Diskussion
Seite 4 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Gliederung
MotivationZielVorteile der Bayesschen MethodeBeispiel
Idee und Grundlagen des ModellsMathematische DefinitionenIdee
Allgemeine Bayessche Formulierung
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Diskussion

Seite 5 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Gliederung
MotivationZielVorteile der Bayesschen MethodeBeispiel
Idee und Grundlagen des ModellsMathematische DefinitionenIdee
Allgemeine Bayessche Formulierung
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Diskussion
Seite 6 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Gliederung
MotivationZielVorteile der Bayesschen MethodeBeispiel
Idee und Grundlagen des ModellsMathematische DefinitionenIdee
Allgemeine Bayessche Formulierung
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Diskussion
Seite 7 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Motivation
ZielI Schatzung der Intensitat eines PunktprozessesI Zerlegung eines Punktprozesses/ Daten in Regionen
hoher und niedriger Intensitat
Vorteile Bayes-Methode
I mehr InformationenI a-posteriori WahrscheinlichkeitenI regionalbezogene Schatzer
Beispiele
Seite 8 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Motivation
ZielI Schatzung der Intensitat eines PunktprozessesI Zerlegung eines Punktprozesses/ Daten in Regionen
hoher und niedriger Intensitat
Vorteile Bayes-Methode
I mehr InformationenI a-posteriori WahrscheinlichkeitenI regionalbezogene Schatzer
Beispiele
Seite 9 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Motivation
ZielI Schatzung der Intensitat eines PunktprozessesI Zerlegung eines Punktprozesses/ Daten in Regionen
hoher und niedriger Intensitat
Vorteile Bayes-Methode
I mehr InformationenI a-posteriori WahrscheinlichkeitenI regionalbezogene Schatzer
Beispiele
Seite 10 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Motivation
ZielI Schatzung der Intensitat eines PunktprozessesI Zerlegung eines Punktprozesses/ Daten in Regionen
hoher und niedriger Intensitat
Vorteile Bayes-Methode
I mehr InformationenI a-posteriori WahrscheinlichkeitenI regionalbezogene Schatzer
Beispiele
Seite 11 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Motivation
ZielI Schatzung der Intensitat eines PunktprozessesI Zerlegung eines Punktprozesses/ Daten in Regionen
hoher und niedriger Intensitat
Vorteile Bayes-Methode
I mehr InformationenI a-posteriori WahrscheinlichkeitenI regionalbezogene Schatzer
Beispiele
Seite 12 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Motivation
ZielI Schatzung der Intensitat eines PunktprozessesI Zerlegung eines Punktprozesses/ Daten in Regionen
hoher und niedriger Intensitat
Vorteile Bayes-Methode
I mehr InformationenI a-posteriori WahrscheinlichkeitenI regionalbezogene Schatzer
Beispiele
Seite 13 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Motivation
ZielI Schatzung der Intensitat eines PunktprozessesI Zerlegung eines Punktprozesses/ Daten in Regionen
hoher und niedriger Intensitat
Vorteile Bayes-Methode
I mehr InformationenI a-posteriori WahrscheinlichkeitenI regionalbezogene Schatzer
Beispiele
Seite 14 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
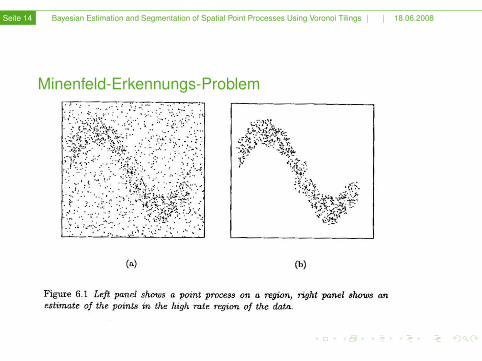
Minenfeld-Erkennungs-Problem
Seite 15 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
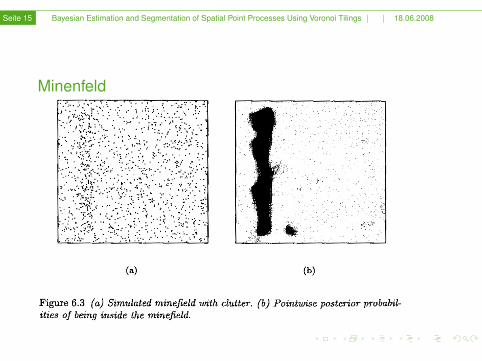
Minenfeld
Seite 16 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Gliederung
Motivation
Idee und Grundlagen des ModellsMathematische DefinitionenIdee
Allgemeine Bayessche Formulierung
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Diskussion
Seite 17 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
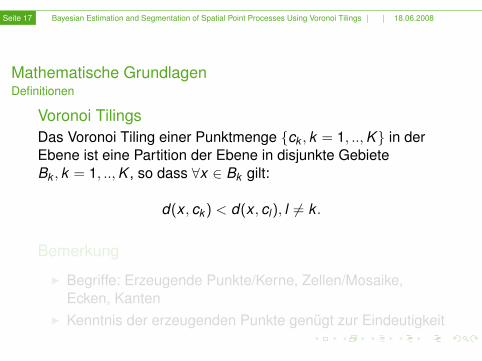
Mathematische GrundlagenDefinitionen
Voronoi TilingsDas Voronoi Tiling einer Punktmenge {ck , k = 1, ..,K} in derEbene ist eine Partition der Ebene in disjunkte GebieteBk , k = 1, ..,K , so dass ∀x ∈ Bk gilt:
d(x , ck ) < d(x , cl), l 6= k .
Bemerkung
I Begriffe: Erzeugende Punkte/Kerne, Zellen/Mosaike,Ecken, Kanten
I Kenntnis der erzeugenden Punkte genugt zur Eindeutigkeit
Seite 18 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Mathematische GrundlagenDefinitionen
Voronoi TilingsDas Voronoi Tiling einer Punktmenge {ck , k = 1, ..,K} in derEbene ist eine Partition der Ebene in disjunkte GebieteBk , k = 1, ..,K , so dass ∀x ∈ Bk gilt:
d(x , ck ) < d(x , cl), l 6= k .
Bemerkung
I Begriffe: Erzeugende Punkte/Kerne, Zellen/Mosaike,Ecken, Kanten
I Kenntnis der erzeugenden Punkte genugt zur Eindeutigkeit
Seite 19 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
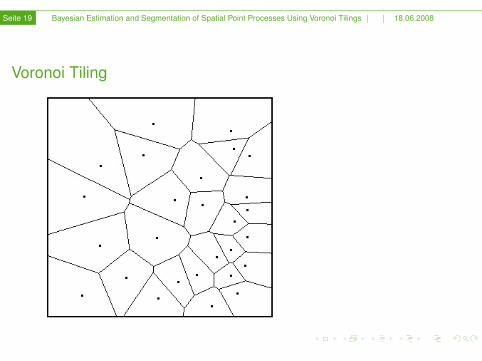
Voronoi Tiling
Seite 20 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Mathematische GrundlagenDefinitionen
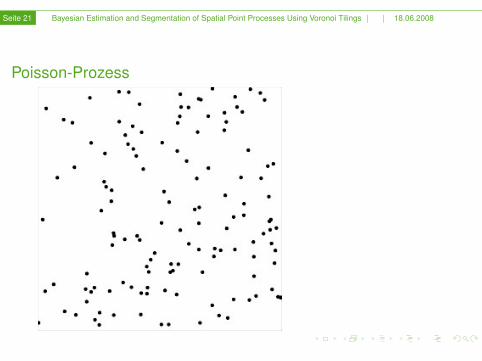
Poisson-ProzessSei µ : B(IRd)→ [0,∞] ein beliebiges lokal-endliches Maß (µ(B) <∞) ∀B ∈ B0
I Man sagt, dass{
NB ,B ∈ B(IRd)}
ein Poissonsches Zahlmaß mit demIntensitatsmaß µ ist, wenn
1. NB1 ,NB2 ,.. unabhangige Zufallsvariablen sind fur paarweise disjunkteB1,B2, .. ∈ B0(IRd) und
2. NB ∼ Poi(µ(B)) fur jedes B ∈ B0(IRd).I Gilt zusatzlich
µ(B) = λνd (B) ∀B ∈ B(IRd)
dann nennt man {NB} einen homogenen Poisson-Prozess mit der Intensitat λ.
Seite 21 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Poisson-Prozess
Seite 22 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Mathematische GrundlagenBayes-Statistik
Bayes-TheoremSeien A,B Ereignisse und P(B) > 0.Die Wahrscheinlichkeit P(A|B) ergibt sich aus
P(A|B) =P(B|A)P(A)
P(B)
wobei man
I P(A|B) als die a-posteriori WahrscheinlicheitI P(B|A) als die Likelihood-FunktionI P(A) als die a-priori Wahrscheinlichkeit undI P(B) als Normierung sehen kann.
Seite 23 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Mathematische GrundlagenBayes-Statistik
Bayes-TheoremSeien A,B Ereignisse und P(B) > 0.Die Wahrscheinlichkeit P(A|B) ergibt sich aus
P(A|B) =P(B|A)P(A)
P(B)
wobei man
I P(A|B) als die a-posteriori WahrscheinlicheitI P(B|A) als die Likelihood-FunktionI P(A) als die a-priori Wahrscheinlichkeit undI P(B) als Normierung sehen kann.
Seite 24 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Idee: Voronoi Tiling Modell
Anpassung des Voronoi Tilings an die Datenpunkte y
Annahme: Approximation eines Punktprozesses durch einenPoisson-Punktprozess mit stuckweise konstanter Intensitat

Seite 25 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Gliederung
Motivation
Idee und Grundlagen des Modells
Allgemeine Bayessche Formulierung
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Diskussion
Seite 26 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Allgemeine Formulierung des Voronoi Tiling Modells
Likelihood-Funktion ∝∏K
k=1 λnkk exp {−λkak}
A-priori Verteilungen K ∼ Poi (ν){λk ; k = 1, ..,K} |K iid ∼ Gamma (a,b){ck ; k = 1, ..,K} |K iid ∼ U {S}
wobeiI ak die Flache der k -ten Zelle oder der Menge/Region Bk
I nk die Anzahl der Punkte auf der k -ten ZelleI S betrachtete Region
Seite 27 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Allgemeine Formulierung des Voronoi Tiling Modells
Bemerkungen
I Anzahl der Zellen K in dieser Formulierung eigentlich nichtfest
I Annahme: K fest.
I Moglichkeit fur hohere Flexibilitat bei der Partitionierungder Region duch Voronoi Tilings
I Hyperpriori fur Parameter ν
Seite 28 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Allgemeine Formulierung des Voronoi Tiling Modells
Bemerkungen
I Anzahl der Zellen K in dieser Formulierung eigentlich nichtfest
I Annahme: K fest.
I Moglichkeit fur hohere Flexibilitat bei der Partitionierungder Region duch Voronoi Tilings
I Hyperpriori fur Parameter ν
Seite 29 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Erstes Ergebnis dieser FormulierungA-posteriori Verteilung
π (K , {λk ,ck ; k = 1, ..,K} |y) ∝ νK
K !
K∏k=1
λnk +a−1k exp {−λk (ak + b)}
Seite 30 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Erstes Ergebnis dieser FormulierungA-posteriori Verteilung
π (K , {λk ,ck ; k = 1, ..,K} |y) ∝ νK
K !
K∏k=1
λnk +a−1k exp {−λk (ak + b)}
Seite 31 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Moglichkeit zur ImplementierungMarkov chain Monte Carlo
I Hier: Anpassung des Modells durch MCMC-Simulationender a-posteriori Verteilung mit gegebenen Daten
I Algorithmus Metropolis-Hastings-TypI Kenntnis uber eine zu der a-posteriori Verteilung
proportionale Funktion genugtI Akzeptanz-/Verwerfungssalgorithmus
Seite 32 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Moglichkeit zur ImplementierungMarkov chain Monte Carlo
I Hier: Anpassung des Modells durch MCMC-Simulationender a-posteriori Verteilung mit gegebenen Daten
I Algorithmus Metropolis-Hastings-TypI Kenntnis uber eine zu der a-posteriori Verteilung
proportionale Funktion genugtI Akzeptanz-/Verwerfungssalgorithmus
Seite 33 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Moglichkeit zur ImplementierungMarkov chain Monte Carlo
I Hier: Anpassung des Modells durch MCMC-Simulationender a-posteriori Verteilung mit gegebenen Daten
I Algorithmus Metropolis-Hastings-TypI Kenntnis uber eine zu der a-posteriori Verteilung
proportionale Funktion genugtI Akzeptanz-/Verwerfungssalgorithmus
Seite 34 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Moglichkeit zur ImplementierungMarkov chain Monte Carlo
I Hier: Anpassung des Modells durch MCMC-Simulationender a-posteriori Verteilung mit gegebenen Daten
I Algorithmus Metropolis-Hastings-TypI Kenntnis uber eine zu der a-posteriori Verteilung
proportionale Funktion genugtI Akzeptanz-/Verwerfungssalgorithmus
Seite 35 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Moglichkeit zur ImplementierungMarkov chain Monte Carlo mit dynamischen Voronoi Tilings
I A-posteriori VerteilungI der Anzahl der Zellen,I der Positionen der Kerne undI der Intensitaten von jeder Zelle
liefertI einen Schatzer der Intensitat undI die Streuung des Schatzers
als eine Funktion des Raumes (hier der Flache).I Aufteilung des Verfahrens in zwei Falle
I Feste Anzahl der ZellenI Variable Anzahl der Zellen
Seite 36 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Moglichkeit zur ImplementierungMarkov chain Monte Carlo mit dynamischen Voronoi Tilings
I A-posteriori VerteilungI der Anzahl der Zellen,I der Positionen der Kerne undI der Intensitaten von jeder Zelle
liefertI einen Schatzer der Intensitat undI die Streuung des Schatzers
als eine Funktion des Raumes (hier der Flache).I Aufteilung des Verfahrens in zwei Falle
I Feste Anzahl der ZellenI Variable Anzahl der Zellen
Seite 37 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Moglichkeit zur ImplementierungMarkov chain Monte Carlo mit dynamischen Voronoi Tilings
I A-posteriori VerteilungI der Anzahl der Zellen,I der Positionen der Kerne undI der Intensitaten von jeder Zelle
liefertI einen Schatzer der Intensitat undI die Streuung des Schatzers
als eine Funktion des Raumes (hier der Flache).I Aufteilung des Verfahrens in zwei Falle
I Feste Anzahl der ZellenI Variable Anzahl der Zellen
Seite 38 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Moglichkeit zur ImplementierungFeste Anzahl der Zellen
I Bedingte Verteilung der Parameter
π (λk |...) ∼ Gamma(nk + a,ak + b), k = 1, ..,K
π (ck |...) ∝∏K
k=1 λnk +a−1k exp
{−∑K
k=1 λk (ak + b)}, k = 1, ..,K .
I Notation: |... bezeichne die Bedingtheit aller anderenParameter und der Daten.
Seite 39 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Moglichkeit zur ImplementierungFeste Anzahl der Zellen - Das Verfahren
Vorgehensweise1. Vorschlag Punkte zu bewegen2. Neuberechnung Voronoi Tiling3. Aktzeptanz-Wahrscheinlichkeit fur das neue Voronoi Tiling
gegenuber dem Alten4. Verandere die Punkte dementsprechend5. Wiederhole Schritte 1 bis 4
Seite 40 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
ImplementierungenFeste Anzahl der Zellen - Das Verfahren
Drei Schemas:1. Vorschlag einen erzeugenden Punkt eine kleine Distanz zu
bewegen2. Vorschlag einen erzeugenden Punkt irgendwohin in der
Region zu bewegenI Dies entspricht dem Loschen eines Kerns und
gleichzeitigem Hinzufugen eines Kerns. Auch bei denIntensitaten konnte Anderung vorgeschlagen werden.
3. Vorschlag alle erzeugenden Punkte eine kleine Distanz zubewegen
I Aufdecken von Details bei Unstetigkeiten in der Intensitat
Seite 41 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
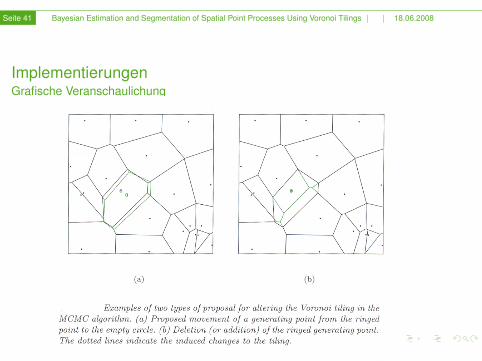
ImplementierungenGrafische Veranschaulichung
Seite 42 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Implementierungvariable Anzahl der Zellen
I Es ist wunschenswert eine flexible Anzahl an Zellenzuzulassen, um die Anpassungsfahigkeit des Tilings andas Muster der Daten-Punkte zu verbessern
I Ist bspw. die Anzahl der Zellen zu gering, fehlt u.U. dieMoglichkeit Details zu erfassen
I Hierfur muss die herkommliche Markov Chain Monte CarloMethode mit reversible jump MCMC erweitert werden
I Zusatzlich zu Verschiebungen der Punkte kommt jetztnoch das Zufugen und das Entfernen eines Punktes hinzu
I Zufugen und Entfernen verursacht nur lokale Effekte beimTiling
I Kleine Verschiebungen konnen das Tiling auch verandern
Seite 43 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Gliederung
Motivation
Idee und Grundlagen des Modells
Allgemeine Bayessche Formulierung
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Diskussion
Seite 44 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
ZielAuf zwei Intensitaten basierende Zerlegung desPunktprozesses in zwei disjunkte, nicht unbedingtzusammenhangende Gebiete, so dass der Prozess stuckweisekonstante Intensitaten besitzt.
Seite 45 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
ModellI Zu betrachtende Region SI Gebiet A0, in das N0 Datenpunkte fallenI Gebiet A1, in das N1 Datenpunkte fallenI A0 hat Intensitat µ0
I A1 hat Intensitat µ0 + µ1
I Klassifikation hoch/niedrig der Zellen in Variablendk ,k = 1, . . . ,K angegeben; dk = 1 hoch und dk = 0niedrig
I Menge {ck ; k = 1, . . . ,K} sind Positionen der erzeugendenPunkte
Seite 46 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Modell
Likelihood ∝ µN00 (µ0 + µ1)N1 exp {−µ0A0 − (µ0 + µ1)A1}
A-priori Verteilungen
I µ0, µ1 ∼ Gamma(a,b)
I K ∼ Poisson(ν)
I {dk ; k = 1, . . . ,K} |K ∼ Bernoulli(p)
I {ck ; k = 1, . . . ,K} |K ∼ U {S}
Seite 47 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Modell
Likelihood ∝ µN00 (µ0 + µ1)N1 exp {−µ0A0 − (µ0 + µ1)A1}
A-priori Verteilungen
I µ0, µ1 ∼ Gamma(a,b)
I K ∼ Poisson(ν)
I {dk ; k = 1, . . . ,K} |K ∼ Bernoulli(p)
I {ck ; k = 1, . . . ,K} |K ∼ U {S}
Seite 48 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
MCMC Algorithmus
I Aktualisiere die zwei Intensitaten des ProzessesI Andere die Klassifikation einer Zelle von hoch zu niedrig
oder von niedrig zu hochI Verschiebe einen oder mehrere erzeugende Punkte
Seite 49 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
MCMC Algorithmus
I Aktualisiere die zwei Intensitaten des ProzessesI Andere die Klassifikation einer Zelle von hoch zu niedrig
oder von niedrig zu hochI Verschiebe einen oder mehrere erzeugende Punkte
Seite 50 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
MCMC Algorithmus
I Aktualisiere die zwei Intensitaten des ProzessesI Andere die Klassifikation einer Zelle von hoch zu niedrig
oder von niedrig zu hochI Verschiebe einen oder mehrere erzeugende Punkte
Seite 51 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
Zur einfacheren Notation sei:
ξ = exp {−µ0(A0 + A1 + b)− µ1(A1 + b)}
a-posteriori Verteilung
π(µ0, µ1, {dk , ck ; k = 1, . . . ,K} |y) ∝
µN0+a−10 µa−1
1 (µ0 + µ1)N1∏K
k=1 pdk (1− p)1−dk × ξ
Seite 52 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
bedingte Verteilungen der Parameter
I π(µ0, µ1| · · · ) ∝ µN0+a−10 µa−1
1 (µ0 + µ1)N1 × ξ
I π(dk | · · · ) ∝ pdk (1− p)1−dkµN0+a−10 µa−1
1 (µ0 + µ1)N1 × ξ
I π(ck | · · · ) ∝ µN0+a−10 µa−1
1 (µ0 + µ1)N1 × ξ
Seite 53 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
MCMC Algorithmus
I Schritte im MCMC-Algorithmus ahnlich zu denen bei dervorherigen allgemeinen Formulierung
Seite 54 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
AkzeptanzwahrscheinlichkeitAkzeptanzwahrscheinlichkeit α gegeben durch
α = min {1,R} .
Seite 55 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
I R(µ0, µ1; µ0, µ1) =(µ0µ1µ0µ1
)a−1 (µ0µ0
)N0(µ0+µ1µ0+µ1
)N1×
exp {−A0(µ0 − µ0)− (b + A1)(µ0 + µ1 − µ0 − µ1)}
I R(dk ; dk ) =(
µ0µ0+µ1
)−nkexp(−µ1ak )
wobeiI nk die Anzahl der Punkte in Zelle k
I ak die Flache der Zelle k
Seite 56 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
I R(µ0, µ1; µ0, µ1) =(µ0µ1µ0µ1
)a−1 (µ0µ0
)N0(µ0+µ1µ0+µ1
)N1×
exp {−A0(µ0 − µ0)− (b + A1)(µ0 + µ1 − µ0 − µ1)}
I R(dk ; dk ) =(
µ0µ0+µ1
)−nkexp(−µ1ak )
wobeiI nk die Anzahl der Punkte in Zelle k
I ak die Flache der Zelle k
Seite 57 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatFeste Anzahl an Zellen
I R(ck ; ck ) =(µ0µ1µ0µ1
)a−1µ0
N0 (µ1+µ0)N1
µN00 (µ1+µ0)N1
×
exp{−A0µ0 + A0µ0 − (b + A1)(µ1 + µ0) + (b + A1)(µ1 + µ0)
}
Seite 58 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Zerlegung in zwei Bereiche unterschiedlicher IntensitatVariable Anzahl an Zellen
I Wie in der allgemeinen Formulierung ist es wunschenswerteine variable Anzahl an Zellen zuzulassen
I Erweiterung ist ahnlich wie zuvor (↪→ reversible jumpMCMC)
I Position eines neu erzeugten Punkt ist gleichverteilt auf SI Neue Zelle muss entweder der hohen oder der niedrigen
Intensitat zugeteilt werdenI Am einfachsten wird die neue Zelle zufallig uber die
a-Priori Verteilung einer Intensitat zugewiesen
Seite 59 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
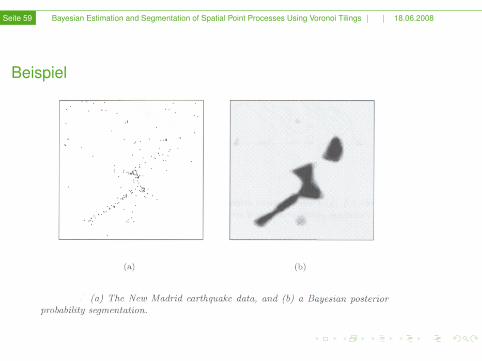
Beispiel
Seite 60 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Gliederung
Motivation
Idee und Grundlagen des Modells
Allgemeine Bayessche Formulierung
Zerlegung in zwei Bereiche unterschiedlicher Intensitat
Diskussion
Seite 61 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Diskussion
I Methoden zur Segmentierung und Schatzung derIntensitat eines PunktprozessesAnnahme: stuckweise konstante Intensitat (lokaleHomogenitat)
I Vorteil gegenuber Kern-Dichte-Schatzung oder anderennichtparametrischen Dichte-Schatzungs-Methoden
I explizites Modell zur SegmentierungI Wkt.aussagen uber Unsicherheit bzgl. der IntensitatI Einfache Erweiterung auf markierte Punktprozesse
Seite 62 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Quellen
I A. Lawson, D. Denison (2002). Spatial Cluster Modelling,Chapman & Hall/CRC
I P.J. Green (1995). Reversible Jump Markov Chain MonteCarlo computation and Bayesian model determination,Biometrika 82
I V.Schmidt (2008). Skript Raumliche Statistik
Seite 63 Bayesian Estimation and Segmentation of Spatial Point Processes Using Voronoi Tilings | | 18.06.2008
Bilder
I A. Lawson, D. Denison (2002). Spatial Cluster Modelling,Chapman & Hall/CRC
I S.D. Byers, A.E. Raftery (1998). Nearest neighbor clutterremoval for estimating features in spatial point processes,J. Amer. Statist. Assoc. 93
I A. Dasgupta, A.E. Raftery (1998). Detecting features inspatial point processes with clutter via model-basedclustering, J. Amer. Statist. Assoc. 93







![Robust Statistical Estimation and Segmentation of …cs294-6/fa06/papers/RANSAC25-Yang-A… · Robust Statistical Estimation and Segmentation of Multiple Subspaces ... [5,16,34]](https://img.pdfslide.us/doc/110x75/5ad8473b7f8b9a991b8d1c81/robust-statistical-estimation-and-segmentation-of-cs294-6fa06papersransac25-yang-arobust.jpg)




















