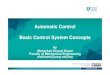
Basic Control System ConceptsTo understand how PID controllers
are used, it is important to first understandsome basic control
system principles. The image below illustrates the 2 basic types of
control system.
The open loop systemcan clearly be seen to have no feedback,
therefore if the load changes on the motor, the motor speed will
change. The control unit cannot command the driver to increase or
decrease the power to the motor, as it has no knowledge of the
speed change induced in the motor, by the change in load.The closed
loop systemhowever has feedback from the motor. So if the motors
speed were to decrease due to an increase in load, the control unit
could command the driver to increase the power to the motor,
keeping a constant speed. Common direct current motor control is
achieved via PWM, and simply increasing or decreasing the duty
cycle will increase or decrease the motor speed.Before I introduce
you about various controllers in detail, it is very essential to
know the uses of controllers in the theory of control systems. The
important uses of the controllers are written below:
Controllers improve steady state accuracy by decreasing the
steady state errors.1. As the steady state accuracy improves, the
stability also improves.2. They also help in reducing the offsets
produced in the system.3. Maximum overshoot of the system can be
controlled using these controllers.4. They also help in reducing
the noise signals produced in the system.5. Slow response of the
over damped system can be made faster with the help of these
controllers.Now what are controllers? A controller is one which
compares controlled values with the desired values and has a
function to correct the deviation produced.Types of ControllersLet
us classify the controllers. There are mainly twotypes of
controllersand they are written below:Continuous Controllers:The
main feature of continuous controllers is that the controlled
variable (also known as the manipulated variable) can have any
value within the range of controllers output. Now in the continuous
controllers theory, there are three basic modes on which the whole
control action takes place and these modes are written below. We
will use the combination of these modes in order to have a desired
and accurate output.1. Proportional controllers.2. Integral
controllers.3. Derivative controllers.Combinations of these three
controllers are written below:4. Proportional and integral
controllers.5. Proportional and derivative controllers.Now we will
discuss each of these modes in detail.Proportional ControllersWe
cannot usetypes of controllersat anywhere, with each type
controller, there are certain conditions that must be fulfilled.
Withproportional controllersthere are two conditions and these are
written below:1. Deviation should not be large, it means there
should be less deviation between the input and output.2. Deviation
should not be sudden.Now we are in a condition to discuss
proportional controllers, as the name suggests in a proportional
controller the output (also called the actuating signal) is
directly proportional to the error signal. Now let us analyze
proportional controller mathematically. As we know in proportional
controller output is directly proportional to error signal, writing
this mathematically we have,
Removing the sign of proportionality we have,
Where Kpis proportional constant also known as controller
gain.It is recommended that Kpshould be kept greater than unity. If
the value of Kpis greater than unity, then it will amplify the
error signal and thus the amplified error signal can be detected
easily.Advantages of Proportional ControllerNow let us discuss some
advantages of proportional controller.1. Proportional controller
helps in reducing the steady state error, thus makes the system
more stable.2. Slow response of the over damped system can be made
faster with the help of these controllers.Disadvantages of
Proportional ControllerNow there are some serious disadvantages of
these controllers and these are written as follows:1. Due to
presence of these controllers we some offsets in the system.2.
Proportional controllers also increase the maximum overshoot of the
system.
Integral ControllersAs the name suggests inintegral
controllersthe output (also called the actuating signal) is
directly proportional to the integral of the error signal. Now let
us analyze integral controller mathematically. As we know in an
integral controller output is directly proportional to the
integration of the error signal, writing this mathematically we
have,
Removing the sign of proportionality we have,
Where Kiis integral constant also known as controller gain.
Integral controller is also known as reset controller.
Advantages of Integral ControllerDue to their unique ability
they can return the controlled variable back to the exact set point
following a disturbance thats why these are known as reset
controllers.Disadvantages of Integral ControllerIt tends to make
the system unstable because it responds slowly towards the produced
error.Derivative ControllersWe never usederivative
controllersalone. It should be used in combinations with other
modes of controllers because of its few disadvantages which are
written below:1. It never improves the steady state error.2. It
produces saturation effects and also amplifies the noise signals
produced in the system.Now, as the name suggests in a derivative
controller the output (also called the actuating signal) is
directly proportional to the derivative of the error signal. Now
let us analyze derivative controller mathematically. As we know in
a derivative controller output is directly proportional to the
derivative of the error signal, writing this mathematically we
have,
Removing the sign of proportionality we have,
Where Kdis proportional constant also known as controller gain.
Derivative controller is also known as rate controller.
Advantages of Derivative ControllerThe major advantage of
derivative controller is that it improves the transient response of
the system.Proportional and Integral ControllerAs the name suggests
it is a combination of proportional and an integral controller the
output (also called the actuating signal) is equal to the summation
of proportional and integral of the error signal. Now let us
analyze proportional and integral controller mathematically. As we
know in a proportional and integral controller output is directly
proportional to the summation of proportional of error and
integration of the error signal, writing this mathematically we
have,
Removing the sign of proportionality we have,
Where Kiand kpproportional constant and integral constant
respectively.
Advantages and disadvantages are the combinations of the
advantages and disadvantages of proportional and integral
controllers.Proportional and Derivative ControllerAs the name
suggests it is a combination of proportional and a derivative
controller the output (also called the actuating signal) is equals
to the summation of proportional and derivative of the error
signal. Now let us analyze proportional and derivative controller
mathematically. As we know in a proportional and derivative
controller output is directly proportional to summation of
proportional of error and differentiation of the error signal,
writing this mathematically we have,
Removing the sign of proportionality we have,
Where Kdand kpproportional constant and derivative constant
respectively.
Advantages and disadvantages are the combinations of advantages
and disadvantages of proportional and derivative controllers
Sometimes, the control element has only two position either it
is fully closed or fully open. This control element does not
operate at any intermediate position, i.e. partly open or partly
closed position. The control system made for controlling such
elements, is known ason off control theory. In this control system,
when process variable changes and crosses certain preset level, the
output valve of the system is suddenly fully opened and gives 100%
output.
Generally in on off control system, the output causes change in
process variable. Hence due to effect of output, the process
variable again starts changing but in reverse direction. During
this change, when process variable crosses certain predetermined
level, the output valve of the system is immediately closed and
output is suddenly reduced to 0%.As there is no output, the process
variable again starts changing in its normal direction. When it
crosses the preset level, the output valve of the system is again
fully open to give 100% output. This cycle of closing and opening
of output valve continues till the said on-off control system is in
operation.A very common example ofon-off control theoryis fan
controlling scheme of transformer cooling system.When transformer
runs with such a load, the temperature of theelectrical power
transformerrises beyond the preset value at which the cooling fans
start rotating with their full capacity.As the cooling fans run,
the forced air (output of the cooling system) decreases the
temperature of the transformer.When the temperature (process
variable) comes down below a preset value, the control switch of
fans trip and fans stop supplying forced air to the transformer.
After that, as there is no cooling effect of fans, the temperature
of the transformer again starts rising due to load.Again when
during rising, the temperature crosses the preset value, the fans
again start rotating to cool down the transformer.Theoretically, we
assume that there is no lag in the control equipment. That means,
there is no time day for on and off operation of control equipment.
With this assumption if we draw series of operations of an ideal on
off control system, we will get the graph given below.
But in practical on off control, there is always a non zero time
delay for closing and opening action ofcontrollerelements.This time
delay is known as dead time. Because of this time delay the actual
response curve differs from the above shown ideal response
curve.Let us try to draw actual response curve of an on off control
system.
Say at time TOthe temperature of the transformer starts rising.
The measuring instrument of the temperature does not response
instantly, as it requires some time delay for heating up and
expansion of mercury in temperature sensor bulb say from instant
T1the pointer of the temperature indicator starts rising. This
rising is exponential in nature. Let us at point A,
thecontrollersystem starts actuating for switching on cooling fans
and finally after period of T2the fans starts delivering force air
with its full capacity. Then the temperature of the transformer
starts decreasing in exponential manner.
Definition of Control SystemAs the human civilization is being
modernized day by day the demand of automation is increasing
accordingly. Automation highly requires control of devices.
Acontrol systemis a system of devices or set of devices, that
manages, commands, directs or regulates the behavior of other
device(s) or system(s) to achieve desire results. In other words
thedefinition of control systemcan be rewritten asA control system
is a system, which controls other system.In recent years,control
systemsplays main role in the development and advancement of modern
technology and civilization. Practically every aspects of our
day-to-day life is affected less or more by some control system. A
bathroom toilet tank, a refrigerator, an air conditioner, a geezer,
an automatic iron, an automobile all are control system. These
systems are also used in industrial process for more output. We
find control system in quality control of products, weapons system,
transportation systems, power system, space technology, robotics
and many more. Theprinciples of control theoryis applicable to
engineering and non engineering field both.Requirement Of Good
Control SystemAccuracy:Accuracy is the measurement tolerance of the
instrument and defines the limits of the errors made when the
instrument is used in normal operating conditions. Accuracy can be
improved by using feedback elements. To increase accuracy of any
control system error detector should be present in control
system.Sensitivity:The parameters of control system are always
changing with change in surrounding conditions, internal
disturbance or any other parameters. This change can be expressed
in terms of sensitivity. Any control system should be insensitive
to such parameters but sensitive to input signals only.Noise:An
undesired input signal is known as noise. A good control system
should be able to reduce the noise effect for better
performance.Stability:It is an important characteristic of control
system. For the bounded input signal, the output must be bounded
and if input is zero then output must be zero then such a control
system is said to be stable system.
Bandwidth:An operating frequency range decides the bandwidth of
control system. Bandwidth should be large as possible for frequency
response of good control system.Speed:It is the time taken by
control system to achieve its stable output. A good control system
possesses high speed. The transient period for such system is very
small.Oscillation:A small numbers of oscillation or constant
oscillation of output tend to system to be stable.Types Of Control
SystemsThere are two maintypes of control system. They are as
follow1. Open loop control system2. Closed loop control systemOpen
Loop Control SystemA control system in which the control action is
totally independent of output of the system then it is calledopen
loop control system. Open loop system is also called as Manual
control system. Fig 1 shows the block diagram of open loop control
system in which process output is totally independent of controller
action.
Practical Examples Of Open Loop Control System1. Electric Hand
Drier Hot air (output) comes out as long as you keep your hand
under the machine, irrespective of how much your hand is dried.2.
Automatic Washing Machine This machine runs according to the
pre-set time irrespective of washing is completed or not.3. Bread
Toaster This machine runs as per adjusted time irrespective of
toasting is completed or not.4. Automatic Tea/Coffee Maker These
machines also function for pre adjusted time only.5. Timer Based
Clothes Drier This machine dries wet clothes for pre adjusted time,
it does not matter how much the clothes are dried.6. Light Switch
lamps glow whenever light switch is on irrespective of light is
required or not.7. Volume on Stereo System Volume is adjusted
manually irrespective of output volume level.Advantages Of Open
Loop Control System1. Simple in construction and design.2.
Economical.3. Easy to maintain.4. Generally stable.5. Convenient to
use as output is difficult to measure.Disadvantages Of Open Loop
Control System1. They are inaccurate.2. They are unreliable.3. Any
change in output cannot be corrected automatically.Closed Loop
Control SystemControl system in which the output has an effect on
the input quantity in such a manner that the input quantity will
adjust itself based on the output generated is calledclosed loop
control system. Open loop control system can be converted in to
closed loop control system by providing a feedback. This feedback
automatically makes the suitable changes in the output due to
external disturbance. In this way closed loop control system is
called automatic control system. Figure below shows the block
diagram of closed loop control system in which feedback is taken
from output and fed in to input.
Practical Examples Of Closed Loop Control System1. Automatic
Electric Iron Heating elements are controlled by output temperature
of the iron.2. Servo Voltage Stabilizer Voltage controller operates
depending upon outputvoltageof the system.3. Water Level Controller
Input water is controlled by water level of the reservoir.4.
Missile Launched & Auto Tracked by Radar The direction of
missile is controlled by comparing the target and position of the
missile.5. An Air Conditioner An air conditioner functions
depending upon the temperature of the room.6. Cooling System in Car
It operates depending upon the temperature which it
controls.Advantages OF Closed Loop Control System1. Closed loop
control systems are more accurate even in the presence of
non-linearity.2. Highly accurate as any error arising is corrected
due to presence of feedback signal.3. Bandwidth range is large.4.
Facilitates automation.5. The sensitivity of system may be made
small to make system more stable.6. This system is less affected by
noise.Disadvantages Of Closed Loop Control System1. They are
costlier.2. They are complicated to design.3. Required more
maintenance.4. Feedback leads to oscillatory response.5. Overall
gain is reduced due to presence of feedback.6. Stability is the
major problem and more care is needed to design a stable closed
loop system.Comparison of Closed Loop And Open Loop Control
SystemSR. NO.OPEN LOOP CONTROL SYSTEMCLOSED LOOP CONTROL SYSTEM
1The feedback element is absent.The feedback element is always
present.
2An error detector is not present.An error detector is always
present.
3It is stable one.It may become unstable.
4Easy to construct.Complicated construction.
5It is an economical.It is costly.
6Having small bandwidth.Having large bandwidth.
7It is inaccurate.It is accurate.
8Less maintenance.More maintenance.
9It is unreliable.It is reliable.
10Examples: Hand drier, tea makerExamples:
Servovoltagestabilizer, perspiration
Feedback Loop Of Control SystemA feedback is a common and
powerful tool when designing a control system. Feedback loop is the
tool which take the system output into consideration and enables
the system to adjust its performance to meet a desired result of
system.In any control system, output is affected due to change in
environmental condition or any kind of disturbance. So one signal
is taken from output and is fed back to the input. This signal is
compared with reference input and then error signal is generated.
This error signal is applied to controller and output is corrected.
Such a system is called feedback system. Figure below shows the
block diagram of feedback system.
When feedback signal is positive then system called positive
feedback system. For positive feedback system, the error signal is
the addition of reference input signal and feedback signal. When
feedback signal is negative then system is called negative feedback
system. For negative feedback system, the error signal is given by
difference of reference input signal and feedback signal.Effect Of
FeedbackRefer figure beside, which represents feedback system
whereR = Input signalE = Error signalG = forward path gainH =
FeedbackC = Output signalB = Feedback signal
1. Error between system input and system output is reduced.2.
System gain is reduced by a factor 1/(1GH).3. Improvement in
sensitivity.4. Stability may be affected.5. Improve the speed of
response
At point B, the controller system starts actuating for switching
off the cooling fans and finally after a period of T3the fans stop
delivering force air. Then the temperature of the transformer again
starts rising in same exponential manner.N.B.: Here during this
operation we have assumed that, loading condition of theelectrical
powertransformer, ambient temperature and all other conditions of
surrounding are fixed and constant.Linear Control SystemsIn order
to understand thelinear control system, we should know the
principle of superposition. The principle ofsuperposition
theoremincludes two the important properties and they are explained
below:Homogeneity:A system is said to be homogeneous, if we
multiply input with some constant A then output will also be
multiplied by the same value of constant (i.e.
A).Additivity:Suppose we have a system S and we are giving the
input to this system as a1 for the first time and we are getting
output as b1 corresponding to input a1. On second time we are
giving input a2 and correspond to this we are getting output as b2.
Now suppose this time we giving input as summation of the previous
inputs ( i.e. a1+ a2) and corresponding to this input suppose we
are getting output as (b1+ b2) then we can say that system S is
following the property of additivity. Now we are able to define
thelinear control systemsas thosetypes of control systemswhich
follow the principle of homogeneity and additivity.Examples of
Linear Control SystemConsider a purely resistive network with a
constant dc source. This circuit follows the principle of
homogeneity and additivity. All the undesired effects are neglected
and assuming ideal behavior of each element in the network, we say
that we will get linearvoltageand current characteristic. This is
the example oflinear control system.Non-linear SystemsWe can simply
definenon linear control systemas all those system which do not
follow the principle of homogeneity. In practical life all the
systems are non-linear system.Examples of Non-linear SystemA well
known example of non-linear system is magnetization curve orno load
curve of a dc machine. We will discuss briefly no load curve of dc
machines here: No load curve gives us the relationship between the
air gap flux and the field winding mmf. It is very clear from the
curve given below that in the beginning there is a linear
relationship between winding mmf and the air gap flux but after
this, saturation has come which shows the non linear behavior of
the curve or characteristics of thenon linear control system.
Analog or Continuous SystemIn thesetypes of control systemwe
have continuous signal as the input to the system. These signals
are the continuous function of time. We may have various sources of
continuous input signal like sinusoidal type signal input source,
square type of signal input source, signal may be in the form of
continuous triangle etc.Digital or Discrete SystemIn these types of
control system we have discrete signal (or signal may be in the
form of pulse) as the input to the system. These signals have the
discrete interval of time. We can convert various sources of
continuous input signal like sinusoidal type signal input source,
square type of signal input source etc into discrete form using the
switch.Now there are various advantages of discrete or digital
system over the analog system and these advantages are written
below:1. Digital systems can handle non linear control systems more
effectively than the analog type of systems.2. Power requirement in
case of discrete or digital system is less as compared to analog
systems.3. Digital system has higher rate of accuracy and can
perform various complex computations easily as compared to analog
systems.4. Reliability of digital system is more as compared to
analog system. They also have small and compact size.5. Digital
system works on the logical operations which increases their
accuracy many times.6. Losses in case of discrete systems are less
as compared to analog systems in general.Single Input Single Output
SystemsThese are also known as SISO type of system. In this the
system has single input for single output. Various example of this
kind of system may include temperature control, position control
system etc.Multiple Input Multiple Output SystemsThese are also
known as MIMO type of system. In this the system has multiple
outputs for multiple inputs. Various example of this kind of system
may include PLC type system etc.Lumped Parameter SystemIn these
types of control systems the various active (resistor) and passive
parameters (likeinductorand capacitor) are assumed to be
concentrated at a point and thats why these are called lumped
parameter type of system. Analysis of such type of system is very
easy which includes differential equations.Distributed Parameter
SystemIn thesetypes of control systemsthe various active (resistor)
and passive parameters (likeinductorand capacitor) are assumed to
be distributed uniformly along the length and thats why these are
called distributed parameter type of system. Analysis of such type
of system is slightly difficult which includes partial differential
equations.Mathematical Modelling of Control SystemThere are various
types of physical systems namely we have
1. Mechanical system.2. Electrical system.3. Electronic
system.4. Thermal system.5. Hydraulic system.6. Chemical system
etc.Before I describe these systems in detail let us know, what is
the meaning of modeling of the system?Mathematical modelling of
control systemis the process of drawing the block diagram for these
types of systems in order to determine the performance and the
transfer functions. Now let us describe mechanical and electrical
type of systems in detail. We will derive analogies between
mechanical and electrical system only which are most important in
understanding the theory of control system.Mathematical Modelling
of Mechanical SystemsWe have two types of mechanical systems.
Mechanical system may be a linear mechanical system or it may be a
rotational mechanical type of system.In linear mechanical type of
systemswe have three variables 1. Force which is represented by
F.2. Velocity which is represented by V.3. Linear displacement
represented by XAnd also we have three parameters-1. Mass which is
represented by M.2. Coefficient of viscous friction which is
represented by B.3. Spring constant which is represented by K.In
rotational mechanical type of systemswe have three variables-1.
Torque which is represented by T.2. Angular velocity which is
represented by 3. Angular displacement represented by And also we
have two parameters 1. Moment of inertia which is represented by
J.2. Coefficient of viscous friction which is represented by B.Now
let us consider the linear displacement mechanical system which is
shown below-
We have already marked various variables in the diagram itself.
We have x is the displacement as shown in the diagram. From the
Newtons second law of motion, we can write force as-
From the diagram we can see that the,
On substituting the values of F1, F2and F3in the above equation
and taking the Laplace transform we have the transfer function
as,
This equation ismathematical modelling of mechanical control
system.
Mathematical Modelling of Electrical SystemIn electrical type of
systemswe have three variables
1. Voltage which is represented by V.2. Current which is
represented by I.3. Charge which is represented by Q.And also we
have three parameters which are active and passive elements 1.
Resistancewhich is represented by R.2. Capacitance which is
represented by C.3. Inductance which is represented by L.Now we are
in condition to derive analogy between electrical and mechanical
types of systems. There are two types of analogies and they are
written below:Force Voltage Analogy :In order to understand this
type of analogy, let us consider a circuit which consists of series
combination ofresistor,inductorand capacitor.
AvoltageV is connected in series with these elements as shown in
the circuit diagram. Now from the circuit diagram and with the help
of KVL equation we write the expression forvoltagein terms of
charge,resistance,capacitorandinductoras,
Now comparing the above with that we have derived for the
mechanical system we find that-
1. Mass (M) is analogous toinductance(L).2. Force is analogous
tovoltageV.3. Displacement (x) is analogous to charge (Q).4.
Coefficient of friction (B) is analogous toresistanceR and5. Spring
constant is analogous to inverse of thecapacitor(C).This analogy is
known as forcevoltageanalogy.Force Current Analogy:In order to
understand this type of analogy, let us consider a circuit which
consists of parallel combination ofresistor,inductorand
capacitor.
AvoltageE is connected in parallel with these elements as shown
in the circuit diagram. Now from the circuit diagram and with the
help of KCL equation we write the expression for current in terms
of flux,resistance,capacitorandinductoras,
Now comparing the above with that we have derived for the
mechanical system we find that,
1. Mass (M) is analogous to Capacitor (C).2. Force is analogous
to current I.3. Displacement (x) is analogous to flux ().4.
Coefficient of friction (B) is analogous toresistance1/ R and5.
Spring constant K is analogous to inverse of theinductor(L).This
analogy is known as force current analogy.Now let us consider the
rotational mechanical type of system which is shown below we have
already marked various variables in the diagram itself. We have is
the angular displacement as shown in the diagram. From the
mechanical system, we can write equation for torque (which is
analogous to force) as torque as,
From the diagram we can see that the,
On substituting the values of T1, T2and T3in the above equation
and taking the Laplace transform we have the transfer function
as,
This equation is mathematical modelling of electrical control
system.
When we study the analysis of thetransient state and steady
state response of control systemit is very essential to know a few
basic terms and these are described below.
Standard Input Signals :These are also known as test input
signals. The input signal is very complex in nature, it is complex
because it may be a combination of various other signals. Thus it
is very difficult to analyze characteristic performance of any
system by applying these signals. So we use test signals or
standard input signals which are very easy to deal with. We can
easily analyze the characteristic performance of any system more
easily as compared to non standard input signals. Now there are
various types of standard input signals and they are written
below:Unit Impulse Signal :In the time domain it is represented by
(t). TheLaplace transformationof unit impulse function is 1 and the
corresponding waveform associated with the unit impulse function is
shown below.
Unit Step Signal :In the time domain it is represented by u (t).
TheLaplace transformationof unit step function is 1/s and the
corresponding waveform associated with the unit step function is
shown below.
Unit Ramp signal :In the time domain it is represented by r (t).
TheLaplace transformationof unit ramp function is 1/s2and the
corresponding waveform associated with the unit ramp function is
shown below.Unit Ramp SignalParabolic Type Signal :In the time
domain it is represented by t2/ 2. TheLaplace transformationof
parabolic type of the function is 1 / s3and the corresponding
waveform associated with the parabolic type of the function is
shown below.
Sinusoidal Type Signal :In the time domain it is represented by
sin (t).TheLaplace transformationof sinusoidal type of the function
is / (s2+ 2) and the corresponding waveform associated with the
sinusoidal type of the function is shown below.
Cosine Type of Signal :In the time domain it is represented by
cos (t). TheLaplace transformationof the cosine type of the
function is / (s2+ 2) and the corresponding waveform associated
with the cosine type of the function is shown below,
Now are in a position to describe the two types of responses
which are a function of time.Transient Response of Control SystemAs
the name suggeststransient response of control systemmeans changing
so, this occurs mainly after two conditions and these two
conditions are written as follows- Condition one :Just after
switching on the system that means at the time of application of an
input signal to the system. Condition second :Just after any
abnormal conditions. Abnormal conditions may include sudden change
in the load, short circuiting etc.Steady State Response of Control
SystemSteady state occurs after the system becomes settled and at
the steady system starts working normally.Steady state response of
control systemis a function of input signal and it is also called
as forced response.Now the transient state response ofcontrol
systemgives a clear description of how the system functions
duringtransient state and steady state response of control
systemgives a clear description of how the system functions during
steady state. Therefore the time analysis of both states is very
essential. We will separately analyze both the types of responses.
Let us first analyze the transient response. In order to analyze
the transient response, we have some time specifications and they
are written as follows:Delay Time :This time is represented by td.
The time required by the response to reach fifty percent of the
final value for the first time, this time is known as delay time.
Delay time is clearly shown in the time response specification
curve.Rise Time :This time is represented by tr. We define rise
time in two cases:1. In case of under damped systems where the
value of is less than one, in this case rise time is defined as the
time required by the response to reach from zero value to hundred
percent value of final value.2. In case of over damped systems
where the value of is greater than one, in this case rise time is
defined as the time required by the response to reach from ten
percent value to ninety percent value of final value.Peak Time
:This time is represented by tp. The time required by the response
to reach the peak value for the first time, this time is known as
peak time. Peak time is clearly shown in the time response
specification curve.Settling Time :This time is represented by ts.
The time required by the response to reach and within the specified
range of about (two percent to five percent) of its final value for
the first time, this time is known as settling time. Settling time
is clearly shown in the time response specification curve.Maximum
Overshoot :It is expressed (in general) in percentage of the steady
state value and it is defined as the maximum positive deviation of
the response from its desired value. Here desired value is steady
state value.Steady State Error :It can be defined as the difference
between the actual output and the desired output as time tends to
infinity.Now we are in position we to do a time response analysis
of a first order system.Transient State and Steady State Response
of First Order Control SystemLet us consider the block diagram of
the first order system.
From this block diagram we can find overall transfer function
which is linear in nature. The transfer function of the first order
system is 1/((sT+1)). We are going to analyze the steady state and
transient response ofcontrol systemfor the following standard
signal.1. Unit impulse.2. Unit step.3. Unit ramp.Unit impulse
response :We have Laplace transform of the unit impulse is 1. Now
let us give this standard input to a first order system, we
have
Now taking the inverse Laplace transform of the above equation,
we have
It is clear that thesteady state response of control
systemdepends only on the time constant T and it is decaying in
nature.
Unit step response :We have Laplace transform of the unit
impulse is 1/s. Now let us give this standard input to first order
system, we have
With the help of partial fraction, taking the inverse Laplace
transform of the above equation, we have
It is clear that the time response depends only on the time
constant T. In this case the steady state error is zero by putting
the limit t is tending to zero.
Unit ramp response :We have Laplace transform of the unit
impulse is 1/s2. Now let us give this standard input to first order
system, we have
With the help of partial fraction, taking the inverse Laplace
transform of the above equation we have
On plotting the exponential function of time we have T by
putting the limit t is tending to zero.
Transient State and Steady State Response of Second Order
Control SystemLet us consider the block diagram of the second order
system.
From this block diagram we can find overall transfer function
which is nonlinear in nature. The transfer function of the second
order system is (2) / ( s ( s + 2 )). We are going to analyze
thetransient state response of control systemfor the following
standard signal.Unit impulse response :We have Laplace transform of
the unit impulse is 1. Now let us give this standard input to
second order system, we have
Where is natural frequency in rad/sec and is damping ratio.
Unit step response :We have Laplace transform of the unit
impulse is 1/s. Now let us give this standard input to first order
system, we have
With the help of partial fraction, taking the inverse Laplace
transform of the above equation we have
Now we will see the effect of different values of on the
response. We have three types of systems on the basis of different
values of .
1. Under damped system :A system is said to be under damped
system when the value of is less than one. In this case roots are
complex in nature and the real parts are always negative. System is
asymptotically stable. Rise time is lesser than the other system
with the presence of finite overshoot.2. Critically damped system
:A system is said to be critically damped system when the value of
is one. In this case roots are real in nature and the real parts
are always repetitive in nature. System is asymptotically stable.
Rise time is less in this system and there is no presence of finite
overshoot.3. Over damped system :A system is said to be over damped
system when the value of is greater than one. In this case roots
are real and distinct in nature and the real parts are always
negative. System is asymptotically stable. Rise time is greater
than the other system and there is no presence of finite
overshoot.4. Sustained Oscillations :A system is said to be sustain
damped system when the value of zeta is zero. No damping occurs in
this case.Now let us derive the expressions for rise time, peak
time, maximum overshoot, settling time and steady state error with
a unit step input for second order system.Rise time :In order to
derive the expression for the rise time we have to equate the
expression for c(t) = 1. From the above we have
On solving above equation we have expression for rise time equal
to
Peak Time :On differentiating the expression of c(t) we can
obtain the expression for peak time. dc(t)/ dt = 0 we have
expression for peak time,
Maximum overshoot :Now it is clear from the figure that the
maximum overshoot will occur at peak time tp hence on putting the
valye of peak time we will get maximum overshoot as
Settling Time :Settling time is given by the expression
Steady state error :The steady state error is diffrerence
between the actual output and the desired output hence at time
tending to infinity the steady state error is zero.
For any control system there exists a reference input termed as
excitation or cause which operates through a transfer operation
termed astransfer functionand produces an effect resulting in
controlled output or response. Thus the cause and effect
relationship between the output and input is related to each other
through atransfer function.
It is not necessary that the output will be of same category as
that of the input. For example in case of anelectrical motor, the
input is an electrical quantity and output is a mechanical one. In
control system all mathematical functions are converted to their
corresponding Laplace transforms. So the transfer function is
expressed as a ratio of Laplace transform of input function to
Laplace transform of output function.
The transfer function can be expressed as,
While doing Laplace transform, while determining transfer
function we assume all initial conditions to be zero.
The transfer function of a control system is defined as the
ration of the Laplace transform of the output variable to Laplace
transform of the input variable assuming all initial conditions to
be zero.Procedure for determining the transfer function of a
control system are as follows :1. We form the equations for the
system2. Now we take Laplace transform of the system equations,
assuming initial conditions as zero.3. Specify system output and
input4. Lastly we take the ratio of the Laplace transform of the
output and the Laplace transform of the input which is the required
transfer function
Methods of obtaining a Transfer function: There are major two
ways of obtaining a transfer function for the control system .The
ways are Block diagram method : It is not convenient to derive a
complete transfer function for a complex control system. Therefore
the transfer function of each element of a control system is
represented by a block diagram. Block diagram reduction techniques
are applied to obtain the desired transfer function. Signal Flow
graphs : The modified form of a block diagram is a signal flow
graph. Block diagram gives a pictorial representation of a control
system . Signal flow graph further shortens the representation of a
control system.The transfer function of a system is completely
specified in terms of its poles and zeroes and the gain factor. Let
us know about the poles and zeroes of a transfer function in
brief.
Where, K = system gain,z1, z2, zm= zeros of the transfer
functionp1, p2, pn= poles of the transfer function
Putting the denominator of equation (i) equal to zero we get the
poles value of the transfer function. For this the T.F is
infinity.
Putting the numerator of equation (ii) equal to zero we get the
value of zero of the transfer function. For this T.F is equal to
zero.
There are two types of transfer functions :-i) Open loop
transfer function( O.L.T.F) : Transfer function of the system
without feedback path or loop.ii) Closed loop transfer function
(C.L.T.F) : Transfer function of the system with feedback path or
loop.
Theroot locus technique in control systemwas first introduced in
the year 1948 by Evans. Any physical system is represented by a
transfer function in the form of
We can find poles and zeros from G(s). The location of poles and
zeros are crucial keeping view stability, relative stability,
transient response and error analysis. When the system put to
service strayinductanceandcapacitanceget into the system, thus
changes the location of poles and zeros. Inroot locus technique in
control systemwe will evaluate the position of the roots, their
locus of movement and associated information. These information
will be used to comment upon the system performance.
Now before I introduce what is a root locus technique, it is
very essential here to discuss a few of the advantages of this
technique over other stability criteria. Some of the advantages of
root locus technique are written below.Advantages of Root Locus
Technique1. Root locus technique in control system is easy to
implement as compared to other methods.2. With the help of root
locus we can easily predict the performance of the whole system.3.
Root locus provides the better way to indicate the parameters.Now
there are various terms related to root locus technique that we
will use frequently in this article.1. Characteristic Equation
Related to Root Locus Technique :1 + G(s)H(s) = 0 is known as
characteristic equation. Now on differentiating the characteristic
equation and on equating dk/ds equals to zero, we can get break
away points.2. Break away Points :Suppose two root loci which start
from pole and moves in opposite direction collide with each other
such that after collision they start moving in different directions
in the symmetrical way. Or the break away points at which multiple
roots of the characteristic equation 1 + G(s)H(s)= 0 occur. The
value of K is maximum at the points where the branches of root loci
break away. Break away points may be real, imaginary or complex.3.
Break in Point :Condition of break in to be there on the plot is
written below :Root locus must be present between two adjacent
zeros on the real axis.4. Centre of Gravity :It is also known
centroid and is defined as the point on the plot from where all the
asymptotes start. Mathematically, it is calculated by the
difference of summation of poles and zeros in the transfer function
when divided by the difference of total number of poles and total
number of zeros. Centre of gravity is always real & it is
denoted by A.
Where N is number of poles & M is number of zeros.5.
Asymptotes of Root Loci :Asymptote originates from the centre of
gravity or centroid and goes to infinity at definite some angle.
Asymptotes provide direction to the root locus when they depart
break away points.6. Angle of Asymptotes :Asymptotes makes some
angle with the real axis and this angle can be calculated from the
given formula,
Where p = 0, 1, 2 . (N-M-1)N is the total number of polesM is
the total number of zeros.7. Angle of Arrival or Departure :We
calculate angle of departure when there exists complex poles in the
system. Angle of departure can be calculated as 180-{(sum of angles
to a complex pole from the other poles)-(sum of angle to a complex
pole from the zeros)}.8. Intersection of Root Locus with the
Imaginary Axis :In order to find out the point of intersection root
locus with imaginary axis, we have to use Routh Hurwitz criterion.
First, we find the auxiliary equation then the corresponding value
of K will give the value of the point of intersection.9. Gain
Margin :We define gain margin as a by which the design value of the
gain factor can be multiplied before the system becomes unstable.
Mathematically it is given by the formula
10. Phase Margin :Phase margin can be calculated from the given
formula:
11. Symmetry of Root Locus :Root locus is symmetric about the x
axis or the real axis.How to determine the value of K at any point
on the root loci ? Now there are two ways of determining the value
of K, each way is described below.
1. Magnitude Criteria :At any points on the root locus we can
apply magnitude criteria as,
Using this formula we can calculate the value of K at any
desired point.2. Using Root Locus Plot :The value of K at any s on
the root locus is given by
Root Locus PlotThis is also known as root locus technique in
control system and is used for determining the stability of the
given system. Now in order to determine the stability of the system
using the root locus technique we find the range of values of K for
which the complete performance of the system will be satisfactory
and the operation is stable.Now there are some results that one
should remember in order to plot the root locus. These results are
written below:1. Region where root locus exists :After plotting all
the poles and zeros on the plane, we can easily find out the region
of existence of the root locus by using one simple rule which is
written below,
Only that segment will be considered in making root locus if the
total number of poles and zeros at the right hand side of the
segment is odd.2. How to calculate the number of separate root loci
? :A number of separate root loci are equal to the total number of
roots if number of roots are greater than the number of poles
otherwise number of separate root loci is equal to the total number
of poles if number of roots are greater than the number of
zeros.Procedure to Plot Root LocusKeeping all these points in mind
we are able to draw theroot locus plotfor any kind of system. Now
let us discuss the procedure of making a root locus.1. Find out all
the roots and poles from the open loop transfer function and then
plot them on the complex plane.2. All the root loci starts from the
poles where k = 0 and terminates at the zeros where K tends to
infinity. The number of branches terminating at infinity equals to
the difference between the number of poles & number of zeros of
G(s)H(s).3. Find the region of existence of the root loci from the
method described above after finding the values of M and N.4.
Calculate break away points and break in points if any.5. Plot the
asymptotes and centroid point on the complex plane for the root
loci by calculating the slope of the asymptotes.6. Now calculate
angle of departure and the intersection of root loci with imaginary
axis.7. Now determine the value of K by using any one method that I
have described above.By following above procedure you can easily
draw theroot locus plotfor any open loop transfer function.8.
Calculate the gain margin.9. Calculate the phase margin.10. You can
easily comment on the stability of the system by using Routh
array.
Bode plotswere first introduced by H.W. Bode, when he was
working at Bell labs in the United States. Now before I describe
what are this plots it is very essential here to discuss a few
advantages over other stability criteria. Some of the advantages of
this plot are written below:
Advantages of Bode Plot1. It is based on the asymptotic
approximation, which provides a simple method to plot the
logarithmic magnitude curve.2. The multiplication of various
magnitude appears in the transfer function can be treated as an
addition, while division can be treated as subtraction as we are
using a logarithmic scale.3. With the help of this plot only we can
directly comment on the stability of the system without doing any
calculations.4. Bode plotsprovides relative stability in terms
ofgain marginandphase margin.5. It also covers from low frequency
to high frequency range.Now there are various terms related to this
plot that we will use frequently in this article.1. Gain
Margin:Greater will thegain margingreater will be the stability of
the system. It refers to the amount of gain, which can be increased
or decreased without making the system unstable. It is usually
expressed in dB.2. Phase Margin:Greater will thephase margingreater
will be the stability of the system. It refers to the phase which
can be increased or decreased without making the system unstable.
It is usually expressed in phase.3. Gain Cross Over Frequency:It
refers to the frequency at which magnitude curve cuts the zero dB
axis in the bode plot.4. Phase Cross Over Frequency:It refers to
the frequency at which phase curve cuts the negative times the 180
degree axis in this plot.5. Corner Frequency:The frequency at which
the two asymptotes cuts or meet each other is known as break
frequency or corner frequency.6. Resonant Frequency:The value of
frequency at which the modulus of G (j) has a peak value is known
as resonant frequency.7. Factors:Every loop transfer function (i.e.
G(s) H(s)) product of various factors like constant term K,
Integral factors (j), first order factors ( 1 + jT)( n)where n is
an integer, second order or quadratic factors.8. Slope:There is a
slope corresponding to each factor and slope for each factor is
expressed in the dB per decade.9. Angle:There is an angle
corresponding to each factor and angle for each factor is expressed
in the degrees.Bode PlotThese are also known as logarithmic plot
(because we draw these plots on semi-log papers) and are used for
determining the relative stabilities of the given system. Now in
order to determine the stability of the system using bode plot we
draw two curves, one is for magnitude called magnitude curve
another for phase calledBode phase plot.Now there are some results
that one should remember in order to plot the Bode curve. These
results are written below: Constant term K:This factor has a slope
of zero dB per decade. There is no corner frequency corresponding
to this constant term. The phase angle associated with this
constant term is also zero. Integral factor 1/(j)n:This factor has
a slope of -20 n (where n is any integer)dB per decade. There is no
corner frequency corresponding to this integral factor. The phase
angle associated with this integral factor is -90 n here n is also
an integer. First order factor 1/ (1+jT):This factor has a slope of
-20 dB per decade. The corner frequency corresponding to this
factor is 1/T radian per second. The phase angle associated with
this first factor is -tan- 1(T). First order factor (1+jT):This
factor has a slope of 20 dB per decade. The corner frequency
corresponding to this factor is 1/T radian per second. The phase
angle associated with this first factor is tan- 1(T) . Second order
or quadratic factor : [{1/(1+(2/)} (j) + {(1/2)} (j)2)]:This factor
has a slope of -40 dB per decade. The corner frequency
corresponding to this factor is nradian per second. The phase angle
associated with this first factor is tan-1{ (2 / n) / (1-( / n)2)}
.Keeping all these points in mind we are able to draw the plot for
any kind of system. Now let us discuss the procedure of making a
bode plot:
1. Substitute the s = j in the open loop transfer function G(s)
H(s).2. Find the corresponding corner frequencies and tabulate
them.3. Now we are required one semi-log graph chooses a frequency
range such that the plot should start with the frequency which is
lower than the lowest corner frequency. Mark angular frequencies on
the x-axis, mark slopes on the left hand side of the y-axis by
marking a zero slope in the middle and on the right hand side mark
phase angle by taking -180 degrees in the middle.4. Calculate the
gain factor and the type or order of the system.5. Now calculate
slope corresponding to each factor.For drawing theMagnitude
curve:(a) Mark the corner frequency on the semi log graph
paper.(b)Tabulate these factors moving from top to bottom in the
given sequence.1. Constant term K.2. Integral factor 1/(j)n.3.
First order factor 1/ (1+jT).4. First order factor (1+jT).5. Second
order or quadratic factor : [{1/(1+(2/)} (j) + {(1/2)} (j)2)](c)
Now sketch the line with the help of corresponding slope of the
given factor. Change the slope at every corner frequency by adding
the slope of the next factor. You will get magnitude plot.(d)
Calculate the gain margin.For drawing theBode phase plot:1.
Calculate the phase function adding all the phases of factors.2.
Substitute various values to above function in order to find out
the phase at different points and plot a curve. You will get a
phase curve.3. Calculate the phase margin.Stability Conditions of
Bode PlotsStability conditions are given below :1. For Stable
System :Both the margins should be positive. Or phase margin should
be greater than the gain margin.2. For Marginal Stable System :Both
the margins should be zero. Or phase margin should be equal to the
gain margin.3. For Unstable System :If any of them is negative. Or
phase margin should be less than the gain margin.