Embed Size (px)
Citation preview

Background and Reference Material
Andrei Tokmakoff 06/09/2017
Probability and Statistics
Probability Distribution
P(X) is a probability distribution for observing a value X in a data set of multiple observations. It
can describe either a discrete (i = 1 to N) data set or continuous function. For the continuous
distribution, P(X) is known as a probability density, and P(X) dX is the probability of observing a
value between X and X + dX within a large sample. All probability distributions are normalized
such that
Discrete Continuous
Pi1
i1
N
1P X dX
The mean or average value of X for this distribution is
1 1
1 N N
i i ii i
X X PX X P X dXN
The root mean square value of the distribution is the square root of the mean square value of x:
1/22rmsX X
The mean is the first moment of the distribution, the mean square value is the second moment, and
the nth moment of P(x) is
1 1
1 N Nn n n n
i i ii i
X X PX X P X dXN
The width of the distribution function about its mean is quantified through the standard deviation
σ or variance σ2:
22 2X X
Gaussian Distribution
The Gaussian normal distribution is a continuous distribution function commonly used to describe
a large number of independent samples from a random distribution.
2
22
1 ( )exp
22
X XP X
The distribution function is completely described by its mean and variance. All higher moments
of this distribution are zero. The most probable value, or peak, of the distribution is the mean, and
the width is given by the standard deviation. The probability density with ±1σ of the mean is 68.2%

2
and within ±2σ is 95.4%. The full-width of P(X) at half the maximum height (FWHM) is 28ln 2 2.355 .
Binomial and Poisson Distributions
A binomial distribution is a discrete probability distribution that relates to the number of times of
observing N successful events from a series of M independent trials on a binary variable (yes/no;
up/down). For instance the number of times of observing N copies of the amino acid tyrosine
within a protein sequence of length M. Alternatively we can say that it gives the probability that N
random events happen during a given period of time, M. Like the number of barrier crossings
(jumps) during a time window in a two-state trajectory. Consider the number of ways of putting N
indistinguishable objects into M equivalent boxes:
!
!( )!
MM
NN M N
(Note: In the limit M ≫N, Ω ≈ MN/N!). The choices made here are binary, since any given box
can either be empty or occupied. Ω is also known as the binomial coefficient. However, unlike a
coin toss, a binary variable need not have equal probability for the two outcomes. We can say that
we know the probability that a box is occupied is po. Then the probability that a box is empty is pe
= 1‒po. The probability that in a given realization with M boxes that N are occupied and M‒N are
empty is N M No ep p . Then multiplying the probability for a given realization and the number of
possible realizations, the probability of observing N of M boxes occupied is
!( , ) (1 )
!( )!N M N N M N
o e o o
M MP N M p p p p
N N M N
This is the binomial distribution. The average number of occupied boxes is N = N po. A Gaussian
distribution emerges from the binomial distribution in the limit that the number of trials becomes
large (M→∞). The mean value of the distribution is Npo and standard deviation is Npo(1‒po).
A Poisson distribution emerges in the limit that the number or trials (M) becomes large and the
probability of observing an occupied box is small, po ≪ 1.
( )!
N NN eP N
N

3
The mean of the Poisson distribution is N and the standard deviation σ = N 1/2. Fluctuations in
N scale as σ, and the fluctuations relative to the mean as 1/2/ N N . Then we see that
fluctuations are most apparent to the observer for small N with the biggest contrast for N = 1.1
1. M. B. Jackson, Molecular and Cellular Biophysics. (Cambridge University Press, Cambridge, 2006), Ch. 12.

4
Constant and Units
Practical Units and Identities for Biophysical Purposes
1 m 109 nm 1010 Å 1012 pm
1 nm 109 m
1 pN 1012 N
1 aJ 1018 J zJ 1021 J
e2
40
230 pN nm2 230 zJ nm
At 300 K
kBT 4.1 pN nm 2.5 kJ/mol 0.60 kcal/mol
1
40
e2
kBT 56 nm
kBT
e 25 mV

5
Thermodynamics
First Law
– –dU dq dw
w: Work performed by the surroundings on the system.
Mechanical work: linear displacement, stretching surface against surface tension, and
volume expansion against an external pressure.
dw f dr da p dV ext ext
Electrical work: dw q E dr
Magnetic work: dw M dB is field is external to the system or dw B dM if the field
is internal to the system.
q: Heat added to the system.
C: Heat capacity links heat and temperature. At constant pressure: –p pdq C dT
Second Law
–revdq
dST
State Functions
Internal Energy, U: U q w dU TdS pdV dN Natural variables: N, S, V
Enthalpy, H: H U pV dH TdS Vdp dN Natural variables: N, S, p
2
12 1( ) ( )
T
pTH T H T C dT
Helmholtz free energy, A or F: A U TS dA pdV SdT dN Natural variables: N, V, T
more generally: revdA S dT w
where i ii
revw p dV dN f dR da dq
Gibbs free energy, G: G H TS A pV dG SdT Vdp dN Natural variables: N, p, T
more generally: revdG SdT w

6
where wrevV dp
idN
ii f dR da dq
For a reversible process at constant T and p, ΔG is equal to the non-pV work done on the system
by the surroundings. Generally: (dG)T ,p
wnon-pV
.
Chemical potential: , , , , j i j i
ii iT p N T V N
G AN N
Entropy: p V
G AS
T T
If you know the free energy, you know everything!
V G
p
T p
A
V
T
H G TS H G T
G
T
p
U H pV U G T
G
T
p
pG
p
T
A U TS A G p
G
p
T
Cp T
S
T
p
Cp T
2G
T 2
p
CV
UT
V ,N
Spontaneous Processes
Conditions that determine the direction of spontaneous change and the conditions for equilibrium
, , , , ,
, , , ,
0 0 0
0 0
p T N V T N H p
V S N p S N
dG dA dS
dU dH
Chemical Equilibria
Grxn0 H
rxn0 TS
rxn0 G
rxn0 N
i
i0
i
products
Nj
j0
j
reactants
Keq exp(Grxn
0 / RT )

7
Statistical Thermodynamics
The partition functions play a central role in statistical mechanics. All the thermodynamic
functions can be calculated from them.
Microcanonical Ensemble (N,V,E)
All microstates are equally probable:
P = 1/Ω where Ω is the number of degenerate microstates.
lnS k Boltzmann entropy in terms of degeneracy
Canonical Ensemble (N,V,T)
Average energy E is fixed.
Canonical Partition Function: Q
/
/
iE kT
i
E kT
e
E
Q
e d
For one particle in n dimensions:
( , )/1 H q p kT n nn
Q e dq dph
The classical partition function for N non-interacting particles in 3D:
3 33 3 3 ( , )/3
3 3 3 3 32
1
, where , ,
N NN N N H p q kTN
NN i i i i
Q d p d p eh
q q q q q x y z
If the kinetic and potential energy terms in the Hamiltonian are separable as 3 3N NT p V q ,
then
3 33 ( )/ 3 ( )/3
3
1N NN V q kT N T p kTN
N
Q dq e dp eh
where 1/22 / 2h mkT . So
3 /33
1 NV q kTNN
Q dq e

8
Microstate Probabilities
/iE kT
i i
eP E
Q
or describing the probability of occupying microstates of an energy Ej, which have a
distinguishable degeneracy of g(Ej):
/( ) jE kT
jj j
g E eP E
Q
or as a probability density:
( )/E r kTeP r
Q
Internal Energy
U E PjE
jj
1
QE
jeE j /kT
j
Helmholtz Free Energy
Q(N,T,V) leads to A(N,T,V). Using dA pdV SdT dN :
A U TS U TA
T
V ,N
A kT lnQ

9
All the other functions follow from Q, U and A
U
T 2
1
T
A
T
V ,N
A
T 2
A T T
V ,N
klnQ
T
V ,N
U kT 2 lnQ
T
V ,N
CV UT
V ,N
S ATU
T k lnQ kT
lnQT
V ,N
Cp T
S
T
p
p AV
T ,N
kTlnQV
T ,N
AN
T ,V
kTlnQN
T ,V
Entropy
Entropy in terms of microstate probabilities and degeneracies
Sk U A
kT Pi
Ei
kTi lnQ But
Ei
kT lneEi kT , so
Sk P
ii lneEi kT lnQ
Pi
i ln
eEi kT
Q
Pii ln Pi
S k Pi ln Pii Gibbs equation: S in terms of microstate probabilities

10
Ensemble Averages
Other internal variables (X) can be statistically described by
/
1
iE kTN
i i i ii
eX PX P E
Q
For our purposes, we will see that translational, rotational, and conformational degrees of freedom
are separable
Q Qtrans
Qrot
Qconf
...
Grand Canonical Ensemble (μ, V, T)
Average energy E and average particle number Nj are fixed. Thermodynamic quantities depend
on microstates (i) and particle type (j). ( )iP j is the probability that a particle of type j will occupy
a microstate of energy Ei:
Pi( j)
eEi ( j )/kBT e j N ( j )/kBT
U E P
i( j)E
i( j)
i
j and N P
i( j)
i
j N ( j)
The grand canonical partition function is
Q(Nj,V ,T )e
j N ( j )/kBT
j
Stirling’s Approximation
For large N:
N ! N ln N N
or N !N
e
N
2N N ! N ln N N 1
2ln(2N )
First Law Revisited
Let’s relate work and the action of a force to changes in statistical thermodynamic variables:2
The internal energy:
2. T. L. Hill, An Introduction to Statistical Thermodynamics. (Addison-Wesley, Reading, MA, 1960), pp. 11–13,
66–77.

11
U E PjE
jj
dU d E Ej
j dP
j P
jj dE
j
Note the relationship between this expression and the First Law:
dU d–q d–w
d–qrev TdS E jj dPj
dw pdV Pjj dE j

12
Continuum Electrostatics
The interaction of charges can be formulated through a
Force, Field, or Potential.
Consider the interaction between two ions A and B,
separated by a distance r, with charges qA and qB.
Force
Coulomb’s Law gives the force that B exerts on A.
2
1ˆ
4A B
AB ABAB
q qf r
r
Work
Electrical work comes from moving charges
dw f dr
As long as q and are independent of r, and the process is
reversible, then work only depends on r, and is independent of path.
To move particle B from point 1 at a separation r0 to point 2 at a
separation r requires the following work
1 20
1 11
4 A Bw q qr r
Field, E
The electric field is a vector quantity that describes the action of charge B at point A is
2
1ˆ( )
4B
AB A ABAB
qE r
r r
ABr is a unit vector pointing from Br to Ar . E is related to force that charged particle B exerts on a
charged test particle at A through
( )A A AB Af q E r
More generally for the field exerted by multiple charged particles at point rA is the vector sum of
the field from multiple charges (i):
2
1ˆ( ) ( )
4i
A Ai A Aii i Ai
qE E r
r r r
A B
qA qB
rAB
( )
| |
ˆ /
AB A B
AB AB
AB AB
r
r r
r r r
r
r
A
1
qA
qBr0
r
2

13
where | |Ai A ir r r and the unit vector ˆ ( ) /Ai A i Air r r r . Alternatively for a continuum charge
density ρ(r),
3
1 ( )( ) ( )
4 | |A
A AA
E d
r r
r r rr r
Electrical work comes from moving charges in an electrostatic field is
dw q E dr
Electrostatic Potential, Φ
The electrostatic potential Φ is a scalar quantity defined in terms of the electric field through
EA
A or E r dr
The integral expression illustrates the relationship between the electrostatic potential at point A
and the work needed to move a particle within that potential. The electrostatic potential at point
A, which results from a point charge at B, is
1
4B
AAB
q
r
or for a continuum: 1 ( )
( )4 | |A A
A
d
r
r rr r
is related to the potential energy for interaction between two charges as
1
4A B
AB A A B BAB
q qU q q
r
This is the Coulomb interaction potential. More generally, for many charges, the interaction energy
is
1( )
2
1( ) ( )
2
AB i Aii
A A A A
U q r
d
r r r
The factor of ½ is to assure that one does not double count the interaction between two particles.

Water and Aqueous Solutions
Andrei Tokmakoff, Concepts in Biophysical Chemistry, April 22, 2018
1. Fluids What is a fluid? Almost everything that we will discuss is soft matter under physiological
temperature conditions: liquids and solutions, cytoplasm and cytosol, DNA and proteins in
solution, membranes, micelles, colloids, gels… All of these materials can in some respect be
considered a fluid. So, what is a fluid?
A substance that flows, deforms, and changes shape when subject to a force, or stress.
It has no fixed shape, but adapts its surface to the shape of its container. Gasses are also
fluids, but we will focus on fluids that are mostly incompressible.
For physicists, fluids are commonly associated with flow—a non-equilibrium property—and how
matter responds to forces (i.e., “Newtonian fluids”). This topic—“rheology”—will be discussed in
more detail later. From this perspective, all soft condensed matter can be considered a fluid.
For chemists, fluids most commonly appear as liquids and solutions. Chemists typically use a
molecular description for the solute, but less so for the solvent. However, chemists have a clear
appreciation of how liquids influence chemical behavior and reactivity, a topic commonly called
“solvation”.
The most common perspective of fluids is as continuous dielectric media, however fluids can be
multicomponent heterogeneous mixtures.
For our biophysical purposes, we use the perspectives above, with a particular interest in the
uniquely biological fluid: water. Since we are particularly interested in molecular-scale
phenomena, we will add some additional criteria:
Composition: Fluids are dense media composed of particulate matter (atoms, molecules,
proteins…) that can interact with one another. Since no two particles can occupy the same
volume, each particle in a fluid has “excluded volume” that is not available to the remaining
particles in the system.
“Structure”: Fluids are structured locally on the distance scale of the particle size by their
packing and cohesive interactions, but are macroscopically disordered.
The midrange or mesoscale distances involve interactions between multiple particles,
leading to correlated motions of the constituents.
“Flow” is a manifestation of these correlated structural motions in the mesoscale structure.
Most important: The cohesive forces (intermolecular interactions) between the
constituents of a fluid, and the energy barriers to changing structure, are on the order of

2
kBT (“thermal energy”). Thermal forces are enough to cause spontaneous flow on a
microscopic level even at equilibrium.
Fluids may appear time-invariant at equilibrium, but they are microscopically dynamic. In
many cases, “structure” (the positioning of constituents in space) and the “dynamics”
(time-dependent changes to position) are intimately coupled.

3
Radial Distribution Function
“Structure” implies that the positioning of particles is regular and predictable. This is possible in
a fluid to some degree when considering the short-range position and packing of particles. The
local particle density variation should show some structure in a statistically averaged sense.
Structure requires a reference point, and in the case of a fluid we choose a single particle as the
reference and describe the positioning of other particles relative to that. Since each particle of a
fluid experiences a different local environment, this information must be statistically averaged,
which is our first example of a correlation function. For distances longer than a “correlation
length”, we should lose the ability to predict the relative position of a specific pair of particles. On
this longer length scale, the fluid is homogeneous.
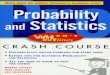
The radial distribution function, g(r), is the most useful measure of
the “structure” of a fluid at molecular length scales. Although it
invokes a continuum description, by “fluid” we mean any dense,
disordered system which has local variation in the position of its
constituent particles but is macroscopically isotropic. g(r) provides a
statistical description of the local packing and particle density of the
system, by describing the average distribution of particles around a
central reference particle. We define the radial distribution function
as the ratio of ⟨ρ(r)⟩, the average local number density of particles at
a distance r, to the bulk density of particles, ρ:
( ) ( ) / g r r
In a dense system, g(r) starts at zero (since it does not count the
reference particle), rises to a peak at the distance characterizing the
first shell of particles surrounding the reference particle (i.e., the 1st
solvation shell), and approaches 1 for long distances in isotropic
media. The probability of finding a particle at a distance r in a shell
of thickness dr is P(r) = 4πr2 g(r) dr, so integrating ρg(r) over the
first peak in gives the average number of particles in the first shell.
The radial distribution function is most commonly used in gasses, liquids, and solutions, since it
can be used to calculate thermodynamic properties such as the internal energy and pressure of the
system. But is relevant at any size scale, such as packing of colloids, and is useful in complex
heterogeneous media, such as the distribution of ions around DNA. For correlating the position of
different types of particles, the radial distribution function is defined as the ratio of the local density
of “b” particles at a distance r from “a” particles, ( ) ( ) / ab abg r r . In practice, ( )ab r is

4
calculated by looking radially from an “a” particle at a shell at distance r and of thickness dr,
counting the number of “b” particles within that shell, and normalizing the count by the volume of
that shell.
Two‐Particle Density Correlation Function1
Let’s look a little deeper, considering particles of the same type, as in an atomic liquid or granular
material. If there are N particles in a volume V, and the position of the ith particle is ri , then the
number density describes the position of particles,
1
N
ii
r r r
The average of a radially varying property given by X(r) is determined by
21( ) ( )4
VX r X r r dr
V
Integrating r over a volume gives the particle number in that volume.
2( )4V
r r dr N
When the integral is over the entire volume, we can use this to obtain the average particle density:
2
0
1( )4
Nr r dr
V V
Next, we can consider the spatial correlations between two particles, i and j. The two-particle
density correlation function is
1 1
,N N
i ji j
r r r r r r
This describes the conditional probability of finding particle i at position ri and particle j at position
rj. We can expand and factor ρ( r , r ) into two terms depending on whether i j or i j :
(1) (2)
, 1
( , )
i i i jr r N r r r r N N r r r r
r r
The first term describes the self-correlations, of which there are N terms: one for each atom.
(1)i iN r r r r
The second term describes the two-body correlations, of which there are N(N‒1) terms. 1. J. P. Hansen and I. R. McDonald, Theory of Simple Liquids, 2nd Ed. (Academic Press, New York, 1986); D. A.
McQuarrie, Statistical Mechanics. (Harper & Row, New York, 1976).

5
(2)
22
2
( , ) 1
, ,
i jr r N N r r r r
Ng r r g r r
V
(2) 2, ( , ) /g r r r r is the two-particle distribution function, which describes spatial
correlation between two atoms or molecules. For isotropic media, it depends only on distance
between particles, ( )g r r g r , and is therefore also called the radial pair-distribution
function.
We can generalize g(r) to a mixture of a and b particles by writing ( )abg r :
/
abab
b
rg r
N V
24b abVN dr r r
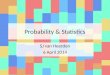
Potential of Mean Force
One can use g(r) to describe the free energy for bringing
two particles together as
lnBW r k T g r
W(r) is known as the potential mean force. We are taking a
free energy which is a function of many internal variables
and projecting it onto a single coordinate. W(r) is a
potential function that can be used to obtain the mean
effective forces that a particle will experience at a given
separation f W r .

6
Excluded Volume
One of the key concepts that arises from a particulate description of matter is excluded volume.
Even in the absence of attractive interactions, at short range the particles of the fluid collide and
experience repulsive forces. These repulsive forces are a manifestation of excluded volume, the
volume occupied by one particle that is not available to another. This excluded volume gives rise
to the structure of solvation shells that is reflected in the short-range form of g(r) and W(r).
Excluded volume also has complex dynamic effects in dense fluids, because one particle cannot
move far without many other particles also moving in some correlated manner.
The excluded volume can be related to g(r) and W(r), making note of the virial expansion. If we
expand the equation of state in the density of the fluid (ρ):
21 ( )B
pB T
k T
The second virial coefficient B2 is half of the excluded volume of the system. This is the leading
source of non-ideality in gasses reflected in the van der Waals equation of state.
22
0
2
0
2 ( ) 1 ( )
1 exp[ ( ) / ]
B
B T r g r dr
r W r k T dr

Water and Aqueous Solutions
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 4/5/2018
2. Lattice Model of a Fluid
Lattice Models
Lattice models provide a minimalist, or coarse-grained, framework for describing the
translational, rotational, and conformational degrees of freedom of molecules, and are
particularly useful for problems in which entropy of mixing, configurational entropy, or excluded
volume are key variables. The lattice forms a basis for enumerating different configurations of
the system, or microstates. Each of these microstates may have a different energy, which is then
used to calculate a partition function.
Q eEi /kBT
i (1)
The thermodynamic quantities then emerge from
ln
ln
iiB
i
B
i
i i
F T Q
S P
U P
k
k P
E
and other internal variables (X) can be statistically described from
/
1
BiE TN
i i i i
k
i
eX P X P E
Q
We will typically work with a macroscopic volume broken into cells,
typically of a molecular size, which we can fill with the fundamental
building blocks in our problem (atoms, molecules, functional groups)
subject to certain constraints. In this section we will concern ourselves
with the mixing of rigid particles, i.e., translational degrees of freedom.
More generally, lattice models can include translational, rotational, and
conformational degrees of freedom of molecules.

2
Lattice Gas
The description of a weakly interacting fluid, gas, solution, or mixture is dominated by the
translational entropy or entropy of mixing. In this case, we are dealing with how molecules
occupy a volume, which leads to a translational partition function. We begin by defining a lattice
and the molecules that fill that lattice:
Parameters: Total volume: V Cell volume: Number of sites: M = V/ Number of particles: N (N≤M)
Fill Factor: x = N/M (0 ≤ x ≤ 1) Number of contacts each cell has with adjacent cells: z
We begin my assuming that all microstates (configurations of occupied sites in the volume) are
equally probable, i.e., Ei = constant. This is the microcanonical ensemble, so the entropy of the
fluid is given by Boltzmann’s equation
lnBS k (2)
where Ω is the number of microstates available to the system. If M is not equal to N, then the
permutations for putting N indistinguishable particles into M sites is given by the binomial
distribution:
!
!( )!
M
N M N
(3)
Also, on cubic lattice, we have 6 contacts that each cell makes with its neighbors. The contact
number is z, which will vary for 2D (z = 4) and 3D (z = 6) problems.
How do we choose the size of v? It has to be considered on a case-by-case basis. The objective of
these models is to treat the cell as the volume that a particle excludes to occupation by other
particles. This need not correspond to an actual molecular dimension in the atomic sense. In the
case of the traditional derivation of the translational partition function for an ideal gas, v is
equivalent to the quantization volume 3/23 2 2 Bh mk T .
From Ω we can obtain the entropy of mixing from lnBS k with the help of Sterling’s
approximation ln( !) ln( )M M M M :
ln ln ( ) ln( )
ln (1 ) ln(1 )
B
B
M M N N M N M N
M x x xk x
S k
(4)
Vacancies are indistinguishable
Particles are indistinguishable

3
In the last line, we introduced a particle fill factor
/x N M
which quantifies the fraction of cells that are occupied by particles, and is also known as the
mole fraction or the packing ratio. Since 1x , the entropy of mixing is always positive.
For the case of a dilute solution or gas, N M , and (1‒x) ≈ 1, so
dilute ln ln BS N x or nk R x
We can derive the ideal gas law /Bp VNk T from this result by making use of the
thermodynamic identity N
p T S V .

4
Binary Fluid
Entropy of Mixing
The thermodynamics of the mixing process is important to phase equilibria, hydrophobicity,
solubility, and related solvation problems. The process of mixing two pure substances A and B is
shown below. We define the composition of the system through the number of A and B particles:
NA and NB and the total number of particles N = NA + NB, which also equals the number of cells.
We begin with two containers of the homogeneous pure fluids and mix them together, keeping
the total number of cells constant. In the case of the pure fluids before mixing, all cells of the
container are initially filled, so there is only one accessible microstate, Ωpure = 1, and
Spure
kB
ln1 0
When the two containers are mixed, the number of possible microstates are given by the
binomial distribution: mix
N ! NA!N
B!.
A 1 B 1 mix
!
! !
A B
N
N N
If these particles have no interactions, each microstate is equally probable, and similar to eq. (4)
we obtain the entropy of the mixture as
Smix NkB xA ln xA xB ln xB (5)
For the mixture, we define the mole fractions for the two
components: /A Ax N N and /B Bx N N . As before, since Ax
and 1Bx , the entropy for the mixture is always positive. The
entropy of mixing is then calculated from
Smix
Smix
(Spure A
Spure B
). Since the entropy of the pure
substances in this model is zero, Smix
Smix
. A plot of this
function as a function of mole fractions illustrates that the
maximum entropy mixture has xA = xB = 0.5.

5
In the absence of interactions between particles, the free energy of mixing is purely entropic with
ΔFmix = ‒TΔSmix. The chemical potential of A particles μA describes the free energy needed to
replace a particle B with an additional A particle, and is obtained from
A B
, ,
ln ln
j i
BB
ii
A
T V N
T x xk
FN
This curve illustrates the increasing challenge of finding available space as the packing fraction
increases.
Intermolecular Interactions
To look at real systems, we now add interactions between particles by assigning an interaction
energy ω between two cells which are in contact. The interaction energy can be positive
(destabilizing) or negative (favorable).
With the addition of intermolecular interactions, each microstate will have a distinct energy, the
canonical partition function can be obtained from eq. (1), and other thermodynamic properties
follow.
In the case of a mixture, we assign separate interaction energies for each adjoining A-A, B-B, or
A-B pair in a given microstate: , ,AA BB AB . How do we calculate the energy of a microstate? m
is the total number of molecular contacts in the volume, and these can be divided into A-A, B-B,
or A-B contacts:

6
AA BB ABm m m m
While m is constant, the counts of specific contacts mij vary by microstate. Then the energy of
the mixture for the single ith microstate can be written as
Emix
mAA
AA m
BB
BB m
AB
AB (6)
and the internal energy comes from an ensemble average of this quantity. An exact calculation of
the internal energy from the partition function would require a sum over all possible
configurations with their individual contact numbers. Instead, we can use a simpler, approximate
approach which uses a strategy that starts by expressing each term in eq. (6) in terms of mAB. We
know:
m
AA (Total contacts for A) (Contactsof A with B)
zN
A
2
mAB
2
(7)
2 2
B ABBB
zN mm (8)
Then we have
mix
pure pure
2 2 2
AA A BB B AA BBAB AB
A B AB
z N z NE m
U U m (9)
The last term in this expression is half the change of interaction energy to switch an A-A and a
B-B contact to form two A-B contacts:
2
AA BBAB (10)
We also recognize that the first two terms are just the energy of the two pure liquids before
mixing. These are calculated by taking the number of cells in the pure liquid (Ni) times the
number of contacts per cell (z) and then divide by two, so you do not double count the contacts.
Upure,i
z
iiN
i
2 (11)
With these expressions, eq. (9) becomes
mix pure pure A B ABE U U m
This equation describes the energy of a microstate in terms of the number of A-B contacts
present mAB.

7
At this point, this is not particularly helpful because it is not practical to enumerate all of the
possible microstates and their corresponding mAB. To simplify our calculation of Umix, we make a
“mean field approximation,” which replaces mAB with its statistical average ⟨mAB⟩:
probability of contact site being B# of contact sites for A
( )
AB
BA A B
m
NN z zx x N
N
(12)
Then for the energy for the mixed state mix mixU E , we obtain:
Umix
Upure A
Upure B
xAx
BNk
BT
AB (13)
Here we have introduced the unitless exchange parameter,
2
AA BBAB AB
B B
z
T Tk k
z
(14)
which expresses Δω (the change in energy on switching a single A and B from the pure state to
the other liquid) in units of kBT. Dividing by z gives the average interaction energy per contact.
0AB → unfavorable A-B interaction
0AB → favorable A-B interaction
We can now determine the change in internal energy on mixing:
Umix
Umix
Upure A
Upure B
xAx
BNk
BT
AB
(15)
Note ΔUmix as a function of composition has its minimum value for a mixture with xA = 0.5,
when 0 AB .
Note that in the mean field approximation, the canonical partition function is
mix
!exp /
! ! A BN N
A B BA B
NQ q q U k T
N N
We kept the internal molecular partition functions here for completeness, but for the simple
particles in this model 1A Bq q .
Free Energy of Mixing1
Using eqs. (5) and (15), we can now obtain the free energy of mixing:
mix mix mix
ln ln
A B AB A A BB B
F U T S
N T x x x x x xk
1. J. H. Hildebrand and R. L. Scott, Regular Solutions. (Prentice-Hall, Englewood Cliffs, N.J., 1962).

8
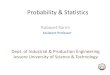
This function is plotted below as a function of mole fraction for different values of the exchange
parameter. When there are no intermolecular interactions (χAB = 0), the mixing is spontaneous
for any mole fraction and purely entropic. Any strongly favorable A-B interaction (χAB < 0) only
serves to decrease the free energy further for all mole fractions.
As χAB increases, we see the free energy for mixing rise, with the biggest changes for the 50/50
mixture. To describe the consequences, let’s look at the curve for 3AB , for which certain
compositions are miscible (ΔFmix < 0) and others immiscible (ΔFmix > 0).
Consider what would happen if we prepare a 50/50 mixture of this solution. The free energy of
mixing is positive at the equilibrium composition of the xA = 0.5 homogeneous mixture,
indicating that the two components are immiscible. However, there are other mixture
compositions that do have a negative free energy of mixing. Under these conditions the solution
can separate into two phases in such a way that ΔFmix is minimized. This occurs at mole fractions

9
of xA 0.07 & 0.93, which shows us that one phase will be characterized by A Bx x and the
other with A Bx x . If we prepare an unequal mixture with positive ΔAmix, for example xA = 0.3,
the system will still spontaneously phase separate although mass conservation will dictate that
the total mass of the fraction with 0.07Ax will be greater than the mass of the fraction at
0.93Ax . As AB
increases beyond 3, the mole fraction of the lesser component decreases as
expected for the hydrophobic effect. Consider if A = water and B = oil. BB and AB are small
and negative, AA is large and negative, and 1AB .
Critical Behavior
Note that 50/50 mixtures with 2 2.8AB have a negative free energy of mixing to create a
single homogeneous phase, yet, the system can still lower the free energy further by phase
separating. As seen in the figure, 2AB marks a crossover from one phase mixtures to two
phase mixtures, which is the signature of a critical point. We can find the conditions for phase
equilibria by locating the free energy minima as a function of χAB, which leads to the phase
diagrams as a function of χAB and T below. The critical temperature for crossover from one- to
two-phase behavior is T0, and Δω is the average differential change in interaction energy defined
in eq. (14).

10
Readings
1. K. Dill and S. Bromberg, Molecular Driving Forces: Statistical Thermodynamics in Biology,
Chemistry, Physics, and Nanoscience. (Taylor & Francis Group, New York, 2010).
2. W. W. Graessley, Polymeric Liquids and Networks: Structure and Properties. (Garland
Science, New York, 2004), Ch. 3.

Water and Aqueous Solutions
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 4/5/2018
3. Water’s Physical Properties
Water Structure
Water is a structured liquid. Its unique physical properties stem from its hydrogen bond network.
On average, each molecule can donate two hydrogen
bonds and accept two hydrogen bonds.
Strong hydrogen bond (HB) interactions give
preferential directionality along tetrahedral
orientation.
Large variation in HB distances and angles.
Structural correlations last about 1–2 solvent shells, or <1 nm.
Water HB probability densities

2
Water Dynamics
Hydrogen bond distances and angles fluctuate with 200 and 60 femtosecond time scales,
respectively.
Hydrogen bonded structures reorganize in a collective manner on picosecond time scales
(1–8 ps).
The water HB energy is tough to measure:
2–6 kcal mol−1 depending on the method used.
These are ∆H for reorganization, but we do not know how many HB broken or formed in
the process.
Reprinted with permission from I. Ohmine and S. Shinji, Acc. Chem. Res. 32, 741-749 (1999). Copyright 1999 American Chemical Society.

3
Electrical Properties of Pure Water
The motion of water’s dipoles guide almost everything that happens in the liquid. Two important
contributions:
1) Permanent dipole moment of molecule lies along symmetry axis.
2) Induced dipole moments (polarization) along the hydrogen bonds.
Strengthening hydrogen bond increases rOH and decreases ROO, which increases the dipole
moment. The dipole moment per molecule changes from 1.7 to 3.0 D going from gas phase
to liquid.
Water Dielectric Response
Pure water is a strong dielectric medium, meaning that long-range electrostatic forces acting
between two charges in water are dramatically reduced. The static dielectric constant is 80r ,
also known as the relative permittivity 0r . The dielectric response is strongly frequency
and temperature dependent. Motion of water charges encoded in complex dielectric constant ( )
or index of refraction ( n ).
Dielectric Constant
T(°C) εr
0 88
20 80.1
100 55.3
P. S. Ray, Appl. Opt. 11, 1836-1844 (1972).

4
Water Autoionization and pH
Protons and hydroxide govern acid base chemistry.
Any water molecule in the bulk lives about 10 hours before dissociating.
In a liter, a water molecule dissociates every 30 microseconds.
Protons in Water
Structure of H+ in water and the
extent to which the excess
charge is delocalized is still
unresolved. It is associated
strongly enough to describe as
covalently interacting, but its
time evolution is so rapid (<1
ps) that it is difficult to define a
structure.
Much higher mobility than
expected by diffusion of a
cation of similar size.
Explained by Grotthus
mechanism for transfer of
proton to neighboring water
molecules.
Ois also very mobile and
acts as a proton acceptor from
water.
KW = [H3O+][OH‒] =1.0×10
−14 (25° C)
Hydronium H3O+ Eigen H9O4+ Zundel: H5O2
+

5

Water and Aqueous Solutions
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 4/18/2018
4. Solvation Solvation describes the intermolecular interactions of a molecule or ion in solution with the
surrounding solvent, which for our purposes will refer to water. Aqueous solvation influences an
enormous range of problems in molecular biophysics, including (1) charge transfer and charge
stabilization; (2) chemical and enzymatic reactivity; (3) the hydrophobic effect; (4) solubility,
phase separation, and precipitation; (5) binding affinity; (6) self-assembly; and (7) transport
processes in water. The terms solute and solvent commonly apply to dilute mixtures in the liquid
phase in which the solute (minor component) is dispersed into the solvent (major component). For
this reason, the concept of solvation is also at times extended to refer to the influence of any
surrounding environment in which a biomolecule is embedded, for instance, a protein or
membrane.
There are numerous types of interactions and dynamical effects that play a role in solvation.
Typically, solute–solvent interactions are dominated by electrostatics (interactions of charges,
dipoles, and induced dipoles), as well as hydrogen bonding and repulsion (both of which have
electrostatic components). Therefore there is a tendency to think about solvation purely in terms
of these electrostatic interaction energies. A common perspective—polar solvation—emphasizes
how the dipoles of a polar liquid can realign themselves to energetically stabilize solute charges,
as illustrated here for the case of ion solvation in water. The extent of solute stabilization in the
liquid is the reorganization energy.
Unlike most solvents, the presence of water as a solvent for biological molecules fundamentally
changes their properties and behavior from the isolated molecule. This means that water influences
the conformation of flexible molecules, and sometimes hydrogen bonding interactions with water
can be strong enough that it is hard to discern where the boundary of solute ends and water begins.
But there is also a significant energetic cost to disrupting water’s hydrogen bonding network in
order to insert a solute into the liquid. Furthermore, the fluctuating hydrogen bond network of
water introduces a significant entropy to the system which can be competitive or even the dominant
contributor to the free energy of solvation. As a result, there are competing interactions involving
both solute and water that act to restructure the solute and solvent relative to their isolated
structures.

It is also important to remember that solvation is a highly dynamical process. Solvation dynamics
refers to the time-dependent correlated motions of solute and solvent. How does a solvent
reorganize in response to changes in solute charge distribution or structure? Conversely, how do
conformational changes to the intermolecular configuration of the solvent (i.e., flow) influence
changes in structure or charge distribution in the solute? The latter perspective views the solute as
“slaved” to the solvent dynamics. These coupled processes result in a wide variety of time-scales
in the solvation of biological macromolecules that span timescales from 10−14 to 10−7 seconds.

Solvation Thermodynamics
Let’s consider the thermodynamics of an aqueous solvation problem. This will help identify
various physical processes that occur in solvation, and identify limitations to this approach.
Solvation is described as the change in free energy to take the solute from a reference state,
commonly taken to be the isolated solute in vacuum, into dilute aqueous solution:
Solute(g) → Solute(aq)
Conceptually, it is helpful to break this process into two steps: (1) the energy required to open a
cavity in the liquid, and (2) the energy to put the solute into the cavity and turn on the interactions
between solute and solvent.
Each of these terms has enthalpic and entropic contributions:
sol 1 2
1 1 2 2
osol sol s l
G G G
H T S H T
H S
S
G T
1G : Free energy to open a cavity in water. We are breaking the strong cohesive
intermolecular interactions in water (ΔH1), creating a void against constant pressure,
and reducing the configurational entropy of the water hydrogen-bond network (ΔS1).
Therefore ΔG1 is large and positive. The hydrophobic effect is dominated by this term.
In atomistic models, cavities for biomolecules are commonly defined through the
solute’s solvent accessible surface area (SASA). In order to account for excluded
volume on the distance scale of a water molecule, the SASA can be obtained by rolling
a sphere with radius 1.4 Å over the solute’s van der Waals surface.

2G : Free energy to insert the solute into the cavity, turn on the interactions between solute
and solvent. Ion and polar solvation is usually dominated by this term. This includes
the favorable electrostatic and H-bond interactions (ΔH2). It also can include a
restructuring of the solute and/or solvent at their interface due to the new charges.
The simplest treatment of this process describes the solvent purely as a homogeneous
dielectric medium and the solute as a simple sphere or cavity embedded with point
charges or dipoles. It originated from the Born–Haber cycle first used to describe ΔHrxn
of gas-phase ions, and formed the basis for numerous continuum and cavity-in-
continuum approaches to solvation.
Given the large number of competing effects involving solute, solvent, and intermolecular
interactions, predicting the outcome of this process is complicated.
Looking at the cycle above illustrates many of the complications from this approach relevant to
molecular biophysics, even without worrying about atomistic details. From a practical point of
view, the two steps in this cycle can often have large magnitude but opposite sign, resulting in a
high level of uncertainty about ΔGsol—even its sign! More importantly, this simplified cycle
assumes that a clean boundary can be drawn between solute and solvent—the solvent accessible
surface area. It also assumes that the influence of the solvent is perturbative, in the sense that the
solvent does not influence the structure of the solute or that there is conformational disorder or
flexibility in the solute and/or solvent. However, even more detailed thermodynamic cycles can be
used to address some of these limitations:

1aG : Free energy to create a cavity in water for the final solvated molecule.
1bG : Free energy to induce the conformational change to the solute for the final solvated
state.
2G : Free energy to insert the solute into the cavity, turn on the interactions between solute
and solvent. This includes turning on electrostatic interactions and hydrogen bonding,
as well as allowing the solvent to reorganize around the solute:
2 solute–solvent solvent reorgG G G
Configurational entropy may matter for each step in this cycle, and can be calculated using1
lnB i ii
S k P P
Here sum is over microstate probabilities, which can be expressed in terms of the joint probability
of the solute with a given conformation and the probability of a given solvent configuration around
that solute structure. In step 1, one can average over the conformational entropy of the solvent for
the shape of the cavity (1a) and the conformation of the solute (1b). Step 2 includes solvent
configurational variation and the accompanying variation in interaction strength.
With a knowledge of solvation thermodynamics for different species, it becomes possible to
construct thermodynamic cycles for a variety of related solvation processes:
1) Solubility. The equilibrium between the molecule in its solid form and in solution is
quantified through the solubility product Ksp, which depends on the free energy change of
transferring between these phases.
1. See C. N. Nguyen, T. K. Young and M. K. Gilson, Grid inhomogeneous solvation theory: Hydration structure
and thermodynamics of the miniature receptor cucurbit[7]uril, J. Chem. Phys. 137 (4), 044101 (2012).

X(s) + H2O → X(aq) Ksp=[X(aq)]=exp[‒ΔGsp/kBT]
2) Transfer free energy. The most common empirical way of quantifying hydrophobicity is
to measure the partitioning of a solute between oil and water. The partitioning coefficient
P is related to the free energy needed to transfer a solute from the nonpolar solvent
(typically octanol) to water.
X(oil) → X(water) P = [X(oil)]/[X(aq)] =exp[‒ΔGtransfer/kBT]
3) Bimolecular association processes
Association/Dissociation 2X(aq) → X2(aq) Ka = [X2]/[X]2 Binding A(aq) + B(aq) → AB(aq) Ka = [AB]/[A][B]

Binding with conformational selection

Solvation Dynamics and Reorganization Energy
Some of the practical challenges of describing solvation through thermodynamic cycles include
dealing with strong solute–solvent interactions, flexible solutes, and explicit solvents.
Additionally, it does not reflect the fact that solvation is a highly dynamic process involving motion
of the solvent. Perhaps the most common example is in charge transfer processes (i.e., electrons
and protons) in which water’s dipoles can act to drive and stabilize the position of the charge. For
instance, consider the transfer of an electron from a donor to an acceptor in solution:
D A D A
We most commonly consider electron transfer as dependent on a solvent coordinate in which
solvent reorganizes its configuration so that dipoles or charges help to stabilize the extra negative
charge at the acceptor site. This type of collective coordinate is illustrated in the figure to the right.
These concepts are reflected in the Marcus’ theory of electron transfer. The free energy change to
relax the solvent configuration after switching the charges in the initial configuration is known as
the reorganization energy λ.

Water and Aqueous Solutions
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 4/29/2018
5. Hydrophobicity
Hydrophobic Solvation: Thermodynamics
Why do oil and water not mix? What is hydrophobicity? First, the term is a misnomer. Greasy
molecules that do not mix with water typically do have favorable interaction energies, i.e.,
∆Hint < 0. Walter Kauzmann first used the term “hydrophobic bonding” in 1954. This naming has
been controversial from the beginning, but it has stuck presumably, because in this case ΔG is
what determines the affinity of one substance for another rather than just ΔH. Generally speaking,
the entropy of mixing governs the observation that two weakly interacting liquids will
spontaneously mix. However, liquid water’s intermolecular interactions are strong enough that it
would prefer to hydrogen bond with itself than solvate nonpolar molecules. It will try to avoid
disrupting its hydrogen bond network if possible.
The hydrophobic effect refers to the free energy penalty that one pays to solvate a weakly
interacting solute. Referring to the thermodynamic cycle above, ∆Gsol, the reversible work needed
to solvate a hydrophobic molecule, is dominated by step 1, the process of forming a cavity in water.
The free energy of solvating a hydrophobic solute is large and positive, resulting from two factors:
1) ∆Ssol < 0. The entropy penalty of creating a cavity in water. We restrict the configurational
space available to the water within the cavity. This effect and the entropy of mixing (that
applies to any solvation problem) contribute to 1S .
2) ∆Hsol > 0. The energy penalty of breaking up the hydrogen bond network ( 1H ) is the
dominant contributor to the enthalpy. This can be estimated from a count of the net number
of H-bonds that needs to be broken to accommodate the solute: ∆Hsol increases by 1–3 kcal
mol−1 of hydrogen bonds. The interaction energy between a hydrocarbon and water (ΔH2)
is weakly favorable as a result of dispersion interactions, but this is a smaller effect. (At
close contact, van der Waals forces lower the energy by ~0.1-1.0 kcal mol−1). Therefore
sol 1H H .
The net result is that ΔGsol is large and positive, which is expected since water and oil do not mix.
These ideas were originally deduced from classical thermodynamics, and put forth by Frank and
Evans (1945) in the “iceberg model”, which suggested that water would always seek to fulfill as
many hydrogen bonds as it could—wrapping the network around the solute. This is another
misnomer, because the hydrophobic effect is a boundary problem about reducing configurational
space, not actual freezing of fluctuations. Hydrogen bonds continue to break and reform in the
liquid, but there is considerable excluded configurational space for this to occur. Let’s think of this
as solute-induced hydrogen-bond network reorganization.

2
Water Configurational Entropy
Let’s make an estimate of ∆Ssol. Qualitatively, we are talking about limiting the configurational
space that water molecules can adopt within the constraints of a tetrahedral potential.
Approximation
Bulk water: 4 HBs/tetrahedron Within a tetrahedral lattice the orientation of an H2O has:
6 configurations: 1,2 1,3 1,4 2,3 2,4 3,4
Ωbulk = 6
At a planar interface, you satisfy the most hydrogen bonds by making one
dangling hydrogen bond pointing toward the surface
So an estimate for the entropy of hydrophobic solvation if these configurations are equally
probable is sol surf bulkln( ) ln 2BS k k per hydrogen bond of lost configurational space:
sol ln 2BT S k T
Evaluating at 300 K,
sol 1.7 kJ/mol water molecules @ 300 K
0.4 kcal/mol water molecules
T S
This value is less than the typical enthalpy for hydrogen bond formation, which is another way of
saying that the hydrogen bonds like to stay mostly intact, but have large amplitude fluctuations.
Temperature Dependence of Hydrophobic Solvation
From ∆Ssol we expect ∆Gsol to rise with temperature as a result of the entropic term. This is a classic
signature of the hydrophobic effect: The force driving condensation or phase-separation increases
with temperature. Since the hydrogen-bond strength connectivity and fluctuations in water’s
hydrogen-bond network change with temperature, the weighting of enthalpic and entropic factors
in hydrophobic solvation also varies with T. Consider a typical temperature dependence of ΔGsol
for small hydrophobic molecules:
3 configurations 1,2 1,3 1,4 Ωsurface = 3

3
The enthalpic and entropic contributions are two strongly temperature-dependent effects, which
compete to result in a much more weakly temperature-dependent free energy. Note, this is quite
different from the temperature dependence of chemical equilibria described by the van’t Hoff
equation, which assumes that ΔH is independent of temperature. The temperature dependence of
all of these variables can be described in terms of a large positive heat capacity.
0 0sol sol
,sol
2 0sol2
p
H SC T
T T
GT
T
At low temperatures, with a stronger, more rigid hydrogen-bond network, the S term dominates.
But at high temperature, approaching boiling, the entropic penalty is far less.
Entropically dominated (HB fluctuations)
0
T
T S
Hydrophobic solvation energy
(Curvature of ΔG0)
G H
Enthalpically dominated: Already have configurational freedomPenalty for breaking hydrogen bonds

4
Hydrophobic Solvation: Solute Size Effect
To create a new interface there are enthalpic and entropic penalties. The influence of each of these
factors depends on the size of the solute (R) relative to the scale of hydrogen bonding structure in
the liquid (correlation length, , ~0.5–1.0 nm).
For small solutes (R < ): Network deformation
The solute can insert itself into the hydrogen bond network without breaking hydrogen bonds. It
may strain the HBs (∆H > 0) and reduce the configurational entropy (∆S < 0), but the liquid mostly
maintains hydrogen bonds intact. We expect the free energy of this process to scale as volume of
the solute ∆Gsol(R < ) R3.
For large solutes, R > : Creating an interface
The hydrogen bond network can no longer maintain all of its HBs between water molecules. The
low energy state involves dangling hydrogen bonds at the surface. One in three surface water
molecules has a dangling hydrogen bond, i.e., on average five of six hydrogen bonds of the bulk
are maintained at the interface.
We expect ∆Gsol to scale as the surface area ∆Gsol(R > ) R2. Of course, large solutes also have
a large volume displacement term. Since the system will always seek to minimize the free energy,
there will be a point at which the R3 term grows faster with solute radius than the R2 term, so large
solutes are dominated by the surface term.

5
Calculating ΔG for Forming a Cavity in Water
Let’s investigate the energy required to form cavities in water using a purely thermodynamic
approach. To put a large cavity (R > ) into water, we are creating a new liquid–vapor interface for
the cavity. So we can calculate the energy to create a cavity using the surface tension of water.
Thermodynamically, the surface tension γ is the energy required to deform a liquid–vapor
interface: , ,N V TU a , where a is the surface area. So we can write the change in energy as
a result of inserting a spherical cavity into water as the product of the surface tension of water
times the surface area of the cavity,
2 4U R R
In principle, the experimentally determined γ should include entropic and enthalpic contributions
to altering the hydrogen bond network at a surface, so we associate this with ΔGsol. For water at
300 K, = 72 pN/nm. γ varies from 75 pN/nm at 0 °C to 60 pN/nm at 100 °C.
The surface tension can also be considered a surface energy per unit area: which can also be
considered a surface energy, i.e., γ = 72 mJ/m2. To relate this to a molecular scale quantity, we can
estimate the surface area per water molecule in a spherical cavity. The molecular volume of bulk
water deduced from its density is 3.0×10−26 L/molecule, and the corresponding surface area per
molecule deduced from geometric arguments is ~10 Å2. This area allows us to express γ ≈ 4.3
kJ/mol, which is on the order of the strength of hydrogen bonds in water.
For small cavities (R<), the considerations are different since we are not breaking hydrogen
bonds. Here we are just constraining the configurational space of the cavity and interface, which
should scale as volume. We define
3
sol
4
3 E
RG R
where E is an energy density.1
E ≈ 240 10–9 pJ/nm3 = 240 pN nm−2
Remembering that ,/ |N TG V p , the energy density corresponds to units of pressure with a
value E = 2.4103 atm. If we divide E by the molarity of water (55M), then we find it can be
expressed as 4.4 kJ/mol, similar to the surface free energy value deduced.
So combining the surface and volume terms we write
1. D. Chandler, Interfaces and the driving force of hydrophobic assembly, Nature 437, 640–647 (2005).

6
2 3sol
4( ) 4
3 EG R R R
Alternatively, we can define an effective length scale (radius) for the scaling of this interaction
1/32 3
solsurf
surf
3
4 4
B BV
VB E
R RG k T k TR R
R Rk T
where Rsurf = 0.067 nm and RV = 1.6 nm at 300 K. We can assess the crossover from volume-
dominated to area-dominated hydrophobic solvation effects by setting these terms equal and
finding that this occurs when R = 3γ/ E = 0.9 nm. The figure below illustrates this behavior and
compares it with results of MD simulations of a sphere in water.
An alternate approach to describing the molar free energy of solvation for a hydrophobic sphere
of radius r equates it with the probability of finding a cavity of radius r:
2
( )
( )
0
2 2surf
surf
ln ( )
4exp
( )1
2 4
2exp
B
B
B
U r k TB
U r k TB
G k T P r
r
k TeP r
k Te dr
r RR
This leads to an expression much like we previously described for large cavities. It is instructive
to determine for water @ 300 K:
Reprinted by permission from Macmillan Publishers Ltd: D. Chandler, Nature 437, 640–647 (2005). Copyright 2005.

7
1/2
1/2sur0
1( ) 0.038 nm
2B
f
k Tdr r P r Rr
This is very small, but agrees well with simulations. (There is not much free volume in water!)
However, when you repeat this to find the variance in the size of the cavities δr = (⟨r2⟩ ⟨r⟩2)1/2,
we find r = 0.028 nm. So the fluctuations in size are of the same scale as the average and therefore
quite large in a relative sense, but still less than the size of a water molecule.
Simulations give the equilibrium distribution of cavities in water
Δμ0 = ‒kBT ln(P)
Reprinted with permission from N. T. Southall, K. A. Dill and A. D. J. Haymet, J. Phys. Chem. B 106, 521–533 (2002). Copyright 2002 American Chemical Society.

8
Hydrophobic Collapse2
We see that hydrophobic particles in water will attempt to minimize their surface area with water
by aggregating or phase separating. This process, known as hydrophobic collapse, is considered
to be the dominant effect driving the folding of globular proteins.
Let’s calculate the free energy change for two oil droplets coalescing into one. The smaller droplets
both have a radius R0 and the final droplet a radius of R.
collapse sol sol 0( ) 2 ( )G G R G R
The total volume of oil is constant—only the surface area changes. If the total initial surface area
is A0, and the final total surface area is A, then
collapse 0( ) G A A
which is always negative since 0A A and γ is positive.
Initial State Final State
30
20 0
020
4Total Volume 2
3
Initial surface area 2 4
24
V R
A R
A
R
3 1/30
2 1/3 2 2 20 0
20
42
3
4 4 (2 ) 4 (1.59)
1.594
V R R R
A R R R
A
R
2collapse 0 0( ) 0.41 4 G A A R
This neglects the change in translational entropy due to two drops coalescing into one. Considering
only the translational degrees of freedom of the drops, this should be approximately ΔScollapse kB
ln(3/6). In other words, a small number compared to the surface term.
2. See K. Dill and S. Bromberg, Molecular Driving Forces: Statistical Thermodynamics in Biology, Chemistry,
Physics, and Nanoscience. (Taylor & Francis Group, New York, 2010), p. 675.

9
We can readily generalize this to a chain of n beads, each of radius R0, which collapse toward a
single sphere with the same total volume. In this case, let’s consider how the free energy of the
system varies with the number of beads that have coalesced.
Again the total volume is constant, 3403
V n R , and the surface area changes. The initial surface
area is 20 04A Rm and the final surface area is 2 2
0/3 2
min( )4 4 min mRA R . Along the path,
there is a drop of total surface area for each bead that coalesces. Let’s consider one path, in which
an individual bead coalesces with one growing drop. The total surface area once n of m particles
have coalesced is
An = (surface area of drop formed by n coalesced beads) + (total area of remaining m‒n beads)
2/3
2/3
2 20 0
20
20 0
2/3
4 4
4
4
n n
n
A R m n R
m n R
A n Rn
The free energy change for coalescing n beads is
coll 0
2/3 204
nG A A
n n R
This free energy is plotted as a function of the bead number at fixed volume. This is an energy
landscape that illustrates that the downhill direction of spontaneous change leads to a smaller
Initial total surface area A0 Final surface area Aminsurface area An

10
(nm)
min = 1.96
number of beads. The driving force for the collapse of this chain can be considered to be the
decrease in free energy as a function of the number of beads in the chain:
coll coll coll
G G
fr n
2 1/3coll 0
24 1
3
GR n
n
This is not a real force expressed in Newtons, but we can think of it as a pseudo-force, with the
bead number acting as a proxy for the chain extension. If you want to extend a hydrophobic chain,
you must do work against this. Written in terms of the extension of the chain x (not the drop area
A)
0 0
x xcoll n
extx xn
G Aw f dx dx
A x
Here we still have to figure out the relationship between extension and surface area, nA x .
Alternatively, we can think of the collapse coordinate as the number of coalesced beads, n.
Hydrophobic Collapse and Shape Fluctuations
An alternate approach to thinking about this problem is in terms
of the collapse of a prolate ellipsoid to a sphere as is seeks to
minimize its surface area. We take the ellipsoid to have a long
radius /2 and a short radius r. The area and volume are then:
22 1
2
2
2
22 cos
4 tan
2(constant)
3
3 / 2
3
2 tan
rA r
V r
r V
VA
Let’s plot the free energy of this ellipsoid as a function of . For V = 4 nm3, kBT=4.1 pN nm we
find min=1.96 nm. Note that at kBT the dimensions of the ellipsoid can fluctuate over many ~5 Å.

11
Readings
1. N. T. Southall, K. A. Dill and A. D. J. Haymet, A view of the hydrophobic effect, J. Phys.
Chem. B 106, 521–533 (2002).
2. D. Chandler, Interfaces and the driving force of hydrophobic assembly, Nature 437, 640–647
(2005).
3. G. Hummer, S. Garde, A. E. García, M. E. Paulaitis and L. R. Pratt, Hydrophobic effects on a
molecular scale, J. Phys. Chem. B 102, 10469–10482 (1998).
4. B. J. Berne, J. D. Weeks and R. Zhou, Dewetting and hydrophobic interaction in physical and
biological systems, Annu. Rev. Phys. Chem. 60, 85–103 (2009).

Water and Aqueous Solutions
Andrei Tokmakoff, Concepts in Biophysical Chemistry, April 15, 2018
6. Electrical Properties of Water and Aqueous Solutions
We want to understand the energy and electrical properties and transport of ions and charged
molecules in water. These are strong forces. Consider an example of NaCl dissociation in gas
phase dissociation energy ∆Hionization ≈ 270 kJ/mol:
89ionization
[Na ][Cl ]gas 10
[NaCl]K
In solution, this process [NaCl(aq) → Na+(aq)+Cl‒(aq)] occurs spontaneously; the solubility
product for NaCl is Ksp = [Na+(aq)][Cl‒(aq)]/[NaCl(aq)] = 37. Similarly, water molecules are
covalently bonded hydrogen and oxygen atoms, but we know that the internal forces in water can
autoionize a water molecule:
75ionization gas [H ][OH ] 10K and 14
2H O [H ][OH ] 10WK
These tremendous differences originate in the huge collective electrostatic forces that are present
in water. “Polar solvation” refers to the manner in which
water dipoles stabilize charges.
These dipoles are simplifications of the rearrangements of
water’s structure to accommodate and lower the energy of
the ion. It is important to remember that water is a
polarizable medium in which hydrogen bonding
dramatically modifies the electrostatic properties.

2
Electrostatics
Let’s review a number of results from classical electrostatics. The
interactions between charged objects can be formulated using
force, the electric field, or the electrostatic potential. The
potential is our primary consideration when discussing free
energies in thermodynamics and the Hamiltonian in statistical
mechanics. Let’s describe these, consider the interaction between
two ions A and B, separated by a distance rAB, with charges qA
and qB.
Force and Work
Coulomb’s Law gives the force that B exerts on A.
2
1ˆ
4A B
AB ABAB
q qr
r f
ABr is a unit vector pointing from Br to Ar . A useful identity to remember for calculations is
22
0
2304
e
pN nm
For thermodynamic purposes it is helpful to calculate the reversible work for a process. Electrical
work comes from moving charges against a force
dw d rf
As long as q and are independent of r, and the process is reversible, then work only depends on
r, and is independent of path. To move particle B from point 1 at a separation r0 to point 2 at a
separation r requires the following work
1 22 1
1 11
4 A Bw q qr r
and if the path returns to the initial position, wrev = 0.
Field, E
The electric field is a vector quantity that describes the action of charges at a point in space. The
field from charged particle B at point A is
2
1ˆ( )
4B
AB A ABAB
qr
r E r
EAB is related to the force that particle B exerts on a charged test particle A with charge qA through

3
( )A A AB Aq E rf
While the force at point a depends on the sign and magnitude of the test charge, the field does not.
More generally, the field exerted by multiple charged particles at point rA is the vector sum of the
field from multiple charges (i):
2
1ˆ( ) ( )
4i
A Ai A Aii i Ai
qr
r E r E r
where | |Ai A ir r r and the unit vector ˆ ( ) /Ai A i Air r r r . Alternatively for
a continuum charge density ρq(r),
3
1 ( )( ) ( )
4 | |
A
A qA
dr r
E r r rr r
where the integral is over a volume.
Electrostatic Potential, Φ
For thermodynamics and statistical mechanics, we wish to express electrical interactions in terms
of an energy or electrostatic potential. While the force and field are vector quantities, the
electrostatic potential Φ is a scalar quantity which is related to the electric field through
E
It has units of energy per unit charge. The electrostatic potential at point
rA, which results from a point charge at rB, is
1( )
4B
AAB
qr
r (1)
The electric potential is additive in the contribution from multiple charges:
1( )
4i
Ai Ai
qr
r or
( )1( )
4 | |q
AA
r d
r
rr r
The electrostatic energy of a particle A as a result of the potential due to particle B is
1( ) ( )
4 A B
AB A A AAB
q qU r q r
r
Note that 12( ) ( ) ( ( ) ( ))AB A A B B A A B BU q r q r q r q r , so we can generalize this to calculate
the potential energy stored in a collection of multiple charges as
1( )
2
1( ) ( )
2
i Aii
A A q A A
U q r
dr r r

4
Dielectric Constant and Screening
Charge interactions are suppressed in a polarizable medium, which depends on the dielectric
constant. The potential energy for interacting charges is long range, scaling as r−1.
1( )
4A Bq q
U rr
You can think of ε as scaling the potential interaction distance 1( )U r . Here we equate the
dielectric constant and the relative permittivity 0r , which is a unitless quantity equal to the
ratio of the sample permittivity to the vacuum permittivity 0 .
The dielectric constant is used to treat the molecular structure and dynamics of the charge
environment in a mean sense, to give you a sense of how the polarizable medium screens the
interaction of charges. Making use of a dielectric constant implies a separation of the charges of
the system into a few important charges and the environment, which encompassed countless
countess charges and their associated degrees of freedom.
Two treatments of the electrostatic force that charge b exerts on charge a in a dense medium:
Continuum
20
1
4a b
Ar
q qf
r
Explicit Charges
2 2
10
2
2 210
1
4
11
4
Na b a i
Ai ai
Na b i
i b ai
q q q qf
r r
q q q r
r q r
i: charged particles of the environment

5
Free Energy of Ions in Solution
Returning to our continuum model of the solvation free energy, and apply this to solvating an ion.
As discussed earlier, ΔGsol will require forming a small cavity in water and turning on the
interactions between the ion and water. We can calculate the energy for solvating an ion in a
dielectric medium as the reversible work needed to charge the ion from a charge of 0 to its final
value q within the dielectric medium:
0
q
ionw dq (1)
As we grow the charge, it will induce a response from the dielectric medium (a polarization) that
scales with electrostatic potential: / 4q r . We take the ion to occupy a spherical cavity with
radius a. Although we can place a point charge at the center of the sphere, it is more easily solved
assuming that the charge q is uniformly distributed over the surface of the sphere. Then the
electrostatic potential at the surface of the sphere is / 4q a and the resulting work is
2
8
qw
b
In a similar manner, we can calculate the energy it takes to transfer an ion from one medium with
ε1 to another with ε2. We first discharge the ion in medium 1, transfer, and recharge the ion in
medium 2. The resulting work, the Born transfer energy, is
2
2 1
1 1
8
qw
a
If you choose to distribute the charge uniformly through the spherical cavity, the prefactor q2/8πa
becomes 3q2/20πa.

6
Ion Distributions in Electrolyte Solution
To gain some insight into how ions in aqueous solution at physiological temperatures behave, we
begin with the thermodynamics of homogeneous ionic solutions. Let’s describe the distribution of
ions relative to one another as a function of the concentration and charge of the ions. The free
energy for an open system containing charged particles can be written
comp charges
1 1
( )N N
j j ij i
dG SdT Vdp µ dN x dq
(2)
μj and Nj are the chemical potential and the number of solutes of type j, in which the solute may or
may not be charged and where the contribution of electrostatics is not included. This term primarily
reflects the entropy of mixing in electrolyte solutions. The sum i only over charges qi, under the
influence of a spatially varying electrostatic potential. This reflects the enthalpic contribution to
the free energy from ionic interactions.
In our case, we will assume that ions are the only solutes present, so that the sum over i and j are
the same and this extends over all cations and anions in solution. We can relate the charge and
number density through
qi = zi e Ni
where z is the valency of the ion (±1,2,…) and e is the fundamental unit of charge. Then expressing
dqi in terms of dNi, we can write the free energy under constant temperature and pressure
conditions as
, i i i i iT pi i
dG µ z e dN µ dN
Here iµ is known as the electrochemical potential.
To address the concentration dependence of the electrochemical potential, we remember that
lni i B iµ µ k T C
where Ci is the concentration of species i referenced to standard state, 1MC . (Technically ionic
solutions are not ideal and Ci is more accurately written as an activity.) Equivalently we can relate
concentration to the number density of species i relative to standard state. Then the electrochemical
potential of species i is
( ) ln ( ) ( ) i i B i iµ x µ k T C x z e x (3)
Here we write C(x) to emphasize that there may be a spatial concentration profile. At equilibrium,
the chemical potential must be the same at all points in space. Therefore, we equate the
electrochemical potential at two points:

7
2 1( ) ( )µ x µ x
So from eq. (3)
2
1
( )ln
( )
B
C x ze
C kx T (4)
where the potential difference is
2 1( ) ( ) x x .
Equation (4) is one version of the Nernst Equation, which describes the interplay of the
temperature-dependent entropy of mixing the ions and their electrostatic interactions. Rewriting it
to describe ΔΦ as a function of concentration is sometimes used to calculate the transmembrane
potential as a function of ion concentrations on either side of the membrane.
The Nernst equation predicts Boltzmann statistics for the spatial distribution of charged species,
i.e., that concentration gradients around charged objects drop away exponentially in space with in
the interaction energy
( )0
( )
( ) )
(
BU x k T
zU x
C x C x
e x
e (5)
This principle will hold whether we are discussing the ion concentration profile around a
macroscopic object, like a charged plate, or for the average concentration profiles about a single
ion. At short distances, oppositely charged particles will have their concentrations enhanced,
whereas equally charged objects will be depleted. At short range, the system is dominated by the
electrostatic interaction between charges, whereas at long distance, the entropy of mixing
dominates.
For the case of charged plates:

8
Bjerrum Length, B The distance at which electrostatic interaction energy between two charges equals kBT.
For ±1 charges 21
4BB
e
k T
At T = 300 K, / 25B ek T mV and
For: r = 1 B = 560 Å
r = 80 B = 7.0 Å
For > B Electrostatic interactions are largely screened, and motion is primarily
Brownian
For < B Attractive and repulsive forces dominate. The Bjerrum length gives ion
pairing threshold. For B = 7.0Å, the ion concentrations are approximately, 26 36.9 10 m or ~1 M.

9
Poisson–Boltzmann Equation1
The Poisson–Boltzmann Equation (PBE) is used to evaluate charge distributions for ions around
charged surfaces. It brings together the description of the electrostatic potential around a charged
surface with the Boltzmann statistics for the thermal ion distribution. Gauss’ equation relates the
flux of electric field lines through a closed surface to the charge density within the volume:
/E . The Poisson equation can be obtained by expressing this in terms of the
electrostatic potential using E
2
(6)
Here ρ is the bulk charge density for a continuous medium.
We seek to describe the charge distribution of ions about charged surfaces of arbitrary geometry.
The surface will be described by a surface charge density σ. We will determine (r), which is
proportional to the number density or concentration of ions
( ) ( )i ii
r z eC r (7)
where the sum is over all ionic species in the solution, and zi is the ion valency, which may take
on positive or negative integer values. Drawing from the Nernst equation, we propose an ion
concentration distribution of the Boltzmann form
( )0,( ) i Bz e r k T
i iC r C e (8)
Here we have defined the bulk ion concentration as 0 ( )C C r , since Φ → 0 as r → ∞. Note
that the ionic composition is taken to obey the net charge neutrality condition
0, 0i iiz C (9)
The expressions above lead to the general form of the PBE:
20, exp[ ]i i i B
i
ez C z e k T
(10)
This is a nonlinear differential equation for the electrostatic potential and can be solved for the
charge distribution of ions in solution for various boundary conditions. This can explain the ion
distributions in aqueous solution about a charged structure. For instance:
1. M. Daune, Molecular Biophysics: Structures in Motion. (Oxford University Press, New York, 1999); M. B.
Jackson, Molecular and Cellular Biophysics. (Cambridge University Press, Cambridge, 2006).

10
Surface (membrane) 2
/0,2
i Bz e x k Ti i
i
ez C e
x
Sphere (protein) /20,2
1i Bz e r k T
i ii
er z C e
r r r
Cylinder (DNA) 2
, /0,2
1i Bz e r z k T
i ii
er z C e
r r r z
These expressions only vary in the form of the Laplacian 2 . They are solved by considering
two boundary conditions: (1) Φ(∞) = 0 and (2) the surface charge density σ/ϵ = ‒Φ. We will
examine the resulting ion distributions below.
In computational studies, the interactions of a solute with water and electrolyte solutions are
often treated with “implicit solvent”, a continuum approximation. Solving the PBE is one
approach to calculating the effect of implicit solvent. The electrostatic free energy is calculated
from 1elec 2 i ii
G ez and the electrostatic potential is determined from the PBE.
As a specific case of the PBE, let’s consider the example of a symmetric electrolyte, obtained
from dissolving a salt that has positive and negative ions with equal valence –z z z ,
resulting in equal concentration of the cations and anions 0, 0,– 0 C C C , as for instance
when dissolving NaCl. Equation (7) is used to describe the interactions of ions with the same
charge (co-ions) versus the interaction of ions with opposite charge (counterions). For
counterions, z and Φ have opposite signs and the ion concentration should increase locally over
the bulk concentration. For co-ions, z and Φ have the same sign and we expect a lowering of the
local concentration over bulk. Therefore, we expect the charge distribution to take a form
/ /0
02 sinh
B Bze k T ze k T
B
zeC e e
zezeC
k T
(11)
Remember: 2sinh – x xx e e . Then substituting into eq. (6), we arrive at a common form of
the PBE2
02 2sinh
BTC z ez e
k
(12)
2. Alternate forms in one dimension:
2
0 02 2
412sinh sinh sinhB B
BB D B B
k T k Te e e eC C
x k T e k T e k T

11
Debye–Hückel Theory
Since it is nonlinear, it is not easy to solve the PBE, but for certain types of problems, we can
make approximations to help. The Debye–Hückel approximation holds for small electrostatic
potential or high temperature conditions such that
1B
ze
k T
This is the regime in which the entropy of mixing dominates the electrostatic interactions
between ions. In this limit, we can expand the exponential in eq. (10) as
exp[ ] 1 / BB ze k Tze k T . The leading term in the resulting sum drops because of the
charge neutrality condition, eq. (9). Keeping the second term in the expansion leads to
2 2 (13)
where 2
2 2
B
eI
k T
and the ionic strength, I, is defined as
20,
12 i i
i
I C z
Looking at eq. (13), we see that the Debye–Hückel approximation linearizes the PBE. It is
known as the Debye–Hückel equation, or the linearized PBE. For the case of the 1:1 electrolyte
solution described by eq. , we again obtain eq. (13) using sinh( )x x as x , with
2 2
2 200
28 B
B
z e Cz C
k T
The constant κ has units of inverse distance, and it’s inverse is known as the Debye length λD =
κ–1. The Debye length sets the distance scale over which the electrostatic potential decays, i.e.,
the distance over which charges are screened from one another. For the symmetric electrolytes
12 2
02B
D
k T
z e C
(14)
As an example: 1:1 electrolytes in H2O: = 80; z+ = ‒z– = 1 ; T = 300 K leads to
C0 = 100 mM D = 9.6 Å C0 = 10 mM D = 30.4 Å
01/2( ) 3.04 [ ( )]D C MÅ

12
The Debye approximation holds for small
electrostatic potentials relative to kBT (r > D). For
instance, it’s ok for ion distribution about large
protein or vesicle but not for water in a binding
pocket.
Reprinted from P. Ghosh http://nptel.ac.in/courses/103103033/module3/ lecture3.pdf.

13
Ion Distributions Near a Charged Interface
Debye–Hückel Approximation
Describing ions near a negatively charged plane is a way of describing the diffuse layer of
cations that forms near the negatively charge interface in lipid bilayers. The simplest approach is
to use the Debye–Hückel equation (linearized PBE) in one dimension. x is the distance away
from the infinite charged plane with a surface charge density of σ = q/a.
2
2 2
( ) 1( )
D
xx
x
Generally, the solution is
1 2( ) D Dx xx a e a e (15)
Apply boundary conditions:
1) 2lim ( ) 0 0x
x a
2) The electric field for surface with charge density σ (from Gauss’ theorem)
surface
Ex
(16)
Differentiate eq. (15) and compare with eq. (16):
1Da
The electrostatic potential decays exponentially away from the surface toward zero.
(x)= DxD e
Nominally, the prefactor would be the “surface potential” at x = 0, but the Debye approximation
would significantly underestimate this, as we will see later. Substituting Φ into the Poisson
equation gives
( ) Dx
D
x e
(17)
Ion distribution density in solution decays exponentially with distance. This description is valid
for weak potentials, or x > λD. The potential and charge density are proportional as 2( ) ( ) /Dx x ; both decay exponentially on the scale of the Debye length at long range.
Note: Higher ion concentration → smaller λD → Double layer less diffuse.
Higher temperature → larger λD → Double layer more diffuse.

14
Note also that the surface charge is balanced by ion distribution in solution:
0
( )x dx
(18)
which you can confirm by substituting eq. (17).
Gouy–Chapman Model3
To properly describe the ion behavior for shorter distances (x < λD), one does not need to make
the weak-potential approximation and can retain the nonlinear form of the Poisson–Boltzmann
equation:
20
2
2surf
( ) 2sinh
4 B B
ze xx zeC
x kT
k TE
ex
In fact, this form does have an analytical solution. It is helpful to define a dimensionless reduced
electrostatic potential, expressed in thermal electric units:
B
e
k T
and a reduced distance which is scaled by the Debye length
/ Dx x
Then the PBE for a 1:1 electrolyte takes on a simple form
2 ( ) sinh ( )x x
with the solution:
12ln
1
x
x
gex
ge
Here g is a constant, which we can relate to the surface potential, by setting x to zero.
3. H. H. Girault, Analytical and Physical Electrochemistry. (CRC Press, New York, 2004).; M. B. Jackson,
Molecular and Cellular Biophysics. (Cambridge University Press, Cambridge, 2006), Ch. 11.; M. Daune, Molecular Biophysics: Structures in Motion. (Oxford University Press, New York, 1999), Ch. 18.; S. McLaughlin, The electrostatic properties of membranes, Annu. Rev. Biophys. Biophys. Chem. 18, 113-136 (1989).

15
1exp (0) / 2 tanh(ln( ) / 2)
1
gg
g
(0)
is the scaled surface potential. Using the surface charge density σ we can find:
2
0 01D D
x xg
with 0 2 B
ex
Then you can get the ion distribution from Poisson equation: 2( ) ( )x x .
The Gouy–Chapman Layer, which is x < λD, has strong enough ionic interactions that you will
see an enhancement over Debye–Hückel.
Stern Layer
In immediate proximity to a strongly charged surface, one can form a direct contacts layer of
counterions on surface: the Stern layer.
The Stern Layer governs the slip plane for diffusion of charged particles. The zeta potential ζ is
the potential energy difference between the Stern layer and the electroneutral region of the
sample, and governs the electrophoretic mobility of particles. It is calculated from the work
required to bring a charge from x = ∞ to the surface of the Stern layer.
λD → ∞
0
2ln 1Bk T x
e x

16
Ion Distributions Near a Charged Sphere4
Now let’s look at how ions will distribute themselves around a
charged sphere. This sphere could be a protein or another ion. We
assume a spherically symmetric charge distribution about ions, and a
Boltzmann distribution for the charge distribution for the ions (i)
about the sphere (j) of the form
0
,( ) i j Bk T
i i
e
i
z rr ez C e (19)
( )j r is the electrostatic potential at radius r which results from a point charge zje at the center
of the sphere. Additionally, we assume that the sphere is a hard wall, and define a radius of
closest approach by ions in solution, b. The PBE becomes
( )20,2
1 1i Bz e r k T
i ii
d dez C er
r dr dr
To simplify this, we again apply the Debye–Hückel approximation Bze k T , expand the
exponential in eq. , drop the leading term due to the charge neutrality condition, and obtain
2 20,( ) ( ) /i ji B
i
r C z e r k T (20)
Then the linearized PBE is in the Debye–Hückel approximation is
222
1 d dr
r dr dr
(21)
As before: 2 2 22 /D Be I k T . Solutions to eq. (21) will take the form:
1 2
r re eA A
r r
(22)
To solve this use boundary conditions:
1) A2 = 0, since Φ → 0 at r = ∞.
2) The field at the surface of a sphere with charge zje and radius b is determined from
24 ( ) jz eb E b
(23)
4. See M. Daune, Molecular Biophysics: Structures in Motion. (Oxford University Press, New York, 1999), Ch.
16.; D. A. McQuarrie, Statistical Mechanics. (Harper & Row, New York, 1976), Ch. 15.; Y. Marcus, Ionic radii in aqueous solutions, Chem. Rev. 88 (8), 1475-1498 (1988).

17
Now, using ( )r b
dE b
dr
(24)
Substitute eq. (22) into RHS and eq. (23) into LHS of eq. (24). Solve for A1.
1
e
4 (1 )
bjz e
Ab
So, the electrostatic potential for r ≥ b is
( )
0
vacuum
( )4 (1 )
r bj
r
z e er
r b
(25)
Setting r = b gives us the surface potential of the sphere:
( )4 (1 )
jz eb
b b
Note the exponential factor in eq. (25) says that Φ drops faster than r‒1 as a result of screening.
Now substitute eq. (25) into eq. (20) we obtain the charge probability density
2 ( )
( )4 1
r bjz e e
rr b
(26)
We see that the charge density about ion drops as ( )r be r , a rapidly decaying function that
emphasizes the strong tendency for ions to attract or repel at short range. However, the charge
density between r and r+dr is 4πr2(r) and therefore grows linearly with r before decaying
exponentially: r e‒κ(r–b). We plot this function to illustrate the thickness of the “ion cloud” around
the sphere, which is peaked at r = λD. Additionally, note, that the charge distribution around that
ion is equal and opposite to the charge of the sphere “j”.
2( )4 jbr r dr z e

18
It is also possible to calculate radial distribution functions for ions in the Debye–Hückel limit.5
The radial pair distribution function for ions of type i and j, gij(r), is related to the potential of
mean force Wij as
( x( p) )e /ij ij Bg W Tr r k (27)
If only considering electrostatic effects, we can approximate Wij as the interaction energy
( ) ( )ij i jU r z e r . Using the Debye–Hückel result, eq. (25),
2 ( )
( )4 (1 )
r bi j
ij
z z e eU r
b r
Let’s look at the form of g(r) for two singly charged ions with λD = 0.7 nm, ϵ = 80, and T = 300
K. The Bjerrum length is calculated as B = e2/4πϵkBT = 0.7 nm. Since the Debye–Hückel holds
for Bze k T , we can expand the exponential in eq. as
21( ) 1
2ij ij ijg r
where we define ( )ij ij BU r k T ( ) 1 1(1 )r bBe r b . The resulting radial distribution
function for co- and counterions calculated for b = 0.15 nm are shown below.
5. See D. A. McQuarrie, Statistical Mechanics. (Harper & Row, New York, 1976), Ch. 15.

19
Readings
1. M. Daune, Molecular Biophysics: Structures in Motion. (Oxford University Press, New
York, 1999), Ch. 16, 18.
2. D. A. McQuarrie, Statistical Mechanics. (Harper & Row, New York, 1976), Ch. 15.

Macromolecules
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 07/21/2018
7. Statistical Description of Macromolecular Structure
There are a number of ways in which macromolecular structure is described in biophysics, which
vary in type of information they are trying to convey. Consider these two perspectives on
macromolecular structure that represent opposing limits: atomistic vs. statistical.
1) Atomistic: Use of atoms, small molecules, or functional groups as building blocks for
biomolecular structure. This perspective is rooted in the dominant methods used for
studying macromolecular structure (90% X-ray crystallography; 10% NMR). It has the
most value for describing detailed Ångstrom to nanometer scale interactions of a
chemical nature, but also tends to reinforce a unique and rigid view of structure, even
though this cannot be the case at physiological temperatures.
The atomistic perspective is inherent to molecular force fields used in computational
biophysics, which allow us to explore time-dependent processes and molecular disorder.
Even within the atomistic representation, there are many complementary ways of
representing macromolecular structure. Below are several representations of myoglobin
structure, each is used to emphasize specific physical characteristics of the protein.
2) Statistical/physical: More applicable for disordered or flexible macromolecules.
Emphasis is on a statistical description of molecules that can have multiple
configurations. Often the atomic/molecular structure is completely left out. These tools
have particular value for describing configurational entropy and excluded volume, and
are influenced by the constraints of covalent bonding linkages along the chain. This
approach is equally important: 30–40% of primary sequences in PDB are associated with
disordered or unstructured regions. Conformational preferences are described
statistically.

2
Statistical Models
Structure described in terms of spatial probability distribution functions.
There may be constraints on geometry or energy functions that describe interactions
between and within chains.
We will discuss several models that emerge for a continuous chain in space that varies in
stiffness, constraints on conformation, and excluded volume.
o Segment models: random coils, feely jointed chain, freely rotating chain
o Lattice models: Flory–Huggins theory
o Continuum model: worm-like chain

3
Segment Models1
(n + 1) beads link by n segments or bonds of length
.
Each bead has a position ir
and a mass mi.
Each bond is assigned a vector, 1i i ir r .
The bending angle between adjacent segments i and
(i + 1) is θi: 1cos i i
For each bending angle there is an associated
dihedral angle ϕi defined as the rotation of segment
(i+1) out of the plane defined by segments i and (i‒
1).
There are n‒1 separate bending and dihedral angles.
Statistical Variables for Macromolecules
End‐to‐end distance
The contour length is the full length of the polymer along the contour of the chain:
CL n
Each chain has the same contour length, but varying dimensions in space that result from
conformational flexibility. The primary structural variable for measuring this conformational
variation is the end-to-end vector between the first and last bead, 0nR r r
, or equivalently
1
n
ii
R
Statistically, the dimensions of a polymer can be characterized by the statistics of the end-to-end
distance. Consider its mean-square value:
2
11
nn
jiji
R R R
After expanding these sums, we can collect two sets of terms: (1) the self-terms with i = j and (2)
the interbond correlations (i ≠ j):
1. C. R. Cantor and P. R. Schimmel, Biophysical Chemistry Part III: The Behavior of Biological Macromolecules.
(W. H. Freeman, San Francisco, 1980), Ch. 18.; K. Dill and S. Bromberg, Molecular Driving Forces: Statistical Thermodynamics in Biology, Chemistry, Physics, and Nanoscience. (Taylor & Francis Group, New York, 2010); P. J. Flory, Principles of Polymer Chemistry. (Cornell University Press, Ithaca, 1953).

4
2 2
2 2 cos
i jj i
ijj i
R n
n
(1)
Here θij is the angle between segments i and j. This second term describes any possible
conformational preferences between segments along the chain. We will call the factor cos θij
the segment orientation correlation function, which is also written
( ) cos
k i
k
i k
g k
k j i
(2)
Here k refers to the separation between two segments. This correlation function can vary in value
from 1 to ‒1, where +1 represents a highly aligned or extended chain and negative values would
be very condensed or compact. No interband correlations (g = 0) is expected for placement of
segments by a random walk.
Interbond correlation can be inserted into segment models, both
through ad hoc rules, or by applying an energy function that
constrains the intersegment interactions. For instance, the
torsional energy function below, Uconf, would be used to weight
the probability that adjacent segments adopt a particular
torsional angle. A general torsional energy function Uconf()
involves all 2(n‒1) possible angles Θ = 1,1,2,2,…
n-1,n1, the joint probability density for adopting a particular
conformation is
conf
conf
( )
( )( )
B
B
U k T
U k T
eP
d e
The integral over Θ reflects 2(n‒1) integrals over polar coordinates for all adjacent segments,
2 2
1 1 1 1 1 10 0 0 0sin sin n n nd d d d d
Then the alignment correlation function is
2 cosi j ijd P
This is not a practical form, so we will make simplifying assumptions about the form of this
probability distribution. For instance, if any segments configuration depends only on its nearest
neighbors then P(Θ)=P(θ,ϕ)(n‒1).

5
Persistence Length
For any polymer, alignment of any pair of vectors in the chain becomes uncorrelated over a long
enough sequence of segments. To quantify this distance we define a “persistence length” p.
1
ni
i ijpj
This is the characteristic distance along the chain for the decay for the orientational correlation
function between bond vectors,
2( ) coskg k
How will this behave? If you consider that |cosθ|<1, then coskθ will drop with increasing k,
approaching zero as k → ∞. That is the memory of the alignment between two bond vectors
drops with their separation, where the distance scale for the loss of correlation is p. We thus
expect a monotonically decaying form to this function:
/2( ) pkg k e (3)
For continuous thin rod models of the polymer, this expression is written in terms of the contour
distance s, the displacement along the contour of the chain (i.e., s = k),
| |/2( ) psg s e
How do we relate θ and p?2 Writing coskθ ≈ exp(k ln[ cosθ ]) and equating this with eq. (3)
indicates that
ln cosp
For stiff chains, we can approximate ln(x) ≈ (1‒x), so
1 cosp
Radius of gyration
The radius of gyration is another important structural variable that is closely related to
experimental observables. Here the polymer dimensions are expressed as extension relative to
the center of mass for the chain. This proves useful for branched polymers and heteropolymers
(such as proteins). Denoting the position and mass of the ith bead as ir
and mi, we define the
center of mass for the polymer as a mass-weighted mean position of the beads in space:
2. C. R. Cantor and P. R. Schimmel, Biophysical Chemistry Part III: The Behavior of Biological Macromolecules.
(W. H. Freeman, San Francisco, 1980), Ch. 19 p. 1033.

6
00
0
n
i ii
n
ii
m rR
m
The sum index starting at 0 is meant to reflect the sum over n+1 beads. The denominator of this
expression is the total mass of the polymer 0
n
iiM m
. If all beads have the same mass, then
mi/M =1/(n+1) and R0 is the geometrical mean of their positions.
00
1
1
n
ii
R rn
The radius of gyration RG for a configuration of the polymer describes the mass-weighted
distribution of beads R0, and is defined through
2 2
0
1
1
n
G ii
R Sn
where iS
is gyration radius, i.e., the radial distance of the ith bead from the center of mass
220
ii i
mS r R
M
(mass-weighted)
220
1
1i iS r R
n
(equal mass beads)
Additionally, we can show that the mean-squared radius of gyration is related to the average
separation of all beads of the chain.
2 22
0 0
1( )
( 1)
n n
G i ji j
R r rn

7
Freely Jointed Chain
The freely jointed chain describes a macromolecule as a backbone for which all possible θ and ϕ
are equally probable, and there are no correlations between segments. It is known as an “ideal
chain” because there are no interactions between beads or excluded volume, and configuration of
the polymer backbone follows a random walk. If we place the first bead at r = 0, we find that R
= 0, as expected for a random walk, and eq. (1) reduces to
2 2R n
or 2 1/2rmsR R n
While the average end-to-end distance may be zero, the variance in the end-to-end distribution is
22r nRR
The radius of gyration for an ideal chain is:
22
6 6G
nRR
Gaussian Random Coil
The freely jointed chain is also known as a Gaussian random coil, because the statistics of its
configuration are fully described by R and R2 , the first two moments of a Gaussian end-to-
end probability distribution P(R).
The end-to-end probability density in one dimension can be obtained from a random walk with n
equally sized steps of length in one dimension, where forward and reverse steps are equally
probable. If the first bead it set at x0 = 0, then the last bead is placed by the last step at position x.
In the continuous limit:
2 22
2
1( , )
2x nP x n e
n
(4)
( , )P x n dx is the probability of finding the end of the chain with n beads at a distance between x
and x+dx from its first bead. Note this equates the rms end-to-end distance with the standard
deviation for this distribution: 2 2 2R n .
To generalize eq. (4) to a three-dimensional chain, we recognize that propagation in the x, y, and
z dimensions is equally probable, so that the 3D probability density can be obtained from a
product of 1D probability densities ( ) ( ) ( ) ( )P r P x P y P z . Additionally, we need to consider the
constraint that the distribution of end-to-end distances are equal in each dimension:
2 2 2 2 2x y zR n

8
and since 2 2 2x y z ,
2 2 23 xR n
Therefore,
2 22 2 2 2
2 2
2 2 2
3/2
2
22 2
3 2
1 1 1( , )
2 2 2
3
2
yx z
x y z
xx x
r
P r n e e e
e
To simplify, we define a scaling parameter with dimensions of inverse length
2 1/22
3 3
2 2R
n
Then, the probability density in Cartesian coordinates,
2 23
3/2( , , , ) rP x y z n e
where r2 = x2 + y2 + z2
Note the units of P(x, y,z,n) are inverse volume or concentration. The probability of finding the
end of a chain of n beads in a box of volume dx dy dz at the position x,y,z is ( , , , )P x y z n dx dy dz .
This function illustrates that the most probable end-to-end distance for a random walk polymer is
at the origin. On the other hand, we can also express this as a radial probability density that gives
the probability of finding the end of a chain at a radius between r and r+dr from the origin. Since
the volume of a spherical shell grows in proportion to its surface area:
P(r,n)dr 4r2P(x, y, z,n)dr
3/2 2
22 2
3 3( , ) 4 exp
2 2
rP r n r
n n
(5)
The units of ( , )P r n are inverse length. For the freely jointed chain, we see that 1 22 / 3R
is the most probable end-to-end distance.

9
Freely Rotating Chain
An extension to the freely jointed chain that adds a single configurational constraint that better
resembles real bonding in polymers is the freely rotating chain. In this case, the backbone angle
has a fixed value, and the dihedral angle can rotate freely.
To describe the chain dimensions, we need to evaluate the angular bond correlations between
segments. Focusing first on adjacent segments, we know that after averaging over all ϕ, the fixed
θ assures that 21
cosi i
. For the next segment in the series, only the component parallel
to 1i
will contribute to sequential bond correlations as we average over i+2:
2 2
1 1 12cos cos si ( )
cos
n sin cosi ii i ii i
Extending this reasoning leads to the observation
2(cos ) j ii j
To evaluate the bond correlations in this expression, it is helpful to define an index for the
separation between two bond vectors:
k = j – i
and cos
Then the segment orientation correlation function is
2( ) ki jg k
For a separation k on a chain of length n, there are n–k possible combinations of bond angles,

10
1
1
( )cosn
j i k
j i k
n k
12 2 2
1
( )n
k
k
R n n k
From this you can obtain
2 2
2
2 11
1 1
n
R nn
In the limit of long chains (n ), we find
221
1nR
and 2 1
6 1G
nR
Restricted dihedrals
When the freely rotating chain is also amended to restrict the dihedral angle ϕ, we can solve the
mean square end-to-end distance in the limit n . Given an average dihedral angle,
cos
2 2 1111
R n
RMS end-to-end distance 1/22R in units
of as a function of n and θ

11
Nonideal Behavior
Flory characteristic ratio
Real polymers are stiff and have excluded volume, but the R ~ n scaling behavior usually
holds at large n (R ≫ p). To characterize non-ideality, we use the Flory characteristic ratio:
2
2n
RC
n
For freely jointed chains Cn = 1. For nonideal chains with
angular correlations, Cn > 1. Cn depends on the chain length
n, but should have an asymptotic value for large n: C. For
example, if we examine long freely rotating chains
2
2
1lim
1n
RC
n
= cos
(In practice, this limit typically holds for n > 30). Consider a tetrahedrally bonded polymer with full angle 109° ( = 54°). then cos = 1/3, and Cn = 2. In practice, we reach the long chain limit C at n ≈ 10. This relation works well for polyglycine and polyethylene glycol (PEG).
Statistical segment or Kuhn length
How stiff or flexible a polymer is depends on the length scale of observation. What is stiff on
one scale is flexible for another. For an infinitely long polymer, one can always find a length
scale for which its statistics are that of a Gaussian random coil. As a result for a segment
polymer, one can imagine rescale continuous segments into one longer “effective segment” that
may not represent atomic dimensions, but rather is defined in order to correspond to a random
walk polymer, with Cn 1. Then, the effective length of the segment is e (also known as the
Kuhn length) and the number of effective segments is ne. Then the freely jointed chain equations
apply:
LC = nee 2 2
e eR n
From these equations, 2 /e CR L . We see that e ≫ applies to stiff chains, whereas e are flexible.
We can also write the contour length as LC = γn, where is a geometric factor < 1 that describes
constraint on bond angles. For a freely rotating chain: cos( /2) . Using the long chain chain
expressions (n→∞): 2 2R C n , we find

12
2
e
C
n nC
1
2p
C
Representative values for polymer segment models
C (ne/n) (nm)
e (nm)
p(nm)
Polyethylene 6.7 (n > 10) 0.154 1.24 0.83
PEG 3.8 0.34
Poly·alanine 9 (n > 70) 0.38 3.6 0.95 0.5
Poly·proline 90 (n > 700) 5-10
dsDNA 86 0.35 30–100 1 50
ssDNA 1.5
Cellulose 6.2
Actin 16700 10000–
20000

13
Excluded Volume Effects
In real polymers, the chance of colliding with another part of the chain increases with chain
length.
22i j
i j
nR
i j i i sg s s i j
g(s) gives the orientational correlations between polymer segments.
Flory, statistical mechanics of chain molecules
If correlations are purely based on bond angles and rotational potential, then g(s) decays
exponentially with s. There is no excluded volume.
With excluded volume, g(s) does not vanish for large k. There are “long-range”
interactions within the chain.
o “Long range” means along long distance along contour, but short range in space.
Excluded volume depends on chain + solvent and temperature.
Virial expansion
At low densities, thermodynamic functions can be expanded in a power series in the number of
particles per unit volume: /n N V (density).
0
int
2int p B
F F F
F N k T nB n C
0F refers to ideal chain
Np is # of polymer molecules
B: units of volume
Excluded volume (repulsion) and attractive interactions are related to the second virial
coefficient B. The excluded volume (or volume correlation relative to ideal behavior) for
interacting beads of a polymer chain is calculated from
3ex 1 exp / BV d r U r k T
U(r) is the interaction potential. In the high temperature limit Vex = 2B. So 2B can be associated
with the excluded volume associated with one segment (bead) of the chain.

14
Temperature dependence
At high T Bk T
The attractive part of potential is negligible, and repulsions result in excluded volume. In
this limit 2 exB V .
As 0T , the attractive part of potential matters more and more, resulting in collapse
relative to ideal chain.
Cross over: Theta point T=Θ
Near Θ 2 ~ ex
TB V
T > Θ High T. Repulsion dominates. Polymer swells (good solvent)
T < Θ Low T. Attractions dominate. Polymer collapses (globule, poor solvent)
Polymer swelling
At high temperatures (T≫Θ), the free energy of a coil can be expressed in terms interaction
potential, which is dominated by repulsions that expand the chain, and the entropic elasticity that
opposes it (see next chapter).
2
3 2
3 3.
4 2B B
n RF U TS nk T B k T const
R n
By minimizing F with respect to the end-to-end distance, R, and solving for R, we can find how
the R scales with polymer size:
2 3/5 3/5( )R B n
We see that the end-to-end distance of the chain with excluded volume scales with monomer
number (n) with a slightly larger exponent than an ideal chain: n3/5 rather than n1/2. Generally,
the relationship between R and n is expressed in terms of the Flory exponent, ν, which is related
to several physical properties of polymer chains:
R n

15
Polymer Loops
For certain problems, we are concerned with cyclic polymers chains:
Bubbles/loops in DNA melting
Polypeptide and RNA hairpins
DNA strand separation in transcription
Cyclic DNA, chromosomal looping, and supercoiling
In describing macromolecules in closed loop form, the primary new variable that we need to
address is the loop’s configurational entropy. Because of configurational constraints that tie the
ends of a loop together (Ree→0) the loop has lower configurational entropy than an unrestrained
coil.
Let’s describe how the configurational entropy of a loop SL depends on the size of the loop. We
will consider the segment model with nL segments in the loop. We start with the radial
probability distribution for an unconstrained random coil, which is the reference state for our
calculations:
3/2 22
2 2
3 3( , ) 4 exp
2 2
rP r n r
n n
(6)
The entropy of the loop SL will reflect the constraints placed by holding the ends of the random
coil together, which we describe by saying the ends of the chain must lie within a small distance
Δr of each other. Since Ree<Δr, 2 2r n , and the exponential term in eq. (6) is ~1. Then the
probability of finding a random coil configuration with an end-to-end distance within a radius Δr
is
3/2
220
1/2 33/2
3/2
3( ) 4
2
6
r
L LL
L
L
P n dr rn
rn
bn

16
In the last line we find that the probability of finding a looped chain decreases as 3/2L LP n ,
where b is the proportionality constant that emerges from integration. From the assumptions we
made, b≪1, and PL<1.
To calculate the configurational entropy of the chain, we assume that the polymer (free or
looped) can be quantified by Ω configurational states per segment of the chain. This reflects the
fact that our segment model coarse-grains over many internal degrees of freedom of the
macromolecule. Then, the entropy of a random coil of n segments is SC = kB ln Ωn. To calculate
the loop entropy, we correct the unrestrained chain entropy to reflect the constraints placed by
holding the ends of the random coil together in the loop.
lnL C B LS S k P
This expression reflects the fact that the number of configurations available to the constrained
chain is taken to be ( ) LnL L L Ln P n , and each of these configurations are assumed to be
equally probable ( lnL B LS k ). Since PL<1, the second term is negative, lowering the loop
entropy relative to the coil. We find that we can express the loop configurational entropy as
3( ) ln ln
2L L B L LS n k n b n
Since this expression derives from the random coil, it does not account for excluded volume of
the chain. However, regardless of the model used to obtain the loop entropy, we find that we can
express it is the same form:
( ) lnL L B L LS n k n a b c n
where a, b, and c are constants. For the random coil c = 1.50, and for a self-avoiding random
walk on a cubic lattice we find that it increases to c = 1.77. In 2D, a random coil results in c =
1.0, and a SAW gives c = 1.44.

17
Readings
1. M. Rubinstein and R. H. Colby, Polymer Physics. (Oxford University Press, New York,
2003).
2. K. Dill and S. Bromberg, Molecular Driving Forces: Statistical Thermodynamics in Biology,
Chemistry, Physics, and Nanoscience. (Taylor & Francis Group, New York, 2010).
3. C. R. Cantor and P. R. Schimmel, Biophysical Chemistry Part III: The Behavior of
Biological Macromolecules. (W. H. Freeman, San Francisco, 1980).
4. R. Phillips, J. Kondev, J. Theriot and H. Garcia, Physical Biology of the Cell, 2nd ed. (Taylor
& Francis Group, New York, 2012).
5. P. J. Flory, Principles of Polymer Chemistry. (Cornell University Press, Ithaca, 1953).

Macromolecules
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 06/10/2018
8. Lattice Models for Polymers1
Polymer lattice models refer to models that represent chain
configurations through the placement of a chain of connected beads
onto a lattice. These models are particularly useful for describing the
configurational entropy of a polymer and excluded volume effects.
However, one can also explicitly enumerate how energetic
interactions between beads influences the probability of observing a
particular configuration. At a higher level, models can be used to describe protein folding and
DNA hybridization.
Entropy of Single Polymer Chain
Calculate the number of ways of placing a single homopolymer chain with n beads on lattice.
Place beads by describing the number of ways of adding a bead to the end of a growing chain:
2( 1)nP M z z
A random walk would correspond to the case where we allow the chain to walk back on itself.
Then the expression is 1nP M z
Note the mapping of terms in 2( 1)nP M z z onto P trans rot conf .
For n M≫N Ωp ≈ M(z–1)n–1
ln
( 1) ln( 1) ln
p B p
B
S k
k n z M
This expression assumes a dilute polymer solution, in which we neglect excluded volume, except
for the preceding segment in the continuous chain.
1. K. Dill and S. Bromberg, Molecular Driving Forces: Statistical Thermodynamics in Biology, Chemistry,
Physics, and Nanoscience. (Taylor & Francis Group, New York, 2010); S. F. Sun, Physical Chemistry of Macromolecules: Basic Principles and Issues, Array ed. (J. Wiley, Hoboken, N.J., 2004), Ch. 4.
(3) Position for remaining n‒2 beads (excludingthe position of the bead at the previous site)
(2) z: Contact number. Number of nearest neighborson lattice
(1) Number of cells available for first bead

2
Self‐Avoiding Walks2
To account for excluded volumes, one can enumerate polymer configurations in which no two
beads occupy the same site. Such configurations are called self-avoiding walks (SAWs).
Theoretically it is predicted that the number of configurations for a random walk on a cubic
lattice should scale with the number of beads as 1( ) np n z n , where γ is a constant which is
equal to 1 for a random walk. By explicitly evaluating self-avoiding walks (SAWs) on a cubic
lattice it can be shown that
1( ) 0.2 np n n
where α = 4.68 and γ = 1.16, and the chain entropy is
( ) ln ( 1)ln 1.6p Bn k n nS .
Comparing this expression with our first result 2( 1)nP M z z we note that in the limit of a
random walk on a cubic lattice, α=z=6, when we exclude only the back step for placing the next
bead atop the preceeding one α=(z‒1)=5, and the numerically determined value is α = 4.68.
2. C. Vanderzande, Lattice Models of Polymers (Cambridge University Press, Cambridge, UK, 1998).

3
Conformational Changes with Temperature
4 bead polymer on a two‐dimensional lattice
Place polymer on lattice z = 4 n = 4
in 2D (with distinguishable end beads):
Ωp = 36M Ωconf = 9 Ωconf = 6
“Folded” E = 0
end-to-end distance: Ree =
“Unfolded” E = ϵ
Note in 2D these are distinct configurations, but not in 3D
Distinguishable beads Indistinguishable beads
3eeR
Neighboring non-bonded beads have favorable contact energy ‒ ϵ
5eeR

4
Configurational Partition Function
Number of thermally accessible microstates.
Q qconf N
qconf eEi kT
istates1
9
g jeE j kT
j levels1
2
microstates energy levels
2 7e/kT
Probability of Being “Folded”
Fraction of molecules in the folded state.
/
22 7
foldE kTfold
fold kTconf
g eP
q e
Mean End‐to‐End Distance
9
1
/(1)(2) 6 35
2 (6 5 3)
iE kTi
eei conf
kT kT
conf
kT
conf
r er
q
e e
q
eq
Also, we can access other thermodynamic quantities:
lnBF k T Q 2
,
lnB
V N
QU k T
TE
, ,
lnlnB B
V N V N
F
T
QS k Q k T
T

5
Flory–Huggins Model of Polymer Solutions
Let’s being by defining the variables for the lattice:
M : total number of lattice cells
NP: number of polymer molecules
n : number of beads per polymer
NS: number of solvent cells
nNP = total number of polymer beads
The total number of lattice sites is then composed of the fraction of sites occupied by polymer
beads and the remaining sites, which we consider occupied by solvent:
M nNP NS
Volume fractions of solvent and polymer:
S
NS
M
P
nNP
M
S
P 1
The mole fraction of polymer:
PP
S P
Nx
N N
xP
is small even if the volume fraction is high.
Excluded Volume for Single Polymer Chain
Generally, excluded volume is difficult to account for if you don’t want to elaborate
configurations explicitly, as in self-avoiding walks. However, there is a mean field approach we
can use to account for excluded volume.
A better estimate for chain configurations that partially accounts for excluded volume:
1 2 ( 1)1 1P
M M M nM z z z
M M M
Large n: P
(z 1)n1
M
M !
( M n)!
1st bead
Second bead on reduced lattice space counting only fraction of empty cells
3rd bead nth bead

6
Entropy of Multiple Polymer Chains
For NP chains, we count growth of chains by adding beads one at a time to all growing chains
simultaneously.
1) First bead. The number of ways for placing the 1st bead for all chains:
1 M M 1 M 2 M N
P1 M !
M NP !
2) Place the second bead on all chains. We assume the solution is dilute and neglect
collisions between chains.
2 1 2 1
!
2 !
P
P P P
N
P
P
M N M N M Nz z z
M M M
z M N
M M N
3) For placing the nth bead on NP growing chains. Here we neglect collisions between site i
and sites >(i+4), which is the smallest separation that one can clash on a cubic lattice.
1 !1
!
PN nn P
P
M Nz
M M n N
4) Total number of configurations of NP chains with n beads:
P 1 n
N P !
P
z 1
M
NP n1 M !
M nNP !N
P!
1st bead 1st chain
1st bead 2nd chain
1st bead on NP
th chain
Ways of placing 2nd bead on 1st chain with a volume reduced by the numberof beads present from the 1st beads. Volume fraction excluded: (M – NP)/M
indistinguishablity of polymer chains
NS!

7
Entropy of Polymer Solution
Entropy of polymer/solvent mixture:
mix lnB PS k
Calculate entropy of mixing:
0 0mix mix solvent polymer
0solvent solvent0 since 1
S S S S
S
The pure polymer has many possible entangled configurations 0P , and therefore a lot of
configurational entropy: 0polymerS . But we can calculate 0
P just by using the formula for P
with
the number of cells set to the number of polymer beads M nNP.
1
0
1
0
!1
!
!
! !
P
P
N n
PP
P P
N n
P P
P S P
N nz
N n N
N n M
M N N n
Since mix 0ln P
BP
S k
mix ln ln
ln ln
S PB S B P
PB S S P
N N nS k N k N
M M
Mkn
where the volume fractions are:
SS
N
M 1P
P S
nN
M
Note for n = 1, we have original lattice model of fluid.
pure solvent pure polymer

8
Polymer–Solvent Interactions
Use same strategy as lattice model of a fluid.
Considering polymer (P) and solvent (S) cells:
U mSSSS mPPPP mSPSP
Number of solvent cell contacts:
zNS 2mSS mSP
Number of polymer cell contacts:
2 2P P PP SPz N n z N n m m
Mean field approximation: Substitute the average number of solvent/polymer contacts.
mix
mix
2 2
2
ln ln2
S PSP SP
SS PP S PB S P SP
B B
SS PPSP SP
B
S PS B S P B P SS S PP P SP
zN N nm m
M
z z N NU k T N N n n
k T k T M
z
k T
z N N nF N k T N k T N N
M
Polymers expand in good solvents, collapse in bad solvents, retain Gaussian random coil
behavior in neutral solvents (θ solvents).
Good solvents < 0.5 3/5 3/520~ ~N R Nr
Bad solvents (collapse) > 0.5 R ~ R0 N1/3
Theta solvents = 0.5 2
20
2~
3
NRr
ωij = interaction energy between cells i and j
mij = Number of contacts between i and j cells
each bead connects to 2 other beads
solvent-polymer bead exchangeparameter

Macromolecules
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 07/21/2018
9. Macromolecular Mechanics
An alternative approach to describing macromolecular conformation that applied both to
equilibrium and non-equilibrium phenomena uses a mechanical description of the forces acting
on the chain. Of course, forces are present everywhere in biology. Near equilibrium these exist as
local fluctuating forces that induce thermally driven excursions from the free-energy minimum,
and biological systems use non-equilibrium force generating processes derived from external
energy sources (such as ATP) in numerous processes such as those in transport and signaling.
For instance, the directed motion of molecular motors along actin and microtubules, or the
allosteric transmembrane communication of a ligand binding event in GPCRs.
Our focus in this section is on how externally applied forces influence macromolecular
conformation, and the experiments that allow careful application and measurement of forces on
single macromolecules. These are being performed to understand mechanical properties and
stress/strain relationships. The can also be unique reporters of biological function involving the
strained molecules.
Single Molecule Force Application Experiments
Force Range (pN)
Displacement (nm)
Loading rate (pN/sec)
Optical Tweezers: 0.1–100 pN 0.1–105 5–10 Near equilibrium AFM: 10–104 0.5–104 100–1000 Non-equilibrium! Stretching under flow: 0.1–1000 pN 10–105 1–100 Steady state force MD simulations: Arb. <10 nm 105–107 !
Remember: Bk T: 4.1 pN nm

2
Force and Work
Here we will focus on the stretching and extension behavior of macromolecules. The work done
on the system by an external force to extend a chain is
extw f dx
Work (w) is a scalar, while force (f) and displacement (x) are vectors. On extension, the external
force is negative, leading to a positive value of w, meaning work was done on the system.
Classical mechanics tells us that the force is the negative gradient of the potential one is
stretching against ( / )f U x
, but we will have to work with free energy and the potential of
mean force since the configurational entropy of the chain is important. Since the change in free
energy for a process is related to the reversible work needed for that process, we can relate the
force along a reversible path to the free energy through
, ,rev
p T N
Gf
x
This describes the reversible process under which the system always remains at equilibrium,
although certainly it is uncomfortable relating equilibrium properties (G) to nonequilibrium ones
such as pulling a protein apart. For an arbitrary process, ΔG ≤ w.
Jarzynski Equality
A formal relationship between the free energy difference between two states and the work
required to move the system from initial to final state has been proposed. The Jarzynski equality
states
eG/kT ew/kBTin
path
Here one averages the Boltzmann-weighted work in the quantity at right over all possible paths
connecting the initial and final states, setting T to the initial temperature (Tin), and one obtains
the Boltzmann weighted exponential in the free energy. This holds for irreversible processes!
Further, since one can show that / /B Bw k T w k Te e , we see that the average work done to move
the system between two states is related to the free energy through w G . This reinforces
what we know about the macroscopic nature of thermodynamics, but puts an interesting twist on
it: Although the average work done to change the system will equal or exceed the free energy
difference, for any one microscopic trajectory, the work may be less than the free energy
difference. This has been verified by single molecule force/extension experiments.

3
Statistical Mechanics of Work
Let’s relate work and the action of a force to changes in statistical thermodynamic variables.1
The internal energy is
j jj
U E P E
and therefore, the change in energy in a thermodynamic process is
j j j jj j
dU d E E dP P dE
Note the close relationship between this expression and the First Law:
– –dU dw dq
We can draw parallels between the two terms in these expressions:
–rev j j
j
j jj
d q TdS E dP
dw pdV or f dx P dE
Heat is related to the ability to change populations of energetically different states, whereas work
is related to the ability to change the energy levels with an external force.
1. T. L. Hill, An Introduction to Statistical Thermodynamics. (Addison-Wesley, Reading, MA, 1960), pp. 11–13,
66–77.

4
Worm‐like Chain
The worm-like chain (WLC) is perhaps the most commonly encountered models of a polymer
chain when describing the mechanics and the thermodynamics of macromolecules. This model
describes the behavior of a thin flexible rod, and is particularly useful for describing stiff chains
with weak curvature, such as double stranded DNA. Its behavior is only dependent on two
parameters that describe the rod: κb its bending stiffness, and LC, the contour length.
Let’s define the variables in this model:
s The distance separating two points along the contour of the rod
Normal unit vector
t
=r
s
Tangent vector
t
s
Curvature of chain
1
R is inverse of local radius of curvature
The worm-like chain is characterized by:
Persistence length, which is defined in terms of tangent vector correlation function:
( ) exp[ | | ](0) ( ) pg s st t s
(1)
Bending energy: The energy it takes to bend the tangent vectors of a segment of length s
can be expressed as
2
0
1
2
L
b b
tU ds
s
(2)
Bending Energy
Let’s evaluate the bending energy of the WLC, making some simplifying assumptions, useful for
fairly rigid rods. If we consider short distances over which the curvature is small, then /s R and
1t d
s ds R
Then we can express the bending energy in terms of an angle:
21
2b bUs

5
Note the similarity of this expression to the energy needed to displace a particle bound in a
harmonic potential with force constant k: U = ½kx2.
The bending energy can be used to obtain thermodynamic averages. For instance, we can
calculate the variance for the tangent vector angles as a function of s (spherical coordinates):
2 ( )2 2
0 0
1( ) sin
2
b BU k T
bend
B
b
s d d eQ
sk T
(3)
Here we have used sin θ ≈ θ. The partition function for the bending of the rod is:
Qbend
d0
2
d0
sin eUb ( ) kBT
Persistence Length
To describe the persistence length of the WLC, we recognize that eq. (1) can be written as
( ) cos ( )g s s and expand this for small θ:
221( )( ) 1cos ( ) ( )1
22
sg s s s
and from eq. (3) we can write:
( ) 1 B
b
sk Tg s
If we compare this to an expansion of the exponential in eq. (1)
( ) 1ps
p
sg s e
we obtain an expression for the persistence length of the worm-like chain
bp
Bk T
End‐to‐End Distance
The end-to-end distance for the WLC is obtained by integrating the tangent vector over one
contour length:
0( )
CLR dst s
So the variance in the end-to-end distance is determined from the tangent vector autocorrelation
function, which we take to have an exponential form:

6
2
0 0
0 0
2 2
( ) ( )
2 2 1
C C
C C p
pC
L L
L L
p C p
s s
L
R R R
ds ds t s t s
ds ds e
R L e
Let’s examine this expression in two limits:
2 2
2 2
rigid:
flexible: 2 2
p C C
p C C p e e p e
L R L
L R L n
DNA Bending in Nucleosomes
What energy is required to wrap DNA around the histone octamer
in the nucleosome? Double stranded DNA is a stiff polymer with a
persistence length of p ≈ 50 nm, but the nucleosome has a radius
of ~4.5 nm. From p and kBT = 4.1 pN nm, we can determine the
bending rigidity using:
b = p kBT = (50 nm)(4.1 pN nm) = 205 pN nm2
Then the energy required to bend dsDNA into one full loop is
2 2
2
-1
-1
(2 )
2 2(2 )
(205pn nm )143pN nm
4.5nm
35 15kcal (mol loops)
or 0.15 kcal basepair
b b bb
B
Us R R
k T
Continuum Mechanics of a Thin Rod2
The worm-like chain is a model derived from the continuum mechanics of a thin rod. In addition
to bending, a thin rod is subject to other distortions: stretch, twist, and write. Let’s summarize the
energies required for these deformations:
2. D. H. Boal, Mechanics of the Cell, 2nd ed. (Cambridge University Press, Cambridge, UK, 2012).

7
Deformation variables:
s: Position along contour of rod
L0: Unperturbed length of rod
t
: Tangent vector.
/dt ds
: curvature
Ω: Local twist
The energy for distorting the rod is
st b twU U U U
In the harmonic approximation for the restoring force, we can write these contributions as
0 0 0
2
21 1 1
2 2 2
L L L
st b tw
L L L
dtU sds ds ds
ds
The force constants, with representative values for dsDNA, are:
Stretching: st stentropic stenthalpic
κst-entropic ≈ 3kBT/pLc
Bending: κb κb ≈ 205 pN nm2
Twisting: κtw κtw ≈ (86nm)kBT = 353 pN nm2
Writhe
An additional distortion in thin rods is writhe, which refers to coupled twisting and coiling, and
is an important factor in DNA supercoiling. Twisting of a rod can induce in-plane looping of the
rod, for instance as encountered with trying to coil a garden hose. The writhe number W of a rod
refers to the number of complete loops made by the rod. The writhe can be positive or negative
depending on whether the rod crosses over itself from right-to-left or left-to-right. The twist
number T is the number of Ω = 2π rotations of the rod, and can also be positive of negative.

8
The linking number L = T+W is conserved in B-form DNA, so that twist can be converted into
writhe and vice-versa. Since DNA in cells is naturally negatively supercoiled in nucleosomes,
topoisomerases are used to change of linking number by breaking and reforming the
phosphodiester backbone after relaxing the twist. Negatively supercoiled DNA can be converted
into circular DNA by local bubbling (unwinding into single strands).

9
Polymer Elasticity and Force–Extension Behavior
The Entropic Spring
To extend a polymer requires work. We calculate the reversible work to extend the
macromolecule from the difference in free energy of the chain held between the initial and final
state. This is naturally related to the free energy of the system as a function of polymer end-to-
end distance:
00( ) ( )
r
stretch revrw F r F r f dr
For an ideal chain, the free energy depends only on the entropy of the chain: F TS . There are
fewer configurational states available to the chain as you stretch to larger extension. The number
of configurational states available to the system can be obtained by calculating the
conformational partition function, Qconf. For stretching in one-dimension, the Helmholtz free
energy is:
ln
– ·
conf B conf
B confk T Q
dF p dV S dT f dx
S k lnQ
, ,
ln conf confB
V T N
Q SFf k T T
x xx
(4)
When you increase the end-to-end distance, the number of configurational states available to the
system decreases. This requires an increasingly high force as the extension approaches the
contour length. Note that more force is needed to stretch the chain at higher temperature.
Since this is a freely joined chain and all microstates have the same energy, we can equate the
conformational partition function of a chain at a particular extension x with the probability
density for the end-to-end distances of that chain
( )conf fjcQ P r
Although we are holding the ends of the chain at a fixed and stretching with the ends restrained
along one direction (x), the probability distribution function takes the three-dimensional form to

10
properly account for all chain configurations: 2 2
0( ) rconfP r P e with 2 23 / 2Bk T n and
3 3/20 β πP is a constant. Then
2 20ln ( ) lnconfP r r P
The force needed to extend the chain can be calculated from eq. (4) after substituting r2 =
x2+y2+z2, which gives
22 B stf k T x x
So we have a linear relationship between force and displacement, which is classic Hooke’s Law spring with a force constant κst given by
2 2
0
3 3B Bst
k T k T
n r
Here 20r refers to the mean square end-to-end distance for the FJC in the absence of any
applied forces. Remember: 2 20 Cr n L . In the case that all of the restoring force is due to
entropy, then we call this an entropic spring κES.
2
2, ,2ES
N V T
T S
x
This works for small forces, while the force is reversible. Notice that κES increases with
temperature—as should be expected for entropic restoring forces.
Example: Stretching DNA3
At low force:
dsDNA → st = 5 pN/nm
ssDNA → st = 160 pN/nm → more entropy/more force
At higher extension you asymptotically approach the contour length.
3. A. M. van Oijen and J. J. Loparo, Single-molecule studies of the replisome, Annu. Rev. Biophys. 39, 429–448
(2010).

11
Force/Extension of a Random Walk Polymer
Let’s derive force extension behavior for a random walk polymer in one dimension. The end-to-
end distance is r, the segment length is , and the total number of segments is n.
For any given r, the number of configurations available to the polymer is:
!
! !
n
n n
This follows from recognizing that the extension of a random walk chain in one dimension is
related to the difference between the number of segments that step in the positive direction, n+,
and those that step in the negative direction, n‒. The total number of steps is n = n+ + n‒. Also,
the end-to-end distance can be expressed as
( ) (2 ) ( 2 )r n n n n n n (5)
1
2
rn n
1
2
n
r
Then we can calculate the free energy of the random walk chain that results from the entropy of
the chain, i.e., the degeneracy of configurational states at any extension. This looks like an
entropy of mixing calculation:
ln
ln ln ln
ln ln
B
B
B
F k T
k T n n n n n n
nk T

12
11
2
nx
n
Here the fractional end-to-end extension of the chain is
C
rx
L (6)
Next we can calculate the force needed to extend the polymer as a function of r:
Ff
r
→
F
r
1
2 Cr L
Using eq. (5)
1ln ln
2
1ln
2 1
1 1ln
2 1
BC
B
C
B
f nk TL
nk T xL x
k T x
x
1tanh ( )Bk T
f x
(7)
where I used the relationship: 11ln 2 tanh ( )
1
xx
x
. Note, here the forces are scaled in units of
/Bk T . For small forces x≪1, 1tanh ( ) xx and eq. (7) gives B
C
k Tf r
L
. This gives Hooke’s
Law behavior with the entropic force constant expected for a 1D chain. For a 3D chain, we
would expect: 3 B
C
k Tf r
L
. The spring constant scales with dimensionality.

13
The relationship between position, force, and the partition function
Now let’s do this a little more carefully. From classical statistical mechanics, the partition
function is
3 3 exp( / )N NBQ dr dp H k T
Where H is the Hamiltonian for the system. The average value for the position of a particle
described by the Hamiltonian is
3 31exp( / )Bx dr dp x H k T
Q
If the Hamiltonian takes the form
H f x
Then
, , , ,
lnBB
V T N V T N
k T Q Qx k T
Q f f
This describes the average extension of a chain if a force is applied to the ends.
Force/Extension Behavior for a Freely Jointed Chain
Making use of the expressions above and NQ q
3 3 BU kTconf
f r k Tq dr dp e e
, ,
ln confB
U r n
qNk Tr
f

14
Here we also inserted a general Hamiltonian which accounts for the internal chain interaction
potential and the force ex the chain: H U f r
. For N freely jointed chains with n segments,
we set U→0, and focus on force exerted on every segment of the chain.
1 1
cosn n
i ii i
f r f f
Treating the segments as independent and integrating over all θ, we find that
2 sinh( )confq f
1
cothr n (8)
where the unitless force parameter is
B
f
k T
(9)
As before, the magnitude of force is expressed relative to /Bk T . Note this calculation is for the
average extension that results from a fixed force. If we want the force needed for a given average
extension, then we need to invert the expression. Note, the functional form of the force-extension
curve in eq. is different than what we found for the 1D random walk in eq. (7). We do not expect
the same form for these problems, since our random walk example was on a square lattice, and
the FJC propagates radially in all directions.
Derivation
For a single polymer chain:
3 3
/1( )
ln
B B
B B
U k T f r k T
U k T f r k T
B
u
q dr dp e e
P r e eq
qk Tr
fq
In the case of the Freely Jointed Chain, set U→0.
1 1
cosn n
i ii i
f r f f
Decoupled segments: 3 exp cos ii B
fq dr
k T

15
2
0 0exp[ cos ]sin
2 sinh( )
n
n
d d
1
ln
2 sinh( )ln
coth( )
B
B
k T qrf
nk Tf
nr
coth(x) ex e x
ex e x
or 1coth( )x The average fractional extension: / Cx r L
Now let’s look at the behavior of the expression for x —also known as the Langevin function.
1coth( )r n (10)
Looking at limits:
Weak force (φ≪1): f /Bk T
Inserting and truncating the expansion: 3 51 1 1 2coth
3 45 945
, we get
1
3C
rx
L
21
3 B
nr f
k T
or 2
3ES
Bk Tf r r
n
Note that this limit has the expected linear relationship between force and displacement,
which is governed by the entropic spring constant.
Strong force (φ≫1). /Bf k T Taking the limit coth(x) →1.
1
1r n
Or 1
where1
B
C
k T rf xx L
For strong force limit, the force extension behavior scales as, x~1‒f ‒1.
limf
lim
LC Contour length

16
So, what is the work required to extend the chain?
At small forces, we can integrate over the linear force-extension behavior. Under those
conditions, to extend from r to r+Δr, we have
22
0
3
2
r
e Sv EB
r
k Tw r dr r
n
Force/Extension of Worm‐like Chain
For the worm-like chain model, we found that the variance in the end-to-end distance was
22 2 2 1 pCp C p
LLr e (11)
where LC is the contour length, and the persistence length was related to the bending force
constant as bp
Bk T
. The limiting behavior for eq. (11) is:
22
2
2
rigid:
flexible: ~ 2
p C C
p C C p
e e
L Lr
L Lr
n
Following a similar approach to the FJC above, it is not possible to find an exact solution for the
force-extension behavior of the WLC, but it is possible to show the force extension behavior in
the rigid and flexible limits.
Setting 2p = e , /e Bf k T , and using the fractional extension C
rxL
:
1) Weak force (φ≪1) Expected Hooke’s Law behavior
33eB
e Be C B
fk Tf k T f xr
L k T
For weak force limit, the force extension behavior scales as, x~f.
2) Strong force (φ≫1)
2
1 11
2 4 1e
e B CB
ff k T r L
k T x
For strong force limit, the force extension behavior scales as, x~1‒f ‒1/2.
An approximate expression for the combined result (from Bustamante):
2
1 1
44 1pf
xkT x
(12)
∴ for WLC
(2p = e)

17
Adapted with permission from N. M. Toan and D. Thirumalai, Macromolecules 43, 4394–4400 (2010). Copyright 2010 American Chemical Society.

Diffusion
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 08/04/2018
10. Diffusion
Continuum Diffusion
We are now going to start a new set of topics that involve the dynamics of molecular transport. A
significant fraction of how molecules move spatially in biophysics is described macroscopically
by “diffusion” and microscopically through its counterpart “Brownian motion”. Diffusion refers
to the phenomenon by which concentration and temperature gradients spontaneously disappear
with time, and the properties of the system become
spatially uniform. As such, diffusion refers to the
transport of mass and energy in a nonequilibrium
system that leads toward equilibrium. Brownian motion
is also a spontaneous process observed in equilibrium
and non-equilibrium systems. It refers to the random motion of molecules in fluids that arises
from thermal fluctuations of the environment that rapidly randomize the velocity of particles.
Much of the molecular transport in biophysics over nanometer distances arises from diffusion.
This can be contrasted with directed motion, which requires the input of energy and is crucial for
transporting cargo to targets over micron-scale distances. Here we will start by describing
diffusion in continuum systems, and in the next section show how this is related to the Brownian
motion of discrete particles.
Fick’s First Law
We will describe the time evolution of spatially varying concentration distributions C(x,t) as they
evolve toward equilibrium. These are formalized in two laws that were described by Adolf Fick
(1855).1 Fick’s first law is the “common sense law” that is in line with everyone’s physical
intuition. Molecules on average will tend to diffuse from regions of higher concentration to
regions of lower concentration. Therefore we say that the flux of molecules through a surface, J,
is proportional to the concentration gradient across that surface.
C
J Dx
(1)
J is more accurately called a flux density, since it has units of
concentration or number density per unit area and time. The
proportionality constant between flux density J (mol m–2 s–1) and
concentration gradient (mol m–4) which sets the timescale for the
process is the diffusion constant D (m2 s–1). The negative sign
1. A. Fick, Ueber diffusion, Ann. Phys. 170, 59–86 (1855).

2
assures that the flux points in the direction of decreasing concentration. This relationship follows
naturally, when we look at the two concentration gradients in the figure. Both C and C have a
negative gradient that will lead to a flux in the positive direction. C will give a bigger flux than
C because there is more probability for flow to right. The gradient disappears and the
concentration distribution becomes constant and time invariant at equilibrium. Note, in a general
sense, /C x can be considered the leading term in an expansion of C in x.
Fick’s Second Law
Fick’s second law extends the first law by adding an additional
constraint based on the conservation of mass. Consider diffusive
transport along x in a pipe with cross-sectional area a, and the
change in the total number of particles within a disk of thickness
Δx over a time period Δt. If we take this disk to be thin enough
that the concentration is a constant at any moment in time, then
the total number of particles in the slab at that time is obtained
from the concentration times the volume:
N = aC(t)∆x
Within the time interval Δt the concentration can change and therefore the total number of
particles within the disk changes by an amount
ΔN=aC(t+Δt) ‒ C(t)Δx
Now, the change in the number of particles is also dependent on the fluxes of molecules at the
two surfaces of the disk. The number of molecules passing into one surface of the disk is ‒aJ∆t,
and therefore the net change in the number of molecules during Δt is obtained from the
difference of fluxes between the left and right surfaces of the disk:
ΔN = –a J(x+Δx) ‒ J(x)∆t
Setting these two calculations of ΔN equal to each other, we see that the flux and concentration
gradients for the disk are related as
C(t+Δt) ‒ C(t)∆x = ‒J(x+Δx) ‒ J(x)∆t
or rewriting this in differential form
C J
t x
(2)
This important relationship is known as a continuity expression. Substituting eq. (1) into this
expression leads to Fick’s Second Law

3
2
2
C CD
t x
(3)
This is the diffusion equation in one dimension, and in three dimensions:2
2C
D Ct
(4)
Equation (4) can be used to solve diffusive transport problems in a variety of problems, choosing
the appropriate coordinate system and applying the specific boundary conditions for the problem
of interest.
Diffusion from a Point Source
As our first example of how concentration distributions evolve diffusively, we consider the time-
dependent concentration profile when the concentration is initially all localized to one point in
space, x = 0. The initial condition is
0( , 0) ( )C x t C x
and the solution to eq. (3) is
C(x,t) C
0
4Dte x2 4 Dt (5)
The concentration profile has a Gaussian form which is centered on the origin, ⟨x⟩ = 0, with the
mean square displacement broadening with time as:
2 2x Dt
2. This equation assumes that D is a constant, but if it is a function of space: C D C . In three dimensions,
Fick’s First Law and the continuity expression are: J(r,t) vC(r,t)DC(r,t) and dC(r,t) / dt J(r,t) where v is the velocity of the fluid. These expressions emphasize that flux density and velocity are vectors, whereas concentration field is a scalar.

4
Diffusive transport has no preferred direction. Concentration profiles spread evenly in the
positive and negative direction, and the highest concentration observed will always be at the
origin and have a value max 0 / 4C C Dt . Viewing time-dependent concentrations in space
reveal that they reach a peak at tmax = x2/2D, before decaying at t‒1/2 (dashed line below).
When we solve for 3D diffusion from a point source:
0( , , , 0) ( ) ( ) ( )C x y z t C x y z
If we have an isotropic medium in which D is identical for diffusion in the x, y, and z
dimensions,
2 40
3/2
( , , , )
4r DtC
C x y z t eDt
(6)
where 2 2 2 2r x y z . Calculating the mean square displacement from
2
2 0
0
( , )
( , )
6
dr r C r tr
dr C r t
Dt
or in d dimensions, 2 (2 ) r d Dt .
Diffusion Constants
Typical diffusion constants for biologically relevant molecules in water are shown in the graph
below, varying from small molecules such as O2 and glucose in the upper left to proteins and
viruses in the lower right.

5
For a typical globular protein, typically diffusion coefficients are:
in water D ~ 10–10 m2/s in cells D ~ 10–12 m2/s in lipids D ~ 10–14 m2/s
1/22 1 , ~ 0.4 sec in cells
10 , ~ 40 sec in cells
µm trµm t
Ions in water at room temperature usually have a diffusion coefficient of 0.6×10–5 to
2×10–5 cm2/s.
Lipids:
o Self-diffusion 10–12 m2/s
o Tracer molecules in lipid bilayers 1–10×10–12 m2/s

6
Anomalous Diffusion
The characteristic of simple diffusive behavior is the linear
relationship between the mean square displacement and time.
Deviation from this behavior is known as anomalous diffusion,
and is characterized by a scaling relationship 2 ~ .r t We refer
to ν<1 as sub-diffusive behavior and ν>1 as super-diffusive.
Diffusion in crowded environments can result in sub-diffusion.3
Thermodynamic Perspective on Diffusion
Thermodynamically, we can consider the driving force for diffusion as a gradient in the free
energy or chemical potential of the system. From this perspective, in the absence of any other
interactions, the driving force for reaching uniform spatial concentration is the entropy of
mixing. For a mixture with mole fraction xA, we showed
mix ln ln 1
ln 1
B A A B B B A
A B A A
S Nk x x x x x x
N k x for x
We then use ΔF = ‒TΔS to calculate the chemical potential:
,
ln
AA V T
A B A
F
N
k T x
We see that a concentration gradient, means that the mole fraction and therefore chemical
potential is different for two positions in the system. At equilibrium 1 2 A Ar r , which
occurs when 1 2A Ax r x r .
Thermodynamics does not tell you about rate, only the direction of spontaneous change
(although occasionally diffusion is discussed in terms of a time-dependent “entropy
production”). The diffusion constant is the proportionality constant between gradients in
concentration or chemical potential and the time-dependent flux of particles. The flux density
described in Fick’s first law can be related to µi, the chemical potential for species i:
i i i
iB i
DC µJ
k T r
3. J. A. Dix and A. S. Verkman, Crowding effects on diffusion in solutions and cells, Annu. Rev. Biophys. 37,
247–263 (2008).

7
Solving the Diffusion Equation
Solutions to the diffusion equation, such as eq. (5) and (6), are commonly solved with the use of
Fourier transforms. If we define the transformation from real space to reciprocal space as
, ( ) ikxC k t C x e dx
one can express the diffusion equation in 1D as
2,
,dt
dC k tDk C k t
(7)
[More generally one finds that the Fourier transform of a linear differential equation in x can be
expressed in polynomial form: ( / ) ( ) ( )n n nf x ik f k F ]. This manipulation converts a partial
differential equation into an ordinary one, which has the straightforward solution
2, ,0 expC k t C k Dk t . We do need to express the boundary conditions in reciprocal
space, but then, this solution can be transformed back to obtain the real space solution using
1( , ) (2 ) , ikxC x t C k t e dk
.
Since eq. (7) is a linear differential equation, sums of solutions to the diffusion equation are also
solutions. We can use this superposition principle to solve problems for complex initial
conditions. Similarly, when the diffusion constant is independent of x and t, the general solution
to the diffusion equation can also be expressed as a Fourier series. If we separate the time and
space variables, so that the form of the solution is , C x t X x T t we find that we can write
22
2
1 1T x
DT t x x
Where α is a constant. Then 2DtT e and cos sinx A x B x . This leads to the general
form:
2
0
( , ) cos sin n Dtn n n n
n
C x t A x B x e
(8)
Here An and Bn are constants determined by the boundary conditions.
Examples
Diffusion across boundary
At time t = 0, the concentration is uniform at a value C0 for x ≥ 0, and zero for x < 0, similar to
removing a barrier between two homogeneous media. Using the superposition principle, the
solution is obtained by integrating the point source solution, eq. (5), over all initial point sources
(x – x0) such that x0 = 0 ∞. Defining 2 20( ) / 4y x x Dt ,

8
0
2
( )
4
00 0 ( )( , )
2 4x x
Dt
y x xC CC x t dy e erfc
Dt
Diffusion into “hole”
A concentration “hole” of width 2a is inserted into a box of length 2L with an initial
concentration of C0. Let’s take L = 2a. Concentration profile solution:
2
01
cos,
2sin
n Dtn n
n
nn n
L aC C A ex t x
L
a nA
n L
Fluorescence Recovery after Photobleaching (FRAP): We can use this solution to
describe the diffusion of fluorescently labeled molecules into a photobleached spot.
Usually observe the increase of fluorescence with time from this spot. We integrate
concentration over initial hole:
20
1
( ) ( , )
2( 1) n
a
FRAP a
Dtn
n
N t C x t dx
aC L L A e
L

9
Reflecting and Absorbing Boundary Conditions
We will be interested in describing the time-dependent probability distribution for the case in
which particles are releases at 0x , subject to encountering an impenetrable wall at wx x ,
which can either absorb or reflect particles.
Consider the case of a reflecting wall, where the boundary condition requires that the flux at xw is
zero. This boundary condition and the resulting pile-up near the wall can be described by making
use of the fact that any , wP x x t can be reflected about wx , which is equivalent to removing
the boundary and adding a second source term to ,P x t for particles released at 2 wx x
refl , , 2 , w wP x t P x t P x x t x x
This is also known as a wrap-around solution, since any component with any population from
,P x t that passes the position of the wall is reflected about xw. Similarly, an absorbing wall,
, 0 wP x x t , means that we remove any population that reached xw, which is obtained from
the difference of the two mirrored probability distributions:
abs , , 2 , w wP x t P x t P x x t x x

10
Steady‐State Solutions
Steady state solutions can be applied when the concentration gradient may vary in space but does
not change with time, / 0C t . Under those conditions, the diffusion eq. (4) simplifies to
Laplace’s equation
2 0C (9)
For certain conditions this can be integrated directly by applying the proper boundary conditions,
and then the steady state flux at a target position is obtained from Fick’s first law, eq. (1).
Diffusion through a Membrane4
The steady-state solution to the diffusion equation in
one dimension can be used to describe the diffusion
of a small molecule through a cell plasma membrane
that resists the diffusion of the molecule. In this
model, the membrane thickness is h, and the
concentrations of the diffusing small molecule in the
fluid on left and right side of membrane are Cl and Cr. Within the membrane resists diffusion of
the small molecule, which is reflected in the small molecule’s partition coefficient between
membrane and fluid:
membrane
fluid
CK
Cp
Kp can vary between 103 and 10–7 depending on the nature of the small molecules and membrane
composition.
For the steady-state diffusion equation 2 2/ 0,C x solutions take the form 1 2( )C x A x A .
Applying boundary conditions for the concentration of small molecule in the membrane at the
two boundaries, we find
1r lK C C
Ah
p 2 lA CK p
Then we can write the transmembrane flux density of the small molecule across the membrane as
mol molmol r
K D K D CCJ D C C
x h h
p p
The membrane permeability is equivalent to the volume of small molecule solution that diffuses
across a given area of the membrane per unit time, and is defined as
4. A. Walter and J. Gutknecht, Permeability of small nonelectrolytes through lipid bilayer membranes, J. Membr.
Biol. 90, 207–217 (1986).

11
P
m
J
C
KpD
mol
h(m s–1) (10)
The membrane resistance to flow is R = 1/Pm, and the rate of transport across the membrane is
dn/dt = J A, where A is area.
This linear relationship in eq. (10) between Pm and Kp, also known as the Overton relation, has
been verified for thousands of molecules. For small molecules with molecular weight <50, Pm
can vary from 101 to 10–6 cm s–1. It varies considerably even for water across different membrane
systems, but its typical value for a phospholipid vesicle is 10–3 cm s–1. Some of the highest
values (>50 cm s–1) are observed for O2. Cations such as Na+ and K+ have permeabilities of
~5×10–14 cm s–1, and small peptides have values of 10–9–10–6 cm s–1.
Diffusion to Capture
What is the flux of a diffusing species onto a spherical surface from a solution with a bulk
concentration C0? This problem appears often for diffusion limited reaction rates. To find this,
we calculate the steady-state radial concentration profile C(r) around a perfectly absorbing
sphere with radius a, i.e. C(a) = 0. At steady state, we solve eq. (9) by taking the diffusion to
depend only on the radial coordinate r and not the angular ones.
22
10
Cr
r r r
Let’s look for the simplest solution. We begin by assuming that the quantity in parenthesis is a
constant and integrate twice to give
C(r) A
1
r A
2 (11)
Where A1 and A2 are constants of integration. Now, using the boundary conditions ( ) 0C a and
0( )C C we find:
0( ) 1
aC r C
r
Next, we use this expression to calculate the flux of molecules incident on the surface of the
sphere (r = a).
0
r a
C DCJ a D
r a (12)

12
Here J is the flux density in units of (molecules area–1
sec–1) or [(mol/L) area–1 sec–1]. The sign of the flux
density is negative reflecting that it is a vector quantity
directed toward r = 0. We then calculate the rate of
collisions of molecules with the sphere (the flux, j) by
multiplying the magnitude of J by the surface area of the
sphere (A = 4πa2):
04 j JA D aC
This shows that the rate constant, which expresses the proportionality between rate of collisions
and concentration is k = 4πDa.
Probability of capture
In an extension of this problem useful to ligand binding simulations, we can ask what the
probability is that a molecule released near an absorbing sphere will reach the sphere rather than
diffuse away?
Suppose a particle is released near a spherical absorber
of radius a at a point r = b. What is the probability that
the particle will be absorbed at r = a rather than
wandering off beyond an outer perimeter at r = c?
To solve this problem we solve for the steady-state
flux at the surfaces a and c subject to the boundary
conditions C(a) = 0, C(b) = C0, and C(c) = 0. That is,
the inner and outer surfaces are perfectly absorbing,
but the concentration has a maximum value C(b) = C0
at r = b.
We separate the problem into two zones, a-to-b and b-to-c, and apply the general solution eq.
(11) to these zones with the appropriate boundary conditions to yield:
0
0
11 /
1/ 1
C aC r a r b
a b r
C aC r b r c
c b r
Then the radial flux density is:

13
02
02
1 /
/ 1
r
r
DC aJ r a r b
a b r
DC cJ r b r c
c b r
Calculating the areas of the two absorbing surfaces and multiplying the flux densities by the
areas gives the flux. The flux from the spherical shell source to the inner absorber is
in 041 /
aj DC
a b
and the flux from the spherical shell source to the outer absorber is
out 04
/ 1
cj DC
c b
We obtain the probability that a particle released at r = b and absorbed at r = a from the ratio
in
in outcapture
a c bjP
j j b c a
In the limit c, this probability is just a/b. This is the probability of capture for the sphere of
radius a immersed in an infinite medium. Note that this probability decreases only inversely with
the radial distance b–1, rather than the surface area of the sphere.
Readings
1. H. C. Berg, Random Walks in Biology. (Princeton University Press, Princeton, N.J., 1993).
2. K. Dill and S. Bromberg, Molecular Driving Forces: Statistical Thermodynamics in Biology,
Chemistry, Physics, and Nanoscience. (Taylor & Francis Group, New York, 2010).

Diffusion
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 08/04/2018
11. Brownian Motion
Brownian motion refers to the random motions of small particles under thermal excitation in
solution first described by Robert Brown (1827), 1 who with his microscope observed the
random, jittery spatial motion of pollen grains in water. This phenomenon is intrinsically linked
with diffusion. Diffusion is the macroscopic realization of the Brownian motion of molecules
within concentration gradients. The theoretical basis for this relationship was described by
Einstein in 1905, 2 and Jean Perrin 3 provided the detailed experiments that confirmed his
predictions.
Since the motion of any one particle is unique, the Brownian motion must be described
statistically. We observe that the mean-squared displacement of a particle averaged over many
measurements grows linearly with time, just as with diffusion.
The proportionality factor between mean-squared displacement and time is the diffusion constant
in Fick’s Second Law. As for diffusion, the proportionality factor depends on dimensionality. In
1D, if 2( ) / 2x t t D then in 3D 2( ) / 6r t t D , where D is the diffusion constant.
Brownian motion is a property of molecules at thermal equilibrium. It
applies to a larger particle (i.e., a protein) experiencing an imbalance
of many microscopic forces exerted by many much small molecules
of the surroundings (i.e., water). The thermal agitation originates by
partitioning the kinetic energy of the system on average as kBT/2 per
degree of freedom. Free diffusion implies motion which is only
limited by kinetic energy.
1. R. Brown, "On the Particles Contained in the Pollen of Plants; and On the General Existence of Active
Molecules in Organic and Inorganic Bodies" in The Miscellaneous Botanical Works of Robert Brown, edited by J. J. Bennett (R. Hardwicke, London, 1866), Vol. 1, pp. 463-486.
2. A. Einstein, Über die von der molekularkinetischen Theorie der Wärme geforderte Bewegung von in ruhenden Flüssigkeiten suspendierten Teilchen, Ann. Phys. 322, 549–560 (1905).
3. J. Perrin, Brownian Movement and Molecular Reality. (Taylor and Francis, London, 1910).
2
0rtr

2
Brownian motion applies to a specific range of forces and masses where thermal energy
(kBT(300 K) = 4.1 pN nm) can have a significant influence on a particle. Let’s look at the
average translational kinetic energy:
2 1
22x
Bmv k T
For a ~10 kDa protein with mass ~10–23 kg, the root mean squared velocity due to thermal
energy is 2 1/2rms xvv = 20 m/s. For water at 300 K, D ~10–5 cm2/s. The same protein has a net
displacement in one second of 2 1/2 2rms x Dx t
50 m. The large difference in these
values indicates the large number of randomizing collisions that this particle experiences during
one second of evolution: (vrms1sec)/xrms ≈ 4×105. For the protein, the velocities and
displacements are a dominant force on the molecular scale. In comparison, a 1 kg mass with kBT
of energy will have vrms ~ 10–11 m/s, and an equally insignificant displacement!
Ergodic Hypothesis
A system is known as ergodic when time average and ensemble averages for a time-dependent
variable are equal.
Ensemble average: 1
( ) ii
x x P x x dxN
Time-average: 0
1( ) lim ( )
T
Tx t x t dt
T
In practice, the time average can be calculated using a single particle trajectory by averaging
over the displacement observed for all time intervals within the trajectory such that t=(tfinal‒
tinitial).
In the case of Brownian motion and diffusion: 2 2
( ) ( )t t 0 0r r r r .

3
Random Walk and Diffusion
We want to describe the correspondence between a microscopic picture for the random walk of
particles and macroscopic diffusion of particle concentration gradients. We will describe the
statistics for the location of a random walker in one dimension (x), which is allowed to step a
distance Δx to the right (+) or left (–) during each time interval Δt. At each time point a step must
be taken left or right, and steps to left and right are equally probable.
Let’s begin by describing where the system is at after taking n steps qualitatively. We can relate
the position of the system to where it was before taking a step by writing:
( ) ( 1)x n x n x
This expression can be averaged over many steps:
( ) ( 1)
( 1) ( 2) (0)
x n x n
x n
x
x n x
Since there is equal probability of moving left or right with each step, the ±Δx term averages to
zero, and x does not change with time. The most probable position for any time will always be
the starting point.
Now consider the variance in the displacement:
2 22
22
( 1) 2 ( 1) ( )( )
( )( 1)
x xx n x nx n
x xn
In the first line, the middle term averages to zero, and the variance gains a factor of Δx2.
Repeating this process for each successive step back shows that the mean square displacement
grows linearly in the number of steps.
2
22
22
0(0)
( )(1)
2( )(2)
x
xx
xx
2 2( ) ( )n xx n (1)
Qualitatively, these arguments indicate that the statistics of a random walker should have the
same mean and variance as the concentration distribution for diffusion of particles from an initial
position.

4
Random Walk Step Distribution Function
Now let’s look at this a little more carefully and describe the probability distribution for the
position of particles after n steps, which we equate with the number of possible random walk
trajectories that can lead to a particular displacement. What is the probability of starting at x0 = 0
and reaching point x after n jumps separated by the time interval Δt?
Similar to our discussion of the random walk polymer, we can express the displacement of a
random jumper to the total number of jumps in the positive direction n+ and in the negative
direction n–. If we make n total jumps, then
n = n+ + n– → t = n Δt
The total number of steps n is also our proxy for the length of time for a given trajectory, t. The
distance between the initial and final position is related to the difference in + and ‒ steps:
m = n+ – n– → x = m Δx
Here m is our proxy for the total displacement x. Note from these definitions we can express n+
and n– as
2
n mn
(2)
The number of different ways of making n jumps with the constraint of n+ positive and n–
negative jumps is
!
! !
n
n n
The probability of observing a particular sequence of n “+” and “–” jumps is
( ) ( ) ( ) (1 / 2)nn nP n P P .
The total number of trajectories that are possible with n equally probably “+” and “‒” jumps is
2n, so the probability that any one sequence of n steps will end up at position m is given by Ω/2n
or

5
!1( , )
! !2
!1
2 ! !2 2
n
n
nP m n
n n
nn m n m
This is the binomial probability distribution function. Looking at the example below for twenty
steps, we see m = 0 and for a discrete probability distribution which has a Gaussian envelope.
For very large n, the distribution function becomes continuous. To see this, let’s apply Stirling’s
approximation, ! ( / ) 2 nn n e n , and after a bit of manipulation we find4
2 22
( , ) m nP m n en
(3)
Note, this distribution has an envelope that follows a normal Gaussian distribution for a
continuous variable where the variance σ2 is proportional to the number of steps n.
To express this with a time variable, we instead insert n = t/Δt and m = x/Δx in eq. (3) to obtain
the discrete probability distribution function:
2
2( , ) exp
2 2 ( )
xP x t
t t x
t t
Note that we can re-write this discrete probability distribution similar to the continuum diffusion
solution
2
24( )
( , )4
x Dtx
P x t eDt (4)
if we equate the variance and diffusion constant as
4. M. Daune, Molecular Biophysics: Structures in Motion. (Oxford University Press, New York, 1999), Ch. 7.

6
2( )
2
x
Dt
Equation (4) is slightly different because P is a unitless probability for finding the particle
between x and x+Δx, rather than a continuous probability density ρ with units of m-1: ρ(x,t) dx =
P(x,t). Even so, eq. (4) suggests that the time-dependent probability distribution function for the
random walk obeys a diffusion equation
2 2
2 2
P P
x D or Dt x t x (5)
Three‐Dimensional Random Walk
We can extend this treatment to diffusion from a point source in three dimensions, by using a
random walk of n steps of length Δx on a 3D cubic lattice. The steps are divided into those taken
in the x, y, and z directions:
x y zn n n n
and distance of the walker from the origin is obtained from the net displacement along the x, y,
and z axes:
2 2 2 1/2( ) r x y z m x 2 2 2 x y zm m m m
For each time-interval the walker takes a step choosing the positive or negative direction along
the x, y, and z axes with equal probability. Since each dimension is independent of the others
( , ) ( , ) ( , ) ( , )x x y y z zP r n P m n P m n P m n
Looking at the radial displacement from the origin, we find
2 2 2 2x y z r
where
22 ( )
2
x x
x tD t
t
but since each dimension is equally probable 2 23r x . Then using eq. (3)
2 23/22
23 23
( , )2
r
r
rxP r t e
where 2 6 r Dt .

7
Markov Chain and Stochastic Processes5
Working again with the same problem in one dimension, let’s try and write an equation of
motion for the random walk probability distribution: P(x,t).
This is an example of a stochastic process, in which the evolution of a system in time and
space has a random variable that needs to be treated statistically.
As above, the movement of a walker only depends on the position where it is at, and not
on any preceding steps. When the system has no memory of where it was earlier, we call
it a Markovian system.
Generally speaking, there are many flavors of a stochastic problem in which you describe
the probability of being at a position x at time t, and these can be categorized by whether
x and t are treated as continuous or discrete variables. The class of problem we are
discussing with discrete x and t points is known as a Markov Chain. The case where
space is treated discretely and time continuously results in a Master Equation, whereas a
Langevin equation or Fokker–Planck equation describes the case of continuous x and t.
To describe the walkers time-dependence, we relate the probability distribution at one
point in time, P(x,t+Δt), to the probability distribution for the preceding time step, P(x,t)
in terms of the probabilities of a walker making a step to the right ( P ) or to the left ( P )
during the interval Δt. Note, when P P , there is a stepping bias in the system. If
1P P , there is a resistance to stepping either as a result of an energy barrier or
excluded volume on the chain.
In addition to the loss of probability by stepping away from x to the left or right, we need
to account for the steps from adjacent sites that end at x.
Then the probability of observing the particle at position x during the interval Δt is:
( , ) ( , ) ( , ) ( , ) ( , ) ( , )
(1 ) ( , ) ( , ) ( , )
( , ) [ ( , ) ( , )] [ ( , ) ( , )]
P x t t P x t P P x t P P x t P P x t P P x t
P P P x t P P x t P P x
x x
x x
x x
t
P x t P P x t P x t P P x t P x t
5. A. Nitzan, Chemical Dynamics in Condensed Phases: Relaxation, Transfer and Reactions in Condensed
Molecular Systems. (Oxford University Press, New York, 2006).

8
and the net change probability is
( , ) ( , ) [ ( , ) ( , )] [ ( , ) ( , )] x xP x t t P x t P P x t P x t P P x t P x t
We can cast this as a time-derivative if we divide the change of probability by the time-
step Δt:
( , ) ( , )
[ ( , ) ( , )] [ ( , ) ( , )]
( , ) ( , )
P P x t t P x t
t t
P P x t P x t P P x t P xx x t
P P x t P P x t (6)
Where / P P t is the right and left stepping rate, and ( , ) ( , ) ( , ) P x t P x t P x tx
We would like to show that this random walk model results in a diffusion equation for the
probability density ρ(x,t) we deduced in eq. (5). To simplify, we assume that the left and
right stepping probabilities 12 P P , and substitute
P(x,t) = ρ(x,t) dx
into eq. (6):
[ ( , ) 2 ( , ) ( , )]
P x t x x xt tx
t
where 1 / 2 P t . We then expand these probability density terms in x as
22
2
1( , ) (0, )
2
x t t x x
x x
and find that the probability density follows a diffusion equation
2
2
D
t x
where 2 / 2 D x t .

9
Fluorescence Correlation Spectroscopy6
Fluorescence correlation spectroscopy (FCS) allows one to measure diffusive properties of
fluorescent molecules, and is closely related to FRAP. Instead of measuring time-dependent
concentration profiles and modeling the kinetics as continuum diffusion, FCS follows the steady
state fluctuations in number density of a very dilute fluorescent probe molecule in the small
volume observed in a confocal microscope. We measure the fluctuating changes in fluorescence
intensity emitted from probe molecules as they diffuse into and out of the focal volume.
Average concentration of sample: C0 = <10–9 M – 10–7 M.
This corresponds to an average of ~0.1-100 molecules in the focal volume, although this
number varies with diffusion into and out of the volume.
The fluctuating fluorescence trajectory is proportional to the time-dependent number
density or concentration:
( ) ( )F t C t
How big are the fluctuations? For a Gaussian random process, we expect 1
~rmsN
N N
The observed concentration at any point in time can be expressed as time-dependent
fluctuations about an average value: C t C C t .
To describe the experimental observable, we model the time-dependence of δC(t) from the
diffusion equation:
6. P. Schwille and E. Haustein, "Fluorescence Correlation Spectroscopy: An Introduction to its Concepts and
Applications" in Biophysics Textbook Online.

10
2CD C
t
2( ) 40
3/2( ,0) ( , )
(4 )r r DtC
eC r C r tDt
The concentration fluctuations can be related to the fluorescence intensity fluctuations as
( ) ( ) ( , )F t A W r C r t W(r): Spatial optical profile of excitation and detection A: Other experimental excitation and detection parameters
Calculate FCS correlation function for fluorescence intensity fluctuations. ( ) ( ) F t F F t
2
(0) ( )( )
F F tG t
F
For the case of a Gaussian beam with a waist size w0:
( ) ~1 FCS
BG t
t
Where the amplitude is 2 2 2 20 0 04B A I C w , and the correlation time is related to the diffusion
constant by:
20
4FCS
w
D

11
Orientational Diffusion
The concepts we developed for translation diffusion and Brownian motion are readily extended
to rotational diffusion. For continuum diffusion, if one often assumes that one can separate the
particle probability density into a radial and angular part: ( , , ) ( ) ( , )P r P r P . Then one also
separate the diffusion equation into two parts for which the orientational diffusion follows a
small-angle diffusion equation
P(,t)
t D
or2 P(,t) (7)
where refers to the spherical coordinates (θ,ϕ). Dor is the orientational diffusion constant with
units of rad2 s–1. Microscopically, one can consider orientational
diffusion as a random walk on the surface of a sphere, with steps being
small angular displacements in θ and ϕ. Equation (7) allows us to obtain
the time-dependent probability distribution function P(Ω,t|Ω0) that
describes the distribution of directions Ω at time t, given that the vector
had the orientation Ω0 at time t = 0. This can be expressed as an
expansion in spherical harmonics
0 00
*, | m m m
m
P t c t Y Y
The expansion coefficients are given by
exp 1morc t D t
Readings
1. H. C. Berg, Random Walks in Biology. (Princeton University Press, Princeton, N.J., 1993).
2. R. Phillips, J. Kondev, J. Theriot and H. Garcia, Physical Biology of the Cell, 2nd ed. (Taylor
& Francis Group, New York, 2012).

Diffusion
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 04/24/2018
12. Diffusion in a Potential In this section, we extend the concepts of diffusion and Brownian motion into a regime where
the time-evolution is not entirely random, but includes a driving force. We will refer to this class
of problems as diffusion in a potential, although it is also referred to as diffusion with drift,
diffusion in a velocity or force field, or diffusion in the presence of an external force. We will see
that these problems can be related to a biased random walk or to motion of a Brownian particle
subject to an internal or external potential. Our discussion below will be confined to problems
involving diffusion in one dimension.
The common theme is that we account for transport of particles through a surface in terms of two
sources of flux, the diffusive flux and an additional driven contribution that arises from a
potential, field, or external force experienced by the particle:
dif UfJ J J (1)
Here we label the second flux component with U to signify potential. This may be a result of an
external force acting on a diffusing system (for instance, electrophoresis and sedimentation), or
the bias that results from interactions between diffusing particles. In mass transport through fluid
flow the second term is known as the advective flux, JU → Jadv.

2
Diffusion with Drift
If diffusion occurs within a moving fluid, the time-dependent concentration profiles will be
influenced by the local velocity of the fluid, or drift velocity vx. The net advective flux density
for the concentration passing through an area per unit time is then
adv xJ v C (2)
So that the total flux according to eq. (1) is
J DC
x v
xC (3)
Now using the continuity expression C t J x , and assuming a constant drift velocity the
diffusion coefficient is1
2
2 x
C C CD v
t x x
(3)
This equation is the same as the normal diffusion equation in the inertial frame of reference. If
we shift to a frame moving at vx, we can define the relative displacement
– xx x v t
Remember, C is a function of x and t, and expressing eq. (3) in terms of x via the chain rule, we
find that we can recast it as the simple diffusion equation:
2
2
C C
t xD
Then the solution for diffusion from a point source becomes
2 41
,4
DtxC etD
xt
2( ) 41
,4
xx v t DtC x tDt
e
So the peak of the distribution moves as ⟨x⟩ = vxt and the width grows as
σ = [⟨x2⟩ ‒ ⟨x⟩2]1/2 = (2Dt)1/2.
Let’s consider the relative magnitude of the diffusive and drift velocity contributions to the
motion of a protein in water. A typical diffusion constant is 10−6 cm2/s, meaning that the root
mean square displacement in a one microsecond time period is 14 nm. If we compare this with
the typical velocity of blood in capillaries, v = 0.3 mm/s, in the same microsecond the same
1 In three dimensions: J(r, t) DC(r, t) vC(r, t) and .

3
protein is pushed ⟨x⟩ = 0.3 nm. For this example, diffusion dominates the transport process on
the nanometer scale, however, with the increase of time scale and transport distance, the drift
term will grow in significance due to the t1/2 scaling of diffusive transport.
Péclet Number
The Péclet number Pe is a unitless number used in continuum hydrodynamics to characterize
the relative importance of diffusive transport and advective transport processes. Language note:
Convection: internal currents within fluid
Advection: mass transport due to convection
We characterize this with a ratio of the rates or equivalently the characteristic time scale for
transport with these processes:
Pe
advective flux (Jadv
)
diffusive flux (Jdiff
)
diffusion timescale(tdiff
)
advection timescale(tadv
)
Limits
Pe ≪ 1 Diffusion dominated. In this limit, diffusive transport spreads the
concentration profile symmetrically about the maximum as illustrated above.
Pe ≫ 1 Flow dominated. Effectively no spreading to concentration; it is just carried
along with the flow.
If we define a characteristic transport length d and the flow velocity v, then
adv d
tv
Given a diffusion constant D, the diffusive time-scale is taken to be 2
diff d
tD
So that
e
vdP
D

4
Biased Random Walk
The diffusion with drift equation can be obtained from a biased random walk problem. To
illustrate, we extend the earlier description of a walker on a 1D lattice that can step left or right
by an amount distance Δx for every time interval Δt. However, in this case there is unequal
probability of stepping right (+) or left (–) during Δt: P P . Probabilistically speaking, the
change in position for a given time interval can be expressed as
x t t x t xP x P
x t x P P
(4)
We see that the average position of random walkers depends on the difference in left and right
stepping rates. To help link stepping with time, we define rate constants for stepping left or right,
P
kt
(5)
with –k k . Then eq. (4) can be written as
( )( )
( ) x
k k t xx x tt t
v tx t
(6)
where the drift velocity is related to the difference in hopping rates
xv k k x
Expressing eq. (6) as the result of many steps says that the mean of the position distribution
behaves like traditional linear motion: ⟨x(t)⟩ = x0 + vxt.
What about the variance in the distribution? Calculating the mean-square value of x from eq. (4)
gives
22 2 2 2
22
( ) 2 ( )
2 ( )( ) x
x x t x t k x t x tk kt t
v t x tk kx tx t
(7)
where we used (k+ + k–)∆t = 1.
Using this to calculate the variance in x: σ2(t)=(k+ + k–)∆x2t, and then comparing with ⟨x2⟩1/2 =
2Dt, leads to the conclusion that the breadth of the distribution σ spreads as it would in the
absence of a drift velocity, and the diffusion coefficient for this biased random walk is given by
21
2D xk k
When the left and right stepping rates are the same, we recover our earlier result 2D = ∆x2/∆t.

5
Diffusion in a Potential
Fokker–Planck Equation
Diffusion with drift or diffusion in a velocity field is closely related to diffusion of a particle
under the influence of an external force f or potential U.
( )
U
f xx
When random forces on a particle dominate the inertial ones, we can equate the drift velocity and
external force through the friction coefficient
mx ( )d rf f t ext
d x
ext x
f
f v
f v
xf v (8)
and therefore the contribution of the force or potential to the total flux is
U x
f C UJ v C C
x (9)
The Fokker–Planck equation refers to stochastic equations of motion for the continuous
probability density ( , ) x t with units of m−1. The corresponding continuity expression for the
probability density is
j
t x
where j is the flux, or probability current, with units of s–1, rather than the flux density we used
for continuum diffusion J (m−2 s−1). If the concentration flux is instead expressed in terms of a
probability density eq. (3) becomes
f x
j Dx
(10)
and the continuity expression is used to obtain the time-evolution of the probability density:
2
2
f xD
t x x (11)
This is known as a Fokker–Planck equation.

6
Smoluchowski Equation
Similarly, we can express diffusion in the presence of an internal interaction potential U(x) using
eq. (9) and the Einstein relation
Bk T
D (12)
Then the total flux with contributions from the diffusive flux and potential flux can be written as
B
C DC UJ D
x k T x
(13)
and the corresponding diffusion equation is
2
2B
C C C UD
t x x k T x
(14)
This is known as the Smoluchowski Equation.
Linear Potential
For the case of a linear external potential, we can write the potential in terms of a constant
external force U fext
x . This makes eq. (14) identical to eq. (3), if we use eqs. (8) and (12) to
define the drift velocity as
ext
xB
f Dv f D
k T
C
J D f DCx
Here I defined f
as the constant external force expressed in units of kBT.
The probability distribution that describes the position of particles released at x0 after a time t is
2
01, exp
44
x x f DtP x t
DtDt
As expected, the mean position of the diffusing particle is given by ⟨x(t)⟩ = x0 + vxt.
To make use of this, let’s calculate the time it takes a monovalent ion to diffuse freely across the
width of a membrane (d) under the influence of a linear electrostatic potential of Φ = 0.3V. With
U = eΦ
ext
2B
x
Bd k Td k Tt
d
f D Dv e

7
Using d = 4 nm, D = 10−5 cm2/s, and e = 1.6×10−19 C, we obtain t = 1.4 ns.
Steady‐State Solutions
For steady-state solutions to the Fokker–Planck or Smoluchowski equations, we can make use of
a commonly used mathematical manipulation. As an example, let’s work with eq. (10), re-
writing it as
B
Uj D
x k T x (15)
We can rewrite the quantity in brackets as:
( ) ( ) B BU x k T U x k Td
e edx
Separating variables, we obtain
( ) ( ) B BU x k T U x k Tje dx d e
D
This is an expression that can be manipulated in various ways and integrated over different
boundary conditions.2 For instance, recognizing that j is a constant under steady state conditions,
and integrating from x to a boundary b:
( ) ( )
( ) ( )( ) ( )
B B
B B
b bU x k T U x k T
x x
U b k T U x k T
je dx d e
D
b e x e
This leads one to an important expression for the steady state flux in the diffusive limit:
( ) ( )
( )
( ) ( )
B B
B
U b k T U x k T
b U x k T
x
D b e x ej
e dx
The boundary chosen depends on the problem, for instance b is set to infinity in diffusion to
capture problems or set as a fixed boundary for first-passage time problems.
For problems involving an absorbing boundary condition, ρ(b) = 0, and we can solve for the
probability density as
( ) ( )( ) B BbU x k T U x k T
x
jx e e dx
D
2. The general three-dimensional expression is ( ) ( )( , ) D [ ( , )] B BU k T U k Tt e e tr rJ r r .

8
If we integrate both sides of this expression over the entire space, the left hand side is just unity,
so we can express the steady-state flux as
1( ) ( )1
0
B Bb bU x k T U x k T
xj D e e dx dx

Diffusion
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 04/18/2018
13. Friction and the Langevin Equation Now let’s relate the phenomena of Brownian motion and diffusion to the concept of friction, i.e.,
the resistance to movement that the particle in the fluid experiences. These concepts were
developed by Einstein in the case of microscopic motion under thermal excitation, and
macroscopically by George Stokes who was the father of hydrodynamic theory.
Langevin Equation
Consider the forces acting on a particle as we pull it through a fluid.
We pull the particle with an external force fext, which is opposed by a
drag force from the fluid, fd. The drag or damping acts as resistance to
motion of the particle, which results from trying to move the fluid out
of the way.
df v ζ (kg/s)
A drag force requires movement, so it is proportional to the velocity of the particle /v dx dt x and the friction coefficient is the proportionality constant that describes the magnitude of the
damping. Newton’s second law relates the acceleration of this particle is to the sum of these forces:
extdma f f .
Now microscopically, we also recognize that there are time-
dependent random forces that the molecules of the fluid exert on a
molecule (fr). So that the specific molecular details of solute–solvent
collisions can be averaged over, it is useful to think about a nanoscale
solute in water (e.g., biological macromolecules) with dimensions
large enough that its position is simultaneously influenced by many
solvent molecules, but is also light enough that the constant
interactions with the solvent leave an unbalanced force acting on the solute at any moment in time:
( ) ( )r iif t f t . Then Newton’s second law is d ext rma f f f t .
The drag force is present regardless of whether an external force is present, so in the absence of
external forces (fext=0) the equation of motion governing the spontaneous fluctuations of this solute
is determined from the forces due to drag and the random fluctuations:
d rma f f t (1)
( ) 0rmx x f t (2)

2
This equation of motion is the Langevin equation. An equation of motion such as this that includes
a time-dependent random force is known as “stochastic”.
Inserting a random process into a deterministic equation means that we need to use a statistical
approach to solve this equation. We will be looking to describe the average and root-mean-squared
position of the particle. First, what can we say about the random force? Although there may be
momentary imbalances, on average the perturbations from the solvent on a larger particle will
average to zero at equilibrium:
( ) 0rf t (3)
Equation (1) seems to imply that the drag force and the random force are independent, but in fact
they originate in the same molecular forces. If the molecule of interest is a protein that experiences
the fluctuations of many rapidly moving solvent molecules, then the averaged forces due to random
fluctuations and the drag forces are related. The fluctuation–dissipation theorem is the general
relationship that relates the friction to the correlation function for the random force. In the
Markovian limit this is
( ) ( ) 2 ( )r r Bf t f t k T t t (4)
or 2
2r
B
f
k T
Markovian indicates that no correlation exists between the random force for |t‒t′| > 0. More
generally, we can recover the friction coefficient from the integral over the correlation function
for the random force
1(0) ( )
2 R RB
dt f f tk T
To describe the time evolution of the position of our protein molecule, we would like to obtain an
expression for mean-square displacement ⟨x2(t)⟩. The position of the molecule can be described by
integrating over its time-dependent velocity: 0
( ) ( )t
x t dt x t , so we can express the mean-square
displacement in terms of the velocity autocorrelation function
2
0 0( ) ( ) ( )
t tx t dt dt x t x t (5)
Our approach to obtaining ⟨x2(t)⟩ starts by multiplying eq. (2) by x and then ensemble averaging.
( ) 0r
dm x x xx x f t
dt (6)
From eq. (3), the last term is zero, and from the chain rule we know

3
( )d d dx
xx x x xdt dt dt
(7)
Therefore, we can write eq. (6) as
0d
m xx xx xxdt
(8)
Further, the equipartition theorem states that for each translational degree of freedom the kinetic
energy is partitioned as
21
2 2Bk T
m x (9)
So, B
dm xx xx k T
dt (10)
Here we are describing motion in 1D, but when fluctuations and displacement are included for 3D
motion, then we switch x → r and Bk T →3 Bk T . Integrating eq. (10) twice with respect to time, and
using the initial condition x(0) = 0, we obtain
22
exp 1Bk T mt tx
m
(11)
in 3D: 26
exp 1Bk T mt tr
m
To investigate eq. (11), let’s consider two limiting cases. We see that m/ζ has units of time, and so
we define the relaxation time
/C m (12)
and investigate time scale short and long compared to τC:
1) For Ct , we can expand the exponential in eq. (11) and retain the first three terms, which
leads to
2 2 2 2Bk Tx t v t
m (short time: inertial) (13)
2) For Ct , eq. (11) is dominated by the leading term:
22 Bk T
tx (long time: diffusive) (14)

4
In the diffusive limit the behavior of the molecule is governed entirely by the fluid, and its
mass does not matter. The diffusive limit in a stochastic equation of motion is equivalent
to setting m → 0.
We see that τC is a time-scale separating motion in the inertial and diffusive limits. It is a correlation
time for the randomization of the velocity of the particle due to the random fluctuations of the
environment.
For very little friction or short time, the particle moves with traditional deterministic motion xrms
= vrms t, where root-mean-square displacement xrms = ⟨x2⟩1/2 and vrms comes from the average
translational kinetic energy of the particle. For high-friction or long times, we see diffusive
behavior with xrms~t1/2. Furthermore, by comparing eq. (14) to our earlier continuum result, ⟨x2⟩ =
2Dt, we see that the diffusion constant can be related to the friction coefficient by
Bk TD
(in 1D) (15)
This is the Einstein formula. For 3D problems, we replace kBT with 3kBT in the expressions above
and find D3D = 3kBT/
CB
m mD
k T (in 1D)
How long does it take to approach the diffusive regime? Very fast. Consider a 100 kDa protein
with R = 3 nm in water at T = 300 K, we find a characteristic correlation time for randomizing
velocities of τC 123 10 s , which corresponds to a distance of about 10–2 nm before the onset of
diffusive behavior.
We can find other relationships. Noting the relationship of ⟨x2⟩ to the velocity autocorrelation
function in eq. (5), we find that the particle velocity is described by

5
2 2 //(0) ( ) Cx x xx x
tt mv v t v xv ve e
which can be integrated over time to obtain the diffusion constant.
0
(0) ( ) Bx x
k Tv v t dt D
(16)
This expression is the Green–Kubo relationship. This is a practical way of analyzing molecular
trajectories in simulations or using particle-tracking experiments to quantify diffusion constants or
friction coefficients.

6
Brownian Dynamics
The Langevin equation for the motion of a Brownian particle can be modified to account for an
additional external force, in addition to the drag force and random force. From Newton’s Second
Law:
( ) ( )d r extmx f f t f t
where the added force is obtained from the gradient of the potential it experiences:
fext
Ux
(17)
With the fluctuation-dissipation relation ( ) ( ) 2 ( )r r Bf t f t k T t t , the Langevin equation
becomes
( / ) 2 ( ) 0Bmx U x x k T R t (18)
Here R(t) refers to a Gaussian distributed sequence of random numbers with ⟨R(t)⟩ = 0 and ⟨R(t)
R(t′)⟩ = δ(t ‒ t′).
Brownian dynamics simulations are performed using this equation of motion in the diffusion-
dominated, or strong friction limit | | | |mx x . Then, we can neglect inertial motion, and set the
acceleration of the particle to zero to obtain an expression for the velocity of the particle
( ) ( / ) / 2 / ( )Bx t U x k T R t
We then integrate this equation of motion in the presence of random perturbations to determine
the dynamics x(t).
Readings
1. R. Zwanzig, Nonequilibrium Statistical Mechanics. (Oxford University Press, New York,
2001).
2. B. J. Berne and R. Pecora, Dynamic Light Scattering: With Applications to Chemistry, Biology,
and Physics. (Wiley, New York, 1976).

Transport
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 08/04/2018
14. Hydrodynamics
Diffusion equations, random walks, and the Langevin equation are useful for describing
transport driven by random thermal forces under equilibrium conditions or not far from
equilibrium (the linear response regime).
Fluid Dynamics and hydrodynamics refer to continuum approaches that allows us to
describe non-equilibrium conditions for transport in fluids. Hydrodynamics describes flow
and transport of objects through a fluid experiencing resistance or friction.
Newtonian Fluids
Fluids described through continuum mechanics.
o Stress: Force applied to an object. Stress is force applied over a surface area, a.
Force has normal (z) and parallel components (x).
o The stress can be decomposed it into the normal component perpendicular to the
surface /zf a
, and the sheer stress parallel to the surface /xf a
.
o Strain: The deformation (change in dimension) of object as a result of the stress.
Solids
o A solid is considered Newtonian if its behavior follows a linear relationship
between elastic stress and strain, i.e. Hooke’s Law.
o Solids are stiff and will return to their original configuration when stressed, but
can’t deform far (without rupture).
Fluids
o Fluids cannot support a strain and remain at equilibrium. Conservation of
momentum dictates that application of a force will induce a flow.
o Fluids resist flow (viscous flow).
o Newtonian fluids follow a linear relation between shear stress and the strain rate.
Viscosity
Viscosity measures the resistance to shear forces. A fluid is placed between two plates of area a
separated along z, and one plate is moved relative to the other by applying a shear force along x.
At contact, the velocity of the fluid at the interface with either plate is equal to the velocity of the
plate as a result of intermolecular interactions: ( 0) 0xv z
. This is known as the no-slip
boundary condition. The movement of one plate with respect to the other sets up a velocity gradient
along z. This velocity gradient is equal to the strain rate.
The relationship between the shear velocity gradient and the force is

2
xx
dvf a
dz
where η, the dynamic viscosity (kg m−1 s−1), is the proportionality factor. For water at 25°C, the
dynamic viscosity is η = 8.9×10–3 Pa s.
Stresses in a Dense Particle Fluid
A normal stress is a pressure (force per unit area), and these forces are transmitted through a fluid
as a result of the conservation of momentum in an incompressible medium. This force transduction
also means that a stress applied in one direction can induce a strain in another, i.e. a stress tensor
is needed to describe the proportionality between the stress and strain vectors.
In an anisotropic particulate system, force transmission from one region of the fluid to another
results from “force chains” involving steaming motion of particles that repel each other. These
force chains are not simply unidirectional, but also branch into networks that bypass unaffected
regions of the system.
Adapted from National Science Foundation, “Granular Materials”, June 15, 2012. Copyright 2012 National Science Foundation. https://www.youtube.com/watch?v=R7g6wdmYB78

3
Stokes’ Law
How is a fluid’s macroscopic resistance to flow related to microscopic friction originating in
random forces between the fluid’s molecules? In discussing the Langevin equation, we noted that
the friction coefficient was the proportionality constant between the drag force experienced by
an object and its velocity through the fluid: df v . Since this drag force is equal and opposite
to the stress exerted on an object as it moves through a fluid, there is a relationship of the drag
force to the fluid viscosity. Specifically, we can show that Einstein’s friction coefficient ζ is related
to the dynamic viscosity of the fluid , as well as other factors describing the size and shape of
the object (but not its mass).
This connection is possible as a result of George Stokes’
description of the fluid velocity field around a sphere moving
through a viscous fluid at a constant velocity. He considered a
sphere of radius R moving through a fluid with laminar flow: that
in which the fluid exhibits smooth parallel velocity profiles
without lateral mixing. Under those conditions, and no-slip
boundary conditions, one finds that the drag force on a sphere is
6d hf R v
and viscous force per unit area is entirely uniform across the surface of the sphere. This gives us
Stokes’ Law
6 hR (1)
Here hR is referred to as the hydrodynamic radius of the sphere, the radius at which one can apply
the no-slip boundary condition, but which on a molecular scale may include water that is strongly
bound to the molecule. Combining eq. (1) with the Einstein formula for diffusion coefficient, D =
kBT/gives the Stokes–Einstein relationship for the translation diffusion constant of a sphere1
trans 6B
h
k TD
R (2)
One can obtain a similar a Stokes–Einstein relationship for orientational diffusion of a sphere in a
viscous fluid. Relating the orientational diffusion constant and the drag force that arises from
resistance to shear, one obtains
rot 6B
h
k TD
V
1. B. J. Berne and R. Pecora, Dynamic Light Scattering: With Applications to Chemistry, Biology, and Physics.
(Wiley, New York, 1976), pp. 78, 91.

4
Laminar and Turbulent Flow
Laminar flow: Fluid travels in smooth parallel lines without lateral mixing.
Turbulent flow: Flow velocity field is unstable, with vortices that dissipate kinetic energy
of fluid more rapidly than laminar regime.
Reynolds Number
The Reynolds number is a dimensionless number is used to indicate whether flow conditions are
in the laminar or turbulent regimes. It indicates whether the motion of a particle in a fluid is
dominated by inertial or viscous forces.2
inertial forces
viscous forcesR
When 1R , the particle moves freely, experiencing only weak resistance to its motion by the
fluid. If 1R , it is dominated by the resistance and internal forces of the fluid. For the latter case,
we can consider the limit m → 0 in eq. Error! Reference source not found., and find that the
velocity of the particle is proportional to the random fluctuations: ( ) ( ) /rv t f t .
We can also express the Reynolds number in other forms:
In terms of the fluid velocity flow properties: 2 2
( / )
( / )
v dv dz
d v dz
R
In terms of the Langevin variables: /in df fR .
Hydrodynamically, for a sphere of radius r moving through a fluid with dynamic viscosity η and
density ρ at velocity v,
rv
R
Consider for an object with radius 1 cm moving at 10 cm/s through water: 310R . Now compare
to a protein with radius 1 nm moving at 10 m/s: 2=10R .
2. E. M. Purcell, Life at low Reynolds number, Am. J. Phys. 45, 3–11 (1977).

5
Drag Force in Hydrodynamics
The drag force on an object is determined by the force required to displace the fluid against the
direction of flow. A sphere, rod, or cube with the same mass and surface area will respond
differently to flow. Empirically, the drag force on an object can be expressed as
21
2d df C v a
This expression takes the form of a pressure (term in brackets) exerted on the cross-sectional area
of the object along the direction of flow, a. Cd is the drag coefficient, a dimensionless
proportionality constant that depends on the shape of the object. In the case of a sphere of radius
r: a = πr2 in the turbulent flow regime ( 1000R ) Cd = 0.44–0.47. Determination of Cd is
somewhat empirical since it depends on R and the type of flow around the sphere.
The drag coefficient for a sphere in the viscous/laminar/Stokes flow regimes ( R <1) is
24 /dC R . This comes from using the Stokes Law for the drag force on a sphere 6df vr
and the Reynolds number vd R .
Reprinted with permission from Bernard de Go Mars, Drag coefficient of a sphere as a function of Reynolds number, CC BY-SA 3.0.

Transport
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 08/04/2018
15. Passive Transport Passive transport is often synonymous with diffusion, where thermal energy is the only source of
motion.
2 1/2( ) 0 ( ) 6 rmsr t r t Dt r t
In biological systems, diffusive transport may work
on a short scale, but it is not effective for long-range
transport. Consider:
r21/2 for small protein moving in water ~10 nm →10–7 s ~10 μm → 10–1 s
Active transport refers to directed motion:
( )r t v t r t
This requires an input of energy into the system, however, we must still deal with random
thermal fluctuations.
How do you speed up transport?
We will discuss these possibilities:
Reduce dimensionality: Facilitated diffusion
Free energy (chemical potential) gradient: Diffusion in a potential
Directional: Requires input of energy, which drives the switching between two
conformational states of the moving particle tied to translation.
x
t
Diffusive
Directed

2
Dimensionality Reduction
One approach that does not require energy input works by recognizing that displacement is faster
in systems with reduced dimensionality. Let’s think about the time it takes to diffusively
encounter a small fixed target in a large volume, and how this depends on the dimensionality of
the search. We will look at the mean first passage time to find a small target with radius b
centered in a spherical volume with radius R, where R ≫ b. If the molecules are initially
uniformly distributed within the volume the average time it takes for them to encounter the target
(i.e., MFPT) is1
2
33
2
22
2
11
3
ln2
3
D
D
D
R RR b
D b
R RR b
D b
R
D
Here Dn is the diffusion constants in n dimensions (cm2/sec). If we assume that the magnitude of
D does not vary much with n, the leading terms in these expressions are about equal, and the big
differences are in the last factor
3 2 1
ln 1
D D D
R R
b b
Based on the volume that needs searching, there can be a tremendous advantage to lowering the
dimensionality.
1. O. G. Berg and P. H. von Hippel, Diffusion-controlled macromolecular interactions, Annu. Rev. Biophys.
Biophys. Chem. 14, 131-158 (1985); H. C. Berg and E. M. Purcell, Physics of chemoreception, Biophys. J. 20, 193-219 (1977).
R2b

3
Facilitated Diffusion2
Facilitated diffusion is a type of dimensionality reduction that has been used to describe the
motion of transcription factors and regulatory proteins looking for their binding target on DNA.
E. coli Lac Repressor
Experiments by Riggs et al. showed that E. coli Lac repressor finds its binding site about one
hundred times faster than expected by 3D diffusion.3 They measured ka=7×109 M−1 s−1, which is
100–1000 times faster than typical rates. The calculated diffusion-limited association rate from
the Smoluchowski equation is ka≈108 M−1 s−1 using estimated values of D≈5×10−7 cm2 s−1 and
R≈5×10−8 cm. Berg and von Hippel theoretically described the possible ways in which
nonspecific binding to DNA enabled more efficient one-dimensional motion coupled to three-
dimensional transport.4
Many Possibilities for Locating Targets Diffusively: Coupled 1D + 3D Diffusion
1) Sliding (1D diffusion along chain as a result of nonspecific interaction)
2) Microhop (local translocation with free diffusion)
3) Macrohop (...to distal segment via free diffusion)
4) Intersegmental transfer at crossing—varies with DNA dynamics
2. P. H. von Hippel and O. G. Berg, Facilitated target location in biological systems, J. Biol. Chem. 264 (2), 675–
678 (1989).
3. A. D. Riggs, S. Bourgeois and M. Cohn, The lac represser-operator interaction, J. Mol. Biol. 53 (3), 401–417 (1970); Y. M. Wang, R. H. Austin and E. C. Cox, Single molecule measurements of repressor protein 1D diffusion on DNA, Phys. Rev. Lett. 97 (4), 048302 (2006).
4. O. G. Berg, R. B. Winter and P. H. Von Hippel, Diffusion-driven mechanisms of protein translocation on nucleic acids. 1. Models and theory, Biochemistry 20 (24), 6929–6948 (1981).

4
Consider Coupled Sliding and Diffusion: The Steady‐State Solution
The transcription factor diffuses in 1D along DNA with the objective of locating a specific
binding site. The association of the protein and DNA at all points is governed by a nonspecific
interaction. Sliding requires a balance of nonspecific attractive forces that are not too strong (or
the protein will not move) or too weak (or it will not stay bound). The nonspecific interaction is
governed by an equilibrium constant and exchange rates between the bound and free forms:
1
3
a a D
d d D
k
k
kKF B
k
We can also think of this equilibrium constant in terms of the average times spent diffusing in
1D or 3D. The protein stays bound for a period of time dictated by the dissociation rate kd. It can
then diffuse in 3D until reaching a contact with DNA again, at a point which may be short range
in distance but widely separated in sequence.
The target for the transcription factor search can be much larger that the physical size of the
binding sequence. Since the 1D sliding is the efficient route to finding the binding site, the target
size is effectively covered by the mean 1D diffusion length of the protein, that is, the average
distance over which the protein will diffuse in 1D before it dissociates. Since one can express the
average time that a protein remains bound as 1D = 1dk , the target will have DNA contour length
of
1/2
14*
d
DR
k
If the DNA is treated as an infinitely long cylinder with radius b, and the protein is considered to
have a uniform probability of nonspecifically associating with the entire surface of the DNA,
then one can solve for the steady-state solution for the diffusion equation, assuming a completely
absorbing target. The rate constant for specific binding to the target has been determined as
1
3
D K
D b

5
where K is the equilibrium constant for nonspecific binding per unit surface area of the cylinder
(M–1 cm–2 or cm). We can express the equilibrium constant per base-pair as 2K bK , where
is the length of a base pair along the contour of the DNA. The association rate will be given by
the product of bindk and the concentration of protein.

6
Search Times in Facilitated Diffusion5
Consider a series of repetitive 1D and 3D diffusion cycles. The search time for a protein to find
its target is
1D, 3D,
1
k
s i ii
t
where k is the number of cycles. If the genome has a length of M bases and the average number
of bases scanned per cycle is n , the average number of cycles k = M/n, and the average search
time can be written as
1D 3Ds
Mt
n (1)
is the mean search time during one cycle. If we assume that sliding occurs through normal 1D
diffusion, then we expect that 1D 1Dn D , where the diffusion constant is expressed in units of
bp2/s. More accurately, it is found that if you executed a random walk with an exponentially
weighted distribution of search times:
11D 1D 1D 1D
1D 1D
exp /
4
P
n D
1D 3D
1D 1D4s
Mt
D
Let’s calculate the optimal search time, topt. In the limits that 1 or 3 0 , you just have pure
1D or 3D diffusion, but this leads to suboptimal search times because a decrease in 1D or 3D
leads to an increase in the other. To find the minimum search time we solve:
1D
0st
and find that optt corresponds to the condition
1D 3D
Using this in eq. (1) we have
3Dopt 3D
1D
opt 1D 3D
2
4
Mt M
n D
n D
5. M. Slutsky and L. A. Mirny, Kinetics of protein-DNA interaction: Facilitated target location in sequence-
dependent potential, Biophys. J. 87 (6), 4021–4035 (2004); A. Tafvizi, L. A. Mirny and A. M. van Oijen, Dancing on DNA: Kinetic aspects of search processes on DNA, Chemphyschem 12 (8), 1481–1489 (2011).

7
Now let’s find out how much this 1D + 3D search process speeds up over the pure 1D or 3D
search.
3D only: 1D 0 1n leading to
t3D M
3D
Facilitated diffusion speeds up the search relative to pure 3D diffusion by a factor
proportional to the average number of bases searched during the 1D sliding.
3D
opt2s
t n
t
1D only: 3D 0 n M , and
2
1D1D
1D
1D 1Dopt
4
1
4s
Mt
D
t M M
t D n
Facilitated diffusion speeds up the search over pure 1D diffusion by a factor or M/n.
Example: Bacterial Genome
M 5 106 bp
n 200 500 bp
Optimal facilitated diffusion is ~102 faster than 3D
~104 faster than 1D
Energetics of Diffusion
What determines the diffusion coefficient for sliding and 1
? We need the non-specific protein
interaction to be strong enough that it doesn’t dissociate too rapidly, but also weak enough that it
can slide rapidly. To analyze this, we use a model in which the protein is diffusing on a
modulated energy landscape looking for a low energy binding site.

8
Model6
Assume each sequence can have different interaction with the protein.
Base pairs in binding patch contribute additively and independently to give a binding
energy En for each site, n.
Assume that the variation in the binding energies as a function of site follow Gaussian
random statistics, characterized by the average binding energy E and the surface
energy roughness .
The protein will attempt to move to an adjacent site at a frequency ν = Δτ-1. The rate of
jumping is the probability that the attempt is successful times ν, and depends on the
energy difference between adjacent sites, ΔE=En±1‒En. The rate is ν if ΔE<0, and νexp[‒
ΔE/kBT] for ΔE>0.
Calculating the mean first passage time to reach a target site at a distance of L base pairs from
the original position yields
2 2
1/22
7 /4( )21D
11
2
Bk T
B
L ek T
Which follows a diffusive form with a diffusion constant
6. M. Slutsky and L. A. Mirny, Kinetics of protein-DNA interaction: Facilitated target location in sequence-
dependent potential, Biophys. J. 87 (6), 4021–4035 (2004).

9
2 2
1/2227 /4( )
1D1D
1 11
2 2 2
Bk T
B
LD e
k T (2)
Using this to find conditions for the fastest search time:
3Dopt 1D 3D 1D 3D
1D
16
2 4
opt
Mt n D
D
Speed vs Stability Paradox
Speed: Fast speed fast search in 1D. From eq. (2), we see that
2
1D exp
B
Dk T
(3)
With this strong dependence on σ, effective sliding with proper n requires
2kBT
Stability: On the other hand, we need to remain stably bound for proper recognition and activity.
To estimate we argue that we want the equilibrium probability of having the protein bound at the
target site be eq 0.25P . If E0 is minimum energy of the binding site, and the probability of
occupying the binding site is the following. First we can estimate that
E0 2 log M
which suggests that for adequate binding:
5kBT
Proposed Two‐State Sliding Mechanism
To account for these differences, a model has been proposed:
While 1D sliding, protein is constantly switching between two states, the search and
recognize conformations: . S binds loosely and allows fast diffusion, whereas R
interacts more strongly such that σ increases in the R state.
These fast conformational transitions must have a rate faster than
n
1D
~ 104 s1
Other criteria:
R S
R S
E E

10
Diffusion on rough energy landscape
The observation in eq. (3), relating the roughness of an energy landscape to an effective diffusion
rate is quite general.7 If we are diffusing over a distance long enough that the corrugation of the
energy landscape looks like Gaussian random noise with a standard deviation σ, we expect the
effective diffusion coefficient to scale as
2
0 exp
effB
D Dk T
(4)
where D0 is the diffusion constant in the absence of the energy roughness.
Single‐Molecule Experiments
To now there still is no definitive evidence for coupled 1D + 3D transport, although there is a lot
of data now showing 1D sliding. These studies used flow to stretch DNA and followed the
position of fluorescently labelled proteins as they diffused along the DNA.
Austin: Lac Repression follow up observed D1D varies by many orders of magnitude.8 2 5 2
1D :10 -10 nm /s
500nmD
n
Blainey and Xie: hOGG1 DNA repair protein:9
7. R. Zwanzig, Diffusion in a rough potential, Proc. Natl. Acad. Sci. U. S. A. 85 (7), 2029 (1988).
8. Y. M. Wang, R. H. Austin and E. C. Cox, Single molecule measurements of repressor protein 1D diffusion on DNA, Phys. Rev. Lett. 97 (4), 048302 (2006).
Reprinted from M. Slutsky and L. A. Mirny, Kinetics of protein-DNA interaction: Facilitated target location in sequence-dependent potential, Biophys. J. 87 (6), 4021–4035 (2004), with permission from Elsevier.

11
†slide
6 21D
0.5 kcal/mol
5 10 bp /s
440 bp
BG k T
D
n
D1D106 107 bp2 /s 101 100 m2 /s
9. P. C. Blainey, A. M. van Oijen, A. Banerjee, G. L. Verdine and X. S. Xie, A base-excision DNA-repair protein
finds intrahelical lesion bases by fast sliding in contact with DNA, Proc. Natl. Acad. Sci. U. S. A. 103 (15), 5752 (2006).
Reprinted from A. Tafvizi, F. Huang, J. S. Leith, A. R. Fersht, L. A. Mirny and A. M. van Oijen, Tumor Suppressor p53 Slideson DNA with Low Friction and High Stability, Biophys. J. 95 (1), L01–L03 (2008), with permission from Elsevier.

Transport
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 04/18/2018
16. Targeted Diffusion
Diffusion to Capture1
In this section we will discuss the kinetics of association of a diffusing particle with a target. What
is the rate at which a diffusing molecule reaches its target? These diffusion-to-capture problems
show up in many contexts. For instance:
1) Molecule diffusing to fixed target(s). Binding of ligands to enzymes or receptors. Binding
of transcription factors to DNA. Here the target may have complex topology or target
configurations, but it is fixed relative to a diffusing small molecule molec targetD D . The
diffusion may occur in 1, 2, and/or 3 dimensions, depending on the problem.
2) Bimolecular Diffusive Encounter. Diffusion limited chemical reactions. How do two
molecules diffuse into proximity and react? Reaction–diffusion equations.
We will consider two approaches to dealing with these problems:
1) Steady-state solutions. The general strategy is to determine the flux of molecules incident
on the target from the steady state solution to the diffusion equation with an absorbing
boundary condition at the target to account for loss of diffusing molecules once they reach
the target. Then the concentration gradient at the target surface can be used to calculate a
flux or rate of collisions.
2) Mean-first passage time. This is a time-dependent representation of the rate in which you
calculate the average time that it takes for a diffusing object to first reach a target.
Diffusion to Capture by Sphere
What is the rate of encounter of a diffusing species with a spherical target? We can find a steady-
state solution by determining the steady-state radial concentration profile C(r). Assume that
reaction is immediate on encounter at a radius a. This sets the boundary condition, C(a) = 0. We
also know the bulk concentration C0 = C(∞). From our earlier discussion, the steady state solution
to this problem is
0( ) 1a
C r Cr
Next, to calculate the rate of collisions with the sphere, we first calculate the flux density of
molecules incident on the surface of the sphere (r = a):
1. D. F. Calef and J. M. Deutch, Diffusion-controlled reactions, Annu. Rev. Phys. Chem. 34 (1), 493-524 (1983).

2
0
r a
C D CJ a D
r a
(1)
J is expressed as (molec area−1 sec−1) or [(mol/L) area−1 sec−1]. We then calculate the flux, or rate
of collisions of molecules with the sphere (molec sec−1), by multiplying the flux density by the
surface area of the sphere (A = 4πa2):
20
0
0
4
4
dN DCj JA a
dt a
D aC
k C
We associate the constant or proportionality between rate of collisions and concentration with the
pseudo first-order association rate constant, k = 4πDa, which is proportional to the rate of diffusion
to the target and the size of the target.
Reaction–Diffusion
The discussion above describes the rate of collisions of solutes with an absorbing sphere, which
are applicable if the absorbing sphere is fixed. For problems involving the encounter between two
species that are both diffusing in solution ( )A B X , you can extend this treatment to the
encounter of two types of particles A and B, which are characterized by two bulk concentrations
CA and CB, two radii RA and RB, and two diffusion constants DA and DB.
To describe the rate of reaction, we need to calculate the total rate of collisions between A and B
molecules. Rather than describing the diffusion of both A and B molecules, it is simpler to fix the
frame of reference on B and recognize that we want to
describe the diffusion of A with respect to B. In that case, the
effective diffusion constant is
A BD D D
Furthermore, we expand our encounter radius to the sum of
the radii of the two spheres (RAB = rA + rB). The flux density
of A molecules incident on a single B at an encounter radius
of RAB is given by eq. (1)
AA B
AB
DCJ
R
Here J describes the number of molecules of A incident per unit area at a radius RAB from B
molecules per unit time, [molec A] [area of B] −1 sec−1. If we treat the motion of B to be uncorrelated

3
with A, then the total rate of collisions between A and B can be obtained from the product of JA→B
with the area of a sphere of radius RAB and the total concentration of B:
2(4 )
4
A BA B AB B
A B AB B
AB A B
dNJ A C
dt
J R C
DR C C
The same result is obtained if we begin with the flux density of B incident on A, B AJ , using the
same encounter radius and diffusion constant. Now comparing this with expected second order
rate law for a bimolecular reaction
A Ba A B
dNk C C
dt
we see
4a ABA Bk RD D
ka is the rate constant for a diffusion limited reaction (association). It has units of cm3 s−1, which
can be converted to (L mol−1 s−1) by multiplying by Avagadro’s number.
Reactive patches
If you modify these expressions so that only part of the sphere is reactive, then similar results
ensue, in which one recovers the same diffusion limited association rate (ka,0) multiplied by an
additional factor that depends on the geometry of the surface area that is
active: ka=ka,0∙[constant]. For instance if we consider a small circular patch on
a sphere that subtends a half angle θ, the geometric factor should scale as sinθ.
For small θ, sinθ≈θ. If you have small patches on two spheres, which must
diffusively encounter each other, the slowing of the association rate relative
to the case with the fully accessible spherical surface area is
,0/ / 8a a A B A Bk k
For the association rate of molecules with a sphere of radius R covered with n
absorbing spots of radius b:
1
,0/ 1a a
Rk k
nb
Additional configurations are explored in Berg.

4
Diffusion to Capture with Interactions
What if the association is influenced by an additional potential for A-B interactions? Following
our earlier discussion for diffusion in a potential, the potential UAB results in an additional
contribution to the flux:
A A ABU
B
D C UJ
k T r
So the total flux of A incident on B from normal diffusion Jdiff and the interaction potential JU is
A A ABA B A
B
C C UJ D
r k T r
To solve this we make use of a mathematical manipulation commonly used in solving the
Smoluchowski equation in which we rewrite the quantity in brackets as
AB B
AB B
U k TU k T A
A B A
d C eJ D edr
(2)
Substitute this into the expression for the rate of collisions of A with B:
24
A BB A B
B A B
dnA J
dt
R J
Separate variables and integrate from the surface of the sphere to r= using the boundary
conditions: ( ) 0, ( ) B AC R C C :
2 0
1*
4
( )
AAB B AB B
B
CU k T U k TA BA AR
A
drdne D d C e
rdtR C
(3)
Note that integral on the right is just the bulk concentration of A. The integral on the right has units
of inverse distance, and we can write this in terms of the variable R*:
1 2( *) AB B
B
U k T
RR e r dr
Note that when no potential is present, then UAB → 0, and R* = RB. Therefore R* is an effective
encounter distance which accounts for the added influence of the interaction potential, and we can
express it in terms of f, a correction factor the normal encounter radius: R* = f RB. For attractive
interactions R* > RB and f >1, and vice versa.2
2. A more general form for the flux, in which the boundary condition at the surface of the sphere CA(R0) is non-zero,
for instance when there is an additional chemical reaction on contact, is

5
Returning to eq. (3), we see that the rate of collisions of A with B is
*4A BA B A
dnD R C
dt
As before, if we account for the total number of collisions for two diffusing molecules A and B:
*
* * *
4
TOTA B AB B
a A B
a ABA B
AB A B
dnJ A C
dt
k C C
k RD D
R R R
Example: Electrostatic potential3
Let’s calculate the form of the where the interaction is the Coulomb potential.4
2
( )4A B B
AB B
z z eU r k T
r r
where the Bjerrum length is 2 / (4 )B A B Bz z e k T . Then
* 12
1
( )
exp 1
AB B
AB
U k TAB R
B B AB
drR e
r
R
and
1*1B ABR
AB BR e
For B ABR , *AB ABR R . For B ABR , * 0.58AB ABR R if the charges have the same sign
(repel), or * 1.58AB ABR R if they are opposite charges (attract).
0
0
( )02
( )2
4 ( ) ( )4
AB BAB B
AB B
U R k TU k TA A A
A BU r k T
R
D C e C R er J
r e dr
CA() is the bulk concentration of A. For the perfectly absorbing sphere, the concentration of A at the boundary
with B, CA(R0 ) =0. For a homogeneous solution we also assume that the interaction potential at long range
UAB() = 0. 3. See also J. I. Steinfeld, Chemical Kinetics and Dynamics, 2nd ed. (Prentice Hall, Upper Saddle River, N.J., 1998),
4.2-4.4.
4. See M. Vijayakumar, K.-Y. Wong, G. Schreiber, A. R. Fersht, A. Szabo and H.-X. Zhou, Electrostatic enhancement of diffusion-controlled protein-protein association: comparison of theory and experiment on barnase and barstar, J. Mol. Biol. 278 (5), 1015-1024 (1998).

6
Mean First Passage Time5
Another way of describing diffusion-to-target rates is in terms of first passage times. The mean
first passage time (MFPT), ⟨τ⟩, is the average time it takes for a diffusing particle to reach a target
position for the first time. The inverse of ⟨τ⟩ gives the rate of the corresponding diffusion-limited
reaction. A first passage time approach is particularly relevant to problems in which a description
the time-dependent averages hide intrinsically important behavior of outliers and rare events,
particularly in the analysis of single molecule kinetics.
To describe first passage times, we begin by defining the reaction probability R and the survival
probability S. R is a conditional probability function that describes the probability that a molecule
starting at a point x0 0 at time t0 will reach a reaction boundary at x = xf for the first time after
time t: R(xf,t|x0,t0). S is just the conditional probability that the molecule has not reached x = b
during that time interval: S(xf,t|x0,t0). Therefore
1R S
Next, we define F(τ,xf|x0), the first passage probability density. F(τ)dτ is the probability that a
molecule passes through x = xf for the first time between times τ and τ+dτ. R, S, and F are only a
function of time for a fixed position of the reaction boundary, i.e. they integrate over any spatial
variations. To connect F with the survival probability, we recognize that the reaction probability
can be obtained by integrating over all possible first passage times for time intervals τ < t.
Dropping space variables, recognizing that (t‒t0) = τ, and setting x0 = 0,
0( ) ( )
tR t F d
This relation implies that the first passage time distribution can be obtained by differentiating S
( ) ( ) ( )F t R t S tt t
(4)
Then the MFPT is obtained by averaging over F(t)
0
( )F d
(5)
To evaluate these quantities for a particular problem, we seek to relate them to the time-dependent
probability density, P(x,t|x0,t0), which is an explicit function of time and space. The connection
between P and F is not immediately obvious because evaluating P at x = xf without the proper
boundary conditions includes trajectories that have passed through x = xf before returning there
5. A. Nitzan, Chemical Dynamics in Condensed Phases: Relaxation, Transfer and Reactions in Condensed
Molecular Systems. (Oxford University Press, New York, 2006); S. Iyer-Biswas and A. Zilman, First-Passage Processes in Cellular Biology, Adv. Chem. Phys. 160, 261–306 (2016).

7
again later. The key to relating these is to recognize that the survival probability can be obtained
by calculating a diffusion problem with an absorbing boundary condition at x = xf that does not
allow the particle to escape: P(xf,t|x0) = 0. The resulting probability distribution Pa(x,t|x0,t0) is not
conserved but gradually loses probability density with time. Hence, we can see that the survival
probability is an integral over the remaining probability density that describes particles that have
not yet reached the boundary:
,fx
aS t dx P x t
(6)
The mean free passage time can be written as
0
,fx
adx dt P x t
The next important realization is that the first passage time distribution is related to the flux of
diffusing particles through xf. Combining eq. (4) and (6) shows us
( ) ,fx
aF t dx P x tt
(7)
Next we make use of the continuity expression for the probability density
P j
t x
j is a flux, or probability current, with units of s−1, not the flux density we used for continuum
diffusion J (m−2 s−1). Then eq. (7) becomes
( ) ,
( , )
fx
a
a f
F t dx j x tx
j x t
(8)
So the first passage time distribution is equal to the flux distribution for particles crossing the
boundary at time t. Furthermore, from eq. (5), we see that the MFPT is just the inverse of the
average flux of particles crossing the absorbing boundary:
1
( )a fj x
(9)
In chemical kinetics, ( )a fj x is the rate constant from transition state theory.
Calculating the First Passage Time Distribution
To calculate F one needs to solve a Fokker–Planck equation for the equivalent diffusion problem
with an absorbing boundary condition. As an example, we can write these expressions explicitly

8
for diffusion from a point source. This problem is solved using the Fourier transform method,
applying absorbing boundary conditions at xf to give
( , ) ( , ) (2 , )a fP x t P x t P x x t (x ≤ xf)
which is expressed in terms of the probability distribution in the absence of absorbing boundary
conditions:
21/2 0, 4 exp
4
x xP x t Dt
Dt
The corresponding first passage time distribution is:
2
00
1/23exp
44
ffx xx x
F tDtDt
F(t) decays in time as t−3/2, leading to a long tail in the distribution. The mean of this distribution
gives the MFPT
2 / 2fx D
and the most probable passage time is 2 / 6fx D . Also, we can use eq. (6) to obtain the survival
probability
erf erf24
fxS t
tDt
S(t) depends on the distance of the target and the rms diffusion length over time t. At long times
S(t) decays as t−1/2.

9
It is interesting to calculate the probability that the diffusing particle will reach xf at any time. From
eq. (7), we can see that this probability can be calculated from F 0
d . For the current
example, this integral over F gives unity, saying that a random walker in 1D will eventually reach
every point on a line. Equivalently, it is guaranteed to return to the origin at some point in time.
This observation holds in 1D and 2D, but not 3D.
Calculating the MFPT From Steady‐State Flux
From eq. (9) we see that it is also possible to calculate the MFPT by solving for the flux at an
absorbing boundary in a steady state calculation. As a simple example, consider the problem of
releasing a particle on the left side of a box, 0, 0P x x x , and placing the reaction boundary
at the other side of the box x = b. We solve the steady-state diffusion equation 2 2/ 0aP x with
an absorbing boundary at x = b, i.e., ( , ) 0P b t . This problem is equivalent to absorbing every
diffusing particle that reaches the right side and immediately releasing it again on the left side.
The steady-state solution is 21a
xP x
b b
Then, we can calculate the flux of diffusing particles at x b :
2
2( )
x b
P Dj b D
x b
and from the inverse we obtain the MFPT:
21
( ) 2
b
j b D
P(x) Release here
x0 0 x b
Perfectly absorbing boundary

10
MFPT in a Potential
To extend this further, let’s examine a similar 1D problem in which a
particle is released at x0 = 0, and diffuses in x toward a reaction boundary
at x = b, but this time under the influence of a potential U(x). We will
calculate the MFPT for arrival at the boundary. Such a problem could be
used to calculate the diffusion of an ion through an ion channel under the
influence of the transmembrane electrochemical potential.
From our earlier discussion of diffusion in a potential, the steady state
flux is
( ) ( )
( )
( ) ( )B B
B
U b k T U x k T
b U x k T
x
D P b e P x ej
e dx
Applying the absorbing boundary condition, P(b) = 0, the steady state probability density is
( ) ( )( ) B BbU x k T U x k T
a x
jP x e e dx
D (10)
Now integrating both sides over the entire box, the left side is unity, so we obtain an expression
for the flux
( ) ( )
0
1 1B B
b bU x k T U x k T
xe e dx dx
j D (11)
But j−1 is just the MFPT, so this expression gives us ⟨τ⟩. Note that if we set U to be a constant in
eq. (11), that we recover the expressions for ⟨τ⟩, j, and Pa in the preceding example.
Diffusion in a linear potential
For the case of a linear external potential, we can write the potential in terms of a constant external
force U f x . Solving this with the steady state solution, we substitute U into eq. (11) and obtain
2
1 11
fbe fb
j Df
(12)
where / Bf f k T
is the force expressed in units of thermal energy. Substituting into eq. (10)
gives the steady state probability density
( )1
( )1
f b x
f b
f eP x
e f b

11
Now let’s compare these results from calculations using the first passage time distribution. This
requires solving the diffusion equation in the presence of the external potential. In the case of a
linear potential, we can solve this by expressing the constant force as a drift velocity
xB
f fDv f D
k T
Then the solution is obtained from our earlier example of diffusion with drift:
2
1, exp
44
x f DtP x t
DtDt
The corresponding first passage time distribution is
2
3exp
44
b f DtbF t
DtDt
and the MFPT is given by eq. (12).
Readings
1. H. C. Berg, Random Walks in Biology. (Princeton University Press, Princeton, N.J., 1993).

Transport
Andrei Tokmakoff, Concepts in Biophysical Chemistry, 05/14/2018
17. Directed and Active Transport
Motor Proteins
Many proteins act as molecular motors using an energy source to move themselves or cargo in
space. They create directed motion by coupling energy use to conformational change.
Motor Classes
Translational
Cytoskeletal motors that step along filaments (actin, microtubules)
Helicase translation along DNA
Rotary
ATP synthase
Flagellar motors
Polymerization
Cell motility
Translocation
DNA packaging in viral capsids
Transport of polypeptides across membranes
Translational Motors
Processivity
Some motors stay on fixed track for numerous cycles
Others bind/unbind often—mixing stepping and diffusion
Cytoskeletal motors
Used to move vesicles and displace one filament relative to another
Move along filaments—tracks have polarity (±)
Steps of fixed size
Classes
Dynein moves on Microtubules (+ → ‒)
Kinesin Microtubules (mostly ‒ → +)
Myosin Actin

2
Molecular Motors
We can make a number of observations about common properties of translational and rotational
motor proteins.
Molecular motors are cyclical
They are “processive” involving discrete stepping motion
Multiple cycles lead to directional linear or rotary motion
Molecular motors require an external energy source
Commonly this energy comes from ATP hydrolysis
o ~50 kJ/mol or ~20 kBT or ~80 pN/nm
o ATP consumption correlated with stepping
Or from proton transfer across a transmembrane proton gradient
Protein motion is strongly influenced by thermal fluctuations and Brownian motion
Molecular motors work at energies close to kBT
Short range motions are diffusive—dominated by collisions
Inertial motion does not apply

3
Passive vs Active Transport
Directed motion of molecules in a statistically deterministic manner (i.e., x(t) = v t) in a thermally
fluctuating environment cannot happen spontaneously. It requires a free energy source, which may
come from chemical bonds, charge transfer, and electrochemical gradients. From one perspective,
displacing a particle requires work, and the force behind this work originates in free energy
gradients along the direction of propagation
revpath
Gw f dx f
x
An example of this is steady-state diffusion driven by a spatial difference in chemical potential,
for instance the diffusion of ions through a membrane channel driven by a transmembrane
potential. This problem is one of passive transport. Although an active input of energy was required
to generate the transmembrane potential and the net motion of the ion is directional, the ion itself
is a passive participant in this process. Such processes can be modeled as diffusion within a
potential.
Active transport refers to the direct input of energy into the driving the moving object in a
directional manner. At a molecular scale, even with this input of energy, fluctuations and Brownian
motion remain very important.
Even so, there are multiple ways in which to conceive of directed motion. Step-wise processive
motion can also be viewed as a series of states along a free energy or chemical potential gradient.
Consider this energy landscape:
Under steady state conditions, detailed balance dictates that the ratio of rates for passing forward
or reverse over a barrier is dictated by the free energy difference between the initial and final states:

4
/
–
BG k Tke
k
and thus the active driving force for this downhill process is
–
ln
BG k T k
fx x k
This perspective is intimately linked with a biased random walk model when we remember that
– –
k P
k P
If our free energy is the combination of a chemical process ( 0G ) and an external force, then we
can write
0
–
exp ( ) / B
kG f x k T
k
Feynman’s Brownian Ratchet
Feynman used a thought experiment to show you cannot get work from thermal noise.1 Assume
you want to use the thermal kinetic energy from the molecules in a gas, and decide to use the
collisions of these molecules with a vane to rotate an axle. The direction or rotation will be based
on the velocity of the molecules hitting the vane, so to assure that this rotation proceeds only one
way, we use a ratchet with a pawl and spring to catch the ratchet when it advances in one direction.
This is the concept of rectified Brownian motion.
At a microscopic level, this reasoning does not hold, because the energy used to rotate the ratchet
must be enough to lift the pawl against the force of the spring. If we match the thermal energy of
gas 212 xT m v to the energy needed to raise the pawl 21
2U x we find that the pawl will also
be undergoing fluctuations in x with similar statistics to the bombardment of the vane 2/Bmk T x . Therefore, the ratchet will instead thermally diffuse back and forth as a random
walk. Further, Feynman showed that if you imbedded the vane and ratchet in reservoirs of
temperature T1 and T2, respectively, then the ratchet will advance as desired if T1 > T2, but will
move in reverse if T1 < T2. Thus, one cannot extract useful work from thermal fluctuations alone.
You need some input of energy—any source of free energy.
1. http://www.feynmanlectures.caltech.edu/I_46.html

5
Brownian Ratchet2
The Brownian ratchet refers to a class of models for directed transport using Brownian motion that
is rectified through the input of energy. For a diffusing particle, the energy is used to switch
between two states that differ in their diffusive transport processes. This behavior results in biased
diffusion. It is broadly applied for processive molecular motors stepping between discrete states,
and it therefore particularly useful for understanding translational and rotational motor proteins.
One common observation we find is that directed motion requires the object to switch between
two states that are coupled to its motion, and for which the exchange is driven by input energy.
Switching between states results in biased diffusion. The interpretation of real systems within the
context of this model can vary. Some people consider this cycle as deterministic, whereas others
consider it quite random and noisy, however, in either case, Brownian motion is exploited to an
advantage in moving the particle.
We will consider an example relevant to the ATP-fueled stepping of cytoskeletal motors along a
filament. The motor cycles between two states: (1) a bound state (B), for which the protein binds
to a particular site on the filament upon itself binding ATP, and (2) a free state (F) for which the
protein freely diffuses along the filament upon ATP hydrolysis and release of ADP + Pi. The bound
state is described by a periodic, spatially asymmetric energy profile UB(x), for which the protein
localizes to a particular energy minimum along the filament. Key characteristics of this potential
are a series of sites separated by a barrier ΔU > kBT, and an asymmetry in each well that biases the
system toward a local minimum in the direction of travel. In the free state, there are no barriers to
motion and the protein diffuses freely. When the free protein binds another ATP, it returns to UB(x)
and relaxes to the nearest energy minimum.
2. K. Dill and S. Bromberg, Molecular Driving Forces: Statistical Thermodynamics in Biology, Chemistry, Physics,
and Nanoscience. (Taylor & Francis Group, New York, 2010); R. Phillips, J. Kondev, J. Theriot and H. Garcia, Physical Biology of the Cell, 2nd ed. (Taylor & Francis Group, New York, 2012).

6
Let’s investigate the factors governing the motion of the particle in this Brownian ratchet, using
the perspective of a biased random walk. The important parameters for our model are:
The distance between adjacent binding sites is Δx.
The position of the forward barrier relative to the binding
site is xf. A barrier for reverse diffusion is at –xr, so that
f rx x x
The asymmetry of UB is described by
( – ) /f rx xx
The average time that a ratchet stays free or bound are τF and τB. Therefore, the average
time per bind/release cycle is
BFt
We define a diffusion length 0 which is dependent on the time that the protein is free
0 ( ) 4 F FD
Conditions For Efficient Transport
Let’s consider the conditions to maximize the velocity of the Brownian ratchet.
1) While in F: the optimal period to be diffusing freely is governed by two opposing concerns.
We want the particle to be free long enough to diffuse past the forward barrier, but not so
long that it diffused past the reverse barrier. Thus we would like the diffusion length to lie
between the distances to these barriers:
0
0
4 F
r F
D
x x
Using the average value as a target:
0
2
2 2
16
r F
F
x x x
x
D
2) While in B: After the binding ATP, we would like the particle to stay with ATP bound long
enough to relax to the minimum of the asymmetric energy landscape. Competing with this
consideration, we do not want it to stay bound any longer than necessary if speed is the
issue.

7
We can calculate the time needed to relax from the barrier at xr forward to the potential
minimum, if we know the drift velocity vd of this particle under the influence of the
potential.
/B r dx v
The drift velocity is related to the force on the particle through the friction coefficient,
/dv f , and we can obtain the magnitude of the force from the slope of the potential:
r
Uf
x
So the drift velocity is dB r B
f D U Dv
k T x k T
and the optimal bound time is
2r B
B
x k T
U D
Now let’s look at this a bit more carefully. We can now calculate the probability of diffusing
forward over the barrier during the free interval by integrating over the fraction of the population
that has diffused beyond xf during τF. Using the diffusive probability distribution with x0→0,
2
0
41
4
1
2
f
F
xF
f
x DP dxD
xerfc
e
Similarly, the probability for diffusing backward over the barrier at x = ‒xr is
–0
1
2rx
P erfc
Now we can determine the average velocity of the protein by calculating the average displacement
in a given time step. The average displacement is the difference in probability for taking a forward
versus a reverse step, times the step size. This displacement occurs during the time interval Δt.
Therefore,
0 0( ) ( )2
B F
fr
F F
P xv
txP P
xxxerf erf
t

8
It is clear from this expression that the velocity is zero when the asymmetry of the potential is zero.
For asymmetric potentials, P+ and P‒ are dependent on τF, with one rising in time faster than the
other. As a result, the velocity, which depends on the difference of these reaches a maximum in
the vicinity of 2 / F fx D .
So how does the ATP hydrolysis influence the free energy gradient? Here free energy gradient is
G
Hyd.
x
barrier hydrolysis
barrier
G G kT
G kT
k A e
k A e
v k k x

9
Polymerization Ratchet and Translocation Ratchet
Polymerization and translocation ratchets refer to processes that result in directional displacements
of a polymer or oligomer chain rather than a specific protein. The models for these ratchets also
involve rectified Brownian motion, in which a binding unit is added to a diffusing chain to bias
the diffusive motion in a desired direction. Once the displacement reaches a certain diffusion
length, a monomer or binding protein can add to the chain, locking in the forward diffusion of the
chain. In this case, it is the binding or attachment of protein units that consumes energy, typically
in the form of ATP or GTP hydrolysis.
Translocation Ratchet3
Protein translocation across cell membranes is a ubiquitous process for transporting polypeptide
chains across bacterial and organelle membranes through channels with the help of chaperone
proteins on the inner side of the membrane. The translocation ratchet refers to a model in which
the transport of the chain occurs through Brownian motion
which is rectified by the binding of proteins to the chain on
one side of the pore as it is displaced. Once the chain diffuses
through the pore for a distance Δx, a protein can bind to the
chain, stopping backward diffusion. At each step, energy is
required to drive the binding of the chaperone protein.
The translocation ratchet refers to a continuum model for the diffusion of the chain. It is possible
to map this diffusion problem onto a Smoluchowski equation, but it would be hard to solve for the
probability density. It is easier if we are just interested in describing the average velocity of the
chain under steady state conditions, we can solve for the steady-state chain flux across the pore:
3. C. S. Peskin, G. M. Odell and G. F. Oster, Cellular motions and thermal fluctuations: the Brownian ratchet,
Biophys. J. 65 (1), 316–324 (1993).

10
B
P fJ x D P
x k T (1)
where f is the force acting against the chain displacement. Steady state behavior corresponds to
0 P t , so from the continuity equation
P J
t x
we know that 0 J x . Therefore J is a constant. To find P, we want to solve
0
B
P f JP
x k T D
for which the general solution is /1 2
Bfx k TP A e A . We find the integration constants using the
boundary condition P x,t 0, which reflects that a protein will immediately and irreversibly
bind once the diffusing chain reaches an extension x. (No back-stepping is allowed.) And we use
the conservation statement:
dx P x 10
x
which says that a protein must be bound within the interval 0 to Δx. The steady-state probability
distribution with these two boundary conditions is
exp 1 / 1
1
f
f f x xP x
x f e (2)
B
f xf
k T
f is a dimensionless constant that expresses the load force in units of kBT opposing ratchet
displacement by Δx.

11
Substituting eq. (2) into eq. (1) allows us to solve for J.
2
2( ) 1 2exp 1
1
f
Df xJ x f
xx f e
Now, the average velocity can be determined from v J x . Evaluating the flux at x = Δx:
2 / 22
1
f
fDv
x e f
Now look at low force limit f 0. Expand 21 / 2
f
e f f :
max
2
D
v vx
Note that this is the maximum velocity for ideal ratchet, and it follows the expected behavior for
pure diffusive motion.
Now consider probability of the protein binding is governed by equilibrium between free and
bound forms:
a a B
d Fd
k kF B K
kk
Here ka refers to the effecting quasi-first-order rate constant for binding at a chaperone
concentration [chap]: aak k chap .

12
Fast kinetics approximation
2 / 22
1
1 ( 1)
f
f
fDv
x ef
K e
max
2 1
1 2
Dv
x K
Stall load
0
1ln 1Bk T
fx K

Cooperativity
Andrei Tokmakoff 06/20/2017
18. Cooperativity and the Helix–Coil Transition It is often observed in molecular biology that nanoscale structures with sophisticated
architectures assemble spontaneously, without the input of external energy. The behavior is
therefore governed by physical principles that we can describe with thermodynamics and
statistical mechanics. Examples include:
Protein and RNA folding
DNA hybridization
Assembly of protein complexes and viral capsids
Micelle and vesicle formation
Although each of these processes has distinct characteristics, they can be broadly described as
self-assembly processes.
A characteristic of self-assembly is that it appears thermodynamically and kinetically as a simple
“two-state transition”, even if thousands of atomic degrees of freedom are involved. That is, as
one changes thermodynamic control variables such as temperature, one experimentally observes
an assembled state and a disassembled state, but rarely an intermediate, partially assembled state.
Furthermore, small changes in these thermodynamic variables can lead to dramatic changes, i.e.,
melting of DNA or proteins over a few degrees. This binary or switch-like behavior is very
different from the smoothly varying unfolding curves we derived for simple lattice models of
polymers.
Phase transitions and phase equilibria are related phenomena described by the presence (or
coexistence) of two states. These manifest themselves as a large change in the macroscopic
properties of the system with only small changes in temperature or other thermodynamic
variables. Heating liquid water from 99 °C to 101 °C has a profound effect on the density, which
a 2° change at 25 °C would not have.

2
Such a “first-order” phase transition arises from a discontinuity in the free energy as a function
of an intensive thermodynamic variable.1 The thermodynamic description of two-state behavior
governing a phase transition is illustrated below for the equilibrium between phases A and B. The
free-energy profile is plotted as a function of an order parameter, a variable that distinguishes the
physical characteristics relevant to the change of phase. For instance for a liquid–gas-phase
transition, the volume or density are order parameters that change dramatically. As the
temperature is increased the free energy of each state, characterized by its free energy minimum
(Gi), decreases smoothly and continuously. However, state B decreases more rapidly that state A.
While state A is the global free-energy minimum at low temperatures, state B is at high
temperature. The phases are at equilibrium with each other at the temperature where GA = GB.
The presence of a phase transition is dependent on all molecules of the system changing state
together, or cooperatively. In a first-order phase transition, this change is infinitely sharp or
discontinuous, but the helix–coil transition and related cooperative phenomena can be
continuous. Cooperativity is a term that can refer both to macroscopic phenomena and to a
molecular scale. We use it to refer to many degrees of freedom changing concertedly. The size or
number of particles or molecules participating in a cooperative process is the cooperative unit. In
the case of a liquid–gas-phase transition, the cooperative unit is the macroscopic sample,
whereas for protein folding it may involve most of the molecule.
What underlies cooperativity? We find that the free energy of the system is not simply additive
in the parts. The energy of a particular configurational state depends on the configuration of its
neighbors. For instance, the presence of one contact or molecular interaction increases or
decreases the propensity for a second contact or interaction. We refer to this as positive or
negative cooperativity. Beyond self-assembly, cooperativity plays a role in the binding of
1. A first order transition is described as a discontinuity in ∂G/∂S or ∂G/∂V. A second order transition is one in
which two phases merge into one at a critical point and is described by a discontinuity in the heat capacity or expansivity/compressibility of the system (∂S/∂T, ∂S/∂P, ∂V/∂T, or ∂V/∂P).

3
multiple ligands and allostery. Here we want to discuss the basic concepts relevant to
cooperativity and its relationship to two-state behavior.
Based on observations we have previously made in other contexts, we can expect that
cooperative behavior must involve competing thermodynamic effects. Structure is formed at the
expense of a large loss of entropy, but the numerous favorable contacts that are formed lower the
enthalpy even more. The free-energy change may be small, but this results from two opposing
effects of large magnitude and opposite sign (H vs. TS). A small tweak in temperature can
completely change the system.

4
Helix–Coil Transition2
Cooperativity plays an important role in the description of the helix–coil transition, which refers
to the reversible transition of macromolecules between coil and extended helical structures. This
phenomenon was observed by Paul Doty in the 1950s for the conversion of polypeptides
between a coil and α-helical form,3 and for the melting and hybridization of DNA.4 Bruno Zimm
developed a statistical theory with J. Bragg that described the helix–coil transition, which forms
the basis of our discussion.5
One of the observations that motivated this work is shown in the figure below. The fraction of
helical structure observed in the polypeptide poly-benzylglutamate showed a temperature-
dependent melting behavior in which the steepness of the transition increased with polymer
chain length. This length dependence indicates a higher probability of forming helices when
more residues are present, and that the linkages do not act independently. This suggests a two-
step mechanism. The rate-limiting step of forming an α helix is the nucleation of a single
hydrogen bonded residue i → i + 4 loop. Once this occurs, the addition of further hydrogen
bonds to extend this helix is much easier and occurs in rapid succession.
2. C. R. Cantor and P. R. Schimmel, Biophysical Chemistry Part III: The Behavior of Biological Macromolecules.
(W. H. Freeman, San Francisco, 1980), Ch. 20; D. Poland and H. A. Scheraga, Theory of Helix–Coil Transitions in Biopolymers. (Academic Press, New York, 1970).
3. P. Doty, A. M. Holtzer, J. H. Bradbury and E. R. Blout, POLYPEPTIDES. II. THE CONFIGURATION OF POLYMERS OF γ-BENZYL-L-GLUTAMATE IN SOLUTION, J. Am. Chem. Soc. 76 (17), 4493-4494 (1954); P. Doty and J. T. Yang, POLYPEPTIDES. VII. POLY-γ-BENZYL-L-GLUTAMATE: THE HELIX-COIL TRANSITION IN SOLUTION, J. Am. Chem. Soc. 78 (2), 498-500 (1956).
4. J. Marmur and P. Doty, Heterogeneity in Deoxyribonucleic Acids: I. Dependence on Composition of the Configurational Stability of Deoxyribonucleic Acids, Nature 183 (4673), 1427-1429 (1959).
5. B. H. Zimm and J. K. Bragg, Theory of the phase transition between helix and random coil in polypeptide chains, J. Chem. Phys. 31, 526-535 (1959).
Adapted from B. H. Zimm, P. Doty and K. Iso, Proc.Natl. Acad. Sci. U. S. A. 45, 1601-1607 (1959).Copyright 1959 PNAS.

5
To model this behavior, we imagine that the polypeptide consists of a chain of segments that can
take on two configurations, H or C.
H: helix (decreases entropy but also lower enthalpy)
C: coil (raises entropy)
To specify the state of a conformation through a sequence, i.e.,
…HCHHHHCCCCHHH…
Remember to not take this too literally, and be flexible in the interpretation of your model.
Although this model was derived with an α-helix formation in polypeptides in mind, in a more
general sense H and C do not necessarily refer explicitly to residues of a sequence, but just for
independently interacting regions.
If there are n segments, these can be divided into nH helical and nC coil segments.
nH + nC = n
The segments need not correspond directly to amino acids, but structurally and energetically
distinct regions. Our goal will be to calculate the fractional helicity of this system H as a
function of temperature, by calculating the conformational partition function, qconf, by an explicit
summation over i microstates, Boltzmann weighed by the microstate energy Ei:
qconf
(n) i config. eEi kBT (1)
Non‐cooperative Model
We start our analysis by discussing a non-cooperative model. We assume:
Each segment can switch conformation between H and C independently of the others.
The formation of H from C lowers the configurational energy by Δ H CE E is a
free-energy change per residue, where Δ < 0. We will take the coil state to be the
reference energy EC = 0.
Therefore the energy of the system is determined from the number of H residues present,
not the specific sequence of H and C segments.
( )i H HE E n n
Then, we can calculate qconf using ( , )Hg n n , the degeneracy of distinguishable states for a
polymer of length n with nH helical segments. The conformational partition function is obtained
by

6
qconf (n) g(n,nH )
nH 0
n
enH kBT
(2)
In evaluating the partition functions in helix–coil transition models, it is particularly useful to
define a “statistical weight” for the helical configuration. It describes the influence of having an
H on the probability of observing a particular configuration at kBT:
s e kBT (3)
For the present model, we can think of s as an equilibrium constant for the process of adding a
helical residue to a sequence:
( 1)
( )H
H
P ns
P n
This equilibrium constant is related to the free energy change for adding a helical residue to the
growing chain. Then we can write eq. (2) as
q
conf(n) g(n,n
H)
nH 0
n
snH
Since there are only two possible configurations (H and C), the degeneracy of configurations
with nH helical segments in a chain of length n is given by the binomial coefficients:
!( , )
! !HHH C
nng n n
nn n
(4)
since C Hn n n . Then using the binomial theorem, we obtain
qconf
(n) 1 s n (5)
Also, the probability of a chain with n segments having nH helical linkages is
( )/
conf
( , )( , )
1
H B HE n k T nH
H nH
ng n n e sP n n
nq s
(6)
Example: n = 4
The conformations available are at right. The molecular
conformational partition function is

7
qconf
1 4e kBT 6e2 kBT 4e3 kBT e4 kBT
1 4s 6s2 4s3 s4
1 s 4
The last step follows from Pascal’s Rule for binomial coefficients. From eq. (6), the
probability of having two helical residues in a four-residue sequence is:
2
4
64,2
1
sP
s
To relate this to an observable quantity, we define the fractional helicity, the average fraction of
residues that are in the H form.
HH
n
n
(7)
0
,H
n
H HHn
n P n nn
(8)
Using this amazing little identity, which we derive below,
H
s qn
q s
(9)
You can use eq. (5) to show:
1H
nsn
s
(10)
and 1H
s
s
(11)
This takes the same form as one would expect for the simple chemical equilibrium of an
C H molecular reaction. If we define the equilibrium constant KHC = [H]/[C], then the
fraction of molecules in the H state is [ ] ([ ] [ ]) (1 )H HC HCH C H K K . In this limit s =
KHC.
Below we plot eq. (11), choosing Δϵ to be independent of temperature. θH is a smooth and slowly
varying function of T and does not show cooperative behavior. Its high temperature limit is θH =
0.5, reflecting the fact that in the absence of barriers, the H and C configurations are equally
probable for every residue.
all C one H two H

8
We can look a bit deeper at what is happening with the structures present by plotting the
probability distribution function for finding nH helical segments within a chain of length n, eq.
(6), and the associated energy landscape (a potential of mean force):
( , ) ln[ ( , )] ln ( , ) HnH B H B HF n n Nk T P n n Nk T g n n s
The maximum probability and free-energy minimum is located at full helix content at the lowest
temperature, and gradually shifts toward nH/n = 0.5 with increasing temperature. The probability
density appears Gaussian, and the corresponding free energy appears parabolic. Using similar
methods to that described above, we can show that the variance in this distribution scales as
n−1/2.The presence of a single shifting minimum is referred to as a transition in a one-state
system, rather than two-state behavior expected for phase transitions. Here nH is the order
parameter that characterizes the extend of folding of the helix.
Where does eq. (9) come from? For the moment, we will drop the “conf” and “H” subscripts,
mainly to write things more compactly, but also to emphasize the generality of this method to all
polynomial expansions. Using eq. (2), n
nq g s , and recognizing that g is not a function of s:
1n
n
qn g s
s
1 n
nn g s
s (12)
From eq. (6), nnP g s q , we can write this in terms of the helical segment probability

9
1 1
nn
qnP
q s s
(13)
Comparing eq. (13) with eq. (12), nnnPn , we see that
s
q
q
s n or
ln
ln
qn
s
(14)
This method of obtaining averages from derivatives of a polynomial appears regularly in
statistical mechanics.6
Cooperative Zimm–Bragg Model
Let’s modify the model to add an element of cooperativity to the segments in the chain. In order
to form a helix, you need to nucleate a helical turn and then adding adjacent helical segments is
easier. The probability of forming a turn is relatively low, meaning the free energy barrier for
nucleation of one H in a sequence of C is relatively high: 0nucG . However the free-energy
change per residue for forming H from C within a helical stretch, HCG , stabilizes the growing
helix. Based on these free energies, we define statistical weights:
s eGHC kBT
eGnuc kBT
eGnuc kBT
s and σ are also known as the Zimm–Bragg parameters. Here, s is the statistical weight to add
one helical segment to an existing continuous sequence (or stretch) of H, which we interpret as
an equilibrium constant:
( 1)[ ]
[ ] ( )H H
H H
P nCHHHHCCs
CHHHCCC P n
is the statistical weight for each stretch of H. This is purely to reflect the probability of forming
a new helical segment within a stretch of C. The energy benefit of making the helical form is
additional:
( 1)[ ]
[ ] ( )H H
H H
PCCCHCCs
CCCCCC P
H is the number of helical stretch segments in a chain. Note that the formation of the first
helical segment has a contribution from both the nucleation barrier (σ) and the formation of the
first stabilizing interaction (s). The statistical weight for a particular microstate is then
6. K. Dill and S. Bromberg, Molecular Driving Forces: Statistical Thermodynamics in Biology, Chemistry,
Physics, and Nanoscience. (Taylor & Francis Group, New York, 2010), Appendix C p. 705.

10
/ .i B H HE k T ne s Since Gnucl
will be large and positive, ≪ 1. Also, we take s > 1, and the
presence of cooperativity will mainly hinge on σ ≪s.
Example
A 35 segment chain has 235 = 3.4×1010 possible configurations. This particular microstate
has fifteen helical segments (nH = 16) partitioned into three helical stretches (νH = 3):
15 10
CCCCCC HHHHH CCC H CCCCCCCC HHHHHHHHHH CC
We ignore all Cs since the C state is the ground state and their statistical weight is 1.
/ 16 3i B H HE k T ne s s
Now the partition function involves a sum over all possible helical segments and stretches:
qconf n g n,nH ,H H 0
max
nH 0
n
snH H (15)
Since the all-coil state (nH = 0) is the reference state, it contributes a value of 1 to the partition
function (the leading term in the summation). Therefore, the probability of observing the all-coil
state is
1( , 0)H confP n n q (16)
From eq. (15), the mean number of helical residues is
nH
1
qconf
nH
g n,nH
,H
H 0
max
nH 0
n
snH H
In these equations, νmax refers to the maximum number of helical stretches for a given nH, nH/2
for even nH and (nH/2)+1 for odd nH.
Zipper model
As a next step, we examine what happens with the simplifying assumption that one
helical stretch is allowed. This is the single stretch approximation or the zipper model, in
which conversion to a helix proceeds quickly once a single turn has been nucleated. This
is reasonable for short chains in which two stretches are unlikely due to steric constraints.
For the single stretch case, we only need to account for νH = 0 and 1. For νH = 0 the
system is all coil (nH = 0) and there is only one microstate to count, g(n,0,0) = 1. For a
single helical stretch we need to accounts for the number of ways of positioning a single
helical stretch of nH residues on a chain of length n: , ,1 1H Hg n n n n . Then the
partition function, eq. (15), is

11
qzip n 1 (n nH 1)snH
nH 1
n
(17)
We can evaluate these sums using the relations
1
1
12
1
1
( 1) 1( 1)
H
H
H
H
nnn
n
nn n n
Hn
s ss
s
sn s ns n s
s
which leads to
qzip
(n) 1 s2
(s1)2sn
n
s (n1)
Following the general expression in eq. (6), and counting the degeneracy of ways to place
a stretch of nH segments, the probability distribution of helical segments is
n( 1)
( , )H
HH H
conf
n n sP n n
q
1≤ nH ≤ n (18)
This expression does not apply to the case nH = 0, for which we turn to eq. (16). The
helical fraction is obtained from ( ln )sH zipn q s :
2 1
3 2 1
( 2) ( 2)
( 1) 1 ( 1) ( 1)
n n
H n
s ns n s n s n
s n s s s n n s
Multiple stretches
Expressions for the full partition function of chains with length n, eq. (15), can be
evaluated for one-dimensional models that account for nearest neighbor interactions
(Ising model) using an approach based on a statistical weight matrix, M. You can show
that the Zimm–Bragg partition function can be written as a product of matrices of the
form
qconf
n 1 0 Mn 11
M 1 s1 s
Each matrix represents possible configurations of two adjoining partners, and M raised to
the nth power gives all configurations for a chain of length n. This form also indicates that
we can obtain a closed form for qconf from the eigenvalues of M raised to the nth power. If

12
T is the transformation that diagonalizes M, Λ = T‒1MT, then n M TΛnT‒1. This
approach allows us to write
with
12
1/22
(1 )
(1 ) 4
s
s s
and the fractional helicity is obtained from
H
nH
n
s
n
lnqconf
s (19)
Simplifying these expressions for the limit of long chains (n→∞, 1 1n n ), one finds
and 1
1 1 2
1H
ss
s
(20)
Note that when you set σ =1, you recover the noncooperative expression, eq. (11). When
s→1, θH→0.5.
Below, we examine the transition behavior in the large n limit from eq. (20) as a function
of the cooperativity parameter σ. We note that a sharp transition between an ensemble
that is mostly coil to one that is mostly helix occurs near s = 1, the point where these
states exist with equal probability. When the C H equilibrium shifts slightly to favor
H (s slightly greater than 1), most of the sample quickly converts to helical form. When
the equilibrium shifts slightly toward C, most of the sample follows. As σ decreases, the
steepness of this transition grows as 1/21( / ) 1/ 4sd ds . Therefore, we conclude that
highly cooperative transitions will have s ≈ 1 and σ ≪ s. In practice for polypeptides, we
find that s lies between 5×10–3 and 5×10–5.

13
Large n limit: n dependence:
Next, we explore the chain-length dependence for finite chains. We find that the
cooperativity of this transition, observed through the steepness of the curve at θH = 0.5
increases with n. We also observe that the observed midpoint (θH = 0.5) lies at s > 1,
where the single linkage equilibrium favors the H form. This reflects the constraints on
the length of helical stretches available a given chain.
Temperature Dependence
Now let’s describe the temperature dependence of the cooperative model. The helix–coil
transition shows a cooperative melting transition, where heating the sample a few degrees causes
a dramatic change from a sample that is primarily in the C form to one that is primarily H.
Multiple temperature-dependent factors make this a bit difficult to deal with analytically,
therefore we focus on the behavior at the melting temperature Tm, which we define as the point
where θH(TM) = 0.5.
Look at the slope of θ at Tm. From chain rule:
lnd d ds d d ss
dT ds dT ds dT
Since we interpret s as an equilibrium constant for the addition of one helical residue to a stretch,
we can write a van’t Hoff relation
0
2
ln HC
B
Hd s
dT k T
Note that this relation assumes that ΔH0 is independent of temperature, which generally is a
concern, but we will not worry too much since we are just evaluating this at TM. Next we focus
our discussion on the high n limit. From the Zimm–Bragg model:
1/21
1
4s
d
ds

14
Then, we set s(Tm) = 1, and combine these results to give the slope of the melting curve at Tm:
0
1/2 24m
HC
B mT T
Hdk TdT
The slope of at Tm has units of inverse temperature, so we can
also express this as a transition width: 1
mm T
T d dT .
Keep in mind this van’t Hoff analysis comes with some real
limitations when applied to experimental data. It does not
account for the finite size of the system, which we have seen
shifts s(Tm) to be >1, and the knowledge of parameters at Tm
does not necessarily translate to other temperatures. To the
extent that you can apply the assumptions, the van’t Hoff
expression can also be used to predict the helical fraction as a
function of temperature in the vicinity of TM using
0 1 1ln HC
B M
Hs
k T T
and assuming that σ is independent of temperature.
Below we show the length dependence of the melting temperature. As the length of the chain
approaches infinite, the helix/coil transition becomes a step function in temperature. This trend
matches the expectations for a phase transition: in the thermodynamic limit, the infinite system,
will show discontinuous behavior. For finite lengths, the melting temperature Tm is lower that
for the infinite chain (Tm,∞), but approaches this value for n>300.

15
Calorimetric parameters for polypeptide chains
Side-chain only has a small effect on the helix–coil propagation parameter:
Sample HHC
0
(kcal mol‐1 residue‐1)
σ Other
Alanine-rich peptides Ac-Y(AEAAKA)8F-NH2
Ac-(AAKAA)kY-NH2
‒0.95 to ‒1.3 0.002
Poly(L-lysine) Poly(L-glutamate)
‒1.1 0.0025
Poly-alanine ‒0.95 0.003 s(0°C)=1.35; Alanine oligomers ‒0.85 ΔS0 = 3 cal mol‒1 res‒1 K‒1 Various homopolypeptides ~4 kJ ΔCp = ‒32 J/mol K res‒1
Free‐Energy Landscape
Finally, we investigate the free-energy landscape for the Zimm–Bragg model of the
helix–coil transition. The figure below shows the helical probability distribution and
corresponding energy landscape for different values of the reduced temperature kBT/Δϵ
for a chain length of n=40 and σ=10-3. Note that P(nH) is calculated from eq. (18) for all
but the all-coil state, which comes from eq. (16).

16
The cooperative model shows two-state behavior. At low temperature and high
temperature, the system is almost entirely in the all-helix or all-coil configuration,
respectively; however, at intermediate temperatures, the distribution of helical
configurations can be very broad. The least probable configuration is a chain with only
one helical segment.
This behavior looks much closer to the two-state behavior expected from phase-transition
behavior. The free energy has minima for nH = 0 and for nH > 1, and the free energy
difference between these states shifts with temperature to favor one or the other
minimum.

17
Two‐State Thermodynamics
Here we describe the basic thermodynamics of two-state systems, which are commonly used for
processes such as protein folding, binding, and DNA hybridization. Working with the example of
protein folding analyzed through the temperature-dependent folded protein content.
1
f F
u F
k FK
k U
where ϕF is the fraction of protein that is folded, and the fraction that is unfolded is (1 ‒ ϕF).
/
/ / /
1
1 1 1 1
o
o o o
F
G RT
F G RT H RT S R
K
K
K e
e e e
Define the melting temperature Tm as the temperature at which ϕF = 0.5. Then at Tm, G0 = 0 or
Tm = H0/S0. Characteristic melting curves for Tm = 300 K are below:
We can analyze the slope of curve at Tm using a van’t Hoff analysis:

18
dF
dT
dF
dKdK
dT
dF
dKK
d ln K
dTd ln K
dTH 0
RT 2
dF
dK K 2(1 K )2
dF
dT
TTm
H 0
4RTm2
since K 1 at Tm
This analysis assumes that there is no temperature dependence to ΔH, although we know well
that it does from our earlier discussion of hydrophobicity. A more realistic two-state model will
allow for a change in heat capacity between the U and F states that describes the temperature
dependence of the enthalpy and entropy.
0 0 0( ) ( ) n( ) lp mm mm
TG H T S C T T T
TT T T

Cooperativity
Andrei Tokmakoff 5/25/2017
19. Self‐Assembly1
Cooperative self-assembly refers to the the spontaneous formation of sophisticated structures
from many molecular units. Generally, we think of this as involving many molecules
(cooperative units), although single- and bi-molecular problems can be wrapped into this
description, as in the helix–coil transition. Examples include:
Peptides and proteins
o Protein folding, binding, and association
o Amyloid fibrilization
o Assembly of multi-protein complexes
o Viral capsid self-assembly
Nucleic acids
o DNA hybridization, DNA origami
o Folding and association of RNA structures: pseudoknots, ribozymes
Lipids
o Bilayer structures
o Micelle formation
Although molecular structures also assemble with the input of energy, the emphasis here in on
spontaneous self-assembly in the absence of external input.
1. D. Philp and J. F. Stoddart, Self-Assembly in Natural and Unnatural Systems, Angew. Chem. Int. Ed. 35 (11),
1154-1196 (1996).

2
Micelle Formation
In particular, we will focus on micellar structures formed from a single species of amphiphilic
molecule in aqueous solution.2 These are typically lipids or surfactants that have a charged or
polar head group linked to one or more long hydrocarbon chains.
SDS surfactant
(Sodium dodecylsulfate) DMPC phospholipid
(Dimyristoyl‐glycero‐phosphocholine)
Such amphiphiles assemble into a variety of structures, the
result of which depends critically on the concentration,
composition, and temperature of the system. For SDS
surfactant, micelles are favored. These condense
hydrophobic chains into a fluid like core and present the
charged head groups to the water. The formation of micelles
is observed above a critical micelle concentration (CMC). As the surfactant is dissolved, the
solution is primarily monomeric at low concentration, but micelles involving 30–100 molecules
suddenly appear for concentrations greater than the CMC.
2. D. H. Boal, Mechanics of the Cell, 2nd ed. (Cambridge University Press, Cambridge, UK, 2012), p. 250.
Reprinted from http://swartz-lab.epfl.ch/page-20594-en.html.
Micelles have a surprisingly
uniform size distribution.

3
To begin investigating this phenomenon, we can start by simplifying the equilibrium to a two-
state form:
nA An
Kn
[An]
[A]n eGmicelle
0 /kBT
Kn is the equilibrium constant for assembling a micelle with n amphiphiles from solution. n is the
called the aggregation number. The total number of A molecules present is the sum of the free
monomers and those monomers present in micelles: CTOT = [A] + n[An]. The fraction of
monomers present in micelles:
1
1
[ ] [ ] [ ]
[ ] [ ] 1 [ ]
nn n n
mi nTOT n n
n A n A nK A
C A n A nK A
(1)
This function has an inflection point at the CMC, for which the steepness of the transition
increases with n. Setting ϕmi = 0.5, we obtain the CMC (c0) as
1
10 [ ] ( )n
cmc nc A nK
Function steepens with aggregation number n:
Thus for large n, and cooperative micelle formation:
Gmicelle0 RT lnc
0
Note the similarity of eq. (1) to the results for fractional helicity in the helix-coil transition:
1
n
n
s
s
This similarity indicates that a cooperative model exists for micelle formation in which the
aggregation number reflects the number of cooperative units in the process. Cooperativity can be

4
obtained from models that require surmounting a high nucleation barrier before rapidly adding
many more molecules to reach the micelle composition.
The simplest description of such a process would proceed in a step-wise growth form (a zipper
model) for n copies of monomer A assembling into a single micelle An.
Examples of how the energy landscape looks as a
function of oligomerization number ν are shown on
the right. However, if you remove the short-range
correlation, overall we expect the shape of the
energy landscape to still be two-state depending on
the nucleation mechanism.
This picture is overly simple though, since it is not a one-dimensional chain problem. Rather, we
expect that there are equilibira connecting all possible aggregation number clusters to form larger
aggregates. A more appropriate description of the free energy barrier for nucleating a micelle is
similar to classical nucleation theory for forming a liquid droplet from vapor.

5
Classical Nucleation Theory3
Let’s summarize the thermodynamic theory for the nucleation of a liquid droplet by the
association of molecules from the vapor. The free energy for forming a droplet out of n
molecules (which we refer to as monomers) has two contributions: a surface energy term that
describes the energy needed to make droplet interface and a volume term that describes the
cohesive energy of the monomers.
nG a V
Note the similarity to our discussion of the hydrophobic effect, where γ was just the surface
tension of water. Δϵ is the bulk cohesive energy—a positive number. Since this is a
homogeneous cluster, we expect the cluster volume V to be proportional to n and, for a spherical
droplet, the surface area a to be proportional to V2/3 and thus n2/3 (remember our discussion of
hydrophobic collapse). To write this in terms of monomer units, we can express the total area in
terms of the average surface area per molecule in the droplet:
α=a/n
and as the monomer volume V0. Then the free energy is
2/30n VnG n (2)
and the chemical potential of the droplet as
01/3
0
2
3m
n
GV
nn
(3)
These competing effects result in a maximum in ΔG
versus n, which is known as the critical nucleation cluster
size n*. The free energy at n* is positive and called the
nucleation barrier ΔG*. We find n* by setting eq. (3)
equal to zero:
3
0
0
2
3n
V
and substituting into eq. (2)
30
20
(
7 (
4
2
)
)G
V
3. P. S. Richard, Nucleation: theory and applications to protein solutions and colloidal suspensions, J. Phys.:
Condens. Matter 19 (3), 033101 (2007).

6
For nucleation of a liquid droplet from vapor, if fewer than n* monomers associate, there is not
enough cohesive energy to allow the growth of a droplet and the nucleus will dissociate. If more
than n* monomers associate, the droplet is still unstable, but the direction of spontaneous change
will increase the size of the droplet and a liquid phase will grow from the nucleus.
The process of micelle formation requires a balance of attractive and repulsive forces that
stabilize an aggregate, which can depend on surface and volume terms. Thus the ΔGmicelle has a
similar form, but the signs of different factors may be positive or negative.

7
Why Are Micelles Uniform in Size?4
Micelles are formed by amphiphiles that want to bury hydrophobic chains and expose charged
head groups to water. Since a cavity must be formed for the micelle, the resulting surface tension
of the cavity (the hydrophobic effect) results in the system trying to minimize its surface area,
and thereby the number of molecules in the micelle. At the same time, the electrostatic repulsion
between headgroups results in driving force to increase the surface area per headgroup. These
competing effects result in an optimal micelle size.
We start by defining the chemical potential Δμn, which is the free energy per mole of
amphiphilic molecule A to assemble a micelle with n molecules. Instead of using n, we will try to
express the size of the micelle in terms of its surface area a and assume that it is spherical. Then,
the free energy for forming a cavity for the micelle grows as a, where γ is the surface tension.
The surface area is expressed as an average surface area spanned by the charged headgroup of a
monomer unit:
ae=a/n
The repulsion term is hard to predict and depends on many variables. There
are the electrostatic repulsions between head groups, but there is also the
entropic penalty for forming the micelle that depends on size. As an
approximation, we anticipate that the free energy should be inversely
proportional to surface area. Then the free energy for forming a micelle
with n molecules is
ee
n
xG a
ax
naan
(4)
where x is a constant.
4. K. Dill and S. Bromberg, Molecular Driving Forces: Statistical Thermodynamics in Biology, Chemistry,
Physics, and Nanoscience. (Taylor & Francis Group, New York, 2010); J. N. Israelachvili, Intermolecular and Surface Forces, 3rd ed. (Academic Press, Burlington, MA, 2011), Ch. 20.

8
Solving for Δμ=∂ΔG/∂n, differentiating it with respect to ea , and setting to zero, we find the
optimal micelle size, 0a , is
0 2a
x
n
(5)
Solving for x and substituting in eq. (4), we obtain the chemical potential as:
22 20 00
2 eee e
µ a a aaa a
a
It has a parabolic shape with a minimum at 0a .
Next, we can obtain the probability distribution for the micelle size as a function of head group
surface area and aggregation number
Pn exp n / k
BT
Pn(a
e) ~ exp
n (ae a
0)2
aek
BT
The relative populations of micelles are distributed in a Gaussian distribution about a0. The
distribution of sizes has a standard deviation (or polydispersity) given by
2e Bna k T
From a = 4πr2 = nae, we predict that the breadth of the micelle size distribution will scale
linearly in the micelle radius, and as the square root of temperature and molecule number.

9
Shape of Self‐Assembled Amphiphiles
Empirically it is observed that certain features of the molecular structure of amphiphilic
molecules and surfactants are correlated with the shape of the larger structures that they self-
assemble into. For instance, single long hydrocarbon tails with a sulfo- group (like SDS) tend to
aggregate into spherical micelles, whereas phosopholipids with two hydrocarbon chains (like
DMPC) prefer to form bilayers. Since structure formation is largely governed by the
hydrophobic effect, condensing the hydrophobic tails and driving the charged groups to a water
interfaces, this leads to the conclusion that the volume and packing of the hydrophobic tail plays
a key role in shape. While the molecular volume and the head group size and charge are fixed,
the fluid nature of the hydrocarbon chain allows the molecule to pack into different
configurations.
SDS (spherical micelles) DMPC (lipid bilayers)
This structural variability is captured by the packing parameter:
0
0e
Vp
a
where V0 and 0 are the volume and length of the hydrocarbon chain, and ae
is the average surface area per charged head group. V0/0 is relatively
constant at ~0.2 nm2, but the shape of the chain may vary from extended
(cylindrical) to compact (conical), which will favor a particular packing.

10
Empirically it is found that systems with p < ⅓ typically form micelles, for cylindrical structures
for ⅓ < p < ½, and for bilayer structures for ½ < p < 1. Simple geometric arguments can be made
to rationalize this observation. Taking a spherical aggregate with radius R and aggregation
number n as an example, we expect the ratio of the volume to the surface area to be
003 3
e
e
V nV R a RV
A na
Substituting into the packing parameter:
0
0 03e
V Rp
a
Now, even though the exact conformation of the hydrocarbon chain is not known, the length of
the hydrocarbon tail will not be longer than the radius of the micelle, i.e., 0 R . Therefore
p 1
3(spheres)
Similar arguments can be used to explain why extended lipid bilayers have 1p and cylinders
for p ≈ ½. In a more general sense, we note that the packing parameter is related to the curvature
of the aggregate surface. As p decreases below one, the aggregate forms an increasingly curved
surface. (Thus vesicles are expected to have ½ < p < 1). It is also possible to have p > 1. In this
case, the curvature also increases with increasing p, although the sign of the curvature inverts
(from convex to concave). Such conditions result in inverted structures, such as reverse micelles
in which water is confined in a spherical pool in contact with the charged headgroups, and the
hydrocarbon tails are project outward into a hydrophobic solvent.
Reprinted with permission from Z. Chu, C. A. Dreiss and Y. Feng, Chem. Soc. Rev. 42 (17), 7174-7203 (2013). Copyright 2013 Royal Society of Chemistry.
cylinder

11
Readings
1. J. N. Israelachvili, Intermolecular and Surface Forces, 3rd ed. (Academic Press, Burlington,
MA, 2011).

Macromolecular Processes
Andrei Tokmakoff 8/10/2016
20. Protein Folding Composed of 50–500 amino acids linked in 1D sequence by the polypeptide backbone
The amino acid physical and chemical properties of the 20 amino acids dictate an
intricate and functional 3D structure.
Folded structure is energetic ground state (Anfinsen)
Many proteins spontaneously refold into native form in vitro with high fidelity and high
speed.
Different approaches to studying this phenomenon:
How does the primary sequence encode the 3D structure?
Can you predict the 3D fold from a primary sequence?
Design a polypeptide chain that folds into a known structure.
What is the mechanism by which a disordered chain rapidly adopts its native
structure?
Our emphasis here is mechanistic. What drives this process? The physical properties of the
connected pendant chains interacting cooperatively give rise to the structure.
Reprinted from http://swift.cmbi.ru.nl/teach/Wageningen/IMAGE/aa_venn_diagram.png

2
It is said that the primary sequence dictates the three-dimensional structure, but this is not the
whole story, and it emphasizes a certain perspective. Certainly we need water, and defined
thermodynamic conditions in temperature, pH, and ionic strength. In a sense the protein is the
framework and the solvent is the glue. Folded proteins may not be as structured from crystal
structures, as one is led to believe.
Kinetics and Dynamics
Observed protein folding time scales span decades. Observations for protein folding typically
measured in ms, seconds, and minutes. This is the time scale for activated folding across a free-
energy barrier. The intrinsic time scale for the underlying diffusive processes that allow
conformations to evolve and local contacts to be formed through free diffusion is ps to μs. The
folding of small secondary structure happens on 0.1–1 μs for helices and ~1–10 μs for hairpins.
The fastest folding mini-proteins (20–30 residues) is ~1 μs.
Cooperativity
What drives this? Some hints:

3
Levinthal’s paradox1
The folded configuration cannot be found through a purely random search process.
Assume:
o 3 states/amino acid linkage
o 100 linkages
3100 = 5 x 1047 states
o Sample 10-13 sec/state
1027 years to sample
Two‐state thermodynamics
To all appearances, the system (often) behaves as if there are only two thermodynamic
states.
Entropy/Enthalpy
ΔG is a delicate balance of two large opposing energy contributions ΔH and TΔS.
1. C. Levinthal, Are there pathways for protein folding?, J. Chim. Phys. Phys.-Chim. Biol. 65, 44-45 (1968).

4
Cooperativity underlies these observations
Probability of forming one contact is higher if another contact is formed.
Zipping
Hydrophobic collapse
Protein Folding Conceptual Pictures
Traditional pictures rooted in classical thermodynamics and reaction kinetics.
Postulate particular sequence of events.
Focus on importance of a certain physical effect.
1) Framework or kinetic zipper
2) Hydrophobic collapse
3) Nucleation–condensation
Framework/Kinetic Zipper Model
Observation from peptides: secondary structures fold rapidly following nucleation.
Reprinted from James Chou (2008). http://cmcd.hms.harvard.edu/activities/_media/bcmp201/lecture7.pdf.
Reprinted with permission from N. T. Southall, K. A. Dill and A. D. J. Haymet, J. Phys. Chem. B 106, 521-533 (2002). Copyright 2002 American Chemical Society.
Reprinted from K. A. Dill, K. M. Fiebig and H. S. Chan, Proc. Natl. Acad. Sci. U. S. A. 90, 1942-1946 (1993). Copyright 1993 PNAS.

5
Secondary structure formation precedes tertiary organization.
Emphasis:
o Hierarchy and pathway
o Focus on backbone, secondary structure
Hydrophobic Collapse
Observation: protein structure has hydrophobic residues buried in center and
hydrophilic groups near surface.
An extended chain rapidly collapses to bury hydrophobic groups and thereby speeds
search for native contacts.
Collapsed state: molten globule
Secondary and tertiary structure form together following collapse.
Nucleation–Condensation
Nucleation of tertiary native contacts is important first step, and structure condenses
around that.
Some observations so far:
Importance of collective coordinates
Big challenge: We don’t know much about the unfolded state.

6
Models for Simulating Folding
Our study of folding mechanism and the statistical mechanical relationship between structure and
stability have been guided by models. Of these, simple reductionist models guided the
conceptual development from the statistical mechanics side, since full atom simulations were
initially intractable. We will focus on the simple models.
Reductionist Models
o Lattice Models
o Gō Models
o Coarse Grained
Atomistic
o Force fields
HP Model2
Chain of beads. Self-avoiding walk on square lattice.
2 types of beads: Hydrophobic (H) and polar (P).
H-H contacts are energetically favorable to H-P contacts.
more H collapse to compact state,
but many collapsed structures
more P well-solvated, doesn’t fold
~1:1 H:P optimal
Can be used for folding mechanism
using Monte Carlo.
Coarse‐Grained Models3
Hierarchy of various models that reduce protein structure to a set of interacting beads.
Gō Models4
2. K. F. Lau and K. A. Dill, A lattice statistical mechanics model of the conformational and sequence spaces of
proteins, Macromolecules 22, 3986-3997 (1989).
3 . V. Tozzini, Coarse-grained models for proteins, Curr. Opin. Struct. Biol. 15, 144-150 (2005).
4. Y. Ueda, H. Taketomi and N. Gō, Studies on protein folding, unfolding, and fluctuations by computer simulation. II. A. Three-dimensional lattice model of lysozyme, Biopolymers 17, 1531-1548 (1978).
Increasing level of molecular detail

7
Gō models and Gō-like models refer to a class of coarse-grained
models in which formation of structure is driven by a minimalist
interaction potential that drives the system to its native structure.
The folded state must be known.
Coarse grained
o Original: one bead per AA
o “Off-lattice model”
Native-state biasing potential
o Multiple forces in single interaction potential
o Need to know folded structure
o Increased simulation speed
o Doesn’t do well metastable intermediates or non-native contacts

8
Perspectives on Protein Folding Dynamics
These models have helped drive theoretical developments that provide alternate perspectives on
how proteins fold:
State Perspective
Interchange between states with defined configurations
What are the states, barriers and reaction coordinates?
Statistical Perspective
Change in global variables
Configurational entropy
Networks
Characterize conformational variation and network of
connectivity between them.
Reprinted with permission from V. A. Voelz, G. R. Bowman, K. Beauchamp and V. S. Pande, J. Am. Chem. Soc. 132, 1526-1528 (2010). Copyright 2010 American Chemical Society.
Reprinted with permission from C. R. Baiz, Y.-S. Lin, C. S. Peng, K. A. Beauchamp, V. A. Voelz, V. S. Pande and A. Tokmakoff, Biophys. J. 106, 1359-1370 (2014). Copyright Elsevier 2014.

9
The statistical perspective is important. The standard ways of talking about folding is in terms of
activated processes, in which we describe states that have defined structures, and which
exchange across barriers along a reaction coordinate. And the emphasis is on molecularly
interpreting these states. There is nothing formally wrong with that except that it is an
unsatisfying way of treating problems where one has entropic barriers.
Folding Funnels and Configurational Entropy
Helps with entropic barriers5
5. K. A. Dill, Polymer principles and protein folding, Protein Sci. 8, 1166-1180 (1999).
Configurational
Entropy
Energy

10
Transition State vs Ensemble Kinetics
Reprinted with permission from K. A. Dill, Protein Sci. 8, 1166-1180 (1999). John Wiley and Sons 1999.
Reprinted with permission from K. A. Dill, Protein Sci. 8, 1166-1180 (1999). John Wiley and Sons 1999.

Macromolecular Processes
Andrei Tokmakoff 07/01/2017
21. Binding and Association Molecular associations are at the heart of biological processes. Specific functional interactions
are present at every level of cellular activity. Some of the most important:
1) Proteins Interacting with Small Molecules and Ions
Enzyme/substrate interactions and catalysis
Ligand/receptor binding
Chemical energy transduction (for instance ATP)
Signaling (for instance neurotransmitters, cAMP)
Drug or inhibitor binding
Antibody binding antigen
Small molecule and ion transport
o Mb + O2 → MbO2
o Ion channels and transporters
2) Protein–Protein Interactions
Signaling and regulation networks
Receptors binding to ligands activate receptors
o GPCRs bind agonist/hormone for transmembrane signal transduction
Assembly and function of multi-protein complexes
o Replication machinery in replisome consists of multiple proteins including
DNA polymerase, DNA ligase, topoisomerase, helicase
o Kinetochore orchestrate interactions of chromatin and the motor proteins
that separate sister chromatids during cell division
3) Protein–Nucleic Acid Interactions
All steps in the central dogma
Transcription factor binding
DNA repair machinery
Ribozymes
In all of these examples, the common thread is a macromolecule, which typically executes a
conformational change during the interaction process. Conformational flexibility and entropy
changes during binding play an important role in describing these processes.

2
Thermodynamics of Bimolecular Reactions
To begin, we recognize that binding and association processes are bimolecular reactions. Let’s
describe the basics of this process. The simplest kinetic scheme for bimolecular association is
A B C (1)
A and B could be any two molecules that interact chemically or physically to result in a final
bound state; for instance, an enzyme and its substrate, a ligand and receptor, or two specifically
interacting proteins. From a mechanistic point of view, it is helpful to add an intermediate step:
A B AB C
Here AB refers to transient encounter complex, which may be a metastable kinetic intermediate
or a transition state. Then the initial step in this scheme reflects the rates of two molecules
diffusing into proximity of their mutual target sites (including proper alignments). The second
step is recognition and binding. It reflects the detailed chemical process needed to form specific
contacts, execute conformational rearrangements, or perform activated chemical reactions. We
separate these steps here to build a conceptual perspective, but in practice these processes may be
intimately intertwined.
Equilibrium Constant
Let’s start by reviewing the basic thermodynamics of bimolecular reactions, such as reaction
scheme (1). The thermodynamics is described in terms of the chemical potential for the
molecular species in the system (i = A,B,C)
, , ,j
ii p T N j i
Gµ
N
where Ni is the number of molecules of species i. The dependence of the chemical potential on
the concentration can be expressed as
00
ln ii i
cRT
c (2)
ci is the concentration of reactant i in mol L−1, and the standard state concentration is c0 = 1 mol
L−1. So the molar reaction free energy for scheme (1) is
0
,
ln
i ii
C A B
G
G RT K
(3)
i is the stoichiometric coefficient for component i. K is the reaction quotient

3
0
0 0
( / )
( / )( / )C
A B
c cK
c c c c
At equilibrium, 0G , so
0 ln aG RT K (4)
where the association constant Ka is the value of the reaction quotient under equilibrium
conditions. Dropping c0, with the understanding that we must express concentration in M units:
Ca
A B
cK
c c (5)
Since it is defined as a standard state quantity, Ka is a fundamental constant independent of
concentration and pressure or volume, and is only dependent on temperature. The inverse of Ka
is Kd the equilibrium constant for the C dissociation reaction C A B .
Concentration and Fraction Bound
Experimentally one controls the total mass TOT A B Cm m m m , or concentration
TOT C A Bc c c c (6)
The composition of system can be described by the fraction of concentration due to species i as
i
ci
cTOT
A
B
C 1
(7)
We can readily relate Ka to θi, but it is practical to set some specific constraint on the
composition here. If we constrain the A:B composition to be 1:1, which is enforced either by
initially mixing equal mole fractions of A and B, or by preparing the system initially with pure C,
then
2
2
4
(1 )
(1 2 )
Ca
C TOT
A
A TOT
Kc
c
(θA=θB) (8)
This expression might be used for mixing equimolar solutions of binding partners, such as
complementary DNA oligonucleotides. Using eq. (6) (with cA=cB) and (7) here, we can obtain
the composition as a function of total concentration fraction as a function of the total
concentration

4
C 1
2
Kac
TOT
1
2
Kac
TOT
2
1
A
1
21
C
In the case where A=B, applicable to homodimerization or hybridization of self-complementary
oligonucleotides, we rewrite scheme (1) as the association of monomers to form a dimer
2M D
and find:
22(1 )a D D TOTK c (9) 2(1 ) 2a M M TOTK c
11 1 1 8
4D TOT aTOT a
c Kc K
(10)
1M D
These expressions for the fraction of monomer and dimer, and the corresponding concentrations
of monomer and dimer are shown below. An increase in the total concentration results in a shift
of the equilibrium toward the dimer state. Note that cTOT = (9Ka)−1 = Kd/9 at θM = θD = 0.5,
For ligand receptor binding, ligand concentration will typically be much greater than that of the
receptor, and we are commonly interested in fraction of receptors that have a ligand bound,
θbound. Re-writing our association reaction as
L R LR LRa
L R
cK
c c
we write the fraction bound as

5
bound
c
LR
cR c
LR
c
LK
a
1 cL Ka
This is equivalent to a Langmuir absorption isotherm.
Temperature Dependence
The temperature dependence of Ka is governed by eq. (4) and the fundamental relation
0 0 0G T H T T S T (11)
Under the assumption that ΔH0 and ΔS0 are temperature independent, we find
0 0
( ) exp a aa
H SK
RT RT
(12)
This allows us to describe the temperature-dependent composition of a system using the
expressions above for θi. While eq. (12) allows you to predict a melting curve for a given set of
thermodynamic parameters, it is more difficult to use it to extract those parameters from
experiments because it only relates the value of Kd at one temperature to another.
Temperature is often used to thermally dissociate or melt dsDNA or proteins, and the analysis of
these experiments requires that we define a reference temperature. In the case of DNA melting,
the most common and readily accessible reference temperature is the melting temperature Tm
defined as the point where the mole fractions of ssDNA (monomer) and dsDNA (dimer) are
equal, θM = θD = 0.5. This definition is practically motivated, since DNA melting curves typically
have high and low temperature limits that correspond to pure dimer or pure monomer. Then Tm is
commonly associated with the inflection point of the melting curve or the peak of the first
derivative of the melting curve. From eq. (9), we see that the equilibrium constants for the
association and dissociation reaction are given by the total concentration of DNA: Ka(Tm) =
Kd(Tm)−1 = ctot−1 and ΔGd
0(Tm) = ‒RTmlnctot. Furthermore, eq. (12) implies Tm = ΔH0/ΔS0.
The examples below show the dependence of melting curves on thermodynamic parameters, Tm,
and concentration. These examples set a constant value of Tm (ΔH0/ΔS0). The concentration
dependence is plotted for ΔH0 = 15 kcal mol−1 and ΔS0 = 50 cal mol−1 K−1.

6
For conformational changes in macromolecules, it is expected that the enthalpy and entropy will
be temperature dependent. Drawing from the definition of the heat capacity,
, ,N P N Pp
H STC
T T
we can describe the temperature dependence of ΔH0 and ΔS0 by integrating from a reference
temperature T0 to T. If ΔCp is independent of temperature over a small enough temperature range,
then we obtain a linear temperature dependence to the enthalpy and entropy of the form
0 000( ) pH T H C TT T (13)
00 0
0
( ) lnp
TS T TS C
T
(14)
These expressions allow us to relate values of ΔH0, ΔS0, and ΔG0 at temperature T to its value at
the reference temperature T0. From these expressions, we obtain a more accurate description of
the temperature dependence of the equilibrium constant is
0 0
1 l( ) exp npm m md
m
CH S T TK T
RT R R T T
(15)
where 0 0 ( )m mH H T and 0 0 ( )m mS S T are the enthalpy and entropy for the dissociation
reaction evaluated at Tm.

7
Statistical Thermodynamics of Bimolecular Reactions
Statistical mechanics can be used to calculate Ka on the basis of the partition function. The
canonical partition function Q is related to the Helmholtz free energy through
lnBF k T Q (16)
Q eE /kBT
(17)
where the sum is over all microstates (a particular configuration of the molecular constituents to
a macroscopic system), Boltzmann weighted by the energy of that microstate Eα. The chemical
potential of molecular species i is given by
µi k
BT
lnQ
Ni
V ,T , N ji
(18)
We will assume that we can partition Q into contributions from different molecular components
of a reacting system such that
Q Qi
i (19)
The ability to separate the partition function stems from the assumption that certain degrees of
freedom are separable from each other. When two sub-systems are independent of one another,
their free energies should add (FTOT = F1 + F2) and therefore their partition functions are
separable into products: QTOT = Q1Q2. Generally this separability is a result of being able to write
the Hamiltonian as HTOT = H1 + H2, which results in the microstate energy being expressed as a
sum of two independent parts: Eα = Eα,1+Eα,2. In addition to separating the different molecular
species, it is also very helpful to separate the translational and internal degrees of freedom for
each species, Qi = Qi,transQi,int. The entropy of mixing originates from the translational partition
function, and therefore will be used to describe concentration dependence.
For Ni non-interacting, indistinguishable molecules, we can relate the canonical and molecular
partition function qi for component i as
!
iNi
ii
N (20)
and using Sterling’s approximation we obtain the chemical potential,
ln ii
i
qRT
N (21)
Following the reasoning in eqs. (2)–(5), we can write the equilibrium constant as

8
C Ca
A B A B
N qK V
N N q q (22)
This expression reflects that the equilibrium constant is related to the stoichiometrically scaled
ratio of molecular partition functions per unit volume / i
a iiK q V
. Then the standards
binding free energy is determined by eq. (4).

9
DNA Hybridization2
To illustrate the use of statistical thermodynamics to describe binding, we discuss simple models
for the hybridization or melting of DNA. These models are similar to our description of the
helix–coil transition in their approach. These do not distinguish the different nucleobases, only
considering nucleotides along a chain that are paired (bp) or free (f).
Consider the case of the pairing between self-complementary oligonucleotides.
S S D
S refers to any fully dissociated ssDNA and D to any dimer forms that involve two strands which
have at least one base pair formed. We can then follow expressions for monomer–dimer
equilibria above. The equilibrium constant for the association of single strands is
2D
aS
cK
c (23)
This equilibrium constant is determined by the concentration-dependent free-energy barrier for
two strands to diffuse into contact and create the first base pair. If the total concentration of
molecules present is either monomer or dimer, the form is
2tot S DC c c (24)
then the fraction of the DNA strands in the dimer form is
2 D
Dtot
c
C (25)
and eq. (10) leads to
1 1 21 (4 ) (1 (4 ) ) 1D a tot a totK C K C (26)
We see that at the total concentration, which results in a dimer fraction 0.5D , the association
constant is obtained from 1(9 )a totK C . This is a traditional description of the thermodynamics
of a monomer–dimer equilibrium.
We can calculate Ka from the molecular partition functions for the S and D states:
2D
aS
qK
q
2. C. R. Cantor and P. R. Schimmel, Biophysical Chemistry Part III: The Behavior of Biological Macromolecules.
(W. H. Freeman, San Francisco, 1980), Ch. 20; D. Poland and H. A. Scheraga, Theory of Helix–Coil Transitions in Biopolymers. (Academic Press, New York, 1970).

10
Different models for hybridization will vary in the form of these partition functions. For either
state, we can separate the partition function into contributions from the conformational degrees
of freedom relevant to the base-pairing and hybridization, and other degrees of freedom, qi =
qi,confqi,ext. Assuming that the external degrees of freedom will be largely of an entropic nature,
we neglect an explicit calculation and factor out the external degrees of freedom by defining the
variable γ:
,2
,
D ext tot
S ext
q C
q
then
22 2,int ,int
,int ,int
1 1 14 4
S SD
D D
q q
q q
Short Oligonucleotides: The Zipper Model
For short oligonucleotide hybridization, a common (and reasonable) approximation is the single
stretch model, which assumed that base-pairing will only occur as a single continuous stretch of
base pairs. This is reasonable for short oligomers (n < 20) where two distinct helical stretches
separated by a bubble (loop) are unlikely given the persistence length of dsDNA. The zipper
model refers to the single-stretch case with “perfect matching”, in which only pairing between
the bases in precisely sequence-aligned DNA strands is counted. As a result of these two
approximations, the only dissociated base pairs observed in this
model appear at the end of a chain (fraying).
The number of bases in a single strand is n and the number of
bases that are paired is nbp. For the dimer, we consider all
configurations that have at least one base pair formed. The dimer partition function can be
written as
D,int1
1
,
( 1)
bp
bp
bp
bp
nn
bpn
nn
bpn
q n g n n s
n n s
(27)
Here g is the number of ways of arranging nbp continuous base pairs on a strand with length n; σ
is the statistical weight for nucleating the first base pair; and s is the statistical weight for
forming a base pair next to an already-paired segment: /bp Bk Ts e . Therefore, in the zipper
model, the equilibrium constant in eq. (23) between ssDNA and dimers involving at least one

11
intact base pair is: Kzip = σs. In the case of homogeneous polynucleotide chains, in which sliding
of registry between chains is allowed: 2D,int 1
( 1) bp
bp
n n
bpnq n n n s
. The sum in eq. (27)
can be evaluated exactly, giving
1,int 2
( 1)( 1)
nD
sq n s n s n
s
(28)
In the case that s > 1 ( 0bp ) and n≫1, ,intDq → σsn. Also, the probability distribution of
helical segments is
,int
( 1)( , )
bpn
bpbp bp
D
n n sP n n
q
1≤ nbp ≤ n
The plot below shows illustrations of the probability density and associated energy landscape for
a narrow range of s across the helix–coil transition. These figures illustrate a duplex state that
always has a single free-energy minimum characterized by frayed configurations.
In addition to the fraction of molecules that associate to form a dimer, we must also consider the
fraction of contacts that successfully form a base pair in the dimer state
bpbp
n
n
We can evaluate this using the identity
H
s qn
q s
Using eq. (28) we have
2 1
1
( 2) ( 2)
( 1)( ( 1) )
n n
bp n
ns n s n s n
n s s s n n

12
Similar to the helix–coil transition in polypeptides, θbp shows cooperative behavior with a
transition centered at s = 1, which gets steeper with increasing n and decreasing σ.
Finally, we can write the total fraction of nucleobases that participate in a base pair as the
product of the fraction of the DNA strands that are associated in a dimer form, and the average
fraction of bases of the dimer that are paired.
tot D bp

13
Bimolecular Kinetics
Returning to our basic two-state scheme, we define the rate constants ka and kd for the
association and dissociation reactions:
a
d
k
kA B C
From detailed balance, which requires that the total flux for the forward and back reactions be
equal under equilibrium conditions:
aa
d
kK
k
The units for Ka are M−1, M−1s-1 for ka, and s−1 for kd.
For the case where we explicitly consider the AB encounter complex:
1 2
1 2
k k
k kA B CAB
Schemes of this sort are referred to as reaction–diffusion problems. Note, this corresponds to the
scheme used in Michaelis–Menten kinetics for enzyme catalysis, where AB is an enzyme–
substrate complex prior to the catalytic step.
The kinetic equations corresponding to this scheme are often solved with the help of a steady-
state approximation (∂[AB]/∂t ≈ 0), leading to
1 2 1 2
1 21 2
[ ][ ][ ] [ ]a d
a d
d Ck A B k C
dtk k k k
k kk kk k
Let’s look at the limiting scenarios:
1) Diffusion controlled reactions refer to the case when reaction or final association is
immediate once A and B diffusively encounter one another, i.e., k2 k–1. Then the
observed rate of product formation ka ≈ k1, and we can then equate k1 with the diffusion-
limited association rate we have already discussed.
2) Pre-Equilibrium. When the reaction is limited by the chemical step, an equilibrium is
established by which A and B can associate and dissociate many times prior to reaction,
and the AB complex establishes a pre-equilibrium with the unbound partners defined by a
nonspecific association constant 1 1aK k k . Then the observed association rate is
2a ak k K .

14
What if both diffusion and reaction within encounter complex matter? That is the two rates
1 2k k .
a rxnk kA B AB C
Now all the rates matter. This can be solved in the same manner that we did for diffusion to
capture by a sphere, but with boundary conditions that have finite concentration of reactive
species at the critical radius. The steady-state solution gives:
keff
kak
rxn
ka k
rxn
keff1 k
a1 k
rxn1
keff is the effective rate of forming the product C. It depends on the association rate ka (or k1) and
krxn is an effective forward reaction rate that depends on k2 and k–1.
Competing Factors in Diffusion–Reaction Processes
In diffusion–reaction processes, there are two competing factors that govern the outcome of the
binding process. These are another manifestation of the familiar enthalpy–entropy compensation
effects we have seen before. There is a competition between enthalpically favorable contacts in
the bound state and the favorable entropy for the configurational space available to the unbound
partners. Overall, there must be some favorable driving force for the interaction, which can be
expressed in terms of a binding potential UAB(R) that favors the bound state. On the other hand,
for any one molecule A, the translational configuration space available to the partner B will grow
as R2.
We can put these concepts together in a simple model.1 The probability of finding B at a distance
R from A is
1 ( ) 2( ) 4U R kTP R dR Q e R dR
where Q is a normalization constant. Then we can define a free energy along the radial
coordinate
2
( ) ln ( )
( ) ln ln
B
B
F R k T P R dR
U R k T R Q
1. D. A. Beard and H. Qian, Chemical Biophysics; Quantitative Analysis of Cellular Systems. (Cambridge
University Press, Cambridge, UK, 2008).

15
Here F(R) applies to a single A-B pair, and therefore the free energy drops continuously as R
increases. This corresponds to the infinitely dilute limit, under which circumstance the partners
will never bind. However, in practice there is a finite volume and concentration for the two
partners. We only need to know the distance to the nearest possible binding partner RAB . We
can then put an upper bound on the radii sampled on this free energy surface. In the simplest
approximation, we can determine a cut off radius in terms of the volume available to each B,
which is the inverse of the B concentration: 3 143 [ ]cr B . Then, the probability of finding the
partners in the bound state is
* ( )/ 2
0
( )/ 2
0
4
4
B
cB
r F r k T
a r F r k T
e r drP
e r dr
At a more molecular scale, the rates of molecular association can be related to diffusion on a
potential of mean force. g(r) is the radial distribution function that describes the radial variation
of B density about A, and is related to the potential of mean force W(r) through
( ) exp[ ( ) / ]Bg r W r k T . Then the association rate obtained from the flux at a radius defined by
the association barrier ( †r r ) is
†
11 ( )24 ( ) BW r k Ta r
k dr r D r e
Here D(r) is the radial diffusion coefficient that describes the relative diffusion of A and B. The
spatial dependence reflects the fact that at small r the molecules do not really diffuse
independently of one another.
F(R)entropic drive to dissociate (single pair)
critical radius r‡
Ene
rgy

16
For weakly attractive:
or structural/large solutes or encounter complex

17
Diffusion‐Limited Reactions2
Association Rate
The diffusion-limited association rate is typically approximated from the expression for the
relative diffusion of A and B with an effective diffusion constant D = DA + DB to within a critical
encounter radius R0 = RA + RB, as described earlier.
04a A Bk R f D D
One can approximate association rates between two diffusing partners using the Stokes–Einstein
expression: 6A B AD k T R . For two identical spheres (i.e., dimerization) in water at T = 300
K, where η ~ 1 cP = 100 kg m−1 s−1,
9 1 186.6 10
3B
a
k Tk M s
Note that this model predicts that the association rate is not dependent on the size or mass of the
object.
For bimolecular reactions, the diffusion may also include those orientational factors that bring
two binding sites into proximity. Several studies have investigated these geometric effects.
Example: Spheres with small binding patches
The combined probability that two binding patches are correctly oriented in both
reference frames and that both are rotated into the correct azimuthal angle is:
2 2
1 1(1 cos ) (1 cos )
2 21
16
ABr A B
A B AB
P
During diffusive encounter in dilute solution, once two partners collide but do not react, there is
a high probability of re-colliding with the same partner before diffusing over a longer range to a
2. D. Shoup, G. Lipari and A. Szabo, Diffusion-controlled bimolecular reaction rates. The effect of rotational
diffusion and orientation constraints, Biophys. J. 36 (3), 697-714 (1981); D. Shoup and A. Szabo, Role of diffusion in ligand binding to macromolecules and cell-bound receptors, Biophys. J. 40 (1), 33-39 (1982).

18
new partner. Depending on concentration and the presence of interaction potentials, there may be
5–50 microcollisions with the same partner before encountering a new partner.
Diffusion‐Limited Dissociation Rate
For the limit where associations are weak, k1 and k–1 are fast and in equilibrium, and the
dissociation is diffusion limited. Then we can calculate k–1
1
1
k
kA B AB
Now we consider boundary conditions for flux moving away from a sphere such that
1
30 0
( ) 0
4
3
B
B
C
C R R
The boundary condition for concentration at the surface of the sphere is written so that the
number density is one molecule per sphere.
The steady state distribution of B is found to be
20
3( )
4BC rR r
The dissociation flux at the surface is
0
40
3
4B B
Br R
C DJ D
r R
and the dissociation frequency is
2 20 0
3
4BDJ
R R
When we also consider the dissociative flux for the other partner in the association reaction,
21 03d A Bk k RD D
Written in a more general way for a system that may have an interaction potential

19
0
0
* 30
3 ( ) 20
43
43
U R kT
dU r kT
R
Dek DR R
R e r dr
Note that equilibrium constants do not depend on D for diffusion-limited association/dissociation
20
30 0
3 3
4 4D
DA
DRkK
k R D R
Note this is the inverse of the volume of a sphere.

20
Protein Recognition and Binding
The description of how a protein recognizes and binds a target is commonly discussed in terms
of conceptual models.
Enzyme/Substrate Binding
Lock-and-Key (Emil Fisher)
Emphasizes shape complementarity
Substrate typically rigid
Concepts rooted in initial and final structure
Does not directly address recognition
But protein-binding reactions typically involve conformational changes. Domain flexibility can
give rise to dramatic increase in binding affinity. A significant conformational change/fluctuation
may be needed to allow access to the binding pocket.
For binding a substrate, two models vary in the order of events for conformational change vs.
binding event:
1) Induced fit (Daniel Koshland)
2) Conformational selection:Pre-existing equilibrium established during which enzyme
explores a variety of conformations.
Protein–Protein Interactions
Appreciation that structure is not the only variable
Coupled folding and binding
o Fold on contact
o Fly-casting
Both partners may be flexible

21
Forces Guiding Binding
Electrostatics
Electrostatics play a role at long and short range
o Long-range nonspecific interactions accelerate diffusive encounter
o Short range guides specific contacts
Electrostatic complementarity
Electrostatic steering
van der Waals, π-π stacking
Shape and Geometry
Shape complementarity
Orientational registry
Folding
Anchoring residues
Hydrogen Bonding
Short range
Cross over from electrostatic to more charge transfer with strong HBs (like DNA,
protein–DNA binding)
Important in specificity

22
Solvation/Desolvation
To bind, a ligand needs to desolvate the active site
Bimolecular contacts will displace water
Water often intimate binding participant (crystallographic waters)
Hydrophobic patches
Charge reconfiguration in electrolyte solutions at binding interface
Electrostatic forces from water
Depletion Forces
Entropic effect
Fluctuations that lead to an imbalance of forces that drives particles together
o Crowding/Caging
Hydrophobicity
o Dewetting and Interfacial Fluctuations

23
Folding/Conformational Change
Disorder increases hydrodynamic volume
Coupled folding and binding
o Fly-casting mechanism
Partially unfolded partners
Long-range non-native interaction
Gradual decrease in free energy

24
Specificity in Recognition and Binding
Specificity in Recognition
What determines the ability for a protein to recognize a specific target amongst many partners?
To start, let’s run a simple calculation. Take the case that a protein (transcription factor) has to
recognize a string of n sequential nucleotides among a total of N bases in a dsDNA.
Assume that each of the four bases (ATGC) is present with equal probability among the
N bases, and that there are no enthalpic differences for binding to a particular base.
Also, the recognition of a particular base is independent of the other bases in the
sequence. (In practice this is a poor assumption).
The probability of finding a particular n nucleotide sequence amongst all n nucleotide
strings is
1
4
n
For a particular n nucleotide sequence to be unique among a random sequence of N bases,
we need
1
4
n
1
N
Therefore we can say
ln
ln 4
Nn
Example
For the case that you want to define a unique binding site among N = 65k base pairs:
A sequence of n = ln (65000)/ln(4) ≈ 8 base pairs should statistically guarantee a
unique binding site.
n = 9 → 262 kbp
This example illustrates that simple statistical considerations and the diversity of base
combinations can provide a certain level of specificity in binding, but that other
considerations are important for high fidelity binding. These considerations include the
energetics of binding, the presence of multiple binding motifs for a base, and base-
sequence specific binding motifs.

25
Energetics of Binding
We also need to think about the strength of interaction. Let’s assume that the transcription factor
has a nonspecific binding interaction with DNA that is weak, but a strong interaction for the
target sequence. We quantify these through:
∆G1: nonspecific binding
∆G2: specific binding
Next, let’s consider the degeneracy of possible binding sites:
gn: number of nonspecific binding sites = (N – n) or since N ≫n: (N – n) ≈ N
gs: number of sites that define the specific interaction: n
The probability of having a binding partner bound to a nonspecific sequence is
Pnonsp
gn eG1 kT
gn eG1 kT gs eG2 kT
(N n)eG1 kT
(N n)eG1 kT neG2 kT
1
1nN
eG kT
where ∆G = ∆G2 – ∆G1.
We do not want to have a high probability of nonspecific binding, so let’s minimize Pnonsp
.
Solving for ΔG, and recognizing P
nonsp1,
G kBT ln
N
n Pnonsp
Suppose we want to have a probability of nonspecific binding to any region of DNA that is
Pnonsp
1% . For N = 106 and n = 10, we find
∆G ≈ –16kBT or ‒1.6kBT/nucleotide
for the probability that the partner being specifically bound with Psp 99% .

26
Readings
1. G. Schreiber, G. Haran and H. X. Zhou, Fundamental aspects of protein−protein association
kinetics, Chem. Rev. 109 (3), 839-860 (2009).
2. D. Shoup, G. Lipari and A. Szabo, Diffusion-controlled bimolecular reaction rates. The effect
of rotational diffusion and orientation constraints, Biophys. J. 36 (3), 697-714 (1981).
3. D. Shoup and A. Szabo, Role of diffusion in ligand binding to macromolecules and cell-
bound receptors, Biophys. J. 40 (1), 33-39 (1982).

Dynamics and Kinetics
Andrei Tokmakoff 06/03/2016
22. Biophysical Reaction Dynamics
Concepts and Definitions
Time-dependent problems in molecular biophysics: How do molecular systems change? How
does a molecular system change its microscopic configuration? How are molecules transported?
How does a system sample its thermodynamically accessible states?
Two types of descriptions of time-dependent processes:
1) Kinetics: Describes the rates of interconversion between states. This is typically
measured by most experiments. It does not directly explain how processes happen, but it
can be used to predict the time-dependent behavior of populations from a proposed
mechanism.
2) Dynamics: A description of the time-evolving molecular structures involved in a process,
with the objective of gaining insight into mechanism. At a molecular level, this
information is typically more readily available from dynamical simulations of a model
than from experiments.
There is no single way to describe biophysical kinetics and dynamics, so we will survey a few
approaches. The emphasis here will be on the description and analysis of time-dependent
phenomena, and not on the experimental or computational methods used to obtain the data.
Two common classes of problems:
1) Barrier crossing or activated processes: For a solution phase process, evolution
between two or more states separated by a barrier whose energy is kBT. A description
of “rare events” when the system rapidly jumps between states. Includes chemical
reactions described by transition-state theory. We’ll look at two state problems.
2) Diffusion processes: Transport in the absence of significant enthalpic barriers. Many
small barriers on the scale of kBT lead to “friction”, rapid randomization of momenta, and
thereby diffusion.
Now let’s start with some basic definitions of terms we will use often:
Coordinates
Refers to many types of variables that are used to describe the structure or configuration of a
system. For instance, this may refer to the positions of atoms in a MD simulation as a function of
time rN,t, or these Cartesian variables might be transformed onto a set of internal coordinates
(such as bond lengths, bond angles, and torsion angles), or these positions may be projected onto
a different collective coordinate.

2
Unlike our simple lattice models, the transformation from atomic to collective coordinate is
complex when the objective is to calculate a partition function, since the atomic degrees of
freedom are all correlated.
Collective coordinate
A coordinate that reflects a sum/projection over multiple internal variables—from a
high-dimensional space to a lower one.
Example: Solvent coordinate in electron transfer. In polar solvation, the position of
the electron is governed by the stabilization by the configuration of solvent dipoles.
An effective collective coordinate could be the difference in electrostatic potential
between the donor and acceptor sites: q ~ ΦA‒ΦD.
Example: RMSD variation of structure with coordinates from a
reference state.
20
1
1 n
i ii
RMSDn
r r
where r is the position of an atom in an n atom molecule.
Sometimes the term “order parameter” gets used to describe a collective coordinate.
This term originated in the description of changes of symmetry at phase transitions,
and is a more specific term than order parameter. While order parameters are
collective variables, collective variables are not necessarily order parameters.
Reaction coordinate
An internal variable that describes the forward progress of a reaction or process.
Typically an abstract quantity, and not a simple configurational or geometrical
coordinate. In making a connection to molecular structure, often the optimal reaction
coordinate is not known or cannot be described, and so we talk about a “good reaction
coordinate” as a collective variable that is a good approximate description of the
progress of the reaction.

3
Energy Landscape
A structure is characterized by an energy of formation. There are many forms of energy that we
will use, including free energy (G, A), internal energy or enthalpy (E, H), interaction potential
(U, V), … so we will have to be careful to define the energy for a problem. Most of the time,
though, we are interested in free energy.
The energy landscape is used to express the relative stability of different states, the position and
magnitude of barriers between states, and possible configurational entropy of certain states. It is
closely related to the free energy of the system, and is often used synonymously with the
potential of mean force. The energy landscape expresses how the energy of a system (typically,
but it is not limited to, free energy) depends on one or more coordinates of the system. It is often
used as a free energy analog of a potential energy surface. For many-particle systems, they can
be presented as a reduced dimensional surface by projecting onto one or a few degrees of
freedom of interest, by integrating over the remaining degrees of freedom.
“Energy landscapes” represent the free energy (or rather the negative of the logarithm of the
probability) along a particular coordinate. Let’s remind ourselves of some definitions. The free
energy of the system is calculated from lnBA k T Z
where Z is the partition function. The free energy is a number that reflects the thermally
weighted number of microstates available to the system. The free energy determines the relative
probability of occupying two states of the system:
/A B BA A k TA
B
Pe
P
The energy landscape is most closely related to a potential of mean force
( ) ln ( )BF x k T P x
P(x) is the probability density that reflects the probability for observing the system at a position
x. As such it is equivalent to decomposing the free energy as a function of the coordinate x.
Whereas the partition function is evaluated by integrating a Boltzmann weighting over all
degrees of freedom, P(x) is obtained by integrating over all degrees of freedom except x.

4
States
We will use the term “state” in the thermodynamic sense: a distinguishable minimum or basin on
free energy surface. States refer to a region of phase–space where you persist long compared to
thermal fluctuations. The regions where there is a high probability of observing the system. One
state is distinguished from another kinetically by a time-scale separation. The rate of evolving
within a state is faster than the rate of transition between states.
Configuration
Can refer to a distinct microstate or a structure that has been averaged over a local
energy basin. You average over configurations (integrate over q) to get states
(macrostates).
Transition state
The transition state or transition–state ensemble, often labelled ‡, refers to those
barrier configurations that have equal probability of making a transition forward or
backward.
It’s not really a “state” by our definition, but a barrier or saddle point along a reaction
coordinate.

5
Computing Dynamics
There are a number of ways of computationally modeling time-
dependent processes in molecular biophysics. These methods
integrate equations of motion for the molecular degrees of freedom
evolving under a classical force–field interaction potential, a
quantum mechanical Hamiltonian, or an energy landscape that could
be phenomenological or atomistically detailed. Examples include
using classical force fields to propagate Newton’s equation of motion, integrating the
Schrödinger equation, or integrating the Langevin equation on a potential of mean force. Since
our interest is more on the description of computational or experimental data, this will just be a
brief overview.
Classical Dynamics from a Potential (Force Field)
An overview of how to integrate Newton’s equation of motion, leaving out many important
details. This scheme, often used in MD simulations, is commonly called a Verlet integration.
1) Set initial positions r and velocities v of particles. For equilibrium simulations, the
velocities are chosen from a Maxwell–Boltzmann distribution.
2) Take small successive steps in time δt, calculating the velocities and positions of the
particles for the following time step.
At each time step calculate the forces on
each particle by calculating the gradient of
the potential with respect to r: F(r)=–V(r). The force is proportional to the
acceleration a = F/m, where m is the mass of
the particle.
Now propagate the position of each particle
n in time from time step i to time step i+1 as
rn,i+1 = rn,i + vn,i δt + an,i δt2. This is a good
point to save information for the system at a
particular time.
Calculate the new velocity for each particle
from vn,i+1 = [rn,i+1‒rn,i]/δt.
3) Now, you can increment the time step and repeat
step iteratively.

6
Langevin Dynamics
Building on our discussion of Brownian motion, the Langevin equation is an equation of motion
for a particle acting under the influence of a fixed potential U, friction, and a time-dependent
random force. Writing it in one dimension:
ma fpotential
ffriction
frandom
t m2 x
t2
Ux
x
t f
rt
The random force reflects the equilibrium thermal fluctuations acting on the particle, and is the
source of the friction on the particle. In the Markovian limit, the friction coefficient ζ and the
random force fr(t) are related through a fluctuation–dissipation relationship:
0 0
0
2
r
r r B
f t
f t f t k T t t
Also, the diffusion constant is D = kBT/ζ, and the time scale for loss of velocity correlations is τc
= γ−1 = m/ζ. The Langevin equation has high and low friction limits. In the low friction limit
(ζ→0), the influence of friction and random force is minimal, and the behavior is dominated by
the inertial motion of the particle. In the high friction limit, the particle’s behavior, being
dominated by ζ, is diffusive. The limit is defined by any two of the following four linearly
related variables: ζ, D, T, and fr2 . The high and low friction limit are also referred to as the low
and high temperature limits: 2 / 2r Bf k T .

7
Example: Trajectory for a particle on a bistable potential from Langevin dynamics
Low Friction High friction
time
5kBT

8
Representations of Dynamics
We will survey different representation of time-dependent processes using examples from one-
dimension.
Trajectories
Watch the continuous time-dependent behavior of one or more particles/molecules in the system.
Time‐dependent structural configurations
A molecular dynamics trajectory will give you the position of all atoms as a function of
time rN,t. Although there is an enormous amount of information in such a trajectory,
the raw data is often overwhelming and not of particularly high value itself. However, it
is possible to project this high dimensional information in structural coordinates onto one
or more collective variables ξ that forms a more meaningful representation of the
dynamics, ξ(t). Alternatively, single molecule experiments can provide a chronological
sequence of the states visited by molecule.
State trajectories: Time‐dependent occupation of states
A discretized representation of which state of the system the particle occupies. Requires
that you define the boundaries of a state.
Example: A two state trajectory for an equilibrium A B , where the time-dependent
probability of being in state A is:
1 ( )( )
0 ( )A
if tP t
if t
‡
‡

9
Time‐Dependent Probability Distributions and Fluxes
With sufficient sampling, one can average over trajectories in order to develop a time-dependent
probability distribution P(ξ,t) for the non-equilibrium evolution of an initial state.
State Populations: Kinetics
Average over states to get time-dependent populations of those states.
state A( , ) ( )AP t d P t
Alternatively, one can obtain the same information by analyzing waiting time
distributions from state trajectories, as described below.
The kinetics can be modeled with rate equations/master equation: P P= k .
Time‐Correlation Functions
Time-correlation functions are commonly used to characterize trajectories of a fluctuating
observable. These are described below.

10
Analyzing Trajectories
Waiting‐Time Distributions, Pw
τW: Waiting time between arriving and leaving a state
Pk: or P(k,t)
Probability of making k jumps during a time interval,
t. → Survival probability
Pw: Probability of waiting a time τw between jumps?
Waiting time distribution → FPT distribution
Let’s relate these…
Assume independent events. No memory of history – where it was in trajectory.
Flux: RdPJ
dt
J: Probability of jump during ∆t. ∆t is small enough that J 1, but long enough to lose
memory of earlier configurations.
The probability of seeing k jumps during a time interval t, where t is divided into N intervals of
width Δt (t = N∆t) is given by the binomial distribution
P(k, N )
N !
k!(N k)!J k (1 J )Nk (1)
Here N≫k. Define rate λ in terms of the average number of jumps per unit time
1
W
kt
J t → t
JN
Substituting this into eq. (1) Error! Reference source not found.. For N ≫k, recognize
(1 ) (1 ) 1N
N k N ttJ J e
N
The last step is exact for lim N → ∞.
Poisson distribution for the number of jumps in time t.
1/21/22
( ),,
tP t tk t
P k t

11
Fluctuations: 1/2/ ( ),P tk t
OK, now what about Pw the waiting time distribution?
Consider the probability of not jumping during time t:
–0, tkP t e
As you wait longer and longer, the probability that you stay in the initial state drops
exponentially. Note that Pk(0, t) is related to Pw by integration over distribution of
waiting times.
( ) (0, ) twt
P t dt P t e
0
probability of staying for t
probability of jumping within t
wt
t
w
P dt
P dt
Probability of jumping between t and t+Δt:
1 2( ) 11 1
1
w N
N kt
P t t k t k tk t k t
k t ke tk t
Pw et
tpw(t)t
0
2 22
1/
1
w
w w
→ the average waiting time is the lifetime (1/λ)
Reduction of Complex Kinetics from Trajectories
Integrating over trajectories gives probability densities.
Need to choose a region of space to integrate over and thereby define states:
Probability of no decay for time <t
decay on last

12
States: Clustered regions of phase space that have high probability or long persistence.
Markovian states: Spend enough time to forget where you came from.
Master equation: Coupled first order differential equations for the flow of amplitude
between states written in terms of probabilities.
mn m n m n m
n n
dPk P k P
dt
n mk is rate constant for transition from state n to state m. Units: probability/time. Or in
matrix form: P P k where k is the transition rate matrix. With detailed balance,
conservation of population all initial conditions will converge on equilibrium.
States: Clustered regions of phase space that have high probability or long persistence.

13
Time‐Correlation Functions
Time-correlation functions are commonly used to characterize the dynamics of a random (or
stochastic) process. If we observe the behavior of an internal variable A describing the behavior
of one molecule at thermal equilibrium, it may be subject to microscopic fluctuations.
Although there may seem to be little information in this noisy trajectory, this dynamics is not
entirely random, since they are a consequence of time-dependent interactions with the
environment. We can provide a statistical description of the characteristic time scales and
amplitudes to these changes by comparing the value of A at time t with the value of A at a later
time t’. We define a time-correlation function as the product of these values averaged over an
equilibrium ensemble:
CAA
t t A t A t (2)
Correlation functions do not depend on the absolute point of observation (t and t’), but rather the
time interval between observations (for stationary random processes). So, we can define the time
interval t t , and express our function as AAC .
We can see that when we evaluate CAA at τ = 0, we obtain the mean square value of A, 2 .A At
long times, as thermal fluctuations act to randomize the system, the values of A become
uncorrelated: 2lim AAC A . It is therefore common to redefine the correlation function
in terms of the deviation from average
A A A (3)
20A A AAC t A t A C t A (4)
Then 0A AC gives the variance for the random process, and the correlation function decays to
zero as τ → ∞. The characteristic time scale for this relaxation is the correlation time, c . which
we can obtain from
2
0
10c dt A t A
A
(5)
The classical correlation function can be obtained from an equilibrium probability distribution as

14
, ; , ; ' ,AA eqC t t dp dq A p q t A p q t P p q (6)
In practice, correlation function are more commonly obtained from trajectories by calculating it
as a time average
CAA
( ) A A 0 Tlim
1
Td t
0
T
Ai t A
i t (7)
If the time-average value of C is to be equal to the equilibrium ensemble average value of C, we
say the system is ergodic.
Example: Velocity Autocorrelation Function for Gas
A dilute gas of molecules has a Maxwell–Boltzmann distribution of velocities, for which we will
focus on the velocity component along the x direction, xv . We know that the average velocity is
0xv . The velocity correlation function is
0x xv v x xC v v
The average translational energy is 212 / 2x Bm v k T , so
2(0) (0)x x
Bv v x
k TC v
m
For time scales that are short compared to the average collision time between molecules, the
velocity of any given molecule remains constant and unchanged, so the correlation function for
the velocity is also unchanged at kBT/m. This non-interacting regime corresponds to the behavior
of an ideal gas.
For any real gas, there will be collisions that randomize the direction and speed of the molecules,
so that any molecule over a long enough time will sample the various velocities within the
Maxwell–Boltzmann distribution. From the trajectory of x-velocities for a given molecule we
can calculate x xv vC
using time averaging. The correlation function will drop on with a
correlation time τc, which is related to mean time between collisions. After enough collisions, the
correlation with the initial velocity is lost and x xv vC approaches 2 0xv . Finally, we can
determine the diffusion constant for the gas, which relates the time and mean square
displacement of the molecules: 2 ( ) 2 xx t D t . From 0
( ) (0)x x xD dt v t v
we have
/x B cD k T m . In viscous fluids /c m is called the mobility.

15
Calculating a Correlation Function from a Trajectory
We can evaluate eq. (7) for a discrete and finite trajectory in which we are given a series of N
observations of the dynamical variable A at equally separated time points ti. The separation
between time points is ti+1 ‒ ti = δt, and the length of the trajectory is T=N δt. Then we have
, 1 , 1
1 1( ) ( )
N N
AA i j i ji j i j
C t A t A t A AT N
(8)
where ( )i iA A t . To make this more useful we want to express it as the time interval between
points tj it t j i , and average over all possible pairwise products of A separated by τ.
Defining a new count integer n j i , we can express the delay as tn . For a finite data set
there are a different number of observations to average over at each time interval (n). We have
the most pairwise products—N to be precise—when the time points are equal (ti = tj). We only
have one data pair for the maximum delay τ = T. Therefore, the number of pairwise products for
a given delay τ is N ‒ n. So we can write eq. (8) as
1
1 N n
AA i n ii
C C n A AN n
(9)
Note that this expression will only be calculated for positive values of n, for which tj ≥ ti.
As an example consider the following calculation for fluctuations in fluorescence intensity in an
FCS experiment. This trajectory consists of 32000 consecutive measurements separated by 44
μs, and is plotted as a deviation from the mean δA(t) = A(t) ‒ A .

16
The correlation function obtained from eq. (9) is
We can see that the decay of the correlation function is observed for sub-ms time delays. From
eq. (5) we find that the correlation time is τC = 890 μs.

Dynamics and Kinetics
Andrei Tokmakoff 6/3/2016
23. Barrier Crossing and Activated Processes 1 “Rare but important events”
The rates of chemical reaction are obtained by calculating the forward flux of reactant molecules
passing over the transition state, i.e. the time rate of change of concentration, population, or
probability for reactants passing over the transition state.
‡‡ /Rf dP dtJ (1)
Transition‐State Theory2
Transition state theory is an equilibrium formulation of
chemical reaction rates that originally comes from
classical gas-phase reaction kinetics. We’ll consider a
two-state system of reactant R and product P separated
by a barrier ≫kBT:
f
r
k
kR P
which we obtain by projecting the free energy of the
system onto a reaction coordinate ξ (a slow coordinate)
by integrating over all the other degrees of freedom. There is a time-scale separation between the
fluctuations in a state and the rare exchange events. All memory of a trajectory is lost on entering
a state following a transition.
1. D. Chandler, "Barrier Crossings: Classical Theory of Rare but Important Events" in Classical and Quantum
Dynamics in Condensed Phased Simulations, edited by B. J. Berne, G. Ciccotti and D. F. Coker (World Scientific, Singapore, 1998), pp. 3-23.
2. J. I. Steinfeld, Chemical Kinetics and Dynamics, 2nd ed. (Prentice Hall, Upper Saddle River, N.J., 1998).

2
Our goal is to describe the rates of crossing the transition state for the forward and reverse
reactions. At thermal equilibrium, the rate constants for the forward and reverse reaction, fk and
rk , are related to the equilibrium constant and the activation barriers as
,
,
[ ]exp
[ ]
f rP eq f a a
eqR eq r B
P k E EPK
R P k k T
Eaf , Ea
r are the activation free energies for the forward and reverse reactions, which are related to
the reaction free energy through 0f ra xa r nE GE . Pi refers to the population or probability of
occupying the reactant or product state.
The primary assumptions of TST is that the transition state is well represented by an activated
complex RP‡ that acts as an intermediate for the reaction from R to P, that all species are in
thermal equilibrium, and that the flux across the barrier is proportional to the population of the
activated complex.
‡R RP P
Then, the steady state population of the activated complex can be determined by an equilibrium
constant that we can express in terms of the molecular partition functions.
Let’s focus on the rate of the forward reaction considering only the equilibrium
‡R RP
We relate the population of reactants within the reactant well to the population of the activated
complex through an equilibrium constant
‡‡ [ ]
[ ]eq
RPK
R
which we will evaluate using partition functions for the reactant and activated complex
‡‡ f
a BE k Teq
R
q VK e
q V
Then we write the forward flux in eq. (1) proportional to the population of activated complex
‡‡
‡
[ ]
[ ]
f
eq
RPJ
K R
Here ν is the reaction frequency, which is the inverse of the transition state lifetime τmol. ν-1 or
τmol reflects the time it takes to cross the transition state region.

3
To evaluate ν, we will treat motion along the reaction coordinate ξ at the
barrier as a translational degree of freedom. When the reactants gain enough
energy ( )faE , they will move with a constant forward velocity vf through a
transition state region that has a width . (The exact definition of will not
matter too much).
molℓ
vf
Then we can write the average flux of population across the transition state in the forward
direction
‡‡
‡
[ ]
1[ ]
2
fa B
feqf
E k T B
R
vK RJ
q k Te R
q m
(2)
where vf is obtained from a one-dimensional Maxwell–Boltzmann distribution.
For a multidimensional problem, we want to factor out the slow coordinate, i.e., reaction
coordinate () from partition function.
‡ ‡q q q ‡q contains all degrees of freedom except the reaction coordinate. Next, we calculate q by
treating it as translational motion:
q (trans) = d
0
ℓ
eEtrans /kBT = 2mk
BT
h2ℓ (3)
Substituting (3) into (2): ‡
‡ [ ]f
a BE k TBf
R
k T qe RJ
h q
We recognize that the factor ν = kBT/h is a frequency whose inverse gives an absolute lower
bound on the crossing time of ~10-13 seconds. If we use the speed of sound in condensed matter
this time is what is needed to propagate 1–5 Å. Then we can write
‡ [ ]ff k RJ
where the forward rate constant is
kf AeEa
f kBT (4)
and the pre-exponential factor is

4
‡
R
qA
q
A determines the time that it takes to cross the transition state in the absence of barriers (Ea → 0).
kf is also referred to as kTST.
To make a thermodynamic connection, we can express eq. (4) in the Eyring form ‡
‡ /f BBE k TS k
fk e e
where the transition state entropy is
S‡ k lnq ‡
qR
S‡represents a count (actually ratio) of the reduction of accessible microstates in making the
transition from the reactant well to the transition state. For biophysical phenomena, the entropic
factors are important, if not dominant!
Also note implicit in TST is a dynamical picture in which every trajectory that arrives with
forward velocity at the TST results in a crossing. It therefore gives an upper bound on the true
rate, which may include failed attempts to cross. This is often accounted for by adding a
transmission coefficient κ < 1 to kTST: kf=κkTST. Kramers' theory provides a physical basis for
understanding κ.

5
Kramers’ Theory
In our treatment the motion of the reactant over the transition
state was treated as a free transitional degree of freedom. This
ballistic or inertial motion is not representative of dynamics in
soft matter at room temperature. Kramers’ theory is the
leading approach to describe diffusive barrier crossing. It
accounts for friction and thermal agitation that reduce the
fraction of successful barrier crossings. Again, the rates are obtained from the flux over barrier
along reaction coordinate, eq. (1).
One approach is to treat diffusive crossing over the barrier in a potential using the Smoluchowski
equation. The diffusive flux under influence of potential has two contributions:
1) Concentration gradient /dC d . Proportional to diffusion coefficient, D.
2) Force from gradient of potential.
( ) ( ) ( )( )
dC C dUJ D
d d
As discussed earlier ζ is the friction coefficient and in one dimension:
Bk T
D
Written in terms of a probability density P
B
P dU dPJ D
k T d d
or B B
U k T U k Td
J De Ped
JeU /kBT Dd
dPeU /kBT (5)
Here we have assumed that D and ζ are not functions of ξ.
The next important assumption of Kramers’ theory is that we can solve for the diffusive flux
using the steady-state approximation. This allows us to set: J = constant.
Integrate along ξ over barrier.

6
/ /
( )/
B B
B R B P B
b bU k T U k T
a a
b U k T U k T U k TR Pa
J e d D dPe
J e d D P e P e
Pi are the probabilities of occupying the R or P state, and Ui are
the energies of the R and P states. The right hand side of this
equation describes net flux across barrier.
Let’s consider only flux from R P: R PJ , which we do by
setting PP 0. This is just a barrier escape problem. Also as a
reference point, we set UR(ξR) = 0.
( )/ B
RR P b U k T
a
D PJ
e d
(6)
The flux is linearly proportional to the diffusion coefficient and the probability of being in the
reactant state. The flux is reduced by a factor that describes the energetic barrier to be overcome.
Now let’s evaluate with a specific form of the potential. The simplest form is to model U() with
parabolas. The reactant well is given by
221
2R R RU m (7)
and we set R → 0. The barrier is modeled by an
inverted parabola centered at the transition state with a
barrier height for the forward reaction Ef and a width
given by the barrier frequency ωbar:
Ubar E f
1
2mbar
2 ‡ 2
In essence this is treating the evolution of the probability
distribution as the motion of a fictitious particle with
mass m.
First we evaluate the denominator in eq. (6). /bar BU k Te is a probability density that is peaked at ‡ ,
so changing the limits on the integral does not affect things much.
22 ‡/
2
2exp
2bar B
b BU k T B
aB B
m k Te d d
k T m
Then eq. (6) becomes

7
JRP bar Dm
2kBTeE f kBT
PR (8)
Next, let’s evaluate PR. For a the Gaussian well in eq. (7), the probability density along ξ is /R BU k T
RP e :
2212exp /
2
R R BR
R R RB
P m k T
mP P d
k T
Substituting this into eq. (8) we have
2f BE k T
R P R barB
mJ D e
k T
Using the Einstein relation /BD k T , we find that the forward flux scales inversely with
friction (or viscosity).
2
f BE k TbarRR PJ e
(9)
Also, the factor of m disappears when the problem is expressed in mass-weighted coordinates
. Note the similarity of eq. (9) to transition state theory. If we associate the period
of the particle in the reactant well with the barrier crossing frequency,
2R Bk T
h
then we can also find that we an expression for the transmission coefficient in this model:
diff diff TSTk k
1bardiff
This is the reaction rate in the strong damping, or diffusive, limit.
Hendrik Kramers actually solved a more general problem based on the Fokker–Planck Equation
that described intermediate to strong damping. The reaction rate was described as

8
This shows a crossover in behavior between the strong damping (or diffusive) behavior
described above and an intermediate damping regime:
Strong damping/friction: barKr
Intermediate damping: 2 B 1Kr and Kr TSTk k
In the weak friction limit, Kramers argued that the reaction rate scaled as
kweak
~ kTST
That is, if you had no friction at all, the particle would just move back and forth between the
reactant and product state without committing to a particular well. You need some dissipation to
relax irreversibly into the product well. On the basis of this we expect an optimal friction that
maximizes κ, which balances the need for some dissipation but without so much that barrier
crossing is exceedingly rare. This “Kramers turnover” is captured by the interpolation formula
1 Kr1
weak1