-
8/3/2019 Back Stepping Method CSTR
1/6
ABSTRACT
The backstepping method was applied to a tank system
to control the flow and temperature at the exit. A
backstepping control law and a robust backstepping
control law were developed for the plant without andwith
uncertainties, respectively. The designed control
system is asymptotically stable for the plant without
uncertainties and globally uniformly bounded for the
plant with uncertainties.
1. INTRODUCTION
Over the past few years, a considerable number of studies
have been devoted to a new control design methodology:
backstepping ([1]). Unlike feedback linearization,
backstepping can avoid the cancellation of useful
nonlinearities. So, it offers the prospect of a more
practicable nonlinear control law.
This paper describes the application of the backstepping
control strategy to a tank system to control the flow and
temperature at the exit. Mathematical models of the
system are first derived. Then, a backstepping controller
is designed for the nominal plant. However, there are
usually some uncertainties in the mathematical model
of the plant. To achieve robustness for the control system,
a robust backstepping controller is designed by improving
the backstepping control law to guarantee global uniform
boundedness.
Nomenclature
qi Rate of inflow of the water ( / )m s3
qo Rate of outflow of the water ( / )m s3
i Temperature of the inflow (K)
o Temperature of the outflow (K)
a Air temperature (K)
h Height of the water level (m)
Flow and Temperature Control of a Tank System
by Backstepping Method
JinHua SheTokyo Engineering University, Hachioji, Tokyo, Japan,
[email protected]
Hiroshi OdajimaAdvanced Film Technology Inc., Musashino, Tokyo,
Japan, [email protected]
Hiroshi HashimotoTokyo Engineering University, Hachioji, Tokyo,
Japan, [email protected]
Minoru HigashiguchiTokyo Engineering University, Hachioji,
Tokyo, Japan, [email protected]
A Cross-sectional area of the tank ( )m2
i Heater supplied (W)
R Equivalent heat resistance of the tank (K/W)
a Discharge coefficient of valve ( / ).m s2 5
Density of water ( / )kg m3
cp Specific heat of water ( / / ) J kg K
2. MATHEMATICAL MODEL OF THE TANK
SYSTEM
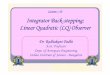
The tank system studied here is shown in Fig. 1. In this
system, cold water is sent to the tank from a waterworks.
The water is heated in the tank, and then sent out. The
system has two control inputs: the rate of inflow and the
heater supply. The rate and temperature of the inflow,
the rate of the outflow, and the temperature of the water
in the tank are known.
The rate of outflow is given by
dh
dt
q q
A
i o=
, (1)
q a ho = , (2)
and
q qo m > 0 . (3)
Let T be the heat that the water in the tank possesses,
o be the heat that the output water takes away, S be
the heat released to the air and c be the heat that the
inflow brings in, and assume that the temperature of the
water in the tank is uniform. Then we have
T o s c i= + + . (4)
-
8/3/2019 Back Stepping Method CSTR
2/6
FIGURE 1: The tank system.
and
Tp
oo
A c
aq
d
dt=
2
2 , (5)
o p o oc q= , (6)
so a o a
oR h A R q=
=
[ , ] [ ], (7)
c p i ic q= . (8)
From the above relationships, the model of the tank can
be written as
dq
dt
a
A
a
A qq
d
dtB
c
q q R
B
q R
Bc
qq
B
q
o
oi
o p
o oo
a
o
p i
oi
oi
= +
= + +
+ +
2 2
2 2
2 2
2 2
1
1
( )
,
(9)
where
B a Acp=2 /( ) .
It is clear from (9) that the tank system is a two-input
two-output nonlinear system. If we let qo and o be
the desired outputs, then the control objective is to make
the outflow and temperature track them. In the design
of such control systems, the flow sub-system and the
temperature sub-system are usually considered
separately, and the correlation between the controlled
outputs is ignored. Linear control theory is mainly used
for control system design. In particular, PID controllers
are generally designed for each linearized sub-system
([2]).
In this study, we used the MIMO nonlinear model directly
so as to take the nonlinearties of the plant and the
correlation between the controlled outputs into account.
Decomposing the outputs yields
qi , qi
qo , qoh
Fi
q q qo o oe
o o oe
= +
= +
,
(10)
where qoe and oe are the errors between the real and
the desired outputs. If we substitute (10) into (9) and
transform the control inputs into
q q q u
q q cR R
q q c u
i o oe q
i o oe p oa
o oe p i
= + +
= + +
+ +
( )( )
{( ) }
( ) ,
1
1
(11)
then the plant model becomes
dq
dt
a
Au
d
dt
Bc
q q
B
q q R
Bc
q q u
B
q q u
oeq
oe p oe
o oe
oe
o oe
p i
o oeq
o oe
=
= +
+
++
++
2
2
2
2
( )
( ) .
(12)
If we let
x qoe oeT
:= [ ] , (13)
and rewrite the model in the form:
dx dt f x g x u g x uq/ ( ) ( ) ( )= + +1 2 , (14)
then
f x Bc
q q
B
q q R
g x
a
ABc
q q
g x B
q q
p oe
o oe
oe
o oe
p i
o oe
o oe
( )
( )
( ) ( )( )
.
= +
+
=
+
=+
0
20
2
1
2
22
(15)
(14) is the nominal model of the plant. Since it is hard
to obtain an exact model of a real plant, it is useful to
include uncertainties in the plant model as follows:
dx dt f x g x u g x u
a
A q q
B
q q
q
o oe o oe
T
/ ( ) ( ) ( )
( ),
= + + +
=+ +
1 2
2
1 2 22
1
(16)
with
-
8/3/2019 Back Stepping Method CSTR
3/6
1 1 2 2 , . (17)
3. DESIGN OF BACKSTEPPING CONTROL
LAWS
We first consider a plant without uncertainties. If a
Lyapunov function is defined as
V x x x qT
oe oe( ) := = +1
2
1
2
1
2
2 2 , (18)
it is clear that the following control law
u
u
x
xg x g x
k q
k
kA
aq
Bq q k q k q q
q q q oe
oe
q oe
o oe q i oe o oe oe
=
= [ ]
=
+ + +
:
( )
( )( ) ( )
( )[ ( ) ]
1 2
1
2
2
12
(19)
makes
dV
dt
V
x f g gq= + +
( )1 2 negative definite if
k kq , > 0 (20)
are chosen.
Now, backstepping the plant (14) gives
dx dt f x g x v g x v
d
dt
v
v
u
u
q
q q
/ ( ) ( ) ( )
.
= + +
=
1 2
(21)
A new Lyapunov function is selected:
V V x z za q: ( )= + +1
2
1
2
2 2, (22)
where
z v x
z v x
q q q: ( )
: ( )
=
=
. (23)
Then we have the following lemma.
Lemma 1: The control law
u k kA
a
a
Aq k k v
Bc
q q
q q oe q q
p i
o oeoe
= + +
+
( ) ( )
,
1 2
2
1
2
2
(24-1)
u k vB
q q k q
k q q c k q q
k q q v k c q q
kR
c q q v v
B
o oe q i oe
o oe oe p q i o oe
o oe oe q p oe o oe
oe p i o oe q
oe
= + +
+ + +
+ + + +
+ +
2
12
2
{ ( )[
( ) ]} { ( )
( ) } ( )
{ ( ) }
(( )q qo oe+ 2
(24-2)
guarantees the global asymptotic stability of the system
(21) at ( , ) ( , )q qo o o o = for any k k1 2 0, >
.Proof:
dV dt dV dt v u d dt
v u d dt
V
xf g g g z g z
z u
x
f g v g v
z ux
f g v g
a q q q q
q q
q q
q
q
q
/ / ( )( / )
( )( / )
( )
[ ( )]
[ (
= +
+
= + + + +
+ + +
+ + +
1 2 1 2
1 2
1 2vv)].
So, if the control law is chosen to be
u k vx
f g v g vV
xg
k v kA
aq k v
a
Aq
Bc
q q
k kA
a
a
A
q k k vBc
q
q q qq
q
q q oe q q oep i
o oeoe
q oe q qp i
= + + +
= + +
= + +
1 1 2 1
1 2
2
1 2
2
1
2
2
2
2
( ) ( )
( )
( ) ( )
oo oe
oe
q+
,
u k vx
f g v g vV
xg
k vB
q q k q k q q
c k q q k q q v
k c
q
o oe q i oe o oe oe
p q i o oe o oe oe q
p oe
= + + +
= + + + +
+ + +
+
2 1 2 2
2
12
2
( ) ( )
{ ( )[ ( ) ]}
{ ( ) ( ) }
(
qq q
kR
c q q v vB
q q
o oe
oe p i o oe q
oe
o oe
+
+ + +
)
{ ( ) }( )
,
2
then
dV
dt
V
xf g g k z k za q q= + + 1 1
02 4
, ,
k k1 2 0, > and k k 1 2 0, > .Proof: Defining
x x xR: ( )=
1 2
sgn( ) : sgn( ) sgn( ) y y y= [ ]1 2 for y y y= [ ]1 2 and
=+ +
a
A q q
B
q qo oe o oe
T2
1 2 22
1
( )
yields
dV dt dV dt v u d dt
v u d dt
V
xf g g g z g z
V
x
z ux
f g v g v zx
a q q q q
q q
q qq
q qq
/ / ( )( / )
( )( / )
( )
{ ( )}
= + +
= + + + + +
+ + +
1 2 1 2
1 2
+ + + z ux
f g v g v zx
q
{ ( )} .
1 2
Using Young's Inequality
+2 21
4,
where ( , ) R2 and l is any positive number, yields
V
x
a
A
q
q qB
q q
q
q q
a
A q q
B
q
q q
a
A
B
oe
o oe
oe
o oe
oe
o oe
oe
o oe
oe
m
oe
m
=+
++
+
+ ++
+
+ + +
2
1 2 2
2
2
4
2 12
2
4
2
22
2
2
2
4
4
2 12
2
22
2
16 4
16 4
( )
( ) ( )
.
So, if the control law is chosen to be
u k vx
f g v g vV
xg
k vx
k kA
a
a
Aq k k v
Bc
q qk k z
q q
q q qq
q
q qq
q oe q q
p i
o oeoe q q
o oe
= + + +
= + +
+
+
1 1 2 1
1
1 2
2
1
11
2
2
( ) ( )
sgn[ ]
( ) ( )
sgn[ ] ,
u k v
x
f g v g v
V
xg k v
x
k vB
q q k q
k q q c k q q
k q
q
o oe q i oe
o oe oe p q i o oe
o
= + + +
= + +
+ + +
+ +
2 1 2
2 2
2
12
2
( ) ( )
sgn[ ]
{ ( )[
( ) ]} [ ( )
(
qq v k c q q
Rc q q v v
B
q qk z
c k q q
q q
k q q
q qk
oe oe q p oe o oe
oe p i o oe q
oe
o oe
p q i o oe
o oe
o oe oe
o oe
) ] { ( )
( ) }
( )sgn[ ](
(
( ) )),
+ +
+ +
+
+
+
++
++
2 2
1 2
2
then
dV
dt
V
xf g g k z k za q q= + +
( )1 2 1
22
2
-
8/3/2019 Back Stepping Method CSTR
5/6
+ +
+
+
V
xk z
xz
zx
k
k zx
z
zx
k
kq
q k z k q
k z
a
A
qq
q
qq
qm
oe qm
oe
11
22
2
2
1
2
4
2
2
2
4
2
1 1
16
sgn[ ] (
sgn[ ]
)
sgn[ ] (
sgn[ ]
)
( ) ( )
112
2
22
4+
B .
That implies that dV dt a / is negative when
X
a
A
B
>
+4
2 12
2
22
16 4
, where X q z zoe oe q
T:= [ ]
and : min( , , , )= kq
kq
k kqm m
1 12 4 1 2
, i.e. the
stateXis globally uniformly bounded. (QED)
4. NUMERICAL EXAMPLE
Let the parameters of the tank system be
A m
a m s
R K W
K
K
a
i
=
=
=
=
=
0 2826
8 688 10
1000
288 15
289 15
2
3 2 5
. ( )
. ( / )
( / )
. ( )
. ( )
.
(27)
and
q m s
K
o
o
( ) . ( / )
( ) . ( )
0 0 0013
0 279 15
3=
=
(28)
The desired outputs are
q m s
K
o
o
=
=
0 001
282 15
3. ( / )
. ( )
(29)
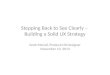
The simulation results are shown in Figs. 2 and 3.
In Fig. 2, the nominal plant is controlled by the control
law (24). The parameters of the controller are
k k
k k
q = =
= =
0 00473
0 75 101 26
.
.(30)
It can be seen that the designed control system is stable
and the outputs reach the desired values after 1000
minutes.
FIGURE 2: Simulation results for the nominal plant.
In Fig. 3, the plant is assumed to contain uncertainties,and 1
and 2 are white noise with the bounds
15
24
5 0 10
1 0 10
=
=
. sin( )
. sin( )
t
t(31)
The parameters of the controller (25) are chosen to be
(30) and
-
8/3/2019 Back Stepping Method CSTR
6/6
FIGURE 3: Simulation results for a plant
with uncertainties.k k 1 2 1 0= = . (32)
The simulation results show that the designed control
system is globally uniformly bounded and the outputs
converge to the desired values after 1000 minutes.
5. CONCLUSIONS
In this paper, a mathematical model of a tank system is
first derived, and a backstepping control law is developed
for the nominal plant. Then, based on the control law, a
robust backstepping control law is developed for a plant
with uncertainties. The validity of these control laws is
demonstrated by simulations.
REFERENCES
1. M. Krstic, I. Kanellakopoulos and P. Kokotovic:
Nonlinear and Adaptive Control Design, John Wiley
& Sons, Inc., 1995
2. N. Suda, PID Control, Asakura Shoten, 1992