Embed Size (px)
DESCRIPTION
behaviorism, molar behaviorism, behavior analysis
Citation preview

B
TQ1
WQ2
aQ3b
a
AA
KCIMRVV
rtp(oipg
r
w1
m
T
h0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
ARTICLE IN PRESSG ModelEPROC 2990 1–8
Behavioural Processes xxx (2015) xxx–xxx
Contents lists available at ScienceDirect
Behavioural Processes
jo ur nal homep ag e: www.elsev ier .com/ locate /behavproc
he role of induction in operant schedule performance
illiam M. Baum a,b,∗
University of California, Davis, USAUniversity of New Hampshire, USA
r t i c l e i n f o
rticle history:vailable online xxx
eywords:ompetition
nductionatching law
einforcementariable-interval schedule
a b s t r a c t
Baum and Davison (2014b) showed that Baum’s (2012) recasting of reinforcement as induction may bequantified by assuming that induction follows a power function of reinforcer rate. This power-functioninduction is readily integrated with theory based on the matching law. Herrnstein (1970) originallyassumed background activities (BO) and their associated reinforcers ro to be constant, but ro shouldvary with BO. Further, power-function induction implies that BO should vary with reinforcer rate. Baum(1993) reported performance on a wide range of variable-ratio (VR) and variable-interval (VI) schedules.Pigeon’s VR peck rate followed an inverted U-shaped relation, but VI peck rate separated into threeranges of food rate: low-to-moderate, moderate-to-high, and extremely high. As food rate increases, the
ariable-ratio schedule concave downward relation in the low range reaches an inflection point and gives way to a concaveupward relation in the higher range. At the extremes of food rate, VI peck rate decreases. A model basedon competition between induced pecking and BO accounted for VI peck rate in the moderate to extremerange of food rates. Further research will account for all three ranges, either by integrating power-functioninduction with matching theory or with a model based on competition between induced activities.
© 2015 Published by Elsevier B.V.
36
37
38
39
40
41
42
43
44
45
46
A previous paper (Baum, 2012) recasts the various processes ofeinforcement and punishment, stimulus control, classical condi-ioning, adjunctive behavior, and instinctive behavior as just onerocess, induction, as defined by Segal (1972). A subsequent paperBaum and Davison, 2014b) began developing a quantitative modelf induction that accounts for operant performance on variable-
nterval (VI) schedules and concurrent VI VI schedules. The presentaper takes a further step toward quantifying induction and inte-rating it with the matching law (Herrnstein, 1961).
Herrnstein (1961) originally presented the matching law as aelation between two behavioral alternatives in the form:
B1
B1 + B2= r1r1 + r2
(1)
here, B1 and B2 are response rates or times spent at Alternatives and 2, and r1 and r2 are reinforcer rates at Alternatives 1 and 2.
Herrnstein (1970) subsequently proposed generalizing the
Please cite this article in press as: Baum, W.M., The role of induchttp://dx.doi.org/10.1016/j.beproc.2015.01.006
atching law to any number of alternatives n in the form:
Bi
˙B= ri˙r
(2)
∗ Correspondence address: 611 Mason #504, San Francisco, CA 94108, USA.el.: +1 415 345 0050.
E-mail address: [email protected]
ttp://dx.doi.org/10.1016/j.beproc.2015.01.006376-6357/© 2015 Published by Elsevier B.V.
47
48
49
50
51
where, Bi represents response rate or time spent at any one of nalternatives, B represents the total of responding or time spentat the n alternatives, ri represents reinforcer rate at any of the nalternatives, and r represents the total or the n reinforcer rates.
Using Eq. (2), Herrnstein (1970) derived an equation forresponding at just one recorded alternative:
B = Kr
r + rO(3)
where, K replaces �B on the assumption that other, unmeasured,activities occur and that, with BO representing those other activi-ties, and �r = r + ro, with ro representing reinforcers due to BO.
Herrnstein (1970) fitted Eq. (3) to several data sets from Cataniaand Reynolds (1968). Subsequently de Villiers (1977) fitted it toadditional data sets, and it has generally proven successful indescribing performance across variable-interval (VI) schedules.
One feature of the fits to Eq. (3) seems incorrect, however: ro isassumed to be constant as r varies. Baum (1981) and Davison (1993,
tion in operant schedule performance. Behav. Process. (2015),
2004) pointed out that this assumed constancy is inconsistent withour general understanding of reinforcement contingencies, becauseBO must vary as B varies, and ro should vary with BO. By definition,a contingency creates a dependence of reinforcer rate on response
52
53
54
55

ING ModelB
2 l Proce
rt
r
wf
r
af
r
f(r
r
pc
cBtr
tioi
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
ARTICLEEPROC 2990 1–8
W.M. Baum / Behavioura
ate; such a dependence is called a feedback function. For example,he feedback function for a variable-ratio (VR) schedule is given by:
= B
V(4)
here, V is the average number of responses required per rein-orcer, and the feedback function for a VI schedule is approximately:
= 1t + a
B
(5)
where, t is the average interval and a is a constant that represents tendency to bursts at low reinforcer rates (Baum, 1992). Thus, aeedback function should exist between ro and BO:
o = f (BO) (6)
At least two questions arise: (1) what is BO? and (2) what is theeedback function f relating ro to BO? Baum (1981) and Davison1993) suggested that the function should have characteristics of aatio schedule (Eq. (4))—that is,
O = BO
V(7)
The basis for this conjecture was that BO activities ought toroduce ro directly, with no time-limiting factor such as wouldharacterize an interval schedule (Eq. (5)).
Davison (2004) found evidence that BO is not one activity but aonglomerate, but Baum and Davison (2014b) found that treatingO as one activity allowed calculating variation in ro and discoveringhat Eq. (7) is the feedback function relating ro to BO, at least at higheinforcer (food) rates.
An earlier paper (Baum, 2012), relying on the process of induc-
Please cite this article in press as: Baum, W.M., The role of induchttp://dx.doi.org/10.1016/j.beproc.2015.01.006
ion outlined by Segal (1972), suggested that phylogeneticallymportant events induce activities denoted adjunctive or interimr terminal (Staddon, 1977). Following this reasoning, BO would be
nduced by a reinforcer such as food, and BO would depend on the
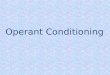
Fig. 1. Pecks per minute versus food per minute from Baum (1993). Data are from a mu
PRESSsses xxx (2015) xxx–xxx
food rate r. Baum and Davison (2014b) found that BO varied with rand, through this variation and Eq. (7), that ro varied with r. Thus,at least part of the other activities represented in Eq. (6) as BO andimplicit in Herrnstein’s hyperbola (Eq. (3)) is induced by the food(r). To be accurate, Baum and Davison (2014b) proposed that Eq. (3)should be modified to include activities unrelated to the food rater—what Staddon (1977) called “facultative” activities. They repre-sented these activities as BN and the reinforcers associated with BNas rN:
B = Kr
r + rO + rN(8)
with the understanding that K equals B + BO + BN and that somefunction g relates BO to r:
BO = g(r) (9)
Eq. (9) results in ro depending on r indirectly:
rO = g(r)V
(10)
To fit data from two large data sets (Baum and Davison, 2014a;Soto, McDowell, & Dallery, 2005), Baum and Davison (2014b)assumed that induction follows a power function:
BO = corso (11)
where, the exponent so may be thought of as the sensitivity of BOto r, and the coefficient co accounts for reconciling of units.
Baum (1993)A data set that allows testing these proposals further for both
VI and VR schedules was gathered in an experiment reported in
tion in operant schedule performance. Behav. Process. (2015),
1993. The procedure was a two-component multiple schedule inwhich a VR component alternated with a VI component separatedby substantial time-outs in between. The intervals generated in theVR component were played back in the VI component to roughly
ltiple VR VI schedule in which the VI component was yoked to the VR component.
108
109
110
111

ING ModelB
l Proce
evscftSlu
pamUtptwpBarln0eputap
iu
Q4
Fo
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
ARTICLEEPROC 2990 1–8
W.M. Baum / Behavioura
quate the intervals and food rates in the two. The VR schedulearied across conditions, and each condition continued in daily ses-ions until both performances appeared stable, whereupon a newondition began. The VR was varied over as large a range as possible,rom a large VR that produced a moderate food rate just sufficiento maintain responding to FR 1, the endpoint of ratio schedules.ince ratio schedules exhibit “ratio strain” when they are relativelyarge, no low food rates were possible, but food rate could increasep to the extreme at the high end with FR 1.
Fig. 1 shows peck rate as a function of food rate for the fourigeons in the experiment. Most conditions were presented twice,nd Fig. 1 shows the average peck rate across presentations. Perfor-ance on the VR schedules was simply a bitonic or upside-down-shape, and peck rates were generally higher for the VR than
he yoked VI. Performance on the VI schedules was more com-lex. Most notably, whereas the VR curve was concave downwards,he VI curve was concave upwards in the mid-range of food rates,hich differed from pigeon to pigeon. Indeed, at least three of the
igeon’s curves show a clear inflection point: at about 11 fpm for258; at about 5 fpm for B261 and B122; although less pronounced,t about 6 fpm for B348. These inflection points suggest that peckate was relatively flat in the low range, but because food ratesower than about 0.4 per minute, equivalent to a VI 150s, couldot be maintained—except for B261, which maintained pecking at.13 fpm, equivalent to a VI 460s. Previous research supports thexistence of an inflection point, because a negatively acceleratedattern of responding in the lower range of food rates is well doc-mented (e.g., Catania & Reynolds, 1968; de Villiers, 1977), andhe shift from negative acceleration in the lower range to positivecceleration in the higher range requires an inflection point. All four
Please cite this article in press as: Baum, W.M., The role of induchttp://dx.doi.org/10.1016/j.beproc.2015.01.006
igeon’s peck rates decreased at the highest food rates.Since the VI performances included a relatively flat peck rate
n the low range of food rates, an inflection point followed by anp-turn in peck rate, and a down-turn at the highest food rates, the
ig. 2. Pecks per minute versus food per minute in the VI component of Baum (1993). Thf food rates. The inflection point between low food rates and high food rates may be see
PRESSsses xxx (2015) xxx–xxx 3
VI curves might be composed of three regions: low to moderatefood rates, moderate to high food rates, and high to extreme foodrates. Fig. 2 illustrates this possibility. In the lower, flatter range, thebroken line in each graph represents the hyperbola in Eq. (3) fittedto the peck rates. Viewed this way, one sees clearly the up-turn inthe mid-range of food rates and the down-turn at the extreme offood rate. Any model of these peck rates should account for boththe up-turn and the down-turn.
1. An induction model
I modeled these data as follows. Paralleling the reasoning of
Baum and Davison (2014b), I made the following assumptions:BO varies with r, because BO is induced by food according to Eq.
(11), as assumed by Baum and Davison (2014b) with some empir-ical support (Staddon, 1977);
Pecking also is induced by food, according to:
B = crs (12)
When B and BO compete, BO replaces B:If crs + corso > K , then B = K − BO; that is, the activities exist in
a hierarchy, such that B and BO replace BN, and BO replaces B(BN <B < BO). Although Baum and Davison (2014b) assumed B toreplace BO in a similar model, the present data require that BOreplace B, as was true of rat’s lever pressing (Soto et al., 2005).Replacement of B by BO corresponds to what Breland and Breland(1961) called “instinctive drift.” Whether it should be consideredmaladaptive, as “misbehavior” suggests, depends on the functionof BO activities in the natural environment. For example, feedingcompetes with vigilance when any predation risk exists (see Lima
tion in operant schedule performance. Behav. Process. (2015),
and Dill, 1990 for a review).A theoretical benefit of assuming that induction follows a power
function is that the generalized matching law (Baum, 1974, 1979;Davison and McCarthy, 1988) is preserved:
e broken line represents the fit of Herrnstein’s hyperbola (Eq. (3)) to the low rangen at the intersection of the broken curve with the solid line.
173
174
175
176

ARTICLE IN PRESSG ModelBEPROC 2990 1–8
4 W.M. Baum / Behavioural Processes xxx (2015) xxx–xxx
F 93) fi(
h
EtFapsaba
asswa
erVel(tfifuotV
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
ig. 3. Pecks per minute versus food per minute in the VI component of Baum (1912)).
BiBj
= cirsi
cjrsj
, for all i /= j of n operant activities. The power function
as some empirical support too (Staddon, 1977).The model was fitted to the peck rates using Solver in Microsoft
xcel, varying c, s, co, and so, after setting K to a rate slightly abovehe maximum peck rate and placing a minimum of 0.00001 on co.ig. 3 shows the results of fitting to the VI peck rates. The peck ratesre fitted well, with one flaw—for all four pigeons, the inflectionoint demarcated in Fig. 2 falls below the curve. Because the dataet includes no extremely low food rates, the model takes no specialccount of peck rates in that range. Replacing the hyperbola (Eq. (3);roken lines in Fig. 2) would require food rates in the lower rangend additional assumptions about B, BO, and BN in that range.
Fig. 4 shows the results of fitting the same model, with the samessumptions, to the VR peck rates. These fits are close and show noystematic deviation from the data. As might be expected from theimple bitonic shape, these peck rates were relatively easy to fitith Excel Solver, varying c, s, co, so, and K. They raise no problem
bout low food or peck rates.An immediate question to ask is whether the model’s param-
ters that best fitted the peck rates remained the same for the VIates and the VR rates. Fig. 5 makes the comparison. It shows eachI parameter plotted against the corresponding VR parameter forach pigeon. The estimates of K (diamonds) were about the same,ying on the major diagonal (equality). The estimates of c and ssquares and triangles) also were about the same, indicating thathe power function for the inducing of pecking was about the sameor VI and VR. Notable differences occurred for co and so, however,ndicating that the power function for the inducing of BO differedor the VI and VR. In fitting the model, the estimates of co, in partic-
Please cite this article in press as: Baum, W.M., The role of induchttp://dx.doi.org/10.1016/j.beproc.2015.01.006
lar, tended to be extremely small, and necessitated the lower limitf 0.00001 for co. All four estimates of co were far lower for the VIhan the VR. In contrast, all four estimates of so were higher for theI than for the VR. The reason why induction of BO would differ for
tted with the induction model assuming power-function induction (Eqs. (11) and
VI and VR schedules remains to be discovered, but probably stemsfrom the more abrupt down-turn in the VI peck rates at the higherfood rates. The combination of a small coefficient co with a largeexponent so caused BO to be tiny at lower food rates but to rampup quickly at higher food rates, thus allowing the model to fit thatsharp downturn in VI peck rates. The large coefficient c paired withan exponent s less than 1.0 modelled a more gradual increase inpeck rate, starting at moderately high levels at moderate food ratesto begin with.
To try to model these peck rates with optimality or matchingtheory, one needs to make additional assumptions. Although thepresent model requires no assumption about ro, optimality andmatching require a feedback function for ro, possibly Eq. (7), whichhas some empirical support (Baum and Davison, 2014b). One mustalso assume a feedback function for rN, which would probably differfrom direct proportionality, because BN represents the activities ofthe organism when it has nothing better to do—that is, backgroundactivity as originally conceived (Herrnstein, 1970). A possibilitysuggested by Baum and Davison (2014b) is:
rN = 11VN
+ ABN
(13)
which resembles a VI feedback function with A accounting forbursts in BN and VN the asymptote as BN becomes large.
With these assumed feedback functions, the VR peck rates werereadily fitted by both optimality (maximizing r + ro + rN) and match-ing (Eq. (8)). Neither optimality nor matching was able to capturethe up-turn in VI peck rates in the mid-range of food rates. Fig. 6compares the results of applying Eq. (8) (matching) with the results
tion in operant schedule performance. Behav. Process. (2015),
of applying the present model to the peck rates averaged acrosspigeons (means; medians were almost identical to the means).Because of the large number of parameters, the curves were fit-ted by eye, holding most parameters constant and using Microsoft
237
238
239
240

ARTICLE IN PRESSG ModelBEPROC 2990 1–8
W.M. Baum / Behavioural Processes xxx (2015) xxx–xxx 5
F 993) fi(
EsrmFc(iitaseEb
2
mabptpftp
smbf
and-forth movement of the pigeon’s head. Thus, the up-turn inpeck rates might represent a mix of two topographies—say, multi-operation (flicking or swiping) and single-operation (pecking), with
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
ig. 4. Pecks per minute versus food per minute in the VR component of Baum (112)).
xcel’s Solver to adjust one or two at a time. The top right graphhows the fit of the induction model to the VR peck rates; itesembles those in Fig. 4. The top left graph shows the induction
odel fitted to the mean VI peck rates. The fit resembles those inig. 3 in that it is close but leaves the inflection point below theurve. The lower right graph shows the results of applying Eq. (8)matching) to the VR peck rates. The fit is just as good as to thenduction model. The lower left graph shows the results of apply-ng Eq. (8) to the VI peck rates. It illustrates the failure of Eq. (8)o account for the mid-range up-turn; it is only able to produce
bitonic function. Neither matching (Eq. (8)) nor optimality (nothown) was able to account for the up-turn. Killeen (1994) “math-matical principles of reinforcement,” with an equation similar toq. (3), likewise can account for the down-turn at high food rates,ut not the up-turn in the mid-range.
. Further development
As Fig. 2 indicates, the region of low-to-moderate food ratesissing from the VI peck rates also must be included in a full
ccount of VI performance. That range of food rates has ofteneen described by the hyperbola in Eq. (3) (Herrnstein, 1970). VIeck rates in that range conform to a concave-downward pat-ern, only the tail end of which is shown in Fig. 2. Although theresent induction model fits the VI peck rates well (Fig. 3), its
ailure to accommodate the inflection point marking the transi-ion from the concave-downward pattern to the concave-upwardattern requires further development.
The up-turn in the mid-range of food rates may result from a
Please cite this article in press as: Baum, W.M., The role of induchttp://dx.doi.org/10.1016/j.beproc.2015.01.006
hift in topography of key pecking as the rich VI schedules comeore and more to resemble ratio schedules. The resemblance may
e understood as resulting from the change in shape of the VIeedback function. Though negatively accelerated, the VI feedback
tted with the induction model assuming power-function induction (Eqs. (11) and
function becomes closer and closer to linear as the asymptoticfood rate increases. The changed topography of pecking wouldresemble more and more the topography characteristic of peckingon VR schedules reported by Palya (1992) as “flicking” at thekey, called “swiping” at the key by Baum and Davison (2014b),that results in multiple operations of the key for a single back-
tion in operant schedule performance. Behav. Process. (2015),
Fig. 5. Comparison of fitting parameters for VI peck rates (Fig. 3) with those for VRpeck rates (Fig. 4).

ARTICLE IN PRESSG ModelBEPROC 2990 1–8
6 W.M. Baum / Behavioural Processes xxx (2015) xxx–xxx
F peck rt nd tor
mrmtBp
d1doE
K
wm1
mt
B
s
B
O M M OHow would the induction model treat the low-to-moderate
range of food rate that is missing from the present data set? Assum-ing power-function induction (Eqs. (11) and (12)), we may conclude
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
ig. 6. Comparison of the induction model with matching theory applied to mean
o VR peck rates (right). Bottom: matching theory fitted to the VI peck rates (left) aange of peck rates.
ulti-operation increasingly replacing single-operation as foodate increases from moderate to high. This change in topography
ight also explain the upturn in peck rates at high food rateshat Baum and Davison (2014b) attributed to pecking B replacingO. If so, one might assume that BO always replaces pecking. Thisossibility remains to be explored.
For matching theory, the shift in topography would imply twoifferent activities with two different tempos (Baum and Rachlin,969; Gilbert, 1958). The single-operation activity, BS, would haveifferent units and a different asymptotic rate, KS, from the multi-peration activity, BM, which would have the asymptotic rate KM.q. (8) would be replaced by:
BM + uBS
BM + uBS + BO + BN= r
r + rO + rN(14)
where, u = KMKS
as a correction for the different units and
M = BM + uBS + BO + BN .
One way optimality theory could approach the performanceould be to suppose a four-dimensional space with performanceinimizing distance from a bliss point (e.g., Rachlin and Burkhard,
978; Staddon, 1983).For the present line of theory based on induction, the solution is
uch simpler. We need only assume that BM is induced accordingo a power function:
M = cMrSM (15)
Please cite this article in press as: Baum, W.M., The role of induchttp://dx.doi.org/10.1016/j.beproc.2015.01.006
and that in the hierarchy of activities, BM replaces BS, repre-ented as:
N < BS < BM < BO,
ates from Baum (1993). Top: the induction model fitted to VI peck rates (left) and VR peck rates (right). Matching theory cannot accommodate the concave-upward
implying that BO replaces BM at the extreme food rates. Fig. 7illustrates the way the model would accommodate the threeregions of VI peck rates. The squares show the mean peck ratesacross the four pigeons. In the low-to-moderate range of food rate,BS replaces BN (BN < BS; lower solid line). In the moderate-to-highrange, BM replaces BS (BS < BM; broken line). In the extreme rates,B replaces B (B < B ; upper solid line).
tion in operant schedule performance. Behav. Process. (2015),
Fig. 7. The three ranges of VI peck rates. In the low-to-moderate range of food rates(solid curve), pecking (BS) replaces true background activities (BN), in the moderate-to-high range (broken line), “flicking” or “swiping” the key (BM) replaces BS, and inthe extremely high range (solid line), other food-induced activities (BO) replace BM.

ARTICLE IN PRESSG ModelBEPROC 2990 1–8
W.M. Baum / Behavioural Processes xxx (2015) xxx–xxx 7
F odelsm el ass(
tbtcr(cc
mdfpp
B
Vap
p
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
ig. 8. Comparison of Herrnstein’s hyperbola (Eq. (3)) with two induction-based matching-like relation to all food-induced activities (Eq. (16)). The “Difference” mod
17)).
hat, in that range, BS and BO both replace BN, but not independently,ecause if they replaced BN independently, the function relating BSo r would be a power function and would appear in logarithmicoordinates as a straight line. The relation between B and r in thatange, however, is concave downward in logarithmic coordinatesBaum, 1981; Baum and Davison, 2014b). Thus, BS and BO mustompete, even as they replace BN, and we require a model of thatompetition. At least two possible models of the competition arise.
One approach would follow Baum and Davison’s reliance on theatching relation as expressed in Fig. 3, but with an important
ifference: K would be replaced with a variable B’ that is a powerunction of r, as in Eq. (12), but B’ would represent, not measuredeck rate, but induced activity, which would result in measuredecking according to:
= B,r
r + rO= crs+1
r + cOrsO(16)
recalling that ro depends on r (Eqs. (10) and (11); the parameter is absorbed into co). Eq. (16) represents a model in which the total
Please cite this article in press as: Baum, W.M., The role of induchttp://dx.doi.org/10.1016/j.beproc.2015.01.006
ctivity induced B’ is partitioned between B and BO according to theroportion of the reinforcer rates r and ro.
A second possible model would assume simply that BO replacesecking in the low-to-moderate range as well as the higher ranges
fitted to data from Catania and Reynolds (1968). The “Partition” model applies aumes simply assumes that other food-induced activities interfere with pecking (Eq.
of r. Measured pecking B would equal the difference betweeninduced pecking B’ and induced other activities BO:
B = crs − cOrsO (17)
Fig. 8 shows the results of fitting Herrnstein’s hyperbola (Eq. (3)),Eq. (16) (“Partition”), and Eq. (17) (“Difference”) to the VI peck ratesreported by Catania and Reynolds (1968) and used by Herrnstein(1970; his Fig. 8) to validate the hyperbola. All three equations fitthe peck rates (diamonds) well and about equally well. Eqs. (16) and(17), though based on different assumptions, are practically indis-tinguishable. Further research will be required to decide betweenthem.
3. Conclusions
Extending Segal’s (1972) concept of induction to operant activ-ities and quantifying it by assuming power-function inductionaffords quantitative accounts of operant performance that areplausible and simple (Baum, 2012; Baum and Davison, 2014b).
tion in operant schedule performance. Behav. Process. (2015),
Although VR performance conforms to a simple bitonic invertedU-shape (Figs. 1, 4, and 6), that is relatively easy to account forwith matching, optimality, and induction, VI performance presentsa more complicated picture. VI performance may be divided into
354
355
356
357

ING ModelB
8 l Proce
tephitrilh1paldbpritist(f
R
B
B
B
B
B
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
ARTICLEEPROC 2990 1–8
W.M. Baum / Behavioura
hree ranges of food rate: low-to-moderate, moderate-to-high, andxtremely high (Figs. 1, 2, and 7). In the low-to-moderate range,eck rates display a concave downward relation to food rate thatas often been fitted with the hyperbola in Eq. (3) in the past. An
nflection point occurs in the moderate range as the VI peck ratesurn from the concave downward relation to a concave upwardelation in the moderate-to-high range (Figs. 1, 2, and 7). Match-ng theory and optimality do not accommodate this shift (Fig. 6), ateast not without many more assumptions. Finally, in the extremelyigh range, VI peck rate falls as r increases to the maximum (Figs., 2, and 7). A model based on power-function induction fitted VIeck rates from the moderate to the extreme food rates (Figs. 3nd 6), but it failed to pick out the inflection point because theow-to-moderate range of food rate was largely missing from theata (Baum, 1993). A full account based on induction appears toe possible, because at least two models of competition betweenecking and other activities are possible, as shown in Fig. 8. Furtheresearch with a still broader range of food rates should allow thenduction model to be applied to the full range of VI peck rates. Fur-her research might also explore the generality of power-functionnduction, hierarchical replacement, and topography shifts in otherituations and other species. Although evidence thus far suggestshat the model applies to pigeon’s pecking and rat’s lever pressingBaum and Davison, 2014b), only more tests with wide ranges ofood rates and other species will tell.
eferences
aum, W.M., 1974. On two types of deviation from the matching law: bias andundermatching. J. Exp. Anal. Behav. 22, 231–242.
aum, W.M., 1979. Matching, undermatching: and overmatching in studies ofchoice. J. Exp. Anal. Behav. 32, 269–281.
aum, W.M., 1981. Optimization and the matching law as accounts of instrumental
Please cite this article in press as: Baum, W.M., The role of induchttp://dx.doi.org/10.1016/j.beproc.2015.01.006
behavior. J. Exp. Anal. Behav. 36, 387–403.aum, W.M., 1992. In search of the feedback function for variable-interval
schedules. J. Exp. Anal. Behav. 57, 365–375.aum, W.M., 1993. Performances on ratio and interval schedules of reinforcement:
data and theory. J. Exp. Anal. Behav. 59, 245–264.
PRESSsses xxx (2015) xxx–xxx
Baum, W.M., 2012. Rethinking reinforcement: allocation, induction: andcontingency. J. Exp. Anal. Behav. 97, 101–124.
Baum, W.M., Davison, M., 2014a. Choice with frequently-changing food rates andfood ratios. J. Exp. Anal. Behav. 101, 246–274.
Baum, W.M., Davison, M., 2014b. Background activities, induction, and behavioralallocation in operant performance. J. Exp. Anal. Behav. 102, 213–230.
Baum, W.M., Rachlin, H.C., 1969. Choice as time allocation. J. Exp. Anal. Behav. 12,861–874.
Breland, K., Breland, M., 1961. The misbehavior of organisms. Am. Psychol. 16,681–684.
Catania, A.C., Reynolds, G.S., 1968. A quantitative analysis of the respondingmaintained by interval schedules of reinforcement. J. Exp. Anal. Behav. 11,327–383.
Davison, M., 1993. On the dynamics of behavior allocation between simultaneouslyand successively available reinforcer sources. Behav. Proces. 29, 49–64.
Davison, M., 2004. Interresponse times and the structure of choice. Behav. Proces.66, 173–187.
Davison, M., McCarthy, D., 1988. The Matching Law: A Research Review. ErlbaumAssociates, Hillsdale, NJ.
de Villiers, P., 1977. Choice in concurrent schedules and a quantitative formulationof the law of effect. In: Honig, W.K., Staddon, J.E.R. (Eds.), Handbook of OperantBehavior. Prentice-Hall, Englewood Cliffs, NJ, pp. 233–287.
Gilbert, T.F., 1958. Fundamental dimensional properties of the operant. Psychol.Rev. 65, 272–285.
Herrnstein, R.J., 1961. Relative and absolute strength of response as a function offrequency of reinforcement. J. Exp. Anal. Behav. 4, 267–272.
Herrnstein, R.J., 1970. On the law of effect. J. Exp. Anal. Behav. 13, 243–266.Killeen, P.R., 1994. Mathematical principles of reinforcement. Behav. Brain Sci. 17,
105–171.Lima, S.L., Dill, L.M., 1990. Behavioral decisions made under the risk of predation: a
review and prospectus. Can. J. Zool. 68, 619–640.Palya, W.L., 1992. Dynamics in the fine structure of schedule-controlled behavior. J.
Exp. Anal. Behav. 57, 267–287.Rachlin, H., Burkhard, B., 1978. The temporal triangle: response substitution in
instrumental conditioning. Psychol. Rev. 85, 22–47.Segal, E.F., 1972. Induction and the provenance of operants. In: Gilbert, R.M.,
Millenson, J.R. (Eds.), Reinforcement: Behavioral Analyses. Academic, NewYork, pp. 1–34.
Soto, P.L., McDowell, J.J., Dallery, J., 2005. Effects of adding a second reinforcementalternative: Implications for Herrnstein’s interpretation of re. J. Exp. Anal.Behav. 84, 185–225.
tion in operant schedule performance. Behav. Process. (2015),
Staddon, J.E.R., 1977. Schedule-induced behavior. In: Honig, W.K., Staddon, J.E.R.(Eds.), Handbook of Operant Behavior. Prentice-Hall, Englewood Cliffs, NJ, pp.125–152.
Staddon, J.E.R., 1983. Adaptive Behavior and Learning. Cambridge University Press,Cambridge.
434
435
436
437
438