Embed Size (px)
Citation preview

Availability Analysis and Enhanced Availability Designin p-Cycle-Based Networks
Matthieu Clouqueur�, Wayne D. Grover*TRLabs and Department of Electrical and Computer Engineering, University of Alberta,
7th Floor, 9107 116 St, NW, Edmonton, AB T6G-2V4 Canada
E-mail: [email protected], [email protected]
Received June 1, 2004; Revised February 24, 2005; Accepted March 3, 2005
Abstract. p-Cycle protection is a fairly new survivability scheme that has the interesting properties of offering restoration speeds
essentially the same as those offered by ring protection while requiring almost as little redundant capacity as adaptive mesh restoration
[D. Stamatelakis, W.D. Grover, IEEE Transactions on Communications, vol. 48, no. 8, (August 2000), pp. 1262–1265]. This paper
presents the first analytical consideration of the availability of paths in a network protected by p-cycles. Results confirm the importance
that cycle sizes play in terms of availability and suggests principles or strategies for achieving high availability of paths in a network
protected by p-cycles. Based on these insights, two new formulations for joint service path provisioning and capacity planning are
proposed. The first one offers a way to improve the availability of selected service paths by using a different routing strategy for them
than for regular service paths. The second formulation enables a new class of service paths that are offered two protection options
instead of just one. That class of service paths is expected to see its availability improved in a quantum step way relative to the
availability of paths having only one protection option.
Keywords: p-cycle, availability analysis, optical transport networks, network survivability
1 Introduction
1.1 Background
Network survivability has been a topic of greatimportance for many years now, and varioustypes of survivability schemes have been devel-oped. Survivability schemes can be divided intotwo classes: protection schemes and restorationschemes. Protection refers to the type of schemesfor which the details of the response to networkfailures are known in advance. In other words,with protection schemes, backup paths that willbe used to replace failed working paths are pre-planned and, upon a failure, the response can beas simple as switching two end-nodes to a pre-connected and already operating backup path.Such pre-planned and pre-connected survivabilityschemes offer the fastest recovery possible tofailures. With other protection schemes, however,
the backup paths to be used in response to afailure may have to be cross-connected upon theoccurrence of the failure, making the recoveryslower. Restoration refers to schemes for whichthe details of the response to network failures arenot known ahead of time and are determinedadaptively in response to actual network condi-tions at the time of the failure. In other words,with restoration schemes, available backup paths– in this case referred to as restoration paths – aresearched at the time of the failure, based on thecurrent state of the network. Although it is oftenconsidered that ‘‘protection means fast recovery’’and ‘‘restoration means slow recovery,’’ we needto stress that only pre-connected protectionschemes offer a really significant advantage interms of recovery speed over restoration mecha-nisms. The p-cycle protection mechanism is ofthat type [1].
*Corresponding author.�Siemens AG, Corporate Technology, Information and Communications, Otto-Hahn-Ring 6, D-81730 Munich, Germany.
Photonic Network Communications, 10:1, 55–71, 2005
� 2005 Springer ScienceþBusiness Media, Inc., Manufactured in The Netherlands.

The objective of virtually all survivabilityschemes – either protection or restoration – is toguarantee the replacement of all affected servicepaths in the event of any single network failure.Most of the time, ‘‘single network failures’’ meanssingle fibre cuts – or more generally, cuts of singleedges of the network graph. An important topic ofresearch related to network survivability is thedevelopment of methods to determine the locationand the amount of extra transmission capacity thatneeds to be placed in the network to meet therequirement of full restorability of any single fail-ure. This topic, referred to as spare capacity design,has been studied in several papers for p-cycle basednetworks [2,3].
Another topic of interest in network survivabilityis the analysis of the effects of failures onnetworks inwhich a survivability scheme and spare capacityplan is in place. Although networks that are fullyrestorable to single cuts are often termed ‘‘100%restorable,’’ there are still higher-order failurecombinations fromwhich such networks will not beable to recover fully.What thismeans is thatmakinga network fully restorable to single failures is not aguarantee that the availability of service paths willbe 100%. Being able to analyze the factors that affectanddetermine the availability of service is not just ofinterest from an academic standpoint; it has becomea crucial capability for network operators that needto offer guarantees to their customers in terms ofservice availability. These guarantees are commonlyspecified in service level agreements (SLA) that, forinstance, can specify themaximum total outage timetolerable per month for a given service. Typically,when the SLA is not realized on the service pro-vider’s side, the customer will receive free service inthe following month. Given this, it is vital for net-work operators to have an accurate idea of the ex-pected service availability they are providing to theircustomers in order to be able to offer competitiveSLAs without taking too much risk of paying pen-alties. The question of analyzing service availabilityhas been studied in detail already for ring-basedsurvivable networks [4], and for mesh-based sur-vivable networks [5], but it has not been studied yetfor the case of p-cycle protection.
1.2 Scope of Paper
The first aim of this paper, treated in Section 2, isto develop an analytical expression for the avail-
ability of paths in networks using p-cycles as theprotection mechanism. The model presented isbased on the calculation of the unavailabilitycaused by the effects of dual-failures. A detailedmodel is presented as well as a simplified modelobtained using reasonable assumptions to limit thenumber of variables and allow numerical com-parisons of the availability of two types of paths.We also analyze the influence of two main topo-logical characteristics of the p-cycles used on pathavailability.
Based on the insights gained from the serviceavailability expressions developed in Section 2,Section 3 introduces two new models for simulta-neous path routing and capacity design (referredto as ‘‘joint’’ design models) for p-cycle networksthat serve a class with higher availability require-ments in addition to the traditional single-failure-protected class. With the first model, SEACP(Selectively Enhanced Availability CapacityPlacement), the new class is offered higher avail-ability simply by using a different routing strategy– inspired by results of the availability analysis –for service paths of that class. With the secondmodel, the new class is offered a much higheravailability improvement as it is provided with twoprotection options at every point of its travel, in-stead of just one, therefore making it logicallyprotected against dual failures instead of just sin-gle failures.
Section 4 summarizes the findings and suggestsrelated future developments.
1.3 p-Cycle Protection
The main principle of p-cycle protection is por-trayed in Fig. 1. A p-cycle, shown in Fig. 1(a), is aclosed path composed of spare capacity links1.When a failure occurs on a span covered by thecycle, the p-cycle provides one backup path forrestoring one link on the failed span, as shown inFig. 1(b). In this regard, the p-cycle concept isidentical to that of the well-known bi-directionalline switched rings (BLSR), except that a p-cyclerepresents only one unit of protection capacitywhereas a BLSR provides protection capacity atthe line level. The main difference between ringsand p-cycles is that p-cycles can also protectstraddling spans – the spans that have both endson the cycle but do not themselves lie on the cycle–as shown in Fig. 1(c) and (d). This apparently
56 M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks
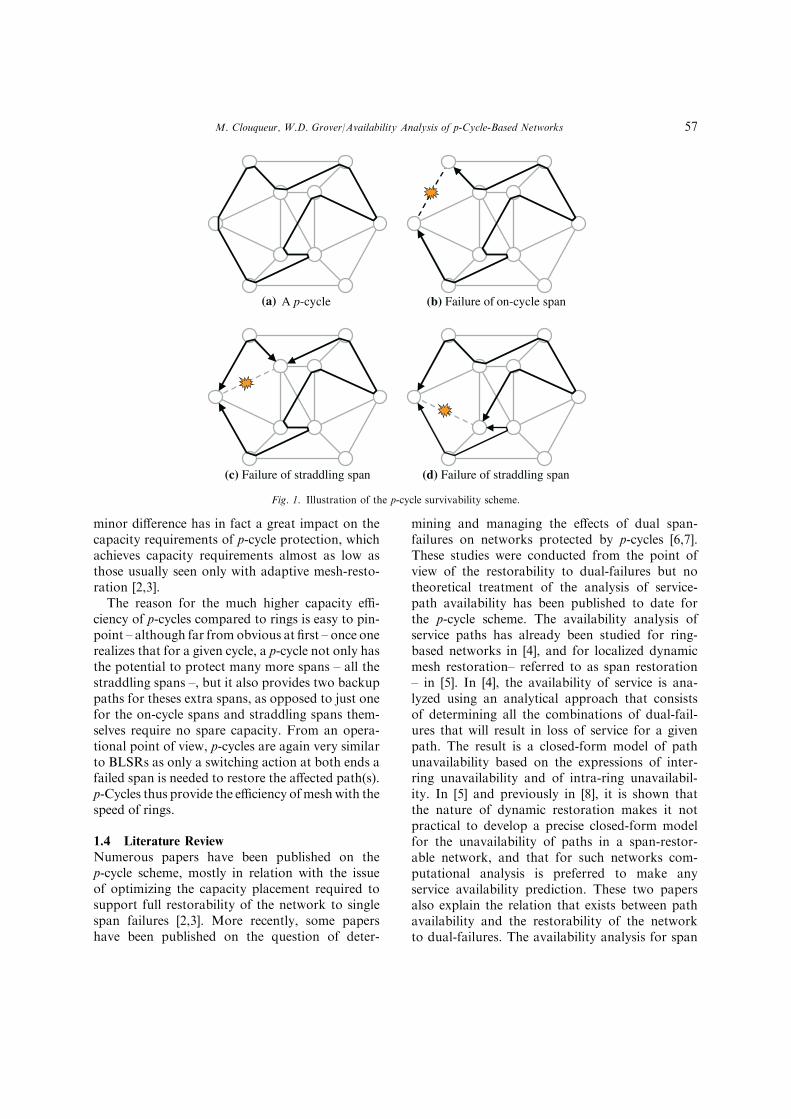
minor difference has in fact a great impact on thecapacity requirements of p-cycle protection, whichachieves capacity requirements almost as low asthose usually seen only with adaptive mesh-resto-ration [2,3].
The reason for the much higher capacity effi-ciency of p-cycles compared to rings is easy to pin-point – although far from obvious at first – once onerealizes that for a given cycle, a p-cycle not only hasthe potential to protect many more spans – all thestraddling spans –, but it also provides two backuppaths for theses extra spans, as opposed to just onefor the on-cycle spans and straddling spans them-selves require no spare capacity. From an opera-tional point of view, p-cycles are again very similarto BLSRs as only a switching action at both ends afailed span is needed to restore the affected path(s).p-Cycles thus provide the efficiency ofmeshwith thespeed of rings.
1.4 Literature Review
Numerous papers have been published on thep-cycle scheme, mostly in relation with the issueof optimizing the capacity placement required tosupport full restorability of the network to singlespan failures [2,3]. More recently, some papershave been published on the question of deter-
mining and managing the effects of dual span-failures on networks protected by p-cycles [6,7].These studies were conducted from the point ofview of the restorability to dual-failures but notheoretical treatment of the analysis of service-path availability has been published to date forthe p-cycle scheme. The availability analysis ofservice paths has already been studied for ring-based networks in [4], and for localized dynamicmesh restoration– referred to as span restoration– in [5]. In [4], the availability of service is ana-lyzed using an analytical approach that consistsof determining all the combinations of dual-fail-ures that will result in loss of service for a givenpath. The result is a closed-form model of pathunavailability based on the expressions of inter-ring unavailability and of intra-ring unavailabil-ity. In [5] and previously in [8], it is shown thatthe nature of dynamic restoration makes it notpractical to develop a precise closed-form modelfor the unavailability of paths in a span-restor-able network, and that for such networks com-putational analysis is preferred to make anyservice availability prediction. These two papersalso explain the relation that exists between pathavailability and the restorability of the networkto dual-failures. The availability analysis for span
A p-cycle (b) Failure of on-cycle span
(c) Failure of straddling span (d) Failure of straddling span
(a)
Fig. 1. Illustration of the p-cycle survivability scheme.
M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks 57

restoration is therefore based on a detailed anal-ysis of the restorability of the network to all dualspan-failures scenarios. p-Cycle protection being apre-planned survivability scheme like ringprotection, the present study of path availabilityin p-cycle networks follows the same approach asthe study in [4].
Other publications relevant to the present studyare by Schupke [6,7], where the restorability ofp-cycle based networks to all dual span-failures orto selected dual span-failures belonging to sets ofshared risk link groups (SRLG) is studied. Heinvestigates how the number of cycles deployedand their diversity influence the restorability todual span-failures.
More recently, we conducted another study withSchupke [9], in which we investigated the possi-bility of improving the dual-failure restorability ofp-cycle networks with various strategies using ei-ther static p-cycles (the p-cycles used are notchanged after a failure), or reconfigurable p-cycles(after a failure, surviving and unused sparecapacity can be reorganized to form new p-cyclesthat maximize the protection of the networkagainst any subsequent failure). Some of the for-mulations in [9] can guarantee full protection of allserved demands against any dual span-failure.Results of [9] show that, similarly to the case ofdynamic mesh-restoration [10], the amount ofspare capacity required to protect all demandsagainst any dual span-failure is typically in theorder of three times the amount required to pro-tect against single failures only, and the totalcapacity cost for the whole network would oftenincrease by more than 50%. Since it is clear thatthis would be cost-prohibitive for most networkoperators, this paper investigates an alternativeapproach, which consists of improving the avail-ability of only selected service paths insteadof trying to improve the availability of all pathsindistinctively. The study in [10] showed that thisapproach can give very interesting results for span-restorable mesh networks. Indeed, in [10], it wasseen that with most test networks, up to 30 or 40%of service paths could be offered a guarantee ofdual-failure restorability for a very minor increasein total capacity requirement. The question ofwhether the same strategy would give similar re-sults in the case of p-cycle protection is therefore ofgreat interest.
2 Theoretical Study of Path Availability
2.1 Assumptions
As explained in [5], service path unavailability isdetermined by many factors including the statis-tics of network element failures, the statistics ofrepair times, mean restoration time, etc. A com-mon and often most practical approach todetermine service availability is to use the ‘‘cut-sets method,’’ which consists of identifying cate-gories of failure types that cause service outageand summing the probabilities of the most likelyfailure types to obtain an estimate of the expectedaverage service unavailability. One importantfinding of [5] is that, while single span-failures aremuch more frequent than any other type of fail-ures, their contribution to service path unavail-ability is extremely small in a fully restorablenetwork because they only expose service paths toa small restoration time ‘‘outage’’ as opposed tothe very long outage times (in the order of thetime to physically repair a failure) experienced bypaths when they are not restored during a dual-failure event. Simple calculations show that this istrue whether restoration time is in the order of50 ms or as long as 1 or 2 s. In other words, whatthis says is that restoration time is not the mostimportant factor that determines the availabilityof service. Numerical examples in [5] show thatthe effects of dual span-failures are in fact muchmore important in the determination of expectedservice path availability in long-haul networks,and considering dual span-failures only is suffi-cient to obtain a good estimate of the expectedavailability of service2. Ignoring the contributionof restoration times to unavailability in p-cyclenetworks is even more reasonable because, asexplained earlier, p-cycle restoration times areindeed expected to be in the order of 50-80 ms,not even 2 s. The present study is therefore basedpurely on the effects of dual span-failures andignores the effects of restoration times.
2.2 Protection Domains
To develop the equations for path availability ina p-cycle protected network we now start byexplaining the concept of protection domain.Between its origin node and destination node, apath crosses several protection domains, each of
58 M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks

which is associated with a given cycle. Forexample, to say that a path p crosses a protec-tion domain associated to cycle x means that, atsome point, path p is protected by a p-cycle lyingon cycle x. For each protection domain crossed(and its associated cycle,) the path is eitherstraddling the cycle (it lies on a span thatstraddles the cycle, as explained in Section 1.3)or it is on-cycle, but it cannot be both. What wemean is that if path p is protected by a p-cycleon cycle x as an on-cycle path and also as astraddling path for the same cycle, these willcount as two separate protection domains. If,however, on multiple on-cycle spans (or respec-tively straddling spans) for cycle x, path p isprotected by p-cycles on cycle x, this will countas only one protection domain.
For a path p crossing a protection domainassociated to cycle x, the following notations willbe used:
S cx Set of spans on cycle x
S sx Set of spans straddling cycle x
S cp;x Set of spans on cycle x and on which path p
is protected by a p-cycle on cycle xS sp;x Set of spans straddling cycle x and on
which path p is protected by a p-cycle lyingon cycle x.
2.3 Outage Causing Dual-Failure Sequences
in Single p-CyclesWe now derive the set of all dual span-failuresequences that lead to outage for a given path in ap-cycle protected network. Each of these sequencesis independent from the others, i.e., with respect toa given path a dual span-failure can only belong toone of these sequences. This will later facilitate the
calculation of path availability since we will beable to add the probability of each of these se-quences to determine the path unavailability.
The first two dual span-failure sequences are foran on-cycle path p in a given protection domain. InFig. 2, we show the case of a first failure on thepath itself followed by a second failure elsewhereon the cycle. Since p-cycles only offer one protec-tion option for an on-cycle path, this is guaranteedto cause outage for the path. Obviously, the casewhere these two failures happen in the reverse or-der is also guaranteed to cause outage for the path.The combined probability of a failure sequence ofthis type (and the reverse one) is given by
Pðseq. 1Þ ¼ S cp;x
���
��� ��
jS cx j � 1
�
�U2s ð1Þ
where Us denotes the physical unavailability ofspans in the network. This analysis assumes thateach span has the same Us. This is because the aimhere is to get a general understanding of whatfactors influence the most path availability inp-cycle networks. Extensions of the expressionsdeveloped in this paper to consider span-specificUs values would be fairly straightforward.
In Fig. 3, we show the second type of dual span-failure sequence that is guaranteed to cause outagefor an on-cycle path p. In this case, a first span-failure hits a straddling span and that span re-quires at least one protection path on the p-cycleprotecting path p. Note that, unlike in the previouscase, the same failure combination wouldnot cause outage for path p if the failureshappened in the reverse order since path p wouldbe switched to the backup path (on the p-cycle)and that backup path would not be affected by thesecond failure.
(a) No failure (b) After first failure (c) After second failure
Fig. 2. Dual-failure sequence leading to outage for on-cycle path, sequence 1.
M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks 59

The probability of this second span-failure se-quence is given by (2). In that equation,Ps
x; 1 rep-resents the probability that the failure of a spanstraddling cycle x will require the use of exactlyone backup path on a given p-cycle on cycle x andPs;2x represents the probability that the failure of a
span straddling cycle x will require the use of ex-actly two backup paths on a given p-cycle on cyclex. The 0.5 factor represents the probability that thestraddling span failure happens first.
Pðseq. 2Þ ¼ jS sxjjS c
p;xj �1
2�U2
s � Ps;1x þ Ps;2
x
� �
ð2Þ
To continue, the following four dual span-failure sequences are for a straddling path in agiven protection domain. In the first sequence,portrayed in Fig. 4, the first span failure affectsthe straddling path and the second failure hits thebackup path of the straddling path. When an on-cycle failure happens following restoration of astraddling path, there is on average a 50% chancethat it hits the backup path used to restore thestraddling path –that is because the backup pathfor the straddling path uses on average only halfof the p-cycle. If the same failure combinationhappens but the order of the failures is reversed,
then outage for the straddling path is guaranteed.Given this (un-ordered) combination of failures,the probability of outage for the considered pathis therefore 75%. The combined probability of asequence of this type (including the reverse order)is given by (3).
Pðseq. 3Þ ¼ S sp;x
���
��� � S c
x
���� � 3
4�U2
s ð3Þ
Figure 5 portrays the case where the first span-failure happens on a straddling span not crossedby the straddling path and that span requires twobackup paths on the p-cycle protecting the strad-dling path. The second path failure hits thestraddling path and restoration of the straddlingpath is not possible since the p-cycle is alreadyfully used for restoration of the first failure. Forthis failure combination, the reverse order wouldnot cause outage for the straddling path. Theprobability of a failure sequence of this type isgiven by (4). In that expression, the negative termin the left brackets accounts for the fact that ifthe path crosses multiple straddling spans of thep-cycle, some of these dual-straddling span failurecombinations (the ones involving two straddlingspans crossed by the considered path) wouldotherwise be counted twice.
(a) No failure (b) After first failure (c) After second failure
Fig. 3. Dual-failure sequence leading to outage for on-cycle path, sequence 2.
(a) No failure (b) After first failure (c) After second failure
Fig. 4. Dual-failure sequence leading to outage for straddling path, sequence 3.
60 M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks

Pðseq. 4Þ ¼ S sp;x
���
��� � S s
x
�����1
� �
� S sp;x
���
���
2
!" #
� 12�U2
s � Ps;2x ð4Þ
The sequence illustrated on Fig. 6 shows a firstspan-failure affecting a straddling span not crossedby the straddling path considered, and that spanrequires only one backup path on the p-cycle pro-tecting the straddling path considered (hence mak-ing this case independent from the previoussequence in which the first failed span required twobackup paths). The second span failure affects thestraddling path and the configuration of the backuppath used by the first failure prevents a backup pathfor the straddling path to be used. In this particularcase, the reasonwhy a backup path cannot be foundfor the straddling path is that the first failed span isin a crossing situation with the second failed strad-dling span. Figure 7 illustrates the concept ofcrossing straddlers. In the left part of Fig. 7, thenetwork graph is represented as on every previousfigure and one can see that the two failed straddlersin sequence 5 correspond to spans (2–6) and (4–7).On the right part of Fig. 7, the network graph isredrawn to show the example p-cycle in expendedform.On this representation of the graph, it appearsclearly that span (2–6) and span (4–7) are crossing
inside the cycle. For obvious reasons, even if bothspans require only one backup path from the con-sidered p-cycle, only one of the two spans can beoffered a backup path at the same time.
The probability of a failure sequence of the typeshown in Fig. 6 is given by (5). In that equation,Kx represents the percentage of crossing-straddlercombinations out of all straddler combinations ofcycle x.
Pðseq. 5Þ¼ Ssp;x
���
��� � Ss
x
�����1
� �
� Ssp;x
���
���
2
!" #
�12�U2
s �Kx �Ps;1x ð5Þ
Finally, Fig. 8 represents the sequence of a firstfailure occurring on a straddler not crossed by thestraddling path followed by the failure of the
(a) No failure (b) After first failure (c) After second failure
Fig. 5. Dual-failure sequence leading to outage for straddling path, sequence 4.
(a) No failure (b) After first failure (c) After second failure
Fig. 6. Dual-failure sequence leading to outage for straddling path, sequence 5.
4
5
6
1
9
2
3
7
8
2
3
5
6
4
7
8
9
1
Fig. 7. Illustrating the concept of crossing straddlers.
M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks 61

straddling path on a span that is in a non-crossingsituation with the first failed span. In this situa-tion, there is only a 25% chance for the secondfailed link to be restorable –we assume that eachstraddling path has a pre-determined backup pathfor each span and cannot use the backup path onthe other side of the p-cycle if the pre-determinedbackup path is not available. If the same failurecombination happens in reverse order, path p willnot suffer outage.
The probability of a failure sequence of the typepresented in Fig. 8 is given by (6).
Pðseq. 6Þ¼ Ssp;x
���
��� � Ss
x
�����1
� �
� Ssp;x
���
���
2
!" #
�12�U2
s � 1�Kxð Þ �34�Ps;1
x ð6Þ
2.4 Path Unavailability
The unavailability of a path in a p-cycle protectednetwork can be expressed as the sum of theunavailability3 of the path in the different protec-tion domains crossed:
UpathðpÞ ¼X
o2OðpÞUp;o ð7Þ
where O( p) is the set of protection domains cros-sed by path p and Up,o is the unavailability of pathp in protection domain o.
For a protection domain in which path p is anon-cycle path, we have:
Up;o ¼ U cp;o ¼ Pðseq. 1Þ þ Pðseq. 2Þ ð8Þ
For a protection domain in which path p is astraddling path, we have:
Up;o ¼U sp;o ¼ Pðseq. 3Þ þ Pðseq. 4Þþ Pðseq. 5Þ þ Pðseq. 6Þ ð9Þ
Some simplifications of the probability expres-sions can be made if we assume that Ps;2
x is always1, i.e. if all straddling spans require two backuppaths on all p-cycles that can protect them. In thatcase, (2) becomes:
Pðseq. 2Þ ¼ S sx
���� S c
p;x
���
��� � 1
2�U2
s; ð10Þ
and (4) becomes
Pðseq. 4Þ¼ Ssp;x
���
��� � Ss
x
�����1
� �
� Ssp;x
���
���
2
!" #
�12�U2
s; ð11Þ
which can be simplified to:
Pðseq. 4Þ¼ Ssp;x
���
��� � Ss
x
�����1
� �
�Ssp;x
���
����1
� �
2
2
4
3
5
�12�U2
s : ð12Þ
Also, in that case, we have:
Pðseq. 5Þ ¼ Pðseq. 6Þ ¼ 0: ð13Þ
Finally, for a protection domain in which path pis an on-cycle path, we have:
U cp;o ¼jS c
p;xj � jS cx j � 1
� �
�U2s
þ jS sxj � jS c
p;xj �1
2�U2
s ð14Þ
(a) No failure (b) After first failure (c) After second failure
Fig. 8. Dual-failure sequence leading to outage for straddling path, sequence 6.
62 M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks

Ucp;o ¼ S c
p;x
���
��� � jS c
x j þ1
2� jS s
xj � 1
� �
�U2s
ð15Þ
where x is the cycle associated to protection do-main o.
For a protection domain in which path p is astraddling path, we have:
Usp;o ¼ Ss
p;x
���
��� � Sc
x
���� � 34�U2
sþ Ssp;x
���
���
� S sx
����� 1
� �
�Ssp;x
���
���� 1
� �
2
2
4
3
5 � 12�U2
s
ð16Þ
Usp;o¼ Ss
p;x
���
��� �"
Scx
���� �34:
þ Ssx
�����1
� �
�Ssp;x
���
����1
� �
2
0
@
1
A �12
3
5 �U2s
ð17Þ
Usp;o ¼ S s
p;x
���
��� � 3
4� S c
x
����þ 1
2
�
� S sx
����� 1
4� S s
p;x
���
���� 3
4
�
�U2s ð18Þ
These results can now be used to obtain variousinsights about routing through networks of p-cy-cles and compare to other schemes.
2.5 On-Cycle vs. Straddling Path Unavailability
Comparison
In this section, we provide a comparison of theunavailability of a path in a given domaindepending on whether the path is an on-cycle pathfor the cycle associated to that domain or astraddling path for that cycle. This comparison isbased on (15) and (18). To allow comparison ofthe unavailability in both cases, we assume that
S cp;x
���
��� is 1 for the on-cycle path and S s
p;x
���
��� is 1 for
the straddling path. What this means is that weassume that in both cases the path stays in thedomain on a single span. As shown by (15) and(18), in both cases the unavailability of the path in
the domain is directly proportional to the numberof spans on which the paths stays in the domain(more generally, the total length). The results ofthe comparison will therefore remain valid withother values of S c
p;x
���
��� and S s
p;x
���
���.
The first factor we investigate is the number ofon-cycle spans for cycle x associated to the do-main. The unavailability of the on-cycle path andof the straddling path were calculated for a num-ber of on-cycle spans varying from 4 to 20. Forthese calculations, the number of straddling spanswas fixed to two and the average span physicalunavailability, Us, was assumed to be 10)3. Resultsare shown in Fig. 9. The results show that for boththe on-cycle path and the straddling path, theunavailability grows proportionally to the numberof on-cycle spans. For both cases, the unavail-ability with 20 on-cycle spans is 6.67 times higherthan with four on-cycle spans. Results also show asignificantly lower unavailability for the straddlingpath. The absolute difference between the avail-ability of the on-cycle path and that of the strad-dling path increases with increasing number ofon-cycle spans. In terms of percentage, the avail-ability of the straddling path is 25% lower that thatof the on-cycle path for all values of the number ofon-cycle spans. In simple terms, the difference canbe explained by the fact that on-cycle paths havelonger backup paths and are therefore two timesmore exposed (on average) to the risk of having asecondary failure hit their backup path comparedto straddling spans. As the number of on-cyclespans increases, the difference in average backuppath length of on-cycle spans increases twice asfast as that of straddling spans, explaining theincreasing absolute difference in unavailability.With the values assumed for the different param-eters, the resulting domain unavailability is in theorder of 10)5, which corresponds to a statisticalaverage of 5 min/year, or a 6 hour outage every68.5 years.
Figure 10 shows the effects of varying thenumber of straddling spans on the same twounavailability measures we just compared. Thenumber of straddling spans was varied between 2and 18 and we assumed 10 on-cycle spans and thesame span physical unavailability as in the previ-ous calculation. Here again, the unavailability ofpaths increases linearly with the increasing numberof straddling spans but the increase is not as fast as
M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks 63

with an increasing number of on-cycle spans. Be-tween 2 and 18 straddling spans the unavailabilityof the on-cycle path increases by a factor 1.89 andthe unavailability of the straddling path increases
by a factor 2.21. The absolute difference betweenthe unavailability measures for both types of pathsremains constant in this case, which means that therelative different decreases as the number of spans
0.0E+00
2.0E-06
4.0E-06
6.0E-06
8.0E-06
1.0E-05
1.2E-05
1.4E-05
1.6E-05
1.8E-05
2.0E-05
2.2E-05
4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Number of on-cycle spans
Dom
ain
unav
aila
bilit
yon-cycle
straddling
|S p ,xs| = 1
|S p ,xc| = 1
|S xs| = 2
U s = 10-3
Fig. 9. Comparison of on-cycle and straddling unavailability for varying number of on-cycle spans.
0.0E+00
2.0E-06
4.0E-06
6.0E-06
8.0E-06
1.0E-05
1.2E-05
1.4E-05
1.6E-05
1.8E-05
2.0E-05
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
Number of straddling spans
Dom
ain
unav
aila
bilit
y
on-cycle
straddling
|S p ,xs| = 1
|S p ,xc| = 1
|S xc| = 10
U s = 10-3
Fig. 10. Comparison of on-cycle and straddling unavailability for varying number of straddling spans.
64 M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks

increases, but with 18 straddling spans, the relativedifference is still 18.9% in favor of the straddlingpath.
2.6 Insights Gained
These results tell us that the size of p-cycles plays amajor role in determining the availability of servicepaths that traverse their domains. Small p-cycleswill allow much higher availability to be offered topaths. Not surprisingly, limiting the size of p-cyclesmay also cause them to be less capacity efficient asshown in [4]. The size of eligible cycles used forp-cycle capacity design can therefore be used as away to control the trade-off between capacityefficiency and availability. This trade-off is ex-pected to look like the curve shown in Fig. 11. Aseligible cycles are allowed to be larger, theachievable capacity cost gets closer and closer to aglobal minimum (corresponding to the absoluteminimum achievable when no restriction is placedon cycle sizes.) It is expected, however that after acertain point (in region A of the curve,) increasingthe maximum allowed cycle size will not improvethe capacity efficiency very much anymore – this isbased on the same reasoning as the hop-limitconcept in span restorable mesh network design asseen in [12] and [13] –, whereas the unavailabilityof paths will continue to increase linearly as seen inthe previous section. Conversely, as the maximumallowed size of eligible cycles is reduced, thecapacity cost will start increasing very rapidly (inregion C) while the unavailability of paths willdecrease linearly. Somewhere in the middle, we arelikely to observe a region (region B of the curve)
where we get a more real trade-off between pathunavailability and capacity cost (both character-istics will change significantly when the eligiblecycle size is varied).
The results of the previous section also showedthat the number of straddling spansdoes alsomatterfor the availability of paths, but not as much as thenumber of on-cycle spans. Since the efficiency ofp-cycles comes essentially from the protection ofstraddling spans, it seems clear that limiting thenumber of protected straddling spans in order toimprove service availability would not be a goodstrategy, and would give only a small improvementof the path availability with high capacity penalties.
The other important finding is that theunavailability of paths that transit on the cyclesthat protect them is significantly higher than thatof paths straddling the p-cycles. This observationis the basis for the first new capacity design andpath provisioning strategy presented in the fol-lowing section.
3 Path Provisioning with Enhanced Availability
This section draws on the results of Section 2 topropose new methods for service path provi-sioning and capacity placement for demands withhigher availability requirements. Based on theobservation that the availability of paths onstraddling spans is higher than that of paths onon-cycle spans, a straightforward idea to improvethe availability of paths in p-cycle networks is toallow protection of capacity only on the strad-dling spans or conversely to arrange paths orcycle choices so that priority services only evertraverse straddlers. In other words, paths wouldnever travel on the cycles but always straddlethem. While this strategy would certainly improvethe availability of paths, it would inevitably alsorequire much more capacity than the traditionalp-cycle paradigm. This is the same problemencountered in previous studies that proposeways to improve the dual-failure restorability ofp-cycle networks [6,7]. Improving the restorability(or equivalently the availability) uniformly overall paths always requires large additions ofcapacity. Following the lines of [10], a morepractical and business-oriented principle is toimprove the restorability only of selected ‘‘priority’’
A
BC
Unavailability
Cap. CostMinimum
Cost
MinimumUnavailability
Minimum possible cycle
size = 3
Increasing size of eligible cycles
Fig. 11. Expected shape of unavailability vs. capacity cost
trade-off.
M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks 65

service paths. For the present problem, thatapproach seems particularly appropriate: a newclass of service (Gold-plus) can be created fordemands with higher availability requirements,and only demands in that class will be restrictedto travel exclusively on straddling spans, whereasother paths (Gold) will still be allowed to berouted either on on-cycle spans or on straddlingspans, whatever turns out to be more beneficialfrom a capacity efficiency viewpoint. This is theidea of the formulation following in Section 3.2.We will then present a second strategy that rep-resents a more significant departure from the tra-ditional principle of p-cycle protection. With thatsecond strategy, demands of the class with higheravailability requirements (Platinum) will also berestricted to straddling spans but, in addition, theywill be offered two protection options instead ofjust one. More details will follow in Section 3.3.Before going into details of the two proposals, westart this section with the definition of the notationsused in the following sections.
3.1 Notations
The following notations are used for sets andparameters:
S Set of spans in the physical network (indexedby i when referring to a failed span, otherwiseindexed by k.)
M Set of capacity module types (indexed by m.)Dg Set of demand relations for the Gold pro-
tection class.Dg+ Set of demand relations for the Gold-Plus
protection class.Dp Set of demand relations for the Platinum
protection class.d r Number of demand units for demand rela-
tion r, "r 2 Dg, "r 2 Dg+, "r 2 Dp
Qr Set of eligible working routes for demandrelation r.
fr;qk Equal to 1 if eligible route q for demandrelation r crosses span k, equal to 0 other-wise, "r 2 Dg, "r 2 Dg+, "r 2 Dp, "q 2 Qr,"k 2 S.
X Set of eligible cycles on which p-cycles can beplaced (indexed by x).
pxk Equal to 1 if eligible cycle x crosses span k,
equal to 0 otherwise, "x 2 X, "k 2 S.
qxk Number of working links on span k that are
protected by a p-cycle on cycle x (2 if span kstraddles cycle x, 1 if span k is on cycle x, 0otherwise), "x 2 X, "k 2 S.
The following notations are used for variables:
gr,q Working flow on route q serving demand rela-tion r, "r 2 Dg, "r 2 Dg+, "r 2 Dp, "q 2 Qr.
wak Number of working capacity units allocated
on span k for paths of protection class a,"k 2 S, 8a 2 g; g+; pf g
nx Number of p-cycles on cycle x in the designsolution, "x 2 X.
sk Number of units of spare (protection) capac-ity allocated on span k, "k 2 S.
nmk Number of modules of type m required onspan k, "m 2 M, "k 2 S.
3.2 Selectively Enhanced Availability Capacity
Placement
The Selectively Enhanced Availability CapacityPlacement (SEACP) formulation jointly optimizesthe routing of demands and the allocation of sparecapacity to find the minimal cost capacity place-ment that allows us to serve all demands followingthe routing constraints described earlier andguarantee that each working capacity link is pro-tected against single span failures.
p�CycleSEACP : MinimizeX
k2S
X
m2MCk �nmk
ð19Þ
Subject to:X
q2Qr
gr;q ¼ d r; 8r 2 Dg [Dgþ ð20Þ
wgk ¼
X
r2Dg
X
q2Qr
fr;qk � gr;q; 8k 2 S ð21Þ
wgþk ¼
X
r2Dgþ
X
q2Qr
fr;qk � gr;q; 8k 2 S ð22Þ
X
x2Xqxi � nx � wg
i þ wgþi ; 8i 2 S ð23Þ
X
x2Xqxi 1� px
i
� �
nx � wgþi ; 8i 2 S ð24Þ
66 M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks

sk �X
x2Xpxk � nx; 8k 2 S ð25Þ
X
m2Mnmk � Zm � wg
k þ wgþk þ sk; 8k 2 S
ð26Þ
The objective of the formulation is to minimizethe total amount of invested capacity as shownby (19). Constraint set (20) ensures that for everydemand relation r in either protection class, thereis enough flow over all eligible working routes tofully serve that demand. Constraint sets (21) and(22) ensure that the right amount of workingcapacity is allocated on each span k for the Goldand Gold-Plus protection classes respectively. Con-straint set (23) guarantees that there are enoughp-cycles in the solution to protect all workingcapacity units on all spans. To enforce the require-ment that paths in the Gold-Plus class have to berouted on straddling spans only, constraint set (24)ensures that for each span i, the number of p-cyclesthat span i straddles is enough to protect all workingcapacity units in the Gold-Plus class. (Note thatthrough constraint set (23), paths in the Gold classwill be protected either by p-cycles they straddle orby p-cycles on which they lie.) Constraint set (25)makes sure that there is enough protection capacityallocated on all spans to support all p-cycles in thesolution. Finally, constraint set (26) ensures thatthere is enough capacity placed on all spans to allowthe allocation of working and spare capacity asimposed by (21), (22), and (25).
3.3 p-Cycle Multi-Restorability Capacity
Placement (p-Cycle MRCP)
The approach proposed in this section is based onan evolution of the basic p-cycle principle in whichp-cycles can either be used to offer two backup
paths protecting two working links on any strad-dler – as in the normal p-cycle scheme – or twoprotection options for single working links on anystraddler. The latter option can be used for pro-tection of service paths with higher availabilityrequirements. Based on previous studies [5,14],we know that offering two or more restorationoptions instead of just one leads to great improve-ments of the availability of service. This new classof service, that we will call the Platinum class, istherefore expected to enjoy extremely high avail-ability and is almost guaranteed full restorability toany dual span-failures. The reason why we say‘‘almost’’ will be clarified shortly, for now let usconsider the illustration of the new p-cycle opera-tion mode for the Platinum class shown on Fig. 12.The p-cycle shown in Fig. 12(a) is identical to allprevious cases. It is composed of unit-capacityspare links. In Fig. 12(b), a first failure occurs on astraddling span and we assume that the consideredp-cycle protects one unit of Platinum-class workingcapacity on that straddling span. For that unit ofPlatinum-class working capacity, the p-cycle pro-vides a first protection option and the other side ofthe p-cycle remains unused and still pre-connected.In Fig. 12(c), a second failure occurs and hits thebackup path used to restore the Platinum-classservice path that had failed due to the first failure.In this case, the p-cycle provides a second protec-tion option for the Platinum-class working link onthe first failed straddling span.
Note that the second failure shown in Fig. 12(c)cannot affect any Platinum-class working linksthat would require the same p-cycle for their res-toration since Platinum-class working paths arerestricted to straddling spans. Only a working linkof Gold-class can be protected by that p-cycle onthat second failed span, and since we are in a dualspan-failure scenario it does not absolutely requireprotection. In fact, the only case in which a
p-cycle (b) First protection option (c) Second protection option (a)
Fig. 12. Protection against dual span-failures.
M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks 67

straddling link of the Platinum class could happennot to be restorable corresponds to sequence 5described in Fig. 6 of Section 2.3. Indeed, in casetwo crossing straddling spans fail and both have aPlatinum-class working link protected by the samegiven p-cycle, only one of the two Platinum-classworking links will be protected. One way to dealwith this question is by making sure in the deter-mination of the qx
k parameters that a p-cycle can-not protect two straddling spans at the same timeif these are in a crossing situation with respect tothat p-cycle. Another approach is to accept thatthere will be some unavailability due to that pos-sibility and to measure by simulation how muchunavailability this problem creates.
The multi restorability capacity placement(p-cycle MRCP) formulation is described below. Itfinds the optimal routing of demands and alloca-tion of capacity that minimizes the requiredcapacity placement subject to the routing con-straints described earlier.
p�CycleMRCP : MinimizeX
k2S
X
m2MCk �nmk
ð27Þ
Subject to:X
q2Qr
gr;q ¼ d r; 8r 2 Dg [Dp; ð28Þ
wgk ¼
X
r2Dg
X
q2Qr
fr;qk � gr;q; 8k 2 S ð29Þ
wpk ¼
X
r2Dp
X
q2Qr
fr;qk � gr;q; 8k 2 S ð30Þ
X
x2Xqxi � nx � wg
i þ 2 � wpi ; 8i 2 S ð31Þ
X
x2Xqxi 1� px
i
� �
nx � 2 � wpi ; 8i 2 S ð32Þ
sk �X
x2Xpxk � nx; 8k 2 S ð33Þ
X
m2Mnmk � Zm � wg
k þ wpk þ sk; 8k 2 S
ð34Þ
The objective function is the same as before.Constraint sets (28) to (30) are similar to con-straint sets (20) to (22) with class Gold-Plus beingreplaced by class Platinum. Constraint set (31) issimilar to (23) but unlike for the Gold-Plus pro-tection class, the Platinum protection class re-quires that a p-cycle provide two protectionoptions for a single working link in that class,therefore a factor 2 is added in front of the numberof working links in the Platinum class. Constraintset (32) ensures that Platinum-class working linkson any span i can only be protected by p-cyclesthat span i straddles. Finally, constraint sets (33)and (34) are similar to (25) and (26) in the previousformulation.
3.4 Experimental Results
The two formulations were tested with the net-works portrayed in Fig. 13. These networks aredescribed in details in [15]. The demand matricesconsidered in our design experiments are identicalto the ones described in [15] with the number ofdemand units for each node pair multiplied by 10in order to make it easier to vary the percentage ofpriority demands (GoldPlus or Platinum) for eachdemand pair. For both design formulations andfor the three test networks, we considered the 10
2
1
3
4
56
MIL
VIEZURPAR
LUXBRU
LONAMS
COP
BER
PRA
1
2
3
5
7
6
8
4
9
1011 12
(a) 06n14s1 (b) 11n26s2 (COST239) (c) 12n30s1
Fig. 13. Test networks.
68 M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks

shortest routes by distance as eligible workingroutes for each node pair. For network 06n14s1 alleligible cycles were considered, whereas for theother two test networks we limited the number ofeligible cycles to 1000 to keep solving times low.All results are based on a full CPLEX terminationor a MIPGAP of under 0.001 (i.e., solutions areprovably within 0.1% of optimal.)
Figure 14 shows the results obtained for thethree test networks with both formulation. Thecurves plotted in that figure show the increase intotal capacity cost of the optimal capacity designsolutions relative to the ‘‘All Gold’’ design for avarying percentage of priority demands. For eachdemand matrix tested (from 0% to 100% of pri-ority demands by 10% increments) the percentageof priority demands was changed uniformly overall demand pairs. For the SEACP formulation,results show that it is possible to serve up to60–70% of priority demands for a capacity penaltybelow 3%. As explained in the previous sections,priority demands with SEACP will benefit from anavailability improvement in the order of what wasobserved in Section 2.5. This suggests that pro-tecting straddlers is not only an advantage in terms
of improving the capacity efficiency of the p-cyclescheme (compared to ring protection), but it couldturn out as being the main way p-cycles are used.What we mean is that using straddlers to routedemands (or equivalently choosing p-cycles thatworking paths straddle) could be the default op-tion for most demands and routing demands onthe p-cycles could be reserved for a small per-centage of ‘‘lower priority’’ demands. Results ofthe MRCP formulation show that offering twoprotection options on each span along prioritypaths is much more costly, as compared to SEA-CP, in terms of capacity requirements. This isquite different from case of the MRCP formula-tion for span restoration [10] in which resultsshowed that we could serve up to 30-40% of highpriority paths – which in that case are truly guar-anteed restoration against dual-failures – for avery small capacity cost increase. The non-adapt-ability of the p-cycle mechanism considered here –in contrast with the very high adaptability of spanrestoration – results in an immediate capacityrequirement increase as soon as we introducesome priority demands. Depending on how muchsome customers would be ready to pay for the
0
5
10
15
20
25
30
35
40
45
50
0 10 20 30 40 50 60 70 80 90 1
Percentage of Priority (Gold-Plus or Platinum) demands
Rel
ativ
e in
crea
se in
tota
l cap
acity
cos
t (in
%)
00
06n14s1 - SEACP
11n26s2 - SEACP
12n30s1 - SEACP
06n14s1 - MRCP
11n26s2 - MRCP
12n30s1 - MRCP
Fig. 14. SEACP and MRCP design results.
M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks 69

availability improvement that comes with thePlatinum class, this MRCP design approach couldhowever be a good strategy. It is interesting toobserve that if only a small fraction of customersopt for the Platinum class – as it is usually the casewhen the cost is significantly higher – the likeli-hood of the second backup path of a Platinumdemand not to be available will be expected to besmall, bringing that class even closer to a truedual-failure protected class.
4 Conclusion and Future Work
This paper has presented the first analyticaltreatment of the availability of paths in p-cyclenetworks. The results presented show the keyimportance of cycle size for the resulting pathavailability. Indeed, increasing the size of p-cyclesresults in a direct linear increase of the unavail-ability of paths. Using smaller cycles is thereforepreferable in terms of availability of paths, al-though this was shown to degrade the capacityefficiency of the p-cycle mechanism by previousstudies. This paper also shows the advantage ofrouting paths on straddling spans as opposed toon-cycle spans. The examples of path unavail-ability calculation presented suggest that a paththat is systematically routed on straddling spansenjoys a 18–25% lower unavailability than a paththat is routed on on-cycle spans only. Based on theinsights provided by these results, we then pre-sented two new formulations for demand routingand capacity design for p-cycle based networks.The first one, SEACP, can guarantee that selectedpriority paths will be routed exclusively on straddlingspans, therefore enjoying an availability improve-ment, whereas other paths are routed either onstraddling spans or on on-cycle spans. The secondone,MRCP, offers two protection options to selectedpriority paths by routing them on straddling spansand allowing them to access either sides of the cyclethey straddle. Design results show that a fairly largeproportion (60–70%) of priority paths can be servedfor a quite small capacity requirement increase withSEACP, whereas with MRCP capacity requirementincrease rapidly with an increasing proportion ofpriority demands. However, the availability of pri-ority paths with MRCP is expected to be very muchhigher than that of priority paths with SEACP.
Future work on this topic will be to study theavailability of priority paths with MRCPdepending on the proportion of these prioritypaths. In particular it will be important to measurethe frequency of cases where the second backuppath is not available for a priority demand and todetermine the impact of such scenarios on theavailability of priority paths.
Notes
1. What we call links in this work are unit capacity transmis-sion channels, not to be confused with spans which refer tothe set of all links connecting two adjacent nodes of thephysical transmission network graph
2. For example, five restoration switching times per year of2 s each in response to single failures contribute a totalunavailability of 3.17 · 10)7 each, but a single exposure in tenyears to a 6 h outage due to unrestorability in the face of adual failure contributes 6.84 · 10)5 to the path unavailability.
3. The sum of unavailabilities is a well-established and well-verified approximation for the product of availabilitieswhere all availabilities being considered are in practice closeto 100% [11].
References
[1] D. Stamatelakis, W. D. Grover, Theoretical underpinnings
for the efficiency of restorable networks Using pre-con-
figured cycles (‘‘p-cycles’’), IEEE Transactions on Com-
munications, vol. 48, no. 8, (August 2000), pp. 1262–1265.
[2] W. D. Grover, D. Stamatelakis, Cycle-oriented distributed
preconfiguration: ring-like speed with mesh-like capacity
for self-planning network restoration, Proceedings of ICC
1998, vol. 1, (Atlanta, GA, USA, June 1998), pp. 537–543.
[3] W. D. Grover, D. Stamatelakis, Bridging the ring-mesh
dichotomy with p-cycles, Proceedings of DRCN 2000,
(Munich, Germany, April 2000), pp. 92–104.
[4] W. D. Grover, High availability path design in ring-
based optical networks, IEEE/ACM Transactions on
Networking, vol. 7, no. 4, (August 1999), pp. 558–574.
[5] M. Clouqueur, W. D. Grover, Availability analysis or
span-restorable mesh networks, IEEE Journal on Se-
lected Areas in Communications, vol. 20, no. 4, (May
2002), pp. 810–821.
[6] D. A. Schupke, The tradeoff between the number of
deployed p-cycles and the survivability to dual fiber duct
failures, Proceedings of ICC 2003, vol. 2, (Anchorage,
AL, USA, May 2003), pp. 1428–1432.
[7] D. A. Schupke, Multiple failure survivability in WDM
networks with p-cycles, Proceedings of ISCAS 2003, vol.
3, (Bangkok, Thailand, May 2003), pp. III/866–869.
[8] M. Clouqueur, W. D. Grover, Computational and de-
sign studies on the unavailability of mesh-restorable
networks, Proceedings of DRCN 2000, (Munich, Ger-
many, April 2000), pp. 181–186.
70 M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks

[9] D. A. Schupke, W. D. Grover, M. Clouqueur, Strategies
for enhanced dual-failure restorability with static or re-
configurable p-cycle networks, Proceedings of ICC 2004,
vol. 3, (Paris France, June 2004), pp. 1628–1633.
[10] M. Clouqueur, W. D. Grover, Mesh-restorable networks
with complete dual failure restorability and with selec-
tively enhanced dual-failure restorability properties,
Proceedings of SPIE OptiComm 2002, (Boston, MA,
USA, July 2002), pp. 1–12.
[11] R. L. Freeman, Telecommunication System Engineering.
3 ed. (Wiley, New York, 1996).
[12] M. Herzberg, S. Bye, An optimal spare-capacity assign-
ment model for survivable networks with hop limits,
Proceedings of IEEE GLOBECOM 1994, vol. 3, (San
Francisco, CA, USA, November 1994), pp. 1601–1607.
[13] W. D. Grover, Mesh-based Survivable Networks: Op-
tions and Strategies for Optical, MPLS, SONET and
ATM Networking, (Prentice Hall, 2003).
[14] D. Arci, et al., Availability models for protection tech-
niques in WDM networks, Proceedings of DRCN 2003,
(Banff, AB, Canada, October 2003), pp. 158–166.
[15] M. Clouqueur, Availability of Service in Mesh-Restor-
able Transport Networks, Ph.D. Thesis, Dpartment of
Electrical and Computer Engineering, University of Al-
berta, Edmonton, Alberta, Canada, spring 2004.
Matthieu Clouqueur is a graduate
from Ecole Nationale Superieure de
l¢Electronique et de ses Applications
(National School of Electronics and
Electrical Engineering), France. In
1998, he joined TRLabs at the Univer-
sity of Alberta, Edmonton, Canada to
start his graduate studies in the Net-
work Systems Group. At the end of
2003, he completed his Ph.D. work on
the topic of ‘‘service availability in
mesh-restorable transport networks.’’
He is now a Research Scientist at Sie-
mens, Corporate Technology in Munich, Germany. His re-
search interests include all topics related to the optimal design
of optical transport networks and network survivability.
Wayne D. Grover obtained his
B.Eng from Carleton University, an
M.Sc. from the University of Essex,
and Ph.D. from the University of Al-
berta, all in Electrical Engineering. He
had 10 years experience as scientific
staff and management at BNR (now
Nortel Networks) on fiber optics,
switching systems, digital radio and
other areas before joining TRLabs as
its founding Technical VP in 1986. In
this position he was responsible for the
development of the TRLabs research program and contributing
to development of the TRLabs sponsorship base and he saw
TRLabs through its early growth as a start-up to over the 100-
person level. He now functions as Chief Scientist – Network
Systems, at TRLabs and as Professor, Electrical and Computer
Engineering, at the University of Alberta. He has patents issued
or pending on 26 topics to date and in has received two TRLabs
Technology Commercialization Awards for the licensing of
restoration and network-design related technologies to indus-
try. He is a recipient of the IEEE Baker Prize Paper Award for
his work on self-organizing networks, as well as an IEEE
Canada Outstanding Engineer Award, an Alberta Science and
Technology Leadership Award and the University of Alberta’s
Martha Cook-Piper Research Award. In 2001–2002 he is also
holder of a prestigious NSERC E.R.W. Steacie Memorial
Fellowship. He is a P.Eng. in the Province of Alberta and a
member of SPIE and a Fellow of the IEEE.
M. Clouqueur, W.D. Grover/Availability Analysis of p-Cycle-Based Networks 71





























