Embed Size (px)
Citation preview

Autonomous Speed Control Vehicle
RIT Computer Engineering Senior Design Project Fall 2006
Designed by: Laura Celentano, Glenn Ramsey, and Michael Szalkowski
User InterfaceThe user interface consists of two switches two lights, and two seven-segment displays. The seven-segment displays show the speed of the vehicle in ft/s. One switch/light pair corresponds to power, the other to operations. The details of the operation are in the tables below.
Switch Up Down
Power Power is off Power is on
Operational
System is halted
System is running
Light Function Description
Red Power On when the power is on
Green Operation
On when the system is running
Track Following
Load Sensor Input
CurrentSensor
Input Equal to PreviousSensorInput?
Yes
Lose Any Back Sensors
From Last Time?
No
Load Previous Sensor Input
Store Current Sensor Input to Previous Sensor Input
Use Sensor Input to Index into Look-up Table and Retrieve Turning Value
Yes No
FrontLeft
FrontMiddle
FrontRight
BackLeft
BackRight
Turn
Off Off Off Off Off Center
Off Off Off Off On Right Hard
Off Off Off On Off Left Hard
Off Off Off On On Right Hard
Off Off On Off Off Right Hard
Off Off On Off On Right Hard
Off Off On On Off Right Hard
Off Off On On On Right Hard
Off On Off Off Off Center
Off On Off Off On Center
Off On Off On Off Center
Off On Off On On Center
Off On On Off Off Right Soft
Off On On Off On Right Soft
Off On On On Off Right Soft
Off On On On On Right Hard
On Off Off Off Off Left Hard
On Off Off Off On Left Hard
On Off Off On Off Left Hard
On Off Off On On Left Hard
On Off On Off Off Center
On Off On Off On Center
On Off On On Off Center
On Off On On On Center
On On Off Off Off Left Soft
On On Off Off On Left Soft
On On Off On Off Left Soft
On On Off On On Left Hard
On On On Off Off Center
On On On Off On Left Hard
On On On On Off Right Hard
On On On On On Center
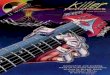
The track following algorithm utilizes five optoreflector sensors mounted on the underside of the vehicle. Three sensors are mounted at the front of the vehicle and two are mounted at the rear. When the vehicle is properly following the track, all five sensors should detect the track. The sensor values are polled by the microcontroller. The implemented algorithm can be seen in the flow chart below. The algorithm utilizes a look-up table to determine how the vehicle should turn to stay on the track depending on the sensor values. This look-up table can be seen below.
Speed Limit Detection
Speed Control
Project Costs
Power Operation
Off
On
Off
On
The speed control consists of both measuring and adjusting the speed of the vehicle. Measuring the speed is accomplished by a shaft encoder mounted on the rear axle. An opto-interrupter is mounted in such a way as to generate a square wave as the vehicle moves. The frequency of the wave is directly proportional to the speed of the vehicle. Controlling the speed is done through the use of an H-Bridge. The speed duty cycle is adjusted up and down according to the desired speed until it matches.
Additionally, the turning amount must be taken into account in the speed control. This is because the friction increases when the vehicle goes into a turn and decreases when it comes out of a turn. This is taken into account by detecting turn changes and adding or subtracting empirically determined constants from the speed duty cycle.
Item Our Cost Actual Cost
HCS12 Microcontroller $0 $130
Vehicle $40 $40
Direction Control Hardware $0 $10
Speed Control Hardware $15 $15
Speed Limit Detection Hardware $10 $10
Track Following Hardware $15 $15
Track and Overpass Construction $20 $50
User Interface Hardware $12 $12
Power Subsystem Hardware $30 $30
Total: $142 $312
The objective of this project was to create an autonomously speed controlled vehicle. The vehicle follows an oval reflective track through the use of infrared sensors mounted on the underside of the vehicle. Infrared sensors mounted on the roof of the vehicle detect reflective patterns on the underside of overpasses. These patterns correspond to different speeds. The vehicle’s speed is controlled to match the last recognized pattern.
Overview
From Left-to-Right
Laura Celentano
Responsiblity: Track-Following
Glenn Ramsey
Responsibility: Speed Control
Michael Szalkowski:
Responsibility: Speed Limit Detection
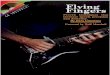
In order to detect the speed limit, it was important that the correct bit pattern be interpreted. In order to alleviate this problem, a comparator algorithm was used, and can be seen in Figure 1. By comparing the patterns stored in memory at the current time to some previous time, one can decipher the bit pattern under the underpass. The sensor input will automatically shift the bit pattern into memory serially. If they differ, it will update the previous bit pattern variable with the current one. Once a bit pattern has been found not to change (like right after the vehicle exits the underpass), it will set the new desired speed based on the bit pattern. The threshold time that was found to work best after testing was 1 second.
Increment Counter Every 50 ms
Counter > Threshold?
YesNoIncrement Time Counter
Clear Time Counter
Previous Pattern = Current Pattern?
No Set new DesiredSpeed
YesSet Previous Pattern with
Current Pattern
Set Previous Pattern with Current Pattern. Reset Current Pattern
Load Sensor Input Every 50 ms
Input Different from last?
No
Yes Left Shift it into Current Pattern