-
8/3/2019 Autonomous Mobile Platform
1/5
Autonomous Mobile Platform II
Krzysztof Jaskot, Artur Babiarz
Institute of Automatic Control
Silesian University of Technology
Gliwice, Polande-mail: [email protected],
[email protected]
Abstract The paper presents design of autonomous mobile
platform based on the all terrain 1/8th scale four wheel
drive
radio control model. In this paper was considered problem of
automatic control of mobile platform using information from
GPS system, electronic compass and encoder. The mobile
platform is equipped in two-stroke glow engine, heavy-duty
drive train and wide-track suspension and controller based
on
ARM7 microcontroller and using MaxStream XBee Pro
2.4GHz radio modem communication module. The base station
equipment is also described. Communication protocol
betweenmobile platform and base station is presented. The paper
presents also an application of electronic compass to
measure
azimuth of mobile platform. Problem of speed and distance
control is described. Autonomous mobile platform is a
machine
that can operate in a human-made environment. By control in
this case we will understand to be able to avoid collisions
with
obstacles (other mobile platforms and walls) during drive.
Results of real application are also shown. Results of work
on
autonomous mobile platform that can operate in human
environment are presented. The obtained properties of the
system have been effected that it can be used for future
research and autopilot design project.
Keywords: mobile platform, sensors, communication,
microcontroller
I. INTRODUCTION
The aim of the project was to create an autonomous
mobile platform, which could operate in open terrain.
Autonomous mobile platform is a machine that can operate
in a human-made environment [4,5,6,7]. The key to
autonomy is a control system built on the basis of
information concerning the position and goal.Use GPS NMEA
(National Marine Electronic
Association) protocol allows you to obtain information intext
form about the current location of the object. Afteradding
information about the intermediate target points(Waypoint), we can
receive information about the currentdirection [8]. After the
experiments conducted and described
in the article [2] been amended accordingly to increase
theaccuracy of determining the direction of movement andspeed
control.
The work was considered problem use informationderived from the
GPS and IMU (Inertial MeasurementSystem) [3] as a source of control
signal. In addition, weuses also information from the speed sensor.
IMU currently
provides only information from the electronic compass.
Thisinformation is needed to determine the azimuth of
mobileplatform.
II. MOBILE PLATFORM
As described in the article [2] mobile platform has been
built using a remote-controlled car on a scale 1/8th (length
55cm, width 43cm) and it was delivered by the HPI Racing.
Selected terrain model with an independent suspension and
four-wheel drive (4WD), because we wanted to create an
autonomous platform that can operate in open terrain. The
appearance of old version of mobile platform with installed
controller and the GPS system is shown in figure 1.
Figure 1. Old version of mobile platform.
As the propulsion system used in this model, two-strokeinternal
combustion engine with a capacity of 3.5cm3 andpower 2HP. This
allows the dispersal model to speed about60km/h. In addition to the
chassis and drive train in thecomposition of the platform includes
two servos, which areresponsible for controlling the throttle/brake
and course.
These two servos give us the ability to control the
platformtraction. After the experiments described in the article
[2] wechange the appearance of mobile platform. We addaluminum
frame with installed GPS and 2.4GHz antenna.Aluminum frame prevents
any interference generated byworking servos, engine (gearbox). We
also add new
167978-1-61284-361-2/11/$26.00 c2011 IEEE
-
8/3/2019 Autonomous Mobile Platform
2/5
controller and IMU system. The appearance of new versionof
mobile platform is shown in figure 2.
Figure 2. Mobile platform.
Where: 1- aluminum frame, 2- GPS, 3- antenna 2.4Ghz, 4-main
controller, 5- IMU, 6- batteries.
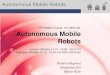
III. CONTROL SYSTEM
Figure 3 shows a block diagram of the main controller.
The heart of the autonomous vehicle is mounted in the car-
driver will be built using a microcontroller AT91SAM7S,
managing servo, all sensors, power supply and wireless
communication.
To build a control system for mobile platform we
usesmicrocontroller AT91SAM7S256 (ARM7 Core) it was
delivered by the ATMEL. He is responsible for collecting
information from sensors, processing them, the exercise of
control algorithms and generate servo control signals. In
addition, it enables wireless communication, reading values
of the individual, shared variables and modify them. Basic
features of the microcontroller is: RISC architecture,
maximum speed clock 60 MHz 256 KB FLASH program
memory, 64KB SRAM memory, interrupt controller, three
16-bits timers, four 16-bits PWM modules, three USART
interface, USB controller, I2C bus, two SSP, SPI bus,
11-channels 10-bits A/D converter [9].
The microcontroller of our choice has also some otherinteresting
features, such as on board USB controller that
together with SAM-BA Boot Assistant provides an easy and
fast way of programming the ARM. We have also the JTAG
interface, which provides hardware debugging capabilities.
The main functions of the controller are: collecting
information from sensors, generating servo control signals
through the implementation of control algorithms based on
readings from sensors, providing two-way wireless
communication with a PC (telemetry, simulation), I2C
management. The process of autonomous control based on
sensor readings of the following:
GPS - provides information on the location of the car on the
globe, can also be a source of information about vehicle
speed and orientation relative to the direction north.
Electronic compass (IMU) - allows you to specify the
orientation of the car towards the north.Rotation sensor -
provides information about the angular
velocity of the drive shaft speed of the car and indirectly,
used as a source of feedback for the speed.
Other sensors, such as: temperature sensors [1], ultrasonic
rangefinders, may be connected to an external derived I2C
bus driver.
Figure 3. Block diagram of the controller.
Main controller using the AT91 microcontroller is shown
in figure 4. The controller is equipped with a plate
operator
panel with LCD, LEDs and push buttons for menu operation
serving. With them you can read some of the performance
of the program, namely: as GPS data, compass reading.
During normal operation, the buttons are not available
because the case is sealed. Then the display shows the next
cycle menus that contain the most relevant data. Sample
screens are shown in figure 5.
The aim of the work is to create an autonomous vehicle,but at
the prototype stage and testing is necessary to reduce
its autonomy and ensure operator efficiency even take
control of the car, which for various reasons, may start to
behave unpredictably. Application of five-channel FM RC
controller allowed the design of switch mode AMS
(Autonomous/Manual Switch).
168 2011 12th International Carpathian Control Conference
(ICCC)
-
8/3/2019 Autonomous Mobile Platform
3/5
Figure 4. Main controller with user interface.
Two channels, as in the case of a simple remote control, areused
to transmit information about the location and direction
of the throttle servo. A third channel, acts as a switch to
allow the change of source signals servomechanisms
between the apparatus of the FM (manual) and
microcontroller (autonomous). In addition, upon failure of
the FM signal from the apparatus or GPS, followed by
AMSemergency stop of the vehicle. AMS switch is built using 8-
bit microcontroller from Atmel - ATMega8. It is also
connected to the I2C bus of main controller.
Figure 5. User interface.
The controller consists of two mounted in a housing
designed for the project PCB and LCD. In total, this creates
a three-layer structure. Connection with external devices is
via connectors placed on the body. Furthermore, inside
thecontroller can be mounted battery with dimensions
65x40x10mm. Visualization of the main controller is shown
in figure 6.
Figure 6. Visualisation of main controller.
In addition to the equipment fitted on mobile platform
available to the operator is base station, which includes:
remote control transmitter manual control andauto/manual switch,
radio communication module XBee
PRO 2.4GHz sending/receiving data to/from the vehicle,
computer witch control application providing remote
viewing operating parameters of the control system mounted
on a platform. Figure 7 shows a system using wireless
communication modules, XBee PRO. These modules
operate in transparent mode. This means that any data sent
to the first module will be unchanged at the output of the
second module. Communication with the modules is done
using a UART protocol, which is easy to implement in the
microcontroller AT91SAM7S. From the PC side it is
necessary to convert the signals. After the application
ofFT232RL FTDI and appropriate drivers on your computer,
you can create a virtual serial port.
Figure 7. Full duplex communication between PC and
controller.
Communication between the controller and the computer
is realized in the form of data frames. An example of a data
frame containing the request and response are shown in
figure 8.Request:
Response:
Figure 8. Example of a data frames.
This frame allows you to read off the value ofn variables.
In
the body frame includes a request ID variable in
hexadecimal, separated by commas. The answer of
controller is frame containing a comma-separated variables.
ARM7TDMI processor architecture allows you to install
an RTOS (Real Time Operating System). The operating
system allows the division of tasks performed by the
microcontroller processes. All tasks are performed
simultaneously which is referred to as multitasking. The
operating system also provides mechanisms for
communication between processes and synchronization
tasks. The core of the system takes over responsibility for
the allocation of CPU time for the process, taking intoaccount
the priorities of processes and supporting a
notification of interruption.
The application of controller operates under the
FreeRTOS system [10]. It is optimized for embedded
systems with low hardware resources consists of only three
source files written in C. FreeRTOS also makes dynamic
2011 12th International Carpathian Control Conference (ICCC)
169
-
8/3/2019 Autonomous Mobile Platform
4/5
memory management, create lists and introduces features to
process execution pauses for a specified period of time.
Figure 9 shows the diagram of mechanisms for exchange ofdata
between the key elements of the microcontroller
software to which they are: processes - constantly running
in
a loop programs, drivers - used, among others by processes
to communicate with microcontroller peripherals.
Autonomous vehicle program consists of 6 processes
which have been divided between tasks. The process of
"GPS" is responsible for operating the GPS receiver. When
you receive the correct line of NMEA 0183 (every 5ms) is
processed, and read data update the corresponding variables.
The process of "IMU" collects data from the IMU device
driver via UART0, every 20 ms is sent to query the value of
the magnetic compass reading. The process of "interface" isused
to refresh the driver of the operating panel is currently
displayed on the LCD. The process of "LED" acts as a
signal generator, reporting via LEDs on the correct
behavior. The process of "control" uses data to assess the
state in which currently there is a car (including position,
speed, azimuth), and then using the implemented algorithms
update a servo settings. The process of "communication" is
the basis of telemetric system of the car.
Figure 9. Division of microcontroller programs and threads used
forperipherals and their drivers.
IV. R ESULTS
Test drives using the built controller were implementedin
several stages. The first was the verification of the systemof GPS
and radio communications transmissionmeasurements to the base
station. At this stage, was carriedout manual control of direction
and throttle. The results ofthis test are shown in figure 10. Test
results for the manualcontrol shows a high accuracy to obtain
information from
GPS.The second test phase was to incorporate automatic
direction and throttle control. Information on the target
points WP1WP7 was recorded in the memory of themicrocontroller.
In an exemplary control algorithm usingtwo independent controllers.
First, the block diagram shownin Figure 11, controls the servo
direction. It seeks to
minimize the difference between the azimuth obtained in
thecalculations in the perception stage, and a given azimuth.
Figure 10. Results of test GPS system.
The latter is the direction from which the car should move
toreach the waypoint in a straight line. This system is a
PIDregulator, extended with additional capabilities.
Figure 11. Block diagram of the azimuth control system.
The second controller shown in Figure 12 controls the speed
servo uses a PI regulator. Preset speed depends on the
quality of data obtained in the stage of perception. It is
estimated based on the number of satellites used by the GPS
receiver to measure the position.
Figure 12. Block diagram of speed control.
If their number is less than 4, the quality is considered
satisfactory and speed reference is 0. Otherwise, it is
different from zero and can take two values. The value of
fast (1m/s) applies only when the car is already headed
toward the via point and not located closer than 2m from it.If
the distance is less than 2m predetermined value of speed
is 0.25m /s. This helps the controller to turn the direction
of
the correct execution.
Example of autonomous waypoints navigation (Fig. 13)
shows positions and orientation taken from GPS and
170 2011 12th International Carpathian Control Conference
(ICCC)
-
8/3/2019 Autonomous Mobile Platform
5/5
electronic compass. During drive we also recorded
measurements such as velocity (GPS, encoder), azimuth
(GPS, electronic compass), servos (Figure 14).
Figure 13. Example of waypoints navigation.
V. SUMMARY
The proposed solution allows to control an autonomous
mobile platform using a GPS and electronic compass.
Further development of the mobile platform will beimplemented
will support the addition of sensors (eg laser
scanner, ultrasonic range finder), allowing to overcome
obstacles and to develop new control algorithms. After
applying the sensor system may need to change the glow
engine in the electric motor with reverse gear.
Figure 14. Examplary measurments recorded during autonomous
drive(Azimuth GPS, electronic compass; Speed GPS, encoder;
Servos).
ACKNOWLEDGMENT
This work has been supported by Ministry of Science andHigher
Education In the years 2010 2012 as developmentproject OR000132
12.
REFERENCES[1.] Babiarz A., Jaskot K.: Temperature control system
for
glow engine, Zeszyty Naukowe Politechniki lskiej,seria
Automatyka z.150 , s. 115-121, Gliwice 2008.
[2.] Babiarz A., Jaskot K.: Autonomous Mobile
Platform,International Carpathian Control Conference ICCC
2010, s. 179-183, Eger, Hungary.[3.] Babiarz A., Jaskot K.: The
inertial measurement unit for
detection of position. Electrical Review, ISSN 0033-2097, R. 86
NR 11a/2010, pp. 323-334.
[4.] Baker C. R., Dolan J. M.: Street Smarts for Boss
-Behavioral Subsystem Engineering for the UrbanChallenge, Robotics
& Automation Magazine, IEEE,Carnegie Mellon Univ., Pittsburgh,
PA, March 2009
[5.] Behringer R., Maurer M.:Results on Visual RoadRecognition
for Road Vehicle Guidance, Proceedings ofthe 1996 IEEE Intelligent
Vehicles Symposium, Tokyo,Japan 1996
[6.] Braun T., H. Schfer, K. Berns: Topological
Large-ScaleOff-road Navigation and Exploration RAVON at the
European Land Robot Trial 2008, The 2009 IEEE/RSJInternational
Conference on Intelligent Robots and
Systems, St. Louis, USA, October 2009[7.] Harkins R. et
al.,Design and testing of an autonomous
highly mobile robot in beach environment, Proceedingsof the
World Congress on Engineering and Computer
Science 2008 WCECS 2008, October 22 - 24, 2008, SanFrancisco,
USA
[8.] Jaskot K.:Implementation of GPS information to control
of UAV model, ZN Politechniki Rzeszowskiej,Mechanika z.71
Awionika, Rzeszw 2007, ISBN 0209-2689.
[9.] AT91 ARM Thumb-based Microcontrollers, ATMEL[10.] FreeRTOS
ARM7, www.freertos.org
2011 12th International Carpathian Control Conference (ICCC)
171